JP2011136824A - Elevator system and control method thereof - Google Patents
Elevator system and control method thereof Download PDFInfo
- Publication number
- JP2011136824A JP2011136824A JP2009299169A JP2009299169A JP2011136824A JP 2011136824 A JP2011136824 A JP 2011136824A JP 2009299169 A JP2009299169 A JP 2009299169A JP 2009299169 A JP2009299169 A JP 2009299169A JP 2011136824 A JP2011136824 A JP 2011136824A
- Authority
- JP
- Japan
- Prior art keywords
- landing
- elevator
- human sensor
- car
- person
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims abstract description 47
- 238000001514 detection method Methods 0.000 claims description 38
- SAZUGELZHZOXHB-UHFFFAOYSA-N acecarbromal Chemical compound CCC(Br)(CC)C(=O)NC(=O)NC(C)=O SAZUGELZHZOXHB-UHFFFAOYSA-N 0.000 claims 1
- 230000003028 elevating effect Effects 0.000 claims 1
- 230000005540 biological transmission Effects 0.000 description 21
- 238000010586 diagram Methods 0.000 description 12
- 230000008054 signal transmission Effects 0.000 description 11
- 238000013500 data storage Methods 0.000 description 10
- 230000000694 effects Effects 0.000 description 7
- 239000000470 constituent Substances 0.000 description 5
- 230000000007 visual effect Effects 0.000 description 4
- 230000001174 ascending effect Effects 0.000 description 2
- 238000012544 monitoring process Methods 0.000 description 2
- 208000032041 Hearing impaired Diseases 0.000 description 1
- 241000282412 Homo Species 0.000 description 1
- 230000032683 aging Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000001276 controlling effect Effects 0.000 description 1
- 210000005069 ears Anatomy 0.000 description 1
- 238000005265 energy consumption Methods 0.000 description 1
- 230000001771 impaired effect Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 239000000779 smoke Substances 0.000 description 1
Images











Landscapes
- Indicating And Signalling Devices For Elevators (AREA)
- Maintenance And Inspection Apparatuses For Elevators (AREA)
Abstract
Description
本発明は、エレベータシステムおよびその制御方法に関し、特に、火災発生に備えたエレベータシステムおよびその制御方法に関する。 The present invention relates to an elevator system and a control method thereof, and more particularly, to an elevator system and a control method thereof in preparation for a fire occurrence.
事務所ビルあるいはショッピングセンタ等で火災が起きたときに、在館者はエレベータやエスカレータではなく階段で避難するように指導されている。実際、日本に限らず海外でも、エレベータ内やエレベータホールには、火災の時にはエレベータを使わずに階段を使うようにとの注意書きを目にすることが多い。しかし、過去の火災において、特に火災初期にはエレベータを用いて避難を行ったケースが少なからずあるのも事実である。一方、先進各国、特に、日本では高齢者の割合が急速に増加しつつある。このことは、ビル等における火災等の緊急避難時に階段利用が困難となる人々の数が、年々増えてゆくことを予想させる。避難にエレベータを利用する潜在的な要求は従来からあったが、高齢化やバリアフリー化の進展に伴って、近年、徐々に顕在的な要求として語られ始めている。とりわけ、2001年9月11日に発生した世界貿易センタービルの飛行機衝突による崩壊以降、米国ではたとえ超高層ビルであっても、従来の火災階近辺の部分避難に止まらず、スムーズな全館避難の要求が高まってきており、この機運と相まって米国ではエレベータの緊急時利用の議論も高まっている。 Residents are instructed to evacuate by stairs, not elevators or escalators, when a fire breaks out in an office building or shopping center. In fact, not only in Japan but also overseas, we often see cautions not to use elevators in elevators and elevator halls, but to use stairs in the event of a fire. However, in the past fires, it is also true that there are not a few cases of evacuation using elevators, especially in the early days of fire. On the other hand, the proportion of elderly people is rapidly increasing in developed countries, especially in Japan. This makes it possible to predict that the number of people who have difficulty using stairs during an emergency evacuation such as a fire in a building will increase year by year. Although there has been a potential demand for using an elevator for evacuation in the past, with the progress of aging and becoming barrier-free, in recent years, it has begun to be spoken gradually as an obvious demand. In particular, since the collapse of the World Trade Center Building on September 11, 2001, due to a plane collision, even in the United States, even if it was a skyscraper, there was a need for a smooth evacuation of the entire building, not just the conventional partial evacuation near the fire floor. Coupled with this momentum, there is a growing debate about the emergency use of elevators in the United States.
我が国でも、2003年3月の「規制改革推進3カ年計画」において、「車椅子利用者などの身体障害者や高齢者等の被災時における安全かつ迅速な避難を確保するため、エレベータ周辺の待機場所等を含むエレベータの安全性に十分配慮した上で、身体障害者、高齢者等の避難手段としてのエレベータ利用についてソフト面も含めて検討する。」こととされている。 In Japan, in the “Regulatory Reform Promotion Three-Year Plan” in March 2003, “Stand-by places around elevators to ensure safe and prompt evacuation in the event of disasters such as disabled persons such as wheelchair users and the elderly. "We will consider the use of elevators as a means of evacuation for persons with physical disabilities, elderly people, etc., considering the safety of elevators, etc."
このような背景から、近年、火災等の災害が発生した場合に、積極的にエレベータを利用して、迅速に在館者を避難階へ避難させることができるエレベータを提供することが検討されている。 Against this background, in recent years, in the event of a disaster such as a fire, it has been considered to provide an elevator that can promptly evacuate residents to the evacuation floor by actively using the elevator. Yes.
火災が発生すると建物には大量な煙が発生し、在館者はパニック状態になり、在館者が、例えば、乗り場呼びボタンを押したが到着を待ちきれず別の手段で避難してしまう場合など、呼びボタンを誤って操作した場合でも、エレベータかごは登録された乗り場呼びに応じて走行するため、無駄な運行を行ってしまい、その結果、避難時間が長くなり他の在館者が迅速に避難できないなどの問題点がある。 When a fire breaks out, a lot of smoke is generated in the building, the resident panics, and the resident evacuates by another means, for example, pressing the landing call button but waiting for arrival Even if the call button is operated by mistake, the elevator car will run according to the registered landing call, resulting in useless operation, resulting in longer evacuation time and other residents There are problems such as being unable to evacuate quickly.
特許文献1には、エレベータの停止階に監視カメラを設け、エレベータかごが向かう停止階の乗り場を監視カメラで撮像し、撮像された画像を処理し、この処理結果から搭乗待ちの人数を求め、求められた待ち人数とエレベータかご内の行き先階指定ボタンの押下状態によって、各停止階でのエレベータかごの停止・通過を判定するエレベータシステムおよびエレベータ制御方法が開示されている。この先行技術によれば、エレベータに搭乗する人の輸送効率の向上は期待されるものの、監視カメラを各階に設置する必要があり、また、多大なコンピュータリソースを要する画像処理が必要となる。さらに、平常時の輸送効率のみしか考慮していないため、火災発生時のような非常事態において、在館者が避難のためにエレベータを利用する場合には、必ずしも適合しない問題点がある。 In Patent Document 1, a monitoring camera is provided on the stop floor of the elevator, the stop floor where the elevator car is headed is picked up by the monitoring camera, the picked-up image is processed, and the number of people waiting for boarding is obtained from the processing result, There is disclosed an elevator system and an elevator control method for determining stop / pass of an elevator car at each stop floor based on the determined number of waiting persons and the pressed state of a destination floor designation button in the elevator car. According to this prior art, although it is expected that the transportation efficiency of the person who rides the elevator will be improved, it is necessary to install surveillance cameras on each floor, and image processing that requires a great amount of computer resources is required. Furthermore, since only the transportation efficiency in normal times is taken into consideration, there is a problem that is not always suitable when an occupant uses an elevator for evacuation in an emergency such as a fire.
本発明は、上記のような問題点に鑑みてなされたもので、火災発生時にエレベータを利用して避難する在館者の避難時間を短縮可能なエレベータシステムまたはその制御方法を提供することを目的とする。 The present invention has been made in view of the above problems, and an object of the present invention is to provide an elevator system or a control method thereof that can shorten the evacuation time of a resident who evacuates using an elevator when a fire occurs. And
本発明の実施形態によるエレベータシステムは、建物に設置されたエレベータのかごを走行させる昇降手段と、エレベータの着床階の乗り場のそれぞれに設けられ、かごを呼び出すための乗り場呼びボタンと、エレベータのかごの位置を検出するかご位置検出手段と、エレベータの着床階の乗り場のそれぞれに設けられ、その乗り場に居る人の存否を検出する人感センサと、制御手段とを備える。制御手段は、昇降手段を制御する機能と、乗り場呼びボタンから受信する信号に基づいて乗り場呼び登録を行う機能と、かご位置検出手段から受信するかごの位置データと乗り場呼び登録された乗り場の位置に基づいて乗り場呼び登録された乗り場に着床する減速タイミングから遡った所定の時間に対応する所定の昇降距離範囲を算出する機能と、人感センサから受信する信号に基づいて当該人感センサが設けられた乗り場に人が居るか否かを判断する機能と、建物に設けられた火災検知手段から火災発生信号を受信したときにエレベータを平常運転から避難運転に切り替える機能とを有する。 An elevator system according to an embodiment of the present invention includes an elevator means for running an elevator car installed in a building, a landing call button for calling the car, provided at each landing floor of the elevator floor, A car position detecting means for detecting the position of the car, a human sensor provided at each landing floor of the elevator landing floor for detecting the presence or absence of a person at the landing, and a control means. The control means includes a function for controlling the lifting means, a function for registering a landing call based on a signal received from the landing call button, a car position data received from the car position detecting means, and a landing position registered for the landing call. Based on the function of calculating a predetermined lift distance range corresponding to a predetermined time that goes back from the deceleration timing of landing at the landing registered on the landing call, and the human sensor based on a signal received from the human sensor It has a function of determining whether or not there is a person at the provided platform, and a function of switching the elevator from the normal operation to the evacuation operation when a fire occurrence signal is received from the fire detection means provided in the building.
避難運転時において、制御手段は、建物の避難階への走行方向と一致する走行方向の乗り場呼び登録が存在し、かつ、エレベータのかごが所定の昇降範囲に入ったことをかご位置検出手段から受信した場合にのみ、前記一致する走行方向の乗り場呼び登録に対応する乗り場に設けられた人感センサを起動し、この人感センサから受信する信号に基づいて人が居ないと判断したときには前記一致する走行方向の乗り場呼び登録を取り消す。ここで、避難階は、いわゆる安全階であり、火災管制運転の際の呼び戻し階を指す。 During evacuation operation, the control means detects from the car position detection means that there is a landing call registration in the traveling direction that matches the traveling direction to the evacuation floor of the building, and that the elevator car has entered the predetermined lift range. Only when it is received, the human sensor provided at the landing corresponding to the landing call registration in the corresponding traveling direction is activated, and when it is determined that there is no person based on the signal received from this human sensor, Cancel the landing call registration for the matching driving direction. Here, the evacuation floor is a so-called safety floor, and refers to a recall floor at the time of fire control operation.
本発明によれば、火災が起きた建物の在館者が乗り場呼びボタンを押下した後に、エレベータかごの到着を待ちきれず別の手段で避難してしまう場合に、エレベータの無駄な運行をすることなく、エレベータを利用して避難する在館者の避難時間を短縮するエレベータシステムおよびその制御方法が提供される。 According to the present invention, when a resident of a building where a fire has occurred presses a landing call button, if the elevator car cannot wait for the arrival of the elevator car and evacuates by another means, the elevator operates wastefully. An elevator system and a control method therefor are provided that reduce the evacuation time of residents who evacuate using an elevator.
以下、適宜、図面を参照しながら本発明の一例としての実施形態の説明を行う。 Hereinafter, an exemplary embodiment of the present invention will be described as appropriate with reference to the drawings.
(第1の実施形態)
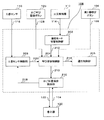
本発明の第1の実施形態を図1ないし図6を用いて説明する。図1は、本発明の第1の実施形態によるエレベータシステムの機能構成全体を表す図である。尚、この図は、本実施形態に関連する機能要素と、それらの関連を示すものであって、構成要素の物理的配置あるいは物理的構成を表すものではない。図1に示すように、エレベータシステムには、エレベータの乗り場の乗り場ドア102a、102bおよび102cと、それぞれの乗り場ドアの近傍に、エレベータを呼び出すための乗り場呼びボタン104a、104bおよび104cが備えられている。乗り場呼びボタン104a、104bおよび104cは、乗り場呼び信号伝送チャネル108を介して、エレベータの運転を制御する制御部106に接続されている。制御部106は、乗り場呼びボタン104a、104bまたは104cが押下された乗り場を検出し、検出した乗り場に、エレベータのかご110を走行させるように制御する。また、制御部106には、火災検知信号伝送チャネル114を介して、エレベータシステムが設置された建物の適切な場所に設けられ、火災の発生を検出する火災検知器112が接続されている。制御部106は、火災検知器112からの火災発生信号を受け取った場合には、エレベータを平常運転から避難運転に切り替える。さらに、エレベータの各乗り場には、かご110への搭乗を待っている人(以下、本明細書において「乗客」ということがある。)の存否を検出する人感センサ116を設けられている。人感センサには、反射型光センサ、反射型超音波センサ、焦電型赤外線センサ等の種類があるが、焦電型赤外センサは遠赤外光(熱)を感知するセンサであるため、本発明が実施される火災時に人間を正しく感知するためには、困難が伴うであろう。人感センサ116は、人感センサデータ伝送チャネル118を介して、制御部106に接続され、乗り場呼びボタンが押下された乗り場でかごへの搭乗を待っている人の存否信号を制御部106に伝達する。エレベータの機械室には、かご110を走行させる巻上機120が設けられている。巻上機120は、巻上機制御信号チャネル122を介して、制御部106によってその動作を制御される。また、巻上機120は、かご位置データ伝送チャネル124を介して、巻上機120によって検出したかご位置データを制御部106に伝達する。かご110には、かご行き先階指定ボタン(かご呼びボタン)126が設けられている。かご行き先階指定ボタン126は、かご行き先階指定信号伝送チャネル128を介して、制御部106と接続されている。制御部106はかご行き先階指定ボタン126が押下されたかご呼び登録に該当する乗り場を検出し、エレベータのかご110をかご行き先階指定ボタン126が押下されたかご呼び登録に応答するように制御する。
(First embodiment)
A first embodiment of the present invention will be described with reference to FIGS. FIG. 1 is a diagram illustrating the entire functional configuration of an elevator system according to a first embodiment of the present invention. This diagram shows the functional elements related to the present embodiment and their relations, and does not show the physical arrangement or physical configuration of the constituent elements. As shown in FIG. 1, the elevator system is provided with
図2に、本発明の第1の実施形態における制御部106を説明するための機能ブロック図を示す。尚、図2には制御部106の機能を説明するために、既に図1に示した機能構成要素も示しているが、これらの機能構成要素については、図2において同一の参照符号を付しており、説明は省略する。制御部106は、通常、マイクロコンピュータ、ROM、RAMまたは磁気記憶装置等のハードウェア資源と、エレベータ制御に必要なソフトウェアを含む、いわゆる組み込みシステムによって実装される。制御部106は、また、ハードウェアによって実装することもできる。
FIG. 2 is a functional block diagram for explaining the
第1の実施形態において、制御部106は、運転モード切替制御部202と、呼び登録制御部204と、運行制御部206と、人感センサ制御部208と、かご位置検出制御部210とを備える。運転モード切替制御部202には、火災検知信号伝送チャネル114を介して、火災検知器112が接続され、運転モード切替制御部202は、火災検知器112から火災発生信号を受信すると、かご110の運転モードを平常運転モードから避難運転モードに切り替える。また、運転モード切替制御部202には、運転切替信号伝送チャネル212を介して、呼び登録制御部204が接続されている。呼び登録制御部204は、運転モード切替制御部202から運転モード切替信号が入力されると、エレベータの呼び登録制御を平常運転時の呼び登録制御から、避難運転時の呼び登録制御に切り替える。呼び登録制御部204には、乗り場呼び信号伝送チャネル108を介して乗り場呼びボタン104が、かご行き先階指定信号伝送チャネル128を介してかご行き先階指定ボタン126とが、それぞれ接続されている。
In the first embodiment, the
呼び登録制御部204がエレベータの呼び登録制御を平常運転時の呼び登録制御から避難運転時の呼び登録制御に切り替えると、呼び登録制御部204は以下の処理を実行する。呼び登録制御部204は、平常運転時に登録され、かご110を呼び出すための乗り場呼び登録であって、避難階と逆方向に走行する乗り場呼び登録を取り消す。ここで、当業者に知られているように、避難階は、いわゆる安全階であり、火災管制運転の際の呼び戻し階を指す。通常、避難階からは建物の外に出ることができ、1階は避難階である場合が多い。例えば、1階が避難階であり、10階からの乗り場呼び登録であって、10階から上の階へ行く乗り場呼び登録は取り消される。また、呼び登録制御部204は、避難運転時の呼び登録制御に切り替えた後には、避難階と逆方向に走行する新たな乗り場呼びの登録を禁止する。また、呼び登録制御部204は、平常運転時にかご行き先階指定ボタン126を介して登録された、かご呼び登録をすべて取り消す。呼び登録制御部204は、さらに、かご呼び登録のかご行き先を避難階に設定する。すなわち、避難階と同方向に走行する新たな乗り場呼びに対応する行き先として避難階を登録する。
When the call
呼び登録制御部204には、呼び信号伝送チャネル214を介して、運行制御部206が接続されている。呼び登録制御部204に登録された避難階の呼び登録信号と乗り場呼び登録信号が運行制御部206に伝達されると、運行制御部206は巻上機120によってエレベータを呼びが登録された乗り場へ走行させる。また、呼び登録制御部204には、呼び登録信号伝送チャネル216を介して、かご位置検出制御部210が接続されている。呼び登録制御部204は、避難階の呼び登録信号と乗り場呼び登録信号を、かご位置検出制御部210にも伝達する。
An
かご位置検出制御部210には、かご位置データ伝送チャネル124を介して、巻上機120が接続されている。また、かご位置検出制御部210には、出力信号伝送チャネル218を介して、人感センサ制御部208が接続されている。巻上機120から乗りかご位置検出制御部210には、エレベータのかご110の位置データが伝達される。かご位置検出制御部210は、エレベータのかご110の走行速度、エレベータのかご110の位置、および呼び登録制御部204から伝達された乗り場呼び登録に対応する乗り場の位置に基づいて、乗り場呼びが登録された目的階に着床する減速タイミングから遡った所定の時間(例えば、3〜5秒)に対応する所定の昇降距離範囲(以後、単に「所定の昇降距離範囲」ということがある)を算出する。ここで、所定の時間は予め定めることができる。また、かご位置検出制御部210は、かご110の位置データに基づいて、算出した所定の昇降距離範囲にかご110が入っているか否かを判断する。かご位置検出制御部210は、所定の昇降距離範囲にかご110が入っていると判断すると、出力信号伝送チャネル218を介して、所定の昇降距離範囲にかご110が入った旨を、人感センサ制御部208に伝達する。
A hoisting
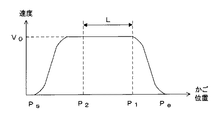
ここで、乗り場呼びが登録された目的階に着床する減速タイミングから遡った所定の時間に対応する所定の昇降距離範囲について図を用いて説明する。図3に「所定の昇降距離範囲」を説明するための図を示す。図には、かご110が出発点Psから、到着点である乗り場呼びが登録された目的階の位置Peまで走行するときの速度パターンが示されている。かご110は、Psから出発すると加速され、定常走行速度V0に達する。かご110が到着点Peに近づくと、減速タイミングに対応する位置、すなわち減速開始位置P1で減速を開始し、到着点Peで停止する。減速タイミングから遡った所定の時間(例えば、3〜5秒)に対応する位置P2と、減速開始位置P1との間が、所定の昇降距離範囲である。尚、定常走行速度V0は、エレベータの定格速度であるか、定格速度未満である。所定の昇降距離範囲は定常走行速度V0の値によって異なる。
Here, a predetermined lift distance range corresponding to a predetermined time that goes back from the deceleration timing when the landing call is registered on the destination floor will be described with reference to the drawings. FIG. 3 is a diagram for explaining the “predetermined lift distance range”. FIG,
図2に戻り、人感センサ制御部208は、人感センサ116とは人感センサデータ伝送チャネル118を介して、呼び登録制御部204とは乗客存否データ伝送チャネル220を介して、それぞれ接続されている。人感センサ制御部208にかご位置検出制御部210から、乗り場呼びが登録された目的階に着床する減速タイミングから遡った所定の時間に対応する所定の昇降距離範囲にかご110が入ったことが検出された信号が入力されると、人感センサ制御部208は、所定の昇降距離範囲が算出され、乗り場呼びが登録された目的階のみの人感センサ116を起動する。人感センサ116から人感センサ制御部208には、乗り場呼びが登録された目的階に乗客が居るか否かを表し、人感センサ116による検知結果である乗客存否データが、人感センサデータ伝送チャネル118を介して、伝達される。人感センサ制御部208は、受信した乗客存否データを呼び登録制御部204に、乗客存否データ伝送チャネル220を介して、伝達する。
Returning to FIG. 2, the human
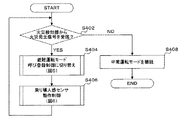
次に、フローチャートを参照しながら、本発明の第1の実施形態における動作説明を行う。図4に本発明の第1の実施形態における処理手順全体のフローチャートを示す。先ず、ステップS402で、火災検知器112から火災発生信号が受信されたか否かが判断される。火災検知器112から火災発生信号が受信された場合は、ステップS404で、エレベータの呼び登録制御を、平常呼び登録制御から避難運転モード呼び登録制御に切り替える。次いでステップS406で、乗り場人感センサ動作制御を行う。次に、ステップS402に戻り、火災検知器112から火災発生信号が受信されているか否かが判断される。火災検知器112から火災発生信号が受信されている場合は、再びステップS404に戻り、エレベータの呼び登録制御を避難運転モード呼び登録制御に切り替える。火災検知器112から火災発生信号が受信されていない場合には、ステップS408に進み、平常運転モードを継続する。
Next, the operation of the first embodiment of the present invention will be described with reference to the flowchart. FIG. 4 shows a flowchart of the entire processing procedure in the first embodiment of the present invention. First, in step S402, it is determined whether or not a fire occurrence signal has been received from the
図5に本発明の第1の実施形態における避難運転モード呼び登録制御のフローチャートを示す。図5に示すフローチャートは、図4に示したフローチャートのステップS404における処理手順を詳細に示したものである。運転モード切替制御部202は、火災検知器112から火災発生信号を受信すると、ステップS502で、エレベータの運転制御を平常運転モードから避難運転モードに切り替える。次にステップS504で、呼び登録制御部204は、既登録のすべてのかご呼び登録を取り消す。また、ステップS506で、新たな、かご呼び登録を無効にし、かご呼び登録のかご行き先を避難階に設定する。すなわち、避難階と同方向に走行する新たな乗り場呼びがあったときには、その乗り場呼びがあった階から、かごが走行する行き先を避難階に登録する。
FIG. 5 shows a flowchart of the evacuation operation mode call registration control in the first embodiment of the present invention. The flowchart shown in FIG. 5 shows the processing procedure in step S404 of the flowchart shown in FIG. 4 in detail. When receiving a fire occurrence signal from the
次にステップS508で、呼び登録制御部204は、既登録の乗り場呼び登録の有無を判断する。既登録の乗り場呼び登録がないと判断された場合は、ステップS512で、避難階と逆方向への新たな乗り場呼び登録を禁止した後、ステップS518で、エレベータかご110を避難階へ走行させ、ドアを閉めた状態で待機させる。次いでステップS508に戻り、乗り場呼び登録の有無を判断する。
In step S508, the call
ステップS508において、既登録の乗り場呼び登録があると判断された場合には、ステップS510で、既登録の乗り場呼び登録の走行方向と避難階への走行方向が一致するか否かを判断する。既登録の乗り場呼び登録の走行方向と避難階への走行方向が一致すると判断されたときには、乗り場人感センサ動作制御に進む。乗り場人感センサ動作制御の動作については、後ほど説明を行う。既登録の乗り場呼び登録の走行方向と避難階への走行方向が一致しないと判断されたときには、S514に進み、避難階と逆方向の乗り場呼び登録を取り消す。次にS516で、避難階と逆方向の新たな乗り場呼びの登録を禁止した後、乗り場人感センサ動作制御に進む。 If it is determined in step S508 that there is a registered landing call registration, it is determined in step S510 whether the traveling direction of the registered landing call registration matches the traveling direction to the evacuation floor. When it is determined that the travel direction of the registered landing call registration matches the travel direction to the evacuation floor, the process proceeds to landing human sensor operation control. The operation of the platform human sensor operation control will be described later. If it is determined that the travel direction of the registered landing call registration and the travel direction to the evacuation floor do not match, the process proceeds to S514, and the landing call registration in the direction opposite to the evacuation floor is canceled. Next, in step S516, registration of a new hall call in the direction opposite to the evacuation floor is prohibited, and then the process proceeds to hall presence sensor operation control.
図6に本発明の第1の実施形態における乗り場人感センサ動作制御のフローチャートを示す。図6に示すフローチャートは、図4に示したフローチャートのステップS406における処理手順を詳細に示したものである。ステップS602で、かご位置検出制御部210は、呼び登録制御部204から、乗り場呼びが登録された目的階位置データ、すなわち行き先階の位置データを読み出す。次にステップS604で、乗り場位置データとエレベータの走行速度に基づいて、乗り場呼びが登録された目的階に着床するための減速タイミングを算出する。次いでS606で、かご位置検出制御部210は、かごの現在位置、目的階の位置およびエレベータの走行速度に基づいて、乗り場呼びが登録された目的階に着床する減速タイミングから遡った所定の時間(例えば、3〜5秒)に対応する所定の昇降距離範囲を算出する。ここで、所定の時間は予め定めることができる。次にステップS608で、乗り場呼びに応答し、かごの走行を開始させる。次いでステップS610で、かご位置検出制御部210は、かご110の位置データに基づいて、かごがS606で算出された所定の昇降距離範囲に入っているか否かを判断する。ステップS608で、かごが所定の昇降距離範囲に入ってないと判断された場合は、ステップS508に戻り、乗り場呼び登録があるか否かが判断される。
FIG. 6 shows a flowchart of the hall human sensor operation control in the first embodiment of the present invention. The flowchart shown in FIG. 6 shows the processing procedure in step S406 of the flowchart shown in FIG. 4 in detail. In step S602, the car position
ステップS610で、かご110が所定の昇降距離範囲に入っていると判断された場合には、ステップS612で、人感センサ制御部208は、着床するために減速タイミングが算出された乗り場のみの人感センサ116を起動させ、その乗り場の乗客の存否を特定する。次に、着床するために減速タイミングを算出した乗り場のみの起動された人感センサ116の出力に基づき、ステップS614で、当該乗り場で乗客が検出されたか否かを判断する。乗り場で乗客が検出されたと判断された場合は、かごはそのまま走行し、ステップS616で呼び登録がされた乗り場に着床し、ステップS618で戸開して戸閉を行い、図4のステップS402に戻る。ここで、人感センサ制御部208は、ステップS616またはステップ618の段階で、人感センサ116の動作を停止する。人感センサ制御部208は、かご位置検出制御部210によって、かごが減速タイミングに対応する位置に達したと判断された段階で、人感センサ116の動作を停止してもよい。ステップS614において、当該乗り場で乗客が検出されていないと判断された場合には、ステップS620で乗り場の呼び登録を取り消し、人感センサ116の動作を停止し、図4のステップS402に戻る。
If it is determined in step S610 that the
以上説明したように、本実施形態によれば、避難運転時に利用客が乗り場呼びボタンを押したが、エレベータの到着を待ちきれず別の手段で避難してしまう等の場合に、エレベータに無駄な運行をさせずに、エレベータを利用して避難する他の利用客の避難時間を短縮させることができる。また、人感センサを特定の時間でしか動作させないため、常に動作させる場合に比べ、いわゆる摩耗故障が少なくなるとともに、消費エネルギを削減することができる。 As described above, according to the present embodiment, the user presses the landing call button during the evacuation operation, but when the passenger cannot wait for the arrival of the elevator and evacuates by another means, the elevator is wasted. The evacuation time of other passengers who evacuate using the elevator can be shortened without having to operate smoothly. Further, since the human sensor is operated only for a specific time, so-called wear failure is reduced and energy consumption can be reduced as compared with a case where the human sensor is always operated.
(実施形態2)
次に、本発明の第2の実施形態について、適宜、図面を参照しながら説明する。図7に本発明の第1の実施形態によるエレベータシステムの機能構成全体を表す図を示す。尚、この図も、本実施形態に関連する機能要素と、それらの関連を示すものであって、構成要素の物理的配置あるいは物理的構成を表すものではない。また、図7には既に図1に示した機能構成要素も示しているが、これらの機能構成要素については図7において同一の参照符号を付しており、説明を省略する。図7に示すように、第2の実施形態の機能構成は、ほぼ第1の実施形態の機能構成と同一であるが、エレベータの乗り場毎に乗り場アナウンス装置702a、702bおよび702cが付加されている。これらの乗り場アナウンス装置702a、702bおよび702cはアナウンスデータ伝送チャネル704を介して、制御部706と接続されている。制御部706は、第1の実施形態における制御部106の機能に加え、乗り場アナウンス装置702a、702bまたは702cに音声データを伝達する機能を実行する。
(Embodiment 2)
Next, a second embodiment of the present invention will be described with reference to the drawings as appropriate. FIG. 7 is a diagram showing the entire functional configuration of the elevator system according to the first embodiment of the present invention. This diagram also shows functional elements related to the present embodiment and their relations, and does not represent the physical arrangement or physical configuration of the constituent elements. FIG. 7 also shows the functional components already shown in FIG. 1, but these functional components are given the same reference numerals in FIG. As shown in FIG. 7, the functional configuration of the second embodiment is substantially the same as the functional configuration of the first embodiment, but landing
図8に、本発明の第2の実施形態における制御部706を説明するための機能ブロック図を示す。尚、図8には、制御部706の機能を説明するために、既に図1および図2に示した機能構成要素も示しているが、これらの機能構成要素については、図8において同一の参照符号を付しており、説明を省略する。図8に示すように、制御部706は、第1の実施形態における制御部106に含まれる構成要素の他に、乗り場アナウンス制御部802とアナウンスデータ記憶部804を備える。制御部706は、通常、マイクロコンピュータ、ROM、RAMまたは磁気記憶装置等のハードウェア資源と、エレベータ制御に必要なソフトウェアを含む、いわゆる組み込みシステムによって実装される。制御部706は、また、ハードウェアによって実装することもできる。
FIG. 8 is a functional block diagram for explaining the
乗り場アナウンス制御部802とアナウンスデータ記憶部804は、アナウンスデータ伝送チャネル806を介して接続されている。乗り場アナウンス制御部802は、乗り場位置を特定する乗り場位置データが呼び登録制御部210から伝達されると、アナウンスデータ伝送チャネル806を介して、アナウンスデータ記憶部804からアナウンスデータを読み出す。また、乗り場アナウンス制御部802は、それぞれ、かご位置データ伝送チャネル810およびアナウンスデータ伝送チャネル704を介して、かご位置検出制御部210および乗り場アナウンス装置702と接続されている。
The landing
かご位置検出制御部210から、かご位置データ伝送チャネル810を介して、乗り場アナウンス制御部802に、乗り場呼びが登録された目的階に着床する減速タイミングから遡った所定の時間に対応する昇降距離範囲に入った旨の信号が伝達されると、乗り場アナウンス制御部802は、アナウンスデータ伝送チャネル704を介して、乗り場呼びが登録された目的階の乗り場アナウンス装置702を起動し、アナウンスデータを当該乗り場アナウンス装置702に伝達する。アナウンスデータには、エレベータかご110が着床する乗り場で、かごへの搭乗を待っている人に対して、人感センサ116が検出できる範囲内に移動する旨の音声メッセージ情報が含まれる。アナウンスデータを受け取った乗り場アナウンス装置702は、アナウンスデータに対応する音声メッセージをエレベータかご110が着床する乗り場に流す。
Elevation distance corresponding to a predetermined time from the car position
さらなる実施形態において、アナウンスデータには、人感センサ116が乗客を検出した場合にアナウンスする内容である、乗客を検出した旨の音声メッセージ情報が含まれる。アナウンスデータを受け取った乗り場アナウンス装置702は、アナウンスデータに対応する音声メッセージをエレベータかご110が着床する乗り場に流す。
In a further embodiment, the announcement data includes voice message information indicating that a passenger has been detected, which is the content to be announced when the
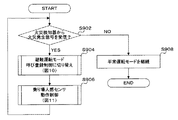
次に、フローチャートを参照しながら、本発明の第2の実施形態における動作説明を行う。図9に本発明の第2の実施形態における処理手順全体のフローチャートを示す。このフローチャートは、形式的には図4に示した第1の実施形態における処理手順全体のフローチャートと同一であり、S902およびS908に関しては、それぞれ、図4に示したS402およびS408と内容的にも同一であるため、説明を省略する。 Next, the operation of the second embodiment of the present invention will be described with reference to the flowchart. FIG. 9 shows a flowchart of the entire processing procedure in the second embodiment of the present invention. This flowchart is formally the same as the flowchart of the entire processing procedure in the first embodiment shown in FIG. 4, and S902 and S908 are also the same as S402 and S408 shown in FIG. 4, respectively. Since it is the same, description is abbreviate | omitted.
図10に、図9においてS904として示した第2の実施形態における避難運転モード呼び登録制御のフローチャートを示す。S1002ないしS1018における処理動作は、実質的に、図5に示したS502ないしS518における処理動作と同一であるため、説明を省略する。 FIG. 10 shows a flowchart of the evacuation operation mode call registration control in the second embodiment shown as S904 in FIG. The processing operations in S1002 to S1018 are substantially the same as the processing operations in S502 to S518 shown in FIG.
図9のS906における処理手順の内容は第1の実施形態における処理手順と異なるため、図を参照しながら説明を行う。図11に本発明の第2の実施形態における乗り場人感センサ動作制御のフローチャートを示す。S1102ないしS1108までの処理手順は第1の実施形態におけるS602ないしS608までの処理手順と同一である。 Since the content of the processing procedure in S906 in FIG. 9 is different from the processing procedure in the first embodiment, description will be given with reference to the drawing. FIG. 11 shows a flowchart of the platform human sensor operation control in the second embodiment of the present invention. The processing procedure from S1102 to S1108 is the same as the processing procedure from S602 to S608 in the first embodiment.
ステップS1110で、かご位置検出制御部210は、かご110の位置データに基づいて、かごがS1106で算出された所定の昇降距離範囲に入っているか否かを判断する。ステップS1110で、かご110が所定の昇降距離範囲に入っていると判断された場合には、ステップS1112で、乗り場アナウンス制御部802は、エレベータかご110が着床するために減速タイミングを算出した乗り場のみの乗り場アナウンス装置702を起動する。次にステップS1114で、乗り場アナウンス制御部802は、アナウンスデータ記憶部804からアナウンスデータを読み出す。アナウンスデータには、当該乗り場で、かごへの搭乗を待っている人を人感センサ116の感知エリアへの移動を指示する音声データが含まれる。また、乗り場アナウンス制御部802は、読み出したアナウンスデータを乗り場アナウンス装置702に伝達し、乗り場アナウンス装置702からアナウンスデータに対応する音声アナウンスを当該乗り場に流す。次いでステップS1116で、当該乗り場の人感センサ116を起動し、その乗り場の乗客の存否を特定する。次に、当該乗り場の人感センサ116の出力に基づき、ステップS1118で、当該乗り場で乗客が検出されたか否かを判断する。ステップS1118において乗り場で乗客が検出されたと判断された場合は、ステップS1120で、乗り場アナウンス装置702による音声アナウンスおよび人感センサ116の動作を停止する。次いでステップS1122で乗り場に着床すると、ステップS1124で戸開閉を行い、図9のステップS902に戻る。ここで、人感センサ制御部208は、ステップS1122、またはステップ1124、または、かご位置検出制御部210によって、かごが減速タイミングに対応する位置に達したと判断された段階で、人感センサ116の動作を停止してもよい。
In step S1110, the car position
ステップS1118において、当該乗り場で乗客が検出されていないと判断された場合には、S1126に進み、かご位置検出制御部210は、かご110の位置データに基づいて、かご110が所定の昇降距離範囲に入っているか否かを判断する。ステップS1126で、かご110が所定の昇降距離範囲に入っていると判断された場合には、ステップS1128で音声アナウンスおよび人感センサ116の動作を停止する。次いでステップS1130で乗り場の呼び登録を取り消し、図9のステップS902に戻る。ステップS1126で、かご110が所定の昇降距離範囲に入っていないと判断された場合には、人感センサ116の動作を停止した後、ステップS1114に戻り、継続的に乗り場に対して音声アナウンスを流す。
If it is determined in step S1118 that no passenger has been detected at the landing, the process proceeds to S1126, and the car position
ステップS1110において、かご110が所定の昇降距離範囲に入っていないと判断された場合には、図10のステップS1108に戻り、乗り場呼び登録があるか否かが判断される。
If it is determined in step S1110 that the
さらなる実施形態において、アナウンスデータには、人感センサ116が乗客を検出した場合にアナウンスする内容である、乗客を検出した旨の音声情報を含めることができる。この場合、ステップS1118では、乗り場アナウンス装置702による音声アナウンスを停止させずに、音声アナウンスの内容を、例えば、「センサが皆様を検知しました。暫く、そのままの場所でお待ち下さい。」という内容に切り替えることもできる。通常、乗客は人感センサの感知エリアを正確には知らないため、上記のような乗客を検出した旨のアナウンスを流すことによって、かごへの搭乗を待っている人を安心させることができる。
In a further embodiment, the announcement data may include voice information indicating that a passenger has been detected, which is the content to be announced when the
以上説明したように、本実施形態によれば、第1の実施形態の効果を得られると同時に、乗り場へ音声アナウンスを流すことによって、乗り場で、かごへの搭乗を待っている人に対して注意を喚起し、極力人感センサ116の感知エリア内に、かごへの搭乗を待っている人を誘導することができる効果がある。さらに、本実施形態によれば、乗り場アナウンス装置で案内を流すことによって、目が不自由な人に対しても、人感センサ116の感知エリアに入る旨の案内を伝達できる効果がある。
As described above, according to this embodiment, the effect of the first embodiment can be obtained, and at the same time, a voice announcement is sent to the landing area, so that the person waiting for boarding the car at the landing area can be obtained. There is an effect that a person who is waiting for boarding in the car can be guided within the sensing area of the
(第3の実施形態)
次に、本発明の第3の実施形態について、適宜、図面を参照しながら説明する。図12に、本発明の第3の実施形態によるエレベータシステムの機能構成全体を表す図を示す。尚、この図も、本実施形態に関連する機能要素と、それらの関連を示すものであって、構成要素の物理的配置あるいは物理的構成を表すものではない。また、図12には既に図1に示した機能構成要素も示しているが、これらの機能構成要素については、図12において同一の参照符号を付しており、説明を省略する。図12に示すように、第3の実施形態の機能構成は、ほぼ第1の実施形態の機能構成と同一であるが、エレベータの乗り場毎に乗り場表示装置1202a、1202bおよび1202cが付加されている。これらの乗り場表示装置1202a、1202bおよび1202cは、表示データ伝送チャネル1204を介して、制御部1206と接続されている。制御部1206は、第1の実施形態における制御部106の機能に加え、乗り場表示装置1202a、1202bまたは1202cに表示データを伝達する機能を実行する。
(Third embodiment)
Next, a third embodiment of the present invention will be described with reference to the drawings as appropriate. In FIG. 12, the figure showing the whole function structure of the elevator system by the 3rd Embodiment of this invention is shown. This diagram also shows functional elements related to the present embodiment and their relations, and does not represent the physical arrangement or physical configuration of the constituent elements. 12 also shows the functional components already shown in FIG. 1, but these functional components are denoted by the same reference numerals in FIG. 12, and description thereof is omitted. As shown in FIG. 12, the functional configuration of the third embodiment is almost the same as the functional configuration of the first embodiment, but landing
図13に、本発明の第3の実施形態における制御部1206を説明するための機能ブロック図を示す。尚、図13には制御部1206の機能を説明するために、既に図1および図2に示した機能構成要素も示しているが、これらの機能構成要素については、図13において同一の参照符号を付しており、説明を省略する。図13に示すように、制御部1206は、第1の実施形態における制御部106に含まれる構成要素の他に、乗り場表示制御部1302と表示データ記憶部1304を備える。制御部1206は、通常、マイクロコンピュータ、ROM、RAMまたは磁気記憶装置等のハードウェア資源と、エレベータ制御に必要なソフトウェアを含む、いわゆる組み込みシステムによって実装される。制御部1206は、また、ハードウェアによって実装することもできる。
FIG. 13 is a functional block diagram for explaining the
乗り場表示制御部1302と表示データ記憶部1304は、案内表示データ伝送チャネル1306を介して接続されている。乗り場表示制御部1302は、乗り場位置を特定する乗り場位置データが呼び登録制御部210から伝達されると、表示データ記憶部1304から、案内表示データ伝送チャネル1306を介して、表示データを読み出す。
The hall
また、乗り場表示制御部1302は、かご位置データ伝送チャネル1310および表示データ伝送チャネル1204を介して、それぞれ、かご位置検出制御部210および乗り場表示装置1202と接続されている。かご位置検出制御部210から、かご位置データ伝送チャネル1310を介して、乗り場表示制御部1302に、乗り場呼びが登録された目的階に着床する減速タイミングから遡った所定の時間に対応する昇降距離範囲に入った旨の信号が伝達されると、乗り場表示制御部1302は、表示データ伝送チャネル1204を介して、乗り場呼びが登録された目的階の乗り場表示装置1202を起動し、案内表示データを当該乗り場表示装置1202に伝達する。案内表示データには、エレベータかご110が着床する乗り場で、かごへの搭乗を待っている人に対して、人感センサ116が検出できる範囲内に移動を指示する視覚情報が含まれる。
The landing
さらなる実施形態において、表示データには、人感センサ116が乗客を検出した場合に表示する内容である、乗客を検出した旨の視覚情報が含まれる。
In a further embodiment, the display data includes visual information indicating that a passenger has been detected, which is the content to be displayed when the
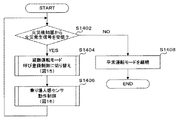
次に、フローチャートを参照しながら、本発明の第3の実施形態における動作説明を行う。図14に本発明の第3の実施形態における処理手順全体のフローチャートを示す。このフローチャートは、形式的には図4に示した第1の実施形態における処理手順全体のフローチャートと同一であり、S1402およびS1408に関しては、それぞれ、図4に示したS402およびS408と内容的にも同一であるため、説明を省略する。 Next, the operation of the third embodiment of the present invention will be described with reference to the flowchart. FIG. 14 shows a flowchart of the entire processing procedure in the third embodiment of the present invention. This flowchart is formally the same as the flowchart of the entire processing procedure in the first embodiment shown in FIG. 4, and the contents of S1402 and S1408 are the same as S402 and S408 shown in FIG. 4, respectively. Since it is the same, description is abbreviate | omitted.
図15に、図14においてS1404として示した第3の実施形態における避難運転モード呼び登録制御のフローチャートを示す。S1402ないしS1418における処理動作は、実質的に、図5に示したS502ないしS518における処理動作と同一であるため、説明を省略する。 FIG. 15 shows a flowchart of the evacuation operation mode call registration control in the third embodiment shown as S1404 in FIG. The processing operations in S1402 to S1418 are substantially the same as the processing operations in S502 to S518 shown in FIG.
図14のS1406における処理手順の内容は第1の実施形態および第2の実施形態における処理手順のいずれとも異なるため、図を参照しながら説明を行う。図16に本発明の第3の実施形態における乗り場人感センサ動作制御のフローチャートを示す。S1602ないしS1608までの処理手順は第1の実施形態におけるS602ないしS608までの処理手順と同一である。 The contents of the processing procedure in S1406 of FIG. 14 are different from both of the processing procedures in the first embodiment and the second embodiment, and will be described with reference to the drawings. FIG. 16 shows a flowchart of the platform human sensor operation control in the third embodiment of the present invention. The processing procedure from S1602 to S1608 is the same as the processing procedure from S602 to S608 in the first embodiment.
ステップS1610で、かご位置検出制御部210は、かご110の位置データに基づいて、かごがS1606で算出された所定の昇降距離範囲に入っているか否かを判断する。ステップS1610で、かご110が所定の昇降距離範囲に入っていると判断された場合には、ステップS1612で、乗り場表示制御部1302は、エレベータかご110が着床するために減速タイミングを算出した乗り場のみの乗り場表示装置1202を起動する。次にステップS1614で、乗り場表示制御部1302は、表示データ記憶部1304から案内表示データを読み出す。案内表示データには、当該乗り場で、かごへの搭乗を待っている人を人感センサ116の感知エリアへの移動を指示する視覚データが含まれる。また、乗り場表示制御部1302は、読み出した表示データを乗り場表示装置1202に伝達し、乗り場表示装置1202は、表示データに対応する案内表示を当該乗り場に出力する。次いでステップS1616で、当該乗り場の人感センサ116を起動し、その乗り場の乗客の存否を特定する。次に、当該乗り場の人感センサ116の出力に基づき、ステップS1618で、当該乗り場で乗客が検出されたか否かを判断する。ステップS1618において乗り場で乗客が検出されたと判断された場合は、ステップS1620で、乗り場表示装置1202による案内表示出力、および人感センサ116の動作を停止する。次いでステップS1622で乗り場に着床すると、ステップS1624で戸開閉を行い、図14のステップS1402に戻る。ここで、人感センサ制御部208は、ステップS1622、またはステップ1624、またはかご位置検出制御部210によって、かごが減速タイミングに対応する位置に達したと判断された段階で、人感センサ116の動作を停止してもよい。
In step S1610, the car position
ステップS1618において、当該乗り場で乗客が検出されていないと判断された場合には、S1626に進み、かご位置検出制御部210は、かご110の位置データに基づいて、かご110が所定の昇降距離範囲に入っているか否かを判断する。ステップS1626で、かご110が所定の昇降距離範囲に入っていると判断された場合には、ステップS1628で案内表示出力、および人感センサ116の動作を停止する。次いでステップS1630で乗り場の呼び登録を取り消し、図14のステップS1402に戻る。ステップS1626で、かご110が所定の昇降距離範囲に入っていないと判断された場合には、人感センサ116の動作を停止した後、ステップS1614に戻り、継続的に乗り場に対して案内表示を出力する。
If it is determined in step S <b> 1618 that no passenger has been detected at the landing, the process proceeds to S <b> 1626, and the car position
ステップS1610において、かご110が所定の昇降距離範囲に入っていないと判断された場合には、図15のステップS1508に戻る。
If it is determined in step S1610 that the
さらなる実施形態において、表示データには、人感センサ116が乗客を検出した場合に表示する内容である、乗客を検出した旨の視覚情報を含めることができる。この場合、ステップS1618では、乗り場表示装置1202による表示を停止させずに、表示の内容を、例えば、「センサが皆様を検知しました。暫く、そのままの場所でお待ち下さい。」という内容に切り替えることもできる。通常、かごへの搭乗を待っている人は人感センサの感知エリアを正確には知らないため、上記のような乗客を検出した旨の表示を流すことによって、かごへの搭乗を待っている人を安心させることができる。
In a further embodiment, the display data may include visual information indicating that the passenger has been detected, which is the content displayed when the
以上説明したように、本実施形態によれば、第1の実施形態の効果を得られると同時に、乗り場へ案内表示を出力することによって、乗り場で、かごへの搭乗を待っている人に対して注意を喚起し、極力人感センサ116の感知エリア内にかごへの搭乗を待っている人を誘導することができる効果がある。さらに、本実施形態によれば、乗り場の表示装置に案内表示を出力することによって、耳が不自由な人に対しても、人感センサ116の感知エリアに入る旨の案内を伝達できる効果がある。
As described above, according to the present embodiment, the effect of the first embodiment can be obtained, and at the same time, by outputting a guidance display to the landing, it is possible for a person waiting for boarding the car at the landing. This has the effect of drawing attention and guiding a person waiting for boarding the car within the sensing area of the
また、第2の実施形態と第3の実施形態を併用することによって、目または耳のいずれか一方が不自由な人に対しても、人感センサ116の感知エリアに入る旨の案内を伝達できる効果がある。
Further, by using the second embodiment and the third embodiment in combination, a guidance to enter the sensing area of the
尚、本発明は上記の実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で開示した構成要素を変形して具体化できる。また、上記の実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示した全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態にわたる構成要素を適宜組み合わせてもよい。 Note that the present invention is not limited to the above-described embodiments as they are, and can be embodied by modifying the disclosed components without departing from the scope of the invention in the implementation stage. Moreover, various inventions can be formed by appropriately combining a plurality of constituent elements disclosed in the above embodiments. For example, some components may be deleted from all the components shown in the embodiment. Furthermore, constituent elements over different embodiments may be appropriately combined.
102・・・乗り場ドア、 104・・・乗り場呼びボタン、
106、706、1206・・・制御部、 110・・・かご、
112・・・火災検知器、 116・・・人感センサ、 120・・・巻上機、
126・・・かご行き先階指定ボタン、 202・・・運転モード切替制御部、
204・・・呼び登録制御部、 206・・・運行制御部、
208・・・人感センサ制御部、 210・・・かご位置検出制御部、
702a、702b、702c・・・乗り場アナウンス装置、
802・・・乗り場アナウンス制御部、 804・・・アナウンスデータ記憶部、
1202・・・乗り場表示装置、 1302・・・乗り場表示制御部、
1304・・・表示データ記憶部
102: landing door 104: landing call button,
106, 706, 1206 ... control unit, 110 ... car,
112 ... Fire detector, 116 ... Human sensor, 120 ... Hoisting machine,
126 ... Car destination floor designation button, 202 ... Operation mode switching control unit,
204 ... call registration control unit, 206 ... operation control unit,
208 ... human sensor control unit, 210 ... car position detection control unit,
702a, 702b, 702c ... landing announcement device,
802: A landing announcement control unit, 804 ... Announcement data storage unit,
1202 ... Landing display device, 1302 ... Landing display control unit,
1304: Display data storage unit
Claims (10)
前記エレベータの着床階の乗り場のそれぞれに設けられ、前記かごを呼び出すための乗り場呼びボタンと、
前記エレベータのかごの位置を検出するかご位置検出手段と、
前記エレベータの着床階の乗り場のそれぞれに設けられ、その乗り場に居る人の存否を検出する人感センサと、
前記昇降手段を制御する機能と、前記乗り場呼びボタンから受信する信号に基づいて乗り場呼び登録を行う機能と、前記かご位置検出手段から受信する前記かごの位置データと前記乗り場呼び登録された乗り場の位置に基づいて前記乗り場呼び登録された乗り場に着床する減速タイミングから遡った所定の時間に対応する所定の昇降距離範囲を算出する機能と、前記人感センサから受信する信号に基づいて当該人感センサが設けられた乗り場に人が居るか否かを判断する機能と、前記建物に設けられた火災検知手段から火災発生信号を受信したときに前記エレベータを平常運転から避難運転に切り替える機能とを有する制御手段とを備え、
避難運転時において、前記制御手段は、前記建物の避難階への走行方向と一致する走行方向の乗り場呼び登録が存在し、かつ、前記エレベータのかごが前記所定の昇降範囲に入ったことを前記かご位置検出手段から受信した場合にのみ、前記一致する走行方向の乗り場呼び登録に対応する乗り場に設けられた人感センサを起動し、この人感センサから受信する信号に基づいて人が居ないと判断したときには前記一致する走行方向の乗り場呼び登録を取り消すことを特徴とするエレベータシステム。 Elevating means for running an elevator car installed in the building;
A landing call button provided at each landing floor of the elevator, for calling the car;
Car position detecting means for detecting the position of the elevator car;
A human sensor that is provided at each landing floor of the elevator and detects the presence or absence of a person at the landing,
A function for controlling the lifting means, a function for registering a landing call based on a signal received from the landing call button, a position data of the car received from the car position detecting means, and a landing call registered A function of calculating a predetermined lift distance range corresponding to a predetermined time retroactive from the deceleration timing of landing on the landing call registered based on the position, and a signal received from the human sensor A function for determining whether or not there is a person at a landing provided with a feeling sensor, and a function for switching the elevator from normal operation to evacuation operation when a fire occurrence signal is received from a fire detection means provided in the building; Control means having
During the evacuation operation, the control means confirms that there is a landing call registration in a traveling direction that coincides with the traveling direction to the evacuation floor of the building, and that the elevator car has entered the predetermined lift range. Only when it is received from the car position detecting means, the human sensor provided at the landing corresponding to the landing call registration in the corresponding traveling direction is activated, and there is no person based on the signal received from this human sensor. The elevator system is characterized in that when it is determined that the landing call registration in the corresponding traveling direction is cancelled.
前記制御手段は、前記人感センサが起動中に、この人感センサが設けられている乗り場に、前記エレベータのかごへの搭乗を待っている人を前記人感センサの感知エリアに誘導する音声アナウンスを前記乗り場アナウンス手段によって放送することを特徴とする請求項1に記載のエレベータシステム。 The elevator system further comprises landing announcement means provided at each landing floor landing of the elevator,
The control means is a voice for guiding a person waiting for boarding of the elevator car to a sensing area of the human sensor at a hall where the human sensor is provided while the human sensor is activated. The elevator system according to claim 1, wherein the announcement is broadcast by the landing announcement means.
前記制御手段は、前記人感センサが起動中に、この人感センサが設けられている乗り場に、前記エレベータのかごへの搭乗を待っている人を前記人感センサの感知エリアに誘導するメッセージを前記乗り場表示手段によって表示することを特徴とする請求項1に記載のエレベータシステム。 The elevator system further comprises landing display means provided at each landing floor of the elevator,
The control means is a message for guiding a person waiting for boarding of the elevator car to the sensing area of the human sensor at the hall where the human sensor is provided while the human sensor is activated. The elevator system according to claim 1, wherein the display is displayed by the hall display means.
避難運転時において、
前記建物の避難階への走行方向と一致する走行方向の乗り場呼び登録が存在し、かつ、前記エレベータのかごが前記所定の昇降範囲に入ったことを前記かご位置検出手段から前記制御部に受信された場合にのみ、前記一致する走行方向の乗り場呼び登録に対応する乗り場に設けられた人感センサを起動するステップと、
起動された前記人感センサから受信する信号に基づいて人が居ないと前記制御部によって判断されたときに前記一致する走行方向の乗り場呼び登録を取り消すステップと
を含むこと特徴とするエレベータシステムを制御する方法。 Elevator for traveling an elevator car installed in a building, a landing call button for calling the car provided at each landing floor of the elevator, and a car position for detecting the position of the elevator car Based on a signal received from the landing call button that is provided at each of the detection unit and the landing floor of the elevator, detects the presence of a person at the landing, and controls the lifting device. A predetermined number of days after the deceleration timing to land at the landing call registration location based on the position data of the car received from the car position detection unit and the location of the landing call registration location A predetermined lift distance range corresponding to the time is calculated, and the human sensor is provided based on a signal received from the human sensor. A control unit having a function of determining whether or not there is a person at the landing and switching the elevator from normal operation to evacuation operation when a fire occurrence signal is received from a fire detection means provided in the building. A method for controlling an elevator system, comprising:
During evacuation operation,
The control section receives from the car position detection means that there is a landing call registration in the traveling direction that coincides with the traveling direction to the evacuation floor of the building and that the elevator car has entered the predetermined lift range. A human sensor provided at the landing corresponding to the landing call registration in the corresponding traveling direction only when
An elevator system comprising: a step of canceling the matching call registration in the traveling direction when the control unit determines that no person is present based on a signal received from the activated human sensor. How to control.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009299169A JP5550334B2 (en) | 2009-12-29 | 2009-12-29 | Elevator system and control method thereof |
| CN201010615570.3A CN102107804B (en) | 2009-12-29 | 2010-12-20 | Elevator system and control method thereof |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009299169A JP5550334B2 (en) | 2009-12-29 | 2009-12-29 | Elevator system and control method thereof |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011136824A true JP2011136824A (en) | 2011-07-14 |
| JP5550334B2 JP5550334B2 (en) | 2014-07-16 |
Family
ID=44172104
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009299169A Expired - Fee Related JP5550334B2 (en) | 2009-12-29 | 2009-12-29 | Elevator system and control method thereof |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP5550334B2 (en) |
| CN (1) | CN102107804B (en) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102774715A (en) * | 2012-07-22 | 2012-11-14 | 宁波市镇海怡福莱文化创意有限公司 | Elevator wait detecting method |
| JP2022096914A (en) * | 2020-12-18 | 2022-06-30 | 東芝エレベータ株式会社 | Elevator control device |
| CN117088205A (en) * | 2022-05-12 | 2023-11-21 | 香港华艺设计顾问(深圳)有限公司 | A super high-rise energy-saving elevator system embedded with humanized dispatch mode |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106715311B (en) * | 2014-09-24 | 2018-11-30 | 三菱电机株式会社 | Elevator device |
| CN109890734B (en) * | 2016-11-02 | 2021-07-20 | 三菱电机株式会社 | elevator system |
| EP3556703B1 (en) | 2018-04-19 | 2022-06-01 | Otis Elevator Company | E-call registration for elevator |
| CN110950205B (en) * | 2019-12-10 | 2022-03-29 | 北京云迹科技股份有限公司 | Elevator running state judgment method and device |
| CN112079214B (en) * | 2020-09-01 | 2022-09-06 | 日立楼宇技术(广州)有限公司 | Elevator waiting management system and control method thereof |
| CN113743211B (en) * | 2021-08-02 | 2023-10-31 | 日立楼宇技术(广州)有限公司 | Staircase video monitoring system, method, device and storage medium |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS521840A (en) * | 1975-06-23 | 1977-01-08 | Hitachi Ltd | Elevator control system |
| JP2006256723A (en) * | 2005-03-15 | 2006-09-28 | Toshiba Elevator Co Ltd | Elevator device |
| JP2007091379A (en) * | 2005-09-27 | 2007-04-12 | Mitsubishi Electric Corp | Elevator control device and elevator operation method |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6413387A (en) * | 1987-07-08 | 1989-01-18 | Toshiba Corp | Driving device at time of fire of group control elevator |
| JP2000044136A (en) * | 1998-07-23 | 2000-02-15 | Otis Elevator Co | Elevator |
| US7669695B2 (en) * | 2005-09-05 | 2010-03-02 | Mitsubishi Denki Kabushiki Kaisha | Fire evacuation operation system for group controlled elevators |
| US8091687B2 (en) * | 2006-10-25 | 2012-01-10 | Mitsubishi Electric Corporation | Elevator system |
| JP2008195468A (en) * | 2007-02-09 | 2008-08-28 | Toshiba Corp | Elevator system and elevator control method |
-
2009
- 2009-12-29 JP JP2009299169A patent/JP5550334B2/en not_active Expired - Fee Related
-
2010
- 2010-12-20 CN CN201010615570.3A patent/CN102107804B/en not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS521840A (en) * | 1975-06-23 | 1977-01-08 | Hitachi Ltd | Elevator control system |
| JP2006256723A (en) * | 2005-03-15 | 2006-09-28 | Toshiba Elevator Co Ltd | Elevator device |
| JP2007091379A (en) * | 2005-09-27 | 2007-04-12 | Mitsubishi Electric Corp | Elevator control device and elevator operation method |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102774715A (en) * | 2012-07-22 | 2012-11-14 | 宁波市镇海怡福莱文化创意有限公司 | Elevator wait detecting method |
| JP2022096914A (en) * | 2020-12-18 | 2022-06-30 | 東芝エレベータ株式会社 | Elevator control device |
| JP7135061B2 (en) | 2020-12-18 | 2022-09-12 | 東芝エレベータ株式会社 | elevator controller |
| CN117088205A (en) * | 2022-05-12 | 2023-11-21 | 香港华艺设计顾问(深圳)有限公司 | A super high-rise energy-saving elevator system embedded with humanized dispatch mode |
Also Published As
| Publication number | Publication date |
|---|---|
| CN102107804B (en) | 2014-01-22 |
| CN102107804A (en) | 2011-06-29 |
| JP5550334B2 (en) | 2014-07-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5550334B2 (en) | Elevator system and control method thereof | |
| US11097924B2 (en) | Hand detection for elevator operation | |
| JP5788265B2 (en) | Elevator system and its hall call registration control method | |
| US8958910B2 (en) | Elevator system that autonomous mobile robot takes together with person | |
| JP2013154978A (en) | Elevator system and method for informing inside of elevator car of elevator hall information upon occurrence of disaster | |
| JP7478690B2 (en) | Elevator | |
| CN111032552A (en) | Elevator system with mobile robot | |
| JP2015044674A (en) | Elevator guide system | |
| EP1930279B1 (en) | Elevator controller and method of operating elevator | |
| JP2009292566A (en) | Landing car call automatic registration system | |
| JP5804958B2 (en) | Elevator with priority rescue function | |
| JP2008184301A (en) | Elevator control system | |
| JP6141101B2 (en) | Elevator control device and elevator control method | |
| JP2011068426A (en) | Group supervisory operation elevator | |
| JP6089909B2 (en) | Wheelchair elevator | |
| JP2007084238A (en) | Elevator | |
| JP2012197126A (en) | Call registering device for elevator | |
| CN109132740B (en) | Elevator device and control method thereof | |
| JP5955517B2 (en) | Elevator system, elevator operation control device, and elevator operation control method | |
| JP5084371B2 (en) | Elevator system | |
| JP2013023370A (en) | Elevator system | |
| WO2019064371A1 (en) | Landing destination floor input device for elevators, elevator control system, and elevator system | |
| JP2004224472A (en) | Operation controller of elevator | |
| CN102190226A (en) | Disaster evacuation system | |
| JP4799024B2 (en) | elevator |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120510 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130812 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130827 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131025 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140422 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140520 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5550334 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |