JP2006509237A - インターベンショナルシミュレーション装置 - Google Patents
インターベンショナルシミュレーション装置 Download PDFInfo
- Publication number
- JP2006509237A JP2006509237A JP2004557049A JP2004557049A JP2006509237A JP 2006509237 A JP2006509237 A JP 2006509237A JP 2004557049 A JP2004557049 A JP 2004557049A JP 2004557049 A JP2004557049 A JP 2004557049A JP 2006509237 A JP2006509237 A JP 2006509237A
- Authority
- JP
- Japan
- Prior art keywords
- instrument
- carriage
- force
- actual
- instruments
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000004088 simulation Methods 0.000 title claims abstract description 41
- 238000001356 surgical procedure Methods 0.000 claims abstract description 19
- 230000033001 locomotion Effects 0.000 claims description 24
- 230000007246 mechanism Effects 0.000 claims description 23
- 238000001514 detection method Methods 0.000 claims description 15
- 230000005540 biological transmission Effects 0.000 claims description 10
- 238000000034 method Methods 0.000 claims description 8
- 230000003287 optical effect Effects 0.000 claims description 8
- 239000000725 suspension Substances 0.000 claims description 7
- 230000003321 amplification Effects 0.000 claims description 6
- 238000003199 nucleic acid amplification method Methods 0.000 claims description 6
- 239000000463 material Substances 0.000 claims description 5
- 238000012545 processing Methods 0.000 claims description 5
- 230000013011 mating Effects 0.000 claims description 3
- 238000010586 diagram Methods 0.000 description 5
- 238000005094 computer simulation Methods 0.000 description 4
- 238000012549 training Methods 0.000 description 4
- 238000011161 development Methods 0.000 description 3
- 238000003780 insertion Methods 0.000 description 3
- 230000037431 insertion Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 230000002093 peripheral effect Effects 0.000 description 3
- 230000008901 benefit Effects 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 230000002452 interceptive effect Effects 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 238000012360 testing method Methods 0.000 description 2
- 102100026278 Cysteine sulfinic acid decarboxylase Human genes 0.000 description 1
- 208000031481 Pathologic Constriction Diseases 0.000 description 1
- 238000002399 angioplasty Methods 0.000 description 1
- 210000004204 blood vessel Anatomy 0.000 description 1
- 239000011111 cardboard Substances 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 239000002872 contrast media Substances 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 238000002324 minimally invasive surgery Methods 0.000 description 1
- 239000008177 pharmaceutical agent Substances 0.000 description 1
- 229920000642 polymer Polymers 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 108010064775 protein C activator peptide Proteins 0.000 description 1
- 238000000275 quality assurance Methods 0.000 description 1
- 230000029058 respiratory gaseous exchange Effects 0.000 description 1
- 208000037804 stenosis Diseases 0.000 description 1
- 230000036262 stenosis Effects 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images








Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/016—Input arrangements with force or tactile feedback as computer generated output to the user
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B23/00—Models for scientific, medical, or mathematical purposes, e.g. full-sized devices for demonstration purposes
- G09B23/28—Models for scientific, medical, or mathematical purposes, e.g. full-sized devices for demonstration purposes for medicine
- G09B23/285—Models for scientific, medical, or mathematical purposes, e.g. full-sized devices for demonstration purposes for medicine for injections, endoscopy, bronchoscopy, sigmoidscopy, insertion of contraceptive devices or enemas
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Mathematical Analysis (AREA)
- Radiology & Medical Imaging (AREA)
- Chemical & Material Sciences (AREA)
- Human Computer Interaction (AREA)
- Medical Informatics (AREA)
- Medicinal Chemistry (AREA)
- Algebra (AREA)
- Computational Mathematics (AREA)
- Pulmonology (AREA)
- Mathematical Optimization (AREA)
- Mathematical Physics (AREA)
- Pure & Applied Mathematics (AREA)
- Business, Economics & Management (AREA)
- Educational Administration (AREA)
- Educational Technology (AREA)
- Instructional Devices (AREA)
Abstract
Description
・ユーザが同時に少なくと3つの独立した器具を使って動かすことができること。
・実際の器具を利用出来ること。
・より良好なフィードバックシステムを通して、よりリアルな感覚が得られること。
・ユーザからの特別な相互作用または制御なしで、実際の手術のように器具を挿入することや、引き抜くことができること。
・対応するプリントカードボードPCBに配置された処理ユニット10。
・通信ユニット12。
・電源14。
・少なくとも3つのキャリッジ16A〜16C。各キャリッジ16は同じ技術的特徴を有する。これらキャリッジ16C〜16Cは後述する異なる種類の器具をロックするように配置されている。
・キャリッジ16A〜16Cを駆動するためのモータおよび変速機18。
・キャリッジ16A〜16Cが移動できるトラック20。この実施例ではこのトラックは共通トラックであるが、他の実施例では、例えば平行な3つのトラックなどとすることができる。
・入力パイプ24が設けられた開口部22。
・入れ子式パイプ26A〜26Cの形態をした相互接続部材26。図2参照。
・カバー28。
・PC内のソフトウェアの形態をした制御ユニット30。
CDV=キャリッジ要求速度であり、
CAP=キャリッジの実際の位置であり、
PCAP=前のキャリッジの実際の位置であり、
PCAV=前のキャリッジの実際の速度であり、
C1とC2とは定数である。
増幅度が大きい場合、ユーザは0の力を経験する。増幅度が小さい場合、ユーザは大きい抵抗力を経験する。このように、摩擦はユーザが経験する抵抗力となり、“パッシブな力のフィードバック”が行われる(図9参照)。
K=C1*(1−C2*DF)
K=ループ増幅度、F3(s)であり、
DF=要求の力であり、
C1とC2とは定数である。
・押されたペダル位置および解放されたペダル位置を測定すること。
・造影剤注射器からの流れを測定すること。
・バルーンを膨張させるための圧力ポンプからの圧力を測定すること。
・測定された値をシミュレーションユニット90へ送ること。
・シミュレーションユニット90からの、器具に対する力およびトルクを受信すること。
・受信された力のおよびトルクに従って、器具の長手方向および回転方向へ力のフィードバックを行うこと。
・特殊器具からの信号を測定すること。
Claims (34)
- 多数の実際の器具、好ましくは少なくとも2つの実際の器具を受け入れるようになっている、インターベンショナル手術をシミュレートするためのシミュレーションシステムにおける装置(100)において、該装置(100)が、
前記実際の器具の数に対応する数の可動キャリッジ(16A〜16C)と、
トラック(20)と、
相互接続部材(26)とを備え、
前記相互接続部材(26)が前記キャリッジ(16A〜16C)を直列に相互接続し、各キャリッジ(16A〜16C)に前記実際の器具の受け入れを可能にするための開口部が設けられており、各キャリッジ(16A〜16C)が更に少なくとも1つの実際の器具を受け入れ、かつロックするための部材と、前記器具からの運動を受けると共にシミュレーション特性に関して前記実際の器具へフィードバックされる力を発生するための部材とを備えることを特徴とする、シミュレーションシステムにおける装置(100)。 - 前記開口部(22)が前記相互接続部材(26)内に設けられていることを特徴とする、請求項1記載の装置。
- 前記相互接続部材(26)が入れ子式パイプであることを特徴とする、請求項1記載の装置。
- 各キャリッジ(16A〜16B)が前記相互接続部材(26)を通して挿入される前記実際の器具の種類を検出するための検出機構(48)を含むことを特徴とする、請求項1記載の装置。
- 前記装置(100)が前記キャリッジ(16A〜16C)の運動を測定すると共に速度制御ループ(86)および位置制御ループ(88)により前記運動を制御するための制御ユニット(30)に接続されていることを特徴とする、請求項1記載の装置。
- 前記キャリッジ(16A〜16C)が前記トラック(20)に沿って移動するように配置されていることを特徴とする、請求項1記載の装置。
- 前記キャリッジ(16)が実際の位置およびシミュレートされた位置を有し、キャリッジの実際の位置がスケールテーブルからシミュレートされたキャリッジ位置を決定することを特徴とする、請求項1記載の装置。
- 前記キャリッジ(16A〜16C)が前記トラック(20)に沿って駆動するための変速機(18)を介して接続されていることを特徴とする、請求項1記載の装置。
- 前記キャリッジ(16)にトルクホイール(52)内に配置されたクランクブロック(74)が設けられていることを特徴とする、請求項1記載の装置。
- 前記クランクブロック(74)に嵌合表面が設けられており、この嵌合表面が器具ワイヤをグリップするコレット(70)に押圧されていることを特徴とする、請求項1記載の装置。
- 前記キャリッジ(16A〜16C)に配置されたシャーシ(32)と懸架プレート(38)との間の力を力センサ(40)によって測定することを特徴とする、請求項1記載の装置。
- 前記キャリッジ(16)に、キャリッジ(16)内の器具の存在を検出する検出部材(48)が設けられていることを特徴とする、請求項1記載の装置。
- 前記検出部材(48)が各実際の器具の種類を検出するように配置されていることを特徴とする、請求項1記載の装置。
- 前記実際の器具が次の特性、すなわち厚み、カラー、構造、材料、識別証および/またはバーコードのうちの少なくとも1つに関して前記種類に分類されることを特徴とする、請求項13記載の装置。
- 前記検出部材(48)が光センサであることを特徴とする、請求項12記載の装置。
- 前記開口部(22)と第1キャリッジ(16A)との間に第1相互接続部材(26A)が配置されており、第1キャリッジ(16A)と第2キャリッジ(16B)との間に第2相互接続部材(26B)が配置されており、第2キャリッジ(16B)と第3キャリッジ(16C)との間に第3相互接続部材(26C)が配置されていることを特徴とする、請求項1記載の装置。
- 器具の長手方向の運動および回転運動を測定するための処理ユニット(10)を含むことを特徴とする、請求項1記載の装置。
- 実際の器具の長手方向および回転方向に力のフィードバックを行う処理ユニット(10)を備えることを特徴とする、請求項1記載の装置。
- 前記実際の器具の端部または一部をシミュレートすることを特徴とする、請求項1記載の装置。
- 器具をクランプするためのロッキング部材(44)を備え、該ロッキング部材(44)が中央壁(42)に取り付けられていることを特徴とする、請求項1記載の装置。
- 前記ロッキング部材(44)がトルクを加えるための部材を含むことを特徴とする、請求項1記載の装置。
- 前記クランクブロック(74)がトルクホイール(52)内に設けられており、該クランクブロック(74)が該トルクホイール(52)に対して長手方向に移動し、かつ回転方向に固定されていることを特徴とする、請求項1記載の装置。
- 多数の実際の器具、好ましくは少なくとも2つの実際の器具を受け入れるようになっている、シミュレーションシステム内における装置(100)によるインターベンショナル手術をシミュレートする方法において、該装置は、
前記実際の器具の数に対応する数の可動キャリッジ(16A〜16C)と、
トラック(20)と、
相互接続部材(26)とを備え、
前記方法は、多数の実際の器具を前記装置(100)に挿入するステップと、少なくとも1つの器具を受けかつロックすることにより直列に相互接続された各キャリッジによって前記実際の器具を受けるステップとを備え、各キャリッジ(16A〜16C)が前記実際の器具からの運動を受けると共にシミュレーション特性に関して前記実際の器具へフィードバックされる力を発生するための部材とを更に備えることを特徴とする、インターベンショナル手術をシミュレートする方法。 - 少なくとも第1および第2の変位可能な部材(16A〜16C)を備えた、シミュレータシステム、好ましくはインターベンショナル治療シミュレータシステムにおける装置であって、制御システムが、
・前記第1の変位可能な部材(16A〜16C)の速度を設定値(CDV)に向けて制御する第1コントローラ(F1(s))と、
・前記第2の前の変位可能な部材の位置の誤差(CAP)と速度(PCAV)とを組み合わせ、第1の部材の設定速度にするための第2コントローラ(F2(s))とを備え、該第2のコントローラ(F2)がCDV=C1*(CAP−PCAP)+C2*PCAV(ここでC1とC2とは定数である)に制御することを特徴とする、請求項1乃至22のいずれか1に記載の装置。 - シミュレートされる実際の器具を検出するための機構を備え、前記機構が前記実際の器具を識別するための識別手段を含むことを特徴とする、シミュレータシステム、好ましくはインターベンショナル治療シミュレータシステムにおける、請求項1乃至22のいずれか1に記載の装置。
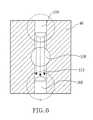
- 器具を検出するための前記機構が少なくとも1つのIR(赤外線)ダイオード(104)と、少なくとも1つのIRフォトトランジスタ(106)とを備えることを特徴とする、請求項25記載のインターベンショナル治療。
- 前記識別手段が前記実際の器具の厚み、カラー、構造、材料、識別証および/またはバーコードのうちの少なくとも1つから成ることを特徴とする、請求項25記載のインターベンショナル治療。
- シミュレートされる実際の器具を受け、かつロックするための部材と、力センサ(40)を含む制御ユニット(30)とを更に備え、前記制御ユニット(30)が力の要求値(DF)に向かって制御を行い、器具でユーザが経験する力を力センサ(40)によって測定し、力センサ(40)からの信号を設定された力に向けて力フィードバック制御ループ(102)内でフィードバックすることを特徴とする、シミュレータシステム、好ましくはインターベンショナル治療シミュレータシステムにおける請求項1乃至22のいずれか1に記載の装置。
- シミュレートされた実際の器具における抵抗力を発生するための抵抗力発生機構を備え、該抵抗力発生機構が制御ユニット(30)と、力センサ(40)と、ある方向に器具受け部材(16)を駆動するためのアクチュエータ装置を制御するための力フィードバック制御ループ(102)と、内側力制御ループ(112)とを備え、
前記力センサが前記抵抗力を測定するように配置されており、力センサからの信号が前記内側力制御ループ(112)内でフィードバックされ、該内側力制御ループが前記制御ユニットによって提供されるループ増幅度(K)によって前記制御ユニットおよび前記アクチュエータを制御する前記内側力制御ループ(112)によって定められる設定された力の値(SF)に向かって制御することを特徴とする、シミュレータシステム、好ましくはインターベンショナル治療シミュレータシステムにおける、請求項1乃至22のいずれか1に記載の装置。 - 前記制御ユニット(30)が前記抵抗力を得るように前記ループ増幅度(K)を制御することを特徴とする、請求項29記載のシミュレータシステム。
- 前記制御ユニット(30)が前記抵抗力を得るように前記設定された力(SF)を制御することを特徴とする、請求項29または30記載のシミュレータシステム。
- シミュレートされた実際の器具における抵抗力を発生するための抵抗力発生機構と、器具の運動を測定し、実際の器具に力をフィードバックするための装置内に前記実際の器具の一部を受け入れ、かつ固定するための受入固定機構を備え、該受入固定機構が前記実際の器具をクランプするための部材を含むことを特徴とする、シミュレータシステム、好ましくはインターベンショナル治療シミュレータシステムにおける請求項1乃至22のいずれか1に記載の装置。
- トルクホイール(52)内に配置されたクランクブロック(74)を備え、前記クランクブロック(74)が前記トルクホイール(52)内で長手方向に移動自在であることを特徴とする、請求項32記載の受入固定機構。
- 前記クランクブロック(74)に嵌合表面が設けられており、嵌合表面が前記器具部をグリップするコレット(70)に押圧されていることを特徴とする、請求項33記載の受入固定機構。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US43034502P | 2002-12-03 | 2002-12-03 | |
| SE0203568A SE526077C2 (sv) | 2002-12-03 | 2002-12-03 | En simuleringsanordning för invasiv kirurgi |
| PCT/SE2003/001891 WO2004051602A1 (en) | 2002-12-03 | 2003-12-03 | An interventional simulation device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006509237A true JP2006509237A (ja) | 2006-03-16 |
| JP4551769B2 JP4551769B2 (ja) | 2010-09-29 |
Family
ID=32473850
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004557049A Expired - Lifetime JP4551769B2 (ja) | 2002-12-03 | 2003-12-03 | インターベンショナルシミュレーション装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US7520749B2 (ja) |
| EP (1) | EP1576565B1 (ja) |
| JP (1) | JP4551769B2 (ja) |
| AU (1) | AU2003283930A1 (ja) |
| WO (1) | WO2004051602A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012181363A (ja) * | 2011-03-01 | 2012-09-20 | Morita Mfg Co Ltd | 医療用実習装置 |
Families Citing this family (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU2003283932A1 (en) * | 2002-12-03 | 2004-06-23 | Mentice Ab | An interventional simulator system |
| SE525157C2 (sv) * | 2002-12-03 | 2004-12-14 | Mentice Ab | Simuleringssystem för invasiv kirurgi |
| SE0203567D0 (sv) * | 2002-12-03 | 2002-12-03 | Mentice Ab | An interventional simulator control system |
| US7455523B2 (en) * | 2004-06-14 | 2008-11-25 | Medical Simulation Corporation | Medical simulation system and method |
| US7917349B2 (en) * | 2005-06-17 | 2011-03-29 | Fei Company | Combined hardware and software instrument simulator for use as a teaching aid |
| EP1903537A3 (en) * | 2005-07-20 | 2008-06-11 | Richstone Consulting LLC | A system and a method for simulating a manual interventional operation by a user in a medical procedure |
| US8005659B2 (en) * | 2007-07-06 | 2011-08-23 | Immersion Medical, Inc. | Simulation of coupled objects |
| US8442806B2 (en) * | 2010-03-03 | 2013-05-14 | Immersion Medical, Inc. | Systems and methods for simulations utilizing a virtual coupling |
| US10617478B1 (en) | 2011-01-03 | 2020-04-14 | Smith & Nephew Orthopedics AG | Surgical implement selection process |
| US9651412B2 (en) | 2011-01-31 | 2017-05-16 | Sage Vision Inc. | Bottle dispenser having a digital volume display |
| US20140002642A1 (en) | 2012-06-15 | 2014-01-02 | Elmar SWIEGOT | Absolute position detection |
| US20150199920A1 (en) * | 2014-01-10 | 2015-07-16 | Case Western Reserve University | Systems and methods for operating room simulation training |
| USD761438S1 (en) | 2014-01-17 | 2016-07-12 | Cardiovascular Systems, Inc. | Surgical simulator device |
| USD746239S1 (en) | 2014-01-17 | 2015-12-29 | Cardiovascular Systems, Inc. | Control holder |
| US9589484B2 (en) | 2014-01-24 | 2017-03-07 | Cardiovascular Systems, Inc. | Simulation device |
| WO2017030435A1 (en) | 2015-08-20 | 2017-02-23 | Universiti Putra Malaysia | A multi port haptic interface simulator |
| US20170249865A1 (en) * | 2016-02-26 | 2017-08-31 | Cae Healthcare Canada Inc. | Apparatus for simulating insertion of an elongated instrument into a structure providing axial rotating connection of the elongated instrument to a carriage |
| CA2921852C (en) * | 2016-02-26 | 2016-11-29 | Cae Healthcare Canada Inc. | Apparatus for simulating insertion of an elongated instrument into a structure and medical insertion simulator |
| CA2921848C (en) * | 2016-02-26 | 2017-07-18 | Cae Healthcare Canada Inc. | Apparatus for simulating insertion of an elongated instrument into a structure and medical insertion simulator |
| US10810907B2 (en) | 2016-12-19 | 2020-10-20 | National Board Of Medical Examiners | Medical training and performance assessment instruments, methods, and systems |
| US11501661B2 (en) * | 2018-03-29 | 2022-11-15 | Cae Healthcare Canada Inc. | Method and system for simulating an insertion of an elongated instrument into a subject |
| EP4009307B1 (en) | 2020-12-04 | 2023-02-22 | Medical Simulation Technologies Sp. z o.o. | Device and system for simulating transcatheter operations |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO1999039317A1 (en) * | 1998-01-28 | 1999-08-05 | Ht Medical Systems, Inc. | Interface device and method for interfacing instruments to medical procedure simulation system |
| EP0970714A2 (en) * | 1998-07-10 | 2000-01-12 | Mitsubishi Denki Kabushiki Kaisha | Actuator for independent axial and rotational actuation of a catheter or similar elongated object |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5805140A (en) * | 1993-07-16 | 1998-09-08 | Immersion Corporation | High bandwidth force feedback interface using voice coils and flexures |
| US5882206A (en) * | 1995-03-29 | 1999-03-16 | Gillio; Robert G. | Virtual surgery system |
| US5800179A (en) | 1996-07-23 | 1998-09-01 | Medical Simulation Corporation | System for training persons to perform minimally invasive surgical procedures |
| AU4249597A (en) | 1996-09-04 | 1998-03-26 | Ht Medical Systems, Inc. | Interventional radiology interface apparatus and method |
| US5828197A (en) * | 1996-10-25 | 1998-10-27 | Immersion Human Interface Corporation | Mechanical interface having multiple grounded actuators |
| IL123073A0 (en) * | 1998-01-26 | 1998-09-24 | Simbionix Ltd | Endoscopic tutorial system |
| GB2349731B (en) * | 1998-01-28 | 2003-06-04 | Ht Medical Systems Inc | Interface device and method for interfacing instruments to vascular access simulation systems |
| US7056123B2 (en) * | 2001-07-16 | 2006-06-06 | Immersion Corporation | Interface apparatus with cable-driven force feedback and grounded actuators |
| US6785572B2 (en) * | 2001-11-21 | 2004-08-31 | Koninklijke Philips Electronics, N.V. | Tactile feedback and display in a CT image guided robotic system for interventional procedures |
| EP1472661B1 (en) * | 2002-01-08 | 2008-08-27 | KEYMED (MEDICAL & INDUSTRIAL EQUIPMENT) LIMITED | A dummy medical instrument for use in a simulator |
-
2003
- 2003-12-03 AU AU2003283930A patent/AU2003283930A1/en not_active Abandoned
- 2003-12-03 WO PCT/SE2003/001891 patent/WO2004051602A1/en active Application Filing
- 2003-12-03 JP JP2004557049A patent/JP4551769B2/ja not_active Expired - Lifetime
- 2003-12-03 US US10/538,006 patent/US7520749B2/en active Active
- 2003-12-03 EP EP03776146.7A patent/EP1576565B1/en not_active Expired - Lifetime
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO1999039317A1 (en) * | 1998-01-28 | 1999-08-05 | Ht Medical Systems, Inc. | Interface device and method for interfacing instruments to medical procedure simulation system |
| EP0970714A2 (en) * | 1998-07-10 | 2000-01-12 | Mitsubishi Denki Kabushiki Kaisha | Actuator for independent axial and rotational actuation of a catheter or similar elongated object |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012181363A (ja) * | 2011-03-01 | 2012-09-20 | Morita Mfg Co Ltd | 医療用実習装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4551769B2 (ja) | 2010-09-29 |
| US20060127864A1 (en) | 2006-06-15 |
| EP1576565B1 (en) | 2018-07-11 |
| EP1576565A1 (en) | 2005-09-21 |
| US7520749B2 (en) | 2009-04-21 |
| AU2003283930A1 (en) | 2004-06-23 |
| WO2004051602A1 (en) | 2004-06-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4551769B2 (ja) | インターベンショナルシミュレーション装置 | |
| US6535714B2 (en) | Method, system, and apparatus for medical device training | |
| US6470302B1 (en) | Interface device and method for interfacing instruments to vascular access simulation systems | |
| US8550821B2 (en) | Simulation system for arthroscopic surgery training | |
| US6538634B1 (en) | Apparatus for the simulation of image-guided surgery | |
| Tuggy | Virtual reality flexible sigmoidoscopy simulator training: impact on resident performance | |
| Issenberg et al. | Simulation and new learning technologies | |
| Rhienmora et al. | Intelligent dental training simulator with objective skill assessment and feedback | |
| US6375471B1 (en) | Actuator for independent axial and rotational actuation of a catheter or similar elongated object | |
| Deutsch et al. | Rehabilitation of musculoskeletal injuries using the Rutgers ankle haptic interface: three case reports | |
| US20090305213A1 (en) | Simulationsvorrichtung zum simulieren von eindringvorgängen | |
| WO1999042978A1 (en) | Method and apparatus for surgical training and simulating surgery | |
| WO2007068050A1 (en) | Simulator and method | |
| Moo-Young et al. | Development of unity simulator for epidural insertion training for replacing current lumbar puncture simulators | |
| Crossan et al. | A horse ovary palpation simulator for veterinary training | |
| CN100392686C (zh) | 干预模拟设备 | |
| Li et al. | Enhanced epidural tissue perception for pediatric patients by an interactive lumbar puncture simulator | |
| Nistor et al. | Immersive training and mentoring for laparoscopic surgery | |
| Raspolli et al. | HERMES: an angioplasty surgery simulator | |
| Dumas et al. | Haptic feedback tuning in colonoscopy simulation | |
| WO2024154647A1 (ja) | 学習方法、及び、学習システム | |
| Pepley | Simulation of Needle Insertion Procedures | |
| Norkhairani et al. | Simulation for laparoscopy surgery with haptic element for medical students in HUKM: a preliminary analysis | |
| Cline et al. | Human performance metrics for a virtual reality simulator to train chest tube insertion | |
| English et al. | Enhancing user presence in a chest tube simulator by Joining virtual reality with a mannequin |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060911 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090210 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20090427 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20090508 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20090608 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090624 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20090626 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090818 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20091112 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20091119 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091211 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100112 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100409 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100511 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20100610 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20100615 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100712 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 4551769 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130716 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |