JP2005239131A - Electric power steering device - Google Patents
Electric power steering device Download PDFInfo
- Publication number
- JP2005239131A JP2005239131A JP2005017714A JP2005017714A JP2005239131A JP 2005239131 A JP2005239131 A JP 2005239131A JP 2005017714 A JP2005017714 A JP 2005017714A JP 2005017714 A JP2005017714 A JP 2005017714A JP 2005239131 A JP2005239131 A JP 2005239131A
- Authority
- JP
- Japan
- Prior art keywords
- steering
- torque
- shaft
- angle
- joint
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images













Landscapes
- Steering Controls (AREA)
Abstract
Description
本発明は、電動パワーステアリング装置の改良に関し、インタミシャフト周辺に配されるジョイントなどに起因して必然的に発生するトルク変動を利用し、EPSの出力不足を補うようにしたものに関する。 The present invention relates to an improvement in an electric power steering apparatus, and relates to an apparatus that compensates for an insufficient output of an EPS by utilizing a torque fluctuation that is inevitably generated due to a joint arranged around an intermediate shaft.
車両の舵取り装置は、例えば非特許文献1などに開示されている。同文献1の図11では、ハンドル51の操作をステアリングシャフト52からステアリングギア部53に伝え、ピップマンアーム54を介してタイロッド55を往復動させることにより、キングピン56の回りでステアリングアーム57を回転させて、車輪58の方向を変化させるようになっている。
A vehicle steering device is disclosed in
また、この舵取り装置を電動パワーステアリング装置に搭載する場合、ステアリングシャフト52とステアリングギア部53のピニオン軸は、レイアウト上の観点から異なる位置に配され、インタミシャフトを介して連結される。その場合、両軸の軸長や取付角度も異なるため、インタミシャフトの両端には、ユニバーサルジョイント(カルダンジョイント)が取り付けられ、ステアリングシャフト52からステアリングギア部53に至るステアリング系を機械的に連結させるようになっている。
When this steering device is mounted on an electric power steering device, the
この場合、ハンドル51の操作によって、タイロッド55の往復動により、ステアリングアーム57をキングピン56の回りで回転させて車輪58の方向を変化させる。そのため、ハンドル51の切れ角が最大付近になると、どうしても車輪58の方向変化に要する力が大きくなる。すなわち、この付近では、タイロッド55からの出力をステアリングアーム57の回転軌跡の接線方向に効率よく働かせることができないため、操舵に要する力が大きくなってしまう。
In this case, by operating the
ところで、EPS、例えばコラム型EPSでは、ステアリングシャフトのアシストトルクは、インタミシャフトを介してステアリングギア部に伝達される。その際、インタミシャフトとして、カルダンジョイントなどのユニバーサルジョイントを採用することが多い。このユニバーサルジョイントは、駆動軸に接続されたヨークと、従動軸に接続されたヨークを十字軸によって回転自在に接続し、駆動軸の回転を従動軸に等しく伝達するように構成される。 By the way, in EPS, for example, column type EPS, the assist torque of a steering shaft is transmitted to a steering gear part via an intermediate shaft. At that time, a universal joint such as a cardan joint is often used as the intermediate shaft. The universal joint is configured to rotatably connect a yoke connected to the drive shaft and a yoke connected to the driven shaft by a cross shaft and transmit the rotation of the drive shaft equally to the driven shaft.
ところが、インタミシャフトに、1つのユニバーサルジョイントを用いた場合、駆動軸の回転運動と従動軸の回転運動の間で構造的な相対変位、すなわち回転運動の非同一性が生じる。その結果、ハンドルの操作角度と車輪の操舵角度が異なってしまい、車輪の正確な操舵が困難になるという問題があった。 However, when one universal joint is used for the intermediate shaft, a structural relative displacement, that is, non-identity of the rotational motion occurs between the rotational motion of the drive shaft and the rotational motion of the driven shaft. As a result, there has been a problem that the steering angle of the steering wheel and the steering angle of the wheel are different, and accurate steering of the wheel becomes difficult.
そのため、インタミシャフトの両端に、一対のユニバーサルジョイントを用いた場合、図12(a)および(b)に示すように、W字状或いはZ字状に配置すれば、駆動軸側のジョイント角α1と、従動軸側のジョイント角α2とが等しくなり、駆動軸の回転運動と被駆動軸の回転運動が実質的に同一となるため、正確な操舵精度を得ることができる。 Therefore, when a pair of universal joints are used at both ends of the intermediate shaft, as shown in FIGS. 12 (a) and 12 (b), the joint angle α1 on the drive shaft side can be obtained by arranging in a W shape or a Z shape. Since the joint angle α2 on the driven shaft side becomes equal and the rotational motion of the drive shaft and the rotational motion of the driven shaft are substantially the same, accurate steering accuracy can be obtained.
ここで、駆動軸側(この場合、ステアリングシャフト側)のジョイント角α1は、駆動軸の中心軸とインタミシャフトの中心軸との間の角度であり、被駆動軸側(この場合、ステアリングギア部側)のジョイント角α2は、インタミシャフトの中心軸と従動軸の中心軸との間の角度である。
ところが、ハンドルの操作角に対し角速度比(伝達トルク比の逆数)を一定にすることは、理論的には可能であり、極力伝達トルク比の変動を小さくするようにジョイントの位相配置を選択することになるが、現実のステアリング装置では、伝達トルク比の変動をゼロにすることは困難であった。 However, it is theoretically possible to make the angular velocity ratio (reciprocal of the transmission torque ratio) constant with respect to the operation angle of the steering wheel, and the phase arrangement of the joints is selected so as to minimize the fluctuation of the transmission torque ratio. However, in an actual steering device, it is difficult to make the fluctuation of the transmission torque ratio zero.
つまり、ステアリングシャフトとステアリングギア部との配置関係は、通常、レイアウト上などの車体構造的な理由から、ステアリングシャフト側のジョイント角α1とステアリングギア部側のジョイント角α2とが異なった状態で配置される。 That is, the arrangement relationship between the steering shaft and the steering gear portion is usually arranged in a state where the joint angle α1 on the steering shaft side and the joint angle α2 on the steering gear portion side are different from each other for reasons of vehicle structure such as layout. Is done.
なお、ユニバーサルジョイントは、回り対偶の軸心が一点を通る球面運動連鎖であり、各ユニバーサルジョイントでは、ステアリングシャフト側の回転角速度ω1とステアリングギア部側の回転角速度ω2との角速度比(ω1/ω2)は、cosα/(1−sin2θ・sin2α)である。 The universal joint is a spherical motion chain in which the axis of the turning pair passes through one point. In each universal joint, the angular velocity ratio (ω1 / ω2) between the rotational angular velocity ω1 on the steering shaft side and the rotational angular velocity ω2 on the steering gear portion side. ) Is cos α / (1-sin 2 θ · sin 2 α).
その結果、ステアリングシャフト側の回転運動と、ステアリングギア部側の回転運動との間に、相対的な変位、すなわち回転運動に非同一性が生じ、ハンドルの操作角と車輪の操舵角とが異なってしまい、インタミシャフト回りのトルク伝達に非同一性が発生して操舵トルクに変動が生じ(図13参照)、正確な操舵を行うことが困難であった。 As a result, there is a relative displacement between the rotational motion on the steering shaft side and the rotational motion on the steering gear side, that is, non-identity in the rotational motion, and the steering wheel angle and the wheel steering angle are different. As a result, non-identity occurs in torque transmission around the intermediate shaft and fluctuations occur in the steering torque (see FIG. 13), making it difficult to perform accurate steering.
また、操舵トルクは、ハンドルの最大切れ角付近で最も大きくなるが、操舵トルクの変動が、最大切れ角付近で正側領域(図13のB領域)の位相、すなわち必要な操舵トルクを増加させなければならないような位相にあると、アシスト力がより一層不足するという弊害を生じ、ハンドル操作が重すぎる感覚を与えることになる。特にコラム型EPSの場合、寸法的制約のためにモータでのアシスト力が大きくできず、操舵力不足という弊害がより顕著になる。ここで、最大切れ角とは、ハンドルを回転させて転舵した時に、ラック軸がストッパーに当接し回転しなくなる最大の操舵角をいい、通常、片側に1.5回転で約540度程度である。 Further, the steering torque becomes the maximum near the maximum steering angle of the steering wheel, but the fluctuation of the steering torque increases the phase of the positive side region (B region in FIG. 13), that is, the necessary steering torque near the maximum steering angle. If it is in a phase where it must be, an adverse effect that the assist force is further insufficient is caused, giving a sense that the steering wheel operation is too heavy. In particular, in the case of a column type EPS, the assist force at the motor cannot be increased due to dimensional constraints, and the adverse effect of insufficient steering force becomes more prominent. Here, the maximum turning angle refers to the maximum steering angle at which the rack shaft abuts against the stopper and does not rotate when the steering wheel is turned, and is normally about 540 degrees with 1.5 rotations on one side. is there.
また、アシスト力不足を回避するため、予備のアシスト用モータを備え、最大切れ角付近のためにだけ、予備のモータを使用するのも、コスト的に無駄で、モータの慣性による操舵応答性も低下し、本質的な解決策ではない。 In order to avoid shortage of assist force, a spare assist motor is provided, and the spare motor is used only for the vicinity of the maximum turning angle, which is wasteful in cost and steering response due to the inertia of the motor. It ’s not an essential solution.
ちなみに、ハンドルの最大切れ角付近で、アシスト力の不足を補うために、例えば特許文献2では、図14に示すように、特殊なVGR(Variable Gear Ratio)ギアを用いた構成、すなわちステアリングギア部のピニオン歯71とラック歯72の噛合部に、ラック歯72の中央Cから端部に向かって圧力角を減少させるような構成(圧力角α1から圧力角α2に減少する構成)になっている。これにより、最大切れ角付近の操舵力を緩和し、ハンドルの操作範囲の全域に亘って一定の操舵力が得られるようにしたものが開示されている。
Incidentally, in order to compensate for the lack of assist force near the maximum turning angle of the steering wheel, for example, in
ところが、上記VGRを使用したものでは、ラック歯72の圧力角が一定でないため、ピニオン歯71との噛合部における強度上の問題や、歯同士の衝突に起因する騒音などの新たな問題を発生する恐れがあった。
However, in the case where the VGR is used, the pressure angle of the
そこで、本発明の目的は、ステアリング系を構成するインタミシャフトなどのジョイント構造を改良することにより、ステアリング系に発生するトルク変動を利用して、ハンドル操作時に最も操舵力を必要とする最大切れ角付近で、トルク変動を操舵トルクを減らす側の位相領域になるようにし、大きな容量のモータを用いる必要性をなくし、低コストで、操舵性に優れた装置を提供することにある。 Accordingly, an object of the present invention is to improve the joint structure such as an intermediate shaft that constitutes the steering system, and to utilize the torque fluctuation generated in the steering system, thereby making the maximum turning angle that requires the most steering force during steering operation. An object of the present invention is to provide a device that is low in cost and excellent in steering performance, by making the torque fluctuation close to the phase region on the side where the steering torque is reduced, eliminating the need to use a motor with a large capacity.
本発明の上記目的は、ステアリングシャフトからインタミシャフトを介してステアリングギア部に至るステアリング系をジョイントによって連結し、前記ジョイントに起因してトルク変動が生じるステアリング装置において、トルク変動の伝達トルク比(ステアリングシャフト側の操舵トルク/ステアリングギア部側の伝達トルク)が1.0以下となる領域に、ハンドルの最大切れ角位置を設定したことにより、達成される。 An object of the present invention is to provide a torque fluctuation transmission torque ratio (steering) in a steering device in which a steering system from a steering shaft to an steering shaft via an intermediate shaft is connected by a joint and torque fluctuation occurs due to the joint. This is achieved by setting the maximum turning angle position of the steering wheel in a region where the steering torque on the shaft side / transmission torque on the steering gear portion side is 1.0 or less.
また、前記目的は、前記最大切れ角の位置を、前記トルク変動でステアリングシャフト側の操舵トルクよりステアリングギア部側の伝達トルクを増やす側の位相領域に設定し、前記最大切れ角付近で、操舵角に対して、前記伝達トルク比の変動が減少する過程の領域になるようにしたことにより、効果的に達成される。 Further, the object is to set the position of the maximum turning angle in a phase region on the side where the transmission torque on the steering gear side is increased from the steering torque on the steering shaft side by the torque fluctuation, and the steering is performed near the maximum turning angle. This is effectively achieved by making it an area of a process in which the fluctuation of the transmission torque ratio decreases with respect to the angle.
以上のように、本発明に係る電動パワーステアリング装置によると、インタミシャフトの両端に配されたカルダンジョイントなどのユニバーサルジョイントの取り付け構造を改良し、トルク変動の伝達トルク比(ステアリングシャフト側の操舵トルク/ステアリングギア部側の伝達トルク)が1.0以下となる領域に、ハンドルの最大切れ角位置を設定した。これにより、ユニバーサルジョイントに起因して生ずるトルク変動を操舵トルクの低減に利用できる。さらに、ハンドル操作時に最も操舵トルクを必要とする最大切れ角付近の位置をユニバーサルジョイントに起因するトルク変動で操舵トルクを減らす側の位相領域にあるようにし、さらに操舵角に対して、前記伝達トルク比の変動が減少する過程の領域になるようにすることにより、アシストモータの出力が限界であっても操舵トルクの変化は減る方向であるため、ハンドル操作に違和感がなくなる。その結果、複数のジョイントで連結されたコラムに必然的に発生するトルク変動を有効に利用し、最大切れ角付近で、EPSによるアシスト力の不足状態を緩和することができ、操舵性、特に操舵応答性も良好に維持することができる。また、最大切れ角付近で、出力不足を緩和するために、別途VGRギアなど、付加的な部材を用いる必要がなく、装置全体のコストダウン化を図ることができる。 As described above, according to the electric power steering apparatus according to the present invention, the mounting structure of the universal joint such as the cardan joint disposed at both ends of the intermediate shaft is improved, and the torque variation transmission torque ratio (the steering torque on the steering shaft side) is improved. The steering wheel maximum turning angle position is set in a region where the transmission torque on the steering gear portion side is 1.0 or less. Thereby, the torque fluctuation caused by the universal joint can be used to reduce the steering torque. Further, the position near the maximum turning angle that requires the most steering torque when operating the steering wheel is in a phase region on the side where the steering torque is reduced by torque fluctuation caused by the universal joint, and further, the transmission torque with respect to the steering angle. By making the ratio change range, the steering torque changes in a direction that decreases even when the output of the assist motor is at the limit. As a result, torque fluctuations inevitably generated in columns connected by a plurality of joints can be effectively used, and an insufficient assist force due to EPS can be alleviated near the maximum turning angle. Responsiveness can also be maintained well. Further, in order to alleviate the shortage of output near the maximum turning angle, there is no need to use an additional member such as a separate VGR gear, and the cost of the entire apparatus can be reduced.
以下、図面を参照しながら、本発明の実施形態を説明する。 Hereinafter, embodiments of the present invention will be described with reference to the drawings.
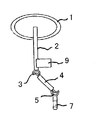
図1は、本発明に係る電動パワーステアリング装置の概略構成を示し、同図において、ハンドル1から、ステアリングコラム2、ユニバーサルジョイント3、インタミシャフト4、ユニバーサルジョイント5、およびステアリングギア部6に連結されている。このステアリングギア部6は、ピニオン軸7とラック軸8とから構成され、ピニオン軸7の回転をラック軸8の水平運動に変換させるようになっている。
FIG. 1 shows a schematic configuration of an electric power steering device according to the present invention. In FIG. 1, a
また、ステアリングコラム2には、モータ9の駆動力を減速するための減速ギア10が設けられ、モータ9の回転力を減速してステアリングコラム2内のステアリングシャフトに伝達させるようになっている。また、減速ギア10のハンドル1側には、トルクセンサ11が配されていて、該トルクセンサ11からのトルク信号は、車速センサ12からの車速信号とともに、コントロールユニット(ECU)13に送られるようになっている。また、コントロールユニット13には、供給電源としてのバッテリー14にイグニッションスイッチ15を介して接続されている。なお、16はヒューズである。
The
また、ラック軸8の両端には、それぞれボールジョイント17を介してタイロッド18が配され、該タイロッド18の往復動に応じて、キングピン19を軸としてステアリングアーム20が回転自在に設けられていて、車輪21の方向変化を行うようになっている。よって、ハンドル1を図1矢印方向に操作すると、車輪21は同図矢印方向に回動する。
In addition,
そして、ハンドル1を操作すると、図2に示すように、タイロッド18は、同図矢印方向に移動し(実線位置から二点鎖線位置まで)、キングピン19を軸としてステアリングアーム20が回転し、車輪21が同図のθ1だけ傾斜する。よって、車輪21が図2の実線位置にある場合、車輪21には、タイロッド18からの操舵力Tが有効に作用するのに対し、ステアリングアーム20の回転によって車輪21が図2の二点鎖線位置になると、車輪21には、タイロッド18からの操舵力Tのうち傾斜角θ1に比例する分力だけが作用することになる。一方、図3に示すように、ハンドル1を逆方向に操作すると、タイロッド18は、同図矢印方向に移動し(実線位置から二点鎖線位置まで)、キングピン19を軸としてステアリングアーム20が回転し、車輪21が同図のθ2だけ傾斜する。よって、車輪21が図3の実線位置にある場合、車輪21には、タイロッド18からの操舵力Tが有効に作用するのに対し、ステアリングアーム20の回転によって車輪21が図3の二点鎖線位置になると、車輪21には、タイロッド18からの操舵力Tのうち、傾斜角θ2に比例する分力だけが作用することになる。以上のように、ハンドル1の切れ角が最大になる場合に、操舵に要する力が最も大きくなる。
When the
また、前記インタミシャフト4は、ステアリングコラム2とピニオン軸7との間に配され、その両端のユニバーサルジョイント3,5を介してハンドル1側の回転をピニオン軸7側の回転に伝達させるようになっている。
The
ここで、ユニバーサルジョイント3,5は、それぞれ球面運動連鎖になり、駆動軸側の回転角をθとし、駆動軸と従動軸のなす角をαとすれば、角速度比は、cosα/(1−sin2θsin2α)になる。
Here, the
また、ユニバーサルジョイント3,5は、インタミシャフト4の両端に配され、ハンドル1の中立(直進)時に、図4のように配置される場合、ハンドル1の操作角に対して、操舵力は、中立(直進)時を基準として直線的に増大し、トルクは、図5に示すように、周期的に変動する。
Further, when the
また、任意のジョイント角で連結されたステアリング装置では、ジョイント部での入力軸と出力軸との角速度比が、操舵角(ハンドル1の回転角)に対して変動する。その際、入力軸と出力軸の角速度比(ωa/ωd)と、伝達トルク比(Ta/Td)とは、Ta・ωa=Td・ωd、すなわちTa/Td=ωd/ωaの関係にある。よって、図6に示すように、角速度比がハンドル1の回転角に対して変動するとき、伝達トルク比は、ハンドル1の回転角に対して逆比例の関係で変動する。
Further, in the steering device connected at an arbitrary joint angle, the angular velocity ratio between the input shaft and the output shaft at the joint portion varies with respect to the steering angle (the rotation angle of the steering wheel 1). At this time, the angular velocity ratio (ωa / ωd) between the input shaft and the output shaft and the transmission torque ratio (Ta / Td) are in a relationship of Ta · ωa = Td · ωd, that is, Ta / Td = ωd / ωa. Therefore, as shown in FIG. 6, when the angular velocity ratio varies with the rotation angle of the
また、例えばラック&ピニオンなどのステアリングギア部を備えたステアリングシステムでは、図7に示すように、操舵角が大きくなるに従って、ステアリングギア部での出力が大きくなる。 Further, in a steering system including a steering gear section such as a rack and pinion, for example, as shown in FIG. 7, the output at the steering gear section increases as the steering angle increases.
そして、操舵力(操舵トルク)は、操舵角に応じて、ラックを作動するのに要するトルク変動値と、ジョイント部でのトルク変動値とを重ね合わせた値になり、操舵角が最大切れ角付近になると、必要な操舵力が最も大きくなる。そのため、本実施例では、トルク変動の伝達トルク比、すなわちステアリングシャフト側の操舵トルク(Ta)/ステアリングギア部側の伝達トルク(Td)を、図8に示すように、1.0以下となる領域にハンドルの最大切れ角を設定するようになっている。すなわち、トルク変動において、最大切れ角付近は、出力トルク(伝達トルク)を増やす側のトルク変動領域に設定される。その結果、操舵力は、トルク変動において最大切れ角付近で出力トルクを増大する側に変動し、その分アシスト力を補償することになる。 The steering force (steering torque) is a value obtained by superimposing the torque fluctuation value required to operate the rack in accordance with the steering angle and the torque fluctuation value at the joint portion. When it is near, the required steering force is the largest. Therefore, in this embodiment, the torque fluctuation transmission torque ratio, that is, the steering torque (Ta) on the steering shaft side / the transmission torque (Td) on the steering gear portion side is 1.0 or less as shown in FIG. The maximum cutting angle of the handle is set in the area. That is, in the torque fluctuation, the vicinity of the maximum turning angle is set to the torque fluctuation area on the side where the output torque (transmission torque) is increased. As a result, the steering force fluctuates to increase the output torque near the maximum turning angle in the torque fluctuation, and the assist force is compensated accordingly.
従って、上記実施例では、いずれか一方の側にハンドル1を切ると、操舵力は、図8に示すように、操舵角に対して周期的なトルク変動曲線を呈する。その際、トルク変動曲線の位相は、ジョイント部の向きによって任意に調整できる。例えば、ユニバーサルジョイント3,5を図9のような配置にすると、図8の一点鎖線で示す変動曲線を描き、図10のような配置にすると、図8のニ点鎖線で示す変動曲線を描く。つまり、ユニバーサルジョイント3,5を図9のような配置にすれば、ハンドル1の最大切れ角付近を、操舵トルクを増やす側の位相領域になるように設定することができる。特に、最大切れ角の位置を、図8の一点鎖線のうち負の傾きである太線部(D部)に設定すれば、アシスト力の補償が増大し、トルク変動をより効果的に利用することができる。その結果、アシスト力不足をより一層軽減することができ、モータ容量の増大を抑え、予備のモータを設けたり、VGRなどの付加的な部材を用いる必要がなく、低コストで、操舵性、特に操舵応答性を良好に維持することができる。
Therefore, in the above embodiment, when the
以上のように、上記実施例では、ハンドル1の最大切れ角付近で、トルク変動曲線が操舵トルクを減少させるような位相領域になるように、ユニバーサルジョイント3,5を組み付け、トルク変動の伝達トルク比が、1.0以下となる領域に、ハンドル1の最大切れ角を設定した。また、最大切れ角の位置は、トルク変動曲線で、図8に示すように、操舵トルクを減らす側の領域であって、伝達トルク比の変動が、減少する過程の領域になるように設定した。これにより、ハンドル1の操作に大きな操舵力を要する最大切れ角付近で、ユニバーサルジョイント3,5などに起因するステアリング系のトルク変動を有効に利用することができる。すなわち、最大切れ角付近で、トルク変動がEPSの出力を増やす側の位相に設定したので、トルク変動のうちアシスト力の余裕側位相を有効に活用し、最大切れ角付近で、アシスト力の不足を補うようにした。よって、VGRなどの付加的な部材や大容量のモータなどを設ける必要がなく、装置のコストダウン化を図ることができ、また、モータの慣性を効率的に抑えることができ、操舵性や追従性を損なうことなく、操舵安定性が良好になる。
As described above, in the above embodiment, the
なお、CGR(Constant Gear Ratio)の場合、最大切れ角の位置で、角速度が最小になるように設定すれば、操舵力と相殺されて、CGRでありながら、いわゆるVGRと同様の効果を得ることも可能である。また、直進付近(ハンドルの中立付近)にもトルク変動が生じるが、操舵に要する力が小さく、アシストモータの容量に余裕のある領域であるため、EPSの制御によって滑らかな回転角−トルク曲線を得ることができる。 In the case of CGR (Constant Gear Ratio), if the angular velocity is set to be minimum at the position of the maximum turning angle, the same effect as so-called VGR can be obtained even though CGR is offset by the steering force. Is also possible. Also, torque fluctuations occur near the straight line (near the steering wheel neutral), but the force required for steering is small and the capacity of the assist motor is sufficient. Therefore, a smooth rotation angle-torque curve is obtained by controlling EPS. Can be obtained.
1 ハンドル
3 ユニバーサルジョイント
4 インタミシャフト
5 ユニバーサルジョイント
7 ピニオンシャフト
8 ラック軸
9 モータ
10 減速ギア
13 コントロールユニット
18 タイロッド
20 ステアリングアーム
21 車輪
DESCRIPTION OF
Claims (2)
前記トルク変動における伝達トルク比(ステアリングシャフト側の操舵トルク/ステアリングギア部側の伝達トルク)が1.0以下となる領域に、ハンドルの最大切れ角位置を設定したことを特徴とする電動パワーステアリング装置。 In a steering device in which a steering system from a steering shaft through an intermediate shaft to a steering gear portion is connected by a joint, and torque fluctuation occurs due to the joint.
Electric power steering characterized in that the maximum turning angle position of the steering wheel is set in a region where the transmission torque ratio (steering torque on the steering shaft side / transmission torque on the steering gear portion side) in the torque fluctuation is 1.0 or less. apparatus.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005017714A JP2005239131A (en) | 2004-01-26 | 2005-01-26 | Electric power steering device |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004017020 | 2004-01-26 | ||
| JP2005017714A JP2005239131A (en) | 2004-01-26 | 2005-01-26 | Electric power steering device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005239131A true JP2005239131A (en) | 2005-09-08 |
| JP2005239131A5 JP2005239131A5 (en) | 2008-02-14 |
Family
ID=35021307
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005017714A Pending JP2005239131A (en) | 2004-01-26 | 2005-01-26 | Electric power steering device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005239131A (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010184627A (en) * | 2009-02-13 | 2010-08-26 | Nsk Ltd | Electric power steering device |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5753965U (en) * | 1980-09-16 | 1982-03-29 | ||
| JPH06270819A (en) * | 1993-01-22 | 1994-09-27 | Toyota Motor Corp | Assembling method for steering shaft and steering mechanism |
| JPH11157461A (en) * | 1997-11-28 | 1999-06-15 | Toyota Motor Corp | Steering unit for vehicle |
| JP2003072574A (en) * | 2001-08-31 | 2003-03-12 | Toyota Motor Corp | Motor-driven power steering device |
| JP2003320947A (en) * | 2002-05-07 | 2003-11-11 | Atex Co Ltd | Steering apparatus for vehicle |
| JP2003327136A (en) * | 2002-05-15 | 2003-11-19 | Toyoda Mach Works Ltd | Steering gear for vehicle |
-
2005
- 2005-01-26 JP JP2005017714A patent/JP2005239131A/en active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5753965U (en) * | 1980-09-16 | 1982-03-29 | ||
| JPH06270819A (en) * | 1993-01-22 | 1994-09-27 | Toyota Motor Corp | Assembling method for steering shaft and steering mechanism |
| JPH11157461A (en) * | 1997-11-28 | 1999-06-15 | Toyota Motor Corp | Steering unit for vehicle |
| JP2003072574A (en) * | 2001-08-31 | 2003-03-12 | Toyota Motor Corp | Motor-driven power steering device |
| JP2003320947A (en) * | 2002-05-07 | 2003-11-11 | Atex Co Ltd | Steering apparatus for vehicle |
| JP2003327136A (en) * | 2002-05-15 | 2003-11-19 | Toyoda Mach Works Ltd | Steering gear for vehicle |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010184627A (en) * | 2009-02-13 | 2010-08-26 | Nsk Ltd | Electric power steering device |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8272473B2 (en) | Active steering control system | |
| US6742621B2 (en) | Electric power steering device and control method thereof | |
| US20130066521A1 (en) | Control unit for vehicle steering system | |
| JP2005041283A (en) | Steering control device | |
| US11780491B2 (en) | Electric recirculating ball power steering system | |
| US20030164260A1 (en) | Steering actuator system | |
| JP3014588B2 (en) | Variable steering angle ratio steering device for vehicles | |
| JP2008195188A (en) | Steering device for vehicle | |
| US20200377147A1 (en) | Steering device | |
| JP4432596B2 (en) | Rack and pinion steering system | |
| JP6493906B2 (en) | Power steering device | |
| JP4434261B2 (en) | Steering device | |
| JP2009029225A (en) | Steering device | |
| JP2005239131A (en) | Electric power steering device | |
| JPS61146682A (en) | Front and rear wheel steering device for car | |
| JP5975242B2 (en) | Steering angle ratio variable steering device | |
| JP5491930B2 (en) | Vehicle power steering device | |
| US20050061576A1 (en) | Variable gear-ratio mechanism and steering control system using same | |
| JP4114560B2 (en) | Electric power steering device | |
| JP4352325B2 (en) | Electric power steering device | |
| JP2007203905A (en) | Suspension system | |
| JP3646201B2 (en) | Vehicle steering system | |
| WO2020116087A1 (en) | Power transmitting device and electric power steering device with same | |
| JP2016043796A (en) | Electric power steering device | |
| JP2005205998A (en) | Electric power steering system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Effective date: 20050711 Free format text: JAPANESE INTERMEDIATE CODE: A711 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071225 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20071225 |
|
| A977 | Report on retrieval |
Effective date: 20100121 Free format text: JAPANESE INTERMEDIATE CODE: A971007 |
|
| A131 | Notification of reasons for refusal |
Effective date: 20100202 Free format text: JAPANESE INTERMEDIATE CODE: A131 |
|
| A02 | Decision of refusal |
Effective date: 20100601 Free format text: JAPANESE INTERMEDIATE CODE: A02 |