JP2010051582A - Vacuum cleaner - Google Patents
Vacuum cleaner Download PDFInfo
- Publication number
- JP2010051582A JP2010051582A JP2008220167A JP2008220167A JP2010051582A JP 2010051582 A JP2010051582 A JP 2010051582A JP 2008220167 A JP2008220167 A JP 2008220167A JP 2008220167 A JP2008220167 A JP 2008220167A JP 2010051582 A JP2010051582 A JP 2010051582A
- Authority
- JP
- Japan
- Prior art keywords
- suction port
- vacuum cleaner
- electric
- electric motor
- cleaner
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02B—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO BUILDINGS, e.g. HOUSING, HOUSE APPLIANCES OR RELATED END-USER APPLICATIONS
- Y02B40/00—Technologies aiming at improving the efficiency of home appliances, e.g. induction cooking or efficient technologies for refrigerators, freezers or dish washers
Landscapes
- Electric Vacuum Cleaner (AREA)
Abstract
Description
本発明は、電動機によって回動する回転清掃体を有する吸込口体を備えた電気掃除機に関する。 The present invention relates to a vacuum cleaner including a suction port body having a rotary cleaning body that is rotated by an electric motor.
従来、電動機によって一方向に回動される回転清掃体を有する吸込口体を備え、電動機に供給される電流値から、回転清掃体と被清掃面との間の抵抗の大小を検知して、吸込口体が走行する被掃除面の性質に応じて電動送風機の運転出力を制御する電気掃除機が知られる(例えば、特許文献1および2)。
従来の電気掃除機では、回転清掃体および電動機は一方向に回動される。 In the conventional vacuum cleaner, the rotary cleaning body and the electric motor are rotated in one direction.
他方、吸込口体の前進、後退を検知する移動方向検出手段と、電動機によって進行方向の順方向(または逆方向)に回動される回転清掃体とを備えた吸込口体を有する電気掃除機が知られる。 On the other hand, a vacuum cleaner having a suction port provided with a moving direction detecting means for detecting forward and backward movement of the suction port and a rotary cleaning body rotated in the forward direction (or the reverse direction) by the electric motor. Is known.
このような、電動機によって進行方向の順方向(または逆方向)に回動される回転清掃体を備えた電気掃除機では、吸込口体の前進、後退に対応させて、電動機の回転方向を反転させる必要が生じる。この電動機の反転を行うに当たり、電動機は、制御回路の保護のために、正転、一時停止、逆転、一時停止を繰り返す。そうすると、電動機に供給される電流値は、時間軸方向に激しく変化するので、従来の電気掃除機における被清掃面の性質の識別方法では、吸込口体が走行される被掃除面の性質を正確に検出できない。 In such a vacuum cleaner having a rotary cleaning body that is rotated in the forward direction (or the reverse direction) by the electric motor, the rotation direction of the electric motor is reversed in accordance with the forward and backward movement of the suction port body. Need to be made. In reversing the motor, the motor repeats forward rotation, pause, reverse rotation, and pause to protect the control circuit. As a result, the current value supplied to the electric motor changes drastically in the time axis direction. Therefore, in the conventional method for identifying the property of the surface to be cleaned in a vacuum cleaner, the property of the surface to be cleaned on which the suction port body travels is accurately determined. Cannot be detected.
本発明は、電動機によって進行方向の順方向または逆方向に回動される回転清掃体を備えつつ、吸込口体が走行する被掃除面の性質に応じて電動送風機の運転出力を制御可能な電気掃除機を提案する。 The present invention provides an electric motor capable of controlling the operation output of an electric blower according to the property of a surface to be cleaned on which a suction port body travels while including a rotary cleaning body that is rotated in the forward or reverse direction of the traveling direction by an electric motor. Suggest a vacuum cleaner.
前記の課題を解決するため本発明では、掃除機本体と、前記掃除機本体に収容された電動送風機と、前記掃除機本体に連通された吸込口体と、前記吸込口体に収容された電動機と、前記吸込口体に吸込開口に沿って回動可能に保持され、前記電動機によって回動される回転清掃体と、前記吸込口体に供給される電流が検出される電流検出部と、前記吸込口体の移動方向が検出される移動方向検出部と、前記電動機に供給される電力の極性を正逆反転させる極性反転回路部と、前記電流検出部で検出された電流値が所定の閾値以上になると、所定の待機時間が経過した後に、所定の検出時間内に前記電流検出部で検出された電流値に基づいて、前記電動送風機に供給される電力を制御する制御部とを備えたことを特徴とする。 In order to solve the above problems, in the present invention, a vacuum cleaner main body, an electric blower accommodated in the vacuum cleaner main body, a suction port body communicated with the vacuum cleaner body, and an electric motor accommodated in the suction port body And a rotary cleaning body that is rotatably held by the suction port body along the suction opening and is rotated by the electric motor, a current detection unit that detects a current supplied to the suction port body, and A moving direction detector that detects the moving direction of the suction port, a polarity reversing circuit that reverses the polarity of the power supplied to the electric motor, and a current value detected by the current detector is a predetermined threshold value. If it becomes above, after the predetermined waiting time passed, the control part which controls the electric power supplied to the electric blower based on the current value detected by the current detection part within the predetermined detection time was provided It is characterized by that.
本発明によれば、電動機によって進行方向の順方向または逆方向に回動される回転清掃体を備えつつ、吸込口体が走行する被掃除面の性質に応じて電動送風機の運転出力を制御可能な電気掃除機を提案できる。 According to the present invention, it is possible to control the operation output of the electric blower according to the property of the surface to be cleaned on which the suction port body travels while including the rotary cleaning body that is rotated forward or backward in the traveling direction by the electric motor. Can propose a simple vacuum cleaner.
本発明に係る電気掃除機の実施形態について図1から図7を参照して説明する。 An embodiment of a vacuum cleaner according to the present invention will be described with reference to FIGS. 1 to 7.
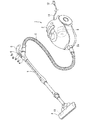
図1は、本発明に係る電気掃除機の外観を示した図である。 FIG. 1 is a view showing an appearance of a vacuum cleaner according to the present invention.
図1に示すように、本実施形態に係る電気掃除機1は、掃除機本体2と、集塵ホース3と、手元操作管4と、把持部5と、操作部6と、延長管7と、吸込口体8とを備える。
As shown in FIG. 1, the
掃除機本体2には集塵ホース3の一端が着脱自在に接続された接続口2aが形成される。掃除機本体2の内部には塵埃分離集塵部(図示省略)と、電動送風機9とが収容される。塵埃分離集塵部は、掃除機本体2の内部に着脱可能に収容され、接続口2aに連通される。電動送風機9は、塵埃分離集塵部を介して接続口2aに負圧を作用させる。掃除機本体2には電動送風機9の排気が吐出される本体排気口(図示省略)が形成される。掃除機本体2は、電源コード11を備える。電源コード11の自由端部には、電源プラグ12が形成される。
The
集塵ホース3は可撓性を有し、湾曲可能な細長略円筒状に形成される。集塵ホース3の一端は接続口2aに着脱可能に接続されて、掃除機本体2の内部に連通される。
The
手元操作管4の一端は集塵ホース3の他端に設けられ、集塵ホース3を介して掃除機本体2の内部に連通される。
One end of the
把持部5は電気掃除機1の使用者が把持して電気掃除機1を操作するものである。把持部5は手元操作管4の他端部から、集塵ホース3が設けられた手元操作管4の一端部に向かって、湾曲させて突設される。
The
操作部6は把持部5に設けられる。操作部6が電気掃除機1の使用者に操作されると、電気掃除機1は複数の駆動モードに設定される。操作部6は電気掃除機1の運転を停止させる切スイッチ6a、電動送風機9の運転を開始させる強起動スイッチ6bや弱起動スイッチ6c、吸込口体8の電動機13の運転を開始または停止させる回転清掃体スイッチ6dなどを有する。
The operation unit 6 is provided on the
延長管7は、伸縮可能な細長略円筒状に形成される。延長管7の一端は手元操作管4の他端に着脱可能に接続されて、手元操作管4および集塵ホース3を介して掃除機本体2の内部に連通される。
The
吸込口体8は、延長管7の一端に着脱可能に接続されて、延長管7、手元操作管4および集塵ホース3を介して掃除機本体2の内部に連通される。
The
電気掃除機1を運転すると、電動送風機9が作動して、掃除機本体2の内に負圧が作用する。この負圧は接続口2aから集塵ホース3と手元操作管4と延長管7とを経て吸込口体8に作用する。そうすると、電気掃除機1は吸込口体8から空気とともに床などの被掃除面に溜まった塵埃を吸い込んで被掃除面を掃除する。吸込口体8に吸い込まれた含塵空気は、掃除機本体2に収容された塵埃分離集塵部によって空気と塵埃とに分離される。分離された塵埃は塵埃分離集塵部に集塵される。他方、分離された空気は、電動送風機9に吸い込まれて、掃除機本体2の本体排気口から吐出される。
When the
図2は、本発明に係る電気掃除機の吸込口体の上面側の斜視図である。 FIG. 2 is a perspective view of the upper surface side of the suction port body of the electric vacuum cleaner according to the present invention.
図2に示すように、吸込口体8は、幅広な吸込口本体15と、接続管部16とを備える。接続管部16は、吸込口本体15の後部であって幅方向中央部に設けられる。接続管部16には延長管7が着脱自在に接続される。
As shown in FIG. 2, the
ここで、吸込口体8の前進方向(図2中、実線矢X)を前方、その反対方向を後方とする。また、吸込口体8の後から前を見たときに左側(図2中、実線矢Y)を左方、その反対方向を右方とする。さらに、吸込口体8の前後方向および左右方向に直交する右手座標系の+Z方向を上方とし、その反対方向を下方とする。
Here, let the advancing direction (solid line arrow X in FIG. 2) of the
吸込口本体15の前側の内部には、吸込開口17を有する吸込室18が形成される。吸込室18は、吸込口本体15の内部に幅広に形成される。吸込室18は、接続管部16に連通される。吸込開口17は、吸込口本体15の底面に形成された開口である。また、吸込開口17は、吸込口本体15の左右方向に細長く形成された略長方形状の開口である。吸込口体8が被清掃面に配置されると、吸込開口17は、被清掃面に対向させて位置される。吸込室18には、吸込開口17の長辺方向に沿って延びた回転清掃体20が配設される。
A
回転清掃体20は、回転軸21と、回転軸21の周壁部から螺旋帯状に突設された複数のブラシ毛22とを備える。回転軸21は、吸込口本体15の左右方向に沿わせて配置される。回転軸21の両端部は、吸込室18を構成する左右の壁部によって回転自在に保持される。なお、回転清掃体20は、ブラシ毛22の他にゴムなどの弾性体で形成されたブレード(図示省略)を備えるものでも良い。
The
吸込口本体15の後側の内部には、電動機13が収容される。電動機13は、回転清掃体20を回動させる駆動源である。電動機13の出力軸は、タイミングベルト25や歯車(図示省略)などの動力伝達機構を介して回転清掃体20の回転軸21に連結される。なお、本実施形態に係る電動機13の回転方向と、回転清掃体20の回転方向とは一致させて構成される。なお、動力伝達機構を介して電動機13と回転清掃体20との回転方向を反転させて構成しても良い。
An
吸込口本体15の前面の中央部には、前方に開口する切欠26が形成される。切欠26は、吸込室18に連通される。また、切欠26は、吸込開口17に連続させて開口される。切欠26には、可動カバー27が設けられる。可動カバー27は、切欠26の上縁部に設けられた支持軸28を中心に回動可能に設けられる。可動カバー27の回動範囲は、前後に所定範囲内で規制される。可動カバー27は、スプリング(図示省略)により付勢され、通常は回転清掃体20に当接しない。
A
接続管部16は、回動接続管部31と、傾動接続管部32とを備える。回動接続管部31は、吸込口本体15に回動可能に設けられる。また、回動接続管部31は、吸込口体8の前後方向であるX軸回りに回動可能に構成される。傾動接続管部32は、回動接続管部31に傾動可能に設けられる。また、傾動接続管部32は、回動接続管部31の回動軸であるX軸に直交する軸回りに回動可能に構成される。さらに、傾動接続管部32は、延長管7の先端部に着脱自在に接続される。したがって、吸込口本体15と延長管7とは、相対的に回動および傾動可能に構成される。
The connecting
図3は、本発明に係る電気掃除機の吸込口体の下面側の斜視図である。 FIG. 3 is a perspective view of the lower surface side of the suction port body of the electric vacuum cleaner according to the present invention.
図3に示すように、吸込口本体15の底面の後部には、接続管部16の左右両側部に突出させて後輪34が左右一対に設けられる。また、吸込口本体15の底面のうち、吸込開口17の後縁近傍部には、左右両側部に偏倚させて前輪35が左右一対に設けられる。
As shown in FIG. 3, a pair of left and right
吸込口本体15の内部には、移動方向検出部36が収容される。移動方向検出部36は、前輪35の少なくともいずれか一方に連結される。移動方向検出部36は、吸込口体8の進行方向を検出する。具体的には、移動方向検出部36は、前輪35の回転方向を検出することで、吸込口体8が前進しているのか、後退しているのかを検出する。移動方向検出部36には、回転部材(図示省略)と、この回転部材の回転方向を検出する光電検出部(図示省略)を有する光検出式センサを用いることができる。
A moving
図4は、本発明に係る電気掃除機のブロック図である。 FIG. 4 is a block diagram of a vacuum cleaner according to the present invention.
図4に示すように、電気掃除機1は、操作部6と、電動送風機9と、スイッチング素子37(第一スイッチング素子)と、スイッチング素子38(第二スイッチング素子)と、電流検出部40と、掃除機本体電源回路41と、掃除機本体制御部42と、吸込口体電源回路44と、移動方向検出部36と、吸込口体制御部45と、極性反転回路部46と、電動機13とを備える。
As shown in FIG. 4, the
電動送風機9と、スイッチング素子37と、スイッチング素子38と、電流検出部40と、掃除機本体電源回路41と、掃除機本体制御部42とは、掃除機本体2に収容される。電動送風機9と、スイッチング素子37とは直列に接続される。また、スイッチング素子38と、電流検出部40とは吸込口体8を挟んで直列に接続される。他方、吸込口体電源回路44と、移動方向検出部36と、吸込口体制御部45と、極性反転回路部46と、電動機13とは、吸込口体8に収容される。
The
操作部6は、電気掃除機1の使用者が入力した操作内容に対応する操作信号を掃除機本体制御部42に出力する。具体的には、操作部6は、電気掃除機1の使用者が切スイッチ6aを操作すると、電気掃除機1の停止信号Soffを掃除機本体制御部42に出力する。また、操作部6は、電気掃除機1の使用者が強起動スイッチ6bを操作すると電気掃除機1の強起動信号Sonbを掃除機本体制御部42に出力する。さらに、操作部6は、電気掃除機1の使用者が弱起動スイッチ6cを操作すると電気掃除機1の弱起動信号Soncを掃除機本体制御部42に出力する。さらにまた、電気掃除機1の使用者が回転清掃体スイッチ6dを操作すると、電動機13の起動信号Sond、停止信号Soffdを交互に掃除機本体制御部42に出力する。
The operation unit 6 outputs an operation signal corresponding to the operation content input by the user of the
電動送風機9は、スイッチング素子37を介して商用電源Eに接続される。
The
スイッチング素子37は、掃除機本体制御部42の制御に応じて電動送風機9に電力を供給する。また、スイッチング素子37は、電力制御用に双方向サイリスタや逆阻止3端子サイリスタなどの素子が用いられる。スイッチング素子37のゲート端子は、掃除機本体制御部42に接続される。
The switching
スイッチング素子38は、掃除機本体制御部42の制御に応じて吸込口体8に電力を供給する。また、スイッチング素子38は、電力制御用に双方向サイリスタや逆阻止3端子サイリスタなどの素子が用いられる。スイッチング素子38のゲート端子は、掃除機本体制御部42に接続される。
The switching element 38 supplies power to the
電流検出部40は、吸込口体8の吸込口体電源回路44に供給される電流を検出して、掃除機本体制御部42に出力する。なお、電流検出部40は、整流回路(図示省略)で全波整流または半波整流した電流値iを検出する。
The
掃除機本体電源回路41は、商用交流電源Eの電圧を5V程度に降圧させた直流電圧を掃除機本体制御部42に供給する。
The cleaner body
掃除機本体制御部42は、操作部6が出力した操作信号に応じてスイッチング素子37を介して電動送風機9の運転を開始または停止する。具体的には、操作部6が強起動信号Sonbを出力すると、電動送風機9の大出力運転を開始する。一方、操作部6が弱起動信号Soncを出力すると、電動送風機9の小出力運転を開始する。他方、操作部6が停止信号Soffを出力すると、電動送風機9の運転を停止する。
The vacuum cleaner main
また、掃除機本体制御部42は、電流検出部40で検出された電流値iが、反転判定閾値Irt(所定の閾値)以上になると、所定の待機時間Twが経過した後に、所定の検出時間Ts内に電流検出部40で検出された電流値iに基づいて、電動送風機9に供給される電力を制御し、電動送風機9の運転出力を制御する。掃除機本体制御部42は、電動送風機9を高い運転出力Ph、または運転出力Phよりも低い運転出力Plに設定できる。電動送風機9の高い運転出力Phは、掃除機本体制御部42が操作部6から強起動信号Sonbを取得した際の電動送風機9の大出力運転に対応させても良い。また、電動送風機9の低い運転出力Plは、掃除機本体制御部42が操作部6から弱起動信号Soncを取得した際の電動送風機9の小出力運転に対応させても良い。
In addition, when the current value i detected by the
さらに、掃除機本体制御部42は、操作部6が起動信号Sondを出力すると、スイッチング素子38を介して吸込口体8に電力を供給し、回転清掃体20の運転を開始する。
Further, when the operation unit 6 outputs the activation signal Son, the cleaner main
さらにまた、掃除機本体制御部42は、電流検出部40で検出された電流値iが、反転判定閾値Irt以上になると、所定の待機時間Twが経過した後に、所定の検出時間Ts内に電流検出部40で検出された電流値iに基づいて、電動機13に供給される電力を制御し、電動機13の運転出力を制御する。
Furthermore, when the current value i detected by the
掃除機本体制御部42は、商用交流電源Eが半サイクルごとに0VからONするまでの時間、すなわち位相角をトリガーレベル値とするトリガー信号Stをスイッチング素子37に出力して、電動送風機9に供給される電力を制御し、電動送風機9の運転出力を制御する。また、掃除機本体制御部42は、トリガー信号Stをスイッチング素子38に出力して、電動機13に供給される電力を制御し、電動機13の運転出力を制御する。さらに掃除機本体制御部42は、中央処理部(図示省略)、メモリ(図示省略)等から構成される。メモリは、中央処理部が実行する制御プログラムや、必要な定数などのデータが記憶される。また、メモリは、中央処理部の演算データなどを一時記憶しておくデータ記憶領域ならびに作業領域として使用される。
The cleaner main
吸込口体電源回路44は、掃除機本体2から供給された商用交流電源Eの電圧を適宜に降圧させた直流電圧を吸込口体制御部45および極性反転回路部46に供給する。
The suction port
移動方向検出部36は、吸込口体8の移動状態に対応させて移動方向信号を吸込口体制御部45に出力する。具体的には、吸込口体8が前進状態のときは前進信号を吸込口体制御部45に出力する。他方、移動方向検出部36は、吸込口体8が後退状態のときは後退信号を吸込口体制御部45に出力する。なお、移動方向検出部36は、吸込口体8が停止状態のときは停止信号を吸込口体制御部45に出力する。すなわち、前進信号、後退信号、および停止信号は移動方向信号である。
The movement
吸込口体制御部45は、移動方向検出部36から入力された移動方向信号に基づき、極性反転回路部46を介して電動機13の回転方向を制御する。
The suction port
例えば、吸込口体制御部45は、吸込口体8の進行方向の順方向に回転清掃体20を運転する。
For example, the suction
ここで、「吸込口体8の進行方向の順方向に回転清掃体20を運転する」とは、吸込口体8が前進している場合には、回転清掃体20を正回転することであり、他方、吸込口体8が後退している場合には、回転清掃体20を逆回転することである。さらに、回転清掃体20の正回転とは、回転する回転清掃体20の角速度ベクトルが吸込口本体15の左方向を指した状態であり、他方、回転清掃体20の逆回転とは、回転する回転清掃体20の角速度ベクトルが吸込口本体15の右方向を指した状態である。回転清掃体20が正回転すると、吸込口体8には前進方向の移動力が発生する。他方、回転清掃体20が逆回転すると、吸込口体8には後退方向の移動力が発生する。
Here, “operating the
すなわち、吸込口体制御部45は、移動方向検出部36が前進信号を出力した場合には、回転清掃体20を正回転で運転する。また、吸込口体制御部45は、移動方向検出部36が後退信号を出力した場合には、回転清掃体20を逆回転で運転する。
That is, the suction port
なお、例えば、吸込口体制御部45は、吸込口体8の進行方向の逆方向に回転清掃体20を運転しても良い。「吸込口体8の進行方向の逆方向に回転清掃体20を運転する」とは、吸込口体8が前進している場合には、回転清掃体20を逆回転することであり、他方、吸込口体8が後退している場合には、回転清掃体20を正回転することである。この場合には、吸込口体制御部45は、移動方向検出部36が前進信号を出力した場合には、回転清掃体20を逆回転で運転する。また、吸込口体制御部45は、移動方向検出部36が後退信号を出力した場合には、回転清掃体20を正回転で運転する。
For example, the suction port
また、吸込口体制御部45は、移動方向検出部36が停止信号を出力した場合には、電動機13を停止して回転清掃体20を停止する。
Moreover, the suction inlet
極性反転回路部46は、吸込口体制御部45の制御に応じて、吸込口体電源回路44から供給される電力の極性を適宜に正逆反転させて電動機13に供給する。具体的には、極性反転回路部46は、回転清掃体20を正回転で運転する際に電動機13に供給する電力の極性と、回転清掃体20を逆回転で運転する際に電動機13に供給する電力の極性とを反転させる。
The polarity reversing
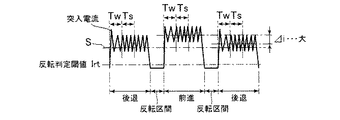
図5および図6は、本発明に係る電気掃除機の吸込口体に供給される電流の時間履歴の概略を示した図である。なお、図5は、木床や畳などの凹凸の少ない被掃除面上で吸込口体8を走行させた場合を示した図であり、図6は、絨毯などの凹凸の多い被掃除面上で吸込口体8を走行させた場合を示した図である。また、吸込口体8の回転清掃体20は、吸込口体8の進行方向の順方向に回動されるものとして説明する。なお、回転清掃体20が吸込口体8の進行方向の逆方向に回動される場合も同様である。
5 and 6 are diagrams showing an outline of a time history of the current supplied to the suction port body of the electric vacuum cleaner according to the present invention. FIG. 5 is a diagram showing a case where the
図5に示すように、吸込口体8を走行させると、吸込口体制御部45の制御によって、回転清掃体20が吸込口体8の進行方向の順方向に回動されるので、電動機13の回転方向は、吸込口体8の前進時には正方向に、後退時には逆方向に回動される。また、吸込口体8の前進と、後退との間には、電動機13の回転方向を切り替えるために、吸込口体8の移動が一次的に停止される反転区間が発生する。この反転区間では、電動機13の回転方向を反転させる際に極性反転回路部46に貫通電流が流れないように、電動機13に供給される電力が遮断される。
As shown in FIG. 5, when the
このような電動機13の動作にともなって、電流検出部40では、電動機13の停止時には、反転判定閾値Irtよりも小さい電流値iが検出される。電動機13が動作し始めた直後は、突入電流が発生して、電流検出部40で検出される電流値iは急激に上昇する。突入電流の減衰時間が経過して電動機13が安定的に動作すると、電流検出部40で検出される電流値iは、吸込口体8の進行に伴って回転清掃体20が被掃除面に押しつけられる前進時の方が、吸込口体8の後退時よりも、若干高めに検出される。
Along with the operation of the
図5および図6に示すように、電動機13が安定的な動作時に、電流検出部40で検出される電流値iは、被掃除面と回転清掃体20との間の抵抗によっても影響される。具体的には、電流検出部40で検出される電流値iは、被掃除面と回転清掃体20との間の抵抗が比較的に低い木床や畳では小さく検出され(電流値iL)、被掃除面と回転清掃体20との間の抵抗が比較的に高い絨毯では大きく検出される(電流値ΔiH)。
As shown in FIGS. 5 and 6, when the
また、吸込口体8の前進時および後退時に、電流検出部40で検出される電流値iの平均値の差Δiも、被掃除面と回転清掃体20との間の抵抗が比較的に低い木床や畳では小さく検出され(平均値の差ΔiL)、被掃除面と回転清掃体20との間の抵抗が比較的に高い絨毯では大きく検出される(平均値の差ΔiH)。
Further, the difference Δi between the average values of the current values i detected by the
そこで、掃除機本体制御部42は、電流検出部40で検出された電流値iが、反転判定閾値Irt以上になると、突入電流の減衰時間よりも長い所定の待機時間Twが経過した後に、電動機13が安定的に動作している所定の検出時間Ts内に電流検出部40で検出された電流値iに基づいて、電動送風機9または電動機13の少なくともいずれかの運転出力を制御する。
Therefore, when the current value i detected by the
図7は、本発明に係る電気掃除機の電動送風機の運転制御のフローチャートである。 FIG. 7 is a flowchart of operation control of the electric blower of the electric vacuum cleaner according to the present invention.
図7に示すように、電気掃除機1は、操作部6の回転清掃体スイッチ6dが操作されて、電動機13の起動信号Sondが掃除機本体制御部42に入力されると、掃除機本体制御部42は、吸込口体8に供給される電流に基づいて電動送風機9の運転制御を開始する。
As shown in FIG. 7, when the rotary cleaning body switch 6 d of the operation unit 6 is operated and the start signal Sond of the
先ず、ステップS1では、掃除機本体制御部42は、電流検出部40で検出された電流値iを取得して、電流値iと、反転判定閾値Irtとを比較して、電流値iが反転判定閾値Irtよりも小さいか否かを判断する。電流値iが反転判定閾値Irtよりも大きい場合は、ステップS2に進む。その他の場合は、ステップS1に戻る。
First, in step S1, the cleaner main
次に、ステップS2では、掃除機本体制御部42は、所定の待機時間Twの間、電流検出部40で検出された電流値iの取得を待機する。
Next, in step S2, the cleaner main
次に、ステップS3では、掃除機本体制御部42は、所定の待機時間Tsの間、電流検出部40で検出された電流値iを取得して、メモリに記録する。
Next, in step S3, the cleaner
次に、ステップS4では、掃除機本体制御部42は、ステップS3で取得した電流値iの平均値iavを算出する。
Next, in step S4, the cleaner
次に、ステップS5では、掃除機本体制御部42は、平均値iavをメモリに記録する。このとき、メモリは少なくとも前回算出した平均値iavを保持しつつ、新たに算出した平均値iavを記録する。
Next, in step S5, the cleaner main
次に、ステップS6では、掃除機本体制御部42は、平均値iavが2回以上算出されたか否かを、メモリを参照して判断する。平均値iavが2回以上算出された場合は、ステップS7に進む。その他の場合は、ステップS1に戻る。
Next, in step S6, the cleaner
次に、ステップS7では、掃除機本体制御部42は、2回の平均値iavの平均値差Δiavを算出する。平均値差Δiavは、通常、吸込口体8の前進時と後退時に、電流検出部40で検出される電流値iの平均値の差Δiとなる。
Next, in step S7, the cleaner main
次に、ステップS8では、掃除機本体制御部42は、平均値差Δiavと、相対閾値ΔSとを比較して、平均値差Δiavが相対閾値ΔSよりも、大きいか否かを判断する。平均値差Δiavが相対閾値ΔSよりも大きい場合はステップS10に進む。その他の場合にはステップS9に進む。
Next, in step S8, the cleaner main
ここで、相対閾値ΔSは、被掃除面と回転清掃体20との間の抵抗が比較的に低い木床や畳で小さく検出される平均値の差ΔiLと、被掃除面と回転清掃体20との間の抵抗が比較的に高い絨毯で大きく検出される平均値の差ΔiHとの間の適宜の値に設定される。
Here, the relative threshold value ΔS is a difference ΔiL between the average values detected by a wooden floor or a tatami mat whose resistance between the surface to be cleaned and the
次にステップS9では、掃除機本体制御部42は、最も新たに算出された平均値差iavと、絶対閾値Sとを比較して、平均値iavが絶対閾値Sよりも小さいか否かを判断する。平均値iavが絶対閾値Sよりも小さい場合は、ステップS10に進む。その他の場合は、ステップS11に進む。
Next, in step S9, the cleaner main
ここで、絶対閾値Sは、被掃除面と回転清掃体20との間の抵抗が比較的に低い木床や畳で小さく検出される電流値iLと、被掃除面と回転清掃体20との間の抵抗が比較的に高い絨毯で大きく検出される電流値iHとの間の適宜の値に設定される。
Here, the absolute threshold value S is a current value iL detected by a wooden floor or tatami mat whose resistance between the surface to be cleaned and the
次に、ステップS10では、掃除機本体制御部42は、スイッチング素子37に出力するトリガー信号Stの位相角を変更して、電動送風機9に供給される電力のデューティー比を上げ、電動送風機9を高い運転出力Phで運転し、ステップS1に戻る。
Next, in step S <b> 10, the cleaner main
次に、ステップS11では、掃除機本体制御部42は、スイッチング素子37に出力するトリガー信号Stの位相角を変更して、電動送風機9に供給される電力のデューティー比を下げ、電動送風機9を低い運転出力Phで運転し、ステップS1に戻る。
Next, in step S <b> 11, the cleaner main
なお、ステップS10およびステップS11では、掃除機本体制御部42は、電動送風機9に代えて電動機13の運転出力を制御することもできる。
In step S10 and step S11, the cleaner main
本実施形態に係る電気掃除機1によれば、掃除機本体制御部42は、電動機13の反転にともなって発生する突入電流の影響を受けずに、吸込口体8に供給される電流値iを電流検出部40で検出して、被掃除面の性質を正確に識別できる。
According to the
本発明に係る電気掃除機1によれば、電動機13によって進行方向の順方向または逆方向に回動される回転清掃体20を備えつつ、吸込口体8が走行する被掃除面の性質に応じて電動送風機9の運転出力を制御可能である。
According to the
1 電気掃除機
2 掃除機本体
2a 接続口
3 集塵ホース
4 手元操作管
5 把持部
6 操作部
6a 切スイッチ
6b 強起動スイッチ
6c 弱起動スイッチ
6d 回転清掃体スイッチ
7 延長管
8 吸込口体
9 電動送風機
11 電源コード
12 電源プラグ
13 電動機
15 吸込口本体
16 接続管部
17 吸込開口
18 吸込室
20 回転清掃体
21 回転軸
22 ブラシ毛
25 タイミングベルト
26 切欠
27 可動カバー
28 支持軸
31 回動接続管部
32 傾動接続管部
34 後輪
35 前輪
36 移動方向検出部
37 スイッチング素子
38 スイッチング素子
40 電流検出部
41 掃除機本体電源回路
42 掃除機本体制御部
44 吸込口体電源回路
45 吸込口体制御部
46 極性反転回路部
DESCRIPTION OF
Claims (2)
前記掃除機本体に収容された電動送風機と、
前記掃除機本体に連通された吸込口体と、
前記吸込口体に収容された電動機と、
前記吸込口体に吸込開口に沿って回動可能に保持され、前記電動機によって回動される回転清掃体と、
前記吸込口体に供給される電流が検出される電流検出部と、
前記吸込口体の移動方向が検出される移動方向検出部と、
前記電動機に供給される電力の極性を正逆反転させる極性反転回路部と、
前記電流検出部で検出された電流値が所定の閾値以上になると、所定の待機時間が経過した後に、所定の検出時間内に前記電流検出部で検出された電流値に基づいて、前記電動送風機に供給される電力を制御する制御部とを備えたことを特徴とする電気掃除機。 The vacuum cleaner body,
An electric blower housed in the vacuum cleaner body;
A suction port communicated with the vacuum cleaner body;
An electric motor housed in the suction port,
A rotary cleaning body that is rotatably held along the suction opening in the suction port body and is rotated by the electric motor,
A current detection unit for detecting a current supplied to the suction port body;
A moving direction detector for detecting the moving direction of the suction port,
A polarity reversing circuit unit for reversing the polarity of the power supplied to the electric motor,
When the current value detected by the current detection unit exceeds a predetermined threshold value, the electric blower is based on the current value detected by the current detection unit within a predetermined detection time after a predetermined standby time has elapsed. And a controller for controlling the power supplied to the electric vacuum cleaner.
所定の検出時間に検出された電流値に基づいて、前記電動機に供給される電力を制御することを特徴とする請求項1に記載の電気掃除機。 The controller is
The electric vacuum cleaner according to claim 1, wherein electric power supplied to the electric motor is controlled based on a current value detected during a predetermined detection time.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008220167A JP5180008B2 (en) | 2008-08-28 | 2008-08-28 | Electric vacuum cleaner |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008220167A JP5180008B2 (en) | 2008-08-28 | 2008-08-28 | Electric vacuum cleaner |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010051582A true JP2010051582A (en) | 2010-03-11 |
| JP5180008B2 JP5180008B2 (en) | 2013-04-10 |
Family
ID=42068128
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008220167A Expired - Fee Related JP5180008B2 (en) | 2008-08-28 | 2008-08-28 | Electric vacuum cleaner |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5180008B2 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012005559A (en) * | 2010-06-23 | 2012-01-12 | Panasonic Corp | Vacuum cleaner |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111568590A (en) * | 2020-07-01 | 2020-08-25 | 卡瓦科尔牙科医疗器械(苏州)有限公司 | System and method for cleaning plant mobile phone with self-adaptive control function |
| WO2025005445A1 (en) * | 2023-06-28 | 2025-01-02 | 삼성전자 주식회사 | Cleaner for reducing inrush current and method for reducing inrush current of cleaner |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63300733A (en) * | 1987-05-30 | 1988-12-07 | 株式会社東芝 | Electric cleaner |
| JPH0538320A (en) * | 1991-05-30 | 1993-02-19 | Tokyo Electric Co Ltd | Suction mouth |
| JP2005160958A (en) * | 2003-12-05 | 2005-06-23 | Toshiba Tec Corp | Electric vacuum cleaner |
| JP2006025825A (en) * | 2004-07-12 | 2006-02-02 | Sharp Corp | Electric vacuum cleaner |
-
2008
- 2008-08-28 JP JP2008220167A patent/JP5180008B2/en not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63300733A (en) * | 1987-05-30 | 1988-12-07 | 株式会社東芝 | Electric cleaner |
| JPH0538320A (en) * | 1991-05-30 | 1993-02-19 | Tokyo Electric Co Ltd | Suction mouth |
| JP2005160958A (en) * | 2003-12-05 | 2005-06-23 | Toshiba Tec Corp | Electric vacuum cleaner |
| JP2006025825A (en) * | 2004-07-12 | 2006-02-02 | Sharp Corp | Electric vacuum cleaner |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012005559A (en) * | 2010-06-23 | 2012-01-12 | Panasonic Corp | Vacuum cleaner |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5180008B2 (en) | 2013-04-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2011030668A (en) | Vacuum cleaner | |
| JP5109608B2 (en) | Electric vacuum cleaner | |
| JP2004033628A (en) | Electric vacuum cleaner | |
| JP5180008B2 (en) | Electric vacuum cleaner | |
| JP2009050604A (en) | Vacuum cleaner | |
| CN110507238B (en) | Self-propelled vacuum cleaner | |
| JP2010005291A (en) | Vacuum cleaner | |
| JP7329417B2 (en) | vacuum cleaner | |
| JP2011010743A (en) | Vacuum cleaner | |
| JP2010119785A (en) | Vacuum cleaner | |
| KR20070102849A (en) | Upright cleaner and its control method | |
| JP6382523B2 (en) | Electric vacuum cleaner | |
| JP3855148B2 (en) | Vacuum cleaner | |
| JP2571735B2 (en) | Electric vacuum cleaner | |
| JPH05207955A (en) | Free-running cleaner | |
| JP2010069019A (en) | Electric vacuum cleaner | |
| JP2011115228A (en) | Vacuum cleaner | |
| JP2013202094A (en) | Vacuum cleaner | |
| JP2750976B2 (en) | Electric vacuum cleaner | |
| KR101932074B1 (en) | Vacuum cleaner and control method for the same | |
| JP2857947B2 (en) | Electric vacuum cleaner | |
| JPH0595882A (en) | Vacuum cleaner | |
| JP2011110380A (en) | Vacuum cleaner | |
| JP5259210B2 (en) | Electric vacuum cleaner | |
| JP2944810B2 (en) | Electric vacuum cleaner |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20100422 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110325 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20111128 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120912 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120925 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121126 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121218 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130110 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5180008 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313117 Free format text: JAPANESE INTERMEDIATE CODE: R313115 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |