JP2006293531A - Vehicle driving support device - Google Patents
Vehicle driving support device Download PDFInfo
- Publication number
- JP2006293531A JP2006293531A JP2005110991A JP2005110991A JP2006293531A JP 2006293531 A JP2006293531 A JP 2006293531A JP 2005110991 A JP2005110991 A JP 2005110991A JP 2005110991 A JP2005110991 A JP 2005110991A JP 2006293531 A JP2006293531 A JP 2006293531A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- driving
- driving mode
- driver
- evaluation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000011156 evaluation Methods 0.000 claims abstract description 52
- 238000012544 monitoring process Methods 0.000 claims abstract description 23
- 230000001133 acceleration Effects 0.000 description 13
- 230000006399 behavior Effects 0.000 description 9
- 238000012545 processing Methods 0.000 description 7
- 238000004364 calculation method Methods 0.000 description 4
- 238000000034 method Methods 0.000 description 4
- 230000000007 visual effect Effects 0.000 description 4
- 230000008859 change Effects 0.000 description 3
- 238000004891 communication Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 239000006185 dispersion Substances 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 238000003384 imaging method Methods 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 206010039203 Road traffic accident Diseases 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000036760 body temperature Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
Images

Landscapes
- Traffic Control Systems (AREA)
Abstract
【課題】 本発明は、後方車両の挙動の監視情報に基づいて運転支援することによって運転者が回避運転をすることができる車両用運転支援装置の提供を目的とする。
【解決手段】 自車の後方を監視する後方車間センサ1と、後方車間センサ1による監視情報(後方車両の車速、自車との相対距離、自車との相対速度及び後方車両の運転者の状況)から後方車両の運転態様を推定し、その推定された運転態様を所定の運転評価基準に基づき評価するパフォーマンス判定処理ECU4と、そのECU4による評価結果に応じた報知動作を自車の運転者に対して実行するディスプレイ・スピーカ6とを備える車両用運転支援装置。
【選択図】 図1PROBLEM TO BE SOLVED: To provide a driving support device for a vehicle that allows a driver to perform avoidance driving by providing driving support based on monitoring information of behavior of a rear vehicle.
SOLUTION: A rear inter-vehicle sensor 1 for monitoring the rear of the own vehicle and monitoring information by the rear inter-vehicle sensor 1 (vehicle speed of the rear vehicle, relative distance to the own vehicle, relative speed to the own vehicle, and the driver of the rear vehicle) A situation determination) ECU 4 estimates the driving mode of the rear vehicle, and evaluates the estimated driving mode based on a predetermined driving evaluation standard, and notifies the driver of the vehicle of the notification operation according to the evaluation result by the ECU 4. A vehicle driving support device comprising a display and a speaker 6 that are executed on the vehicle.
[Selection] Figure 1
Description
本発明は、自車後方の情報を運転者に報知して運転を支援する車両用運転支援装置に関する。 The present invention relates to a vehicle driving support apparatus that supports driving by informing a driver of information behind the vehicle.
従来から、後方からの追突が予知されたときに、その衝撃に備えるため、シートベルトによる乗員の拘束性を高める技術が知られている(例えば、特許文献1参照)。
ところで、挙動不審な車両や運転技量が低いドライバーが運転していると思われる車両が運転中に近くに現れると、安全確保のために、多くのドライバーがそれらの車両から離れようとしたり、それらの車両に対してより高い注意を払おうとしたりする。このような危険回避行動は、自車前方の車両に対しては比較的行いやすいが、自車後方の車両に対しては行ないにくい。したがって、知らぬ間にそれらの車両に接近してしまい、リスクの高い場面に遭遇する可能性がある。 By the way, if a vehicle with suspicious behavior or a driver with a low driving skill appears nearby while driving, many drivers try to move away from them to ensure safety. Try to pay more attention to other vehicles. Such danger avoidance behavior is relatively easy for a vehicle in front of the host vehicle, but is difficult to perform for a vehicle behind the host vehicle. Therefore, you may get close to those vehicles without knowing and you may encounter a high-risk scene.
この点、上述の従来技術は、後方車両を検出して追突の予知を行っているが、物理的に追突が発生する段階での支援技術であるため、上記のような車両に起因する危険を回避したいという要望に対応することができない。 In this regard, the above-described conventional technology predicts a rear-end collision by detecting a rear vehicle. However, since it is a support technology at the stage where a rear-end collision occurs physically, there is a risk caused by the above-described vehicle. It is not possible to meet the desire to avoid.
そこで、本発明は、後方車両の挙動の監視情報に基づいて運転支援することによって運転者が回避運転をすることができる車両用運転支援装置の提供を目的とする。 Therefore, an object of the present invention is to provide a vehicle driving support device that enables a driver to perform avoidance driving by driving support based on monitoring information of behavior of a rear vehicle.
上記課題を解決するため、本発明の一局面によれば、
自車の後方を監視する監視手段と、
前記監視手段による監視情報から後方車両の運転態様を推定する運転態様推定手段と、
前記推定された運転態様を所定の運転評価基準に基づき評価する運転態様評価手段と、
前記運転態様評価手段による評価結果に応じた報知動作を自車の運転者に対して実行する報知手段とを備える車両用運転支援装置が提供される。
In order to solve the above problems, according to one aspect of the present invention,
Monitoring means for monitoring the back of the vehicle;
Driving mode estimating means for estimating the driving mode of the rear vehicle from the monitoring information by the monitoring means;
Driving mode evaluation means for evaluating the estimated driving mode based on a predetermined driving evaluation standard;
A vehicle driving support device is provided that includes notification means for executing a notification operation according to an evaluation result by the driving mode evaluation means for a driver of the host vehicle.
本局面によれば、後方車両の運転態様が評価されて自車の運転者への報知支援が行なわれるので、自車の運転者は後方を意識していなくても若しくは後方を意識しすぎることなく適切な運転操作を行なうことができる。 According to this aspect, the driving mode of the vehicle behind the vehicle is evaluated, and notification support to the driver of the vehicle is performed, so that the driver of the vehicle does not recognize the rear or is too conscious of the rear. Therefore, an appropriate driving operation can be performed.
また、前記報知手段は、前記運転態様評価手段が前記推定された運転態様について前記運転評価基準より下回る評価をした場合にその旨を報知することが好ましい。 Moreover, it is preferable that the said alerting | reporting means alert | reports that when the said driving | operation aspect evaluation means evaluates less than the said driving | operation evaluation reference | standard about the said estimated driving | operation aspect.
これにより、自車の運転者は、危険な運転の車両や技量の低い運転の車両が後方にいることを認識できるので、危険を回避する運転を適切に行なうことができる。 As a result, the driver of the own vehicle can recognize that a dangerous driving vehicle or a low-skilled driving vehicle is behind, and thus can appropriately perform driving that avoids danger.
ここで、前記監視情報は、後方車両の車速、自車との相対距離、自車との相対速度の少なくとも一つであることが好ましい。また、前記監視手段は、後方車両の運転者の状況を前記監視情報として撮像することが好適である。 Here, it is preferable that the monitoring information is at least one of a vehicle speed of a rear vehicle, a relative distance to the own vehicle, and a relative speed to the own vehicle. Moreover, it is preferable that the monitoring means captures the situation of the driver of the rear vehicle as the monitoring information.
本発明によれば、後方車両の挙動の監視情報に基づいて運転支援することによって運転者に対して危険回避運転を促し追突の危険性を軽減することができる。 ADVANTAGE OF THE INVENTION According to this invention, a driving | operation assistance is promoted based on the monitoring information of the behavior of a back vehicle, a danger avoidance driving | operation can be promoted with respect to a driver | operator, and the danger of a rear-end collision can be reduced.
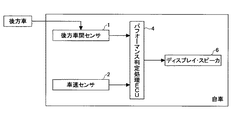
以下、図面を参照して、本発明を実施するための最良の形態の説明を行う。図1は本発明の車両用運転支援装置のシステム構成の一例である。 The best mode for carrying out the present invention will be described below with reference to the drawings. FIG. 1 shows an example of a system configuration of a vehicle driving support apparatus according to the present invention.
後方車間センサ1は、ミリ波レーダ、レーザーレーダ、超音波レーダ等であって、自車の後方を監視し、自車と後方車両との車間関係値(相対距離、相対速度、車間時間等)を測定するものである。相対距離や車間時間は、レーダが送受信する波の送受信タイミングと波の速さとの関係から容易に算出可能である。算出された相対距離の時間変化から相対速度が求められる。なお、相対速度の時間変化から相対加速度を求めることも可能である。また、レーダが後方をスキャニングする際の反射範囲の大きさによって、車両の大きさも測定可能である。これにより、例えば、トラックと一般車両とオートバイの区別をすることも可能である。
The rear
後方車間センサ1はカメラでもよい。カメラの場合には、左右に配置された撮像素子(CCD:Charge Coupled Device)による撮像画像間の視差を求めることによって、相対距離が算出され得る。一方の撮像素子による画像と他方の撮像素子による画像とを重ね合わせると、撮像対象車両が左右横方向にずれる。そして、片方の画像を1画素ずつシフトしながら最も重なり合う位置を求める。このときシフトした画素数をnとする。レンズの焦点距離をf、光軸間の距離をm、画素ピッチをdとすると、自車から撮像対象車両までの相対距離Lは、L=(f・m)/(n・d)という関係式が成立する。なお、(n・d)を視差という。この関係式に基づいて算出された相対距離Lから、上記と同様にして、相対速度や相対加速度が算出可能である。
The rear
また、カメラの使用によって、後方車両の視覚的な情報(例えば、形状、色、パッシングの有無)や後方車両の運転者の状況(例えば、居眠り運転、よそ見運転、携帯電話操作等の注意散漫な運転)を画像処理技術や視線検出技術等を用いて取得することを可能にする。 Also, by using the camera, distractions such as visual information of the rear vehicle (eg, shape, color, presence / absence of passing) and the situation of the driver of the rear vehicle (eg, drowsy driving, looking away driving, cell phone operation, etc.) Driving) can be acquired using an image processing technique, a line-of-sight detection technique, or the like.
自車の後方を監視するに際し、上記のレーダやカメラを独立して使用しても併用してもよい。併用すれば、自車の後方を監視する精度を向上させることができる。 When monitoring the back of the vehicle, the above radar and camera may be used independently or in combination. If used together, the accuracy of monitoring the rear of the vehicle can be improved.
車速センサ2は、車輪等の回転を検出して自車の速度を計測するものである。なお、その計測された自車の速度の時間変化から自車の加速度を求めることも可能である。 The vehicle speed sensor 2 detects the rotation of a wheel or the like and measures the speed of the own vehicle. It is also possible to obtain the acceleration of the own vehicle from the time change of the measured speed of the own vehicle.
パフォーマンス判定処理ECU4は、後方車間センサ1及び車速センサ2による監視情報に基づいて後方車両の運転態様を推定し、後方車両の運転パフォーマンスについての評価をするものである。例えば、挙動不審な運転態様や、危険走行をする運転態様や、おぼつかない走行をする運転態様は、運転パフォーマンスが低いと評価される。
The performance determination processing ECU 4 estimates the driving mode of the rear vehicle based on monitoring information from the rear
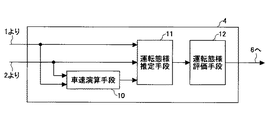
図2は、パフォーマンス判定処理ECU4の構成を示すブロック図である。パフォーマンス判定処理ECU4は、後方車両車速演算手段10、後方車両運転態様推定手段11及び運転態様評価手段12を備える。各構成手段は、CPU,RAM,そのプログラムを格納するROM及び電子回路等によって実現される。
FIG. 2 is a block diagram illustrating a configuration of the performance determination process ECU 4. The performance determination processing ECU 4 includes a rear vehicle vehicle
車速演算手段10は、後方車間センサ1によって求められた相対速度と車速センサ2によって計測された自車の速度との関係に基づいて後方車両の速度を求めるものである。後方車両の速度は、相対速度と自車の速度との差である。なお、上述した相対加速度と自車の加速度との関係に基づいて後方車両の加速度を求めることも可能である。後方車両の加速度は、相対加速度と自車の加速度との差である。
The vehicle speed calculation means 10 obtains the speed of the rear vehicle based on the relationship between the relative speed obtained by the rear
運転態様推定手段11は、後方車間センサ1及び車速センサ2による監視情報や車速演算手段10による後方車両の車速情報から後方車両の運転態様を推定するものである。
The driving mode estimation unit 11 estimates the driving mode of the rear vehicle from the monitoring information from the rear
運転態様評価手段12は、運転態様推定手段11によって推定された後方車両の運転態様を所定の運転評価基準に基づき評価するものである。
The driving
運転態様推定手段11による運転態様の推定と運転態様評価手段12による運転態様の評価について具体例を挙げて説明する。いま、後方車両の車速、自車との相対距離及び自車との相対速度の3つの要素によって後方車両の運転態様を表現する。つまり、後方車両のある瞬間における運転態様は図3に示される3次元空間上の1点として表現することができる。運転態様推定手段11は、後方車両からこれら3つの要素をある周期で(例えば、1秒間隔で)RAMに取り込む。言い換えれば、取り込む瞬間毎の後方車両の運転態様が図3の空間上の点としてプロットされる。そして、所定時間(例えば、30秒)内におけるこれらの点を統計処理して、後方車両の運転態様を推定する。後方車両の車速、相対距離及び相対速度はほぼ一定ならばプロットされる点がある空間範囲に収束するので、後方車両の運転態様は安定な走行をしていると推定可能である。それに対し、プロットされる点がばらついていると、車両の運転態様は不安定な走行をしていると推定可能である。
The driving mode estimation by the driving mode estimation unit 11 and the driving mode evaluation by the driving
運転態様評価手段12は、後方車両の車速、自車との相対距離及び自車との相対速度の3つの要素に関しての運転評価基準となる規範モデルをROMに保存している。運転態様評価手段12は、運転態様推定手段11によって推定された運転態様をその規範モデルに基づき評価する。この規範モデルには、これらの3つの要素の関係について車両の走行シミュレーション等によって事前に得られた結果が反映される。例えば、図3で示されるように、規範モデルは3次元空間内の運転評価基準面として表現することができる。運転評価基準面は、後方車両の運転態様を評価する上での自車と後方車両との車間関係基準となる。
The driving mode evaluation means 12 stores in the ROM a reference model that is a driving evaluation standard regarding three elements, namely, the vehicle speed of the rear vehicle, the relative distance to the own vehicle, and the relative speed to the own vehicle. The driving
運転態様推定手段11によって推定された運転態様が運転評価基準面に対しどのような位置関係にあるかによって評価の結果が異なる。運転態様評価手段12は、推定された後方車両の運転態様が運転評価基準面よりも空間的に下の位置にある場合には運転パフォーマンスが低いと評価し、運転評価基準面よりも空間的に上の位置にある場合には運転パフォーマンスが高いと評価する。 The evaluation results differ depending on the positional relationship between the driving mode estimated by the driving mode estimation unit 11 and the driving evaluation reference plane. The driving mode evaluation means 12 evaluates that the driving performance is low when the estimated driving mode of the rear vehicle is spatially below the driving evaluation reference plane, and is spatially lower than the driving evaluation reference plane. If it is in the upper position, it is evaluated that the driving performance is high.
また、運転態様評価手段12は、推定された後方車両の運転態様が運転評価基準面に対しばらつきが大きい場合には運転パフォーマンスが低いと評価し、運転評価基準面に対しばらつきが小さい場合には運転パフォーマンスが高いと評価する。 The driving mode evaluation means 12 evaluates that the driving performance is low when the estimated driving mode of the rear vehicle has a large variation with respect to the driving evaluation reference plane, and when the variation with respect to the driving evaluation reference plane is small. Assess that driving performance is high.
ここで、運転態様評価手段12は、後方車両の運転態様を表すプロットされた点と運転評価基準面との距離(法線方向の距離)を「評価点(点数)」として運転態様を評価する指標とする。例えば、図3上において、運転評価基準面から上側にある運転態様の点はプラスの評価点であり、運転評価基準面からの下側にある運転態様の点はマイナスの評価点であり、運転評価基準面との距離が大きくなるにつれて評価点の絶対値も大きくなる。運転態様評価手段12は、所定時間内におけるN個のプロット点の評価点を積算して所定値以上になれば運転パフォーマンスが高いと評価し、所定値より小さければ運転パフォーマンスが低いと評価する。若しくは、運転態様評価手段12は、評価点に関しプロット点の散らばり度合いを表す「分散」や「標準偏差」が所定値以上になればばらつきが大きいとして運転パフォーマンスが低いと評価し、所定値より小さければばらつきが小さいとして運転パフォーマンスが高いと評価する。なお、「高い」「低い」の2段階評価ではなく、閾値を数段階設けて、評価をより細分化してもよい。 Here, the driving mode evaluation means 12 evaluates the driving mode by setting the distance (distance in the normal direction) between the plotted point representing the driving mode of the rear vehicle and the driving evaluation reference plane as the “evaluation point (score)”. Use as an indicator. For example, in FIG. 3, the point of the driving mode on the upper side from the driving evaluation reference plane is a positive evaluation point, the point of the driving mode on the lower side of the driving evaluation reference plane is a negative evaluation point, The absolute value of the evaluation point increases as the distance from the evaluation reference plane increases. The driving mode evaluation means 12 evaluates that the driving performance is high if the evaluation points of N plot points within a predetermined time are integrated and become equal to or higher than a predetermined value, and that the driving performance is low if it is lower than the predetermined value. Alternatively, the driving mode evaluation means 12 evaluates that the driving performance is low if the “dispersion” or “standard deviation” indicating the degree of dispersion of the plot points with respect to the evaluation points is greater than or equal to a predetermined value, and the driving performance is low. If the variation is small, the driving performance is evaluated as high. Note that the evaluation may be further subdivided by setting several thresholds instead of the two-step evaluation of “high” and “low”.
また、後方車両の加速度、後方車両の視覚的な情報、後方車両の運転者の状況、自車の運転者の状況、道路状況等に応じて、運転態様の点に与えられる評価点の重み付けを補正してもよい。例えば、後方車両の加速度が所定値以上、後方車両がトラック・バス等の大型車両である、後方車両がパッシングをしている、後方車両の運転者が居眠りやよそ見等の運転をしている、自車の運転者の脈拍が高い、自車の運転者が初心者である、自車が旋回中やブレーキング中である等の運転負荷が高い、自車の車速が高い、道路幅が狭い等の場合には、後方車両の運転パフォーマンスが低いと評価されやすくなるような評価点の重み付けがなされる。なお、自車の運転者の状況は、体温センサ、脳波センサ、心拍数センサ等の生体センサによって取得可能である。また、道路状況は、ナビゲーションシステムによって取得可能である。 Also, according to the acceleration of the rear vehicle, visual information of the rear vehicle, the situation of the driver of the rear vehicle, the situation of the driver of the own vehicle, the road situation, etc., the weight of the evaluation point given to the point of the driving mode is weighted It may be corrected. For example, the acceleration of the rear vehicle is a predetermined value or more, the rear vehicle is a large vehicle such as a truck or bus, the rear vehicle is passing, the driver of the rear vehicle is driving such as dozing or looking away, There is a high driving load, such as the driver's pulse is high, the driver is a beginner, the vehicle is turning or braking, the vehicle speed is high, the road width is narrow, etc. In this case, the evaluation points are weighted so as to be easily evaluated when the driving performance of the rear vehicle is low. In addition, the situation of the driver of the own vehicle can be acquired by a biological sensor such as a body temperature sensor, an electroencephalogram sensor, or a heart rate sensor. The road condition can be acquired by the navigation system.
図1に戻り、ディスプレイ・スピーカ6は、後方車両の運転パフォーマンスの評価を行ったパフォーマンス判定処理ECU4(運転態様評価手段12)からの指令を受けて、自車の運転者に報知すべき情報を知らせるものである。後方車両の運転パフォーマンスの高低がディスプレイによる視覚情報やスピーカによる音声情報によって報知される。このとき、あわせて、後方車両の速度や相対距離や色や外観形状等も報知してもよい。色や形状をあわせて報知することによって、後方を確認しにくい運転者にとって後方車両の特定がしやすくなる。つまり、運転者は複数の後方車両があっても報知の対象となっている後方車両を容易に特定できる。 Returning to FIG. 1, the display speaker 6 receives information from the performance determination processing ECU 4 (driving mode evaluating means 12) that has evaluated the driving performance of the rear vehicle and receives information to be notified to the driver of the own vehicle. It is to inform. The level of driving performance of the vehicle behind the vehicle is notified by visual information by a display or audio information by a speaker. At this time, the speed, relative distance, color, appearance shape, etc. of the rear vehicle may also be notified. By notifying the color and shape together, it becomes easier for the driver who is difficult to confirm the rear to identify the rear vehicle. That is, the driver can easily identify the rear vehicle that is the subject of notification even if there are a plurality of rear vehicles.
もちろん、運転パフォーマンスが高い後方車両の場合には、自車の運転者にとっては特に影響がないので、報知しなくてもよい。運転パフォーマンスが低い車両が後方にいる場合には、例えば音声により「後方から挙動不審な車両が接近しています。気をつけてください」と、自車の運転者に注意力を高めるよう促したり、危険回避運転をするよう促したりする。また、ステアリングホイールや座席シートに振動機構を報知手段として設け、運転パフォーマンスが低い車両が後方から接近した場合には、振動機構の振動を報知動作として、その旨を自車の運転者に知らせるようにしてもよい。 Of course, in the case of a rear vehicle having a high driving performance, there is no particular influence on the driver of the own vehicle, so there is no need to notify. When a vehicle with low driving performance is in the rear, for example, by voice, "A suspicious vehicle is approaching from behind. Please be careful." Or urge them to avoid danger. In addition, when a vehicle with low driving performance approaches from behind, a vibration mechanism is provided on the steering wheel or seat, and the vibration of the vibration mechanism is notified as a notification operation so that the driver of the vehicle is notified accordingly. It may be.
また、上述の評価点の重み付けと同様に、後方車両の加速度、後方車両の視覚的な情報、後方車両の運転者の状況、自車の運転者の状況、道路状況等に応じて、報知動作をするタイミングを補正してもよい。例えば、後方車両の加速度が所定値以上、後方車両がトラック・バス等の大型車両である、後方車両がパッシングをしている、後方車両の運転者が居眠りやよそ見等の運転をしている、自車の運転者の脈拍が高い、自車の運転者が初心者である、自車が旋回中やブレーキング中である等の運転負荷が高い、自車の車速が高い、道路幅が狭い等の場合には、報知動作するタイミングを既定値より早める。 In addition, similar to the weighting of the evaluation points described above, the notification operation is performed according to the acceleration of the rear vehicle, the visual information of the rear vehicle, the situation of the driver of the rear vehicle, the situation of the driver of the own vehicle, the road situation, etc. You may correct the timing to do. For example, the acceleration of the rear vehicle is a predetermined value or more, the rear vehicle is a large vehicle such as a truck or bus, the rear vehicle is passing, the driver of the rear vehicle is driving such as dozing or looking away, There is a high driving load, such as the driver's pulse is high, the driver is a beginner, the vehicle is turning or braking, the vehicle speed is high, the road width is narrow, etc. In this case, the notification operation timing is advanced from a predetermined value.
したがって、本発明の車両用運転支援装置によれば、後方車両の運転態様が評価されて自車の運転者への報知支援が行なわれるので、運転者に対して危険回避運転を促し追突の危険性を軽減することができる。また、自車の運転者は後方を意識していなくても若しくは後方を意識しすぎることなく適切な運転操作を行なうことができる。そして、基本的に、後方車両が挙動不審であるのか技量の低い運転であるのか否かは自車の運転者は普通の運転状況下では確認することができない。その上、自車の運転者が適切な運転操作をしなければ、そのような車両に追突されるおそれもある。したがって、運転の安全性も高まり、挙動不審な後方車両等の存在による自車の運転者の不快感も軽減される。 Therefore, according to the vehicle driving support device of the present invention, the driving mode of the vehicle behind the vehicle is evaluated, and notification support to the driver of the host vehicle is performed. Sexuality can be reduced. In addition, the driver of the own vehicle can perform an appropriate driving operation without being aware of the rear or not being aware of the rear. Basically, the driver of the own vehicle cannot confirm whether the vehicle behind the vehicle is suspicious of behavior or driving with low skill. In addition, if the driver of the vehicle does not perform an appropriate driving operation, there is a possibility that the vehicle will be bumped into such a vehicle. Therefore, driving safety is enhanced, and the driver's discomfort due to the presence of a suspicious rear vehicle or the like is also reduced.
以上、本発明の好ましい実施例について詳説したが、本発明は、上述した実施例に制限されることはなく、本発明の範囲を逸脱することなく、上述した実施例に種々の変形及び置換を加えることができる。 The preferred embodiments of the present invention have been described in detail above. However, the present invention is not limited to the above-described embodiments, and various modifications and substitutions can be made to the above-described embodiments without departing from the scope of the present invention. Can be added.
例えば、上述の内容では、パフォーマンス判定処理ECU4(運転態様評価手段12)からの指令を受けたディスプレイ・スピーカ6が、自車の運転者に後方車両の運転パフォーマンスを報知していた。その報知先を車外の所定の通報先にしてもよい。パフォーマンス判定処理ECU4からの指令を受けた無線通信装置は、警察、消防及び道路サービス業者等に、「挙動不審な車両がいる」として、これらの通報先に自動的に発信する。さらに、その無線通信装置は、ナビゲーションシステムから取得される緯度・経度や住所等の現在位置を特定可能な情報を発信する。これにより、運転パフォーマンスの低い車両を原因とする交通事故を未然に防いだり、警察等が迅速に取り締まりを行なうことができたりする。 For example, in the above-described content, the display speaker 6 that has received a command from the performance determination processing ECU 4 (driving mode evaluation unit 12) notifies the driver of the vehicle of the driving performance of the rear vehicle. The notification destination may be a predetermined notification destination outside the vehicle. The wireless communication device that has received a command from the performance determination processing ECU 4 automatically transmits to the police, the fire department, the road service provider, and the like that “there is a suspicious vehicle”, to these notification destinations. Further, the wireless communication device transmits information that can identify the current position such as latitude / longitude and address acquired from the navigation system. As a result, a traffic accident caused by a vehicle with low driving performance can be prevented in advance, or the police can quickly control the accident.
1 後方車間センサ
2 車速センサ
4 パフォーマンス判定処理ECU
6 ディスプレイ・スピーカ
10 車速演算手段
11 運転態様推定手段
12 運転態様評価手段
DESCRIPTION OF
6 Display /
Claims (4)
前記監視手段による監視情報から後方車両の運転態様を推定する運転態様推定手段と、
前記推定された運転態様を所定の運転評価基準に基づき評価する運転態様評価手段と、
前記運転態様評価手段による評価結果に応じた報知動作を自車の運転者に対して実行する報知手段とを備える車両用運転支援装置。 Monitoring means for monitoring the back of the vehicle;
Driving mode estimating means for estimating the driving mode of the rear vehicle from the monitoring information by the monitoring means;
Driving mode evaluation means for evaluating the estimated driving mode based on a predetermined driving evaluation standard;
A vehicle driving support apparatus comprising: notification means for executing a notification operation according to an evaluation result by the driving mode evaluation means to a driver of the host vehicle.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005110991A JP4655730B2 (en) | 2005-04-07 | 2005-04-07 | Vehicle driving support device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005110991A JP4655730B2 (en) | 2005-04-07 | 2005-04-07 | Vehicle driving support device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006293531A true JP2006293531A (en) | 2006-10-26 |
| JP4655730B2 JP4655730B2 (en) | 2011-03-23 |
Family
ID=37414070
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005110991A Expired - Fee Related JP4655730B2 (en) | 2005-04-07 | 2005-04-07 | Vehicle driving support device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4655730B2 (en) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008129772A (en) * | 2006-11-20 | 2008-06-05 | Denso Corp | Driving support system |
| JP2008310806A (en) * | 2007-06-12 | 2008-12-25 | Palo Alto Research Center Inc | Two-level grouping of subjects for collision warning systems |
| JP2008310804A (en) * | 2007-06-12 | 2008-12-25 | Palo Alto Research Center Inc | Use of long-range dynamics and mental state models to assess the risk of collision for early warning |
| JP2009157466A (en) * | 2007-12-25 | 2009-07-16 | Toyota Motor Corp | Nearby vehicle monitoring device |
| CN108028015A (en) * | 2015-09-18 | 2018-05-11 | 索尼公司 | Information processor, information processing method and program |
| JP2018112892A (en) * | 2017-01-11 | 2018-07-19 | スズキ株式会社 | Drive support device |
| US11267461B2 (en) | 2016-11-18 | 2022-03-08 | Mitsubishi Electric Corporation | Driving assistance apparatus and driving assistance method |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0765295A (en) * | 1993-08-26 | 1995-03-10 | Mazda Motor Corp | Latent danger detecting device for automobile |
| JP2003058994A (en) * | 2001-08-14 | 2003-02-28 | Nissan Motor Co Ltd | Device and method for predicting future status of driver |
| JP2004164315A (en) * | 2002-11-13 | 2004-06-10 | Toyota Motor Corp | Vehicle collision warning system |
| JP2005062912A (en) * | 2003-06-16 | 2005-03-10 | Fujitsu Ten Ltd | Vehicles controller |
-
2005
- 2005-04-07 JP JP2005110991A patent/JP4655730B2/en not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0765295A (en) * | 1993-08-26 | 1995-03-10 | Mazda Motor Corp | Latent danger detecting device for automobile |
| JP2003058994A (en) * | 2001-08-14 | 2003-02-28 | Nissan Motor Co Ltd | Device and method for predicting future status of driver |
| JP2004164315A (en) * | 2002-11-13 | 2004-06-10 | Toyota Motor Corp | Vehicle collision warning system |
| JP2005062912A (en) * | 2003-06-16 | 2005-03-10 | Fujitsu Ten Ltd | Vehicles controller |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008129772A (en) * | 2006-11-20 | 2008-06-05 | Denso Corp | Driving support system |
| JP2008310806A (en) * | 2007-06-12 | 2008-12-25 | Palo Alto Research Center Inc | Two-level grouping of subjects for collision warning systems |
| JP2008310804A (en) * | 2007-06-12 | 2008-12-25 | Palo Alto Research Center Inc | Use of long-range dynamics and mental state models to assess the risk of collision for early warning |
| JP2009157466A (en) * | 2007-12-25 | 2009-07-16 | Toyota Motor Corp | Nearby vehicle monitoring device |
| CN108028015A (en) * | 2015-09-18 | 2018-05-11 | 索尼公司 | Information processor, information processing method and program |
| EP3352154A4 (en) * | 2015-09-18 | 2019-08-07 | Sony Corporation | Information processing device, information processing method, and program |
| US10699569B2 (en) | 2015-09-18 | 2020-06-30 | Sony Corporation | Information processing apparatus, information processing method, and program |
| US11267461B2 (en) | 2016-11-18 | 2022-03-08 | Mitsubishi Electric Corporation | Driving assistance apparatus and driving assistance method |
| JP2018112892A (en) * | 2017-01-11 | 2018-07-19 | スズキ株式会社 | Drive support device |
| US10741082B2 (en) | 2017-01-11 | 2020-08-11 | Suzuki Motor Corporation | Driving assistance device |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4655730B2 (en) | 2011-03-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN104590250B (en) | Vehicle autonomous driving assistance system and method | |
| JP6686868B2 (en) | Vehicle driver status determination device | |
| JP5169884B2 (en) | Head-up display device | |
| JP5880740B1 (en) | Collision avoidance system and collision avoidance method | |
| JP6252576B2 (en) | Vehicle driving support device | |
| WO2017199529A1 (en) | Driving assistance device and driving assistance program | |
| JP5505869B2 (en) | In-vehicle warning device | |
| KR101938314B1 (en) | Apparatus and Method for Warning Rear Side of Vehicle with Learning of Driving Pattern | |
| KR101416368B1 (en) | Apparatus for processing vehicle accident data, relay sever for vehicle accident, and method for noticing vehicle accident | |
| JP5916512B2 (en) | In-vehicle device and determination method of in-vehicle device | |
| JP2009134704A (en) | Surrounding monitor system, safe driving support system, and vehicle | |
| KR101984520B1 (en) | Apparatus and method for preventing vehicle collision | |
| JP5880741B1 (en) | Collision avoidance system and collision avoidance method | |
| JP2010039919A (en) | Warning device | |
| JP2007072641A (en) | Dangerous vehicle detection device | |
| JP2014191632A (en) | Lane change support device | |
| JP2007320536A (en) | Parallel travelling vehicle monitoring device | |
| JP4655730B2 (en) | Vehicle driving support device | |
| JP6778941B1 (en) | Road rage detection system | |
| JP2005327177A (en) | System and device for supporting inter-vehicle collision prevention | |
| JP7043795B2 (en) | Driving support device, driving status information acquisition system, driving support method and program | |
| JP2017220217A (en) | Driving support device | |
| JP2006113781A (en) | Danger alarm system | |
| JP5172482B2 (en) | Vehicle periphery monitoring device | |
| JP2007072570A (en) | Armpit judging device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080314 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100519 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100525 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100716 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101130 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20101213 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140107 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140107 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |