JP2010060407A - Apparatus and method for recognizing button - Google Patents
Apparatus and method for recognizing button Download PDFInfo
- Publication number
- JP2010060407A JP2010060407A JP2008225671A JP2008225671A JP2010060407A JP 2010060407 A JP2010060407 A JP 2010060407A JP 2008225671 A JP2008225671 A JP 2008225671A JP 2008225671 A JP2008225671 A JP 2008225671A JP 2010060407 A JP2010060407 A JP 2010060407A
- Authority
- JP
- Japan
- Prior art keywords
- button
- irradiation
- light
- normal vector
- light source
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images










Landscapes
- Image Processing (AREA)
- Image Analysis (AREA)
- Investigating Materials By The Use Of Optical Means Adapted For Particular Applications (AREA)
- Sewing Machines And Sewing (AREA)
Abstract
Description
本発明は、ボタンの種類および表裏を認識するボタンの認識装置およびボタン認識方法に関する。 The present invention relates to a button recognition device and a button recognition method for recognizing the type and front / back of a button.
従来より、自動ボタン縫い付け装置によってボタンを縫製物に縫い付けるにあたり、ボタンの表裏を判別するボタン認識装置が用いられている。 2. Description of the Related Art Conventionally, when a button is sewn to a sewing product by an automatic button sewing device, a button recognition device that distinguishes the front and back of the button has been used.
例えば、特許文献1には、ボタンの表裏を検知するためのボタン検知装置を備えた自動ボタン縫着装置が記載されている。このボタン検知装置は、ボタンつまみ足が上昇する際に、このボタンつまみ足によって保持されたボタンの上面に係合可能な位置に進退自在に配置され、ボタンの上面における縁部と中央部に係合可能なボタン検知手段と、このボタン検知手段の上下変位によってボタンの表裏を判別する判別手段とを有している。
For example,
この自動ボタン検知装置は、例えば、ボタン検知手段として、ボタン有無検知レバーおよびボタン表裏検知レバーを備えている。このような自動ボタン検知装置は、ボタン供給アームによってボタンつまみ足にボタンが供給された後、ボタンつまみ足が上昇する際に、ボタンの縁部によってボタン有無検知レバーが押し上げられたか否かにより、ボタンつまみ足におけるボタンの有無を検知するようになっている。また、自動ボタン検知装置は、ボタンの表面における中央部が窪んでいるのに対し、裏面における中央部は平面状であるというボタンの形状を利用して、ボタンつまみ足が上昇する際に、ボタンの中央部によってボタン表裏検知レバーが押し上げられたか否かにより、ボタンの表裏を判別するようになっている。 The automatic button detection device includes, for example, a button presence / absence detection lever and a button front / back detection lever as button detection means. Such an automatic button detection device is based on whether or not the button presence / absence detection lever is pushed up by the edge of the button when the button knob foot is raised after the button is supplied to the button knob foot by the button supply arm. The presence or absence of a button on the button knob foot is detected. In addition, the automatic button detection device uses a button shape in which the central part on the front surface of the button is recessed while the central part on the back surface is flat. The front and back of the button is discriminated based on whether or not the button front / back detection lever is pushed up by the center of the button.
また、特許文献2には、ボタン収納部および移動経路に所定の振動を発生させることにより、ボタン収納部に収納されたボタンを、ボタンの表裏選別後にボタン排出口から順次排出するボタン供給部を備えたボタン供給装置が記載されており、このボタン供給装置は、移動経路の途中においてボタン選別機構を備えている。そして、ボタン供給装置においては、ボタンの表面における中央部が窪んでおり裏面の中央部が平面状であるというボタン形状を利用して、ボタンは、ボタン選別機構を通過する際に、平面状の裏面が下側を向いており、表面が上側に向いているときには、ボタン選別機構を通過するようになっている。一方、ボタンは、中央部に窪みのある表面が下側を向き、裏面が上側に向いているときには、ボタン選別機構からボタン収納部における下方に落下するようになっている。これにより、ボタン供給装置は、ボタンの表裏を判別し、表面が上側を向いているボタンのみをボタン排出口から順次排出するようになっている。
さらに、特許文献3に記載されたボタン供給装置は、ボタンの糸通し孔に係止される係止ピンが形成され、ボタンをミシンの縫製部に供給するボタン搬送部と、係止ピン上に載置されたボタンの上面からボタンを回転させながら係止ピン上に押し当てる回転装置とを備えている。このようなボタン供給装置は、回転装置によってボタンを回転させながら係止ピン上に押し当ててボタンの糸通し孔に係止ピンを係止させることにより、ボタンを平面上における所定の角度回動して、ミシンに供給するようになっている。
Furthermore, the button supply device described in
さらにまた、特許文献4には、文字、図形、記号等、衣服への縫着時に方向性がある模様が施されているボタンの上面を撮像して前方画像を取得する撮像手段を備えたボタンの縫着方向設定装置が記載されている。このボタンの縫着方向設定装置は、撮像手段により取得された前方画像と、ボタンについて予め記録された基準画像とに基づいて、ボタンの上面の模様が所定の方向に向くようにボタンを回転させて、ミシンに供給するようになっている。 Furthermore, Patent Document 4 discloses a button provided with an imaging means for capturing a front image by capturing an image of the upper surface of a button on which a pattern having directionality such as characters, figures, symbols, and the like is sewn on clothes. The sewing direction setting device is described. The button sewing direction setting device rotates the button so that the pattern on the upper surface of the button is directed in a predetermined direction based on the front image acquired by the imaging unit and the reference image recorded in advance for the button. To supply to the sewing machine.
しかし、前述の特許文献1に記載の自動ボタン検知装置および特許文献2に記載のボタン供給装置によれば、ボタンの表裏の判別を、ボタンの表面における中央部が窪み、裏面が平面状であるというボタン形状を利用して行うため、例えば、表裏とも同じような形状であるが、表面にのみ彫刻が施されているような表裏に微妙な相違があるだけのボタンについては、表裏の判別ができないという問題を有していた。
However, according to the automatic button detection device described in
また、特許文献3に記載のボタン供給装置によれば、糸通し孔の形成位置の精度が悪いボタンがボタン搬送部上に載置された場合、係止ピンが糸通し孔に係止されないまま回転装置によってボタンが係止ピン上に押し当てられてしまい、係止ピンが折れてしまうおそれがあるという問題を有していた。
Further, according to the button supply device described in
さらに、特許文献4に記載のボタンの縫着方向設定装置によれば、ボタンの表面に形成された刻印や画像等によっても、ボタンの表裏を判別することが可能であるが、例えば、ボタンが光を反射する材料によって形成されている場合、ボタンの色彩や模様によっては、取得した前方画像において背景画像とボタン画像とを区別することが困難なことがあった。さらにまた、前述のボタンの縫着方向設定装置によれば、ボタンが透明または半透明の材料によって構成されている場合には、撮像手段によってボタンについて予め記録された基準画像と比較するために十分な前方画像を取得することができない場合があった。このため、このボタンの縫着方向設定装置は、例えば反射性の材料や透明、半透明の材料によって形成されているような多種多様なボタンの判別に対応することができないという問題を有していた。さらに、特許文献4に記載のボタンの縫着方向設定装置では、ボタンの表面に刻印や画像が形成されておらず、しかもボタンの表裏の形状に微妙な相違しか有していないボタンについては、特許文献1および2に記載のボタン供給装置と同様に表裏の判別ができないという問題があった。
Further, according to the button sewing direction setting device described in Patent Document 4, it is possible to determine the front and back of the button by using a stamp, an image, or the like formed on the surface of the button. When formed of a material that reflects light, it may be difficult to distinguish the background image from the button image in the acquired front image depending on the color and pattern of the button. Furthermore, according to the button sewing direction setting device described above, when the button is made of a transparent or translucent material, it is sufficient to compare the button with a reference image recorded in advance for the button. In some cases, a forward image could not be acquired. For this reason, this button sewing direction setting device has a problem that it cannot cope with the discrimination of a wide variety of buttons, for example, formed of a reflective material or a transparent or translucent material. It was. Furthermore, in the button sewing direction setting device described in Patent Document 4, for a button that has no markings or images formed on the surface of the button and has only a subtle difference in the shape of the front and back of the button, Similar to the button supply device described in
本発明はこれらの点に鑑みてなされたものであり、ボタンの表裏および種類の判別精度の向上を図ることができるとともに、ミシンによって縫製物にボタンを仕上がりよく縫い付けることが可能なボタン認識装置およびボタン認識方法を提供することを目的とする。 The present invention has been made in view of these points, and is capable of improving the accuracy of discriminating the front and back of the button and the type thereof, and capable of sewing the button on the sewing product with a finished finish with a sewing machine. And a button recognition method.
前記目的を達成するため、請求項1に記載の発明に係るボタン認識装置の特徴は、ボタンの前面に対してそれぞれ異なる方向から照射光が照射されるように配置された複数の光源と、前記各光源からの照射光が照射された状態における前記ボタンの前面を撮像する撮像装置と、前記各光源からの照射光の照射および前記撮像装置の撮像のタイミングを制御し、前記撮像装置による撮像によって前記各光源による異なる方向からの照射光毎の前記ボタンの撮像画像を取得し、前記各撮像画像に基づいて撮像対象となっているボタンの面法線ベクトルを算出し、前記撮像対象ボタンの前面における予め算出された基準面法線ベクトルと比較して、前記撮像対象ボタンの種類および表裏を判別する制御装置とを備えた点にある。
In order to achieve the object, the button recognition device according to
この請求項1に記載の発明によれば、複数の光源による異なる方向からの照射光の照射によって取得された各撮像画像を用いて、各撮像画像の全画素毎の面法線ベクトルを求めることができ、これにより、ボタンの3次元形状を求めることができる。このため、ボタンの表裏の面形状やボタンの種類による形状の差が微妙な場合であっても、ボタンの表裏や撮像対象となっているボタンが所望のボタンと同一の種類か否かを判別することができる。 According to the first aspect of the present invention, the surface normal vector for every pixel of each captured image is obtained using each captured image acquired by irradiation of irradiation light from different directions by a plurality of light sources. Thus, the three-dimensional shape of the button can be obtained. Therefore, even if the shape difference between the front and back surfaces of the button and the type of button is subtle, it is determined whether the button front and back and the button being imaged are the same type as the desired button. can do.
請求項2に記載の発明に係るボタン認識装置の特徴は、請求項1に記載のボタン認識装置において、前記制御装置は、前記ボタンの前面における全体または外周縁における少なくとも一部分の前記面法線ベクトルを算出する点にある。 According to a second aspect of the present invention, there is provided the button recognition device according to the first aspect, wherein the control device is configured to have the surface normal vector of the entire front surface or at least a part of the outer periphery of the button. It is in the point which calculates.
この請求項2に記載の発明によれば、制御装置は、ボタンの前面における全体について面法線ベクトルを算出することにより、ボタンの表裏および種類の判別精度をより向上させることができる。一方、制御装置は、ボタンの前面における外周縁の少なくとも一部分について面法線ベクトルを算出することにより、面法線ベクトルを算出する面積を小さくすることができる。このため、制御装置は、ボタンの表裏および種類の判別精度を向上させることができるとともに、算出時間の短時間化を図ることができ、より効率的にボタンの表裏および種類を判別することができる。 According to the second aspect of the present invention, the control device can further improve the discrimination accuracy of the front and back of the button and the type by calculating the surface normal vector for the entire front surface of the button. On the other hand, the control device can reduce the area for calculating the surface normal vector by calculating the surface normal vector for at least a part of the outer periphery of the front surface of the button. For this reason, the control device can improve the discrimination accuracy of the front and back of the button and the type, can shorten the calculation time, and can discriminate the front and back and the type of the button more efficiently. .
請求項3に記載の発明に係るボタン認識装置の特徴は、請求項1または請求項2に記載のボタン認識装置において、前記制御装置は、前記各光源から順番に前記ボタンに照射光を照射し、前記撮像装置によって、前記各照射方向からの照射光の照射毎に前記ボタンの前面を撮像して、前記各照射方向からの照射光毎の前記撮像画像を取得する点にある。 According to a third aspect of the present invention, in the button recognition device according to the first or second aspect, the control device irradiates the button with irradiation light in order from each light source. The imaging device captures the front surface of the button for each irradiation of irradiation light from each irradiation direction, and acquires the captured image for each irradiation light from each irradiation direction.
この請求項3に記載の発明によれば、各光源によって順番にボタンに照射光を照射して、カメラによって各光源による照射光の照射毎に撮像するので、制御装置は、各照射方向からの照射光毎の撮像画像を容易に取得することができ、これにより、判別工程の短時間化を図ることができ、より効率的にボタンの表裏および種類を判別することができる。 According to the third aspect of the present invention, the light is emitted to the button in turn by each light source, and an image is picked up for each irradiation of the light by each light source by the camera. A captured image for each irradiation light can be easily acquired, whereby the time required for the determination process can be shortened, and the front and back and the type of the button can be determined more efficiently.
請求項4に記載の発明に係るボタン認識装置の特徴は、請求項1または請求項2に記載のボタン認識装置において、前記各光源として、それぞれ異なる色彩の照射光を照射する光源を用い、前記制御装置は、前記各光源から前記ボタンに同時に照射光を照射した状態において前記撮像装置によって前記ボタンを撮像し、前記撮像画像から前記各色彩の成分を抽出して前記各光源による照射光毎の前記撮像画像を取得する点にある。 The button recognition device according to a fourth aspect of the present invention is characterized in that, in the button recognition device according to the first or second aspect, a light source that emits irradiation light of a different color is used as each of the light sources. The control device images the button by the imaging device in a state in which the button is simultaneously irradiated with light from the light sources, extracts the components of the colors from the captured image, and outputs the components for each light emitted from the light sources. The captured image is acquired.
この請求項4に記載の発明によれば、制御装置は、各光源によって同時にボタンに照射光を照射した状態によってボタンの上面を撮像するので、ボタンの認識のための時間を短縮することができ、より効率的にボタンの表裏および種類を判別することができる。 According to the fourth aspect of the present invention, since the control device images the upper surface of the button according to the state in which the light is irradiated on the button simultaneously by each light source, the time for recognizing the button can be shortened. , The front and back of the button and the type can be discriminated more efficiently.
請求項5に記載の発明に係るボタン認識方法の特徴は、ボタンの前面に対して複数の照射方向から照射光を照射し、前記各照射方向からの照射光の照射毎に、前記ボタンの前面を撮像し、前記各照射方向からの照射光毎の前記ボタンの撮像画像に基づいて、前記撮像対象となっているボタンの面法線ベクトルを算出し、前記撮像対象ボタンの前面における予め算出された基準面法線ベクトルと比較して、前記撮像対象ボタンの種類および表裏を判別する点にある。
A feature of the button recognition method according to the invention of
この請求項5に記載の発明によれば、複数の照射方向からの照射光の照射によって取得された各撮像画像を用いて、各撮像画像の全画素毎の面法線ベクトルを求めることができ、これにより、ボタンの3次元形状を求めることができる。このため、ボタンの表裏の曲面形状や異なるボタンの形状の差が小さい場合であっても、表裏や撮像対象となっているボタンが所望のボタンと同一の種類か否かを判別することができる。 According to the fifth aspect of the present invention, it is possible to obtain a surface normal vector for every pixel of each captured image using each captured image acquired by irradiation of irradiation light from a plurality of irradiation directions. Thereby, the three-dimensional shape of the button can be obtained. For this reason, it is possible to determine whether the front and back and the button to be imaged are the same type as the desired button even when the difference between the curved shape of the front and back of the button and the shape of different buttons is small. .
本発明に係るボタン認識装置およびボタン認識方法によれば、ボタンの表裏および種類の判別精度の向上を図ることができ、この結果、ミシンによって縫製物にボタンを仕上がりよく縫い付けることができる。 According to the button recognizing device and the button recognizing method of the present invention, it is possible to improve the accuracy of discriminating the front and back of the button and the type thereof, and as a result, the button can be sewn with good finish on the sewing product by the sewing machine.
以下、本発明に係るボタン認識装置の一実施形態を図1から図13を参照して説明する。 Hereinafter, an embodiment of a button recognition apparatus according to the present invention will be described with reference to FIGS.
図1は、本実施形態に係るボタン認識装置を備えたボタン供給装置およびミシンを示す概略斜視図である。 FIG. 1 is a schematic perspective view showing a button supply device and a sewing machine including a button recognition device according to the present embodiment.
図1に示すように、ボタン認識装置1はミシン2にボタンBを供給するボタン供給装置3に備えられている。
As shown in FIG. 1, the
ボタン供給装置3は、円筒状の第1ボタン供給部5を有し、第1ボタン供給部5の内壁面には、第1ボタン供給部5の底面から上縁の一部に形成された第1排出口5aまでボタンBを搬送する螺旋状の通路5bが形成されている。そして、第1ボタン供給部5は、底面部に収納されたボタンBを、所定の微振動によって通路5bに沿って上昇させて第1排出口5aまで搬送し、第1排出口5aから下方に落下させるようになっている。
The
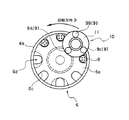
第1ボタン供給部5における第1排出口5aの下方には、円盤状の第2ボタン供給部6が配設されており、第2ボタン供給部6は、円盤状の回転板6aと、回転板6aにおける底面の周縁部および側面を被覆して回転板6aを収納する支持体6bとを備えている。回転板6aにおける周縁部には、少なくとも3つ(本実施形態においては8つ)の切欠部6cが、円周方向に同一の間隔をもって形成されており、第2ボタン供給部6は、切欠部6cおよび支持体6bに囲まれて形成された凹状のボタン収容部6dによって、第1排出口5aから落下したボタンBを収容するようになっている。回転板6aは、支持体6bの内部においてモータ等の駆動手段によって周方向に間欠的に回転し、この回転板6aの回転により、各ボタン収容部6dに収容されたボタンBは、水平環状の搬送経路において搬送されるようになっている。
A disk-shaped second
支持体6bには、回転板6aの回動によってボタン収容部6dにおいて搬送されたボタンBを第2ボタン供給部6の下方に落下して排出するための図示しない第2排出口が形成されている。第2排出口は、回転板6aの間欠的な回動移動の間の停止時に切欠部6cに対向する位置であって、回転板6aの回転中心を挟んで支持体6bにおける第1排出口5aの下方と対向する位置に形成されている。
The
そして、第2ボタン供給部6は、1つのボタン収容部6dが第1排出口5aの下方に位置すると停止し、ボタン収容部6dにおいて第1排出口5aから落下したボタンBを収容した後に回転し、隣位するボタン収容部6dが第1排出口5aの下方に位置すると停止するようになっている。また、第2ボタン供給部6は、回転板6aの回動によって切欠部6cが第2排出口の上面に位置すると、第2排出口からボタンBを落下して排出するようになっている。
Then, the second
第2ボタン供給部6とミシン2との間であって第2排出口の近傍には、ボタン収容部6dに収容されたボタンBの平面形状における位置を修正して、ミシン2に供給するボタン位置修正装置7が配設されている。ボタン位置修正装置7は、ボタンBを搬送する搬送アーム7aを有しており、搬送アーム7aの先端部上面には、ボタンBに形成されたボタン孔に係止される係止ピン7bが突出して形成されている。搬送アーム7aは、図示しない駆動手段により先端部が第2排出口の下方とミシン2との間を往復移動するようになっており、先端部が第2排出口の下方に位置するときに、第2排出口から排出されたボタンBを先端部において受け取るようになっている。
A button that is provided between the second
第2排出口の上方には、図示しないモータおよびシリンダ等の駆動手段によって回転かつ昇降移動する位置修正部材7cが設けられており、位置修正部材7cは、搬送アーム7aの先端部にボタンBが落下すると、回転しながら下降して位置修正部材7cの下端部をボタンBの前面(上面)に圧接するようになっている。これにより、位置修正装置は、ボタンBを係止ピン7bの先端部で回転させてボタン孔を搬送アーム7aの係止ピン7bに係止するようになっている。
A
そして、搬送アーム7aは、ボタン孔を係止ピン7bに係止することにより先端部においてボタンBを保持し、この状態でボタンBをミシン2に搬送するようになっている。
The transport arm 7a holds the button B at the tip by locking the button hole to the
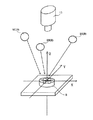
ボタン認識装置1は、図2に示すように、ボタンBの上面に照射光を照射する複数(本実施形態においては3つ)の光源9A、9B、9C(9)を備えた照明装置10を有している。照明装置10は、第2ボタン供給部6の上方におけるボタンBの搬送経路における第1排出口5aからのボタンBの収容位置と第2排出口からのボタンBの排出位置との間であって回転板6aの間欠的な回動移動の間の停止時に切欠部6cに対向する位置に配置されている。
As illustrated in FIG. 2, the
各光源9は、図2および図3に示すように、ボタンBの上面に対してそれぞれ異なる照射方向から照射光が照射されるように予め定められた位置に、ボタン収容部6dに対向して配置されており、各光源9は、環状の支持体11によって一体に保持されている。
As shown in FIGS. 2 and 3, each
照明装置10の上方には、ボタンBの上面を撮像する撮像手段としてのカメラ13が固定して配設されており、図4に示すように、カメラ13は、照明装置10における支持体11の開口部を介してボタンBの上面を撮像するようになっている。なお、カメラ13の配置位置は、各光源9の照射光がボタンBの上面において反射した反射光を撮像可能な位置であれば、照明装置10の上方でなくてもよい。
Above the
図5に示すように、ボタン認識装置1は、ボタン認識装置1の各部の動作を制御する制御装置15を有している。制御装置15は、CPU16を有しており、CPU16は、アナログ・デジタルコンバータ(A/Dコンバータ)17を介してカメラ13に接続されているとともに、カメラ制御部18を介してカメラ13に接続されている。また、制御装置15は、光源制御部20を介して各光源9に接続されている。さらに、制御装置15は、インターフェース(I/F)19を介してミシン2の制御部21とボタン供給装置3とに接続されているとともに、光源制御部20を介して各光源9に接続されている。制御装置15には、画像メモリ22、データベースメモリ23およびワークメモリ25が設けられそれぞれCPU16に接続されており、データベースメモリ23には、撮像対象となるボタンBの前面における撮像画像から予め算出されたボタンBの上面の基準面法線ベクトルが撮像画像の各画素毎に記憶されている。また、カメラ13によって撮像されたボタンBの撮像画像は、A/Dコンバータ17によりデジタル化された後、画像メモリ22において記憶されるようになっている。
As illustrated in FIG. 5, the
さらに、制御装置15は、画像処理プログラムが記憶された画像処理プログラムメモリ26を有しており、画像処理プログラムに基づいて、各光源9による照射方向からの照射毎の撮像画像を取得し、各撮像画像に基づいて、撮像対象となったボタンBの面法線ベクトルnを、算出するようになっている。例えば、図6に示すような面法線ベクトルnを基準にθ方向からの光源9によってボタンBの上面が照射されている場合に、光源9の強さL、光源ベクトルs、ボタンBの上面の反射率ρを用いて、面法線ベクトルnを算出する。そして、制御装置15は、算出された面法線ベクトルnと撮像対象となっているボタンBの基準面法線ベクトルと比較して、撮像対象となっているボタンBの種類および表裏を判別するようになっている。
Furthermore, the
次に、本実施形態に係るボタン認識装置1によるボタン認識方法について詳細に説明する。
Next, the button recognition method by the
第1ボタン供給部5の第1排出口5aから排出されたボタンBが、第2ボタン供給部6におけるボタン収容部6dに収容された後、回転板6aの回転により搬送されてボタン認識装置1における照明装置10およびカメラ13の下方において停止すると、ボタン認識装置1の制御装置15は、ボタンBの認識動作を開始する。
After the button B discharged from the
図7に示すように、まず、制御装置15は、各光源9のうち第1光源9Aを点灯してボタンBの上面に照射光を照射し(ST1)、カメラ13によって第1光源9Aによる照射光の照射によってボタンBの上面を撮像する(ST2)。続いて、制御装置15は、第1光源9Aを消灯し(ST3)、撮像した撮像画像を画像メモリ22に記憶する(ST4)。その後、制御装置15は、全光源9の照射光の照射による撮像が終了したか否かを判別し(ST5)、終了していないと判別した場合には(ST5においてNo)、残りの第2光源9Bを点灯して、ST1〜ST4を繰り返す。そして、制御装置15は、第1光源9Aから第3光源9Cまで、これらの各工程(ST1〜ST4)を繰り返して、ST5において全ての光源9を点灯したと判別した場合には(ST5においてYes)、撮像画像を画像メモリ22からワークメモリ25に転送して(ST6)、撮像画像の全画素について、面法線ベクトルを算出する(ST7)。
As shown in FIG. 7, first, the
面法線ベクトルの算出について、図8に示すように、まず制御装置15は、h=1として(ST71)、算出対象となる撮像画像の全画素のうちh画素目の面法線ベクトルを算出する(ST72)。
Regarding the calculation of the surface normal vector, as shown in FIG. 8, first, the
ここで、制御装置15におけるボタンBの上面の面法線ベクトルnの算出対象は、図9(a)に示すようにボタンBの前面全体でもよい。また、図9(b)に示すように、ボタンBの外周縁の一部分のみまたは前面全体を撮像して、ボタンBの外周縁における一部分を算出対象としてもよい。さらには、図9(c)に示すようにボタンBの前面全体を撮像し、ボタンBの外周縁全体のみを算出対象としてもよい。
Here, the calculation target of the surface normal vector n on the upper surface of the button B in the
図10に示すように、xyz座標において、カメラ13の受光素子であるCCDまたはCMOSによる撮像画像のそれぞれの画素の位置を(i,j)とすると、面法線ベクトルnは、数式1によって表される。
As shown in FIG. 10, when the position of each pixel of the image captured by the CCD or CMOS which is the light receiving element of the

また、各光源の位置は、予め定められているから、図10に示すように、光源9をk(k=1〜3)とし、光源ベクトルsの仰角をα、方位角をβとすると、仰角α、方位角βは、各光源kの配設位置により予め定められていて既知であるから、光源ベクトルsは、数式2によって表される。なお、光源ベクトルsは、長さ1の単位ベクトルである。
Further, since the position of each light source is determined in advance, as shown in FIG. 10, if the
ここで、光源ベクトルsは単位ベクトルであるから、 Here, since the light source vector s is a unit vector,
ak=cosαkcosβk
bk=cosαksinβk
ck=sinαk
として算出される。
a k = cos α k cos β k
b k = cos α k sin β k
c k = sin α k
Is calculated as
続いて、制御装置15は、算出対象の撮像画像の全画素数をmとしたとき、hがmより小さいか否かを判別し(ST73)、hがmより小さいと判別した場合には(ST73においてYes)、h=h+1として、再度h画素目の面法線ベクトルを算出して(ST72)、hがmより小さいか否かを判別する(ST73)。一方、制御装置15は、ST73においてhがmより小さくないと判別した場合には(ST73においてNo)、面法線ベクトルを算出する工程を終了する。このようにして、制御装置15は、撮像画像全体、前述の算出対象となるボタンBの前面全体、または外周縁の一部分、または外周縁の全体の全画素について面法線ベクトルを算出する。
Subsequently, the
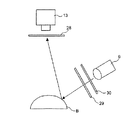
また、制御装置15において面法線ベクトルnを求める場合であって、例えば金属性のボタンB等、ボタンBの上面の材質、処理等によってボタンBの上面における照射光の拡散反射成分に対して鏡面成分(正反射)が無視できない場合には、予めボタンBの上面の反射率ρを取得して、データベースに記憶しておくとよい。また、図11に示すように、カメラ13のレンズに偏光フィルタ28を装着したり、または光源9の前面に偏光フィルタ29を装着することにより、カメラ13によって拡散反射成分のみを受光するようにしてもよい。これにより、制御装置15は、正確な面法線ベクトルnを算出することができる。
Further, in the case where the surface normal vector n is obtained in the
さらに、各光源9として、例えばLED等の指向特性があるような点光源9ではない光源9を用いる場合には、光源9の前面に拡散フィルタ30を装着することにより、指向特性を除去することができ、これにより、制御装置15は、正確な面法線ベクトルnを算出することができる。
Furthermore, when the
続いて、制御装置15は、面法線ベクトルの比較処理を行う(ST8)。面法線ベクトルの比較処理について、図12に示すように、制御装置15は、まずデータベースから撮像対象となっているボタンBの全画素の基準面法線ベクトルを取り出し、パターンマッチングにより、算出した撮像画像における全画素の面法線ベクトルnと比較して(ST81)、全画素の基準面法線ベクトルと算出された面法線ベクトルとの一致率を算出する(ST82)。
Subsequently, the
次に、制御装置15は、予め決定されたしきい値に基づいて、例えば、全画素の基準面法線ベクトルと算出された面法線ベクトルnとの一致率が80%より大きいか否かを判別する(ST9)。そして、制御装置15は、一致率が80%より大きいと判別した場合には(ST8においてYes)、ボタンBの表面が上方を向いていると判別し(ST10)、I/F19を介してその判別結果をミシン2の制御部21に出力するとともに、ボタン位置修正装置7の搬送アーム7aを駆動してボタンBをミシン2に搬送する(ST11)。次いで、ミシン2の制御部21は、搬送アーム7aによって搬送されたボタンBを用いてボタンBの縫いつけを行う。
Next, based on a predetermined threshold value, for example, the
一方、制御装置15は、ST8において一致率が80%より大きくないと判別した場合には(ST8においてNo)、ボタンBの裏面が上方を向いているまたはボタンBの種類が異なると判別し(ST12)、搬送アーム7aによって搬送されたボタンBを不図示の排除位置に搬送して排除する(ST13)。
On the other hand, if it is determined in ST8 that the coincidence rate is not greater than 80% (No in ST8), the
本実施形態によれば、複数の光源9A、9B、9Cによる照射方向からの照射によって取得された各撮像画像を用いて全画素毎の面法線ベクトルnを求めることができ、これにより、ボタンBの3次元形状を求めることができる。このため、ボタンBの表裏の曲面形状や異なるボタンBの形状の差が小さい場合であっても、表裏や撮像対象となっているボタンBが所望のボタンBと同一の種類か否かを判別することができる。
According to the present embodiment, it is possible to obtain the surface normal vector n for every pixel using each captured image acquired by irradiation from the irradiation direction by the plurality of
したがって、本実施形態のボタン認識装置1によれば、ボタンBの表裏および種類の判別精度の向上を図ることができ、この結果、ミシン2によって縫製物にボタンBを仕上がりよく縫い付けることができる。
Therefore, according to the
また、制御装置15は、ボタンBの前面における全体について面法線ベクトルnを算出することにより、ボタンBの表裏および種類の判別精度をより向上させることができる。さらに、制御装置15は、ボタンBの前面における外周縁の一部分または全部について面法線ベクトルnを算出することにより、面法線ベクトルnを算出する面積を小さくすることができる。このため、制御装置15は、ボタンBの表裏および種類の判別精度を向上させることができるとともに、算出時間の短時間化を図ることができ、より効率的にボタンBの表裏および種類を判別することができる。
In addition, the
さらには、各光源9によって順番にボタンBに照射光を照射して、カメラ13によって各光源9による照射光の照射毎に撮像するので、制御装置15は、各照射方向からの照射光毎の撮像画像を容易に取得することができ、これにより、判別工程の短時間化を図ることができ、より効率的にボタンBの表裏および種類を判別することができる。
Further, the
さらにまた、本実施形態によれば、固定したカメラ13によって各撮像画像を撮像するので、複数のカメラ13を用いて各照射方向からの照射毎の撮像画像を撮像する場合と比較して、撮像範囲の対応付けをする必要がなく、判別工程の短時間化を図ることができ、より効率的にボタンBの表裏および種類を判別することができる。
Furthermore, according to the present embodiment, each captured image is captured by the fixed
続いて、本発明の第2の実施形態について、図13を用いて説明する。 Subsequently, a second embodiment of the present invention will be described with reference to FIG.
図13は、第2の実施形態に係るボタン認識装置1の腰部を示す概略側面図である。ここで、第2の実施形態において、第1の実施形態と同一の構成については詳述を省略し、同一の符号を用いて説明する。
FIG. 13 is a schematic side view showing the waist of the
図13に示すように、第2の実施形態におけるボタン認識装置1は、ボタンBの上面に対して異なる照射方向から照射光を照射する位置に配置された4つ以上(第2の実施形態においては5つ)の光源9A、9B、9C、9D、9E(以下、符号9で総称する)を備えている。光源9の数は、ボタンBの上面の形状や表面特性等を考慮して決定する。
As illustrated in FIG. 13, the
次に、第2の実施形態に係るボタン認識装置1のボタンB認識方法について説明する。
Next, a button B recognition method of the
制御装置15は、各光源9による照射方向からの照射光の照射毎に、カメラ13によってボタンBの上面を撮像し、撮像した各撮像画面を画像メモリ22に記憶する。そして、制御装置15は、画像処理プログラムに基づき、撮像対象となっているボタンBの上面の面法線ベクトルnを算出する。
The
ここで、図13に示すように、カメラ13は、光源9B、9C、9DからボタンBの上面におけるある部分において反射した反射光については、光源9B、9C、9D、ボタンBの上面およびカメラ13の位置関係から、拡散反射成分のみを受光する。一方、カメラ13は、光源9AからボタンBの上面において反射した反射光については、光源9A、ボタンBの上面およびカメラ13の位置関係から、正反射成分のみを受光する。さらに、カメラ13は、光源9EからボタンBにおいて反射した反射光については、キャストシャドウが発生して受光することができない。
Here, as shown in FIG. 13, the
このとき、制御装置15は、正反射成分については、輝度の高さあるいは色彩により拡散成分と区別し、その光源9Aの撮像画像における該当する画素の反射光データを面法線ベクトルnの算出に用いない。また、制御装置15は、所定のしきい値に達しない輝度の部分(暗い部分)については、反射光が受光されない光源9Eとして、その光源9Eの撮像画像における該当する画素の反射光データを面法線ベクトルnの算出に用いない。しきい値は、ボタンBの上面の色彩等を考慮して設定する。
At this time, the
そこで、制御装置15は、該当する画素については光源9B、9C、9Dによる照射方向の照射毎の撮像画像を用いて、面法線ベクトルnを算出する。
Therefore, the
そして、制御装置15は、算出した面法線ベクトルnと基準面法線ベクトルと比較し、ボタンBの表面が上方を向いているか、またはボタンBの裏面が上方を向いているまたはボタンBの種類が異なるかを判別する。そして、制御装置15は、ボタンBの表面が上方を向いていると判別した場合には、インターフェース(I/F)19を介してボタン位置修正装置7の搬送アーム7aを駆動してボタンBをミシン2に搬送するとともに、判別結果をミシン2の制御部21に出力する。次いで、ミシン2の制御部21は、ボタンBの表面が上方を向いているという判別結果を入力した場合には、搬送アーム7aによって搬送されたボタンBを用いてボタンBの縫いつけを行う。
Then, the
一方、制御装置15は、ボタンBの裏面が上方を向いていると判別した場合には、搬送アーム7aによって搬送されたボタンBを不図示の排除位置に搬送して排除する。
On the other hand, when the
第2の実施形態によれば、制御装置15は、拡散反射光のみを用いて面法線ベクトルnを算出することができるので、予め反射率を取得することなく面法線ベクトルnを算出することができる。
According to the second embodiment, the
また、制御装置15は、所定のしきい値以上の輝度の反射光データを用いて面法線ベクトルnを算出することができるので、より正確な面法線ベクトルnを算出することが可能となる。
In addition, since the
したがって、第2の実施形態のボタン認識装置1によれば、ボタンBの表裏および種類の判別精度の向上を図ることができ、この結果、ミシン2によって縫製物にボタンBを仕上がりよく縫い付けることができる。
Therefore, according to the
なお、本発明は前記両実施形態に限定されるものではなく、必要に応じて種々変更することが可能である。 In addition, this invention is not limited to the said both embodiment, A various change is possible as needed.
例えば、第1の実施形態におけるボタン認識装置1は、第1ボタン供給部5、第2ボタン供給部6およびボタン位置修正装置7を備えたボタン供給装置3に設けられているが、これに限定されるものではない。
For example, the
また、前述の両実施形態においては、順番に各光源9による照射方向からの照射光の照射毎にボタンBの前面を撮像するものであるが、本発明はこれに限定されるものではない。例えば、各光源9として、R、G、B等それぞれ異なる色彩の照射光を照射する光源9を用い、制御装置15は、各光源9によって同時にボタンBに照射光を照射した状態によってボタンBの上面を撮像し、撮像画像から各色彩の成分を抽出して各光源9による照射方向毎の撮像画像を取得してもよい。これにより、ボタン認識装置1は、複数の光源9による照射方向からの照射によって取得された各撮像画像を用いて全画素毎の面法線ベクトルnを求めることができ、これにより、ボタンBの3次元形状を求めることができる。また、各光源9によって同時にボタンBを照射した状態でボタンBの上面を撮像するので、ボタンBの認識のための時間を短縮することができ、より効率的にボタンBの表裏および種類を判別することができる。
Moreover, in both above-mentioned embodiment, although the front surface of the button B is imaged in order for every irradiation of the irradiation light from the irradiation direction by each
さらに、前述の両実施形態においては、複数の光源9を用いて複数の照射方向からの照射光毎の撮像画像を得るようになっているが、本発明はこれに限定されず、予め複数の照射方向を決定し、各照射方向から照射光を照射するように1つの光源9を移動するようにしてもよい。
Furthermore, in both of the above-described embodiments, a plurality of
1 ボタン認識装置
B ボタン
9A、9B、9C 光源
10 照明装置
11 支持体
13 カメラ
15 制御装置
16 CPU
17 A/Dコンバータ
18 カメラ制御部
19 インターフェース
20 光源制御部
21 制御部
22 画像メモリ
23 データベースメモリ
25 ワークメモリ
26 画像処理プログラムメモリ
DESCRIPTION OF
17 A /
Claims (5)
前記各光源からの照射光が照射された状態における前記ボタンの前面を撮像する撮像装置と、
前記各光源からの照射光の照射および前記撮像装置の撮像のタイミングを制御し、前記撮像装置による撮像によって前記各光源による異なる方向からの照射光毎の前記ボタンの撮像画像を取得し、前記各撮像画像に基づいて撮像対象となっているボタンの面法線ベクトルを算出し、前記撮像対象ボタンの前面における予め算出された基準面法線ベクトルと比較して、前記撮像対象ボタンの種類および表裏を判別する制御装置と
を備えたことを特徴とするボタン認識装置。 A plurality of light sources arranged so that irradiation light is irradiated from different directions with respect to the front surface of the button,
An imaging device that images the front surface of the button in a state in which irradiation light from each of the light sources is irradiated;
Controls the irradiation timing of the irradiation light from each of the light sources and the imaging timing of the imaging device, obtains a captured image of the button for each irradiation light from different directions by the light sources by imaging by the imaging device, The surface normal vector of the button that is the imaging target is calculated based on the captured image, and compared with the reference surface normal vector that is calculated in advance on the front surface of the imaging target button. A button recognition device comprising: a control device for discriminating between.
前記制御装置は、前記各光源から前記ボタンに同時に照射光を照射した状態において前記撮像装置によって前記ボタンを撮像し、前記撮像画像から前記各色彩の成分を抽出して前記各光源による照射光毎の前記撮像画像を取得することを特徴とする請求項1または請求項2に記載のボタン認識装置。 As each of the light sources, a light source that emits irradiation light of a different color is used,
The control device picks up an image of the button by the image pickup device in a state in which the button is simultaneously irradiated with light from the light sources, extracts components of the colors from the picked-up image, and outputs each light emitted from the light sources. The button recognition apparatus according to claim 1, wherein the captured image is acquired.
前記各照射方向からの照射光の照射毎に、前記ボタンの前面を撮像し、
前記各照射方向からの照射光毎の前記ボタンの撮像画像に基づいて、前記撮像対象となっているボタンの面法線ベクトルを算出し、
前記撮像対象ボタンの前面における予め算出された基準面法線ベクトルと比較して、前記撮像対象ボタンの種類および表裏を判別することを特徴とするボタン認識方法。 Irradiate light from multiple irradiation directions to the front of the button,
For each irradiation of irradiation light from each irradiation direction, image the front of the button,
Based on the captured image of the button for each irradiation light from each irradiation direction, calculate the surface normal vector of the button to be imaged,
A button recognition method, wherein the type and front / back side of the imaging target button are discriminated by comparing with a reference surface normal vector calculated in advance on the front side of the imaging target button.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008225671A JP5149742B2 (en) | 2008-09-03 | 2008-09-03 | Button recognition device and button recognition method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008225671A JP5149742B2 (en) | 2008-09-03 | 2008-09-03 | Button recognition device and button recognition method |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010060407A true JP2010060407A (en) | 2010-03-18 |
| JP5149742B2 JP5149742B2 (en) | 2013-02-20 |
Family
ID=42187358
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008225671A Expired - Fee Related JP5149742B2 (en) | 2008-09-03 | 2008-09-03 | Button recognition device and button recognition method |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5149742B2 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012122870A (en) * | 2010-12-09 | 2012-06-28 | Juki Corp | Three-dimensional shape recognition apparatus |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61213753A (en) * | 1985-03-20 | 1986-09-22 | Agency Of Ind Science & Technol | System for detecting flaw on surface of object having regular reflection characteristic |
| JPS61277510A (en) * | 1985-05-31 | 1986-12-08 | Tokyo Juki Ind Co Ltd | Automatic button feeder |
| JPH0278937A (en) * | 1988-09-14 | 1990-03-19 | Omron Tateisi Electron Co | Display method for substrate inspection device |
| JPH0223197B2 (en) * | 1987-02-27 | 1990-05-23 | Juki Kk | |
| JPH0269703U (en) * | 1988-11-15 | 1990-05-28 | ||
| JPH03280166A (en) * | 1990-03-29 | 1991-12-11 | Anritsu Corp | Product inspection device |
| JPH0477598B2 (en) * | 1985-05-31 | 1992-12-08 | Juki Kk | |
| JPH09239169A (en) * | 1996-03-07 | 1997-09-16 | Kazumi Akatsu | Automatic button feed device for fitting machine of button for sewing |
| JP2009297347A (en) * | 2008-06-16 | 2009-12-24 | Juki Corp | Button recognition mechanism and button supply device |
-
2008
- 2008-09-03 JP JP2008225671A patent/JP5149742B2/en not_active Expired - Fee Related
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61213753A (en) * | 1985-03-20 | 1986-09-22 | Agency Of Ind Science & Technol | System for detecting flaw on surface of object having regular reflection characteristic |
| JPS61277510A (en) * | 1985-05-31 | 1986-12-08 | Tokyo Juki Ind Co Ltd | Automatic button feeder |
| JPH0477598B2 (en) * | 1985-05-31 | 1992-12-08 | Juki Kk | |
| JPH0223197B2 (en) * | 1987-02-27 | 1990-05-23 | Juki Kk | |
| JPH0278937A (en) * | 1988-09-14 | 1990-03-19 | Omron Tateisi Electron Co | Display method for substrate inspection device |
| JPH0269703U (en) * | 1988-11-15 | 1990-05-28 | ||
| JPH03280166A (en) * | 1990-03-29 | 1991-12-11 | Anritsu Corp | Product inspection device |
| JPH09239169A (en) * | 1996-03-07 | 1997-09-16 | Kazumi Akatsu | Automatic button feed device for fitting machine of button for sewing |
| JP2009297347A (en) * | 2008-06-16 | 2009-12-24 | Juki Corp | Button recognition mechanism and button supply device |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012122870A (en) * | 2010-12-09 | 2012-06-28 | Juki Corp | Three-dimensional shape recognition apparatus |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5149742B2 (en) | 2013-02-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| TWI313576B (en) | Board inspecting apparatus, its parameter setting method and parameter setting apparatus | |
| JP5253986B2 (en) | Button recognition device and button recognition method | |
| JP6357897B2 (en) | Medal identification device and medal identification method | |
| US8929608B2 (en) | Device and method for recognizing three-dimensional position and orientation of article | |
| JP5562407B2 (en) | Substrate inspection apparatus and inspection method | |
| JP2019192248A (en) | System and method for stitching sequential images of object | |
| KR20160084810A (en) | Fish species determination device and fish species determination method | |
| JP4190819B2 (en) | Electronic component mounting apparatus and image recognition method selection method | |
| KR102097342B1 (en) | Method of recognizing bar-code of evaporation mask and appratus for recognizing the same | |
| JP2006329919A (en) | Lighting apparatus and image processing apparatus and method using the same | |
| KR20110089486A (en) | Mounting boards inspection apparatus and method thereof | |
| CN109324350B (en) | Electronic component conveying device and electronic component inspection device | |
| US20210025834A1 (en) | Image Capturing Devices and Associated Methods | |
| JP5149742B2 (en) | Button recognition device and button recognition method | |
| JP6795512B2 (en) | Parts mounting machine | |
| JP2010104569A (en) | Method and device for button front/back determination | |
| JP3993107B2 (en) | Component recognition data creation method and creation apparatus, and component recognition data creation program | |
| US10909713B2 (en) | System and method for item location, delineation, and measurement | |
| JP5475167B1 (en) | Work detection device and work detection method | |
| US9448115B2 (en) | Apparatus and methods for extracting topographic information from inspected objects | |
| JP2016004332A (en) | Model image generation device and model image generation method | |
| JP2016004331A (en) | Medal identification device and medal identification method | |
| JP5084634B2 (en) | Button front / back judgment method | |
| JP5982237B2 (en) | Button front / back discrimination method, button front / back discrimination device, and button supply device | |
| JPH06260798A (en) | Part feeding apparatus |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110831 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121017 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121106 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121130 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5149742 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151207 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |