JP2008536583A - 身体の位置間の寸法を確定するシステムおよび関連方法 - Google Patents
身体の位置間の寸法を確定するシステムおよび関連方法 Download PDFInfo
- Publication number
- JP2008536583A JP2008536583A JP2008506814A JP2008506814A JP2008536583A JP 2008536583 A JP2008536583 A JP 2008536583A JP 2008506814 A JP2008506814 A JP 2008506814A JP 2008506814 A JP2008506814 A JP 2008506814A JP 2008536583 A JP2008536583 A JP 2008536583A
- Authority
- JP
- Japan
- Prior art keywords
- distance
- transmitter
- coupled
- receivers
- data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims abstract description 27
- 230000000694 effects Effects 0.000 claims abstract description 25
- 238000002604 ultrasonography Methods 0.000 claims description 20
- 238000005259 measurement Methods 0.000 claims description 19
- 230000001133 acceleration Effects 0.000 claims description 16
- 238000004891 communication Methods 0.000 claims description 15
- 238000012545 processing Methods 0.000 claims description 11
- 230000001771 impaired effect Effects 0.000 claims description 8
- 239000000853 adhesive Substances 0.000 claims description 6
- 230000001070 adhesive effect Effects 0.000 claims description 6
- 238000004364 calculation method Methods 0.000 claims description 5
- 230000003287 optical effect Effects 0.000 claims description 5
- 230000008878 coupling Effects 0.000 claims description 3
- 238000010168 coupling process Methods 0.000 claims description 3
- 238000005859 coupling reaction Methods 0.000 claims description 3
- 208000006011 Stroke Diseases 0.000 description 24
- 230000033001 locomotion Effects 0.000 description 24
- 210000003414 extremity Anatomy 0.000 description 22
- 238000010586 diagram Methods 0.000 description 12
- 230000006870 function Effects 0.000 description 11
- 210000004247 hand Anatomy 0.000 description 8
- 210000000245 forearm Anatomy 0.000 description 7
- 230000008569 process Effects 0.000 description 7
- 230000003068 static effect Effects 0.000 description 5
- 210000000707 wrist Anatomy 0.000 description 5
- 230000008859 change Effects 0.000 description 4
- 238000012360 testing method Methods 0.000 description 4
- 125000002066 L-histidyl group Chemical group [H]N1C([H])=NC(C([H])([H])[C@](C(=O)[*])([H])N([H])[H])=C1[H] 0.000 description 3
- 101100218522 Schizosaccharomyces pombe (strain 972 / ATCC 24843) bpb1 gene Proteins 0.000 description 3
- 238000013459 approach Methods 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 3
- 238000006073 displacement reaction Methods 0.000 description 3
- 230000000638 stimulation Effects 0.000 description 3
- 0 CC[C@@](CC(C*)CCCCCC[C@@](C)(I)IIIIC(C=C1)=C(C*)C1=*)IIII Chemical compound CC[C@@](CC(C*)CCCCCC[C@@](C)(I)IIIIC(C=C1)=C(C*)C1=*)IIII 0.000 description 2
- UELITFHSCLAHKR-UHFFFAOYSA-N acibenzolar-S-methyl Chemical compound CSC(=O)C1=CC=CC2=C1SN=N2 UELITFHSCLAHKR-UHFFFAOYSA-N 0.000 description 2
- 238000011156 evaluation Methods 0.000 description 2
- 239000000835 fiber Substances 0.000 description 2
- 210000003811 finger Anatomy 0.000 description 2
- 230000037081 physical activity Effects 0.000 description 2
- 208000008238 Muscle Spasticity Diseases 0.000 description 1
- 206010033799 Paralysis Diseases 0.000 description 1
- 241000620457 Telestes souffia Species 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 230000002457 bidirectional effect Effects 0.000 description 1
- 238000011088 calibration curve Methods 0.000 description 1
- 229940055355 control rx Drugs 0.000 description 1
- 238000007405 data analysis Methods 0.000 description 1
- 230000004064 dysfunction Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 238000007654 immersion Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 238000000691 measurement method Methods 0.000 description 1
- 238000004377 microelectronic Methods 0.000 description 1
- 230000004899 motility Effects 0.000 description 1
- 235000001968 nicotinic acid Nutrition 0.000 description 1
- 238000010606 normalization Methods 0.000 description 1
- 239000013307 optical fiber Substances 0.000 description 1
- 238000005192 partition Methods 0.000 description 1
- 238000000554 physical therapy Methods 0.000 description 1
- 230000000644 propagated effect Effects 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 208000018198 spasticity Diseases 0.000 description 1
- 230000007480 spreading Effects 0.000 description 1
- 210000003813 thumb Anatomy 0.000 description 1
- 238000012549 training Methods 0.000 description 1
Images













Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Detecting, measuring or recording devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor, mobility of a limb
- A61B5/1126—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor, mobility of a limb using a particular sensing technique
- A61B5/1127—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor, mobility of a limb using a particular sensing technique using markers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0002—Remote monitoring of patients using telemetry, e.g. transmission of vital signals via a communication network
- A61B5/0031—Implanted circuitry
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Detecting, measuring or recording devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Detecting, measuring or recording devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/107—Measuring physical dimensions, e.g. size of the entire body or parts thereof
- A61B5/1071—Measuring physical dimensions, e.g. size of the entire body or parts thereof measuring angles, e.g. using goniometers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6801—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be attached to or worn on the body surface
- A61B5/6813—Specially adapted to be attached to a specific body part
- A61B5/6823—Trunk, e.g., chest, back, abdomen, hip
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6801—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be attached to or worn on the body surface
- A61B5/6813—Specially adapted to be attached to a specific body part
- A61B5/6824—Arm or wrist
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6801—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be attached to or worn on the body surface
- A61B5/683—Means for maintaining contact with the body
- A61B5/6831—Straps, bands or harnesses
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Medical Informatics (AREA)
- Surgery (AREA)
- Biophysics (AREA)
- Pathology (AREA)
- Veterinary Medicine (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Public Health (AREA)
- Molecular Biology (AREA)
- Physics & Mathematics (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Dentistry (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Computer Networks & Wireless Communication (AREA)
- Physiology (AREA)
- Measurement Of The Respiration, Hearing Ability, Form, And Blood Characteristics Of Living Organisms (AREA)
- Rehabilitation Tools (AREA)
Abstract
Description
発明の分野
本発明は、包括的には身体の位置間の寸法を確定するために使用されるシステムの分野に関する。より詳細には、本発明は、身体の位置間の距離および/または方向を測定し、その測定値に基づいて身体に対するリハビリテーション治療の効果を特徴付けるシステムおよび関連方法に関する。
脳卒中は、永久的な機能障害及び身体障害の主な原因である。たとえば、全脳卒中生存者のおよそ70%に、四肢、たとえば腕または手の麻痺が残る。リハビリテーション治療を受ける脳卒中犠牲者は、脳卒中の直後、通常は脳卒中後の最初の3ヶ月以内、障害のある四肢の元の可動性の幾分かを回復する可能性がある。脳卒中犠牲者のためのリハビリテーション過程をより効率的にするのを助けるために、かつ患者の経過の評価を支援するために、いくつかの技法が開発されてきた。これら技法のうちのいくつかには、単純なリハビリ器具を使用して療法士によって行われる人力によるリハビリテーションが含まれる。療法士は、リハビリテーション過程の間に、たとえば、当業者には既知である、ボックスアンドブロックテスト(Box and Block Test)、バランススケール(Balance Scale)およびバーセルインデックス(Barthel Index)におけるスコアを結合する脳卒中リハビリテーション運動評価(Stroke Rehabilitation Assessment of Movement)(「STREAM」)を含む種々の方法を使用して、患者の経過を評価することができる。
本発明は、日常使用を含む、リハビリテーション治療中に脳卒中患者の障害のある四肢の可動性を評価するシステムおよび関連方法に関する。本発明の例示的な実施形態は、身体に対するリハビリテーション治療の効果を特徴付けるように構成されるシステムである。本システムは、身体の第1位置に結合されるように構成される第1デバイスと、第1位置から第1距離だけ離れている身体の第2位置に結合されるように構成される第2デバイスと、を含む。第1デバイスは、第1無線信号を生成するように構成される。第2デバイスは、第1無線信号を検出し、該検出された第1無線信号に基づいて、第1距離を計算するために使用されるように構成されるデータを生成するように構成される。第1距離は、身体に対するリハビリテーション治療の効果を特徴づけるために使用される。
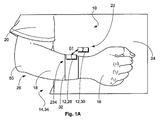
本発明の実施形態は、日常の活動を含むリハビリテーション治療中に患者の四肢の可動性を評価する比較的安価でありかつ携帯性の手法を提供する。図1Aおよび図1Bを参照すると、本発明の実施形態は、互いに無線で通信するように構成される小型デバイス12を含むシステム10である。システム10は、デバイス間にいかなる物理的相互接続も必要としない。。本発明の実施形態は、これら小型デバイスを利用して、患者の身体14の部位に対し静的パラメータおよび動きパラメータを測定する。
本発明の実施形態では、デバイス12のうちの1つ(たとえば送信機)によって生成され、かつ別のデバイス(たとえば受信機)によって検出される磁界に基づいて、距離および/または方向測定値が確定される。磁界は、たとえば、低周波数磁界、すなわちおよそ10KHz未満から数百KHzまでの周波数を有する磁界であってもよい。直交低周波数磁界が利用される場合、送信機に対する受信機の距離および方向を計算することができる。この手法には、通常、送信機と受信機との両方において3つの小型直交コイルを使用する必要がある。
Vr11=f11(G1、D、θ、φ)ここで、D、θおよびφは未知である。
Vr12=f12(G2、D、θ、φ)
Vr21=f21(G1、D、θ、φ)
Vr22=f22(G2、D、θ、φ)
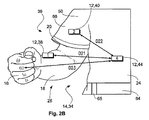
患者の身体14の部位16〜20および26、たとえば患者の手16または腕26の可動性を追跡する場合、移動の距離のみではなく方向も測定する必要のある場合がある。このような場合、図7を参照すると、2つのデバイス114、すなわち送信コイル118を有する送信機116と受信コイル122を有する受信機120との間の距離を測定することにより、患者の身体の部位が移動する距離を測定することが可能である。これは、磁界126、たとえば送信コイルによって生成される低周波数磁界によって受信コイルに誘導される電圧124を測定することによって行うことができる。
他の実施形態では、デバイス12間の距離を、音波、すなわちおよそ20Hzからおよそ20KHzまでの周波数を有する波、または超音波、すなわちおよそ20KHzからおよそ10MHzまでの周波数を有する波の、振幅、位相および/または伝播時間に基づいて測定することができる。再び図1Aを参照すると、音波および超音波は、送信機30から受信機28に送信することができるタイプの無線信号である。超音波距離測定デバイスは、バーモント州、ストリート・ブリストルのセニックス・コーポレイション(Senix Corporation(St.Bristol,Vermont))から販売されている。
図10は、本発明の一実施形態によるデータ取得システム200の概略図である。図10において、電池式距離送信機TX202は、信号、たとえば低周波数磁界を生成する。TXによって生成される磁界は、複数の電池式距離受信機RX1 204およびRX2 206によって検出され、処理されてデータ化される(processed into data)。複数の電池式距離受信機RX1 204およびRX2 206は、夫々データ送信機TX1 208およびTX2 210に結合され、夫々異なる位置212および214に配置される。
図11に、実施形態のシステム10、36、67、80、82、128、156および200によってとられるステップを表す例示的なアルゴリズム226を示す。アルゴリズムの開始(228)後、次のステップ230において、身体14の第1位置22に結合されるように構成され、無線信号98、126および162(図6乃至図8参照)を送信するように構成される、第1デバイス30を提供する。次に、ステップ232において、身体の第2位置234(図1A参照)に結合されるように構成され、無線信号を検出するように構成される第2デバイス28を提供する。
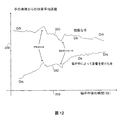
患者の活動の期間中に蓄積される距離および/または方向データを、外部デバイス76、220(たとえばコンピュータ224)によってリアルタイムにまたはオフラインで分析することができる。データを処理する種々のアルゴリズムが入手可能である。たとえば、図12に示すように、患者の手16と身体14、すなわち胴24との間の平均距離を計算し提示することができる。図12は、患者34が脳卒中になった後の或る期間258に亙る患者の胴に対する手の平均移動距離256の変化を示す。特に、図12は、患者の健康な手に対する平均移動距離の第1トレース260と、患者の障害のある手に対する平均移動距離の第2トレース262と、を含む。さらに図7、図8および図10を参照すると、健康な手に結合される第1受信機120、170、204と、障害のある手に結合される第2受信機132、178、206と、からのデータに基づいて、第1トレースおよび第2トレースを外部デバイスによって計算することができる。さらに図1Aおよび図1Bならびに図2Aおよび図2Bを参照すると、図1Aおよび図1Bならびに図2Aおよび図2Bの実施形態は、患者の腕26のうちの1つと患者の胴とに結合されるデバイス12のみを示すが、当業者は、本発明の実施形態が、患者の腕の両方と患者の胴とに結合されるデバイス群を含むことができる、ということを理解するはずである。
Claims (26)
- 身体に対するリハビリテーション治療の効果を特徴付けるように構成されるシステムであって、
a.該身体の第1位置に結合されるように構成される第1デバイスと、
b.該第1位置から第1距離で離れている該身体の第2位置に結合されるように構成される第2デバイスと、
を具備し、
c.
i.該第1デバイスが、第1無線信号を生成するように構成され、
ii.該第2デバイスが、該第1無線信号を検出し、該検出された第1無線信号に基づいて、該第1距離を計算するために使用されるように構成されるデータを生成し、
iii.該第1距離が、該身体に対する該リハビリテーション治療の該効果を特徴づけるために使用される、システム。 - 前記第2位置から第2距離で離れている前記身体の第3位置に結合されるように構成される第3デバイスをさらに具備し、
a.前記第1デバイスが、第1周波数で前記第1無線信号を生成するように構成され、
b.該第3デバイスが、第2周波数で第2無線信号を生成するように構成され、
c.前記第2デバイスが、該第2無線信号を検出し、該検出された第2無線信号に基づいて、該第2距離を計算するために使用されるように構成される追加のデータを生成するように構成され、
d.該第2距離が、該身体に対する前記リハビリテーション治療の前記効果を特徴付けるために使用される、請求項1に記載のシステム。 - 前記第3デバイスが、前記第1デバイスが前記第1無線信号を生成するように構成されるのと同時に、前記第2無線信号を生成するように構成される、請求項2に記載のシステム。
- 前記第2デバイスが、前記第1無線信号と前記第2無線信号とからなる群から選択される信号を選択可能な方法で検出するように構成される、請求項3に記載のシステム。
- 外部デバイスをさらに具備し、
a.該外部デバイスが、前記第2デバイスと通信するように構成され、
b.該第2デバイスが、該外部デバイスに前記データを通信するように構成され、
c.該外部デバイスが、該データに基づいて前記第1距離を計算するように構成される、請求項1に記載のシステム。 - 前記外部デバイスが、前記データに基づいて前記第2デバイスと前記第1デバイスとの間の方向角を計算するように構成される、請求項5に記載のシステム。
- 前記外部デバイスが、無線周波数経路と、身体を通る電流経路と、変調音波の通信のために構成される経路と、変調超音波の通信のために構成される経路と、光通信経路と、からなる群から選択される無線通信経路を介して前記第2デバイスと通信するように構成される、請求項5に記載のシステム。
- 前記外部デバイスが、或る期間に亙る前記第1距離の平均と、或る期間に亙る該第1距離の標準偏差と、或る期間に亙る該第1距離に基づく前記第2デバイスが前記第1デバイスに対して移動する回数と、該第1距離に基づく該第1デバイスに対する該第2デバイスの速度と、或る期間に亙る該第1距離に基づく該第1デバイスに対する該第2デバイスの平均速度と、該第1距離に基づく該第1デバイスに対する該第2デバイスの加速度と、或る期間に亙る該第1距離に基づく該第1デバイスに対する該第2デバイスの平均加速度と、からなる群から選択される値を計算するように構成される、請求項5に記載のシステム。
- 前記第1デバイスおよび前記第2デバイスのうちの少なくとも1つのデバイスが、
a.該少なくとも1つのデバイスを前記身体内に埋め込むことと、
b.該少なくとも1つのデバイスを、接着剤、衣服片、ストラップ、ベルト、クリップおよび時計からなる群から選択される結合器具を使用して該身体に取り付けることと、
からなる群から選択される方法を介して、該身体に結合されるように構成される、請求項1に記載のシステム。 - a.前記身体が、胴と、手および腕からなる群から選択される別の部位と、を含み、
b.前記第1デバイスが、該胴に結合されるように構成され、
c.前記第2デバイスが、該別の部位に結合されるように構成される、請求項1に記載のシステム。 - 前記無線信号が、磁界、低周波数磁界、音波および超音波からなる群から選択される、請求項1に記載のシステム。
- 前記第1デバイスおよび前記第2デバイスのうちの少なくとも一方が、電池、コイル、直交コイル、発電器、電圧測定回路、トランスデューサ、処理回路、送信機、受信機および送受信機からなる群から選択される構成要素を含む、請求項1に記載のシステム。
- 前記第1デバイスおよび前記第2デバイスのうちの少なくとも一方が小型スティミュレータである、請求項1に記載のシステム。
- 前記第1デバイスおよび前記第2デバイスのうちの少なくとも一方が送信機および受信機を含む、請求項1に記載のシステム。
- 身体に対するリハビリテーション治療の効果を特徴付けるように構成されるシステムであって、
a.身体の第1位置に結合されるように構成される送信機と、
b.該身体に結合されるように構成される複数の受信機であって、該複数の受信機の各々が、複数の距離のうちの1つの距離で該送信機から離れている該身体の異なる位置に結合されるように構成される、複数の受信機と、
c.該複数の受信機と通信するように構成される外部デバイスと、
を具備し、
d.
i.該送信機が、無線信号を送信するように構成され、
ii.該複数の受信機の各々が、該無線信号を検出し、該検出された無線信号に基づいてデータを生成し、該データを該外部デバイスに通信するように構成され、
iii.該外部デバイスが、該データに基づいて該複数の受信機と該送信機との間の該複数の距離を計算するように構成され、
iv.該複数の距離が、該身体に対する該リハビリテーション治療の該効果を特徴付けるために使用される、システム。 - 前記送信機と前記複数の受信機のうちの少なくとも1つのデバイスが、
a.該少なくとも1つのデバイスを前記身体内に埋め込むことと、
b.該少なくとも1つのデバイスを、接着剤、衣服片、ストラップ、ベルト、クリップおよび時計からなる群から選択される結合器具を使用して該身体に取り付けることと、
からなる群から選択される方法を介して、該身体に結合されるように構成される、請求項15に記載のシステム。 - 前記無線信号が、磁界、低周波数磁界、音波および超音波からなる群から選択される、請求項15に記載のシステム。
- a.前記無線信号が超音波であり、
b.前記外部デバイスが、該超音波の振幅と、該超音波の位相と、該超音波の伝播時間と、からなる群から選択される、前記複数の受信機によって検出される該超音波の特徴に基づいて、前記複数の距離を計算するように構成される、請求項15に記載のシステム。 - 前記外部デバイスが、前記データに基づいて前記複数の受信機と前記送信機との間の複数の方向角を計算するように構成される、請求項15に記載のシステム。
- 距離センサ、角度センサ、加速度センサ、振動センサおよびビデオカメラからなる群から選択される追加のデバイスをさらに具備し、該追加のデバイスが、前記外部デバイスに結合され、前記複数の距離および前記複数の方向角の前記計算を支援するように構成される、請求項19に記載のシステム。
- 前記外部デバイスが、前記データに基づいて、前記複数の受信機の各々の前記送信機に対する速度と、該複数の受信機の各々の該送信機に対する加速度と、からなる群から選択されるパラメータを計算するように構成される、請求項15に記載のシステム。
- a.前記身体が、健康な四肢と、対応する障害のある四肢とを含み、
b.前記複数の受信機のうちの1つが、該健康な四肢に結合されるように構成され、
c.該複数の受信機のうちの別のものが、該障害のある四肢に結合されるように構成され、
d.前記外部デバイスが、該複数の受信機のうちの該1つと前記送信機と間の距離を、該複数の受信機のうちの該別のものと該送信機との間の距離と比較するように構成される、請求項15に記載のシステム。 - 身体に対するリハビリテーション治療の効果を特徴付ける方法であって、
a.該身体の第1位置に結合されるように構成され、無線信号を送信するように構成される第1デバイスを提供するステップと、
b.該身体の第2位置に結合されるように構成され、該無線信号を検出するように構成される第2デバイスを提供するステップと、
c.該第1デバイスを使用して該無線信号を送信するステップと、
d.該第2デバイスを使用して該無線信号を検出するステップと、
e.該第2デバイスによって検出される該無線信号に基づいて該第1デバイスと該第2デバイスとの間の距離を計算するステップと、
f.該距離を使用して該身体に対する該リハビリテーション治療の該効果を特徴づけるステップと、
を含む、方法。 - a.前記第2デバイスと通信するように構成される外部デバイスを提供するステップと、
b.前記第2デバイスを使用して前記検出された無線信号に基づいてデータを生成するステップと、
c.前記第2デバイスを使用して該外部デバイスに該データを通信するステップと、
d.該外部デバイスを使用して該データに基づいて前記距離を計算するステップと、
を含む、請求項23に記載の方法。 - 前記外部デバイスを使用して、前記データに基づいて前記第1デバイスと前記第2デバイスとの間の方向角を計算するステップをさらに含む、請求項24に記載の方法。
- 前記外部デバイスを使用して、前記データに基づいて、前記第1デバイスに対する前記第2デバイスの速度と、該第1デバイスに対する該第2デバイスの加速度と、からなる群から選択されるパラメータを計算するステップをさらに含む、請求項24に記載の方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US67291505P | 2005-04-18 | 2005-04-18 | |
| PCT/US2006/014455 WO2006113654A1 (en) | 2005-04-18 | 2006-04-17 | System and related method for determining a measurement between locations on a body |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008536583A true JP2008536583A (ja) | 2008-09-11 |
| JP2008536583A5 JP2008536583A5 (ja) | 2009-01-22 |
Family
ID=36678628
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008506814A Pending JP2008536583A (ja) | 2005-04-18 | 2006-04-17 | 身体の位置間の寸法を確定するシステムおよび関連方法 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US20080319349A1 (ja) |
| EP (1) | EP1871228A1 (ja) |
| JP (1) | JP2008536583A (ja) |
| AU (1) | AU2006236428A1 (ja) |
| CA (1) | CA2605016A1 (ja) |
| MX (1) | MX2007013000A (ja) |
| WO (1) | WO2006113654A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017505908A (ja) * | 2013-10-20 | 2017-02-23 | オアフ グループ,リミティド ライアビリティ カンパニー | 物体の動作判定方法及びシステム |
Families Citing this family (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1706178B1 (en) | 2004-01-22 | 2013-04-24 | Rehabtronics Inc. | System for routing electrical current to bodily tissues via implanted passive conductors |
| CA2608397A1 (en) | 2005-06-28 | 2007-01-04 | Bioness Development, Llc | Improvements to an implant, system and method using implanted passive conductors for routing electrical current |
| US7632239B2 (en) * | 2005-11-16 | 2009-12-15 | Bioness Neuromodulation Ltd. | Sensor device for gait enhancement |
| US7899556B2 (en) | 2005-11-16 | 2011-03-01 | Bioness Neuromodulation Ltd. | Orthosis for a gait modulation system |
| US8972017B2 (en) | 2005-11-16 | 2015-03-03 | Bioness Neuromodulation Ltd. | Gait modulation system and method |
| US8209022B2 (en) | 2005-11-16 | 2012-06-26 | Bioness Neuromodulation Ltd. | Gait modulation system and method |
| JP5324438B2 (ja) | 2006-05-01 | 2013-10-23 | バイオネス ニューロモジュレイション リミテッド | 改良型機能的電気刺激システム |
| US8483820B2 (en) | 2006-10-05 | 2013-07-09 | Bioness Inc. | System and method for percutaneous delivery of electrical stimulation to a target body tissue |
| US11136234B2 (en) | 2007-08-15 | 2021-10-05 | Bright Cloud International Corporation | Rehabilitation systems and methods |
| US20090131225A1 (en) * | 2007-08-15 | 2009-05-21 | Burdea Grigore C | Rehabilitation systems and methods |
| US9757554B2 (en) | 2007-08-23 | 2017-09-12 | Bioness Inc. | System for transmitting electrical current to a bodily tissue |
| EP2180918B1 (en) | 2007-08-23 | 2017-07-12 | Bioness Inc. | Electrodes with a power source and with connectors for coupling to an external stimulator |
| US8738137B2 (en) | 2007-08-23 | 2014-05-27 | Bioness Inc. | System for transmitting electrical current to a bodily tissue |
| US20090326602A1 (en) * | 2008-06-27 | 2009-12-31 | Arkady Glukhovsky | Treatment of indications using electrical stimulation |
| US20120116252A1 (en) * | 2010-10-13 | 2012-05-10 | The Regents Of The University Of Colorado, A Body Corporate | Systems and methods for detecting body orientation or posture |
| US9381364B2 (en) * | 2010-10-18 | 2016-07-05 | Boston Scientific Neuromodulation Corporation | Telemetry optimization in an implantable medical device system to achieve equal and maximal distances in bidirectional communications |
| US9025824B2 (en) | 2010-12-07 | 2015-05-05 | Movement Training Systems Llc | Systems and methods for evaluating physical performance |
| CN104395951B (zh) * | 2012-05-16 | 2017-11-07 | 皇家飞利浦有限公司 | 用于罹患上肢机能障碍的人员的训练服装 |
| BR112014028389A2 (pt) * | 2012-05-16 | 2017-06-27 | Koninklijke Philips Nv | vestimenta de treinamento para rastrear movimentos em treinamento de reabilitação para pessoas que sofrem de distúrbios dos membros superiores |
| US9214077B2 (en) * | 2012-10-08 | 2015-12-15 | Location Labs, Inc. | Bio-powered locator device |
| GB2527460B (en) * | 2013-03-15 | 2018-02-14 | Movement Training Systems Llc | Systems and methods for evaluating physical performance |
| DK178061B1 (en) * | 2013-10-07 | 2015-04-20 | Bang & Olufsen As | A multimedia controller |
| US9867985B2 (en) | 2014-03-24 | 2018-01-16 | Bioness Inc. | Systems and apparatus for gait modulation and methods of use |
| CN107847187B (zh) * | 2015-07-07 | 2021-08-17 | 皇家飞利浦有限公司 | 用于对肢体的至少部分进行运动跟踪的装置和方法 |
| AU2017206723B2 (en) | 2016-01-11 | 2021-11-25 | Bioness Inc. | Systems and apparatus for gait modulation and methods of use |
| CN108089699B (zh) * | 2016-11-21 | 2020-10-30 | 宏达国际电子股份有限公司 | 人体姿势侦测系统、服装以及方法 |
| TWI613621B (zh) * | 2016-12-08 | 2018-02-01 | 財團法人工業技術研究院 | 姿勢感測裝置及其方法 |
| CN107741196B (zh) * | 2017-12-04 | 2019-11-12 | 成都思悟革科技有限公司 | 一种人体姿态获得方法及系统 |
| EP3664526A1 (en) | 2018-12-05 | 2020-06-10 | Koninklijke Philips N.V. | A method for device synchronization |
| US11273288B2 (en) * | 2019-04-08 | 2022-03-15 | Avent, Inc. | System and method for medical device position guidance |
| US20200397345A1 (en) * | 2019-06-19 | 2020-12-24 | University Of Southern California | Human activity recognition using magnetic induction-based motion signals and deep recurrent neural networks |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11192214A (ja) * | 1998-01-05 | 1999-07-21 | Sony Corp | 脊椎動物若しくはこれを模倣したロボットに関する数値モデルの作成方法 |
| JP2001513679A (ja) * | 1997-02-26 | 2001-09-04 | アルフレッド イー マン ファウンデーション フォア サイエンティフィック リサーチ | バッテリ給電式の患者の皮下挿入器具 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6164284A (en) * | 1997-02-26 | 2000-12-26 | Schulman; Joseph H. | System of implantable devices for monitoring and/or affecting body parameters |
| AU7161598A (en) * | 1997-04-21 | 1998-11-13 | Virtual Technologies, Inc. | Goniometer-based body-tracking device and method |
| DE19830359A1 (de) * | 1998-07-07 | 2000-01-20 | Helge Zwosta | Räumliche Lage- und Bewegungsbestimmung von Körperteilen und Körpern, mittels einer Kombination von inertialen Orientierungs-Meßaufnehmern und Positionserfassungssensoriken |
| AU3206900A (en) * | 1998-12-31 | 2000-07-31 | Ball Semiconductor Inc. | Position sensing system |
| US6233476B1 (en) * | 1999-05-18 | 2001-05-15 | Mediguide Ltd. | Medical positioning system |
| US6651352B2 (en) * | 2002-01-04 | 2003-11-25 | Liberty Mutual | Wrist motion measurement device |
| EP2064992A2 (en) * | 2003-08-22 | 2009-06-03 | Alfred E. Mann Foundation for Scientific Research | A system for determining relative distance(s) and/or angle(s) between at least two points |
-
2006
- 2006-04-17 JP JP2008506814A patent/JP2008536583A/ja active Pending
- 2006-04-17 CA CA002605016A patent/CA2605016A1/en not_active Abandoned
- 2006-04-17 AU AU2006236428A patent/AU2006236428A1/en not_active Abandoned
- 2006-04-17 MX MX2007013000A patent/MX2007013000A/es not_active Application Discontinuation
- 2006-04-17 EP EP06750483A patent/EP1871228A1/en not_active Withdrawn
- 2006-04-17 WO PCT/US2006/014455 patent/WO2006113654A1/en active Application Filing
- 2006-04-17 US US11/911,882 patent/US20080319349A1/en not_active Abandoned
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001513679A (ja) * | 1997-02-26 | 2001-09-04 | アルフレッド イー マン ファウンデーション フォア サイエンティフィック リサーチ | バッテリ給電式の患者の皮下挿入器具 |
| JPH11192214A (ja) * | 1998-01-05 | 1999-07-21 | Sony Corp | 脊椎動物若しくはこれを模倣したロボットに関する数値モデルの作成方法 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017505908A (ja) * | 2013-10-20 | 2017-02-23 | オアフ グループ,リミティド ライアビリティ カンパニー | 物体の動作判定方法及びシステム |
Also Published As
| Publication number | Publication date |
|---|---|
| MX2007013000A (es) | 2008-03-18 |
| EP1871228A1 (en) | 2008-01-02 |
| AU2006236428A1 (en) | 2006-10-26 |
| WO2006113654A1 (en) | 2006-10-26 |
| CA2605016A1 (en) | 2006-10-26 |
| US20080319349A1 (en) | 2008-12-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2008536583A (ja) | 身体の位置間の寸法を確定するシステムおよび関連方法 | |
| Roetenberg et al. | Ambulatory position and orientation tracking fusing magnetic and inertial sensing | |
| US6866643B2 (en) | Determination of finger position | |
| CN102567638B (zh) | 一种基于微型传感器的交互式上肢康复系统 | |
| EP3324204B1 (en) | Body posture detection system, suit and method | |
| CN101028188B (zh) | 定位跟踪的方法和系统 | |
| JP7391054B2 (ja) | オンボディセンサシステムおよび方法 | |
| US5433201A (en) | Method and apparatus for stimulation of posture | |
| CN107115114A (zh) | 人体运动能力评价方法、装置及系统 | |
| EP1970005A1 (en) | A system and a method for motion tracking using a calibration unit | |
| CN106527738A (zh) | 一种用于虚拟现实系统的多信息体感交互手套系统及方法 | |
| EP3270781A1 (en) | Method and device for anatomical angle measurement | |
| WO2016029138A1 (en) | Systems and methods for joint activity monitoring | |
| KR20170058208A (ko) | 상지 재활훈련 장치 및 방법 | |
| AU2020233670B2 (en) | Intraoperative magnetometry monitoring system | |
| EP0865262B1 (en) | Device for control of prostheses and other assistance devices | |
| CN116108873B (zh) | 基于rfid/imu融合的运动姿势评估系统 | |
| CN101568303A (zh) | 用于家庭康复的传感器装置 | |
| EP3395246A1 (en) | Systems and methods for determining magnetic location of wireless tools | |
| Dalvi et al. | Posture Monitoring Apparatus For Physiotherapy | |
| CN206534641U (zh) | 外骨骼服和躯体仿真系统 | |
| US11832934B1 (en) | Joint monitoring | |
| Cognolato | Experimental validation of Xsens inertial sensors during clinical and sport motion capture applications | |
| JP2022544273A (ja) | 位置の測定および遠隔支援によって歩行を支援する装置 | |
| Moiz | Design and validation of wearable wireless sensors |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081127 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20081127 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20090326 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20090326 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110422 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20110927 |