JP2006317418A - Image measuring device, image measurement method, measurement processing program, and recording medium - Google Patents
Image measuring device, image measurement method, measurement processing program, and recording medium Download PDFInfo
- Publication number
- JP2006317418A JP2006317418A JP2005143317A JP2005143317A JP2006317418A JP 2006317418 A JP2006317418 A JP 2006317418A JP 2005143317 A JP2005143317 A JP 2005143317A JP 2005143317 A JP2005143317 A JP 2005143317A JP 2006317418 A JP2006317418 A JP 2006317418A
- Authority
- JP
- Japan
- Prior art keywords
- image
- measured
- straight line
- measurement
- intersection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images













Landscapes
- Length Measuring Devices By Optical Means (AREA)
- Measurement Of Optical Distance (AREA)
Abstract
Description
本発明は物体・形状の寸法を撮像画像に基づいて計測する画像計測装置、画像計測方法及び計測処理プログラムが記録された記録媒体に関する。 The present invention relates to an image measuring apparatus, an image measuring method, and a recording medium on which a measurement processing program is recorded, which measures the size of an object / shape based on a captured image.
従来、3次元物体形状の画像計測方法として、各種のレンジファインダー計測法やステレオ写真計測法が知られている。ステレオ画像計測は、同一の被写体を異なる2つの視点から撮像し、視点間の視差により三角測量の原理に基づいて被計測点の位置を計測する方法、例えば、特許文献1がある。
Conventionally, as a method for measuring an image of a three-dimensional object shape, various range finder measurement methods and stereo photo measurement methods are known. Stereo image measurement includes, for example,
近年、デジタルカメラが普及し、測量分野においても手軽に利用されるようになってきている。デジタルカメラにより撮像された画像に基づいて物体形状の寸法を計測すると例として、特許文献2、3、4がある。特許文献2は、パルス変調されたレーザー光を被写体に照射し、その反射光を受光して距離を計測する測距部、方位センサ、傾斜角センサなどを備えた構成で計測点間の斜距離、水平角など通常の測量装置が有する測距装置を提案している。また、特許文献3は、予め寸法が既知の基準矩形体を被計測体とともに撮像し、一旦撮像された画像をパーソナルコンピュータに取り込み、計測したい箇所を入力指定して実寸法を得るという提案である。特許文献4は、オートフォーカス機能を用いての物体寸法計測可能とするデジタルカメラの例である。被測定点となる被写体中の2つのエッジをフォーカスエリア内に含まれるように撮像された画像に基づいて物体間の寸法を得るという提案である。
In recent years, digital cameras have become widespread and are easily used in the surveying field.
また、特許文献5は、単眼カメラで矩形平面に対する撮像面の姿勢パラメータの算出方法及び矩形平面上に指示した点の座標位置を検出するという提案である。実空間内における3つの姿勢パラメータは、矩形形状を特徴付ける4個直角部の点から算出できるというものである。
しかしながら、上記従来例には以下のような課題がある。
ステレオ写真計測法は、左右の視線方向を決める際、右画像の中に見えている点が、左画像のどこに対応しているのか、いわゆる対応点決定(マッチング処理))が非常に困難であり、対応点の決定にあいまいさが残るという問題がある。また、煩雑な計算処理をしなければならず、装置が大型化し、コストも高くなるという問題も生じる。
However, the conventional example has the following problems.
In the stereo photo measurement method, when determining the left and right gaze directions, it is very difficult to determine where the points in the right image correspond to in the left image, so-called corresponding point determination (matching processing). There is a problem that ambiguity remains in the determination of corresponding points. In addition, complicated calculation processing must be performed, resulting in a problem that the apparatus becomes large and the cost is high.
特許文献1は、ステレオ写真法の対応点付けの困難さをレーザー測距による距離データの評価関数の設定を行わなければならず、精密に3次元計測は実現できても装置が大型化し煩雑な演算を行う必要がある。
According to
特許文献2は、撮像手段には姿勢センサを設ける必要があるのでコストが高くなると言う欠点がある。さらに、測定値はモニターに表示された画像上で2つの測定点を指示することによって、寸法を算出する方法であるので、小さいモニターでは指示する作業が煩わしいという問題が生じる。
特許文献3は、実寸法が既知の基準体を被写体とともに撮像することが必要で、危険な場所や手の届かないところの測定は不可能である。さらに、撮像した画像は一旦メディアに記録しておき、あとで撮像画像に基づいてディスプレイを見ながらコンピュータ処理する方法であるので、リアルタイムに寸法を得ることが出来ないという問題がある。
In
特許文献4は、2枚の撮像画像を取得した画像間で他の画像のフォーカスエリアに相当する領域をパターンマッチング検索することによって領域を抽出する際、被検索画像との焦点距離補正している工夫をしている。しかしながら、これら2枚の撮像画像は、同一視点撮像したことが前提になっており、実用的に耐えうる寸法精度を得ることは出来ないという問題がある。 Patent Document 4 corrects a focal length with a search target image when extracting a region by performing pattern matching search on a region corresponding to a focus area of another image between two captured images. I am devised. However, these two captured images are based on the premise that they are captured from the same viewpoint, and there is a problem that dimensional accuracy that can be practically used cannot be obtained.
特許文献5は、矩形面上の指示位置の座標を算出するために、撮像画像の矩形を特徴付ける直角部を有する4個の座標値から姿勢パラメータを算出しているので、物品形状を画像計測する時には4点全て撮像することはできないという問題がある。 Since Patent Document 5 calculates posture parameters from four coordinate values having right-angled portions that characterize the rectangle of the captured image in order to calculate the coordinates of the designated position on the rectangular surface, the shape of the article is image-measured. There is a problem that sometimes all four points cannot be imaged.
本発明の目的は、計測基準体や煩雑な演算を必要とせず、被計測体の定性的形状情報のみで、演算負荷のない“その場”寸法計測を可能とする小型で安価な画像計測装置、画像計測方法、計測処理プログラム及び記録媒体を提供する。 An object of the present invention is to provide a small and inexpensive image measuring device that does not require a measurement reference body or complicated calculation, and can perform “in-situ” dimension measurement without calculation load only by qualitative shape information of a measured object. An image measurement method, a measurement processing program, and a recording medium are provided.
本発明は、上記課題を解決するために、本発明の請求項1は、被計測体の撮像画像に基づいて寸法計測する画像計測装置であって、1対の平行直線部と該平行直線部と直交する直線部とを有する被計測体と、前記直線部を指定する基準線が設けられた被計測部指定手段と、前記被計測部指定手段により前記直線部を指定した状態で前記被計測体を撮像する撮像手段と、前記撮像手段と前記被計測体上の被計測点との距離を計測する距離計測手段と、前記撮像手段により撮像された画像に基づいて直線成分を検出する直線検出手段と前記直線検出手段により検出された直線と前記被計測部指定手段により指定された直線部との交点座標を特定する交点座標特定手段とを有した画像処理手段と、前記画像処理手段により特定された交点座標に基づいて、前記被計測体を特徴付ける平面形成し、前記撮像面に対する前記平面の姿勢パラメータを算出する姿勢演算手段と、前記姿勢演算手段により算出した姿勢パラメータと前記距離計測手段により検出された距離とに基づいて、前記被計測直線の寸法を演算する寸法演算手段とを備えたことを特徴とする。 In order to solve the above problems, the present invention provides an image measuring apparatus for measuring dimensions based on a captured image of an object to be measured, wherein a pair of parallel linear portions and the parallel linear portions A measurement object having a straight line portion orthogonal to the measurement object, a measurement target specifying means provided with a reference line for specifying the straight line portion, and the measurement target in a state where the straight line portion is specified by the measurement target specifying means. Imaging means for imaging a body; distance measuring means for measuring a distance between the imaging means and a measurement point on the object to be measured; and linear detection for detecting a linear component based on an image captured by the imaging means And an image processing means having an intersection coordinate specifying means for specifying an intersection coordinate between the straight line detected by the straight line detection means and the straight line portion specified by the measured part specifying means, and specified by the image processing means Based on the intersection coordinates Forming a plane characterizing the object to be measured, calculating an attitude parameter of the plane with respect to the imaging surface, an attitude parameter calculated by the attitude calculation means, and a distance detected by the distance measurement means And a dimension calculating means for calculating the dimension of the straight line to be measured.
本発明の請求項2は、2つの異なる視点から撮像した1対の撮像画像に基づいて、被計測体の寸法計測する画像計測装置であって、1対の平行直線部と該平行直線部と直交する被計測直線部とを有する被計測体と、前記被計測直線部を指定する基準線が設けられた被計測部指定手段と、前記被計測部指定手段により指定された前記被計測直線部の一方を撮像する撮像手段と、前記撮像手段と前記被計測体上の被計測点との距離を計測する距離計測手段と、前記撮像手段により撮像された画像に基づいて、検出された直線成分と前記被計測部指定手段により指定された被計測直線との交点座標を特定する画像処理手段と、前記画像処理手段により特定された交点座標に基づいて、被計測体を特徴付ける平面を形成し、前記撮像面に対する前記平面の姿勢パラメータを算出する姿勢演算手段と、前記姿勢演算手段及び前記距離計測手段によりそれぞれ算出した第1及び第2の画像に対応する姿勢パラメータと距離データとに基づいて、前記被計測直線上の交点間寸法を演算する寸法演算手段と、前記寸法演算手段により演算された交点間寸法値に基づいて、前記第1及び第2の画像間の対応点を特定するマッチング処理手段を備えたことを特徴とする。
本発明の請求項3は、撮像された画像に基づいて、被計測体の平面姿勢を計測する画像計測装置であって、1対の平行直線部と該平行直線部と直交する直線部とを有する被計測体と、前記被計測体の計測部を撮像レンズの光軸で指示できる被計測部指定手段と、前記被計測部指定手段により指示された前記被計測体を撮像する撮像手段と、前記撮像手段により取得された撮像画像に基づいて、前記光軸に一致させた撮像面の中心を原点として被計測体を特徴付ける交点座標を算出する画像処理手段と、前記画像処理手段により得られた交点座標に基づいて、被計測体を特徴付ける平面を形成し、前記撮像面に対する前記平面の姿勢パラメータを演算する姿勢演算手段とを備えたことを特徴とする。
本発明の請求項12は、平行直線部と該平行直線部と直交する直線部とを有する被計測体を被計測部指定手段により前記直線部を指定した状態で、撮像された撮像画像に基づいて被計測体の寸法を計測する画像計測方法であって、距離計測手段により撮像手段と被計測点との距離を計測するステップと、撮像手段により取得した画像上の直線成分を検出し、検出された直線と前記指定された直線部との交点座標を特定する交点座標特定する画像処理ステップと、前記画像処理ステップにより特定された交点座標に基づいて、前記被計測体を特徴付ける平面を形成し、前記撮像面に対する前記平面の姿勢パラメータを算出する姿勢演算ステップと、前記姿勢演算ステップ及び前記距離計測ステップによりそれぞれ算出した画像に対応する姿勢パラメータと距離データとに基づいて、前記被計測直線上の交点間寸法を演算する寸法演算ステップと、を含むことを特徴とする。 The twelfth aspect of the present invention is based on a picked-up image of a measured object having a parallel straight line part and a straight line part orthogonal to the parallel straight line part in a state where the straight line part is designated by the measured part designation unit. An image measurement method for measuring a dimension of a measurement object by measuring a distance between an imaging unit and a measurement point by a distance measurement unit, and detecting and detecting a linear component on an image acquired by the imaging unit An image processing step for specifying an intersection coordinate between the specified straight line and the specified straight line portion, and a plane for characterizing the object to be measured based on the intersection coordinate specified by the image processing step. A posture calculation step for calculating a posture parameter of the plane with respect to the imaging surface, and posture parameters corresponding to images calculated by the posture calculation step and the distance measurement step, respectively. Based on the meter and the distance data, characterized in that it comprises a and a dimension calculating step of calculating an intersection between the dimensions on the object to be measured linearly.
本発明の請求項13は、平行直線部と該平行直線部と直交する直線部とを有する被計測体を被計測部指定手段により前記被計測直線部の一端を指定した状態で、異なる2つの視点から撮像した1対の撮像画像に基づいて前記被計測体の寸法を計測する画像計測方法であって、
距離計測手段により撮像手段と被計測点との距離を計測するステップと、撮像手段により取得した第1及び第2の画像上の直線成分を検出し、検出された直線と前記指定された被計測直線との交点座標を特定する交点座標特定する画像処理ステップと、前記画像処理ステップにより特定された交点座標に基づいて、前記被計測体を特徴付ける平面を形成し、前記撮像面に対する前記平面の姿勢パラメータを算出する姿勢演算ステップと、前記姿勢演算ステップ及び前記距離計測ステップによりそれぞれ算出した第1及び第2の画像に対応する姿勢パラメータと距離データとに基づいて、前記被計測直線上の交点間寸法を演算する寸法演算ステップと、前記寸法演算ステップにより演算された交点間寸法値に基づいて、前記第1及び第2の画像間の対応点を特定するマッチング処理ステップとを含むことを特徴とする。
According to a thirteenth aspect of the present invention, in a state in which an object to be measured having a parallel straight line portion and a straight line portion orthogonal to the parallel straight line portion is specified by one end of the measured straight line portion by the measured portion specifying means, An image measurement method for measuring a dimension of the measurement object based on a pair of captured images captured from a viewpoint,
A step of measuring the distance between the imaging means and the point to be measured by the distance measuring means; a linear component on the first and second images acquired by the imaging means; and the detected straight line and the designated measured object An image processing step for specifying an intersection coordinate with a straight line, and a plane for characterizing the object to be measured based on the intersection coordinate specified by the image processing step, and an attitude of the plane with respect to the imaging surface Based on the posture calculation step for calculating the parameters, and the posture parameters and distance data corresponding to the first and second images calculated by the posture calculation step and the distance measurement step, respectively, the intersection points on the measured straight line Based on the dimension calculation step for calculating the dimension and the dimension value between the intersections calculated in the dimension calculation step, the first and second images Characterized in that it comprises a matching processing step of identifying the corresponding points.
本発明の請求項14は、1対の平行直線部と該平行直線部と直交する直線部とを有する被計測体の計測部を撮像レンズの光軸で指示した状態で撮像された画像に基づいて、被計測体の平面の姿勢を計測する画像計測方法であって、前記撮像手段により取得された撮像画像に基づいて、撮像面の中心を原点として被計測体を特徴付ける交点座標を算出する画像処理ステップと前記画像処理ステップにより得られた交点座標に基づいて、被計測体を特徴付ける平面を形成し、前記撮像面に対する前記平面の姿勢パラメータを演算する姿勢演算ステップとを含むことを特徴とする。 The fourteenth aspect of the present invention is based on an image captured in a state in which the measurement unit of the measurement target having a pair of parallel straight line portions and a straight line portion orthogonal to the parallel straight line portions is indicated by the optical axis of the imaging lens. An image measurement method for measuring the orientation of the plane of the measured object, wherein the image calculates intersection coordinates that characterize the measured object with the center of the imaging surface as the origin, based on the captured image acquired by the imaging means. And a posture calculation step of forming a plane characterizing the measurement object based on the intersection coordinates obtained by the processing step and the image processing step, and calculating a posture parameter of the plane with respect to the imaging surface. .
本発明の請求項1、12によれば、単眼カメラの1回の距離撮像動作で被計測対の交点寸法の取得を可能にしたので被計測体の寸法計測に基準体が不要となった。また、計測した寸法は、撮像した画像上に表示されるので、その場で再生表示する簡単に寸法を計測することが可能となる。
According to
本発明の請求項2、13によれば、異なった2つの視点(撮像位置)のそれぞれにおいて、ファインダー上の基準線により被計測部の端部を指定して2枚の撮像画像を得るようにしたので、従来できなかった単眼カメラによる寸法計測が可能となった。さらに、従来の物品形状計測ではモニター表示させて計測場所を指示することしかできなかったが、撮像位置の制約はなく、任意な場所から計測したい2点を指示、撮影するだけで寸法計測できるので、“その場で”、手軽な寸法計測が実現可能となる。 According to the second and thirteenth aspects of the present invention, at each of two different viewpoints (imaging positions), the end of the part to be measured is designated by the reference line on the finder, and two captured images are obtained. Therefore, it was possible to measure dimensions with a monocular camera that was not possible before. Furthermore, in conventional article shape measurement, it was only possible to indicate the measurement location by displaying it on the monitor, but there is no restriction on the imaging position, and it is possible to measure the dimensions by simply pointing and photographing two points to be measured from arbitrary locations. , "On the spot", easy dimension measurement can be realized.
さらに、マッチング処理として、2つの異なる撮像画像間の対応点として被計測直線上の交点間寸法を用いたので、精度の高く簡単なマッチング処理でよいため処理時間の迅速化が図れる。 Furthermore, since the dimension between the intersections on the measured straight line is used as the corresponding point between two different captured images as the matching process, the processing time can be speeded up because a simple and highly accurate matching process is sufficient.
本発明の請求項3、14によれば、撮像手段のパラメータと撮像画像データのみで撮像面に対する被計測体の姿勢を簡単に検出できるため、姿勢検出センサや大きな演算処理能力が不要となる。被計測体形状も完全な矩形でなくとも矩形を特徴付ける2個の座標のみで被計測体の姿勢を算出できるので、広範な利用が期待できる。 According to the third and fourteenth aspects of the present invention, since the posture of the measurement object with respect to the imaging surface can be easily detected using only the parameters of the imaging means and the captured image data, the posture detection sensor and large calculation processing capability are not required. Even if the shape of the measured object is not a perfect rectangle, the posture of the measured object can be calculated using only two coordinates that characterize the rectangle.
本発明の請求項1、2及び3によれば、画像計測処理プログラムが組み込まれた画像処理手段と計測演算手段とが一体化された構成としたので、簡単な演算処理で低価格な装置を提供できる。 According to the first, second and third aspects of the present invention, since the image processing means in which the image measurement processing program is incorporated and the measurement calculation means are integrated, a low-cost apparatus can be obtained by simple calculation processing. Can be provided.
以下、図面を用いて本発明を実施するための最良の形態について説明する。
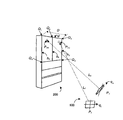
図1は、本実施に係わる画像計測装置を用いて物品形状を測定するシステム構成斜視図である。100は画像計測装置本体であり、200は計測対象となる被計測体である。また、寸法計測する直線部Q1Q2(被計測直線dと呼ぶ)は、寸法Dである。またQ1Q2Q3Q4及びQkは同一平面上にあるとみなす。また、画像計測装置本体100に設けられた撮像手段1は、2つの異なる視点、撮像位置PsとPfからそれぞれ被計測体の被計測直線の端部近傍Ps0、Pf0(以後、指示点と呼ぶ)に向けて撮像する。Ls、Lfは、それぞれ撮像レンズの中心から撮像面と被計測体との上の計測点(以後、被計測点と呼ぶ)までの距離である。なお、図中の被計測点は、撮影レンズ光軸と被計測体との交点である指示点Ps0,Pf0と一致させてある。
The best mode for carrying out the present invention will be described below with reference to the drawings.
FIG. 1 is a perspective view of a system configuration for measuring an article shape using an image measuring apparatus according to the present embodiment.
図2は、本実施の形態に係わる画像計測装置の構成ブロック図である。画像計測装置本体100は、撮像手段1、画像処理手段10、計測演算手段11及びそれらを制御する制御部9から構成されている。撮像手段1は撮影レンズ光学系101、撮像素子(CCD)102、素子駆動部103、被計測指定部2とから構成されている。撮像レンズ101の光軸は、撮像素子の中心、すなわち画像座標系(X−Y座標系)の原点Omになるよう設定されている。
FIG. 2 is a block diagram showing the configuration of the image measuring apparatus according to this embodiment. The image measuring apparatus
被計測部指定手段2は、指示点を指定すると共に被計測体直線部の端部を指定するものであり、具体的には、十字状基準線がファインダー上に設けられている。十字状基準線の中心は、撮像画像座標系(X−Y座標系)の原点になるように構成され、計測する際、この基準線の中心により被計測体上に指示点が指定される。また、この十字状基準線の横線は撮像画像座標のX軸、縦線は撮像画像座標のY軸にそれぞれ対応するように設けられており、この横線、縦線により被計測直線の端部が指定される。なお、本実施の形態の被計測部指定手段は、十字基準線の全てを用いて被計測端部を特定したが、本実施の形態の被計測部指定手段である十字状のX、Y基準線のいずれか一方のみを用いて、1対の辺または被計測直線と交差した点からの最隣接の交点が被計測直線の端部を特定する方法、単に指示点の最隣接の交点が被計測直線の端部であると特定する方法であっても良い。
The part to be measured designating
また、被計測部指定手段2には、操作者が被計測体のどこを指示しているかがわかるように可視化レーザーを補助手段として備えても良い。CCD撮像素子102は撮像素子駆動回路103により制御され、の動CCD素子から読み出された撮像画像信号は、A/D変換され、画像メモリ3に一旦記憶される。距離計測手段4は、撮像手段から被計測体上の計測点までの距離を計測する機能である。具体的には、レーザー測距計やデジタルカメラのオートフォーカスによる距離計測である。距離計測手段4により計測された距離データは、撮像データに対応付けて距離データメモリ5に記憶される。なお、図1では、撮像面もしくは撮像レンズ中心から被計測点までの距離を計測できるように、すなわち、撮像レンズの光軸と一致させて計測するように距離計測手段を配置してある。しかしながら、レンズ光軸に一致させて距離計測できない場合には、距離計測手段と撮像レンズや撮像面などの寸法配置や距離計測方向を予め決めておく必要がある。
Further, the measurement
主メモリ6は、撮像画像、撮像画像と対応付けられた距離計測データ、姿勢パラメータなど各種計算結果などを記憶する。また、これらの計測データはPCカードやスティックメモリなどのリムーバブルメモリ7に記憶することもできる。なお、リムーバルメモリに記億された計測処理プログラムは、読み出して主メモリに記憶させておく場合もある。
The main memory 6 stores various calculation results such as a captured image, distance measurement data associated with the captured image, and posture parameters. These measurement data can also be stored in a
制御部(CPU)9は、画像計測装置全体を制御し、ROM(Read Only Memory)、RAM(Read Access Memory)を備えている。ROMには制御部の動作制御プログラム、画像処理プログラム及び計測処理プログラムなどが記憶されている。RAMでは各種プログラムを一時的に記憶する。 The control unit (CPU) 9 controls the entire image measuring apparatus and includes a ROM (Read Only Memory) and a RAM (Read Access Memory). The ROM stores an operation control program for the control unit, an image processing program, a measurement processing program, and the like. The RAM temporarily stores various programs.
画像処理手段10は、撮像手段により取得された撮像画像をA/D変換してデジタル化し、濃淡画像を得る2値化処理部1010、さらに濃淡画像を微分処理し、濃度変化が大きいところをエッジ部とするエッジ処理部1020、エッジ部を用いてハフ変換処理して直線成分を検出する直線検出部1030、これら直線間によって形成される交点を検出し、交点座標を算出する交点座標特定手段1040とから構成される。この交点座標特定手段では、被計測部指定手段により指定された被計測直線の端部の一方を特定すると共に、2回の指定動作によって得られた撮像画像に基づいて、被計測直線の横寸法計測か縦寸法計測かを決める動作も行う。
計測演算手段11は、姿勢演算手段110と寸法演算手段120とマッチング処理手段130とから構成される。
The image processing means 10 performs A / D conversion on the captured image acquired by the imaging means and digitizes it, and a
The measurement calculation unit 11 includes an
姿勢演算手段110は、被計測体形状を特徴付けるQ1、Q2の対応点q1、q2で形成される被計測平面上の指示点において、撮像面に対する被計測体平面の姿勢パラメータβ、ψ、γを算出する。 The posture calculation means 110 calculates posture parameters β, ψ, and γ of the measured object plane with respect to the imaging surface at designated points on the measured plane formed by corresponding points q1 and q2 of Q1 and Q2 that characterize the measured object shape. calculate.
寸法演算手段120は、姿勢演算手段により算出された姿勢パラメータγ、ψと被計測体形状を特徴付ける交点座標と撮像時に取得された距離データとに基づいて、実空間内の被計測直線上の交点間寸法を算出する。この手段において、取得された1枚の撮像画像の交点座標に基づいて、実空間内の交点間寸法は算出できるが、特殊な形状をもつ被計測体の計測の場合に限られる。本実施の形態では、操作者が指定した2点(始点及び終点)間の寸法を計測できるように拡張している。そのため1枚の撮像画像だけでは被計測直線両端部の一方のみしか指定されておらず、もう一方の端部はどの交点かは確定できず、計測終点とするもう1枚の撮像画像が必要となるのである。従って、この寸法演算手段では異なる視点から撮像された始点及び終点の撮像画像をそれぞれの距離データに基づいて、実空間内の被計測直線上の交点間寸法をそれぞれ算出する。 The dimension calculation means 120 is based on the posture parameters γ and ψ calculated by the posture calculation means, the intersection coordinates characterizing the shape of the measured object, and the distance data acquired at the time of imaging, and the intersection on the measured straight line in the real space. Calculate the inter dimension. In this means, the dimension between the intersection points in the real space can be calculated based on the intersection coordinates of the acquired single captured image, but this is limited to the measurement of the measurement object having a special shape. In the present embodiment, expansion is performed so that the dimension between two points (start point and end point) designated by the operator can be measured. For this reason, only one of the both ends of the straight line to be measured is specified in one captured image, and the intersection of the other end cannot be determined, and another captured image as the measurement end point is required. It becomes. Therefore, this dimension calculation means calculates the dimension between the intersection points on the measured straight line in the real space based on the distance data of the captured images of the start point and the end point captured from different viewpoints.
前述した特殊な形状もつ被計測体計測とは、例えば、被計測体として単純な直方体の1辺の長さを計測する場合である。この計測する一辺が撮像された画像を濃淡画像処理することにより、被計測直線部を特徴付ける交点は2点のみしか存在しないので、簡単に実空間内の実寸法の計測が可能となる。 The above-mentioned measurement object having a special shape is, for example, a case where the length of one side of a simple rectangular parallelepiped is measured as the measurement object. By performing gray-scale image processing on an image in which one side to be measured is picked up, there are only two intersections that characterize the straight line portion to be measured, so that the actual dimensions in the real space can be easily measured.
マッチング処理手段120は、異なる視点から撮像した2枚の撮像画像について、寸法演算手段により算出された被計測直線上の交点間実寸法から交点列データを作成する。この交点列データ間の対応点を探索処理し、寸法計測のための始点、終点を確定する処理である。具体的には、始点撮像画像では、被計測直線の寸法計測の始点である一端は指定されるが、終点である他端はどの交点かは不明である。また、終点撮像画像では、被計測直線の終点である一端は指定されるが、始点であった他端は被計測直線上のどの交点か不明である。それぞれの撮像画像の被計測直線上の始点及び終点が、それぞれどの交点に対応するかを確定することにより被計測直線間の寸法が算出できるのである。
The matching
表示手段12は、計測された寸法データを表示するものである。なお、デジタルカメラのモニターであれば、再生された画像上に計測した直線をカラーにより重畳表示させるようにしても良い。 The display means 12 displays the measured dimension data. In the case of a monitor of a digital camera, the measured straight line may be superimposed and displayed in color on the reproduced image.
次に、本発明の最良の実施形態に係わる画像計測装置の基本計測原理について簡単に説明する。
図3は実空間(Xe−Ye−Ze座標系)内に置かれた被計測体と撮像画像座標系(X−Y座標系)上の被計測体像との射影変換を説明する図である。図では、実空間のYe-Ze座標系で示し、撮像画像上のY−Z座標系と一致させてある。Xe軸は紙面に垂直方向にある。Ze軸は撮像レンズの光軸とし、撮像面の中心(撮像画像座標系の原点Om)を通る。また、撮影レンズの光軸との交点を透視点Oとする。
Next, the basic measurement principle of the image measuring apparatus according to the best embodiment of the present invention will be briefly described.
FIG. 3 is a diagram for explaining projective transformation between a measurement object placed in real space (Xe-Ye-Ze coordinate system) and a measurement object image on a captured image coordinate system (XY coordinate system). . In the figure, the real space is represented by the Ye-Ze coordinate system, and is matched with the YZ coordinate system on the captured image. The Xe axis is perpendicular to the page. The Ze axis is the optical axis of the imaging lens and passes through the center of the imaging surface (the origin Om of the captured image coordinate system). The intersection point with the optical axis of the photographic lens is a perspective point O.
計測対象物体(以下、被計測体と呼ぶ)は長さD(=Q1Q2)を有し、撮像レンズの中点から距離L、撮像面102に対して角度γ傾いた位置に置かれている。なお、この傾き角度γは姿勢パラメータの1つである。実際には撮像面の前面位置には撮像レンズ光学系101が置かれ、撮像面には2次元平面の倒立像が結像する構成となっているが、ここでは説明し易くするために便宜上、CCD撮像面の後方焦点の位置に配置する構成としてある。以後、この位置を等価位置、この等価位置にある等価撮像面を単に撮像面と呼ぶ。
An object to be measured (hereinafter referred to as an object to be measured) has a length D (= Q1Q2) and is placed at a distance L from the middle point of the imaging lens and at a position inclined by an angle γ with respect to the
焦点距離fの位置におかれた等価被計測体Q*1Q*2の物点Q*1、Q*2は、透視点OとしてのY軸面上の撮像面上に像点q1(y1,f), q2(y2,f)として投影される。像点q1, q2は、それぞれ被計測体のQ1、Q2に対応している。すなわち、幾何学的な対応付けを行うことにより被計測体の物点と撮像面上の像点との関係を求めることができる。すなわち幾何学的対応付けによる透視射影変換方法である。
等価位置におけるQ*1,Q*2における座標は、次式で表される。
The object points Q * 1 and Q * 2 of the equivalent measured object Q * 1Q * 2 placed at the focal distance f are image points q1 (y1, y1, y2) on the imaging surface on the Y-axis plane as the perspective O f), projected as q2 (y2, f). The image points q1 and q2 correspond to Q1 and Q2 of the measured object, respectively. In other words, the relationship between the object point of the measurement object and the image point on the imaging surface can be obtained by performing geometrical association. That is, a perspective projection conversion method based on geometrical association.
The coordinates of Q * 1 and Q * 2 at the equivalent position are expressed by the following equations.

ここで撮像面上の像q1,q2と被計測体の実寸法Q1、Q2との関係について説明する。
まず、等価位置における被計測体の寸法Q*1Q*2は、数1式を用いて、次式で算出される。
Here, the relationship between the images q1 and q2 on the imaging surface and the actual dimensions Q1 and Q2 of the measurement object will be described.
First, the dimension Q * 1Q * 2 of the measurement object at the equivalent position is calculated by the following
従って、被計測体である被計測直線の実寸法Dは、撮像レンズの光軸と被計測体とが交わる指示点Psを原点としているので、相似関係からL/fを乗することによって算出でき、次式で表される。 Accordingly, the actual dimension D of the measured straight line, which is the object to be measured, can be calculated by multiplying L / f from the similarity because the origin is the indicated point Ps where the optical axis of the imaging lens and the object to be measured intersect. Is expressed by the following equation.
以上のことから姿勢パラメータγとレンズ中心(又は撮像面)から被計測点までの距離Lを検出できれば、容易に実寸法を算出することができる。
次に、図4に基づいて、本実施の形態に係わる画像計測装置の基本動作について説明する。
From the above, if the posture parameter γ and the distance L from the lens center (or imaging surface) to the measurement point can be detected, the actual dimensions can be easily calculated.
Next, the basic operation of the image measurement apparatus according to the present embodiment will be described with reference to FIG.
ステップS1は、被計測点と被計測直線両端部を指定する照準操作である。被計測体平面上の一対の平行辺h1、h2と直交する被計測直線dの寸法Dを計測するためには、直線の両端(始点と終点)を指定しなければならない。カメラファインダーに表示される十字基準線の中心点が、撮像画像座標系(X−Y座標系)の原点、すなわち撮像レンズの光軸と一致する構成としてある。この十字基準線が、前述した被計測部指定手段である。被計測直線の一端部を指示する照準操作は、この十字基準線の中心点を被計測直線の一端部の近傍に指示する操作であり、この操作により被計測体平面上の指示点Ps0、Pf0が特定される。また、十字線の横線は撮像画像座標系のX軸、十字基準線の縦線はY軸に一致させてあるので、この十字線の横基準線により一対の辺h1、h2が指定され、縦線基準線により被計測直線dが指定される。図6の撮像画像の如く、被計測部指定手段により被計測直線の端部が指定されていることがわかる。なお、図6については後述詳細に説明する。 Step S1 is a sighting operation for designating the measured point and both ends of the measured straight line. In order to measure the dimension D of the measured straight line d orthogonal to the pair of parallel sides h1 and h2 on the measured object plane, both ends (start point and end point) of the straight line must be designated. The center point of the cross reference line displayed on the camera finder is configured to coincide with the origin of the captured image coordinate system (XY coordinate system), that is, the optical axis of the imaging lens. This cross reference line is the above-described measurement target designating means. The aiming operation for designating one end portion of the measured straight line is an operation for designating the center point of the cross reference line to the vicinity of one end portion of the measured straight line, and by this operation, designated points Ps0 and Pf0 on the measured object plane. Is identified. In addition, since the horizontal line of the crosshairs coincides with the X axis of the captured image coordinate system and the vertical line of the crosshair reference line coincides with the Y axis, a pair of sides h1 and h2 are designated by the horizontal reference line of the crosshairs. The measured straight line d is designated by the line reference line. As shown in the captured image in FIG. 6, it can be seen that the end of the measured straight line is designated by the measured part designating means. 6 will be described in detail later.
ステップS2で距離計測手段により距離計測され、距離データメモリに保存される。このステップとほぼ同時にステップ3で撮像画像が取得され、画像メモリに一時的に記録される。なお、ステップ2のカメラ付属のオートフォーカス機能を用いる場合、オートフォーカスにより被計測点までの焦点合わせを行うことにより、撮像面から被計測点までの距離計測データを取得する方法であるのでステップS2はステップS3に含まれる動作となる。
In step S2, the distance is measured by the distance measuring means and stored in the distance data memory. Almost simultaneously with this step, the captured image is acquired in
ステップS4は、取得した撮像画像に基づいて交点座標を特定する一連の画像処理を行う。
次に、図5に基づいて、画像処理手段の動作について説明する。
ステップS10は取得された撮像画像を2値化処理し、濃淡画像を得る。ステップS11では濃淡画像を微分処理してエッジ部を検出するエッジ処理を行い、ステップS12では得られたエッジ部からハフ変換により直線を検出する。ステップS13では、被計測体以外で検出された直線成分や不要な画像をノイズとして除去処理を行う。ステップS14では、検出された直線間の交点の中で、被計測部指定手段により指定された直線d、直線hと交わる全ての点(被計測直線の端点を含む)の座標を算出し、特定する。
Step S4 performs a series of image processing for specifying the intersection coordinates based on the acquired captured image.
Next, the operation of the image processing means will be described based on FIG.
In step S10, the acquired captured image is binarized to obtain a grayscale image. In step S11, edge processing is performed to detect the edge portion by differentiating the grayscale image, and in step S12, a straight line is detected from the obtained edge portion by Hough transform. In step S13, removal processing is performed using noise as a linear component or an unnecessary image detected by a device other than the measurement target. In step S14, the coordinates of all the points (including the end points of the line to be measured) that intersect with the line d and the line h specified by the measurement target specifying unit are calculated and specified. To do.
次のステップS15では、被計測直線両端のそれぞれの端部、すなわち計測始点及び計測終点を特定する。
図6は、異なる撮像位置Ps、Pfから被計測直線dの両端部を含めて撮像された(a)始点撮像画像、(b)終点撮像画像である。これらの配置関係は後述する図10に示した。
In the next step S15, the respective ends of the measured straight line, that is, the measurement start point and the measurement end point are specified.
FIGS. 6A and 6B are (a) a start-point captured image and (b) an end-point captured image captured from different imaging positions Ps and Pf including both ends of the measured straight line d. These arrangement relationships are shown in FIG.
また、図6(a)は被計測部指定手段であるX、Y基準線により、被計測直線の一方の端部Q1を特定する始点撮像動作により取得した撮像画像(始点撮像画像と呼ぶ)である。
計測始点を特定するために撮像画像座標系(X−Y座標系)の原点Omである撮像面の中心を被計測直線の一端である端部Q1の近傍Ps0を指示する。このとき、基準線となる撮像画像座標系のX軸は被計測直線(d)と、Y軸は計測端部稜線(h1)とそれぞれ交差する。すなわち、被計測直線の一端である端部Q1は、操作者が撮像画像座標系の第2象限におくように指示されることにより、始点となる端部Q1に対応する端点q1sを特定することができる。この始点撮像画像には計測終点は撮像されているが特定はされていない。次に、始点撮像動作と同様に計測終点を特定する終点撮像動作が行われ、図6(b)終点撮像画像を取得する。すなわち、被計測部指定手段により、撮像面中心を被計測直線の他端である端部Q2の近傍点Pf0に指示する。その時、端部Q2は、操作者が撮像画像座標系の第1象限におくように指示されることにより、終点となる端部Q2に対応する端点q2sを特定することができる。
FIG. 6A shows a captured image (referred to as a “started-point captured image”) acquired by a start-point imaging operation that identifies one end Q1 of the measured straight line using the X and Y reference lines that are the measured-part specifying means. is there.
In order to specify the measurement start point, the vicinity Ps0 of the end Q1 that is one end of the line to be measured is designated at the center of the imaging surface that is the origin Om of the captured image coordinate system (XY coordinate system). At this time, the X axis of the captured image coordinate system serving as the reference line intersects the measured straight line (d) and the Y axis intersects the measurement end ridge line (h1). That is, the end Q1 that is one end of the line to be measured specifies the end point q1s corresponding to the end Q1 that is the start point when the operator is instructed to be in the second quadrant of the captured image coordinate system. Can do. In this start-point captured image, the measurement end point is captured but not specified. Next, an end point imaging operation for specifying a measurement end point is performed in the same manner as the start point imaging operation, and an end point captured image in FIG. 6B is acquired. That is, the measured portion specifying means instructs the center of the imaging surface to the vicinity point Pf0 of the end portion Q2, which is the other end of the measured line. At that time, the end portion Q2 can specify the end point q2s corresponding to the end portion Q2 which is the end point when the operator is instructed to be in the first quadrant of the captured image coordinate system.
なお、本実施の形態では被計測部指定手段としてX、Y基準線を用いて、被計測直線部の始点となる一端を第2象限、終点となる他端を第1象限となるよう特定したが、被計測部指定手段としてX、Y基準線のいずれか一方のみを用いて端点を特定する方法であっても良い。 In this embodiment, the X and Y reference lines are used as the measurement target specifying means, and one end that is the starting point of the measured linear part is specified as the second quadrant and the other end that is the end point is specified as the first quadrant. However, a method of specifying an end point using only one of the X and Y reference lines as the measurement target specifying unit may be used.
また、このステップS15において、被計測部指定手段により指定された始点および終点の撮像画像で特定された端点の位置関係を比較判断して、横寸法計測か、縦寸法計測かを決める動作も行う。図6では、1回目の指定動作で得られた始点撮像画像において、被計測直線の一方の端部を第2象限、2回目の指定動作で得られた終点撮像画像において、被計測直線の他方の端部を第1象限にあるので横寸法を計測するということが判断される。もしこの2回目の指定動作で被計測直線の端を第3象限に指定すれば、縦寸法を計測するということが判断される。 In step S15, the positional relationship between the end points specified by the picked-up images of the start point and the end point specified by the measurement target specifying unit is compared and determined, and an operation for determining whether the measurement is horizontal dimension or vertical dimension is also performed. . In FIG. 6, in the start-point captured image obtained by the first designation operation, one end of the measured straight line is in the second quadrant, and in the end-point captured image obtained by the second designation operation, the other of the measured straight line It is determined that the lateral dimension is to be measured because the end of is in the first quadrant. If the end of the straight line to be measured is designated in the third quadrant in the second designation operation, it is determined that the vertical dimension is to be measured.
ステップS17では、被計測部指定手段により特定された範囲にある端点の個数を判別し、被計測直線の端部とは関係ない交点は全て除去する。例えば始点として画像座標の第2象限の範囲にて特定された端点はq1であるので、端点q1と関係ない交点は全て除去される。 In step S17, the number of end points in the range specified by the measured portion specifying means is determined, and all the intersections not related to the end portions of the measured straight line are removed. For example, since the end point specified as the start point in the second quadrant of the image coordinates is q1, all the intersections not related to the end point q1 are removed.
なお、被計測部指定手段により特定する範囲の決める方法として、画像座標系の原点に近い交点を指定しても良い。例えば、最隣接にある交点のみを指定する方法または第2隣接の交点までを指定する方法などがある。 Note that, as a method of determining the range to be specified by the measurement target specifying unit, an intersection point close to the origin of the image coordinate system may be specified. For example, there are a method of designating only the intersection point closest to the nearest neighbor or a method of designating up to the second neighboring intersection point.
また、個数判別は、被計測直線の端部が2重構造を有する物品形状では、エッジ処理された撮像画像上の指定された象限内の端点が2個存在する場合があるので、それに対応するために行う処理である。例えば、指示点Ps、Pfから最隣接交点を端点とする以外にも、第2隣接交点がある場合、濃淡画像上で最隣接交点と比較判断して関係あれば端点候補する。 Also, the number discrimination corresponds to the case where there are two end points in the specified quadrant on the edge-processed captured image in the shape of the article in which the end of the straight line to be measured has a double structure. This is a process performed for this purpose. For example, if there is a second adjacent intersection from the designated points Ps and Pf as the end point, if there is a second adjacent intersection, it is compared with the most adjacent intersection on the gray image, and if there is a relationship, an end point candidate is obtained.
なお、本実施の形態の画像処理において、図1のように、被計測直線が物品の1辺の稜線それ自体である物品形状である場合、被計測直線の両端を含んで撮像された1枚のステップS10撮像画像を二値化処理した濃淡画像に基づいて、両端部(始点、終点)を判別して交点座標を決めることもできる。 In the image processing of the present embodiment, as shown in FIG. 1, when the measured straight line has an article shape that is the ridge line of one side of the article itself, one image is captured including both ends of the measured straight line. In step S10, based on the grayscale image obtained by binarizing the captured image, both end portions (start point, end point) can be determined to determine the intersection coordinates.
次に図4に戻り、ステップS5は、各視点Ps、Pfで撮像された始点撮像画像、終点撮像画像のそれぞれについて、算出された交点座標に基づいて姿勢演算処理を行い、それぞれの姿勢パラメータを算出する。 Next, returning to FIG. 4, in step S5, posture calculation processing is performed for each of the start-point captured image and the end-point captured image captured at each viewpoint Ps, Pf based on the calculated intersection coordinates, and each posture parameter is set. calculate.
ここで、本実施の形態における被計測体である3次元実空間内の平行な1対の辺を有する平面体についての姿勢パラメータ算出方法について説明する。
撮像面に対する被計測平面体の姿勢は、Z軸回りの角度β、Y軸回りの角度ψ、X軸回りの角度γ、の3つのパラメータにより決めることができる。これらの座標系はいずれも時計回りを正方向としている。
Here, a description will be given of a posture parameter calculation method for a planar body having a pair of parallel sides in the three-dimensional real space, which is a measurement object in the present embodiment.
The posture of the plane to be measured with respect to the imaging surface can be determined by three parameters: an angle β around the Z axis, an angle ψ around the Y axis, and an angle γ around the X axis. Each of these coordinate systems has a clockwise direction as a positive direction.
図7は姿勢演算手段の動作フロー図である。
計測直線部指定手段により指定された交点座標を取得する。例えば、始点撮像画像の場合では、被計測体を特徴づける直線d及びh1上に存在する交点座標である。
FIG. 7 is an operation flow diagram of the posture calculation means.
The intersection coordinates designated by the measurement straight line designation means are acquired. For example, in the case of the start-point captured image, the intersection coordinates exist on the straight lines d and h1 that characterize the measurement object.
姿勢パラメータ算出に用いる交点座標4個必要であるが、その1個は、図6の撮像画像の被計測部基準線により指定された直線dとh1と交わる点q1である。2個は本実施の形態のように横寸法計測の場合にはX軸と交わる点q01、q02である。残りの1個は、指定された交点の最隣接交点q1のqk、または、辺h1と1対の平行辺をなすh2と被計測直線端部に対応する交点q2である。これらは被計測直線の両端部であり、交点Qkに対応すると点qkは、実空間においてdとhkとが直交している、すなわちhkがh1と平行であるので姿勢パラメータ算出する指定された交点q1の最隣接交点として用いることができる。 Four intersection coordinates used for calculating the posture parameter are required, one of which is a point q1 that intersects the straight lines d and h1 designated by the measurement target reference line of the captured image of FIG. Two points q01 and q02 intersect with the X axis in the case of horizontal dimension measurement as in the present embodiment. The remaining one is qk of the nearest intersection q1 of the designated intersection, or h2 forming a pair of parallel sides with the side h1 and the intersection q2 corresponding to the measured straight line end. These are both ends of the straight line to be measured, and corresponding to the intersection point Qk, the point qk is the designated intersection point for calculating the posture parameter because d and hk are orthogonal in real space, that is, hk is parallel to h1. It can be used as the nearest intersection of q1.
また、交点q2は、被計測直線の端点Q1(q1)のもう一方の端点Q2に対応する端点q2である。本実施の形態では、画像処理時において濃淡エッジ処理により被計測直線の両端部検出は図5のステップS10及びS11で行われるので、交点q2は被計測直線の端部として確定することができる。また、これら被計測体を特徴づける交点により形成される平面(被計測平面)が特定される。 Further, the intersection point q2 is an end point q2 corresponding to the other end point Q2 of the end point Q1 (q1) of the measured straight line. In the present embodiment, both end portions of the measured straight line are detected in steps S10 and S11 in FIG. 5 by gray-scale edge processing at the time of image processing, so that the intersection q2 can be determined as the end of the measured straight line. Further, a plane (measuring plane) formed by the intersection characterizing these objects to be measured is specified.
ステップS31は、消失点算出するステップで、本実施の形態では横寸法計測であるのでY軸方向の消失点を算出する。なお、本実施の形態の被計測体は、X軸方向での消失点は存在しない。 Step S31 is a step of calculating the vanishing point. In this embodiment, since the horizontal dimension is measured, the vanishing point in the Y-axis direction is calculated. Note that the measured object of the present embodiment has no vanishing point in the X-axis direction.
図8は姿勢パラメータ算出に用いる撮像画像である。ここでは説明し易いように、交点q1,q2を用いた。なお、始点及び終点撮像画像ともに同じ処理を行うので、図中には始点、終点を表す添え字は割愛してある。 FIG. 8 is a captured image used for posture parameter calculation. Here, for easy explanation, the intersection points q1 and q2 are used. Since the same processing is performed for both the start point and end point captured images, subscripts representing the start point and end point are omitted in the figure.
このステップでは、1対の平行辺h1とh2とで形成される消失点を算出する。辺h1とh2とを延長して消失点VPtの座標を算出し、撮像画像座標の原点とこの消失点とを結んだ直線(消失直線と呼ぶ)がY軸とのなす角度β度とする。 In this step, the vanishing point formed by the pair of parallel sides h1 and h2 is calculated. The coordinates of the vanishing point VPt are calculated by extending the sides h1 and h2, and the angle between the origin of the captured image coordinates and the vanishing point (referred to as the vanishing line) and the Y axis is β degrees.
ステップS32では、Z軸回りの回転姿勢パラメータ角度βを消失点から算出する。
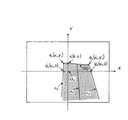
図9は、X−Y座標系をX‘−Y’座標系に回転座標変換した後の撮像画像である。この消失直線をY軸に一致するまで撮像画像座標の原点を中心に元撮像画像座標系を回転する。この角度がZ軸回りの回転姿勢パラメータ角度βである。この回転操作により実空間内の被計測体面の辺h1、h2は、Y‘軸と平行、被計測直線dはX’軸に平行になるように配置されたことになる。図では、q1(x1,y1)はq'(x'1,y'1)、q2(x2,y2)はq'(x'2,y'2)、に変換される。また回転変換後のX軸との交点をq'5(0,Y'5)、q‘6(X'、0)とする。さらに、辺dとY軸との交点をq't(0,y’t)とする。なお、回転座標変換前に撮像画像座標系のX軸との交点q01,q02は、変換後は使用せず、変換後の撮像画像座標系のX‘軸との交点q'5(0,Y'5)、q‘6(X'、0)を用いている。
ステップS33は、被計測体平面のX軸及びY軸回りの回転姿勢パラメータ角度ψ、γを算出するステップである。
In step S32, the rotation attitude parameter angle β around the Z axis is calculated from the vanishing point.
FIG. 9 is a captured image after the rotational coordinate conversion from the XY coordinate system to the X′-Y ′ coordinate system. The original captured image coordinate system is rotated around the origin of the captured image coordinates until the disappearance straight line coincides with the Y axis. This angle is the rotation attitude parameter angle β around the Z axis. By this rotation operation, the sides h1 and h2 of the surface to be measured in the real space are arranged in parallel with the Y ′ axis, and the measurement straight line d is arranged in parallel with the X ′ axis. In the figure, q1 (x1, y1) is converted into q ′ (x′1, y′1), and q2 (x2, y2) is converted into q ′ (x′2, y′2). Further, the intersections with the X axis after the rotation conversion are defined as q′5 (0, Y′5) and q′6 (X ′, 0). Furthermore, the intersection of the side d and the Y axis is defined as q′t (0, y′t). Note that the intersection points q01 and q02 with the X axis of the captured image coordinate system before the rotation coordinate conversion are not used after the conversion, and the intersection points q′5 (0, Y with the X ′ axis of the captured image coordinate system after the conversion are not used. '5) and q'6 (X', 0) are used.
Step S33 is a step of calculating rotational attitude parameter angles ψ and γ around the X axis and Y axis of the measurement object plane.
図10は、異なる撮像位置Ps、Pfを透視点として、実空間内における被計測直線上の物点(Q)を始点及び終点撮像面に透視射影した時の像点(q)との対応関係を示す図である。Xe−Ze座標系の2次元配置図で示した。 FIG. 10 shows the correspondence between the image points (q) when the object points (Q) on the measured straight line in the real space are perspectively projected onto the start point and end point image planes with different image pickup positions Ps and Pf as perspective points. FIG. A two-dimensional layout of the Xe-Ze coordinate system is shown.
実空間の被計測体のQ1Q2は、撮像面上のqs1qs2にそれぞれ対応する。撮像画像座標系(X−Y座標系)の原点は被計測体平面上の指示点Psoに対応する。また、Qkは撮像画像処理して、エッジ点(交点)として検出された点であり、撮像面上のqkに対応する。 Q1Q2 of the measured object in the real space corresponds to qs1qs2 on the imaging surface. The origin of the captured image coordinate system (XY coordinate system) corresponds to the designated point Pso on the measured object plane. Qk is a point detected as an edge point (intersection point) by processing the captured image, and corresponds to qk on the imaging surface.
図11は、撮像面に対する被計測体面の姿勢パラメータ算出するための3次元透視射影変換を説明する図である。
図11(a)(b)に示した実空間内に置かれた被計測体平面及び撮像面を等価位置に置き、をそれぞれY−Z座標投影平面(X=0)、X−Z座標投影平面(Y=0)に正投影した図である。図中の実空間の座標系はX−Y−Z座標系のX軸,Y軸は、画像座標系のX‘軸、Y’軸に一致させ、Z軸は光軸と一致させてある。また、座標系X−Z座標系の原点Omと透視点Oの距離は、撮像レンズの焦点距離fの等価位置である。さらに、被計測体の斜線部分は、撮像された部分を示している。
FIG. 11 is a diagram for explaining the three-dimensional perspective projection conversion for calculating the posture parameter of the measurement target surface with respect to the imaging surface.
The measured object plane and the imaging plane placed in the real space shown in FIGS. 11A and 11B are placed at equivalent positions, respectively, and the YZ coordinate projection plane (X = 0) and the XZ coordinate projection, respectively. It is the figure which carried out the orthographic projection to the plane (Y = 0). In the drawing, the real space coordinate system is the X-axis of the XYZ coordinate system, the Y-axis is matched with the X′-axis and Y′-axis of the image coordinate system, and the Z-axis is matched with the optical axis. The distance between the origin Om and the perspective O in the coordinate system XZ coordinate system is an equivalent position of the focal length f of the imaging lens. Furthermore, the hatched portion of the measurement object indicates the imaged portion.
撮像画像座標系における各交点座標q‘1(x'1,y'1),q’2(x'2,y'2)また、撮像画像上でのX軸との交点座標Q5(x'5,0),Q6(x'6,0)と対応する、等価面上の実空間内のへ被計測平面の1対の辺h1h2ならびに被計測直線dとの交点座標Q*1(X*1,Y*1,Z*1)、Q*2(X*2,Y*2,Z*2)、Q*5(X*5,0,Z*5),Q*6(X*6,0,Z*6)、Q*t(0,Y*t0,Z*t)の対応付けを行った。
それぞれ次式で表される。
Intersection coordinates q′1 (x′1, y′1), q′2 (x′2, y′2) in the captured image coordinate system Intersection coordinates Q5 (x ′) with the X axis on the captured image 5, 0), Q6 (x'6, 0) corresponding to the pair of sides h1h2 of the plane to be measured in the real space on the equivalent plane and the intersection coordinates Q * 1 (X *) with the line to be measured
Each is expressed by the following equation.
ここで、Y−Z投影面及びX−Z投影面の点Q*1、点Q*5に着目して、姿勢パラメータγに関するの関係式が算出できる。 Here, by paying attention to the points Q * 1 and Q * 5 of the YZ projection plane and the XZ projection plane, a relational expression related to the posture parameter γ can be calculated.
同様に、のY−Z投影面及びX−Z投影面の点のQ*6に着目して、次式が算出できる。 Similarly, the following equation can be calculated by paying attention to Q * 6 of points on the YZ projection plane and the XZ projection plane.
数式5と数式6からわかるように、X軸回りの姿勢パラメータγは、q1とq5またはq2とq6のそれぞれ2つ座標値と焦点距離の表現でγを算出できる。
次に、Q*2に着目して、X−Z投影面、Y−Z投影面におけるZ*2の座標は次式で表される。
As can be seen from Equations 5 and 6, the posture parameter γ around the X axis can be calculated by expressing two coordinate values q1 and q5 or q2 and q6 and a focal length.
Next, paying attention to Q * 2, the coordinates of Z * 2 on the XZ projection plane and the YZ projection plane are expressed by the following equations.
数式7は次の関係にある。
従って、姿勢パラメータψは、姿勢パラメータγを含んだ次式が導かれる。 Therefore, the following equation including the posture parameter γ is derived as the posture parameter ψ.
数式5または数式6によりγが算出されれば、ψは数式9より算出できる。
以上のことから、焦点距離が既知の撮像手段により2つの端部を含めた1対の平行辺を撮像できれば、撮像面の座標値のみから撮像面に対する被計測体平面の姿勢ψ及びγを算出でき、しかも簡単な関係式で表されることがわかる。
If γ is calculated by Equation 5 or Equation 6, ψ can be calculated by Equation 9.
From the above, if a pair of parallel sides including two ends can be imaged by an imaging means with a known focal length, the orientations ψ and γ of the measured object plane with respect to the imaging surface are calculated from only the coordinate values of the imaging surface. It can be seen that it is expressed by a simple relational expression.
次に、数式5、6、9を用いて、始点画像qs、終点画像qfのそれぞれについての姿勢パラメータ(γs,ψs)、(γf,ψf)を算出する。
ステップS34は、始点画像及び終点画像における姿勢パラメータを算出した結果をそれぞれの撮像画像に対応させて姿勢パラメータを記憶しておく。
Next, posture parameters (γs, ψs) and (γf, ψf) for the start point image qs and the end point image qf are calculated using Equations 5, 6, and 9, respectively.
In step S34, the posture parameters are stored by associating the result of calculating the posture parameters in the start point image and the end point image with each captured image.
本実施の形態の手順では横寸法計測に関して姿勢パラメータを算出したが、縦寸法計測であっても同様な方法で算出が可能であることはいうまでもない。
図4に戻り、ステップS6は、始点画像及び終点画像において、それぞれの被計測直線上の交点座標データを実空間座標に補正変換し、交点間寸法を算出するステップである。
In the procedure of the present embodiment, the orientation parameter is calculated for the horizontal dimension measurement, but it goes without saying that the vertical parameter measurement can be calculated by the same method.
Returning to FIG. 4, step S <b> 6 is a step of calculating the inter-intersection dimension by correcting and converting the intersection coordinate data on each measured straight line into real space coordinates in the start point image and the end point image.
図12は、寸法演算手段の動作フロー図である。
ステップS40では、被計測直線Q1Q2上に存在する交点のみの座標を取得する。
ステップS41は、図4のステップS5で算出された姿勢パラメータに基づいて、等価位置での交点間寸法を算出する。
FIG. 12 is an operation flowchart of the dimension calculation means.
In step S40, only the coordinates of the intersection existing on the measured straight line Q1Q2 are acquired.
In step S41, the dimension between the intersections at the equivalent position is calculated based on the posture parameter calculated in step S5 of FIG.
このステップでは、まだ被計測直線の両端部Q1とQ2は、まだ特定されていないので、実空間内の被計測直線Dは算出することはできないが、始点及び終点撮像画像で取得された交点座標、姿勢パラメータ及び距離データを用いて、被計測直線上の交点間の実寸法は算出することはできる。このステップでは、後述するステップ44のマッチング処理のために、始点及び終点撮像画像の被計測直線上の交点間寸法をそれぞれ算出する。 In this step, since both ends Q1 and Q2 of the measured straight line have not yet been specified, the measured straight line D in the real space cannot be calculated, but the intersection coordinates acquired from the start point and end point captured images Using the posture parameter and the distance data, the actual dimension between the intersections on the measured straight line can be calculated. In this step, the dimensions between the intersection points on the measurement target straight line of the start point and end point captured images are calculated for the matching process in step 44 described later.
ここで、実空間内の交点間の寸法演算方法について説明する。
実空間内における交点間の寸法算出方法は、端点間の実寸法と同じであるので、ここでは被計測直線の端点Q1Q2の実寸法Dの算出方法について説明する。
まず実空間の透視点Oから撮像面を焦点距離fの等価位置における寸法Q1Q2を算出する。
数式4のQ*1座標とQ*2座標を用いて、Q*1Q*2は、次式で表される。
Here, the dimension calculation method between the intersections in real space is demonstrated.
Since the method for calculating the dimension between the intersection points in the real space is the same as the actual dimension between the end points, a method for calculating the actual dimension D of the end point Q1Q2 of the measured straight line will be described here.
First, the dimension Q1Q2 at the equivalent position of the focal length f on the imaging surface is calculated from the perspective O in the real space.
Using the Q * 1 and Q * 2 coordinates of Equation 4, Q * 1Q * 2 is expressed by the following equation.
なお、姿勢パラメータγ=0の時は、次式で等価位置での被計測直線寸法を算出できる。 When the posture parameter γ = 0, the measured linear dimension at the equivalent position can be calculated by the following equation.
また、姿勢パラメータψ=0の時は、次式で等価位置での被計測直線寸法を算出できる。 When the posture parameter ψ = 0, the measured linear dimension at the equivalent position can be calculated by the following equation.
次に、数式5、数式9及び数式11を基に、始点画像、終点画像のそれぞれにおける被計測直線の実寸法Dを算出する。
始点画像及ぶ終点画像において、等価位置での寸法は、それぞれ次式で表わされる。
Next, the actual dimension D of the measured straight line in each of the start point image and the end point image is calculated based on Equations 5, 9, and 11.
In the start point image and the end point image, the dimensions at the equivalent position are expressed by the following equations, respectively.
次のステップS42は、ステップS3で取得された距離データ、すなわち、始点画像、終点画像それぞれを撮像した時の撮像レンズ中心から被計測点までの距離L1、L2に基づき、等価位置で得られた寸法D*s、D*fを撮像倍率補正して実空間内の寸法に補正する処理である。実空間内の被計測直線寸法と撮像面上の被計測直線像とは、撮像倍率ms、mfとすると、次式の関係がある。 The next step S42 is obtained at the equivalent position based on the distance data acquired in step S3, that is, the distances L1 and L2 from the center of the imaging lens to the measurement point when each of the start point image and the end point image is captured. In this process, the dimensions D * s and D * f are corrected to the dimensions in the real space by correcting the imaging magnification. The measured linear dimension in the real space and the measured linear image on the imaging surface have the following relationship when the imaging magnifications are ms and mf.
従って、数6式,数式13と数式15とを用いて、始点撮像画像おける実空間内における被計測直線の交点間寸法Dsは、次式で表せる。 Therefore, the inter-intersection dimension Ds of the measured straight line in the real space in the start-point captured image can be expressed by the following equation using Equation 6, Equation 13, and Equation 15.
以上、被計測直線のQ1とQ2端点間の実寸法Dsを算出したが、実空間内の交点間寸法diであっても、平面上に存在する交点であれば、同様な式で算出できることは明らかである。例えば、最隣接交点をQ1(x1,y1)、Q2(x2,y2)とすれば、最隣接交点間寸法d12(i=12)は、数式16と全く同じ式となる。 As described above, the actual dimension Ds between the end points Q1 and Q2 of the straight line to be measured is calculated, but even if it is the dimension di between the intersections in the real space, if it is an intersection existing on the plane, it can be calculated by the same formula. it is obvious. For example, if the nearest neighbor intersections are Q1 (x1, y1) and Q2 (x2, y2), the dimension d12 (i = 12) between the nearest neighbor intersections is exactly the same as Equation 16.
被計測直線上に端点間に交点が存在しない場合には、始点及び終点撮像に基づいて、算出された実空間内の交点間寸法が、Ds=Dfとなり実寸法Dは確定する。
なお、撮像素子としてCCDを用いて寸法を算出する際には、画像座標系の交点座標は画素数換算となるので縦横の画素サイズが必要となることはいうまでもない。
When there is no intersection between the end points on the measured straight line, the calculated dimension between the intersections in the real space is Ds = Df based on the start point and end point imaging, and the actual dimension D is determined.
In addition, when calculating a dimension using CCD as an image pick-up element, it cannot be overemphasized that since the intersection coordinate of an image coordinate system becomes the number of pixels conversion, vertical and horizontal pixel size is required.
本実施の形態では、横寸法計測について説明したが、縦寸法計測についても同様に算出できることは明らかである。
また、本実施の形態では始点画像、終点画像の焦点距離は同じとして寸法算出したが、異なる焦点距離であってもよい。
Although the horizontal dimension measurement has been described in the present embodiment, it is obvious that the vertical dimension measurement can be similarly calculated.
In this embodiment, the start point image and the end point image have the same focal length, and the dimensions are calculated. However, different focal lengths may be used.
数式16の寸法算出式よれば、実空間内における被計測直線上の隣接交点間寸法di、端点間寸法dは、撮像画像上の交点座標、焦点距離f及び距離データLとから算出できることがわかる。 According to the dimension calculation formula of Expression 16, it can be understood that the dimension di between the adjacent intersections and the dimension d between the end points on the measured straight line in the real space can be calculated from the intersection coordinates on the captured image, the focal distance f, and the distance data L. .
また、始点画像1枚の全交点間寸法が算出できているので、この撮像画像をメディアに記録し、再生画像を表示させ、Q2をマウスやペン入力により特定指示することにより、端点間Q1Q2寸法Dは求めることはできる。 In addition, since the size between all the intersections of one start point image can be calculated, this captured image is recorded on a medium, a reproduced image is displayed, and Q2 is specified with a mouse or pen input to specify the Q1Q2 size between end points. D can be determined.
次に、ステップS44では、被計測直線寸法Dを算出するために、始点及び終点撮像画像のそれぞれにおいて算出された被計測直線上の交点間寸法(交点列データと呼ぶ)を用いて、被計測直線の両端部に対応する2端点(始点、終点)を特定にするマッチング処理を行う。マッチング処理は、それぞれ視点の異なる位置から撮像された始点及び終点画像の2枚の画像間における対応点の探索をそれぞれの指定された被計測直線上において行う処理である。 Next, in step S44, in order to calculate the measured linear dimension D, the measurement is performed using the dimension between the intersections on the measured straight line (referred to as intersection sequence data) calculated in each of the start point and end point captured images. A matching process for specifying two end points (start point, end point) corresponding to both ends of the straight line is performed. The matching process is a process of searching for corresponding points between two images of a start point image and an end point image captured from different positions of the viewpoints on each designated straight line to be measured.
図13は、本実施の形態の図1の物品形状を撮像して取得された始点及び終点撮像画像の被計測直線上の交点列データである。
図13(a)、(b)は、それぞれ始点及び終点画像から得られたSi及びFj交点列データであり、図13(c)は、マッチング処理後確定された被計測直線Q1Q2の交点列データである。
FIG. 13 is intersection line data on the measurement target straight line of the start point and end point captured images acquired by imaging the article shape of FIG. 1 of the present embodiment.
FIGS. 13A and 13B are Si and Fj intersection sequence data obtained from the start and end images, respectively, and FIG. 13C is the intersection sequence data of the measured straight line Q1Q2 determined after the matching process. It is.
被計測直線上の交点、交点間寸法は、始点撮像画像ではSi(i=0,1,2)、dsi(i=0,1,2)、終点画像ではFj(j=0,1,2)、dfj(j=0,1,2)で示した。
図(a)のSi交点列データでは、端点S0は被計測部指定手段によりQ1と特定されているが、他端のQ2が特定されていない。図(b)のFj交点列データでは、端点F0はQ2と特定されているが、他端のQ1が特定されていない。2つの撮像画像ともに被計測直線の両端部を撮像しているので、Si交点列データを基準にして、Fj交点列データの端点F0についてSi交点列データのS2、S1と順次比較し、寸法の一致度を評価して特定すればよい。本実施の形態では、3点の交点しかないので簡単に被計測直線Dの端点F0が、Si交点列データの交点S2に対応することがわかり、被計測直線の両端部を特定できる。
The intersection point on the line to be measured and the dimension between the intersection points are Si (i = 0,1,2) and dsi (i = 0,1,2) in the start-point captured image, and Fj (j = 0,1,2) in the end-point image. ), Dfj (j = 0, 1, 2).
In the Si intersection sequence data of FIG. 5A, the end point S0 is identified as Q1 by the measured portion designating means, but the other end Q2 is not identified. In the Fj intersection sequence data in FIG. 5B, the end point F0 is identified as Q2, but the other end Q1 is not identified. Since both the captured images are taken at both ends of the straight line to be measured, the end point F0 of the Fj intersection point sequence data is sequentially compared with S2 and S1 of the Si intersection point sequence data on the basis of the Si intersection point sequence data. The degree of coincidence may be evaluated and specified. In this embodiment, since there are only three intersections, it can be easily understood that the end point F0 of the measured straight line D corresponds to the intersection S2 of the Si intersection sequence data, and both end portions of the measured straight line can be specified.
ステップS45では、被計測直線両端部の端点座標Q1及びQ2が確定されたので、実寸法Dは、数16式を用いて簡単に算出できる。
図14は、始点及び終点撮像画像の被計測直線上の交点数が異なり、多くの交点が存在する時の一般化したマッチング処理手段の動作フローであり、図15はその時の交点列データである。
In step S45, since the end point coordinates Q1 and Q2 of both ends of the measured straight line are determined, the actual dimension D can be easily calculated using the equation (16).
FIG. 14 is an operation flow of the generalized matching processing means when the number of intersection points on the measured straight line of the start point and end point captured images is different and there are many intersection points, and FIG. 15 is the intersection point sequence data at that time. .
ステップS50は、始点及び終点撮像画像のそれぞれにおいて複数の交点寸法列データを作成するステップである。寸法演算処理にて算出された各撮像画像の被計測直線上の交点(端点を含む)の個数及び交点間寸法に基づいて、始点及び終点画像それぞれの交点をラベリングして交点列データSi、Fjを作成する。図15(a),(b)は、始点及び終点撮像におけるラベリングされた交点列データを説明する図である。始点画像において、交点S0は、始点として特定された端点q1であり、実空間の被計測直線の端部Q1に対応する。交点数はm個、交点間寸法はdsi(i=1,・・・,m)である。この交点列データでは終点は不明である。同様に図(b)の終点画像において、交点F0は、終点として特定された端点q2であり、実空間内の被計測直線の端部Q2に対応する。交点数はn個、交点間寸法はdfj(j=1,・・・,n)である。 Step S50 is a step of creating a plurality of intersection dimension string data in each of the start point and end point captured images. Based on the number of intersection points (including end points) on the measured straight line of each captured image calculated in the dimension calculation process and the dimension between the intersection points, the intersection points of the start point image and the end point image are labeled and intersection point sequence data Si, Fj Create FIGS. 15A and 15B are diagrams for explaining labeled intersection point sequence data in the start point and end point imaging. In the start point image, the intersection point S0 is the end point q1 specified as the start point, and corresponds to the end portion Q1 of the measured straight line in real space. The number of intersection points is m, and the dimension between the intersection points is dsi (i = 1,..., M). In this intersection sequence data, the end point is unknown. Similarly, in the end point image of FIG. 5B, the intersection point F0 is the end point q2 specified as the end point, and corresponds to the end portion Q2 of the measured straight line in the real space. The number of intersection points is n, and the dimension between the intersection points is dfj (j = 1,..., N).
図14のマッチング処理の動作フローは、Fj交点列データのF0F1(df1)データをSi交点列データの後列データSm-1Sm(dsm)から順次、寸法差を比較判断する処理であり、Si交点列データ上において終点を探索する動作の例である。 The operation flow of the matching process in FIG. 14 is a process of sequentially comparing and determining the dimensional difference of the Fj intersection sequence data F0F1 (df1) data from the subsequent sequence data Sm-1Sm (dsm) of the Si intersection sequence data. It is an example of the operation | movement which searches for an end point on data.
ステップS53では終点列寸法データを取得し、ステップS55では始点列寸法データSm-1Sm(dsm)を取得する。次のステップS56では、これら隣接交点間寸法のdf1とdsmとを寸法差を算出し、ステップS57の繰り返し処理により、列データF0F1(df1)は8i交点列データの全てに対して寸法差を算出する。ステップS58では、これらの寸法差データに基づいて、Si交点列データに対する交点(端点)F0の一致度の判断を行い、一致度が高いと判断されれば、ステップS60をへてステップS52に戻り、次の列データF1F2(df2)を取得して同様な処理が繰り返し行われる。また、ステップS58で一致度が低いと判断されれば、Si交点列データには交点F0は存在しないと判断され、ステップS59の計測不可表示され終了する。なお、ステップS60では、Si列データとFj列データとの比較であるため、|m−n|+1回の繰り返し処理で全ての寸法比較が終了し、次のステップS61で、Si交点列データ上における端点F0が特定される。従って、これらS0F0に対応する実空間内における被計測直線の両端Q1Q2が特定することができる。 In step S53, end point sequence dimension data is acquired, and in step S55, start point sequence dimension data Sm-1Sm (dsm) is acquired. In the next step S56, a dimensional difference is calculated for the dimensions df1 and dsm of these adjacent intersections, and the column data F0F1 (df1) is calculated for all of the 8i intersection column data by repeating the process in step S57. To do. In step S58, the degree of coincidence of the intersection (end point) F0 with respect to the Si intersection point sequence data is determined based on these dimension difference data. If it is determined that the degree of coincidence is high, the process returns to step S52 through step S60. The next column data F1F2 (df2) is acquired and the same processing is repeated. If it is determined in step S58 that the degree of coincidence is low, it is determined that the intersection point F0 does not exist in the Si intersection point sequence data, and the measurement impossibility display in step S59 is terminated. In step S60, since it is a comparison between the Si column data and the Fj column data, all the dimensional comparisons are completed by | m−n | +1 iteration processing, and in the next step S61, the Si intersection column data is overwritten. The end point F0 at is specified. Therefore, both ends Q1Q2 of the straight line to be measured in the real space corresponding to S0F0 can be specified.
ステップS58における寸法差の一致度の評価は、計測誤差を勘案して経験的な値を設定して行う。また、ステップS55での比較結果を一時的にメモリに記憶しておき、ステップS58で取得された寸法差で総合的に評価し、得られた最隣接交点間寸法の組み合わせの中で最も一致している判断された列データを選択するようにしてもよい。 The evaluation of the degree of coincidence of dimensional differences in step S58 is performed by setting empirical values in consideration of measurement errors. Further, the comparison result in step S55 is temporarily stored in the memory, and comprehensively evaluated by the dimensional difference acquired in step S58, and the closest combination among the obtained combinations of the dimensions between the adjacent intersections. The determined column data may be selected.
以上説明したマッチング処理は、寸法差比較としたが、交点数が少なくまた交点数が同じである場合などは、何番目に対応するかわかればよいので厳密な寸法比較は必ずしも行う必要はない。 The matching process described above is a dimensional difference comparison. However, when the number of intersections is small and the number of intersections is the same, it is only necessary to know what number corresponds, so it is not always necessary to perform a strict dimension comparison.
最終的に被計測寸法Dを算出するにあたり、始点撮像画像または終点撮像画像のいずれかを一方を用いることになるが、その選択基準は、焦点距離が異なる場合はより長い焦点距離で撮像した撮像画像を用い、姿勢パラメータβ、γ、ψについてはより小さい角度にて撮像した撮像画像を用いることが望ましい。 In calculating the dimension D to be measured finally, one of the start-point captured image and the end-point captured image is used. The selection criterion is an image captured at a longer focal length when the focal length is different. It is desirable to use a captured image captured at a smaller angle for the posture parameters β, γ, and ψ using an image.
また、本実施の形態では、撮像範囲内に収まる被計測体の寸法計測を始点及び終点の2回の撮像動作により計測する例であったが、この動作を繰り返すことにより、撮像範囲に収まらない長尺形状を有する被計測体に対しても適用は可能である。 Further, in the present embodiment, the measurement of the dimension of the measurement object that falls within the imaging range is an example of measuring by two imaging operations of the start point and the end point. However, by repeating this operation, the measurement object does not fall within the imaging range. The present invention can also be applied to a measurement object having a long shape.
以上のように、本発明の画像計測装置は、1対の平行辺とその平行辺に直交する辺によって形成される平面であれば、3次元的位置関係が未知の被計測体であっても、姿勢パラメータ演算や物寸法計測演算などが煩雑な演算が不要で簡単に算出できるため、高価な測量機器を使用しなくても誰もが低価格で短時間に物体計測を可能とするので幅広い普及が期待できる。
さらに本実施の形態では、汎用のデジタルカメラ1台を用いて、“その場で”しかも非接触で寸法計測が行えるため、建築現場や危険な場所にある物体の形状計測など広範な用途が期待できる。
As described above, the image measurement apparatus of the present invention is a measurement object whose three-dimensional positional relationship is unknown as long as it is a plane formed by a pair of parallel sides and a side orthogonal to the parallel sides. , Attitude parameter calculation and object dimension measurement calculation, etc. can be easily calculated without complicated calculations, so everyone can measure objects at low cost in a short time without using expensive surveying equipment It can be expected to spread.
Furthermore, in this embodiment, a single general-purpose digital camera can be used to measure dimensions “on the spot” and in a non-contact manner. it can.
1 撮像手段
2 被計測部指定手段
4 距離計測手段
10 画像処理手段
11計測演算手段
110姿勢演算手段
120寸法演算手段
130マッチング処理手段
100 画像計測装置本体
200 被計測体
DESCRIPTION OF
Claims (19)
1対の平行直線部と該平行直線部と直交する直線部とを有する被計測体と、
前記直線部を指定する基準線が設けられた被計測部指定手段と、
前記被計測部指定手段により前記直線部を指定した状態で前記被計測体を撮像する撮像手段と、
前記撮像手段と前記被計測体上の被計測点との距離を計測する距離計測手段と、
前記撮像手段により撮像された画像に基づいて、直線成分を検出する直線検出手段と前記直線検出手段により検出された直線と前記被計測部指定手段により指定された直線部との交点座標を特定する交点座標特定手段とを有した画像処理手段と、
前記画像処理手段により特定された交点座標に基づいて、前記被計測体を特徴付ける平面形成し、前記撮像面に対する前記平面の姿勢パラメータを算出する姿勢演算手段と、
前記姿勢演算手段により算出した姿勢パラメータと前記距離計測手段により検出された距離とに基づいて、前記被計測直線の寸法を演算する寸法演算手段とを備えたことを特徴とする画像計測装置。 An image measuring device for measuring dimensions based on a captured image of a measurement object,
An object to be measured having a pair of parallel straight portions and a straight portion perpendicular to the parallel straight portions;
A to-be-measured part specifying means provided with a reference line for specifying the straight line part;
Imaging means for imaging the measured object in a state where the straight line portion is designated by the measured portion designation means;
Distance measuring means for measuring a distance between the imaging means and a measurement point on the measurement object;
Based on the image picked up by the image pickup means, the coordinates of the intersection between the straight line detection means for detecting the straight line component, the straight line detected by the straight line detection means and the straight line portion specified by the measurement target portion specifying means are specified. Image processing means having intersection coordinate specifying means;
A posture calculation means for forming a plane characterizing the object to be measured based on the intersection coordinates specified by the image processing means, and calculating a posture parameter of the plane with respect to the imaging surface;
An image measurement apparatus comprising: a dimension calculation unit that calculates a dimension of the measured straight line based on a posture parameter calculated by the posture calculation unit and a distance detected by the distance measurement unit.
1対の平行直線部と該平行直線部と直交する被計測直線部とを有する被計測体と、
前記被計測直線部を指定する基準線が設けられた被計測部指定手段と、
前記被計測部指定手段により指定された前記被計測直線部の一方の端部を撮像する撮像手段と、
前記撮像手段と前記被計測体上の被計測点との距離を計測する距離計測手段と、
前記撮像手段により撮像された画像に基づいて、検出された直線成分と前記被計測部指定手段により指定された被計測直線との交点座標を特定する画像処理手段と、
前記画像処理手段により特定された交点座標に基づいて、被計測体を特徴付ける平面を形成し、前記撮像面に対する前記平面の姿勢パラメータを算出する姿勢演算手段と、
前記姿勢演算手段及び前記距離計測手段により算出された姿勢パラメータと距離データとに基づいて、前記被計測直線上の交点間寸法を演算する寸法演算手段と、
前記寸法演算手段により演算された交点間寸法値に基づいて、前記1対の撮像画像間の対応点を特定するマッチング処理手段を備えたことを特徴とする画像計測装置。 An image measurement device that measures the dimensions of a measurement object based on a pair of captured images captured from two different viewpoints,
A measured object having a pair of parallel straight line portions and a measured straight line portion orthogonal to the parallel straight line portions;
A measured portion specifying means provided with a reference line for specifying the measured straight portion;
Imaging means for imaging one end of the measured straight line portion specified by the measured portion specifying means;
Distance measuring means for measuring a distance between the imaging means and a measurement point on the measurement object;
Image processing means for specifying the intersection coordinates of the detected straight line component and the measured straight line specified by the measured part specifying means based on the image captured by the imaging means;
Based on the intersection coordinates specified by the image processing means, forming a plane characterizing the object to be measured, and calculating a posture parameter of the plane with respect to the imaging surface;
Based on the posture parameters and distance data calculated by the posture calculation means and the distance measurement means, dimension calculation means for calculating the dimension between the intersection points on the measured straight line;
An image measuring apparatus comprising: matching processing means for specifying corresponding points between the pair of captured images based on a dimension value between intersections calculated by the dimension calculating means.
1対の平行直線部と該平行直線部と直交する直線部とを有する被計測体と、
前記被計測体の計測部を撮像レンズの光軸で指示できる被計測部指定手段と、
前記被計測部指定手段により指示された前記被計測体を撮像する撮像手段と、
前記撮像手段により取得された撮像画像に基づいて、前記光軸に一致させた撮像面の中心を原点として被計測体を特徴付ける交点座標を算出する画像処理手段と
前記画像処理手段により得られた交点座標に基づいて、被計測体を特徴付ける平面を形成し、前記撮像面に対する前記平面の姿勢パラメータを演算する姿勢演算手段とを備えたことを特徴とする被計測体の平面姿勢を計測する画像計測装置。 An image measurement device that measures a planar orientation of a measurement object based on a captured image,
An object to be measured having a pair of parallel straight portions and a straight portion perpendicular to the parallel straight portions;
A measurement target specifying unit capable of specifying the measurement unit of the measurement target with the optical axis of the imaging lens;
Imaging means for imaging the measurement object instructed by the measurement target specifying means;
Based on the captured image acquired by the imaging unit, the intersection obtained by the image processing unit that calculates the intersection coordinates characterizing the measurement object with the center of the imaging surface coincident with the optical axis as the origin An image measurement for measuring a plane attitude of the measurement object, comprising: a plane that characterizes the measurement object based on the coordinates; and an attitude calculation unit that calculates an attitude parameter of the plane with respect to the imaging surface apparatus.
前記エッジ処理された画像から直線を検出する直線検出手段と、
前記直線検出手段により検出された直線と前記被計測指定手段により指定された被計測直線と交わる交点座標を特定する交点座標特定手段とを備えたことを特徴とする請求項1から3のいずれかに記載の画像計測装置。 The image processing means includes edge processing means for edge processing;
Straight line detection means for detecting a straight line from the edge-processed image;
4. An intersection coordinate specifying means for specifying an intersection coordinate that intersects a straight line detected by the straight line detecting means and a measured straight line specified by the measured measurement specifying means. The image measuring device described in 1.
距離計測手段により撮像手段と被計測点との距離を計測するステップと、
撮像手段により取得した画像上の直線成分を検出し、検出された直線と前記指定された直線部との交点座標を特定する交点座標特定する画像処理ステップと、
前記画像処理ステップにより特定された交点座標に基づいて、前記被計測体を特徴付ける平面を形成し、前記撮像面に対する前記平面の姿勢パラメータを算出する姿勢演算ステップと、
前記姿勢演算ステップ及び前記距離計測ステップにより算出した姿勢パラメータと距離データとに基づいて、前記被計測直線上の交点間寸法を演算する寸法演算ステップと、
を含むことを特徴とする画像計測方法。 Measure the dimension of the measurement object based on the captured image with the measurement object specifying means specifying the measurement object having a parallel straight line part and a straight line part orthogonal to the parallel straight line part. An image measurement method for
Measuring the distance between the imaging means and the point to be measured by the distance measuring means;
An image processing step of detecting a straight line component on the image acquired by the imaging means and specifying an intersection coordinate between the detected straight line and the specified straight line portion;
A posture calculation step of forming a plane characterizing the object to be measured based on the intersection coordinates specified by the image processing step, and calculating a posture parameter of the plane with respect to the imaging surface;
Based on the posture parameters and distance data calculated by the posture calculation step and the distance measurement step, a dimension calculation step for calculating a dimension between intersection points on the measured straight line;
An image measurement method comprising:
距離計測手段により撮像手段と被計測点との距離を計測するステップと、
撮像手段により取得した撮像画像上の直線成分を検出し、検出された直線と前記指定された被計測直線との交点座標を特定する交点座標特定する画像処理ステップと、
前記画像処理ステップにより特定された交点座標に基づいて、前記被計測体を特徴付ける平面を形成し、前記撮像面に対する前記平面の姿勢パラメータを算出する姿勢演算ステップと、
前記姿勢演算ステップ及び前記距離計測ステップにより算出した姿勢パラメータと距離データとに基づいて、前記被計測直線上の交点間寸法を演算する寸法演算ステップと、
前記寸法演算ステップにより演算された交点間寸法値に基づいて、前記1対の撮像画像間の対応点を特定するマッチング処理ステップとを含むことを特徴とする画像計測方法。 A pair of imagings of an object to be measured having a parallel straight line part and a straight line part orthogonal to the parallel straight line part from two different viewpoints with one end of the measured straight line part designated by the measured part designating means An image measurement method for measuring a dimension of the measurement object based on an image,
Measuring the distance between the imaging means and the point to be measured by the distance measuring means;
An image processing step of detecting a linear component on the captured image acquired by the imaging means and specifying an intersection coordinate between the detected straight line and the specified measured straight line;
A posture calculation step of forming a plane characterizing the object to be measured based on the intersection coordinates specified by the image processing step, and calculating a posture parameter of the plane with respect to the imaging surface;
Based on the posture parameters and distance data calculated by the posture calculation step and the distance measurement step, a dimension calculation step for calculating a dimension between intersection points on the measured straight line;
And a matching processing step of identifying corresponding points between the pair of captured images based on the dimension value between the intersections calculated in the dimension calculation step.
前記撮像手段により取得された撮像画像に基づいて、撮像面の中心を原点として被計測体を特徴付ける交点座標を算出する画像処理ステップと
前記画像処理ステップにより得られた交点座標に基づいて、被計測体を特徴付ける平面を形成し、前記撮像面に対する前記平面の姿勢パラメータを演算する姿勢演算ステップとを含むことを特徴とする被計測体の平面の姿勢を計測する画像計測方法。 Based on an image captured in a state in which the measurement unit of the measurement target having a pair of parallel straight line portions and a straight line portion orthogonal to the parallel straight line portions is indicated by the optical axis of the imaging lens, the plane of the measurement target is measured. An image measurement method for measuring posture,
Based on the captured image acquired by the imaging means, an image processing step for calculating an intersection coordinate characterizing the measured object with the center of the imaging surface as an origin, and an intersection measurement point obtained by the image processing step An image measurement method for measuring a plane posture of a measurement object, comprising: a posture calculation step of forming a plane characterizing the body and calculating a posture parameter of the plane with respect to the imaging surface.
前記エッジ処理された画像から直線を検出する直線検出ステップと、
前記直線検出ステップにより検出された直線と前記被計測指定手段により指定された被計測直線と交わる交点座標を特定する交点座標特定ステップとを含むことを特徴とする請求項12から14のいずれかに記載の画像計測方法。 The image processing step includes an edge processing step for edge processing;
A straight line detecting step for detecting a straight line from the edge-processed image;
15. The intersection point coordinate specifying step of specifying an intersection point coordinate that intersects the straight line detected by the straight line detection step and the measured straight line specified by the measurement target specifying means. The image measurement method described.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005143317A JP2006317418A (en) | 2005-05-16 | 2005-05-16 | Image measuring device, image measurement method, measurement processing program, and recording medium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005143317A JP2006317418A (en) | 2005-05-16 | 2005-05-16 | Image measuring device, image measurement method, measurement processing program, and recording medium |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2006317418A true JP2006317418A (en) | 2006-11-24 |
Family
ID=37538206
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005143317A Pending JP2006317418A (en) | 2005-05-16 | 2005-05-16 | Image measuring device, image measurement method, measurement processing program, and recording medium |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2006317418A (en) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008232855A (en) * | 2007-03-20 | 2008-10-02 | Fujitsu Ltd | Relative position calculation device, relative position adjustment device, relative position adjustment method, and relative position adjustment program |
| JP2009186364A (en) * | 2008-02-07 | 2009-08-20 | Nec Corp | Data processing apparatus, pose estimation system, pose estimation method, and program |
| WO2014084181A1 (en) * | 2012-11-30 | 2014-06-05 | シャープ株式会社 | Image measurement device |
| CN111504269A (en) * | 2020-05-26 | 2020-08-07 | 南方电网调峰调频发电有限公司 | Underwater scale measuring method and device |
| JP2022063582A (en) * | 2020-10-12 | 2022-04-22 | 株式会社神戸製鋼所 | Round rod body length measurement device and method |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH087102A (en) * | 1994-06-17 | 1996-01-12 | Canon Inc | Correspondent point extracting device |
| JPH095050A (en) * | 1995-06-20 | 1997-01-10 | Olympus Optical Co Ltd | Three-dimensional image measuring apparatus |
| JP2001148025A (en) * | 1999-09-07 | 2001-05-29 | Nikon Gijutsu Kobo:Kk | Position detecting apparatus and method, plane attitude detecting apparatus and method |
| JP2001317915A (en) * | 2000-05-08 | 2001-11-16 | Minolta Co Ltd | Three-dimensional measurement apparatus |
| JP2004170277A (en) * | 2002-11-20 | 2004-06-17 | 3D Media Co Ltd | 3-dimensional measurement method, 3-dimensional measurement system, image processing apparatus, and computer program |
-
2005
- 2005-05-16 JP JP2005143317A patent/JP2006317418A/en active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH087102A (en) * | 1994-06-17 | 1996-01-12 | Canon Inc | Correspondent point extracting device |
| JPH095050A (en) * | 1995-06-20 | 1997-01-10 | Olympus Optical Co Ltd | Three-dimensional image measuring apparatus |
| JP2001148025A (en) * | 1999-09-07 | 2001-05-29 | Nikon Gijutsu Kobo:Kk | Position detecting apparatus and method, plane attitude detecting apparatus and method |
| JP2001317915A (en) * | 2000-05-08 | 2001-11-16 | Minolta Co Ltd | Three-dimensional measurement apparatus |
| JP2004170277A (en) * | 2002-11-20 | 2004-06-17 | 3D Media Co Ltd | 3-dimensional measurement method, 3-dimensional measurement system, image processing apparatus, and computer program |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008232855A (en) * | 2007-03-20 | 2008-10-02 | Fujitsu Ltd | Relative position calculation device, relative position adjustment device, relative position adjustment method, and relative position adjustment program |
| JP2009186364A (en) * | 2008-02-07 | 2009-08-20 | Nec Corp | Data processing apparatus, pose estimation system, pose estimation method, and program |
| WO2014084181A1 (en) * | 2012-11-30 | 2014-06-05 | シャープ株式会社 | Image measurement device |
| JP5951043B2 (en) * | 2012-11-30 | 2016-07-13 | シャープ株式会社 | Image measuring device |
| CN111504269A (en) * | 2020-05-26 | 2020-08-07 | 南方电网调峰调频发电有限公司 | Underwater scale measuring method and device |
| CN111504269B (en) * | 2020-05-26 | 2024-04-19 | 南方电网调峰调频发电有限公司 | Underwater scale measurement method and device thereof |
| JP2022063582A (en) * | 2020-10-12 | 2022-04-22 | 株式会社神戸製鋼所 | Round rod body length measurement device and method |
| JP7335859B2 (en) | 2020-10-12 | 2023-08-30 | 株式会社神戸製鋼所 | ROUND BAR LENGTH MEASURING DEVICE AND METHOD |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10825198B2 (en) | 3 dimensional coordinates calculating apparatus, 3 dimensional coordinates calculating method, 3 dimensional distance measuring apparatus and 3 dimensional distance measuring method using images | |
| US11629955B2 (en) | Dual-resolution 3D scanner and method of using | |
| JP5580164B2 (en) | Optical information processing apparatus, optical information processing method, optical information processing system, and optical information processing program | |
| JP5480914B2 (en) | Point cloud data processing device, point cloud data processing method, and point cloud data processing program | |
| US10060739B2 (en) | Method for determining a position and orientation offset of a geodetic surveying device and such a surveying device | |
| JP4885584B2 (en) | Rangefinder calibration method and apparatus | |
| JP5745178B2 (en) | Three-dimensional measurement method, apparatus and system, and image processing apparatus | |
| CN109801333B (en) | Volume measurement method, device and system and computing equipment | |
| WO2014061372A1 (en) | Image-processing device, image-processing method, and image-processing program | |
| JP5388921B2 (en) | Three-dimensional distance measuring apparatus and method | |
| JP2012058076A (en) | Three-dimensional measurement device and three-dimensional measurement method | |
| JPWO2014002725A1 (en) | Three-dimensional measurement method, apparatus and system, and image processing apparatus | |
| WO2014084181A1 (en) | Image measurement device | |
| US11222433B2 (en) | 3 dimensional coordinates calculating apparatus and 3 dimensional coordinates calculating method using photo images | |
| JP5051493B2 (en) | 3D measurement marker and 3D measurement method using the same | |
| CN114018167A (en) | A bridge deflection measurement method based on monocular 3D vision | |
| JP4837538B2 (en) | End position measuring method and dimension measuring method | |
| JP3842988B2 (en) | Image processing apparatus for measuring three-dimensional information of an object by binocular stereoscopic vision, and a method for recording the same, or a recording medium recording the measurement program | |
| JP2017151026A (en) | Three-dimensional information acquiring device, three-dimensional information acquiring method, and program | |
| CN109493378B (en) | Verticality detection method based on combination of monocular vision and binocular vision | |
| JP2006317418A (en) | Image measuring device, image measurement method, measurement processing program, and recording medium | |
| JP4550081B2 (en) | Image measurement method | |
| JP4590592B2 (en) | Three-dimensional measuring apparatus and three-dimensional measuring method | |
| CN114266835A (en) | A deformation monitoring control method and system for a non-measuring camera | |
| JP4351090B2 (en) | Image processing apparatus and image processing method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080310 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20080529 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20081127 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100831 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100907 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20110111 |