JP2010011150A - 動きベクトル検出装置および動画像符号化装置 - Google Patents
動きベクトル検出装置および動画像符号化装置 Download PDFInfo
- Publication number
- JP2010011150A JP2010011150A JP2008168839A JP2008168839A JP2010011150A JP 2010011150 A JP2010011150 A JP 2010011150A JP 2008168839 A JP2008168839 A JP 2008168839A JP 2008168839 A JP2008168839 A JP 2008168839A JP 2010011150 A JP2010011150 A JP 2010011150A
- Authority
- JP
- Japan
- Prior art keywords
- motion vector
- search
- partial search
- partial
- vector
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Landscapes
- Compression Or Coding Systems Of Tv Signals (AREA)
Abstract
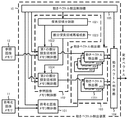
【解決手段】 符号化ブロックのデータを抽出する符号化画像メモリ制御部と、参照画像の探索領域を所定数の探索点と所定数未満の探索点を含む大きさの部分探索領域に分割する探索領域分割部と、所定数の探索点を含む大きさの各部分探索領域の参照ブロックのデータを抽出する第1の部分探索領域群メモリ制御部と、所定数未満の探索点を含む大きさの部分探索領域を組み合わせて再編成する部分探索領域再編成部と、再編成した各部分探索領域の参照ブロックのデータを抽出する第2の部分探索領域群メモリ制御部と、参照ブロックと符号化ブロックの評価値と動きベクトルを算出する動きベクトル検出器と、各動きベクトル検出器が出力する評価値に基づいて判定して、最終判定された評価値に対応する動きベクトルを出力する動きベクトル判定部とを備えた。
【選択図】 図1
Description
この発明の実施形態1では、参照領域に設定されたベクトル探索領域を部分ベクトル探索領域に分割し、後述する所定数未満のベクトル探索点を含む部分探索領域を再編成した第2の部分探索領域群の部分探索領域が、隣接しない部分探索領域の集合である場合について説明する。
この発明の実施の形態1では、図2のように、参照領域に設定されたベクトル探索領域を部分探索領域に分割し、所定数未満のベクトル探索点を含む部分探索領域を再編成した第2の部分探索領域群の部分探索領域が、隣接しない部分探索領域の集合である場合について説明した。
この発明の実施の形態1および実施の形態2では、部分探索領域のベクトル探索点に基づく参照ブロックを垂直方向にライン単位で更新していく例について説明した。
参照ブロックを垂直方向に更新させたときに必要になるラインデータを第1の部分探索領域群メモリ制御部1022、第2の部分探索領域群メモリ制御部1024に読み出させる参照ブロック読み出し指示、参照ブロック時分割読み出し指示、動きベクトル検出部103の動きベクトル検出器1031に参照ブロックを垂直方向にシフトさせるための参照ブロック更新指示、参照ブロック時分割更新指示により、ベクトル探索点の垂直方向の間隔のライン数の単位でシフトして垂直方向に更新するだけとなるが、動きベクトル検出器1031の実装数が増え、回路規模は増大してしまう。よって、ベクトル探索点に対応する参照ブロックを水平方向にシフトして移動させることで対応することも有効である。
この発明の実施の形態1では、動きベクトル判定部104は、動きベクトル判定指示および時分割動きベクトル判定指示を受けると、各動きベクトル検出器1031から出力される評価値の示す相関の高さを判定し、ベクトル探索領域で最も相関の高い評価値に対応する動きベクトルを出力する場合について説明した。
この発明の実施の形態5では、先に説明したこの発明の実施の形態1ないし実施の形態4のいずれかの動きベクトル検出装置を備えた動画像符号化装置について説明する。
11 符号化画像メモリ
12 参照画像メモリ
13 予測画像生成部
14 減算器
15 直交変換・量子化部
16 符号化部
17 逆量子化・逆直交変換部
18 加算器
101 符号化画像メモリ制御部
102 参照画像メモリ制御部
103 動きベクトル検出部
104 動きベクトル判定部
105 動きベクトル検出制御部
1021 探索領域分割部
1022 第1の部分探索領域群メモリ制御部
1023 部分探索領域再編成部
1024 第2の部分探索領域群メモリ制御部
1031 動きベクトル検出器
1041 セレクタ
1042 比較器
1043 評価値メモリ
1044 動きベクトルメモリ
1045 オフセットメモリ
1046 演算器
Claims (6)
- 符号化画像における符号化ブロックのデータを抽出して出力する符号化画像メモリ制御部と、
参照画像に設けられたベクトル探索領域を所定数のベクトル探索点を含む大きさの複数の部分探索領域と前記所定数未満のベクトル探索点を含む大きさの複数の部分探索領域に分割する探索領域分割部と、
この探索領域分割部が分割した参照画像における前記所定数のベクトル探索点を含む大きさの複数の部分探索領域を第1の部分探索領域群とし、この第1の部分探索領域群の各部分探索領域が含むベクトル探索点に基づく参照ブロックのデータを前記参照画像から抽出して出力する第1の部分探索領域群メモリ制御部と、
前記探索領域分割部が分割した参照画像における前記所定数未満のベクトル探索点を含む大きさの複数の部分探索領域を、ベクトル探索点の数の合計が前記所定数を超えないように組み合わせて複数の部分探索領域を再編成する部分探索領域再編成部と、
この部分探索領域再編成部が前記所定数未満のベクトル探索点を含む大きさの複数の部分探索領域を組み合わせて再編成した複数の部分探索領域を第2の部分探索領域群とし、この第2の部分探索領域群の各部分探索領域が含むベクトル探索点に基づく参照ブロックのデータを前記参照画像から抽出して出力する第2の部分探索領域群メモリ制御部と、
前記第1の部分探索領域群メモリ制御部および前記第2の部分探索領域群メモリ制御部が出力する各部分探索領域に含まれるベクトル探索点に基づく参照ブロックのデータについて、前記符号化画像メモリ制御部が出力する符号化ブロックのデータに対する相関を示す評価値と動きベクトルの組を算出する、前記第1の部分探索領域群メモリ制御部および前記第2の部分探索領域群メモリ制御部の部分探索領域ごとに割り当てる複数の動きベクトル検出器を有する動きベクトル検出部と、
この動きベクトル検出部の各動きベクトル検出器が出力する評価値によって示される相関の高さに基づいて、前記参照画像に設けられた探索領域が含む各ベクトル探索点における参照ブロックの評価値を判定して、最終判定された評価値に対応する動きベクトルを出力する動きベクトル判定部と、
前記符号化画像メモリ制御部と前記探索領域分割部と前記第1の部分探索領域群メモリ制御部と前記第2の部分探索領域群メモリ制御部と前記動きベクトル検出部と動きベクトル判定部の処理を制御する動きベクトル検出制御部と
を備えた動きベクトル検出装置。 - 前記動きベクトル判定部は、前記動きベクトル検出部が出力する動きベクトルの長さに基づくオフセットを該動きベクトルに対応する評価値に加減して、オフセットを加減された各評価値を判定することを特徴とする請求項1記載のベクトル検出装置。
- 前記動きベクトル判定部は、前記動きベクトル検出部が出力する動きベクトルの長さに基づくオフセットを重みとして該動きベクトルに対応する評価値に乗算して、オフセットを乗算された各評価値を判定することを特徴とする請求項1記載のベクトル検出装置。
- 前記動きベクトル判定部は、前記動きベクトル検出部が出力する動きベクトルの符号長に基づくオフセットを該動きベクトルに対応する評価値に加減して、オフセットを加減された各評価値を判定することを特徴とする請求項1記載のベクトル検出装置。
- 前記動きベクトル判定部は、前記動きベクトル検出部が出力する動きベクトルの符号長に基づくオフセットを重みとして該動きベクトルに対応する評価値に乗算して、オフセットを乗算された各評価値を判定することを特徴とする請求項1記載のベクトル検出装置。
- 請求項1ないし請求項4記載のいずれかのベクトル検出装置
を備え、
現符号化画像より以前に符号化された符号化画像の符号データを復号した復号画像を参照画像として、この参照画像と前記現符号化画像に対して前記ベクトル検出装置が出力した動きベクトルに基づいて予測画像を生成し、この予測画像と前記現符号化画像との差分を符号化する動画像符号化装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008168839A JP4935771B2 (ja) | 2008-06-27 | 2008-06-27 | 動きベクトル検出装置および動画像符号化装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008168839A JP4935771B2 (ja) | 2008-06-27 | 2008-06-27 | 動きベクトル検出装置および動画像符号化装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010011150A true JP2010011150A (ja) | 2010-01-14 |
| JP4935771B2 JP4935771B2 (ja) | 2012-05-23 |
Family
ID=41591088
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008168839A Expired - Fee Related JP4935771B2 (ja) | 2008-06-27 | 2008-06-27 | 動きベクトル検出装置および動画像符号化装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4935771B2 (ja) |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07193822A (ja) * | 1993-12-24 | 1995-07-28 | Nec Corp | 動き予測プロセッサ及び動き予測装置 |
| JPH07240927A (ja) * | 1993-04-21 | 1995-09-12 | Matsushita Electric Ind Co Ltd | 映像符号化装置 |
| JP2005244844A (ja) * | 2004-02-27 | 2005-09-08 | Seiko Epson Corp | 動画像符号化装置 |
| JP2005318620A (ja) * | 2004-04-30 | 2005-11-10 | Matsushita Electric Ind Co Ltd | 適応時間予測を用いた動きベクトル検出 |
| JP2007020141A (ja) * | 2005-06-08 | 2007-01-25 | Matsushita Electric Ind Co Ltd | 画像符号化装置 |
| JP2007110602A (ja) * | 2005-10-17 | 2007-04-26 | Seiko Epson Corp | 動きベクトル検出装置 |
-
2008
- 2008-06-27 JP JP2008168839A patent/JP4935771B2/ja not_active Expired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07240927A (ja) * | 1993-04-21 | 1995-09-12 | Matsushita Electric Ind Co Ltd | 映像符号化装置 |
| JPH07193822A (ja) * | 1993-12-24 | 1995-07-28 | Nec Corp | 動き予測プロセッサ及び動き予測装置 |
| JP2005244844A (ja) * | 2004-02-27 | 2005-09-08 | Seiko Epson Corp | 動画像符号化装置 |
| JP2005318620A (ja) * | 2004-04-30 | 2005-11-10 | Matsushita Electric Ind Co Ltd | 適応時間予測を用いた動きベクトル検出 |
| JP2007020141A (ja) * | 2005-06-08 | 2007-01-25 | Matsushita Electric Ind Co Ltd | 画像符号化装置 |
| JP2007110602A (ja) * | 2005-10-17 | 2007-04-26 | Seiko Epson Corp | 動きベクトル検出装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4935771B2 (ja) | 2012-05-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR100289899B1 (ko) | 블록간 내삽 예측 부호화 장치와 방법, 및 그 복호화 장치와 방법 | |
| US11070802B2 (en) | Moving image coding device, moving image decoding device, moving image coding/decoding system, moving image coding method and moving image decoding method | |
| US12075083B2 (en) | Image encoding and decoding method with merge flag and motion vectors | |
| RU2518635C2 (ru) | Способ и устройство для кодирования и декодирования блока кодирования границы картинки | |
| JP6807987B2 (ja) | 画像符号化装置、動画像復号装置、動画像符号化データ及び記録媒体 | |
| KR101684207B1 (ko) | 동화상 복호 장치, 동화상 부호화 장치, 동화상 복호 방법, 및 동화상 부호화 방법 | |
| JP5513584B2 (ja) | イントラ予測映像復号化のための方法及び装置 | |
| US20080126278A1 (en) | Parallel processing motion estimation for H.264 video codec | |
| KR20110081304A (ko) | 화상 예측 부호화 장치, 화상 예측 복호 장치, 화상 예측 부호화 방법, 화상 예측 복호 방법, 화상 예측 부호화 프로그램, 및 화상 예측 복호 프로그램 | |
| JP5488613B2 (ja) | 動画像符号化装置および動画像復号装置 | |
| JP2017069866A (ja) | 動画像符号化装置、動画像符号化方法及び動画像符号化用コンピュータプログラム | |
| KR20090075607A (ko) | 참조 블록 파형 정보에 기반하여 인트라 영상을 부호화하는 장치 및 복호화 하는 장치 | |
| JP2008182527A (ja) | 画像符号化装置及び方法、並びに撮像システム | |
| JP2008271127A (ja) | 符号化装置 | |
| JP2015211386A (ja) | 動画像符号化装置、動画像符号化方法及び動画像符号化用コンピュータプログラム | |
| JP4935771B2 (ja) | 動きベクトル検出装置および動画像符号化装置 | |
| JP5195674B2 (ja) | 画像符号化装置 | |
| JP4571069B2 (ja) | 動画像符号化装置 | |
| JP2020058075A (ja) | 動画像予測符号化装置、動画像予測復号装置、動画像予測符号化方法、動画像予測復号方法及び記録媒体 | |
| JPH07143487A (ja) | 画像符号化装置 | |
| JP2008092456A (ja) | 画像符号化装置および画像復号装置 | |
| JP2003125417A (ja) | 画像符号化装置及びその方法 | |
| JP4574020B2 (ja) | 画像処理装置及び画像符号化装置及び画像復号装置 | |
| AU2015230828A1 (en) | Method and apparatus for performing interpolation based on transform and inverse transform | |
| JPWO2011083520A1 (ja) | 動画像符号化装置および動画像復号装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110112 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111214 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120124 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120206 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150302 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4935771 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150302 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |