JP2005234800A - 用例機械翻訳装置及び用例翻訳コンピュータプログラム、並びに用例検索装置及び用例検索コンピュータプログラム - Google Patents
用例機械翻訳装置及び用例翻訳コンピュータプログラム、並びに用例検索装置及び用例検索コンピュータプログラム Download PDFInfo
- Publication number
- JP2005234800A JP2005234800A JP2004041751A JP2004041751A JP2005234800A JP 2005234800 A JP2005234800 A JP 2005234800A JP 2004041751 A JP2004041751 A JP 2004041751A JP 2004041751 A JP2004041751 A JP 2004041751A JP 2005234800 A JP2005234800 A JP 2005234800A
- Authority
- JP
- Japan
- Prior art keywords
- search
- distance
- word
- language
- word string
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000013519 translation Methods 0.000 title claims abstract description 142
- 238000004590 computer program Methods 0.000 title claims description 17
- 230000006870 function Effects 0.000 claims abstract description 24
- 238000004422 calculation algorithm Methods 0.000 claims abstract description 12
- 238000004364 calculation method Methods 0.000 claims abstract description 8
- 230000014616 translation Effects 0.000 claims description 139
- 230000004044 response Effects 0.000 claims description 8
- 238000000034 method Methods 0.000 description 43
- 230000008569 process Effects 0.000 description 27
- 238000012545 processing Methods 0.000 description 12
- 238000000605 extraction Methods 0.000 description 9
- 238000013461 design Methods 0.000 description 8
- 238000003780 insertion Methods 0.000 description 4
- 230000037431 insertion Effects 0.000 description 4
- 230000015654 memory Effects 0.000 description 4
- 238000012217 deletion Methods 0.000 description 3
- 230000037430 deletion Effects 0.000 description 3
- 238000011156 evaluation Methods 0.000 description 3
- 230000014509 gene expression Effects 0.000 description 3
- 238000010845 search algorithm Methods 0.000 description 3
- 238000010586 diagram Methods 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 238000006467 substitution reaction Methods 0.000 description 2
- 230000007704 transition Effects 0.000 description 2
- 230000001174 ascending effect Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000018109 developmental process Effects 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 230000011218 segmentation Effects 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 238000012795 verification Methods 0.000 description 1
Images






Landscapes
- Machine Translation (AREA)
Abstract
【解決手段】用例機械翻訳装置で用いられる用例検索装置は、各用例に含まれる第1の言語の単語列に含まれる内容語数及び機能語数に基づいて複数のグループに分割されたコーパスから、第1の言語の入力文に最も近い用例を検索するために、各グループに含まれる第1の言語の単語列と入力文との間で可能な最小の単語列編集距離を算出する最小距離算出部120と、距離の下限値がしきい値以下のものを選択するグループ選択部122と、選択されたグループに含まれる用例の中で、単語列編集距離により定義される入力文との距離が最小の解を探索する探索部124−140とを含む。探索にはA*アルゴリズムを使用しても良い。
【選択図】 図4
Description
図1に、本発明の一実施の形態に係る用例に基づく用例機械翻訳装置30のブロック図を示す。図1を参照して、この用例機械翻訳装置30は、言語資源としてコンピュータ読取可能な対訳コーパス42、第1の言語のシソーラス44、第2の言語のシソーラス45及び対訳辞書50を含む。これらはいずれもハードディスク等の記憶装置に格納される。
ここでLinputは入力文の単語数、Lexampleは用例原言語文の単語数、Iは用例原言語文を入力文に変換するために必要な挿入単語数、Dは同じく必要な削除単語数、SEMDISTは同じく必要な置換により置換される語の間の意味距離を示す。
(2‐j)デザイン/が/気/に/入り/ません
ここで、「色」と「デザイン」とがシソーラス44上で完全に異なった語であるものとすると、単語間の意味距離は1となる。従ってこの2文間の単語列編集距離は(0+0+2*1)/(6+6)=0.167となる。
(2‐e)I do not like the design.
このフェーズでは目的言語文(2‐e)中で「デザイン」に対応する箇所が探し出され、「デザイン」と「design」との間の対応が取られる。この結果、以下に示すような原言語パターン(2‐j‐p)と目的言語パターン(2‐e‐p)とからなる翻訳パターンが作られる。入力文によるその変数束縛は(1‐j‐b)となる。
(2‐e‐p)I do not like the X.
(1‐j‐b)X=「色」
翻訳パターン選択部52は、用例検索部46により複数の用例が検索され、その結果翻訳パターン抽出部48によって複数の翻訳パターンが抽出された際に、その中の一つを選択するための処理を行なうものである。翻訳パターン選択部52は、複数の翻訳パターンから一つを選択するために、(1)より多くの用例検索結果から同じ翻訳パターンが抽出された方を選ぶ、(2)翻訳パターン中に現れる単語のコーパスでの出現頻度の合計が大きい方を選ぶ、というヒューリスティクスを使用して翻訳パターンを選択する。これらで一つの翻訳パターンを決定できない場合には、翻訳パターン選択部52は任意の一つの翻訳パターンを選ぶ。
(1‐e)I do not like the color.
−用例検索部46の詳細−
図1に示す用例機械翻訳装置30の各処理の中で翻訳実行時間の大きな割合を占めるのは、用例検索部46による用例検索である。用例の選択基準には、前述した単語列編集距離が使われる。
図2を参照して、対訳コーパス42に含まれる候補文を、その内容語数と機能語数とを元に複数(M個)のグループ70−1、70−2、…70―Mにグループ分けする。このようにグループ分けすることにより、入力文の内容語数と機能語数及び距離しきい値を用いて検索対象の候補文数を絞ることができる。具体的には以下のように用例検索を行なう。
内容語数と機能語数とを基準に分けられたグループ70−1,70−2,…,70―Mの各々に対し、複数の候補文を一つの単語グラフ72―1,72−2,…,72−Mにまとめる。すなわち一つのグループごとに一つの単語グラフが作成される。図3に単語グラフの例を示す。
二つの単語列を照合した結果を示す単語の一致、置換、挿入、削除の列を「照合列」と呼ぶこととする。グループ内において単語列編集距離を最小とする候補文又は解を検索することは、単語グラフの先頭ノードから最終ノードまでの可能な全経路について、各経路に現れる単語列と入力単語列との照合列の中から単語列編集距離を最小にするものを探索することである。本実施の形態では、この探索問題の解放にA*アルゴリズムを用いている。
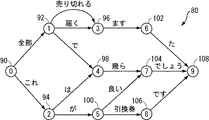
ここでは、ある単語グラフを用いた、単語列編集距離最小の経路を探索する処理について説明する。図3に示すように、ある単語グラフはノードとリンクとを含む。リンクは単語をラベルとして持ち、一つの始点ノードと一つの終点ノードとを結ぶ。例えば図3に示す「売り切れる」というリンクはノード92と96とを結んでいる。単語グラフ全体で一つの先頭ノードと一つの最終ノードとを持つ。図3ではこれらはノード90及び108に相当する。
状態はpaths,node,input,transという属性を持つ。各属性の内容は以下の通りである。
・paths:その時点までの照合列のリスト
・node:単語グラフのノード。このノードまで照合が進んだことを示す。
・input:入力単語列のうち、まだ照合に使われていない部分
・trans:適用可能な作用素。
5種類の作用素、T作用素、E作用素、S作用素、I作用素及びD作用素を以下のように定義する。T作用素とI作用素は状態に適用されるが、E、S、Dの各作用素は状態、及びその状態のnodeを始点とするリンクの組に適用される。T作用素は実際に照合を進める作用素ではなく、trans属性とともにE、S、I、Dの各作用素の適用順序を制御する役目を持つ。なお以下の説明では、作用素が適用される状態をs、リンクをl、生成される継続状態をs´と表し、各作用素について適用条件とどのような継続状態が生成されるかを示す。
−条件:s.transがE作用素又はS作用素である。
−条件:s.transがE作用素である。
s´.node=lの終点
s´.input=s.inputから先頭を消去した値
s´.trans=E作用素とS作用素とNILとから選択(説明は後述)
・S作用素:
−条件:s.transがS作用素である。
s´.node=lの終点
s´.input=s.inputから先頭を消去した値
s´.trans=E作用素とS作用素とNILとから選択
・I作用素:
−条件:s.transがNILである。
s´.node=s.node
s´.input=s.inputから先頭を消去した値
s´.trans=E作用素とS作用素とNILとから選択
・D作用素:
−条件:s.transがNILである。
s´.node=lの終点
s´.input=s.input
s´.trans=E作用素とS作用素とNILとから選択
上の記載において、「S作用素とNILとから選択」とは、s´にS作用素を適用できる可能性があればs´.transの値をS作用素とし、可能性がなければNILとすることを意味する。本実施の形態では、s´.inputの先頭が内容語であり、その語と同一の語を除く同品詞語をラベルとしs´.nodeを始点とするリンクが存在する場合にS作用素を適用できる可能性があると判断する。
初期状態では、pathsは空リストを要素とするリスト、nodeは先頭ノード、inputは入力単語列全体、transはE作用素である。目標状態は、nodeが最終ノード、かつinputが空リストであるような状態である。
上記の初期状態、作用素及び目標状態で表現される状態空間からコスト最小の目標状態を探索する。初期条件としてコスト上限値が与えられる。コスト上限値は入力文長と候補文長の和を距離しきい値に乗じた値である。
状態空間探索時に使用する評価関数f*を次のように定義する。
g(s)は初期状態から状態sに達するまでにかかったコストを示す。つまりg(s)は先に定義した状態のコストであり、s.pathsから計算できる。目標状態ではf*(s)=g(s)となる。h*(s)は状態sから目標状態までにかかるコストの下限である。
さらに、T作用素の適用が先行する場合を含めて状態sに最初に適用可能なE、S、I及びDの各作用素について、それが適用されたと仮定したときの目標状態までにかかるコストの下限を次の値とする。
・S作用素:h´(s)にSレコードの最小コストを加えた値。
(2)s.transがS作用素のときは、S作用素、I作用素又はD作用素が適用されたときのコストの下限の最小値
(3)s.transがNILのときは、I作用素又はD作用素が適用されたときのコストの下限の最小値。
探索処理は以下のように行なわれる。以下に示す探索処理は、コンピュータ上で実行されるプログラムにより上記した用例検索を行なう際のプログラムの制御の流れを示すものである。なお以下の説明中において、OPENは未展開状態を、CLOSEDは展開済状態を、それぞれ保持するためのリストを示す。また「同じ状態」とは、pathsを除く属性値が等しい状態を意味する。
(b)状態s´よりコストの大きい同じ状態がOPEN又はCLOSEDに既存であれば、この既存状態を消去し(ステップ196)、状態s´をOPENに追加する(ステップ198)。
単語グラフの形状の特徴として、開始ノードを始点とするリンク数が他のノードを始点とするリンク数よりも圧倒的に大きくなる傾向がある。そのためnode属性に開始ノードを持つ状態にD作用素が適用されると、多くの継続状態が作られることとなり計算時間が大きくなる。これは、照合列の先頭要素がDレコードとなる場合である。この展開数の増大を避けるため、単語グラフ中、先頭ノードから数段階の仮のリンクとノードを加える。先頭ノードを持つ状態からD作用素によって第1の仮のノードを持つ状態へ遷移する。第1の仮のノードは、全候補文について2番目の語をラベルとするリンクの始点となり、通常の単語グラフのノードに合流する。第1の仮のノードにある状態はE作用素又はS作用素の適用により通常のノードの状態、D作用素によって第2の仮のノードを持つ状態に遷移する。
以下、本実施の形態に係る用例機械翻訳装置30の動作について説明する。図1において、翻訳パターン抽出部48、翻訳パターン選択部52及び訳語置換部54の動作は特許文献1において提案されている用例機械翻訳装置の動作と同様である。従ってここではそれらについての詳しい説明は繰り返さず、用例検索部46による用例検索の詳細について説明する。
状態s0に適用可能な作用素はE作用素とT作用素とである。これらの作用素を適用して継続状態s1とs2とが得られる。OPENは{s1,s2}となる。
s2=[(()),ノード90,(全部,揃う,ます,た),NIL,2]
ここでOPENの中から、f*関数値の小さな状態s1が選ばれ展開される。状態s1に適用可能な作用素はS作用素とT作用素とである。「売り切れる」と「届く」とをラベルとする二つのリンクに関してS作用素の適用条件がテストされる。ここでは、1未満の意味距離の得られる「届く」のリンクについてのみテストが成功する。S作用素の適用により継続状態s3が得られる。またT作用素の適用により継続状態s4が生成される。OPENは{s2,s3,s4}となる。
s4=[(((E,全部))),ノード92,(揃う,ます,た),NIL,2]
ここでOPENの中から、f*関数値が最小の状態s3が選ばれ展開される。状態s3にE作用素を2回適用した状態s7が解となる。
この例の状態遷移の様子を図7に示す。図7に示されるように、T作用素の適用による遷移を除き、解である状態s7に向かって一直線に探索が進んでいる。
Claims (16)
- コンピュータ読取可能な、第1及び第2の言語の対訳関係にある用例からなる用例コーパスを記憶するための第1の記憶手段と、
それぞれコンピュータ読取可能な、前記第1及び第2の言語の対訳辞書並びに前記第1及び第2の言語のシソーラスを記憶するための第2の記憶手段と、
前記第1の言語の入力文を受け、前記シソーラスを用いて前記用例コーパスから前記入力文と所定の関係を有する用例を検索するための用例検索手段と、
前記用例検索手段により検索された用例と、前記対訳辞書及び前記シソーラスとを用いて前記第1の言語の入力文を前記第2の言語の文に翻訳するための翻訳手段とを含み、
前記用例コーパスは、各用例に含まれる前記第1の言語の単語列に含まれる内容語数及び機能語数に基づいて複数のグループに分割され、
前記用例検索手段は、
前記複数のグループの各々について、予め定義された単語列編集距離を用い、当該グループに含まれる前記第1の言語の単語列と前記入力文との間で距離の下限値を算出するための最小距離算出手段と、
前記複数のグループのうち、前記最小距離算出手段により算出された距離の下限値が所定のしきい値以下のもののみを選択するためのグループ選択手段と、
前記グループ選択手段により選択されたグループに含まれる用例の中で、前記単語列編集距離により定義される入力文との距離が最小の解を探索するための探索手段とを含む、用例機械翻訳装置。 - 前記用例検索手段はさらに、前記探索手段により解が見出されたことに応答して、前記探索手段による探索と並行して、前記所定のしきい値を前記見出された解の距離で置換するための手段を含む、請求項1に記載の用例機械翻訳装置。
- 前記複数のグループの各々に含まれる用例の、前記第1の言語の単語列は、一つの単語グラフ形式で表現され、
前記探索手段は、前記単語グラフの先頭ノードから最終ノードまでの可能な全経路について、当該経路に現れる単語列と入力単語列との照合を行なうことによって、前記入力単語列との間の単語列編集距離が最小となる経路を選択するための経路選択手段を含む、請求項1又は請求項2に記載の用例機械翻訳装置。 - 前記経路選択手段は、各グループに含まれる単語グラフの各経路に現れる単語列と、入力文との間の照合の途中経過を状態とする問題状態集合の中から、A*アルゴリズムを用いて単語列編集距離を最小にする目標状態を探索するための手段を含む、請求項3に記載の用例機械翻訳装置。
- コンピュータ読取可能な、第1及び第2の言語の対訳関係にある用例からなる用例コーパスを記憶するための第1の記憶装置と、それぞれコンピュータ読取可能な、前記第1及び第2の言語の対訳辞書並びに前記第1及び第2の言語のシソーラスを記憶するための第2の記憶装置とを備えたコンピュータ上で実行されると、当該コンピュータを、前記用例コーパスを用いた用例機械翻訳装置として動作させる、用例翻訳コンピュータプログラムであって、
前記用例機械翻訳装置は、
前記第1の言語の入力文を受け、前記シソーラスを用いて前記用例コーパスから前記入力文と所定の関係を有する用例を検索するための用例検索手段と、
前記用例検索手段により検索された用例と、前記対訳辞書及び前記シソーラスとを用いて前記第1の言語の入力文を前記第2の言語の文に翻訳するための翻訳手段とを含み、
前記用例コーパスは、各用例に含まれる前記第1の言語の単語列に含まれる内容語数及び機能語数に基づいて複数のグループに分割され、
前記用例検索手段は、
前記複数のグループの各々について、予め定義された単語列編集距離を用い、当該グループに含まれる前記第1の言語の単語列と前記入力文との間で距離の下限値を算出するための最小距離算出手段と、
前記複数のグループのうち、前記最小距離算出手段により算出された距離の下限値が所定のしきい値以下のもののみを選択するためのグループ選択手段と、
前記グループ選択手段により選択されたグループに含まれる用例の中で、前記単語列編集距離により定義される入力文との距離が最小の解を探索するための探索手段とを含む、用例翻訳コンピュータプログラム。 - 前記用例検索手段はさらに、前記探索手段により解が見出されたことに応答して、前記探索手段による探索と並行して、前記所定のしきい値を前記見出された解の距離で置換するための手段を含む、請求項5に記載の用例翻訳コンピュータプログラム。
- 前記複数のグループの各々に含まれる用例の、前記第1の言語の単語列は、一つの単語グラフ形式で表現され、
前記探索手段は、前記単語グラフの先頭ノードから最終ノードまでの可能な全経路について、当該経路に現れる単語列と入力単語列との照合を行なうことによって、前記入力単語列との間の単語列編集距離が最小となる経路を選択するための経路選択手段を含む、請求項5又は請求項6に記載の用例翻訳コンピュータプログラム。 - 前記経路選択手段は、各グループに含まれる単語グラフの各経路に現れる単語列と、入力文との間の照合の途中経過を状態とする問題状態集合の中から、A*アルゴリズムを用いて単語列編集距離を最小にする目標状態を探索するための手段を含む、請求項7に記載の用例翻訳コンピュータプログラム。
- コンピュータ読取可能な、第1及び第2の言語の対訳関係にある用例からなる用例コーパスを記憶するための第1の記憶手段と、それぞれコンピュータ読取可能な、前記第1及び第2の言語の対訳辞書並びに前記第1及び第2の言語のシソーラスを記憶するための第2の記憶手段と、前記用例コーパスから検索された用例と、前記対訳辞書及び前記シソーラスとを用いて前記第1の言語の入力文を前記第2の言語の文に翻訳するための翻訳手段とを含む用例機械翻訳装置で使用され、前記第1の言語の入力文を受け、前記シソーラスを用いて前記用例コーパスから前記入力文と所定の関係を有する用例を検索するための用例検索装置であって、
前記用例コーパスは、各用例に含まれる前記第1の言語の単語列に含まれる内容語数及び機能語数に基づいて複数のグループに分割され、
前記用例検索装置は、
前記複数のグループの各々について、予め定義された単語列編集距離を用い、当該グループに含まれる前記第1の言語の単語列と前記入力文との間で距離の下限値を算出するための最小距離算出手段と、
前記複数のグループのうち、前記最小距離算出手段により算出された距離の下限値が所定のしきい値以下のもののみを選択するためのグループ選択手段と、
前記グループ選択手段により選択されたグループに含まれる用例の中で、前記単語列編集距離により定義される入力文との距離が最小の解を探索するための探索手段とを含む、用例検索装置。 - さらに、前記探索手段により解が見出されたことに応答して、前記探索手段による探索と並行して、前記所定のしきい値を前記見出された解の距離で置換するための手段を含む、請求項9に記載の用例検索装置。
- 前記複数のグループの各々に含まれる用例の、前記第1の言語の単語列は、一つの単語グラフ形式で表現され、
前記探索手段は、前記単語グラフの先頭ノードから最終ノードまでの可能な全経路について、当該経路に現れる単語列と入力単語列との照合を行なうことによって、前記入力単語列との間の単語列編集距離が最小となる経路を選択するための経路選択手段を含む、請求項9又は請求項10に記載の用例検索装置。 - 前記経路選択手段は、各グループに含まれる単語グラフの各経路に現れる単語列と、入力文との間の照合の途中経過を状態とする問題状態集合の中から、A*アルゴリズムを用いて単語列編集距離を最小にする目標状態を探索するための手段を含む、請求項11に記載の用例検索装置。
- コンピュータ読取可能な、第1及び第2の言語の対訳関係にある用例からなる用例コーパスを記憶するための第1の記憶装置と、それぞれコンピュータ読取可能な、前記第1及び第2の言語の対訳辞書並びに前記第1及び第2の言語のシソーラスを記憶するための第2の記憶装置と、前記対訳コーパスから検索された用例を用いて、前記第1の言語の入力文を前記第2の言語の文に翻訳する用例機械翻訳手段とを備えたコンピュータ上で実行されると、当該コンピュータを、前記第1の言語の入力文を受け、前記シソーラスを用いて前記用例コーパスから前記入力文と所定の関係を有する用例を検索する用例検索装置として動作させる、用例検索コンピュータプログラムであって、
前記用例コーパスは、各用例に含まれる前記第1の言語の単語列に含まれる内容語数及び機能語数に基づいて複数のグループに分割され、
前記用例検索装置は、
前記複数のグループの各々について、予め定義された単語列編集距離を用い、当該グループに含まれる前記第1の言語の単語列と前記入力文との間で距離の下限値を算出するための最小距離算出手段と、
前記複数のグループのうち、前記最小距離算出手段により算出された距離の下限値が所定のしきい値以下のもののみを選択するためのグループ選択手段と、
前記グループ選択手段により選択されたグループに含まれる用例の中で、前記単語列編集距離により定義される入力文との距離が最小の解を探索するための探索手段とを含む、用例検索コンピュータプログラム。 - 前記用例検索装置はさらに、前記探索手段により解が見出されたことに応答して、前記探索手段による探索と並行して、前記所定のしきい値を前記見出された解の距離で置換するための手段を含む、請求項13に記載の用例検索コンピュータプログラム。
- 前記複数のグループの各々に含まれる用例の、前記第1の言語の単語列は、一つの単語グラフ形式で表現され、
前記探索手段は、前記単語グラフの先頭ノードから最終ノードまでの可能な全経路について、当該経路に現れる単語列と入力単語列との照合を行なうことによって、前記入力単語列との間の単語列編集距離が最小となる経路を選択するための経路選択手段を含む、請求項13又は請求項14に記載の用例検索コンピュータプログラム。 - 前記経路選択手段は、各グループに含まれる単語グラフの各経路に現れる単語列と、入力文との間の照合の途中経過を状態とする問題状態集合の中から、A*アルゴリズムを用いて単語列編集距離を最小にする目標状態を探索するための手段を含む、請求項15に記載の用例検索コンピュータプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004041751A JP2005234800A (ja) | 2004-02-18 | 2004-02-18 | 用例機械翻訳装置及び用例翻訳コンピュータプログラム、並びに用例検索装置及び用例検索コンピュータプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004041751A JP2005234800A (ja) | 2004-02-18 | 2004-02-18 | 用例機械翻訳装置及び用例翻訳コンピュータプログラム、並びに用例検索装置及び用例検索コンピュータプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005234800A true JP2005234800A (ja) | 2005-09-02 |
| JP2005234800A5 JP2005234800A5 (ja) | 2005-10-27 |
Family
ID=35017710
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004041751A Pending JP2005234800A (ja) | 2004-02-18 | 2004-02-18 | 用例機械翻訳装置及び用例翻訳コンピュータプログラム、並びに用例検索装置及び用例検索コンピュータプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005234800A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2007132564A1 (ja) * | 2006-05-13 | 2007-11-22 | Justsystems Corporation | データ処理装置及び方法 |
| JP2008152768A (ja) * | 2006-11-23 | 2008-07-03 | Sharp Corp | 翻訳システムにて二言語テキストのマッチングを行って精度を向上するための方法 |
| JP2009289219A (ja) * | 2008-05-30 | 2009-12-10 | Fuji Xerox Co Ltd | 翻訳メモリ翻訳装置および翻訳プログラム |
| WO2022044954A1 (en) * | 2020-08-31 | 2022-03-03 | Recruit Co., Ltd. | Systems and methods for unsupervised paraphrase mining |
-
2004
- 2004-02-18 JP JP2004041751A patent/JP2005234800A/ja active Pending
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2007132564A1 (ja) * | 2006-05-13 | 2007-11-22 | Justsystems Corporation | データ処理装置及び方法 |
| JP2008152768A (ja) * | 2006-11-23 | 2008-07-03 | Sharp Corp | 翻訳システムにて二言語テキストのマッチングを行って精度を向上するための方法 |
| JP2009289219A (ja) * | 2008-05-30 | 2009-12-10 | Fuji Xerox Co Ltd | 翻訳メモリ翻訳装置および翻訳プログラム |
| WO2022044954A1 (en) * | 2020-08-31 | 2022-03-03 | Recruit Co., Ltd. | Systems and methods for unsupervised paraphrase mining |
| US11741312B2 (en) | 2020-08-31 | 2023-08-29 | Recruit Co., Ltd. | Systems and methods for unsupervised paraphrase mining |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2610241C2 (ru) | Способ и система синтеза текста на основе извлеченной информации в виде rdf-графа с использованием шаблонов | |
| JP5071373B2 (ja) | 言語処理装置、言語処理方法および言語処理用プログラム | |
| JP3781561B2 (ja) | 自然言語解析装置、システム及び記録媒体 | |
| CN102339362B (zh) | 一种抽取蛋白质相互作用关系的方法 | |
| JP3617096B2 (ja) | 関係表現抽出装置および関係表現検索装置、関係表現抽出方法、関係表現検索方法 | |
| JP6772394B1 (ja) | 情報学習装置、情報処理装置、情報学習方法、情報処理方法及びプログラム | |
| JP5238034B2 (ja) | 近似照合装置、近似照合方法、プログラム及び記録媒体 | |
| Zheng et al. | Character-Based Parsing with Convolutional Neural Network. | |
| JP2005234800A (ja) | 用例機械翻訳装置及び用例翻訳コンピュータプログラム、並びに用例検索装置及び用例検索コンピュータプログラム | |
| US12333245B2 (en) | Methods and apparatus to improve disambiguation and interpretation in automated text analysis using structured language space and transducers applied on automatons | |
| KR102146625B1 (ko) | 오토마타 기반 증분적 중위 확률 계산 장치 및 방법 | |
| JP2004046775A (ja) | 固有表現抽出装置及び方法並びに固有表現抽出プログラム | |
| JP6772393B1 (ja) | 情報処理装置、情報学習装置、情報処理方法、情報学習方法及びプログラム | |
| JP4105756B2 (ja) | 自然言語解析装置及び方法、自然言語解析プログラム | |
| JP3027553B2 (ja) | 構文解析装置 | |
| JP4084816B2 (ja) | 依存構造情報処理装置、そのプログラム及び記録媒体 | |
| JP5160120B2 (ja) | 情報検索装置、情報検索方法及び情報検索プログラム | |
| JP3528849B2 (ja) | キーワード抽出装置およびキーワード抽出方法 | |
| CN119046444B (zh) | 一种基于大模型的科学文献字段抽取方法及系统 | |
| JP5521670B2 (ja) | パターンマッチング装置、翻訳装置、翻訳システム及び翻訳プログラム | |
| JP5339236B2 (ja) | 要素列の近似的な照合又は検索及びその方法を実行するためのプログラムを格納した記録媒体 | |
| JP4060832B2 (ja) | 自然言語解析装置及び方法、自然言語解析プログラム | |
| JP2004117647A (ja) | クラス言語モデル生成方法、クラス言語モデル生成装置及びクラス言語モデル生成プログラム | |
| JP4016018B2 (ja) | 自然言語解析装置、方法及びプログラム | |
| JP2776213B2 (ja) | 木文法パタン認識・解析・確率計算装置及び確率学習装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050729 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050729 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20071016 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071203 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20071225 |