JP2007265377A - Driver state determining device and driving support device - Google Patents
Driver state determining device and driving support device Download PDFInfo
- Publication number
- JP2007265377A JP2007265377A JP2006276353A JP2006276353A JP2007265377A JP 2007265377 A JP2007265377 A JP 2007265377A JP 2006276353 A JP2006276353 A JP 2006276353A JP 2006276353 A JP2006276353 A JP 2006276353A JP 2007265377 A JP2007265377 A JP 2007265377A
- Authority
- JP
- Japan
- Prior art keywords
- driver
- information
- vehicle
- driving
- state
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images












Landscapes
- Fittings On The Vehicle Exterior For Carrying Loads, And Devices For Holding Or Mounting Articles (AREA)
- Air-Conditioning For Vehicles (AREA)
- Traffic Control Systems (AREA)
Abstract
Description
本発明は、運転者状態判定装置及び運転支援装置にかかり、特に、運転者に関する指標を用いて運転者状態を判定する運転者状態判定装置、及びこの運転者状態判定装置を利用した運転支援装置に関する。 The present invention relates to a driver state determination device and a driving support device, and in particular, a driver state determination device that determines a driver state using an index related to the driver, and a driving support device that uses the driver state determination device. About.
運転者の不注意な状態を判定する従来技術として、ハンドル静止段階とハンドル静止段階に続くやや慌しいハンドル操作を識別し、不注意の重大度を判断する技術(例えば、特許文献1)や、動作パラメータ(操舵角、アクセルペダル位置、ブレーキペダル位置、運転者の着座状態、及び姿勢の少なくとも1つを含むパラメータ)から、運転者の不注意さの度合いを検出する技術(例えば、特許文献2)等が知られている。 As a conventional technique for determining an inattentive state of a driver, a technique (for example, Patent Document 1) for discriminating the degree of carelessness by discriminating a slight steering operation following the steering wheel stationary stage and the stationary steering stage, and operation Technology for detecting the degree of driver's carelessness from parameters (parameters including at least one of steering angle, accelerator pedal position, brake pedal position, driver's sitting state, and posture) (for example, Patent Document 2) Etc. are known.
また、注意に関わる運転者状態を判定する従来技術としては、運転者の視線方向の頻度と運転操作量とを検出して運転者状態(車線の維持運転状態、漫然運転状態、わき見運転状態、及び車線変更の意図を示す運転状態の少なくとも1つの状態)を検出する技術が知られている(例えば、特許文献3)。 In addition, as a conventional technique for determining the driver state related to attention, the driver state (lane maintaining driving state, random driving state, side-by-side driving state, And at least one driving state indicating the intention of changing lanes) is known (for example, Patent Document 3).
また、居眠り運転状態を目の開閉状態や操舵状態を用いて検出して警報を発し、警報を発してから警報を停止するまでの警報作動時間の長さに基づいて居眠り運転判定方法を変更する手段を備えた居眠り運転警報装置も知られている(例えば、特許文献4)。 Also, change the dozing operation determination method based on the length of the alarm operation time from when the alarm is issued until the alarm is stopped after detecting the dozing operation state using the eye open / closed state or steering state A drowsiness driving alarm device provided with means is also known (for example, Patent Document 4).
さらにまた、運転者の状態を視線方向、顔向きおよび顔の位置により判定し、判定結果をもとに、注意もしくは覚醒を促す警告覚醒処理手段を備えた車両制御装置も知られている(例えば、特許文献5)。 Furthermore, a vehicle control device is also known that includes a warning / awakening processing unit that determines a driver's state based on a line-of-sight direction, a face orientation, and a face position, and prompts attention or arousal based on the determination result (for example, Patent Document 5).
ところで、安全運転に大きく関わる運転者状態において不適切な状態としては、覚醒低下による注意レベルの低下、運転への注意集中不足、及び運転能力低下がある。特許文献1の技術は、この不適切な状態のうち疲労及び覚醒低下による注意レベルの低下を対象とし、特許文献2はこの不適切な状態のうち運転への注意集中不足を対象としている。
By the way, as an unsuitable state in the driver state largely related to safe driving, there are a reduction in attention level due to a decrease in alertness, a lack of attention concentration on driving, and a reduction in driving ability. The technique of
注意レベルの低下と注意集中不足とを比較すると、疲労及び覚醒低下による注意レベルの低下と、運転以外の操作及びわき見等による運転への注意集中不足とは異なる現象であり、必要な運転支援も異なると考えられるため、注意レベルの低下と注意集中不足とを区別して判定することが望ましい。
しかしながら、上記の特許文献1及び特許文献2の技術は、ハンドル操作、アクセルペダル、及びブレーキペダルの各操作を指標として不注意な状態を検出しており、これらの指標は運転操作に関わるものであることから、走行状態(車速、交通量、道路形状等)によって変化するため、これらの指標のみで不注意状態を判定するのは困難である。このため運転操作に依存しない指標を用いることが望まれる。
However, the techniques of
また、上記特許文献3の技術は、視線方向及びステアリング操作量を指標として検出することにより、漫然運転及びわき見運転等の不注意状態を判定する技術であるが、これらの指標は特許文献1及び特許文献2の各技術と同様に、運転操作に関わるものであり、走行状態によって変化するため、これらの指標のみで不注意状態を判定するのは困難である。このため運転操作に依存しない指標を用いるかまたは併用することが望まれる。
Further, the technique of Patent Document 3 is a technique for determining an inattentive state such as an abrupt driving and a side-by-side driving by detecting a gaze direction and a steering operation amount as an index. Like each technique of
上記特許文献4の技術では、警報を発してから警報を停止するまでの警報作動時間の長さに基づいて居眠り運転判定方法を変更しているが、居眠り運転判定基準を変更(適正化)するために実施する警報そのものがわずらわしく感じられる可能性があり、居眠り運転状態の判定方法変更の手段として不適切である。 In the technique of Patent Document 4 described above, the dozing operation determination method is changed based on the length of the alarm operation time from when the alarm is issued until the alarm is stopped, but the dozing operation determination criterion is changed (optimized). For this reason, there is a possibility that the alarm itself will be annoying, and it is inappropriate as a means for changing the method for determining the drowsy driving state.
また、上記特許文献5の技術では、わき見や居眠り状態を検出し、その持続時間により警告手段や覚醒手段を決定して実施するものであるが、居眠り状態は軽度の覚醒低下から大幅な覚醒低下まで程度の違いがあり、一様ではない。また居眠り状態の持続時間と覚醒低下の程度あるいは運転能力低下は必ずしも一致するわけではない。このため居眠り状態の持続時間だけで状態を区別したり、危険度を判定したりして支援内容を決定するのでは、適切な支援(警告や覚醒)ができない可能性がある。
Moreover, in the technique of the above-mentioned
本発明は、上記の問題を解消するためになされたもので、安全運転に大きく関わる運転者状態を覚醒度、注意集中度、及び運転能力の3つの要素に分けて、各々の要素を反映する少なくとも2つの運転者情報を検出し、検出した運転者情報の組み合わせに基づいて運転者状態を判定することにより、運転者状態をより詳細に判別できるようにした運転者状態判定装置を提供することを第1の目的とする。 The present invention has been made to solve the above-described problems, and the driver state that is largely involved in safe driving is divided into three elements of arousal level, attention concentration level, and driving ability, and each element is reflected. To provide a driver state determination device capable of detecting a driver state in more detail by detecting at least two pieces of driver information and determining a driver state based on a combination of the detected driver information. Is the first purpose.
また、本発明は、上記の運転者状態判定装置を利用して、より詳細に判別した運転者状態を用いて運転支援を行うようにした運転支援装置を提供することを第2の目的とする。 In addition, a second object of the present invention is to provide a driving support device that performs driving support using the driver state determined in more detail using the above-described driver state determination device. .
上記第1の目的を達成するために本発明は、覚醒度を反映する運転者情報、注意集中度を反映する運転者情報、及び運転能力を反映する運転者情報の中から選択された少なくとも2つの運転者情報を検出する運転者情報検出手段と、前記運転者情報検出手段で検出された各運転者情報の運転者個人の平均値及び標準偏差を記憶する運転者情報データベースと、車両運転状態または外部環境状態を示す車両・運転環境情報を検出する車両・運転環境情報検出手段と、前記運転者情報データベースに記憶された運転者個人の平均値及び標準偏差と、前記車両・運転環境情報検出手段で検出された車両・運転環境情報とに基づいて、運転者状態を判定するための運転者状態判定閾値を決定する判定閾値決定手段と、前記運転者情報検出手段で検出された各運転者情報、及び前記判定閾値決定手段で決定された運転者状態判定閾値に基づいて、運転者状態を判定する運転者状態判定手段と、を含んで構成されている。 In order to achieve the first object, the present invention provides at least two selected from driver information reflecting arousal level, driver information reflecting attention concentration level, and driver information reflecting driving ability. Driver information detecting means for detecting one driver information, a driver information database for storing an average value and a standard deviation of each driver information detected by the driver information detecting means, and a vehicle driving state Alternatively, vehicle / driving environment information detection means for detecting vehicle / driving environment information indicating an external environment state, average values and standard deviations of individual drivers stored in the driver information database, and the vehicle / driving environment information detection Based on the vehicle / driving environment information detected by the means, a determination threshold value determining means for determining a driver state determination threshold value for determining the driver state, and detected by the driver information detection means. Each driver information, and based on the determined driver condition determination threshold by the determination threshold value determining unit is configured to include a determining impaired operation determination means for impaired operation, the.
本発明では運転者状態を覚醒度、注意集中度、及び運転能力の3つの要素にわけ、少なくとも2つの要素を反映する運転者情報を検出し、検出した各運転者情報の運転者個人の平均値及び標準偏差と、車両・運転環境情報とに基づいて、運転者状態を判定するための運転者状態判定閾値を決定する。そして、検出された各運転者情報、及び決定された運転者状態判定閾値に基づいて、運転者状態を判定する。 In the present invention, the driver state is divided into three elements of the arousal level, the attention concentration level, and the driving ability, driver information reflecting at least two elements is detected, and the average of each detected driver information of the individual driver is detected. A driver state determination threshold value for determining the driver state is determined based on the value and the standard deviation and the vehicle / driving environment information. Then, the driver state is determined based on each detected driver information and the determined driver state determination threshold value.
本発明では、覚醒度、注意集中度及び運転能力の各々の要素を反映する運転者情報の組合せに基づいて運転者状態を判別しているので、運転者状態を詳細に判別することができる。すなわち、本発明では、従来技術が主な対象としている集中状態、及び居眠り状態の他に、例えば、漫然状態(覚醒しているが注意集中が低い状態)、及び眠気と葛藤している状態(覚醒低下しているが注意集中が高い状態)を分離して判別することなどが可能となる。 In the present invention, since the driver state is determined based on the combination of the driver information reflecting each element of the arousal level, the attention concentration level, and the driving ability, the driver state can be determined in detail. That is, in the present invention, in addition to the concentrated state and the dozing state, which are the main targets of the prior art, for example, the state of abusiveness (a state of arousal but low attention concentration) and a state of conflict with sleepiness ( It is possible to separate and discriminate the state of low arousal but high attention concentration.
本発明では、覚醒度を反映する運転者情報は、運転操作に依存しない指標として、脳波、心拍状態、開眼時に対して一定以上眼を閉じている時間の割合を表す閉眼時間割合、顔部画像の顔表情情報より計測され眠気状態を表す顔表情眠気値、及び運転者が申告した自己申告眠気値の少なくとも1つを用いることができる。 In the present invention, the driver information that reflects the degree of arousal includes, as an index that does not depend on the driving operation, an electroencephalogram, a heartbeat state, an eye-closed time ratio that represents a ratio of a time during which the eyes are closed more than a certain amount, and a face image It is possible to use at least one of a facial expression sleepiness value that is measured from the facial expression information of the facial expression and represents a sleepiness state, and a self-reported sleepiness value reported by the driver.
また、注意集中度を反映する運転者情報は、頭部加速度、頭部画像、及び頚部筋電図の少なくとも1つにより計測された運転者の頭部動揺量より得られる頭部振動伝達率と、視線の方向により計測される運転者の注意集中対象(運転か運転以外かを区別することができる)との少なくとも一方を用いることができる。この注意集中対象情報を加えると、より細かく運転者状態を判別することができる。 The driver information reflecting the attention concentration is a head vibration transmissibility obtained from a driver's head shaking measured by at least one of head acceleration, head image, and neck electromyogram. At least one of the driver's attention concentration target (which can be distinguished between driving and non-driving) measured by the direction of the line of sight can be used. When this attention concentration target information is added, the driver state can be determined more finely.
また、運転能力を反映する運転者情報は、基準操舵量と操舵量とにより求められる低周波数操舵量、アクセルペダル操作量、ブレーキペダル操作量、車線幅方向の車両位置の変動を示す車両ふらつき度、及び前車との車間距離維持のためのアクセルペダル操作量またはブレーキペダル操作量の少なくとも1つを用いることができる。なお、低周波数操舵量としては、走行状態(特に速度及び道路形状)の影響を小さくするために2つの周波数帯域の比を指標にすることができ、例えば、基準操舵量と操舵量との比の自然対数により求められる低周波数操舵量比を用いることができる。 In addition, the driver information reflecting the driving ability includes the low-frequency steering amount obtained from the reference steering amount and the steering amount, the accelerator pedal operation amount, the brake pedal operation amount, and the vehicle wobble degree indicating the fluctuation of the vehicle position in the lane width direction. , And at least one of an accelerator pedal operation amount and a brake pedal operation amount for maintaining the inter-vehicle distance from the preceding vehicle can be used. As the low frequency steering amount, the ratio of the two frequency bands can be used as an index in order to reduce the influence of the running state (especially speed and road shape). For example, the ratio between the reference steering amount and the steering amount A low-frequency steering amount ratio obtained from the natural logarithm of can be used.
本発明では、覚醒度を反映する運転者情報として閉眼時間割合を用いると共に注意集中度を反映する運転者情報として頭部振動伝達率を用いるか、または、覚醒度を反映する運転者情報として閉眼時間割合を用いると共に注意集中度を反映する運転者情報として頭部振動伝達率及び視対象割合を用いると効果的である。 In the present invention, the closed eye ratio is used as the driver information reflecting the arousal level and the head vibration transmission rate is used as the driver information reflecting the attention concentration level, or the closed eye is used as the driver information reflecting the arousal level. It is effective to use the head vibration transmissibility and the visual target ratio as the driver information that reflects the degree of attention concentration while using the time ratio.
さらにまた、本発明では、覚醒度を反映する運転者情報として閉眼時間割合を用いると共に、運転能力を反映する運転者情報として低周波数操舵量を用いると効果的である。また、注意集中度を反映する運転者情報として頭部振動伝達率を用いると共に、運転能力を反映する運転者情報として車両ふらつき度を用いると効果的である。 Furthermore, in the present invention, it is effective to use the eye-closed time ratio as the driver information that reflects the degree of arousal and to use the low frequency steering amount as the driver information that reflects the driving ability. Further, it is effective to use the head vibration transmissibility as the driver information that reflects the degree of attention concentration, and to use the vehicle wobble degree as the driver information that reflects the driving ability.
また、各運転者情報の運転者個人の平均値及び標準偏差と車両・運転環境情報とに基づいて決定した運転者状態判定閾値を用いて運転者状態を判定することにより、運転者個人に適合した運転者状態を判定することができる。運転者状態判定閾値は、車両・運転環境情報に応じて決定されているので、車両・運転環境に応じた運転者状態の判定を行うことできる。 In addition, the driver's condition is determined by using the driver condition determination threshold determined based on the average value and standard deviation of each driver information and the vehicle / driving environment information. The driver state can be determined. Since the driver state determination threshold is determined according to the vehicle / driving environment information, the driver state can be determined according to the vehicle / driving environment.
更に、本発明では検出した運転者個人の運転者情報データを蓄積し、これに基づいて演算した運転者状態判定閾値を用いているので、運転者個人の運転者情報データのレベル(平均値)や変動(標準偏差)に適合した運転者状態の判定を行うことができる。 Further, in the present invention, since the detected driver information data of the individual driver is used and the driver state determination threshold calculated based on this is used, the level (average value) of the driver information data of the individual driver is used. It is possible to determine the driver's condition that is suitable for or variation (standard deviation).
上記のように本発明の運転者状態判定装置によれば、運転者個人に適合すると共に、車両・運転環境に対応した的確な運転者状態の判定を行うことができる。 As described above, according to the driver state determination apparatus of the present invention, it is possible to determine the exact driver state corresponding to the vehicle and the driving environment while being suitable for the individual driver.
また、上記第2の目的を達成するために本発明の運転支援装置は、上記運転者状態判定装置と、前記運転者状態判定手段で判定された運転者状態に応じた運転支援の種類及びタイミングで、運転支援手段を制御する運転支援制御手段と、を含んで構成されている。 In order to achieve the second object, the driving support device according to the present invention includes a driver status determination device and a type and timing of driving support according to the driver status determined by the driver status determination means. And driving support control means for controlling the driving support means.
本発明の運転支援装置によれば、上記のように判定された運転者状態に対応して運転支援制御を行うことにより、不注意状況に応じた最適な運転支援を実施できる。逆に、運転環境に応じた良好な運転者状態の時には警報の呈示を遅くすること等により、不必要な支援による煩わしさを低減できる。 According to the driving support device of the present invention, optimal driving support according to carelessness can be performed by performing driving support control corresponding to the driver state determined as described above. On the contrary, the troublesomeness caused by unnecessary assistance can be reduced by delaying the presentation of an alarm when the driver is in a good state according to the driving environment.
以上説明したように、本発明の運転者状態判定装置によれば、覚醒度を反映する運転者情報、注意集中度を反映する運転者情報、及び運転能力を反映する運転者情報の少なくとも2つの運転者情報に基づいて運転者状態を判定しているので、運転者状態をより詳細に判別することができる、という効果が得られる。 As described above, according to the driver state determination device of the present invention, at least two of the driver information reflecting the arousal level, the driver information reflecting the attention concentration level, and the driver information reflecting the driving ability. Since the driver state is determined based on the driver information, an effect that the driver state can be determined in more detail can be obtained.
また、本発明の運転支援装置によれば、より詳細に判別した運転者状態に応じた運転支援を行うことができる、という効果が得られる。 In addition, according to the driving support apparatus of the present invention, it is possible to obtain the effect that the driving support according to the driver state determined in more detail can be performed.
以下、本発明の実施の形態を詳細に説明する。本発明の第1の実施の形態には、図1に示すように、覚醒度と注意集中度とを各々反映する運転者の複数の運転者情報を検出する運転者情報検出器10が設けられている。本実施の形態では、運転者情報として、覚醒度と注意集中度とを各々反映する複数の運転者情報を用い、これらの複数の運転者情報の組合せに基づいて運転者状態を詳細に判定することができる。
Hereinafter, embodiments of the present invention will be described in detail. In the first embodiment of the present invention, as shown in FIG. 1, a
第1の実施の形態では、覚醒度を反映する運転者情報として、開眼時に対して一定以上眼を閉じている時間の割合を表す閉眼時間割合、注意集中度を反映する情報として、頭部動揺量より求まる頭部振動伝達率が各々用いられている。 In the first embodiment, as the driver information reflecting the degree of arousal, as the information that reflects the degree of attention closed and the degree of attention concentration, the head shaking The head vibration transmissibility obtained from the quantity is used.
このため、運転者情報検出器10は、図1に示すように、ドライバの頭部を顔面側から撮影するカメラ10A、カメラ10Aで撮影されたドライバの顔面画像から運転者の眼の閉眼時間を検出する閉眼時間検出器10B、カメラ10Aで撮影されたドライバの頭部画像から頭部加速度を頭部動揺量として検出する加速度検出器10C、及びシート尻下部の上下加速度を検出する加速度センサ10Dで構成されている。
For this reason, as shown in FIG. 1, the
また、車両運転状態もしくは外部環境状態を示す情報である車両・運転環境情報を検出する車両・運転環境情報検出器12が設けられている。
Further, a vehicle / driving
車両・運転環境情報としては、車速、車両加速度、車両角加速度、前車と自車との車間距離、自車の前方画像情報、天候、時刻、運転時間、及びカーナビゲーションからの道路情報(道路種別、及び交通量)の少なくとも1つを検出することができる。 Vehicle / driving environment information includes vehicle speed, vehicle acceleration, vehicle angular acceleration, distance between the front vehicle and the host vehicle, front image information of the host vehicle, weather, time, driving time, and road information from the car navigation (road At least one of type and traffic volume) can be detected.
運転者情報検出器10、及び車両・運転環境情報検出器12は、コンピュータで構成された制御回路16に接続されている。制御回路16には、運転者情報のデータ、このデータの平均値及び標準偏差等を記憶する運転者情報データベース14が接続されると共に、運転支援手段20が接続されている。
The
運転支援手段20としては、図1に示すように、音によって運転支援情報を呈示するスピーカ20A、画像等によって運転支援情報を呈示するカーナビゲーション等の情報呈示装置20B、シートベルト18を巻き取るリトラクタ(図示省略)を制御してシートベルト18の張力を制御するシートベルト張力制御装置20C、香りやマイナスイオンを発生させたり、酸素を出したり、車内の温度を調整する空調装置20D、及びシート尻下部に設けられシートを振動させるシート振動装置20Eが設けられている。また、制動力制御や操舵反力制御など車両運動制御を行う制御部(図示省略)を設け、運転能力低下時に制動力を上げるなど、運転能力低下を補うようにすることもできる。運転支援手段20としては、これらの少なくとも1つを設ければよい。
As shown in FIG. 1, the driving support means 20 includes a
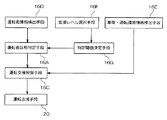
制御回路16には種々の機能を実現するプログラムが記憶されており、制御回路で実現する機能を機能ブロック図で表すと、図2に示すように、運転者情報検出器10で検出されたデータに基づいて運転者情報を検出する運転者情報検出手段16D、車両・運転環境情報検出器12で検出されたデータに基づいて車両・運転環境情報を検出する車両・運転環境情報検出手段16E、運転者情報検出手段16Dで検出された運転者情報に基づいて運転者状態を判定する運転者状態判定手段16A、運転者情報データベース14に格納された情報と車両・運転環境情報検出手段16Eで検出された情報とに基づいて、判定閾値を決定する判定閾値決定手段16B、及び運転支援手段20を制御する運転支援制御手段16Cで表すことができる。
A program for realizing various functions is stored in the
以下、本実施の形態の制御回路におけるプログラムに従った制御について説明する。 Hereinafter, control according to the program in the control circuit of the present embodiment will be described.
運転者情報検出手段16Dでは、運転者情報検出器10で検出されたデータに基づいて、図3に示す運転者の閉眼時間割合X(t)及び頭部振動伝達率Y(t)を検出し、運転者状態判定手段16Aに出力する。また、検出された閉眼時間割合X(t)及び頭部振動伝達率Y(t)を運転者を示す識別情報に対応させて運転者情報データベース14に蓄積すると共に、検出された情報及び蓄積された情報を用いて、運転者個人のレベル(平均値)及び変動(標準偏差)を演算し、蓄積された情報を更新する。
The driver information detection means 16D detects the driver's eye-closing time ratio X (t) and head vibration transmission rate Y (t) shown in FIG. 3 based on the data detected by the
ここで、閉眼時間割合X(t)は、開眼時に対して一定以上(例えば、80%以上)眼を閉じている時間の割合であり、図3に示すように、X(t)のレベルが高いほど眠気(覚醒低下)が大きいことを表している。 Here, the eye closing time ratio X (t) is the ratio of the time during which the eyes are closed at a certain level or more (for example, 80% or more) with respect to the time when the eyes are opened, and the level of X (t) is as shown in FIG. The higher the value, the greater the drowsiness (decreased arousal).
頭部振動伝達率Y(t)は、運転者の頭部動揺量のうち上下加速度において運転者に応じて決定された周波数帯域における加速度αhと、シート尻下部の上下加速度において加速度αhと同じ周波数帯域における加速度αsとから下記(1)式に示すように、加速度αsに対する加速度αhの比の自然対数より求められる。図3に示すように、頭部振動伝達率Y(t)のレベルが高いほど注意集中度が低い(視認の深さが浅い)ことを表している。 Head vibration transmissibility Y (t) is the acceleration alpha h in a frequency band which is determined according to the driver in the vertical acceleration of the head shaking amount of the driver, and the acceleration alpha h in the vertical acceleration of the lower sheet ass From the acceleration α s in the same frequency band, it is obtained from the natural logarithm of the ratio of the acceleration α h to the acceleration α s as shown in the following equation (1). As shown in FIG. 3, the higher the level of head vibration transmission rate Y (t) is, the lower the attention concentration is (the depth of visual recognition is shallow).
Y(t)=ln(αh(t))−ln(αs(t)) …(1)
運転者情報データベースでは、運転者情報検出器10から入力された運転者情報データを、運転者個人のレベル(平均値)及び変動(標準偏差)のデータと共に記録し、記録された運転者個人のレベル(平均値)及び変動(標準偏差)のデータが更新される。
Y (t) = ln (α h (t)) − ln (α s (t)) (1)
In the driver information database, the driver information data input from the
運転者情報データベースの記録、更新された平均値(Xmean、Ymean)及び標準偏差(XSD、YSD)の各データは、判定閾値決定手段16Bにより読み出され、判定閾値の決定に使用される。また、判定閾値決定手段16Bには、車両・運転環境情報検出手段16Eで検出された車速、前車との車間距離、及びカーナビゲーションからの道路情報(道路種別)等の車両・運転環境情報が入力される。 The data of the driver information database, the updated average values (X mean , Y mean ) and standard deviation (X SD , Y SD ) are read by the determination threshold value determination means 16B and used for determination threshold value determination. Is done. Further, the determination threshold value determining means 16B includes vehicle / driving environment information such as the vehicle speed detected by the vehicle / driving environment information detecting means 16E, the inter-vehicle distance from the preceding vehicle, and road information (road type) from the car navigation. Entered.
判定閾値決定手段16Bでは、車両・運転環境情報検出器12から入力された車両・運転環境情報に基づいて、下記表1に従って基準判定閾値(Xth、Yth)を決定し、運転者情報データベース14から入力された運転者個人のレベル(平均値)及び変動(標準偏差)に基づき、基準判定閾値(Xth、Yth)を補正した補正値(Xth *、Yth *)を算出して運転者状態判定手段16Aに出力する。
Based on the vehicle / driving environment information input from the vehicle / driving

表1に示すように、基準判定閾値(Xth、Yth)は、市街地道路、自動車専用道路(交通量が多く、かつ車間距離が短い)、自動車専用道路(交通量が少なく、かつ車速が低い)、及び山岳道路等の車両・運転環境情報に応じて定められている。 As shown in Table 1, the reference determination threshold values (X th , Y th ) are urban roads, roads dedicated to automobiles (high traffic volume and short inter-vehicle distance), roads dedicated to automobiles (low traffic volume and vehicle speed). Low) and in accordance with vehicle / driving environment information such as mountain roads.
表1の基準判定閾値を定義した際の運転者情報の平均値をMX0、MY0、標準偏差をSDX0、SDY0とすると、平均値MX、MY、標準偏差SDX、SDYを有する運転者では運転者状態判定閾値は次のXth *、Yth *ように補正される。 When the average value of the driver information when defining the reference judgment threshold values in Table 1 is M X0 , M Y0 and the standard deviation is SD X0 , SD Y0 , the average values M X , M Y , standard deviations SD X , SD Y In the case of a driver having the above, the driver state determination threshold is corrected as follows: X th * , Y th * .
Xth *=MX+SDX/SDX0(Xth−MX0) …(2)
Yth *=MY+SDY/SDY0(Yth−MY0) …(3)
ここで、運転者状態判定閾値Xthは、平均値MX0と標準偏差SDX0とによりMX0よりもa×SDX0大きい値として次の(4)式のように表わされる。
X th * = M X + SD X / SD X0 (X th −M X0 ) (2)
Y th * = M Y + SD Y / SD Y0 (Y th -M Y0) ... (3)
Here, the driver state determination threshold value X th is expressed as a a × SD X0 larger than M X0 by the average value M X0 and the standard deviation SD X0 of the following equation (4).
Xth=MX0+aSDX0 …(4)
ただし、aは定数である。
X th = M X0 + aSD X0 (4)
However, a is a constant.
平均値MX、標準偏差SDXの運転者の判定閾値Xth *は、平均値MXと標準偏差SDXにより同様に以下の(5)式で表わされる。 Average value M X, the determination threshold value X th * is the driver of the standard deviation SD X, represented by the following equation (5) in the same manner by the mean value M X and the standard deviation SD X.
Xth *=MX+aSDX(aは定数)…(5)
ここで、aはXth、Xth *に共通の定数であり、(4)式よりa=1/SDX0(Xth−MX0)であるので、これを(5)式に代入すると上記(2)式が得られる。
X th * = M X + aSD X (a is a constant) (5)
Here, a is a constant common to X th and X th * , and a = 1 / SD X0 (X th −M X0 ) from the equation (4). Equation (2) is obtained.
また、(3)式も次の式から同様に求められる。 Also, the expression (3) can be similarly obtained from the following expression.
Yth=MY0+bSDY0、
Yth *=MY+bSDY
ただし、bは定数である。
Y th = M Y0 + bSD Y0 ,
Y th * = M Y + bSD Y
However, b is a constant.
運転者状態判定手段16Aでは、運転者情報検出手段16Dから入力されたデータX(t)及びY(t)を、判定閾値決定手段16Bから入力された運転者状態判定閾値補正値(Xth *、Yth *)と照合して図4に示すように運転者個人の運転者状態を判定し、運転支援制御手段16Cに出力する。
The driver
図4の判定閾値を個人に適合させて補正した値に基づいた判定は、下記表2の注意指標と運転者状態との関係から定められている。 The determination based on the value corrected by adapting the determination threshold value of FIG. 4 to an individual is determined from the relationship between the attention index and the driver state in Table 2 below.
眠気が低く、かつ注意集中度が低い場合は漫然状態と判断され、眠気が低く、かつ注意集中度が高い場合は集中状態と判断され、眠気が高く、かつ注意集中度が低い場合は居眠り状態と判断され、眠気が高く、かつ注意集中度が高い場合は眠気葛藤状態と判断される。このときの眠気が低いか高いかを判定する閾値、及び注意集中度が低いか高いかを判定する閾値は、図4に示すように判定閾値決定手段16Bで決定された補正値が用いられる。 When drowsiness is low and attention concentration is low, it is determined to be in a state of disorder. When drowsiness is low and attention concentration is high, it is determined as concentration. When sleepiness is high and attention concentration is low, it is determined to be dozing. If it is determined that sleepiness is high and the concentration of attention is high, it is determined that there is a drowsiness conflict state. As the threshold for determining whether sleepiness at this time is low or high and the threshold for determining whether the attention concentration is low or high, correction values determined by the determination threshold determination means 16B are used as shown in FIG.
運転支援制御手段16Cでは運転者状態判定手段16Aで判定された運転者状態に応じて、下記表3に示す運転者状態と運転支援制御例に従って最適な運転支援の種類、タイミングを決定し、運転支援手段20に出力する。運転支援手段20では、スピーカ20Aから危険警報を放音して呈示するか、情報呈示装置20Bに危険警報を表示する等によって呈示するか、またはスピーカ20Aから危険警報を放音すると共に情報呈示装置20Bに危険警報を呈示する。また、必要に応じて空調装置20Dを駆動する。
The driving
表3に示す運転支援制御例について説明する。居眠り状態と判定された場合は、危険情報の呈示を早めると共に休憩を勧める呈示を行い、眠気葛藤状態と判定された場合は、周辺危険情報の呈示を早めると共に覚醒のための香り(マイナスイオンと併用しても可)を呈示し、漫然状態と判定された場合は、前方危険警報の呈示を早めると共にリフレッシュのための香りを呈示し、集中状態と判定された場合には、危険警報の呈示を上記の場合より遅くする。 A driving support control example shown in Table 3 will be described. If it is determined to be dozing, it will prompt the presentation of danger information and recommend a break, and if it is determined to be drowsy conflict, it will accelerate the presentation of surrounding danger information and a scent for awakening (negative ions If it is determined that it is in a messy state, it will promptly present a forward danger warning and present a refreshing scent. If it is determined to be in a concentrated state, a danger warning will be presented. Is slower than in the above case.
なお、上記運転支援制御において、居眠り状態や眠気葛藤状態と判定された場合に、シートベルト張力制御装置20Cによりシートベルト18の張力を大きくしてもよい。このように、シートベルトの張力を制御する場合には、シートベルトの張力の大きさ、張力を変更するタイミング、変更時間等を、居眠り状態と眠気葛藤状態とで異ならせてもよい。
In the driving support control described above, when it is determined that the patient is in a drowsiness state or drowsiness conflict state, the tension of the
また、空調装置20Dを駆動してマイナスイオン、香り、酸素、音、及び振動の少なくとも1つを発生させる場合には、運転者状態に応じて、その発生タイミング、発生量、発生時間、及び発生種類の少なくとも1つを変更するようにしてもよい。例えば、振動を発生させる場合には、発生量として振幅を変更してもよいし、発生種類として周波数を変更してもよい。
Further, when the
また、空調装置20Dを駆動して覚醒のための冷風を送風し、車内の温度を低下させるようにしてもよい。このように温度を制御する場合には、変更タイミングや、変更量、変更方向(温度を上げるか下げるか)、変更時間(温度を変更した状態を継続する時間)等を運転者状態に応じて変更することができる。
Further, the
なお、本実施の形態では、覚醒度を反映する運転者情報として閉眼時間割合を用いる場合を例に挙げて説明したが、閉眼時間割合に代えて、脳波、心拍状態、顔部画像の顔表情情報より計測され眠気状態を表す顔表情眠気値、または運転者が申告した自己申告眠気値を用いるようにしてもよい。 In the present embodiment, the case where the closed eye rate is used as the driver information reflecting the degree of arousal has been described as an example, but instead of the closed eye rate, the brain wave, the heartbeat state, and the facial expression of the face image You may make it use the facial expression sleepiness value measured from information and showing the sleepiness state or the self-reported sleepiness value reported by the driver.
また、頭部画像から頭部動揺量を検出する例について説明したが、頚部筋電図により頭部動揺量を測定するようにしてもよい。 Moreover, although the example which detects the amount of head fluctuations from a head image was demonstrated, you may make it measure the amount of head fluctuations by a neck electromyogram.
次に、本発明の第2の実施の形態について説明する。 Next, a second embodiment of the present invention will be described.
本実施の形態は、図5に示すように、第1の実施の形態に加えて、ドライバの視線及び顔向きを検出する検出器10Eを設けるようにしたものである。制御回路16の機能ブロック図は、図2と同様であるので図示を省略する。本実施の形態では、運転者情報として、覚醒度と注意集中度とを各々反映する複数の運転者情報を用い、これらの複数の運転者情報の組合せに基づいて運転者状態を詳細に判定する。本実施の形態では、覚醒度を反映する運転者情報として閉眼時間割合を用い、注意集中度を反映する運転者情報として頭部振動伝達率及び視対象割合を用いる。
As shown in FIG. 5, in this embodiment, in addition to the first embodiment, a
次に、第2の実施の形態の制御回路による運転支援制御について説明する。 Next, driving support control by the control circuit of the second embodiment will be described.
運転者情報検出手段16Dでは、運転者情報検出器10で検出されたデータに基づいて、図6に示す閉眼時間割合X(t)、運転者の頭部振動伝達率Y(t)、及び視対象割合Z(t)を検出し、運転者状態判定手段16Aに出力する。また、運転者情報データベース14にX(t)、Y(t)、及びZ(t)のデータを蓄積する。
Based on the data detected by the
ここで、閉眼時間割合X(t)は、開眼時に対して一定以上(例えば、80%以上)眼を閉じている時間の割合であり、図6に示すように、X(t)のレベルが高いほど眠気(覚醒低下)が大きいことを表している。 Here, the eye closing time ratio X (t) is the ratio of the time during which the eyes are closed at a certain level or more (for example, 80% or more) with respect to the time when the eyes are opened. As shown in FIG. The higher the value, the greater the drowsiness (decreased arousal).
また、頭部振動伝達率Y(t)は、上記で説明したように、運転者の頭部動揺量のうち上下加速度において運転者に応じて決定された周波数帯域における加速度αhと、シート尻下部の上下加速度においてαhと同じ周波数帯数における加速度αsから次の(6)式により求められる値である。頭部振動伝達率Y(t)は、レベルが高い程注意集中度が低い(視認の深さが浅い)ことを表している。 Further, as described above, the head vibration transmission rate Y (t) is the acceleration α h in the frequency band determined according to the driver in the vertical acceleration of the amount of head fluctuation of the driver, and the seat bottom This is a value obtained by the following equation (6) from acceleration α s in the same frequency band number as α h in the vertical acceleration at the bottom. The head vibration transmission rate Y (t) indicates that the higher the level, the lower the attention concentration (the depth of visual recognition is shallower).
Y(t)=ln(αh(t))−ln(αs(t)) …(6)
そして、視対象割合Z(t)は、視対象を前方と前方以外の対象に分類し、各々の視線停留時間を集計した時間の割合である。前方への視線停留時間をEf(t)、前方以外の対象への視線停留時間をEn(t)とすると、以下の(7)式で表される。視対象割合Z(t)は、レベルが高い程注意が運転に集中していることを表している。
Y (t) = ln (α h (t)) − ln (α s (t)) (6)
The visual target ratio Z (t) is a ratio of time in which the visual target is classified into objects other than the front and the front, and the respective gaze stop times are totaled. Assuming that the forward gaze stop time is E f (t) and the gaze stop time to a subject other than the front is E n (t), the following expression (7) is expressed. The visual target ratio Z (t) indicates that attention is concentrated on driving as the level increases.
Z(t)=Ef(t)/En(t)×100 …(7)
運転者情報検出手段16Dは、閉眼時間割合X(t)、頭部振動伝達率Y(t)、及び視対象割合Z(t)の各データを運転者情報データベース14に蓄積し、運転者個人のレベル(平均値)及び変動(標準偏差)のデータを演算し、記録されている平均値及び標準偏差データを更新する。記録及び更新された平均値(Xmean、Ymean、Zmean)、及び標準偏差(XSD、YSD、ZSD)の各データは、判定閾値決定手段16Bによって読み込まれる。
Z (t) = E f (t) / E n (t) × 100 (7)
The driver information detecting means 16D accumulates each data of the eye closing time ratio X (t), the head vibration transmission ratio Y (t), and the visual target ratio Z (t) in the
車両・運転環境情報検出手段16Eでは、車両・運転環境情報検出器12で検出された車速、前車との車間距離、及びカーナビゲーションからの道路情報(道路種別)を取り込み、判定閾値決定手段16B及び運転支援制御手段16Cに出力する。
The vehicle / driving environment information detection means 16E takes in the vehicle speed detected by the vehicle / driving
判定閾値決定手段16Bでは、車両・運転環境情報検出手段16Eから入力された車両・運転環境情報に基づき、下記表4に従って基準判定閾値(Xth、Yth、Zth)を決定し、運転者情報データベース14から入力された運転者個人の平均値及び標準偏差に基づいて、基準判定閾値を補正した補正値(Xth *、Yth *、Zth *)を算出して運転者状態判定手段16Aに出力する。
The determination threshold value determination unit 16B determines a reference determination threshold value (X th , Y th , Z th ) according to the following Table 4 based on the vehicle / driving environment information input from the vehicle / driving environment
基準判定閾値(Xth、Yth、Zth)は、表1と同様に、市街地道路、自動車専用道路、及び山河道路等の車両・運転環境情報に応じて定められている。 The reference determination threshold values (X th , Y th , Z th ) are determined in accordance with vehicle / driving environment information such as urban roads, automobile roads, and mountain roads, as in Table 1.
運転者状態判定手段16Aでは、運転者情報検出手段16Dから入力されたデータX(t)、Y(t)、及びZ(t)を、判定閾値決定手段16Bから入力された運転者状態判定闘値の補正値(Xth *、Yth *、Zth *)と照合して運転者状態を図6に基づいて判定し、運転支援制御手段16Cに出力する。
The driver
本実施の形態では、運転者状態が、図7に基づいて、図4と同様に集中状態、漫然状態、眠気葛藤状態、及び居眠り状態のいずれかであるかを判定した後、集中状態及び眠気葛藤状態の各運転者状態について注意集中対象をZ(t)レベルで再度判定する。そして、Z(t)>Zth *のとき注意集中対象は運転と判定し、Z(t)<Zth *のとき注意集中対象は運転以外と判定する。 In the present embodiment, based on FIG. 7, after determining whether the driver state is one of the concentrated state, the sloppy state, the drowsiness conflict state, and the dozing state, as in FIG. 4, the concentrated state and sleepiness are determined. The attention concentration target is determined again at the Z (t) level for each driver state in the conflict state. When Z (t)> Z th * , the attention concentration target is determined to be driving, and when Z (t) <Z th * , the attention concentration target is determined to be other than driving.
運転支援制御手段16Cでは、運転者状態判定手段16Aで判定された運転者状態に応じて最適な運転支援の種類、タイミングを決定し、運転支援手段20に出力し、運転支援手段20によって次の表5に示すように運転支援を行う。
In the driving
表5の運転支援制御について説明すると、漫然状態、及び居眠り状態のときは、表3と同様に制御するが、眠気葛藤状態でかつ注意集中対象が運転のときは、周辺危険警報の呈示を早めると共に覚醒のための香りを呈示し、眠気葛藤状態でかつ注意集中対象が運転以外のときは、危険警報の呈示を早める。また、集中状態でかつ注意集中対象が運転のときは、危険情報の呈示を遅くし、集中状態でかつ注意集中対象が運転以外のときは、前方危険警報の呈示を早めると共に情報呈示装置等を用いて事故多発地点の案内を行う。 The driving support control in Table 5 will be described. When the state is a slumber and doze, the control is performed in the same manner as in Table 3. However, when the subject is a drowsiness conflict and the attention-focused subject is driving, the presentation of the surrounding danger warning is accelerated. At the same time, the scent for awakening is presented, and when the drowsiness conflict state and the attention focused object is other than driving, the presentation of the danger warning is accelerated. Also, when driving in the concentrated state and the attention-concentrated object, the presentation of the danger information is delayed, and when in the concentrated state and the attention-concentrating object is other than the driving, the presentation of the forward danger warning is accelerated and the information display device is Use this to guide the locations where accidents occur frequently.
なお、本実施の形態では、覚醒度を反映する運転者情報として閉眼時間割合を用いる場合を例に挙げて説明したが、閉眼時間割合に代えて、脳波、心拍状態、顔部画像の顔表情情報より計測され眠気状態を表す顔表情眠気値、または運転者が申告した自己申告眠気値を用いるようにしてもよい。 In the present embodiment, the case where the closed eye rate is used as the driver information reflecting the degree of arousal has been described as an example, but instead of the closed eye rate, the brain wave, the heartbeat state, and the facial expression of the face image You may make it use the facial expression sleepiness value measured from information and showing the sleepiness state or the self-reported sleepiness value reported by the driver.
次に、本発明の第3の実施の形態について説明する。第3の実施の形態は、図8に示すように、第1の実施の形態の判定閾値決定手段に代えて、支援レベル選択手段16Fから入力された選択信号に応じて判定閾値を決定する判定閾値決定手段16Gを設けたものである。 Next, a third embodiment of the present invention will be described. In the third embodiment, as shown in FIG. 8, in place of the determination threshold value determining means of the first embodiment, the determination threshold value is determined according to the selection signal input from the support level selection means 16F. Threshold determining means 16G is provided.
運転者情報検出手段16Dでは、第1の実施の形態と同様に、運転者の閉眼時間割合X(t)及び頭部振動伝達率Y(t)を検出し、運転者状態判定手段16Aに出力する。また、運転者情報データベース14にデータを蓄積する。
As with the first embodiment, the driver
ここで、閉眼時間割合X(t)は、上記と同様に、開眼時に対して一定以上(例えば80%以上)眼を閉じている時間の割合であり、X(t)が高いほど眠気(覚醒低下)が大きいことを表している。 Here, the eye closing time ratio X (t) is the ratio of the time during which the eyes are closed more than a fixed amount (for example, 80% or more) with respect to the time of eye opening, as described above, and drowsiness (wakefulness) as X (t) increases. (Decrease) is large.
頭部振動伝達率Y(t)は、運転者の頭部動揺量のうち上下加速度において運転者に応じて決定された周波数帯域における加速度αhと、シート尻下部の上下加速度においてαhと同じ周波数帯域における加速度αSから上記の(1)式により求められる値である。Y(t)が高いほど注意集中度は低い(視認の深さが浅い)ことを表している。 Head vibration transmissibility Y (t) is the acceleration alpha h in a frequency band which is determined according to the driver in the vertical acceleration of the head shaking amount of the driver, the same as the alpha h in the vertical acceleration of the lower sheet ass This value is obtained from the above equation (1) from the acceleration α S in the frequency band. The higher Y (t), the lower the attention concentration (the depth of visual recognition is shallow).
運転者情報データベース14では、運転者情報検出手段16Dから入力された運転者情報データを蓄積し、運転者個人のレベル(平均値)及び変動(標準偏差)のデータを記録・更新する。記録・更新された平均値(Xmean、Ymean)及び標準偏差(XSD、YSD)データを判定閾値決定手段16Gに出力する。
The
支援レベル選択手段16Fでは、運転者が警報や支援を出す頻度を下記のように例えば、(1)〜(3)の3段階で選択する。この選択された結果は、判定閾値決定手段16Gに入力される。
In the support level selection means 16F, the frequency with which the driver gives warnings and assistance is selected in three stages (1) to (3), for example, as described below. The selected result is input to the determination threshold
(1)お知らせモード:警報や支援が比較的多い
(2)ノーマルモード:通常の設定
(3)サイレントモード:警報や支援が比較的少ない
判定閾値決定手段16Gでは、支援レベル選択手段16Fで選択された支援レベルに基づいて、下記表6に従って基準判定閾値(Xth、Yth)を決定し、運転者情報データベース14から入力された運転者個人の平均値及び標準偏差に基づいて、補正値(Xth *、Yth *)を算出して運転者状態判定手段16Aに出力する。
(1) Notification mode: relatively high warning and support (2) Normal mode: normal setting (3) Silent mode: relatively low warning and support The decision threshold decision means 16G is selected by the support level selection means 16F Based on the support level, a reference determination threshold value (X th , Y th ) is determined according to Table 6 below, and a correction value (based on the average value and standard deviation of the individual driver input from the
運転者状態判定手段16Aでは、運転者情報検出手段16Dから入力されたデータX(t)及びY(t)を判定閾値決定手段16Bから入力された運転者状態判定閾値補正値(Xth *、Yth *)と照合して運転者状態を判定し、運転支援制御手段16Cに出力する。 The driver state determination means 16A uses the data X (t) and Y (t) input from the driver information detection means 16D as the driver state determination threshold correction value (X th * , X) input from the determination threshold value determination means 16B. Y th * ) is compared to determine the driver state and output to the driving support control means 16C.
次に、本発明の第4の実施の形態について説明する。 Next, a fourth embodiment of the present invention will be described.
本実施の形態は、図9に示すように、第1の実施の形態の加速度検出器10C及び加速度センサ10Dに代えて、操舵角を検出する操舵角センサ10Fを設けるようにしたものである。制御回路16の機能ブロック図は、図2と同様であるので図示を省略する。本実施の形態では、運転者情報として、覚醒度と運転能力とを各々反映する複数の運転者情報を用い、これらの複数の運転者情報の組合せに基づいて運転者状態を詳細に判定する。本実施の形態では、覚醒度を反映する運転者情報として閉眼時間割合を用い、運転能力を反映する運転者情報として低周波数操舵量を用いる。
In this embodiment, as shown in FIG. 9, a
次に、第4の実施の形態の制御回路による運転支援制御について説明する。 Next, driving support control by the control circuit of the fourth embodiment will be described.
運転者情報検出手段16Dでは、運転者情報検出器10で検出されたデータに基づいて、図10に示す運転者の閉眼時間割合X(t)、低周波数操舵量比Y(t)を検出し、運転者状態判定手段16Aに出力する。また、運転者情報データベース14にX(t)及びY(t)のデータを蓄積する。
Based on the data detected by the
ここで、閉眼時間割合X(t)は、第1の実施の形態と同様に、開眼時に対して一定以上(例えば、80%以上)眼を閉じている時間の割合であり、図10に示すように、X(t)のレベルが高いほど眠気(覚醒低下)が大きいことを表している。 Here, the eye closing time ratio X (t) is the ratio of the time during which the eyes are closed at a certain level or more (for example, 80% or more) with respect to the time of eye opening, as shown in FIG. Thus, the higher the level of X (t), the greater the drowsiness (decrease in alertness).
また、低周波数操舵量比Y(t)は、操舵角センサ10Fによって、2つの異なる周波数帯域の操舵量、すなわち、基準操舵量θ0(t)(周波数帯域f0)と操舵量θ(t)(周波数帯域f)とを測定し、以下の(8)式に示すように、基準操舵量θ0(t)と操舵量θ(t)との比率の自然対数により求められる値である。低周波数操舵量比Y(t)は、レベルが高いほど操舵の滑らかさ(操舵能力)が低下していることを示している。
Y(t)=ln(θ(t))−ln(θ0(t)) …(8)
Further, the low frequency steering amount ratio Y (t) is obtained by the
Y (t) = ln (θ (t)) − ln (θ 0 (t)) (8)
運転者情報検出手段16Dは、閉眼時間割合X(t)及び低周波数操舵量比Y(t)の各データを運転者情報データベース14に蓄積し、運転者個人のレベル(平均値)及び変動(標準偏差)のデータを演算し、記録されている平均値及び標準偏差データを更新する。記録及び更新された平均値(Xmean、Ymean)、及び標準偏差(XSD、YSD)の各データは、判定閾値決定手段16Bによって読み込まれる。
The driver information detection means 16D accumulates each data of the eye closing time ratio X (t) and the low frequency steering amount ratio Y (t) in the
車両・運転環境情報検出手段16Eでは、車両・運転環境情報検出器12で検出された車速、前車との車間距離、及びカーナビゲーションからの道路情報(道路種別)を取り込み、判定閾値決定手段16B及び運転支援制御手段16Cに出力する。
The vehicle / driving environment information detection means 16E takes in the vehicle speed detected by the vehicle / driving
判定閾値決定手段16Bでは、車両・運転環境情報検出手段16Eから入力された車両・運転環境情報に基づき、下記表7に従って基準判定閾値(Xth1、Xth2、Yth1、Yth2)を決定する。基準判定閾値(Xth1、Xth2、Yth1、Yth2)は、表1と同様に、市街地道路、自動車専用道路、及び山河道路等の車両・運転環境情報に応じて定められている。ここでは、閉眼時間割合X(t)及び低周波数操舵量比Y(t)に対してそれぞれ2つの判定閾値が決定される。 Based on the vehicle / driving environment information input from the vehicle / driving environment information detecting means 16E, the determination threshold determining means 16B determines the reference judgment thresholds (X th1 , X th2 , Y th1 , Y th2 ) according to Table 7 below. . As in Table 1, the reference determination threshold values (X th1 , X th2 , Y th1 , Y th2 ) are determined according to vehicle / driving environment information such as urban roads, automobile exclusive roads, and mountain roads. Here, two determination thresholds are determined for each of the closed eye time ratio X (t) and the low frequency steering amount ratio Y (t).
更に、判定閾値決定手段16Bでは、運転者情報データベース14から入力された運転者個人の平均値及び標準偏差に基づいて、基準判定閾値を補正した補正値(Xth1 *、Xth2 *、Yth1 *、Yth2 *)を算出して運転者状態判定手段16Aに出力する。
Further, in the determination threshold value determination unit 16B, correction values (X th1 * , X th2 * , Y th1) obtained by correcting the reference determination threshold value based on the average value and standard deviation of the individual driver input from the
ここで、基準判定閾値の補正について詳述する。
表7の基準判定閾値を定義した際の運転者情報の平均値をMX0、MY0、標準偏差をSDX0、SDY0とすると、平均値MX、MY、標準偏差SDX、SDYを有する運転者では運転者状態判定閾値Xth1、Xth2、Yth1、Yth2は次のXth1 *、Xth2 *、Yth1 *、Yth2 *に補正される。
Here, the correction of the reference determination threshold will be described in detail.
When the average value of the driver information when defining the reference judgment threshold values in Table 7 is M X0 , M Y0 and the standard deviation is SD X0 , SD Y0 , the average values M X , M Y , standard deviations SD X , SD Y The driver state determination threshold values X th1 , X th2 , Y th1 , Y th2 are corrected to the following X th1 * , X th2 * , Y th1 * , Y th2 * .
Xth1 *=MX+SDX/SDX0(Xth1−MX0) …(9)
Xth2 *=MX+SDX/SDX0(Xth2−MX0) …(10)
Yth1 *=MY+SDY/SDY0(Yth1−MY0) …(11)
Yth2 *=MY+SDY/SDY0(Yth2−MY0) …(12)
X th1 * = M X + SD X / SD X0 (X th1 -M X0 ) (9)
X th2 * = M X + SD X / SD X0 (X th2 −M X0 ) (10)
Y th1 * = M Y + SD Y / SD Y0 (Y th1 -M Y0) ... (11)
Y th2 * = M Y + SD Y / SD Y0 (Y th2 -M Y0) ... (12)
ここで、運転者状態判定閾値Xth1は、平均値MX0と標準偏差SDX0とによりMX0よりもa1×SDX0大きい値として次の(13)式のように表わされる。
Xth1=MX0+a1SDX0 …(13)
ただし、a1は定数である。
Here, the driver state determination threshold value X th1 is expressed as the following equation (13) as a value a 1 × SD X0 larger than M X0 by the average value M X0 and the standard deviation SD X0 .
X th1 = M X0 + a 1 SD X0 (13)
However, a 1 is a constant.
平均値MX、標準偏差SDXの運転者の判定閾値Xth1 *は、平均値MXと標準偏差SDXにより同様に以下の(14)式で表わされる。 Average value M X, the determination threshold value X th1 * is the driver of the standard deviation SD X, represented by the following equation (14) in the same manner by the mean value M X and the standard deviation SD X.
Xth1 *=MX+a1SDX(a1は定数)…(14)
ここで、a1はXth1、Xth1 *に共通の定数であり、(13)式よりa1=1/SDX0(Xth1−MX0)であるので、これを(14)式に代入すると上記(9)式が得られる。
X th1 * = M X + a 1 SD X (a 1 is a constant) (14)
Here, a 1 is a constant common to X th1 and X th1 *. Since a 1 = 1 / SD X0 (X th1 −M X0 ) from the equation (13), this is substituted into the equation (14). Then, the above equation (9) is obtained.
また、(10)〜(12)式も次の式から同様に求められる。 Further, the equations (10) to (12) are similarly obtained from the following equations.
Xth2=MX0+a2SDY0、 Xth2 *=MX+a2SDX (a2は定数)
Yth1=MY0+b1SDY0、 Yth1 *=MY+b1SDY (b1は定数)
Yth2=MY0+b2SDY0、 Yth2 *=MY+b2SDY (b2は定数)
X th2 = M X0 + a 2 SD Y0 , X th2 * = M X + a 2 SD X (a 2 is a constant)
Y th1 = M Y0 + b 1 SD Y0 , Y th1 * = M Y + b 1 SD Y (b 1 is a constant)
Y th2 = M Y0 + b 2 SD Y0 , Y th2 * = M Y + b 2 SD Y (b 2 is a constant)
運転者状態判定手段16Aでは、運転者情報検出手段16Dから入力されたデータX(t)及びY(t)を、判定閾値決定手段16Bから入力された運転者状態判定闘値の補正値(Xth1 *、Xth2 *、Yth1 *、Yth2 *)と照合して運転者状態を図11に基づいて判定する。
The driver
図11の判定閾値を個人に適合させて補正した値に基づいた判定は、下記表8の眠気と運転者状態との関係、及び表9の運転能力指標と運転者状態との関係から定められている。 The determination based on the value corrected by adapting the determination threshold in FIG. 11 to suit the individual is determined from the relationship between sleepiness and driver state in Table 8 below, and the relationship between the driving ability index and driver state in Table 9. ing.
表8に示すように、X(t)が図11において0で示された領域に位置する場合には、覚醒低下はなく、眠気なしと判定され、1で示された領域に位置する場合には、覚醒低下があり、眠気があると判定され、2で示された領域に位置する場合には、大幅な覚醒低下状態であって、眠気は大きいと判定される。 As shown in Table 8, when X (t) is located in the area indicated by 0 in FIG. 11, there is no decrease in wakefulness, and it is determined that there is no sleepiness, and when it is located in the area indicated by 1. Is determined to have drowsiness and drowsiness, and when located in the region indicated by 2, it is determined that the drowsiness is large and drowsiness is large.
また、表9に示すように、Y(t)が図11においてAで示された領域に位置する場合には、運転能力低下はないと判定され、Bで示された領域に位置する場合には、ふらつきが発生または車間距離維持能力低下しており、運転能力が低下していると判定され、Cで示された領域に位置する場合には、車線逸脱または追突の可能性が大きく、運転能力低下は大きいと判定される。 In addition, as shown in Table 9, when Y (t) is located in the region indicated by A in FIG. 11, it is determined that there is no reduction in driving ability, and when it is located in the region indicated by B. Is determined to be wobbling or having decreased inter-vehicle distance maintenance capability, and driving capability has decreased, and if it is located in the area indicated by C, there is a high possibility of lane departure or rear-end collision. It is determined that the capacity drop is large.
運転者状態判定手段16Aは、運転者状態を図11に示される9個の運転者状態(0−A状態〜2−C状態)のいずれかに判定し、判定結果を運転支援制御手段16Cに出力する。
The driver
運転支援制御手段16Cでは運転者状態判定手段16Aで判定された運転者状態に応じて、下記表10に示す運転者状態と運転支援制御例に従って最適な運転支援の種類、タイミングを決定し、運転支援手段20に出力する。
The driving
表10に示す運転支援制御例について説明する。0−A状態と判定された場合には、覚醒度低下はなく、運転能力の低下もないため、覚醒向上・維持や注意喚起のための運転支援はせず、前方の渋滞情報のみを呈示する。0−B状態と判定された場合には、運転能力に低下が見られ漫然状態であるため、周辺危険情報及び事故多発地点案内の呈示を行うと共に、周辺に対する注意を喚起するための情報呈示を早める。0−C状態と判定された場合には、眠気はないが、脇見運転等により運転能力が大幅に低下した可能性が高いため、前方危険情報や事故多発地点案内を呈示すると共に、前方に対する注意を喚起するための情報呈示を早める。また、車両運動制御において、制動力を上げ、運転能力低下をカバーする。 An example of driving support control shown in Table 10 will be described. When it is determined that the state is 0-A, there is no decrease in arousal level and there is no decrease in driving ability, so driving assistance for improving and maintaining arousal and alerting is not provided, and only forward traffic congestion information is presented. . When it is determined to be in the 0-B state, the driving ability is reduced and it is in a messy state, so the surrounding danger information and the accident frequent spot guidance are presented, and information to alert the surroundings is presented. Advance. If it is determined to be in the 0-C state, there is no drowsiness, but there is a high possibility that the driving ability has dropped significantly due to driving aside. Accelerate information presentation to arouse Further, in vehicle motion control, the braking force is increased to cover the decrease in driving ability.
1−A状態と判定された場合には、運転能力の低下はないが、眠気があるため、覚醒向上および維持のための振動や香り、あるいは酸素を発生させると共に、休憩誘導メッセージの呈示や事故多発地点案内の呈示を行う。1−B状態と判定された場合には、眠気があり運転能力も低下しているため、覚醒向上および維持のための振動や香り、あるいは酸素を1−A状態のときよりも長く発生させると共に、駐車を誘導してストレッチを行わせるためのメッセージを呈示し、周辺に対する注意を喚起するための情報呈示や車線逸脱警報の出力を早めに行う。1−C状態と判定された場合には、眠気があり運転能力が大幅に低下しているため、覚醒向上および維持のための振動や香り、あるいは酸素を1−B状態のときよりも長く発生させる。更に、路肩停車を誘導して覚醒のための体操を行わせるためのメッセージを呈示すると共に、周辺に対する注意を喚起するための情報呈示や車線逸脱警報の出力だけでなく、前方に対する注意を喚起するための情報や追突警報を早めに行う。更にまた、車両運動制御において、操舵反力を上げ、運転能力低下をカバーする。 If it is determined to be in the 1-A state, there will be no decrease in driving ability, but there will be drowsiness. Presents frequent location guidance. When it is determined to be in the 1-B state, drowsiness and driving ability are reduced, so that vibration and scent for improving awakening and maintenance, or oxygen is generated longer than in the 1-A state. A message for guiding the parking to perform stretching is presented, and information is presented to alert the surroundings and a lane departure warning is output early. When it is determined to be in the 1-C state, drowsiness and driving ability are greatly reduced, so vibration and scent for improving and maintaining arousal, or oxygen is generated longer than in the 1-B state. Let In addition, it presents a message to guide the shoulder stop and perform exercises for awakening, as well as information to call attention to the surrounding area and output a lane departure warning, as well as a warning to the front. Information and rear-end collision warning are performed early. Furthermore, in the vehicle motion control, the steering reaction force is increased to cover the decrease in driving ability.
2−A状態と判定された場合には、運転能力低下はないが覚醒度低下が大きいため、覚醒向上および維持のための音や振動を発生させたり、冷風を出したりする。また、休憩を誘導するメッセージや、事故多発地点案内を呈示する。2−B状態と判定された場合には、覚醒度低下が大きく運転能力の低下もみられるため、2−A状態よりも長く覚醒向上および維持のための音や振動を発生させたり、冷風を出したりする。また、駐車を誘導してストレッチを行わせるためのメッセージを呈示し、周辺に対する注意を喚起するための情報呈示や車線逸脱警報の出力を早めに行う。2−C状態と判定された場合には、覚醒度低下および運転能力低下が大きいため、2−B状態よりも音量を大きくして覚醒向上および維持のための音を発生させたり、2−B状態よりも長く振動を発生させたり、冷風を出したりする。また、路肩停車を誘導して覚醒のための体操を行わせるためのメッセージを呈示すると共に、周辺に対する注意を喚起するための情報呈示や車線逸脱警報の出力だけでなく、前方危険情報や事故多発地点案内を早めに行う。更にまた、車両運動制御において、制動力及び操舵反力を上げ、運転能力低下をカバーする。 If the 2-A state is determined, the driving ability is not reduced, but the arousal level is greatly reduced, so that sounds and vibrations for improving and maintaining arousal are generated, and cold air is emitted. It also presents a message that induces breaks, and information on accident location. If the 2-B state is determined, the degree of arousal is greatly reduced and the driving ability is also reduced. Therefore, the sound and vibration for improving and maintaining arousal are generated longer than the 2-A state, and cold air is emitted. Or In addition, a message for guiding the parking to perform stretching is presented, and information presentation for alerting the surroundings and output of a lane departure warning are performed early. When the 2-C state is determined, the arousal level and the driving ability are greatly reduced. Therefore, the sound volume is increased compared to the 2-B state to generate a sound for improving and maintaining arousal, or 2-B Generates vibrations or emits cool air longer than the state. In addition to presenting a message to guide the shoulder stop and perform gymnastics for awakening, not only information to alert the surroundings and output of lane departure warning, but also forward danger information and accident occurrence Provide point guidance early. Furthermore, in the vehicle motion control, the braking force and the steering reaction force are increased to cover the decrease in driving ability.
なお、運転者状態に応じて音や香り、振動の発生時間や強さや大きさ、種類を変えてもよいし、情報を表示する場合には、その色や文字・記号の大きさを変えて目立ちやすくしてもよい。また、車両運動制御においても、制動力や操舵反力の大きさを調整するようにしてもよい。 The sound, scent, vibration generation time, intensity, size, and type may be changed according to the driver's condition. When displaying information, the color, character / symbol size may be changed. You may make it stand out. Also in the vehicle motion control, the magnitude of the braking force or the steering reaction force may be adjusted.
なお、運転能力を反映する運転者情報として、低周波数操舵量に代えて、アクセルペダル操作量やブレーキペダル操作量を用いるようにしてもよい。この場合には、図9に示すように、アクセルペダル操作量及びブレーキペダル操作量を検出するアクセル・ブレーキペダル操作量センサ10Gがアクセルペダル及びブレーキペダルに取り付けられる。この場合、アクセルペダル操作量を検出するアクセルペダル操作量センサのみ、またはブレーキペダル操作量を検出するブレーキペダル操作量センサのみを取り付けるようにしてもよい。また、車両・運転環境情報検出器12で検出された前車との車間距離と、アクセル・ブレーキペダル操作量センサ10Gの検出結果とに基づいて、前車との車間距離維持のためのアクセルペダル操作量またはブレーキペダル操作量を検出し、これを運転能力を反映する運転者情報として用いてもよい。
Note that as driver information reflecting the driving ability, an accelerator pedal operation amount or a brake pedal operation amount may be used instead of the low frequency steering amount. In this case, as shown in FIG. 9, an accelerator / brake pedal
次に、本発明の第5の実施の形態について説明する。 Next, a fifth embodiment of the present invention will be described.
本実施の形態は、図12に示すように、第1の実施の形態の閉眼時間検出器10Bに代えて、車両に搭載され、車両が走行する車線を含み車両周辺を撮影する車外環境用カメラ10Hと、車外環境用カメラ10Hで撮影された画像に基づいて、車線幅方向の車両位置の変動を示す車両ふらつき度を検出する車両ふらつき検出器10Jを設けるようにしたものである。
In the present embodiment, as shown in FIG. 12, instead of the eye-closed
図13は、本実施の形態における制御回路16の機能ブロック図であり、第3の実施の形態の図8の構成に加え、運転支援選択手段22が設けられている。運転支援選択手段22は、運転者自身が運転支援内容を予め選択するための手段であって、例えば、表示された運転支援内容の選択項目からボタン等により運転者状態に応じて実施させる運転支援内容を選択できるような構成になっている。
FIG. 13 is a functional block diagram of the
本実施の形態では、運転者情報として、注意集中度と運転能力とを各々反映する複数の運転者情報を用い、これらの複数の運転者情報の組合せに基づいて運転者状態を詳細に判定する。本実施の形態では、注意集中度を反映する運転者情報として頭部動揺量より求まる頭部振動伝達率を用い、運転能力を反映する運転者情報として車両ふらつき度を用いる。 In this embodiment, a plurality of pieces of driver information that reflect the attention concentration and driving ability are used as the driver information, and the driver state is determined in detail based on a combination of the plurality of pieces of driver information. . In the present embodiment, the head vibration transmissibility obtained from the head shaking amount is used as the driver information reflecting the attention concentration, and the vehicle wobbling degree is used as the driver information reflecting the driving ability.
次に、第5の実施の形態の制御回路による運転支援制御について説明する。 Next, driving support control by the control circuit of the fifth embodiment will be described.
運転者情報検出手段16Dは、運転者の頭部振動伝達率X(t)及び車両ふらつき度Y(t)を検出し、運転者状態判定手段16Aに出力する。また、運転者情報データベース14にX(t)及びY(t)のデータを蓄積する。
The driver information detection means 16D detects the driver's head vibration transmission rate X (t) and the vehicle wobbling degree Y (t), and outputs them to the driver state determination means 16A. Further, X (t) and Y (t) data are stored in the
ここで、頭部振動伝達率X(t)は、上記で説明したように、運転者の頭部動揺量のうち上下加速度において運転者に応じて決定された周波数帯域における加速度αhと、シート尻下部の上下加速度においてαhと同じ周波数帯数における加速度αsから次の(15)式により求められる値である。頭部振動伝達率X(t)は、レベルが高い程注意集中度が低い(視認の深さが浅い)ことを表している。
X(t)=ln(αh(t))−ln(αs(t)) …(15)
Here, as described above, the head vibration transmission rate X (t) is the acceleration α h in the frequency band determined according to the driver in the vertical acceleration of the driver's head shaking amount, the seat, This is a value obtained from the following equation (15) from the acceleration α s in the same frequency band as α h in the vertical acceleration at the bottom of the bottom. The head vibration transmission rate X (t) indicates that the higher the level, the lower the attention concentration (the depth of visual recognition is shallower).
X (t) = ln (α h (t)) − ln (α s (t)) (15)
また、車両ふらつき度Y(t)は、車線幅方向の車両位置の変動を示す値であって、ここでは、車両ふらつき度Y(t)として車線内の車両位置(例えば車線幅の中心位置と車両幅の中心位置との距離)の標準偏差を算出する。車両ふらつき検出器10Jは、車外環境用カメラ10Hで撮影された画像に基づいて車線に対する車両位置を検出し、該標準偏差を算出する。この車両ふらつき度Y(t)のレベルが高いほど、操舵能力が低下していることを表している。
Further, the vehicle wobbling degree Y (t) is a value indicating the fluctuation of the vehicle position in the lane width direction. Here, the vehicle wobbling degree Y (t) is the vehicle position in the lane (for example, the center position of the lane width) The standard deviation of the distance from the center position of the vehicle width is calculated. The
運転者情報検出手段16Dは、頭部振動伝達率X(t)及び車両ふらつき度Y(t)の各データを運転者情報データベース14に蓄積し、運転者個人のレベル(平均値)及び変動(標準偏差)のデータを演算し、記録されている平均値及び標準偏差データを更新する。記録及び更新された平均値(Xmean、Ymean)、及び標準偏差(XSD、YSD)の各データは、判定閾値決定手段16Bによって読み込まれる。
The driver information detection means 16D accumulates each data of the head vibration transmission rate X (t) and the vehicle wobbling degree Y (t) in the
車両・運転環境情報検出手段16Eでは、車両・運転環境情報検出器12で検出された車速、前車との車間距離、及びカーナビゲーションからの道路情報(道路種別)を取り込み、判定閾値決定手段16B及び運転支援制御手段16Cに出力する。
The vehicle / driving environment information detection means 16E takes in the vehicle speed detected by the vehicle / driving
運転者情報データベース14では、運転者情報検出手段16Dから入力された運転者情報データを蓄積し、運転者個人のレベル(平均値)及び変動(標準偏差)のデータを記録・更新する。記録・更新された平均値(Xmean、Ymean)及び標準偏差(XSD、YSD)データを判定閾値決定手段16Gに出力する。
The
支援レベル選択手段16Fでは、運転者が予め警報や支援を出す頻度を第3の実施の形態と同様に「お知らせモード」、「ノーマルモード」、及び「サイレントモード」の3段階で選択する。運転者により選択された結果は、判定閾値決定手段16Gに入力される。
In the support level selection means 16F, the frequency at which the driver issues an alarm or support in advance is selected in three stages, “notification mode”, “normal mode”, and “silent mode”, as in the third embodiment. The result selected by the driver is input to the determination threshold
判定閾値決定手段16Gでは、支援レベル選択手段16Fで選択された支援レベルに基づいて、下記表11に従って基準判定閾値(Xth1、Xth2、Yth1、Yth2)を決定し、運転者情報データベース14から入力された運転者個人の平均値及び標準偏差に基づいて、補正値(Xth1 *、Xth2 *、Yth1 *、Yth2 *)を算出して運転者状態判定手段16Aに出力する。
The determination threshold
運転者状態判定手段16Aでは、運転者情報検出手段16Dから入力されたデータX(t)及びY(t)を判定閾値決定手段16Bから入力された運転者状態判定閾値補正値(Xth1 *、Xth2 *、Yth1 *、Yth2 *)と照合して運転者状態を判定し、運転支援制御手段16Cに出力する。 The driver state determination means 16A uses the data X (t) and Y (t) input from the driver information detection means 16D as the driver state determination threshold correction value (X th1 * , X) input from the determination threshold value determination means 16B. X th2 * , Y th1 * , Y th2 * ) are compared with each other to determine the driver state and output it to the driving support control means 16C.
運転支援制御手段16Cは、予め運転支援選択手段22で選択された選択結果に応じた運転支援を実施する。運転者は、運転者状態判定手段16Aで判定される運転者状態に応じて実施する支援内容を運転開始前に予め運転支援選択手段22で予め選択し、設定しておく。設定内容は、表10のように各運転者状態に応じて記憶しておく。このように、運転者自身が運転支援内容を選択できるため、より運転者個人に適合した運転支援を実施することができる。
The driving
なお、上記各実施の形態では、覚醒度を反映する運転者情報、注意集中度を反映する運転者情報、及び運転能力を反映する運転者情報の中から選択された2つの運転者情報を検出して運転者状態を判定する例について説明したが、覚醒度を反映する運転者情報、注意集中度を反映する運転者情報、及び運転能力を反映する運転者情報の3つの運転者情報を検出して運転者状態を判定するようにしてもよい。また、運転者自身が、検出可能な運転者情報の中から運転者状態を判定するために用いる少なくとも2つの運転者情報を予め選択しておき、選択した運転者情報を用いるようにしてもよい。 In each of the above embodiments, two pieces of driver information selected from driver information that reflects arousal level, driver information that reflects attention concentration, and driver information that reflects driving ability are detected. The example of determining the driver state is explained, but three pieces of driver information are detected: driver information reflecting the degree of arousal, driver information reflecting the attention concentration, and driver information reflecting the driving ability. Then, the driver state may be determined. In addition, the driver himself may select in advance at least two pieces of driver information used for determining the driver state from the detectable driver information, and the selected driver information may be used. .
自動車運転において、覚醒低下による注意レベルの低下や、運転への注意集中不足、運転能力の低下は、ブレーキ等の反応遅れや歩行者等の見逃し、誤操作、判断ミスなどの原因となり危険であるが、以上説明したように上記各実施の形態によれば、運転者状態を走行状態に影響されることなく詳細に判別できる。例えば、集中状態、居眠り状態の他、漫然状態(覚醒しているが注意集中が低い状態)や眠気と葛藤状態(覚醒低下してるが注意集中が高い状態)等を分離して判別できる。 In car driving, a reduction in attention level due to reduced arousal, lack of attention concentration in driving, and a decrease in driving ability are dangerous due to delays in response to brakes, oversight of pedestrians, misoperation, misjudgment, etc. As described above, according to each of the above embodiments, the driver state can be determined in detail without being affected by the traveling state. For example, in addition to a concentration state and a dozing state, it is possible to separate and discriminate such as an absurd state (a state of arousal but low attention concentration), drowsiness and a conflict state (a state of reduced arousal but high attention concentration), and the like.
また、運転者個人に適合させ、車両・運転環境状態に応じた方法で的確に判定できるので、その時の運転者状態に応じた最適な運転支援を実施することができる。逆に、運転環境に応じた良好な運転者状態の時には警報の呈示を遅くすること等により、不必要な支援による煩わしさを低減できる。 In addition, since it can be accurately determined by a method adapted to the individual driver and in accordance with the vehicle / driving environment state, it is possible to provide optimum driving assistance according to the state of the driver at that time. On the contrary, the troublesomeness caused by unnecessary assistance can be reduced by delaying the presentation of an alarm when the driver is in a good state according to the driving environment.
10 運転者情報検出器
10A カメラ
10B 閉眼時間検出器
10C 加速度検出器
10D 加速度センサ
10E 視線・顔向き検出器
10F 操舵角センサ
10G アクセル・ブレーキペダル操作量センサ
10H 車外環境用カメラ
10J 車両ふらつき検出器
12 車両・運転環境情報検出器
14 運転者情報データベース
16 制御回路
20 運転支援手段
20A スピーカ
20B 情報呈示装置
20C シートベルト張力制御装置
20D 空調装置
20E シート振動装置
DESCRIPTION OF
Claims (12)
前記運転者情報検出手段で検出された各運転者情報の運転者個人の平均値及び標準偏差を記憶する運転者情報データベースと、
車両運転状態または外部環境状態を示す車両・運転環境情報を検出する車両・運転環境情報検出手段と、
前記運転者情報データベースに記憶された運転者個人の平均値及び標準偏差と、前記車両・運転環境情報検出手段で検出された車両・運転環境情報とに基づいて、運転者状態を判定するための運転者状態判定閾値を決定する判定閾値決定手段と、
前記運転者情報検出手段で検出された各運転者情報、及び前記判定閾値決定手段で決定された運転者状態判定閾値に基づいて、運転者状態を判定する運転者状態判定手段と、
を含む運転者状態判定装置。 Driver information detecting means for detecting at least two driver information selected from driver information reflecting arousal level, driver information reflecting a degree of attention concentration, and driver information reflecting driving ability;
A driver information database that stores average values and standard deviations of individual drivers of each driver information detected by the driver information detecting means;
Vehicle / driving environment information detecting means for detecting vehicle / driving environment information indicating a vehicle driving state or an external environmental state;
For determining the driver state based on the average value and standard deviation of the individual driver stored in the driver information database and the vehicle / driving environment information detected by the vehicle / driving environment information detecting means. A determination threshold value determining means for determining a driver state determination threshold value;
Based on each driver information detected by the driver information detecting means, and a driver state determining threshold determined by the determination threshold determining means, a driver state determining means for determining a driver state;
A driver state determination device including:
前記注意集中度を反映する運転者情報は、頭部加速度、頭部画像、及び頚部筋電図の少なくとも1つにより計測された運転者の頭部動揺量より得られる頭部振動伝達率と、視線の方向により計測される運転者の注意集中対象との少なくとも一方であり、
前記運転能力を反映する運転者情報は、基準操舵量と操舵量とにより求められる低周波数操舵量、アクセルペダル操作量、ブレーキペダル操作量、車線幅方向の車両位置の変動を示す車両ふらつき度、及び前車との車間距離維持のためのアクセルペダル操作量またはブレーキペダル操作量の少なくとも1つである請求項1記載の運転者状態判定装置。 The driver information that reflects the degree of arousal is measured based on the brain wave, heart rate state, closed eye ratio that indicates the percentage of time that the eyes are closed for a certain amount of time when the eyes are open, and facial expression information of the facial image, and represents the drowsiness state. At least one of a facial expression sleepiness value and a self-reported sleepiness value declared by the driver,
The driver information reflecting the attention concentration is a head vibration transmissibility obtained from a driver's head shaking measured by at least one of head acceleration, head image, and neck electromyogram, It is at least one of the driver's attention concentration target measured by the direction of gaze,
The driver information reflecting the driving ability includes a low-frequency steering amount obtained from a reference steering amount and a steering amount, an accelerator pedal operation amount, a brake pedal operation amount, a vehicle wobbling degree indicating a change in vehicle position in the lane width direction, 2. The driver state determination device according to claim 1, which is at least one of an accelerator pedal operation amount and a brake pedal operation amount for maintaining a distance between the vehicle and the front vehicle.
前記運転者状態判定手段で判定された運転者状態に応じた運転支援の種類及びタイミングで、運転支援手段を制御する運転支援制御手段と、
を含む運転支援装置。 The driver state determination device according to any one of claims 1 to 4,
Driving assistance control means for controlling the driving assistance means at the type and timing of the driving assistance corresponding to the driver state determined by the driver state determination means;
A driving support device including
運転支援を表す情報を呈示する情報呈示手段、
リラックス、リフレッシュ、覚醒、または注意喚起のために、マイナスイオン、香り、酸素、音、及び振動の少なくとも1つを発生する発生手段、
リラックス、リフレッシュ、覚醒、または注意喚起のために、車内の温度を制御する温度制御手段、
リラックス、リフレッシュ、覚醒、または注意喚起のために、シートベルトの張力を制御するシートベルト張力制御手段、
及び運転能力低下を補うための車両運動制御を行う車両運動制御手段の少なくとも1つを含む請求項5または請求項6記載の運転支援装置。 The driving support means includes
Information presenting means for presenting information representing driving assistance;
Generating means for generating at least one of negative ions, scents, oxygen, sound, and vibration for relaxation, refreshment, arousal or alerting;
Temperature control means to control the temperature in the car for relaxation, refreshment, awakening or alerting,
Seat belt tension control means for controlling the tension of the seat belt for relaxation, refreshment, awakening, or alerting,
The driving support device according to claim 5, further comprising at least one of vehicle motion control means for performing vehicle motion control for compensating for a decrease in driving ability.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006276353A JP2007265377A (en) | 2006-03-01 | 2006-10-10 | Driver state determining device and driving support device |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006055076 | 2006-03-01 | ||
| JP2006276353A JP2007265377A (en) | 2006-03-01 | 2006-10-10 | Driver state determining device and driving support device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007265377A true JP2007265377A (en) | 2007-10-11 |
Family
ID=38638257
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006276353A Pending JP2007265377A (en) | 2006-03-01 | 2006-10-10 | Driver state determining device and driving support device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007265377A (en) |
Cited By (63)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008213823A (en) * | 2007-02-06 | 2008-09-18 | Denso Corp | Vehicle control unit |
| JP2009154673A (en) * | 2007-12-26 | 2009-07-16 | Denso Corp | Vehicular escaping support device and vehicular navigation system |
| JP2009176238A (en) * | 2008-01-28 | 2009-08-06 | Denso Corp | Air-conditioner for vehicle |
| JP2009223752A (en) * | 2008-03-18 | 2009-10-01 | Hyundai Motor Co Ltd | Drowsy driving risk determination device |
| JP2009245434A (en) * | 2008-03-28 | 2009-10-22 | Valeo Systemes Thermiques | Method and system for limiting use of vehicle according to awareness state of user |
| JP2009301492A (en) * | 2008-06-17 | 2009-12-24 | Toyota Motor Corp | Occupant protection apparatus |
| JP2010128649A (en) * | 2008-11-26 | 2010-06-10 | Nissan Motor Co Ltd | Awakening state determining device and awakening state determining method |
| WO2011004641A1 (en) * | 2009-07-09 | 2011-01-13 | アイシン精機株式会社 | State detecting device, state detecting method, and program |
| JP2011025851A (en) * | 2009-07-27 | 2011-02-10 | Autoliv Development Ab | Seatbelt control device |
| JP2011062465A (en) * | 2009-09-18 | 2011-03-31 | Mitsubishi Motors Corp | Driving support device |
| JP2011167398A (en) * | 2010-02-19 | 2011-09-01 | Toyota Motor Corp | Biological state determining apparatus |
| WO2011125166A1 (en) | 2010-04-05 | 2011-10-13 | トヨタ自動車株式会社 | Biological body state assessment device |
| US8068968B2 (en) | 2007-02-06 | 2011-11-29 | Denso Corporation | Vehicle travel control system |
| US8239015B2 (en) | 2008-09-19 | 2012-08-07 | Panasonic Corporation | Distraction detection apparatus, distraction detection method, and computer program |
| JP2012218592A (en) * | 2011-04-08 | 2012-11-12 | Nissan Motor Co Ltd | On-board equipment control device |
| JP2012252498A (en) * | 2011-06-02 | 2012-12-20 | Nissan Motor Co Ltd | Unsteady driving notification device |
| JP2012252497A (en) * | 2011-06-02 | 2012-12-20 | Nissan Motor Co Ltd | Driving support device and driving support method for vehicle |
| JP2013012029A (en) * | 2011-06-29 | 2013-01-17 | Nissan Motor Co Ltd | Arousal inducing device |
| JP2013052784A (en) * | 2011-09-05 | 2013-03-21 | Denso Corp | Driving support apparatus |
| JP2013109447A (en) * | 2011-11-18 | 2013-06-06 | Mitsubishi Motors Corp | Driving support device |
| KR101305129B1 (en) * | 2011-08-29 | 2013-09-12 | 현대자동차주식회사 | Intelligent assistance apparatus and methed for entertainment of driver |
| JP2014229123A (en) * | 2013-05-23 | 2014-12-08 | 学校法人常翔学園 | Awakening maintenance support apparatus |
| KR101490910B1 (en) | 2012-12-26 | 2015-02-11 | 현대자동차 주식회사 | The detecting method of drowsy driving |
| CN104363948A (en) * | 2012-06-15 | 2015-02-18 | 株式会社日立制作所 | Stimulus presentation system |
| JP2016012332A (en) * | 2014-06-27 | 2016-01-21 | 重井 晴雄 | Anti-doze system for driving which observes state of pupils or upper eyelids using line-of-sight tracking sensor so that driver of vehicle can be prevented from dozing when driver is about to doze during driving, thus senses change in state, and prevents driver from dozing by applying vibration to driver's body using vibration motor incorporated in seat |
| US9304513B2 (en) | 2010-06-16 | 2016-04-05 | Toyota Jidosha Kabushiki Kaisha | Driving assistance device |
| JP2016053821A (en) * | 2014-09-03 | 2016-04-14 | 三菱電機株式会社 | On-vehicle system |
| US9409517B2 (en) | 2013-12-11 | 2016-08-09 | Hyundai Motor Company | Biologically controlled vehicle and method of controlling the same |
| JP2016162015A (en) * | 2015-02-27 | 2016-09-05 | 本田技研工業株式会社 | Attention calling device for vehicle |
| JP2017033125A (en) * | 2015-07-30 | 2017-02-09 | いすゞ自動車株式会社 | Safe driving promotion device and safe driving promotion method |
| WO2017068880A1 (en) * | 2015-10-19 | 2017-04-27 | 株式会社デンソー | Motion estimation system, motion estimation method, and wearable device |
| JP2017158811A (en) * | 2016-03-09 | 2017-09-14 | パナソニックIpマネジメント株式会社 | Environment control system and environment control method |
| JP2017182557A (en) * | 2016-03-31 | 2017-10-05 | マツダ株式会社 | Driving support device |
| JP2017199279A (en) * | 2016-04-28 | 2017-11-02 | トヨタ自動車株式会社 | Drive consciousness estimation apparatus |
| JP2017220097A (en) * | 2016-06-09 | 2017-12-14 | 株式会社デンソー | Drive support device |
| US20180056863A1 (en) * | 2016-08-26 | 2018-03-01 | Mazda Motor Corporation | Driver's physical condition detection device and method |
| JP2018041408A (en) * | 2016-09-09 | 2018-03-15 | マツダ株式会社 | Vehicle driver abnormality notification device |
| JP2018041407A (en) * | 2016-09-09 | 2018-03-15 | マツダ株式会社 | Abnormality notification device for vehicle driver |
| WO2018147838A1 (en) * | 2017-02-08 | 2018-08-16 | Lin Zhuohua | Machine learning for olfactory mood alteration |
| US10150351B2 (en) | 2017-02-08 | 2018-12-11 | Lp-Research Inc. | Machine learning for olfactory mood alteration |
| JP2018201673A (en) * | 2017-05-31 | 2018-12-27 | いすゞ自動車株式会社 | Detection device |
| WO2019054168A1 (en) * | 2017-09-13 | 2019-03-21 | 株式会社オートネットワーク技術研究所 | Driving load computation device and computer program |
| JP2019099089A (en) * | 2017-12-07 | 2019-06-24 | 株式会社デンソー | Awakening maintaining device and control program |
| JP2019197522A (en) * | 2018-05-10 | 2019-11-14 | 韓國電子通信研究院Electronics and Telecommunications Research Institute | Driver condition recognition device and method based on travel state determination information |
| JP2020008888A (en) * | 2018-07-02 | 2020-01-16 | 株式会社デンソー | Accident warning device |
| CN110877516A (en) * | 2018-09-05 | 2020-03-13 | 上海蔚来汽车有限公司 | Fragrance controller, vehicle-mounted fragrance device, vehicle-mounted fragrance system and control method thereof |
| WO2020079990A1 (en) * | 2018-10-19 | 2020-04-23 | 株式会社デンソー | Obstacle degree calculating system, and driving guide system |
| CN111079476A (en) * | 2018-10-19 | 2020-04-28 | 上海商汤智能科技有限公司 | Driving state analysis method and device, driver monitoring system and vehicle |
| CN111071257A (en) * | 2018-10-18 | 2020-04-28 | 株式会社万都 | Emergency control device for vehicle |
| JP2020170383A (en) * | 2019-04-04 | 2020-10-15 | 株式会社デンソー | Driver state estimation device |
| WO2021006365A1 (en) * | 2019-07-05 | 2021-01-14 | 엘지전자 주식회사 | Vehicle control method and intelligent computing device for controlling vehicle |
| JP2021026762A (en) * | 2019-08-06 | 2021-02-22 | いすゞ自動車株式会社 | Determination device and determination method |
| CN112417945A (en) * | 2020-09-09 | 2021-02-26 | 嘉兴市纳杰微电子技术有限公司 | Distracted driving real-time monitoring method and device based on special neural network |
| JPWO2021157622A1 (en) * | 2020-02-05 | 2021-08-12 | ||
| WO2021166822A1 (en) * | 2020-02-19 | 2021-08-26 | いすゞ自動車株式会社 | Driving assistance device and driving assistance system |
| CN113347243A (en) * | 2021-05-31 | 2021-09-03 | 重庆工程职业技术学院 | Driving information recording system and method based on block chain |
| CN113574323A (en) * | 2019-04-22 | 2021-10-29 | 大金工业株式会社 | Air conditioning system |
| JP2022006635A (en) * | 2020-06-24 | 2022-01-13 | 三菱ロジスネクスト株式会社 | Cargo handling system and control method |
| WO2022185953A1 (en) * | 2021-03-01 | 2022-09-09 | シャープ株式会社 | Ion generator and method for suppressing drowsiness |
| CN115723524A (en) * | 2022-11-24 | 2023-03-03 | 重庆长安汽车股份有限公司 | Control method and system for releasing multifunctional fragrance for automobile, electronic equipment and storage medium |
| CN115782537A (en) * | 2018-03-26 | 2023-03-14 | 本田技研工业株式会社 | Internal environment adjusting device and internal environment adjusting method |
| WO2024053751A1 (en) * | 2022-09-06 | 2024-03-14 | 엘지전자 주식회사 | Driver monitoring device of vehicle and operation method thereof |
| DE102017007942B4 (en) | 2016-08-26 | 2024-06-13 | Mazda Motor Corporation | Device and method for detecting the physical condition of a driver |
-
2006
- 2006-10-10 JP JP2006276353A patent/JP2007265377A/en active Pending
Cited By (90)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8068968B2 (en) | 2007-02-06 | 2011-11-29 | Denso Corporation | Vehicle travel control system |
| JP2008213823A (en) * | 2007-02-06 | 2008-09-18 | Denso Corp | Vehicle control unit |
| JP2009154673A (en) * | 2007-12-26 | 2009-07-16 | Denso Corp | Vehicular escaping support device and vehicular navigation system |
| JP2009176238A (en) * | 2008-01-28 | 2009-08-06 | Denso Corp | Air-conditioner for vehicle |
| JP2009223752A (en) * | 2008-03-18 | 2009-10-01 | Hyundai Motor Co Ltd | Drowsy driving risk determination device |
| JP2009245434A (en) * | 2008-03-28 | 2009-10-22 | Valeo Systemes Thermiques | Method and system for limiting use of vehicle according to awareness state of user |
| JP2009301492A (en) * | 2008-06-17 | 2009-12-24 | Toyota Motor Corp | Occupant protection apparatus |
| US8239015B2 (en) | 2008-09-19 | 2012-08-07 | Panasonic Corporation | Distraction detection apparatus, distraction detection method, and computer program |
| JP2010128649A (en) * | 2008-11-26 | 2010-06-10 | Nissan Motor Co Ltd | Awakening state determining device and awakening state determining method |
| JP2011018240A (en) * | 2009-07-09 | 2011-01-27 | Aisin Seiki Co Ltd | Device and method for detecting state and program |
| US8786448B2 (en) | 2009-07-09 | 2014-07-22 | Aisin Seiki Kabushiki Kaisha | State detecting device, state detecting method, and non-transitory computer-readable medium |
| CN102473354A (en) * | 2009-07-09 | 2012-05-23 | 爱信精机株式会社 | State detecting device, state detecting method, and program |
| WO2011004641A1 (en) * | 2009-07-09 | 2011-01-13 | アイシン精機株式会社 | State detecting device, state detecting method, and program |
| KR101311552B1 (en) * | 2009-07-09 | 2013-09-26 | 아이신세이끼가부시끼가이샤 | State detecting device, state detecting method, and recording media |
| JP2011025851A (en) * | 2009-07-27 | 2011-02-10 | Autoliv Development Ab | Seatbelt control device |
| JP2011062465A (en) * | 2009-09-18 | 2011-03-31 | Mitsubishi Motors Corp | Driving support device |
| JP2011167398A (en) * | 2010-02-19 | 2011-09-01 | Toyota Motor Corp | Biological state determining apparatus |
| WO2011125166A1 (en) | 2010-04-05 | 2011-10-13 | トヨタ自動車株式会社 | Biological body state assessment device |
| US8866896B2 (en) | 2010-04-05 | 2014-10-21 | Toyota Jidosha Kabushiki Kaisha | Biological body state assessment device including drowsiness occurrence assessment |
| US10928818B2 (en) | 2010-06-16 | 2021-02-23 | Toyota Jidosha Kabushiki Kaisha | Driving assistance device |
| US11592816B2 (en) | 2010-06-16 | 2023-02-28 | Toyota Jidosha Kabushiki Kaisha | Driving assistance device |
| US9304513B2 (en) | 2010-06-16 | 2016-04-05 | Toyota Jidosha Kabushiki Kaisha | Driving assistance device |
| US9891622B2 (en) | 2010-06-16 | 2018-02-13 | Toyota Jidosha Kabushiki Kaisha | Driving assistance device |
| JP2012218592A (en) * | 2011-04-08 | 2012-11-12 | Nissan Motor Co Ltd | On-board equipment control device |
| JP2012252497A (en) * | 2011-06-02 | 2012-12-20 | Nissan Motor Co Ltd | Driving support device and driving support method for vehicle |
| JP2012252498A (en) * | 2011-06-02 | 2012-12-20 | Nissan Motor Co Ltd | Unsteady driving notification device |
| JP2013012029A (en) * | 2011-06-29 | 2013-01-17 | Nissan Motor Co Ltd | Arousal inducing device |
| KR101305129B1 (en) * | 2011-08-29 | 2013-09-12 | 현대자동차주식회사 | Intelligent assistance apparatus and methed for entertainment of driver |
| JP2013052784A (en) * | 2011-09-05 | 2013-03-21 | Denso Corp | Driving support apparatus |
| JP2013109447A (en) * | 2011-11-18 | 2013-06-06 | Mitsubishi Motors Corp | Driving support device |
| CN104363948A (en) * | 2012-06-15 | 2015-02-18 | 株式会社日立制作所 | Stimulus presentation system |
| US9888874B2 (en) | 2012-06-15 | 2018-02-13 | Hitachi, Ltd. | Stimulus presentation system |
| KR101490910B1 (en) | 2012-12-26 | 2015-02-11 | 현대자동차 주식회사 | The detecting method of drowsy driving |
| JP2014229123A (en) * | 2013-05-23 | 2014-12-08 | 学校法人常翔学園 | Awakening maintenance support apparatus |
| US9409517B2 (en) | 2013-12-11 | 2016-08-09 | Hyundai Motor Company | Biologically controlled vehicle and method of controlling the same |
| JP2016012332A (en) * | 2014-06-27 | 2016-01-21 | 重井 晴雄 | Anti-doze system for driving which observes state of pupils or upper eyelids using line-of-sight tracking sensor so that driver of vehicle can be prevented from dozing when driver is about to doze during driving, thus senses change in state, and prevents driver from dozing by applying vibration to driver's body using vibration motor incorporated in seat |
| JP2016053821A (en) * | 2014-09-03 | 2016-04-14 | 三菱電機株式会社 | On-vehicle system |
| JP2016162015A (en) * | 2015-02-27 | 2016-09-05 | 本田技研工業株式会社 | Attention calling device for vehicle |
| US9969406B2 (en) | 2015-02-27 | 2018-05-15 | Honda Motor Co., Ltd. | Attention calling system for vehicle |
| JP2017033125A (en) * | 2015-07-30 | 2017-02-09 | いすゞ自動車株式会社 | Safe driving promotion device and safe driving promotion method |
| JP2017077296A (en) * | 2015-10-19 | 2017-04-27 | 株式会社デンソー | Behavior estimation system, behavior estimation method, and wearable device |
| WO2017068880A1 (en) * | 2015-10-19 | 2017-04-27 | 株式会社デンソー | Motion estimation system, motion estimation method, and wearable device |
| JP2017158811A (en) * | 2016-03-09 | 2017-09-14 | パナソニックIpマネジメント株式会社 | Environment control system and environment control method |
| JP2017182557A (en) * | 2016-03-31 | 2017-10-05 | マツダ株式会社 | Driving support device |
| JP2017199279A (en) * | 2016-04-28 | 2017-11-02 | トヨタ自動車株式会社 | Drive consciousness estimation apparatus |
| US10640122B2 (en) | 2016-04-28 | 2020-05-05 | Toyota Jidosha Kabushiki Kaisha | Driving consciousness estimation device |
| JP2017220097A (en) * | 2016-06-09 | 2017-12-14 | 株式会社デンソー | Drive support device |
| CN107773247A (en) * | 2016-08-26 | 2018-03-09 | 马自达汽车株式会社 | Driver's health detection means and driver's health detection method |
| CN107773247B (en) * | 2016-08-26 | 2021-01-01 | 马自达汽车株式会社 | Driver physical condition detection device and driver physical condition detection method |
| US20180056863A1 (en) * | 2016-08-26 | 2018-03-01 | Mazda Motor Corporation | Driver's physical condition detection device and method |
| DE102017007966B4 (en) | 2016-08-26 | 2024-06-06 | Mazda Motor Corporation | Device and method for detecting the physical condition of a driver |
| DE102017007942B4 (en) | 2016-08-26 | 2024-06-13 | Mazda Motor Corporation | Device and method for detecting the physical condition of a driver |
| US10588549B2 (en) * | 2016-08-26 | 2020-03-17 | Mazda Motor Corporation | Driver's physical condition detection device and method |
| JP2018041407A (en) * | 2016-09-09 | 2018-03-15 | マツダ株式会社 | Abnormality notification device for vehicle driver |
| JP2018041408A (en) * | 2016-09-09 | 2018-03-15 | マツダ株式会社 | Vehicle driver abnormality notification device |
| US10150351B2 (en) | 2017-02-08 | 2018-12-11 | Lp-Research Inc. | Machine learning for olfactory mood alteration |
| WO2018147838A1 (en) * | 2017-02-08 | 2018-08-16 | Lin Zhuohua | Machine learning for olfactory mood alteration |
| JP2018201673A (en) * | 2017-05-31 | 2018-12-27 | いすゞ自動車株式会社 | Detection device |
| WO2019054168A1 (en) * | 2017-09-13 | 2019-03-21 | 株式会社オートネットワーク技術研究所 | Driving load computation device and computer program |
| JP2019099089A (en) * | 2017-12-07 | 2019-06-24 | 株式会社デンソー | Awakening maintaining device and control program |
| CN115782537A (en) * | 2018-03-26 | 2023-03-14 | 本田技研工业株式会社 | Internal environment adjusting device and internal environment adjusting method |
| JP2019197522A (en) * | 2018-05-10 | 2019-11-14 | 韓國電子通信研究院Electronics and Telecommunications Research Institute | Driver condition recognition device and method based on travel state determination information |
| JP7154959B2 (en) | 2018-05-10 | 2022-10-18 | 韓國電子通信研究院 | Apparatus and method for recognizing driver's state based on driving situation judgment information |
| JP2020008888A (en) * | 2018-07-02 | 2020-01-16 | 株式会社デンソー | Accident warning device |
| CN110877516A (en) * | 2018-09-05 | 2020-03-13 | 上海蔚来汽车有限公司 | Fragrance controller, vehicle-mounted fragrance device, vehicle-mounted fragrance system and control method thereof |
| CN111071257A (en) * | 2018-10-18 | 2020-04-28 | 株式会社万都 | Emergency control device for vehicle |
| KR102612925B1 (en) * | 2018-10-18 | 2023-12-13 | 주식회사 에이치엘클레무브 | Emergency controlling device for vehicle |
| KR20200046179A (en) * | 2018-10-18 | 2020-05-07 | 주식회사 만도 | Emergency controlling device for vehicle |
| JP2021516829A (en) * | 2018-10-19 | 2021-07-08 | 上▲海▼商▲湯▼智能科技有限公司Shanghai Sensetime Intelligent Technology Co., Ltd. | Driving condition analysis method and equipment, driver monitoring system and vehicle |
| WO2020079990A1 (en) * | 2018-10-19 | 2020-04-23 | 株式会社デンソー | Obstacle degree calculating system, and driving guide system |
| CN111079476A (en) * | 2018-10-19 | 2020-04-28 | 上海商汤智能科技有限公司 | Driving state analysis method and device, driver monitoring system and vehicle |
| CN111079476B (en) * | 2018-10-19 | 2024-03-26 | 上海商汤智能科技有限公司 | Driving state analysis method and device, driver monitoring system and vehicle |
| US11386679B2 (en) | 2018-10-19 | 2022-07-12 | Shanghai Sensetime Intelligent Technology Co., Ltd. | Driving state analysis method and apparatus, driver monitoring system and vehicle |
| JP2020170383A (en) * | 2019-04-04 | 2020-10-15 | 株式会社デンソー | Driver state estimation device |
| CN113574323A (en) * | 2019-04-22 | 2021-10-29 | 大金工业株式会社 | Air conditioning system |
| CN113574323B (en) * | 2019-04-22 | 2023-05-16 | 大金工业株式会社 | Air conditioning system |
| WO2021006365A1 (en) * | 2019-07-05 | 2021-01-14 | 엘지전자 주식회사 | Vehicle control method and intelligent computing device for controlling vehicle |
| JP7306332B2 (en) | 2019-08-06 | 2023-07-11 | いすゞ自動車株式会社 | Judgment device and judgment method |
| JP2021026762A (en) * | 2019-08-06 | 2021-02-22 | いすゞ自動車株式会社 | Determination device and determination method |
| JPWO2021157622A1 (en) * | 2020-02-05 | 2021-08-12 | ||
| WO2021157622A1 (en) * | 2020-02-05 | 2021-08-12 | パイオニア株式会社 | Assessment device, assessment method, and assessment program |
| CN115136221A (en) * | 2020-02-19 | 2022-09-30 | 五十铃自动车株式会社 | Driving support device and driving support system |
| JP2021131708A (en) * | 2020-02-19 | 2021-09-09 | いすゞ自動車株式会社 | Driving assistance device |
| WO2021166822A1 (en) * | 2020-02-19 | 2021-08-26 | いすゞ自動車株式会社 | Driving assistance device and driving assistance system |
| JP2022006635A (en) * | 2020-06-24 | 2022-01-13 | 三菱ロジスネクスト株式会社 | Cargo handling system and control method |
| CN112417945A (en) * | 2020-09-09 | 2021-02-26 | 嘉兴市纳杰微电子技术有限公司 | Distracted driving real-time monitoring method and device based on special neural network |
| WO2022185953A1 (en) * | 2021-03-01 | 2022-09-09 | シャープ株式会社 | Ion generator and method for suppressing drowsiness |
| CN113347243A (en) * | 2021-05-31 | 2021-09-03 | 重庆工程职业技术学院 | Driving information recording system and method based on block chain |
| WO2024053751A1 (en) * | 2022-09-06 | 2024-03-14 | 엘지전자 주식회사 | Driver monitoring device of vehicle and operation method thereof |
| CN115723524A (en) * | 2022-11-24 | 2023-03-03 | 重庆长安汽车股份有限公司 | Control method and system for releasing multifunctional fragrance for automobile, electronic equipment and storage medium |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2007265377A (en) | Driver state determining device and driving support device | |
| JP7352566B2 (en) | Information processing device, mobile device, method, and program | |
| US10875536B2 (en) | Coordinated vehicle response system and method for driver behavior | |
| JP6369487B2 (en) | Display device | |
| US11377094B2 (en) | System and method for responding to driver behavior | |
| US7948387B2 (en) | Drowsiness determination apparatus, program, and method | |
| US20140125474A1 (en) | Adaptive actuator interface for active driver warning | |
| JP6555647B2 (en) | Vehicle driving support system and vehicle driving support method | |
| JP2000268297A (en) | Safety drive evaluation device | |
| JP5568345B2 (en) | Safety confirmation support device and program | |
| JP6593712B2 (en) | Vehicle driving support system | |
| JP2013089250A (en) | Vehicle system and method for assessing and communicating condition of driver | |
| JP2003317197A (en) | Alarm system | |
| KR101500010B1 (en) | Sensing System of driver's sleepiness and tireness | |
| US20240000354A1 (en) | Driving characteristic determination device, driving characteristic determination method, and recording medium | |
| JP2005080970A (en) | Mind and body condition determining device for driver, and driving support apparatus for driver | |
| JP2014013496A (en) | Driving assistance device, and program | |
| Lenné et al. | 11 Driver State Monitoring for Decreased Fitness to Drive | |
| JP2022142614A (en) | Safety confirmation support device, safety confirmation support method, and safety confirmation support program | |
| JP2018013812A (en) | Driver state guide device and driver state guide program | |
| WO2021085414A1 (en) | Driving assistance device, evaluation device, driving assistance method, and driving assistance program | |
| JP7418683B2 (en) | Evaluation device, evaluation method | |
| JP7528492B2 (en) | Dangerous driving warning device, dangerous driving warning system, and dangerous driving warning method | |
| WO2023026553A1 (en) | Traffic flow simulation system and traffic flow simulation method | |
| JP2021071918A (en) | Drive support device, evaluation device, method for supporting drive, and drive support program |