JP2010005782A - 歩行ロボット及びその制御方法 - Google Patents
歩行ロボット及びその制御方法 Download PDFInfo
- Publication number
- JP2010005782A JP2010005782A JP2009045635A JP2009045635A JP2010005782A JP 2010005782 A JP2010005782 A JP 2010005782A JP 2009045635 A JP2009045635 A JP 2009045635A JP 2009045635 A JP2009045635 A JP 2009045635A JP 2010005782 A JP2010005782 A JP 2010005782A
- Authority
- JP
- Japan
- Prior art keywords
- control mode
- walking robot
- walking
- control
- zmp
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J5/00—Manipulators mounted on wheels or on carriages
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
Abstract
【解決手段】 作業命令を受信し、位置基盤の第1制御モードとトルク基盤の第2制御モードのうち前記受信された作業命令を遂行するのに適切であると判断される制御モードを選択し、前記選択された制御モードによって前記作業命令を遂行する。
【選択図】 図4
Description
15、211、212、213、261、262、271、272、282、283 回転関節
21 大腿リンク
22 下腿リンク
24 多軸F/Tセンサー
31 上腕リンク
32 下腕リンク
33a 指
41 カメラ
42 マイクロホン
100 歩行ロボット
102 上体
102a 胸
102b 腰
104 頭
106L、106R 腕
108L、108R 手
110L,110R 脚
112L,112R 足
114L、114R
120 首
210 大腿関節部
220 膝関節部
230 足首関節部
250L、250R 肩関節アセンブリー
260 ヒジ関節部
270 手首関節部
280 首関節部
Claims (20)
- 作業命令を受信し、
位置基盤の第1制御モードとトルク基盤の第2制御モードのうち前記受信された作業命令を遂行するのに適切であると判断される制御モードを選択し、
前記選択された制御モードによって前記作業命令を遂行する歩行ロボットの制御方法。 - 前記第1制御モードがZMP基盤の制御モードで、
前記第2制御モードがFSM基盤の制御モードであることを特徴とする請求項1に記載の歩行ロボットの制御方法。 - 正確な位置制御が要求される作業命令を遂行するとき、前記ZMP基盤の制御モードを選択することを特徴とする請求項2に記載の歩行ロボットの制御方法。
- 前記受信された作業命令を遂行するために、前記第1制御モードと前記第2制御モードとの間の相互転換を遂行することを特徴とする請求項2に記載の歩行ロボットの制御方法。
- 前記第1制御モードから前記第2制御モードへの転換は、
前記歩行ロボットの現在位置と目標位置との間の位置誤差を計算し、
前記位置誤差を通して前記歩行ロボットの増加変位を計算し、
前記増加変位が予め設定された値以下であると、前記第1制御モードから前記第2制御モードに転換して前記作業命令を遂行することを特徴とする請求項4に記載の歩行ロボットの制御方法。 - 前記歩行ロボットの増加変位は、
前記歩行ロボットの上体の増加変位と、前記歩行ロボットのスイングする脚の増加変位とを含むことを特徴とする請求項5に記載の歩行ロボットの制御方法。 - 前記増加変位が前記予め設定された値より大きいと、前記増加変位の補間された値を獲得し、
前記補間された増加変位に基づいて前記作業命令を遂行することを特徴とする請求項5に記載の歩行ロボットの制御方法。 - 前記補間された増加変位を獲得すると、前記歩行ロボットの制御モードを前記第1制御モードに再設定し、次に行われる前記第1制御モードから前記第2制御モードへの転換に備えることを特徴とする請求項7に記載の歩行ロボットの制御方法。
- 前記歩行ロボットの制御モードが前記第1制御モードに再設定される場合にも、前記作業命令の実質的な遂行は前記第2制御モードで遂行することを特徴とする請求項8に記載の歩行ロボットの制御方法。
- 前記第2制御モードから前記第1制御モードへの転換は、
前記歩行ロボットの現在のZMPと目標ZMPとの間のZMP誤差を計算し、
前記ZMP誤差を通して前記歩行ロボットの増加変位を計算し、
前記増加変位が予め設定された値以下であると、前記第2制御モードから前記第1制御モードに転換して前記作業命令を遂行することを特徴とする請求項4に記載の歩行ロボットの制御方法。 - 前記歩行ロボットの増加変位は、
前記歩行ロボットの重力中心点(COG)の増加変位を含むことを特徴とする請求項10に記載の歩行ロボットの制御方法。 - 前記増加変位が前記予め設定された値より大きいと、前記増加変位の補間された値を獲得し、
前記補間された増加変位に基づいて前記作業命令を遂行することを特徴とする請求項10に記載の歩行ロボットの制御方法。 - 前記補間された増加変位を獲得すると、前記歩行ロボットの制御モードを前記第2制御モードに再設定し、次に行われる前記第2制御モードから前記第1制御モードへの転換に備えることを特徴とする請求項12に記載の歩行ロボットの制御方法。
- 前記歩行ロボットの制御モードが前記第2制御モードに再設定される場合にも、前記作業命令の実質的な遂行は前記第1制御モードで遂行することを特徴とする請求項13に記載の歩行ロボットの制御方法。
- 上体と、
前記上体を支持する複数の足と、
作業命令を受信し、位置基盤の第1制御モードとトルク基盤の第2制御モードのうち前記受信された作業命令を遂行するのに適切であると判断される制御モードを選択し、前記選択された制御モードによって前記作業命令が遂行されるように制御する制御部と、を含む歩行ロボット。 - 前記第1制御モードがZMP基盤の制御モードで、
前記第2制御モードがFSM基盤の制御モードであることを特徴とする請求項15に記載の歩行ロボット。 - 前記制御部は、
正確な位置制御が要求される作業命令を遂行するとき、前記ZMP基盤の制御モードを選択することを特徴とする請求項16に記載の歩行ロボット。 - 前記制御部は、
前記受信された作業命令を遂行するために、前記第1制御モードと前記第2制御モードとの間の相互転換を遂行することを特徴とする請求項16に記載の歩行ロボット。 - 前記FSM基盤の制御モードを遂行するための予め定められた状態情報を保存する状態情報保存部を備えることを特徴とする請求項16に記載の歩行ロボット。
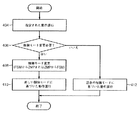
- ロボットが歩行する地形の傾斜及び困難性を決定する段階と、
前記傾斜がなく、及び前記困難性が低い場合、FSM基盤の歩行制御を選択する段階と、
前記傾斜があり、又は前記困難性が高い場合、ZMP基盤の歩行制御を選択する段階と、を含む歩行ロボットの制御方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020080061523A KR20100001567A (ko) | 2008-06-27 | 2008-06-27 | 보행 로봇 및 그 제어 방법 |
| KR10-2008-0061523 | 2008-06-27 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010005782A true JP2010005782A (ja) | 2010-01-14 |
| JP5607886B2 JP5607886B2 (ja) | 2014-10-15 |
Family
ID=41446048
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009045635A Expired - Fee Related JP5607886B2 (ja) | 2008-06-27 | 2009-02-27 | 歩行ロボット及びその制御方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20090321150A1 (ja) |
| JP (1) | JP5607886B2 (ja) |
| KR (1) | KR20100001567A (ja) |
Families Citing this family (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8511964B2 (en) * | 2009-09-22 | 2013-08-20 | GM Global Technology Operations LLC | Humanoid robot |
| KR101687630B1 (ko) * | 2010-01-11 | 2016-12-20 | 삼성전자주식회사 | 보행 로봇 및 그 균형 제어 방법 |
| KR20110082394A (ko) * | 2010-01-11 | 2011-07-19 | 삼성전자주식회사 | 보행 로봇 및 그 제어 방법 |
| JP5950234B2 (ja) | 2010-02-25 | 2016-07-13 | 本田技研工業株式会社 | 非水平および非定常の地面上にいる人型ロボットの運動量基準型バランス制御装置 |
| KR20120069333A (ko) * | 2010-12-20 | 2012-06-28 | 삼성전자주식회사 | 로봇의 보행 제어 장치 및 그 제어 방법 |
| KR101778027B1 (ko) * | 2010-12-21 | 2017-09-13 | 삼성전자주식회사 | 보행 로봇 및 그 자세 제어 방법 |
| KR20120069924A (ko) * | 2010-12-21 | 2012-06-29 | 삼성전자주식회사 | 보행 로봇 및 그 제어 방법 |
| US9162721B2 (en) * | 2011-02-09 | 2015-10-20 | Florida Institute of Technology, Inc. | Robotic walking apparatus |
| JP5441018B2 (ja) * | 2011-03-15 | 2014-03-12 | 株式会社安川電機 | ロボットシステム |
| US8849454B2 (en) | 2011-03-21 | 2014-09-30 | Honda Motor Co., Ltd. | Humanoid robot push recovery on level and non-level ground |
| CN102672703B (zh) * | 2012-05-30 | 2015-03-11 | 哈尔滨工程大学 | 一种轮式移动服务机器人 |
| US9561592B1 (en) * | 2015-05-15 | 2017-02-07 | Google Inc. | Ground plane compensation for legged robots |
| JP1545285S (ja) * | 2015-08-17 | 2016-03-07 | ||
| USD774148S1 (en) * | 2015-09-01 | 2016-12-13 | Softbank Robotics Europe | Humanoid robot |
| JP1556885S (ja) | 2015-09-17 | 2016-08-22 | ||
| USD795321S1 (en) * | 2015-12-07 | 2017-08-22 | UBTECH Robotics Corp. | Entertainment robot |
| USD795320S1 (en) * | 2015-12-07 | 2017-08-22 | UBTECH Robotics Corp. | Entertainment robot |
| US10532464B1 (en) * | 2017-07-05 | 2020-01-14 | Luis GUZMAN | Walking robot |
| WO2020133288A1 (zh) * | 2018-12-28 | 2020-07-02 | 深圳市优必选科技有限公司 | 一种双足机器人步态控制方法以及双足机器人 |
| US11548151B2 (en) | 2019-04-12 | 2023-01-10 | Boston Dynamics, Inc. | Robotically negotiating stairs |
| CN111114668B (zh) * | 2020-03-27 | 2020-07-07 | 之江实验室 | 基于关节工况多象限耦合的双足机器人数字液压驱动方法 |
| US12094195B2 (en) | 2020-04-20 | 2024-09-17 | Boston Dynamics, Inc. | Identifying stairs from footfalls |
| US12077229B2 (en) | 2020-04-22 | 2024-09-03 | Boston Dynamics, Inc. | Stair tracking for modeled and perceived terrain |
| USD989147S1 (en) * | 2021-06-21 | 2023-06-13 | Pollen Robotics | Robot for guiding individuals |
| US12139219B1 (en) | 2021-06-22 | 2024-11-12 | Luis GUZMAN | Walking robot |
| CN115303383B (zh) * | 2022-06-10 | 2023-04-07 | 北京建筑大学 | 一种基于新型凸轮行走机构的步行机器人 |
| USD1082881S1 (en) * | 2022-06-30 | 2025-07-08 | Beijing Xiaomi Robot Technology Co., Ltd. | Intelligent service robot |
| US20240091964A1 (en) * | 2022-09-16 | 2024-03-21 | Sarcos Corp. | Multidirectional Sensing Array for Robot Perception |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0671578A (ja) * | 1992-02-26 | 1994-03-15 | Honda Motor Co Ltd | 脚式移動ロボットの歩行制御装置 |
| JP2003145456A (ja) * | 2001-11-19 | 2003-05-20 | Japan Science & Technology Corp | 二脚歩行式人型ロボット |
| JP2003145457A (ja) * | 2001-11-19 | 2003-05-20 | Japan Science & Technology Corp | 二脚歩行式移動装置およびその歩行制御装置並びに歩行制御方法 |
| JP2006007376A (ja) * | 2004-06-28 | 2006-01-12 | National Institute Of Advanced Industrial & Technology | 人間型ロボットの制御装置 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100937268B1 (ko) * | 2001-08-01 | 2010-01-18 | 소니 주식회사 | 다리식 이동 로봇 및 그 동작 제어 방법 |
| DE60238426D1 (de) * | 2001-08-29 | 2011-01-05 | Honda Motor Co Ltd | Fernsteuervorrichtung für beweglichen zweibeinigen roboter |
| US7366587B2 (en) * | 2002-12-05 | 2008-04-29 | Sony Corporation | Legged mobile robot |
| JP4587738B2 (ja) * | 2003-08-25 | 2010-11-24 | ソニー株式会社 | ロボット装置及びロボットの姿勢制御方法 |
| US7418312B2 (en) * | 2003-09-19 | 2008-08-26 | Sony Corporation | Robot apparatus and walking control method thereof |
| KR101549817B1 (ko) * | 2009-01-22 | 2015-09-04 | 삼성전자 주식회사 | 로봇의 보행 제어장치 및 그 방법 |
-
2008
- 2008-06-27 KR KR1020080061523A patent/KR20100001567A/ko not_active Abandoned
-
2009
- 2009-02-27 JP JP2009045635A patent/JP5607886B2/ja not_active Expired - Fee Related
- 2009-03-10 US US12/382,188 patent/US20090321150A1/en not_active Abandoned
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0671578A (ja) * | 1992-02-26 | 1994-03-15 | Honda Motor Co Ltd | 脚式移動ロボットの歩行制御装置 |
| JP2003145456A (ja) * | 2001-11-19 | 2003-05-20 | Japan Science & Technology Corp | 二脚歩行式人型ロボット |
| JP2003145457A (ja) * | 2001-11-19 | 2003-05-20 | Japan Science & Technology Corp | 二脚歩行式移動装置およびその歩行制御装置並びに歩行制御方法 |
| JP2006007376A (ja) * | 2004-06-28 | 2006-01-12 | National Institute Of Advanced Industrial & Technology | 人間型ロボットの制御装置 |
Non-Patent Citations (1)
| Title |
|---|
| JPN7013001158; KangKang Yin, Kevin Loken, Michiel van de Panne: 'SIMBICON: Simple Biped Locomotion Control' Proc. of ACM SIGGRAPH 2007 Volume 26 Isssue 3, 200707, Article No. 105 (105-1 - 105-10) * |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20100001567A (ko) | 2010-01-06 |
| JP5607886B2 (ja) | 2014-10-15 |
| US20090321150A1 (en) | 2009-12-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5607886B2 (ja) | 歩行ロボット及びその制御方法 | |
| JP5916998B2 (ja) | 人間型ロボット及びその歩行制御方法 | |
| EP2347867B1 (en) | Walking control apparatus of robot and method of controlling the same | |
| KR101549817B1 (ko) | 로봇의 보행 제어장치 및 그 방법 | |
| KR101985790B1 (ko) | 보행 로봇 및 그 제어 방법 | |
| KR101732901B1 (ko) | 보행 로봇 및 그 제어방법 | |
| KR101687629B1 (ko) | 인간형 로봇 및 그 보행 제어방법 | |
| KR101809972B1 (ko) | 보행 로봇 및 그 제어방법 | |
| US8868239B2 (en) | Walking control apparatus of robot and method of controlling the same | |
| KR101766755B1 (ko) | 보행 로봇 및 그 제어방법 | |
| KR101687630B1 (ko) | 보행 로봇 및 그 균형 제어 방법 | |
| JP2013126711A (ja) | 歩行ロボット及びその制御方法 | |
| EP2343161A1 (en) | Walking robot and method of controlling the same | |
| JP2010058261A (ja) | ロボット及びその制御方法 | |
| KR20130034082A (ko) | 로봇 및 그 제어 방법 | |
| WO2002045913A1 (en) | Device and method for controlling operation of legged robot, and robot device | |
| KR101760883B1 (ko) | 로봇 및 그 제어방법 | |
| KR20120024098A (ko) | 보행 로봇 및 그 제어방법 | |
| JP2002210681A (ja) | 脚式移動ロボットのための動作制御装置及び動作制御方法、並びにロボット装置 | |
| JP4352774B2 (ja) | 脚式歩行ロボットの運動制御装置及び運動制御方法 | |
| JP2006095661A (ja) | ロボット装置並びにロボット用車輪装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120207 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130122 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130402 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20130702 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130705 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130802 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140218 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140515 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140805 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140829 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5607886 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |