JP2004282882A - 電力系統の安定判別方法及びそのプログラム - Google Patents
電力系統の安定判別方法及びそのプログラム Download PDFInfo
- Publication number
- JP2004282882A JP2004282882A JP2003069925A JP2003069925A JP2004282882A JP 2004282882 A JP2004282882 A JP 2004282882A JP 2003069925 A JP2003069925 A JP 2003069925A JP 2003069925 A JP2003069925 A JP 2003069925A JP 2004282882 A JP2004282882 A JP 2004282882A
- Authority
- JP
- Japan
- Prior art keywords
- power system
- stability
- determining
- input data
- generator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims abstract description 88
- 230000010355 oscillation Effects 0.000 claims abstract description 24
- 238000004458 analytical method Methods 0.000 claims abstract description 9
- 238000004088 simulation Methods 0.000 claims description 31
- 230000005540 biological transmission Effects 0.000 claims description 21
- 238000001514 detection method Methods 0.000 claims description 17
- 230000005856 abnormality Effects 0.000 claims description 9
- 238000012545 processing Methods 0.000 claims description 7
- 238000013459 approach Methods 0.000 claims description 3
- 230000007257 malfunction Effects 0.000 abstract description 21
- 230000006641 stabilisation Effects 0.000 abstract description 7
- 238000011105 stabilization Methods 0.000 abstract description 7
- 238000012850 discrimination method Methods 0.000 abstract description 4
- 238000000605 extraction Methods 0.000 abstract 1
- 238000004364 calculation method Methods 0.000 description 11
- 230000002159 abnormal effect Effects 0.000 description 7
- 238000012731 temporal analysis Methods 0.000 description 7
- 238000000700 time series analysis Methods 0.000 description 7
- 238000013016 damping Methods 0.000 description 5
- 238000007781 pre-processing Methods 0.000 description 4
- 230000001133 acceleration Effects 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 238000013019 agitation Methods 0.000 description 2
- 238000005070 sampling Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 230000003534 oscillatory effect Effects 0.000 description 1
- 238000010248 power generation Methods 0.000 description 1
- 230000000087 stabilizing effect Effects 0.000 description 1
Images







Landscapes
- Supply And Distribution Of Alternating Current (AREA)
Abstract
【課題】複雑な振動を伴う動揺波形や複数の動揺モードが干渉する中間領域の波形において極端な誤判別の生じない安定判別方法及びこれらの安定判別方法を組み合わせる事で、誤不動作はせず、誤動作をできる限り抑制する安定判別方法の提供。
【解決手段】動揺波形前半部及び後半部における波形の振幅を算出し、その比較結果を用いて判別を行うことを特徴とする自動安定判別方法、動揺波形前半部及び後半部における波形の実効値を算出し、その比較結果を用いて判別を行うことを特徴とする自動安定判別方法及び時系列解析による動揺モード抽出結果を用いて判別を行うことを特徴とする自動安定判別方法のうち、任意の方法の判別結果の論理積を用いて安定判別を行う。
【選択図】 図1
【解決手段】動揺波形前半部及び後半部における波形の振幅を算出し、その比較結果を用いて判別を行うことを特徴とする自動安定判別方法、動揺波形前半部及び後半部における波形の実効値を算出し、その比較結果を用いて判別を行うことを特徴とする自動安定判別方法及び時系列解析による動揺モード抽出結果を用いて判別を行うことを特徴とする自動安定判別方法のうち、任意の方法の判別結果の論理積を用いて安定判別を行う。
【選択図】 図1
Description
【0001】
【発明の属する技術分野】
本発明は、電力系統の自動安定判別方法及びそのプログラムに関する。
【0002】
【従来の技術】
従来の電力系統の自動安定判別には、発電機の位相角差が閾値を超えたことを検出する方法や電力動揺の単調増加を検出する方法がある(例えば、特許文献1参照)。また、エネルギー関数を応用したものなどがある(例えば、特許文献2参照)。特許文献1に開示された方法では、「発電機が脱調しているか否かの判別に、発電機の位相角差に対する一定の閾値を用いる。また、各時間刻みの位相角差を基に波形を認識し、波形データの極大値、極小値より振幅を求め、各振幅ごとに発散傾向(不安定)か収束傾向(安定)か否かを判別することもできる。また、各発電機の位相角差の代わりに、各発電機の角速度や加速エネルギーを用いて脱調判別を行なうことも可能である。」との記載がある。
【0003】
【特許文献1】
特開2001−352678号公報
【特許文献2】
特開平11−299097号公報
【0004】
また、大規模・複雑化した基幹系統では、電力系統の動揺が事故除去後も継続し、やがて脱調にいたる中間領域での安定度が問題となっているが、この対策として、複数の動揺モードが混在した中間領域の系統動揺を判別するために、プローニー解析法を用いた方法(例えば、特許文献3参照)や、時系列の有する動揺モードを時系列解析モデルにより検出する方法も提案されている(例えば、特許文献4参照)。
【0005】
【特許文献3】
特開2001−352679号公報
【特許文献4】
特開2000−32667号公報
【0006】
【発明が解決しようする課題】
しかしながら、上記特許文献1及び2の、従来技術によれば、図2に示すような複雑な振動を伴う動揺波形に対して正確な判別が行われない場合がある。これを回避するための例外処理を行うと、例外処理のための閾値の設定や場合分けなどが複雑になるという問題がある。
【0007】
また、図3のような複数の動揺モードが干渉する中間領域の判別も困難である。この対策として上記特許文献3及び4の各方法が有効と考えられるが、特許文献3の方法はノイズを含んだ波形の判別が難しい。一方特許文献4の方法は、ノイズには強いが、この方法を単独で用いた場合は、発電機が系統に接続されている位置によっては、誤不動作が発生しやすいという問題がある。
【0008】
ここで、誤不動作とは、実際には不安定となっている波形に対して安定の判別を行うことをいう。一方、実際には安定となっている波形に対して不安定の判別を行う場合を誤動作という。
【0009】
上記のように、単一の安定判別方法によって、あらゆる波形の安定/不安定を確実に判別することは、困難である。また、このような安定判別を用いて系統運用する際には、誤動作は許容されたとしても、誤不動作は許容できない。
【0010】
そこで、本発明は、複雑な振動を伴う動揺波形に対して、極端な誤判別の生じない安定判別方法を得ること、複数の動揺モードが干渉する中間領域の波形において極端な誤判別の生じない安定判別方法を得ること、これらの安定判別方法を組み合わせる事で、誤不動作はせず、誤動作をできる限り抑制する安定判別方法を得ることを課題とする。
【0011】
【課題を解決するための手段】
上記課題を解決するために為された本発明による電力系統の安定判別方法は、複数の発電機を含む電力系統において、想定した事故が発生した後の電力系統の動揺を一定の時間領域でシミュレーションした結果について、この電力系統の安定度をコンピュータにより判別する方法である。
【0012】
そして、第一安定判別方法は、入力手段が前記シミュレーションで得られた各発電機の状態を表す変数を入力データとして時系列で入力するステップと、演算手段が前記時系列の前半部及び後半部それぞれにおける前記入力データの振幅、すなわち最大値と最小値の差を算出するステップと、判別手段が前記前半部と後半部との振幅の比較結果を基準データとして電力系統の安定度の判別を行うステップから構成されることを特徴とする電力系統の安定判別方法である。
【0013】
第二安定判別方法は、入力手段が前記シミュレーションで得られた各発電機の状態を表す変数を入力データとして時系列で入力するステップと、演算手段が前記時系列の前半部及び後半部それぞれにおける入力データの波形の実効値を算出するステップと、判別手段が前記前半部と後半部との前記実効値の比較結果を基準データとして電力系統の安定度の判別を行うステップから構成されることを特徴とする電力系統の安定判別方法である。
【0014】
第三安定判別方法は、入力手段が前記シミュレーションで得られた送電線両端の位相差及び各発電機の内部位相角を入力データとして時系列で入力するステップと、演算手段が前記送電線両端の位相差及び各発電機の内部位相角の自己回帰モデルの最適な次数とパラメータを設定すると共に、前記自己回帰モデルを用いて動揺モードの検出を行うステップと、判別手段が前記送電線両端の位相差及び各発電機の内部位相角の自己回帰モデルによる動揺モード検出結果を基準データとして安定度の判別を行うステップから構成されることを特徴とする電力系統の安定判別方法である。
【0015】
第四安定判別方法は、前記第三安定判別方法のステップに加え、前記演算手段が、前記動揺モード検出の際に、前記シミュレーションで得られた送電線両端の位相差及び各発電機の内部位相角の時系列による入力データの時間領域の両端での値がその入力データの平均値に近づくように、前記時間領域の両端となる時刻を決定するステップと、前記演算手段が、前記動揺モード検出の際に、逆時系列による入力データから検出される動揺モードと照合するステップと、前記演算手段が、前記自己回帰モデルの最適な次数を設定する際に、次数が探索範囲の上限値となるとき、周期が重複した動揺モードがなくなるまで次数を低減するステップとから構成されることを特徴とする電力系統の安定判別方法である。
【0016】
そして、上記各安定判別方法の利点を併せ持つ構成として、前記第一安定判別方法乃至第四安定判別方法のうちの少なくとも二つの安定判別方法を併用する電力系統の安定判別方法であって、正常終了手段が、併用された少なくとも二つの判別結果の論理積を判別結果とするステップを備えることを特徴とする電力系統の安定判別方法とする場合もある。
【0017】
更に、上記課題を解決する為に為された本発明による電力系統の安定判別用プログラムとして、複数の発電機を含む電力系統において、想定した事故が発生した後の電力系統の動揺を一定の時間領域でシミュレーションした結果について、この電力系統の安定度を自動判別するために、以下の安定判別用プログラムが挙げられる。
【0018】
このプログラムは、コンピュータを、異常検出手段、第一判別手段、第二判別手段、第三判別手段、及び第四判別手段、並びに正常終了手段、及び異常終了手段として機能させるものである。
【0019】
前記異常検出手段は、前記シミュレーションにおける解析対象時間内に脱調する発電機や、前記シミュレーションで前記変数を導く演算が収束しないことによる異常終了を検出するものである。
【0020】
また、前記第一安定判別手段は、前記シミュレーションで得られた各発電機の状態を表す変数を入力データとして時系列で入力し、前記時系列の前半部及び後半部のそれぞれにおける前記入力データの振幅を算出し、前記前半部と後半部との振幅の比較結果を基準データとして電力系統の安定度の判別を行うものである。
【0021】
また、前記第二安定判別手段は、前記シミュレーションで得られた各発電機の状態を表す変数を入力データとして時系列で入力し、前記時系列の前半部及び後半部それぞれにおける入力データの波形の実効値を算出し、前記前半部と後半部との前記実効値の比較結果を基準データとして電力系統の安定度の判別を行うものである。
【0022】
また、前記第三安定判別手段は、前記シミュレーションで得られた送電線両端の位相差及び各発電機の内部位相角を入力データとして時系列で入力し、前記送電線両端の位相差及び各発電機の内部位相角の自己回帰モデルの最適な次数とパラメータを設定し、前記自己回帰モデルを用いて動揺モードの検出を行し、前記送電線両端の位相差及び各発電機の内部位相角の自己回帰モデルによる動揺モード検出結果を基準データとして安定度の判別を行うものである。
【0023】
更に、前記第四安定判別手段は、当該第三安定判別手段において、前記動揺モード検出の際に、前記シミュレーションで得られた送電線両端の位相差及び各発電機の内部位相角の時系列による入力データの時間領域の両端での値がその入力データの平均値に近づくように、前記時間領域の両端となる時刻を決定し、前記動揺モード検出の際に、逆時系列による入力データから検出される動揺モードと照合し、前記自己回帰モデルの最適な次数を設定する際に、次数が探索範囲の上限値となるとき、周期が重複する動揺モードがなくなるまで次数を削減するものである。
【0024】
一方、前記正常終了手段は、前記第一安定判別手段及び第二安定判別手段並びに第三安定判別手段又は第四安定判別手段のいずれかの安定判別処理において安定と判別された場合に電力系統が安定であると判別し安定判別処理を終了するものであり、前記異常終了手段は、前記シミュレーションにおける解析対象時間内に前記異常検出手段により脱調する発電機が有る場合や前記シミュレーションで前記変数を導く演算が収束せず異常終了した場合、或いは、前記第一安定判別手段乃至第四安定判別手段のいずれかの安定判別処理において不安定と判断された場合に、電力系統が不安定であると判別し安定判別処理を終了するものである。
【0025】
【発明の実施の形態】
以下、本発明による電力系統の安定判別方法の実施形態を図面に基づき説明する。
本発明による電力系統の安定判別方法は、複数の発電機を含む電力系統において、想定した事故が発生した後の電力系統の動揺について、発電機の運動方程式や電力系統の回路方程式を収束計算することで、各発電機等の状態を表す変数を求め、これを時間刻みごとに逐次繰り返すことで、シミュレーションを行い、その結果に基づき電力系統が安定であるか否かを判別するものであって、CPUや記憶手段等、各種ハードウエア資源からなるコンピュータを、異常検出手段、第一判別手段、第二判別手段、第三判別手段、及び第四判別手段、並びに正常終了手段、及び異常終了手段として機能させる電力系統の安定判別用プログラムによって制御されたものである。
【0026】
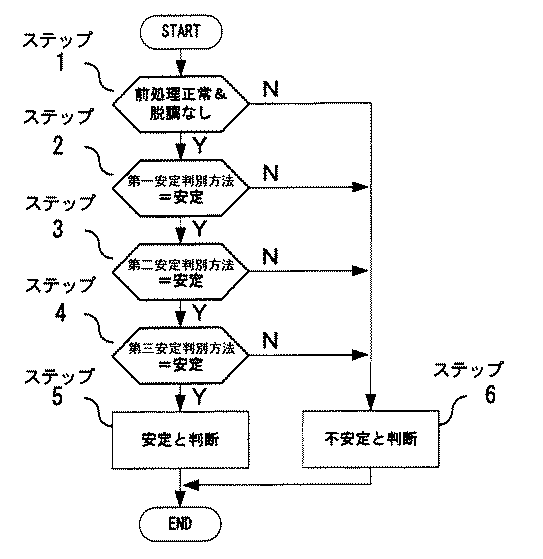
前記異常検出手段は、安定判別処理の前処理として、前記シミュレーションにおける解析対象時間内での入力データから、脱調する発電機の有無や、計算が収束せずに終了する異常終了の有無を検出するステップ(ステップ1)を行うものである。
【0027】
当該前処理が正常に終了した場合は、続いてコンピュータを第一判別手段として機能させ(ステップ2)、当該第一判別手段による判別結果が安定の場合は、続いてコンピュータを第二判別手段として機能させ(ステップ3)、当該第二判別手段による判別結果が安定の場合は、続いてコンピュータを第三判別手段又は第四判別手段として機能させ(ステップ4)、当該第三判別手段又は第四判別手段による判別結果が安定の場合は、コンピュータを前記正常終了手段と機能させ総合判別結果が安定であると判別し一連の安定判別方法を終了する(ステップ5)。
【0028】
また、当該前処理(ステップ1)で脱調と判定された場合や解析が異常終了した場合、乃至はステップ2〜4のいずれかで、不安定の判別結果が得られた場合は、コンピュータを前記異常終了手段として機能させ、総合判別結果として電力系統が不安定であると取り扱い当該一連の安定判別方法を終了する(ステップ6)。
【0029】
以下、各安定判別方法についてさらに詳しく説明する。前記第一安定判別手段は、入力手段が前記シミュレーションで得られた各発電機の状態を表す変数を入力データとして時系列で入力するステップと、演算手段が前記時系列の前半部及び後半部それぞれにおける前記入力データの振幅、すなわち最大値と最小値の差を算出するステップと、判別手段が前記前半部と後半部との振幅の比較結果を基準データとして電力系統の安定度の判別を行うステップとを行う第一安定判別方法を実施するものである。
【0030】
具体的には、例えば、各発電機の状態を表す変数として発電機角速度偏差を用い、図4にプロットされたような発電機角速度偏差波形について、波形の前半部の振幅A、及び波形の後半部の振幅BについてB/Aを算出し、B/Aがある閾値(例えば0.95)を超えた場合に不安定と判断すると共に、それ以外の場合は、安定と判断する。
【0031】
この方法は、設定を容易に行うことができ、また計算も単純であり高速に判別が可能であるという長所をもつ。一方、複数の動揺モードが干渉する中間領域の波形に対して、誤不動作を生ずる恐れがある。これを極力回避するためには、判別の閾値を小さくすることが考えられるが、誤動作が増加するため、あまり閾値を小さくすることはできない。また、急峻なスパイクのようなノイズがある場合は、誤判別の可能性が高くなるという欠点がある。
【0032】
なお、この例では、発電機角速度偏差波形について判別を行ったが、発電機内部相差角波形や、発電機加速エネルギー波形を用いて判別を行うことも可能である。
【0033】
第二安定判別手段は、入力手段が前記シミュレーションで得られた各発電機の状態を表す変数を入力データとして時系列で入力するステップと、演算手段が前記時系列の前半部及び後半部それぞれにおける入力データの波形の実効値を算出するステップと、判別手段が前記前半部と後半部との前記実効値の比較結果を基準データとして電力系統の安定度の判別を行うステップとを行う第二安定判別方法を実施するものである。
【0034】
具体的には、例えば、各発電機の状態を表す変数として発電機角速度偏差を用い、図4にプロットされたような発電機角速度偏差波形について、実効値に相当する数値の減衰傾向を判別するものである。具体的には、波形の前半部 (i=1とする)と後半部(i=2とする)それぞれにおいて(1)式によりWiを算出し、W2/W1がある閾値(例えば0.95)を超えた場合に不安定と判断すると共に、それ以外の場合は、安定と判断する。
【0035】
【数1】
 ただし、N:発電機角速度偏差[PU]、Navg:発電機角速度偏差時系列データの平均値[PU]、Nのサンプリング刻み時間はΔt[sec]である。
ただし、N:発電機角速度偏差[PU]、Navg:発電機角速度偏差時系列データの平均値[PU]、Nのサンプリング刻み時間はΔt[sec]である。
【0036】
ti及びTには、一定の定数を用いても一応判別が可能であるが、より誤判別を少なくするために、tiとしては、波形がNavgを横切った瞬間、Tはtiから数周期後において波形がNavgを横切った瞬間となるように波形に応じて可変の値とすることも可能である。
【0037】
この方法は、第一安定判別方法の(ステップ2)と比較すれば、若干計算が複雑になるが、比較的単純であり高速に判別が可能であるという長所をもつ。また、スパイク状のノイズにも強い。一方、複数の動揺モードが干渉する中間領域の波形に対しては、前記第一安定判別方法と同様、誤不動作を生ずる恐れがある。
【0038】
なお、当該第二安定判別方法(ステップ3)においても、発電機内部相差角波形や、発電機加速エネルギー波形を用いて判別を行うことも可能である。
【0039】
前記第三安定判別手段は、入力手段が前記シミュレーションで得られた送電線両端の位相差及び各発電機の内部位相角を入力データとして時系列で入力するステップと、演算手段が前記送電線両端の位相差及び各発電機の内部位相角の自己回帰モデルの最適な次数とパラメータを設定するステップ、及び前記自己回帰モデルを用いて動揺モードの検出を行うステップと、判別手段が前記送電線両端の位相差及び各発電機の内部位相角の自己回帰モデルによる動揺モード検出結果を基準データとして安定度の判別を行うステップとを行う第三安定判別方法を実施するものである。
【0040】
当該第三安定判別方法は、前記演算手段による時系列解析によるものである。時系列解析とは、動揺する前記送電線両端の位相差及び各発電機の内部位相角の振動波形を、後述する次数の自動決定手法により、m次の自己回帰モデル((2)式参照)で表現して、得られた差分方程式をZ変換して得られる特性方程式((3)式参照)の特性根piを求めることで、動揺モードを検出する方法である。
【0041】
【数2】
ただし、yは出力信号(系統動揺)の時系列データ、wは白色雑音の時系列データ、aiは自己回帰モデルのパラメータ、mは自己回帰モデルの次数である。
【0042】
【数3】
ただし、piは特性根(実根か共役複素根),D(z)は特性方程式である。
【0043】
時系列解析の結果、共役複素根の特性根が存在する場合、その特性根で表現されるモードは振動的に変化する性質がある。さらにその共役複素根の絶対値が1より大きい場合、減衰率が正の不安定なモードが1つ存在し、絶対値が1より小さい場合は、減衰率が負の安定なモードが1つ存在する。絶対値がちょうど1の場合は、減衰率が0であり、持続振動となるモードが1つ存在する。一方、実根の特性根が存在する場合,その特性根で表現されるモードは一方向に単調に変化する性質がある。即ち、特性根が共役複素根のときに、その実部から動揺モードの減衰率が求まり,虚部から動揺モードの周期が求まることとなる。
【0044】
本発明では、系統状態や事故点などで大きく変化する動揺モードを精度よく検出するために、前記の如く自己回帰モデルの最適な次数とパラメータを自動設定する特徴を有する。この具体的な手順について以下に述べる。
【0045】
図5に示すフローチャートのように、まず、前記入力手段としての機能により時系列の入力データを取り込む。次に、前記演算手段としての機能によりモデルの次数を探索範囲内で順次更新しながら、各次数のモデルにおけるパラメータおよび赤池のFPE((4)式参照)を算出する。前記自己回帰モデルの次数を更新する探索範囲は、Nを時系列データ数として、1〜3√Nである。赤池のFPE((4)式参照)を用いて同定精度を診断し,赤池のFPEが最小となる次数の自己回帰モデルを用いて、動揺モードの解析を実施する。次に、検出された動揺モードを診断し、その変動量が時系列解析で得られる実根よりも大きく、且つその周期が、時系列の入力データのサンプリング時間の5倍から解析対象時間までの範囲にある動揺モードを有効な動揺モードと特定する。
【0046】
【数4】
ただし、nは時系列データの数、mは自己回帰モデルの次数、σ2は自己回帰モデル誤差の分散である。
【0047】
即ち、前記ステップ4の処理の全容は図6のようになる。まずシミュレーションで得られた送電線両端の位相差について、前記演算手段としての機能による時系列解析により動揺モードの検出を行い、不安定モードを特定する。次に各発電機の内部位相角の時系列データについても動揺モードの検出を行い、不安定モードを特定する。そして、前記判別手段の機能により上記動揺モード検出結果を基準データとして送電線の不安定モードと一致する不安定モードが発電機に存在する場合は不安定と判別し、存在しない場合は安定と判別する。
【0048】
また、送電線で減衰率が正の動揺モードが検出されない場合には安定と判別する代わりに、送電線で減衰率が正の動揺モードが検出されない場合、多数の発電機で検出される動揺モードの中に、減衰率が正で、送電線で検出される動揺モードと同一周期の動揺モードが存在すれば不安定と判別することで、誤不動作の抑制を図ることもできる。ただし、この論理を追加すると、誤動作が増加する傾向があるため、ステップ2乃至ステップ3の方法と組み合わせて判別を実施する場合は、この論理の追加は必要ない。
【0049】
当該ステップ4において採用される処理としては、以上述べたような時系列解析法を用いる代わりに、上記第三安定判別方法とは以下の点で異なる第四安定判別方法を用いることもできる。
【0050】
第四安定判別方法は、前記第三安定判別方法のステップに加え、前記演算手段が、前記自己回帰モデルにとって誤差の要因となる不要なデータを取り除くため、前記動揺モード検出の際に、前記自己回帰モデルの同定に用いるデータの時間領域の両端での値がそのデータの平均値に近づくように、前記時間領域の両端となる時刻を決定するステップを付加することができる。
【0051】
また、前記演算手段が、発散傾向のデータの判別精度を向上させるため、前記動揺モード検出の際に、図7のフローチャートに示すように、正方向で特定された動揺モードに加えて、逆方向で特定される動揺モードと照合するステップを加えることができる。具体的には、図7に示すフローチャートのように、送電線両端の位相差の時系列データから極めて減衰の悪い動揺モード(以下、動揺モードAと記す)が検出された場合、逆方向の時系列データを用いて動揺モードを検出する。前記動揺モードAと同一周期の逆方向の動揺モード(以下、動揺モードBと記す)が存在する場合は、この逆方向のデータから得られる動揺モードBの減衰率と元の動揺モードAの減衰率を比較し、同一の時間軸方向で見て、前者の減衰の方が悪ければ、前者の減衰率を用いて判別を行う。
【0052】
更に、前記演算手段が、自己回帰モデルの最適な次数を設定する際に、赤池のFPEによる基準値を評価関数として求められる次数が探索範囲の上限値となるとき、周期の重複した動揺モードが検出されて誤判別となることが多いため、その場合には、周期が重複する動揺モードがなくなるまで次数を低減するステップを加えることができる。
【0053】
具体的には、図8に示すフローチャートのように、周期の重複した動揺モード(以下,重複モードと記す)の数Nを算出し、2Nだけ次数を低減して再度動揺モード検出を実施する。その後、重複モードの有無を確認し、重複モードが無ければその動揺モードを採用、重複モードがあれば再度重複モードの数を算出して、先の手順に戻り、重複モードがなくなるまで繰り返す。
【0054】
最後にステップ5及び6では、ステップ2から4の判別結果を集約して最終判別結果を出力するが、当該例では、ステップ2から4のすべての判別結果が安定となった場合に限って、前記正常終了手段の機能により電力系統が安定であると判別され安定判別処理を終了するものであり、それ以外の場合、即ち、前記異常検出手段による前処理中に前記異常検出手段により脱調する発電機が有る場合や前記シミュレーションで前記変数を導く演算が収束せず異常終了した場合、或いは、前記第一安定判別手段乃至第三又は第四安定判別手段のいずれかの安定判別処理において不安定と判断された場合は、前記異常終了手段の機能により電力系統が不安定であると判別し安定判別処理を終了する。
【0055】
これは、例えば、この判別結果によって、系統安定化を実施する場合に、誤動作によって安定化制御が若干増加してしまうことは止むを得ないが、誤不動作によって系統が崩壊してしまう事態は許容しがたいために、このような方法を採っているものである。しかしながら、逆に誤不動作が許容される場合は、ステップ2から4のすべての判別が不安定となった場合に限って、総合判別が不安定となり、それ以外の場合を安定とする方法とすることも可能である。
【0056】
また、必ずしもステップ2から4の全てを実施する必要はなく、それぞれのステップを単独で用いて安定判別を実施すること、もしくは、任意の2つのステップを組み合わせて安定判別を実施することも、もちろん可能である。この場合は、必要に応じて閾値を厳しめの値とする等の対策により、誤不動作が生じないようにすることが可能である。
【0057】
さらに、図1のステップ2から4の実施順序は、必ずしもこの通りである必要はなく、例えばステップ4の一部(送電線の動揺モードチェック)のみを先に実施してこの収束性が良い場合は、安定と判別し、それ以外の場合について、ステップ2、3を実施するという方法も可能である。
【0058】
表1及び表2に、本発明による電力系統の安定判別方法を適用した結果の一例を示す。
表1は、図1における、ステップ1が終了した、総数251ケースのシミュレーション結果について図1における、ステップ2及び3を単独で適用した結果をまとめた例である。ステップ2、3では、誤不動作が少ない結果が得られる事がわかる。ただし、図3のような波形の判別は困難である。
【0059】
【表1】
【0060】
表2は、図1における、ステップ1が終了した、総数251ケースのシミュレーション結果について図1における、ステップ4を単独で適用した結果をまとめた例である。ステップ4では、誤動作が少ない結果が得られる事がわかる。このため、ステップ2、3の判別と組み合わせて用いたとしても、総合判別において、誤動作が増加する恐れが少ない。
【0061】
【表2】
【0062】
【発明の効果】
以上説明したように、前記第一安定判別方法及び第二安定判別方法によれば、複雑な振動を伴う動揺波形に対して、極端な誤判別の生じることがなく、かつ、閾値設定が容易であり、計算も比較的単純であり高速な安定判別が可能である。また、第三安定判別方法及び第四安定判別方法によれば、複数の動揺モードが干渉する中間領域の波形に対しても、極端な誤判別の生じない安定判別が可能である。さらに、それらを組み合わせる事で、誤不動作はせず、誤動作をできる限り抑制する電力系統の安定判別方法が得られる。
【図面の簡単な説明】
【図1】本発明による電力系統の安定判別方法の一例を示すフローチャートである。
【図2】複雑な振動を伴う動揺波形の例を示す図である。
【図3】複数の動揺モードが干渉する波形の例を示す図である。
【図4】図1中のステップ1の適用例の説明図である。
【図5】本発明による電力系統の安定判別方法における自己回帰モデルの次数を自動決定する手順を説明するフローチャートである。
【図6】図1中のステップ4の具体的な算出手順を説明するフローチャートである。
【図7】本発明による電力系統の安定判別方法における正方向と逆方向の時系列データから検出される動揺モードを照合する方法を説明するフローチャートである。
【図8】本発明による電力系統の安定判別方法における重複モードがなくなるまで次数を低減する手順を説明するフローチャートである。
【発明の属する技術分野】
本発明は、電力系統の自動安定判別方法及びそのプログラムに関する。
【0002】
【従来の技術】
従来の電力系統の自動安定判別には、発電機の位相角差が閾値を超えたことを検出する方法や電力動揺の単調増加を検出する方法がある(例えば、特許文献1参照)。また、エネルギー関数を応用したものなどがある(例えば、特許文献2参照)。特許文献1に開示された方法では、「発電機が脱調しているか否かの判別に、発電機の位相角差に対する一定の閾値を用いる。また、各時間刻みの位相角差を基に波形を認識し、波形データの極大値、極小値より振幅を求め、各振幅ごとに発散傾向(不安定)か収束傾向(安定)か否かを判別することもできる。また、各発電機の位相角差の代わりに、各発電機の角速度や加速エネルギーを用いて脱調判別を行なうことも可能である。」との記載がある。
【0003】
【特許文献1】
特開2001−352678号公報
【特許文献2】
特開平11−299097号公報
【0004】
また、大規模・複雑化した基幹系統では、電力系統の動揺が事故除去後も継続し、やがて脱調にいたる中間領域での安定度が問題となっているが、この対策として、複数の動揺モードが混在した中間領域の系統動揺を判別するために、プローニー解析法を用いた方法(例えば、特許文献3参照)や、時系列の有する動揺モードを時系列解析モデルにより検出する方法も提案されている(例えば、特許文献4参照)。
【0005】
【特許文献3】
特開2001−352679号公報
【特許文献4】
特開2000−32667号公報
【0006】
【発明が解決しようする課題】
しかしながら、上記特許文献1及び2の、従来技術によれば、図2に示すような複雑な振動を伴う動揺波形に対して正確な判別が行われない場合がある。これを回避するための例外処理を行うと、例外処理のための閾値の設定や場合分けなどが複雑になるという問題がある。
【0007】
また、図3のような複数の動揺モードが干渉する中間領域の判別も困難である。この対策として上記特許文献3及び4の各方法が有効と考えられるが、特許文献3の方法はノイズを含んだ波形の判別が難しい。一方特許文献4の方法は、ノイズには強いが、この方法を単独で用いた場合は、発電機が系統に接続されている位置によっては、誤不動作が発生しやすいという問題がある。
【0008】
ここで、誤不動作とは、実際には不安定となっている波形に対して安定の判別を行うことをいう。一方、実際には安定となっている波形に対して不安定の判別を行う場合を誤動作という。
【0009】
上記のように、単一の安定判別方法によって、あらゆる波形の安定/不安定を確実に判別することは、困難である。また、このような安定判別を用いて系統運用する際には、誤動作は許容されたとしても、誤不動作は許容できない。
【0010】
そこで、本発明は、複雑な振動を伴う動揺波形に対して、極端な誤判別の生じない安定判別方法を得ること、複数の動揺モードが干渉する中間領域の波形において極端な誤判別の生じない安定判別方法を得ること、これらの安定判別方法を組み合わせる事で、誤不動作はせず、誤動作をできる限り抑制する安定判別方法を得ることを課題とする。
【0011】
【課題を解決するための手段】
上記課題を解決するために為された本発明による電力系統の安定判別方法は、複数の発電機を含む電力系統において、想定した事故が発生した後の電力系統の動揺を一定の時間領域でシミュレーションした結果について、この電力系統の安定度をコンピュータにより判別する方法である。
【0012】
そして、第一安定判別方法は、入力手段が前記シミュレーションで得られた各発電機の状態を表す変数を入力データとして時系列で入力するステップと、演算手段が前記時系列の前半部及び後半部それぞれにおける前記入力データの振幅、すなわち最大値と最小値の差を算出するステップと、判別手段が前記前半部と後半部との振幅の比較結果を基準データとして電力系統の安定度の判別を行うステップから構成されることを特徴とする電力系統の安定判別方法である。
【0013】
第二安定判別方法は、入力手段が前記シミュレーションで得られた各発電機の状態を表す変数を入力データとして時系列で入力するステップと、演算手段が前記時系列の前半部及び後半部それぞれにおける入力データの波形の実効値を算出するステップと、判別手段が前記前半部と後半部との前記実効値の比較結果を基準データとして電力系統の安定度の判別を行うステップから構成されることを特徴とする電力系統の安定判別方法である。
【0014】
第三安定判別方法は、入力手段が前記シミュレーションで得られた送電線両端の位相差及び各発電機の内部位相角を入力データとして時系列で入力するステップと、演算手段が前記送電線両端の位相差及び各発電機の内部位相角の自己回帰モデルの最適な次数とパラメータを設定すると共に、前記自己回帰モデルを用いて動揺モードの検出を行うステップと、判別手段が前記送電線両端の位相差及び各発電機の内部位相角の自己回帰モデルによる動揺モード検出結果を基準データとして安定度の判別を行うステップから構成されることを特徴とする電力系統の安定判別方法である。
【0015】
第四安定判別方法は、前記第三安定判別方法のステップに加え、前記演算手段が、前記動揺モード検出の際に、前記シミュレーションで得られた送電線両端の位相差及び各発電機の内部位相角の時系列による入力データの時間領域の両端での値がその入力データの平均値に近づくように、前記時間領域の両端となる時刻を決定するステップと、前記演算手段が、前記動揺モード検出の際に、逆時系列による入力データから検出される動揺モードと照合するステップと、前記演算手段が、前記自己回帰モデルの最適な次数を設定する際に、次数が探索範囲の上限値となるとき、周期が重複した動揺モードがなくなるまで次数を低減するステップとから構成されることを特徴とする電力系統の安定判別方法である。
【0016】
そして、上記各安定判別方法の利点を併せ持つ構成として、前記第一安定判別方法乃至第四安定判別方法のうちの少なくとも二つの安定判別方法を併用する電力系統の安定判別方法であって、正常終了手段が、併用された少なくとも二つの判別結果の論理積を判別結果とするステップを備えることを特徴とする電力系統の安定判別方法とする場合もある。
【0017】
更に、上記課題を解決する為に為された本発明による電力系統の安定判別用プログラムとして、複数の発電機を含む電力系統において、想定した事故が発生した後の電力系統の動揺を一定の時間領域でシミュレーションした結果について、この電力系統の安定度を自動判別するために、以下の安定判別用プログラムが挙げられる。
【0018】
このプログラムは、コンピュータを、異常検出手段、第一判別手段、第二判別手段、第三判別手段、及び第四判別手段、並びに正常終了手段、及び異常終了手段として機能させるものである。
【0019】
前記異常検出手段は、前記シミュレーションにおける解析対象時間内に脱調する発電機や、前記シミュレーションで前記変数を導く演算が収束しないことによる異常終了を検出するものである。
【0020】
また、前記第一安定判別手段は、前記シミュレーションで得られた各発電機の状態を表す変数を入力データとして時系列で入力し、前記時系列の前半部及び後半部のそれぞれにおける前記入力データの振幅を算出し、前記前半部と後半部との振幅の比較結果を基準データとして電力系統の安定度の判別を行うものである。
【0021】
また、前記第二安定判別手段は、前記シミュレーションで得られた各発電機の状態を表す変数を入力データとして時系列で入力し、前記時系列の前半部及び後半部それぞれにおける入力データの波形の実効値を算出し、前記前半部と後半部との前記実効値の比較結果を基準データとして電力系統の安定度の判別を行うものである。
【0022】
また、前記第三安定判別手段は、前記シミュレーションで得られた送電線両端の位相差及び各発電機の内部位相角を入力データとして時系列で入力し、前記送電線両端の位相差及び各発電機の内部位相角の自己回帰モデルの最適な次数とパラメータを設定し、前記自己回帰モデルを用いて動揺モードの検出を行し、前記送電線両端の位相差及び各発電機の内部位相角の自己回帰モデルによる動揺モード検出結果を基準データとして安定度の判別を行うものである。
【0023】
更に、前記第四安定判別手段は、当該第三安定判別手段において、前記動揺モード検出の際に、前記シミュレーションで得られた送電線両端の位相差及び各発電機の内部位相角の時系列による入力データの時間領域の両端での値がその入力データの平均値に近づくように、前記時間領域の両端となる時刻を決定し、前記動揺モード検出の際に、逆時系列による入力データから検出される動揺モードと照合し、前記自己回帰モデルの最適な次数を設定する際に、次数が探索範囲の上限値となるとき、周期が重複する動揺モードがなくなるまで次数を削減するものである。
【0024】
一方、前記正常終了手段は、前記第一安定判別手段及び第二安定判別手段並びに第三安定判別手段又は第四安定判別手段のいずれかの安定判別処理において安定と判別された場合に電力系統が安定であると判別し安定判別処理を終了するものであり、前記異常終了手段は、前記シミュレーションにおける解析対象時間内に前記異常検出手段により脱調する発電機が有る場合や前記シミュレーションで前記変数を導く演算が収束せず異常終了した場合、或いは、前記第一安定判別手段乃至第四安定判別手段のいずれかの安定判別処理において不安定と判断された場合に、電力系統が不安定であると判別し安定判別処理を終了するものである。
【0025】
【発明の実施の形態】
以下、本発明による電力系統の安定判別方法の実施形態を図面に基づき説明する。
本発明による電力系統の安定判別方法は、複数の発電機を含む電力系統において、想定した事故が発生した後の電力系統の動揺について、発電機の運動方程式や電力系統の回路方程式を収束計算することで、各発電機等の状態を表す変数を求め、これを時間刻みごとに逐次繰り返すことで、シミュレーションを行い、その結果に基づき電力系統が安定であるか否かを判別するものであって、CPUや記憶手段等、各種ハードウエア資源からなるコンピュータを、異常検出手段、第一判別手段、第二判別手段、第三判別手段、及び第四判別手段、並びに正常終了手段、及び異常終了手段として機能させる電力系統の安定判別用プログラムによって制御されたものである。
【0026】
前記異常検出手段は、安定判別処理の前処理として、前記シミュレーションにおける解析対象時間内での入力データから、脱調する発電機の有無や、計算が収束せずに終了する異常終了の有無を検出するステップ(ステップ1)を行うものである。
【0027】
当該前処理が正常に終了した場合は、続いてコンピュータを第一判別手段として機能させ(ステップ2)、当該第一判別手段による判別結果が安定の場合は、続いてコンピュータを第二判別手段として機能させ(ステップ3)、当該第二判別手段による判別結果が安定の場合は、続いてコンピュータを第三判別手段又は第四判別手段として機能させ(ステップ4)、当該第三判別手段又は第四判別手段による判別結果が安定の場合は、コンピュータを前記正常終了手段と機能させ総合判別結果が安定であると判別し一連の安定判別方法を終了する(ステップ5)。
【0028】
また、当該前処理(ステップ1)で脱調と判定された場合や解析が異常終了した場合、乃至はステップ2〜4のいずれかで、不安定の判別結果が得られた場合は、コンピュータを前記異常終了手段として機能させ、総合判別結果として電力系統が不安定であると取り扱い当該一連の安定判別方法を終了する(ステップ6)。
【0029】
以下、各安定判別方法についてさらに詳しく説明する。前記第一安定判別手段は、入力手段が前記シミュレーションで得られた各発電機の状態を表す変数を入力データとして時系列で入力するステップと、演算手段が前記時系列の前半部及び後半部それぞれにおける前記入力データの振幅、すなわち最大値と最小値の差を算出するステップと、判別手段が前記前半部と後半部との振幅の比較結果を基準データとして電力系統の安定度の判別を行うステップとを行う第一安定判別方法を実施するものである。
【0030】
具体的には、例えば、各発電機の状態を表す変数として発電機角速度偏差を用い、図4にプロットされたような発電機角速度偏差波形について、波形の前半部の振幅A、及び波形の後半部の振幅BについてB/Aを算出し、B/Aがある閾値(例えば0.95)を超えた場合に不安定と判断すると共に、それ以外の場合は、安定と判断する。
【0031】
この方法は、設定を容易に行うことができ、また計算も単純であり高速に判別が可能であるという長所をもつ。一方、複数の動揺モードが干渉する中間領域の波形に対して、誤不動作を生ずる恐れがある。これを極力回避するためには、判別の閾値を小さくすることが考えられるが、誤動作が増加するため、あまり閾値を小さくすることはできない。また、急峻なスパイクのようなノイズがある場合は、誤判別の可能性が高くなるという欠点がある。
【0032】
なお、この例では、発電機角速度偏差波形について判別を行ったが、発電機内部相差角波形や、発電機加速エネルギー波形を用いて判別を行うことも可能である。
【0033】
第二安定判別手段は、入力手段が前記シミュレーションで得られた各発電機の状態を表す変数を入力データとして時系列で入力するステップと、演算手段が前記時系列の前半部及び後半部それぞれにおける入力データの波形の実効値を算出するステップと、判別手段が前記前半部と後半部との前記実効値の比較結果を基準データとして電力系統の安定度の判別を行うステップとを行う第二安定判別方法を実施するものである。
【0034】
具体的には、例えば、各発電機の状態を表す変数として発電機角速度偏差を用い、図4にプロットされたような発電機角速度偏差波形について、実効値に相当する数値の減衰傾向を判別するものである。具体的には、波形の前半部 (i=1とする)と後半部(i=2とする)それぞれにおいて(1)式によりWiを算出し、W2/W1がある閾値(例えば0.95)を超えた場合に不安定と判断すると共に、それ以外の場合は、安定と判断する。
【0035】
【数1】
【0036】
ti及びTには、一定の定数を用いても一応判別が可能であるが、より誤判別を少なくするために、tiとしては、波形がNavgを横切った瞬間、Tはtiから数周期後において波形がNavgを横切った瞬間となるように波形に応じて可変の値とすることも可能である。
【0037】
この方法は、第一安定判別方法の(ステップ2)と比較すれば、若干計算が複雑になるが、比較的単純であり高速に判別が可能であるという長所をもつ。また、スパイク状のノイズにも強い。一方、複数の動揺モードが干渉する中間領域の波形に対しては、前記第一安定判別方法と同様、誤不動作を生ずる恐れがある。
【0038】
なお、当該第二安定判別方法(ステップ3)においても、発電機内部相差角波形や、発電機加速エネルギー波形を用いて判別を行うことも可能である。
【0039】
前記第三安定判別手段は、入力手段が前記シミュレーションで得られた送電線両端の位相差及び各発電機の内部位相角を入力データとして時系列で入力するステップと、演算手段が前記送電線両端の位相差及び各発電機の内部位相角の自己回帰モデルの最適な次数とパラメータを設定するステップ、及び前記自己回帰モデルを用いて動揺モードの検出を行うステップと、判別手段が前記送電線両端の位相差及び各発電機の内部位相角の自己回帰モデルによる動揺モード検出結果を基準データとして安定度の判別を行うステップとを行う第三安定判別方法を実施するものである。
【0040】
当該第三安定判別方法は、前記演算手段による時系列解析によるものである。時系列解析とは、動揺する前記送電線両端の位相差及び各発電機の内部位相角の振動波形を、後述する次数の自動決定手法により、m次の自己回帰モデル((2)式参照)で表現して、得られた差分方程式をZ変換して得られる特性方程式((3)式参照)の特性根piを求めることで、動揺モードを検出する方法である。
【0041】
【数2】
【0042】
【数3】
【0043】
時系列解析の結果、共役複素根の特性根が存在する場合、その特性根で表現されるモードは振動的に変化する性質がある。さらにその共役複素根の絶対値が1より大きい場合、減衰率が正の不安定なモードが1つ存在し、絶対値が1より小さい場合は、減衰率が負の安定なモードが1つ存在する。絶対値がちょうど1の場合は、減衰率が0であり、持続振動となるモードが1つ存在する。一方、実根の特性根が存在する場合,その特性根で表現されるモードは一方向に単調に変化する性質がある。即ち、特性根が共役複素根のときに、その実部から動揺モードの減衰率が求まり,虚部から動揺モードの周期が求まることとなる。
【0044】
本発明では、系統状態や事故点などで大きく変化する動揺モードを精度よく検出するために、前記の如く自己回帰モデルの最適な次数とパラメータを自動設定する特徴を有する。この具体的な手順について以下に述べる。
【0045】
図5に示すフローチャートのように、まず、前記入力手段としての機能により時系列の入力データを取り込む。次に、前記演算手段としての機能によりモデルの次数を探索範囲内で順次更新しながら、各次数のモデルにおけるパラメータおよび赤池のFPE((4)式参照)を算出する。前記自己回帰モデルの次数を更新する探索範囲は、Nを時系列データ数として、1〜3√Nである。赤池のFPE((4)式参照)を用いて同定精度を診断し,赤池のFPEが最小となる次数の自己回帰モデルを用いて、動揺モードの解析を実施する。次に、検出された動揺モードを診断し、その変動量が時系列解析で得られる実根よりも大きく、且つその周期が、時系列の入力データのサンプリング時間の5倍から解析対象時間までの範囲にある動揺モードを有効な動揺モードと特定する。
【0046】
【数4】
【0047】
即ち、前記ステップ4の処理の全容は図6のようになる。まずシミュレーションで得られた送電線両端の位相差について、前記演算手段としての機能による時系列解析により動揺モードの検出を行い、不安定モードを特定する。次に各発電機の内部位相角の時系列データについても動揺モードの検出を行い、不安定モードを特定する。そして、前記判別手段の機能により上記動揺モード検出結果を基準データとして送電線の不安定モードと一致する不安定モードが発電機に存在する場合は不安定と判別し、存在しない場合は安定と判別する。
【0048】
また、送電線で減衰率が正の動揺モードが検出されない場合には安定と判別する代わりに、送電線で減衰率が正の動揺モードが検出されない場合、多数の発電機で検出される動揺モードの中に、減衰率が正で、送電線で検出される動揺モードと同一周期の動揺モードが存在すれば不安定と判別することで、誤不動作の抑制を図ることもできる。ただし、この論理を追加すると、誤動作が増加する傾向があるため、ステップ2乃至ステップ3の方法と組み合わせて判別を実施する場合は、この論理の追加は必要ない。
【0049】
当該ステップ4において採用される処理としては、以上述べたような時系列解析法を用いる代わりに、上記第三安定判別方法とは以下の点で異なる第四安定判別方法を用いることもできる。
【0050】
第四安定判別方法は、前記第三安定判別方法のステップに加え、前記演算手段が、前記自己回帰モデルにとって誤差の要因となる不要なデータを取り除くため、前記動揺モード検出の際に、前記自己回帰モデルの同定に用いるデータの時間領域の両端での値がそのデータの平均値に近づくように、前記時間領域の両端となる時刻を決定するステップを付加することができる。
【0051】
また、前記演算手段が、発散傾向のデータの判別精度を向上させるため、前記動揺モード検出の際に、図7のフローチャートに示すように、正方向で特定された動揺モードに加えて、逆方向で特定される動揺モードと照合するステップを加えることができる。具体的には、図7に示すフローチャートのように、送電線両端の位相差の時系列データから極めて減衰の悪い動揺モード(以下、動揺モードAと記す)が検出された場合、逆方向の時系列データを用いて動揺モードを検出する。前記動揺モードAと同一周期の逆方向の動揺モード(以下、動揺モードBと記す)が存在する場合は、この逆方向のデータから得られる動揺モードBの減衰率と元の動揺モードAの減衰率を比較し、同一の時間軸方向で見て、前者の減衰の方が悪ければ、前者の減衰率を用いて判別を行う。
【0052】
更に、前記演算手段が、自己回帰モデルの最適な次数を設定する際に、赤池のFPEによる基準値を評価関数として求められる次数が探索範囲の上限値となるとき、周期の重複した動揺モードが検出されて誤判別となることが多いため、その場合には、周期が重複する動揺モードがなくなるまで次数を低減するステップを加えることができる。
【0053】
具体的には、図8に示すフローチャートのように、周期の重複した動揺モード(以下,重複モードと記す)の数Nを算出し、2Nだけ次数を低減して再度動揺モード検出を実施する。その後、重複モードの有無を確認し、重複モードが無ければその動揺モードを採用、重複モードがあれば再度重複モードの数を算出して、先の手順に戻り、重複モードがなくなるまで繰り返す。
【0054】
最後にステップ5及び6では、ステップ2から4の判別結果を集約して最終判別結果を出力するが、当該例では、ステップ2から4のすべての判別結果が安定となった場合に限って、前記正常終了手段の機能により電力系統が安定であると判別され安定判別処理を終了するものであり、それ以外の場合、即ち、前記異常検出手段による前処理中に前記異常検出手段により脱調する発電機が有る場合や前記シミュレーションで前記変数を導く演算が収束せず異常終了した場合、或いは、前記第一安定判別手段乃至第三又は第四安定判別手段のいずれかの安定判別処理において不安定と判断された場合は、前記異常終了手段の機能により電力系統が不安定であると判別し安定判別処理を終了する。
【0055】
これは、例えば、この判別結果によって、系統安定化を実施する場合に、誤動作によって安定化制御が若干増加してしまうことは止むを得ないが、誤不動作によって系統が崩壊してしまう事態は許容しがたいために、このような方法を採っているものである。しかしながら、逆に誤不動作が許容される場合は、ステップ2から4のすべての判別が不安定となった場合に限って、総合判別が不安定となり、それ以外の場合を安定とする方法とすることも可能である。
【0056】
また、必ずしもステップ2から4の全てを実施する必要はなく、それぞれのステップを単独で用いて安定判別を実施すること、もしくは、任意の2つのステップを組み合わせて安定判別を実施することも、もちろん可能である。この場合は、必要に応じて閾値を厳しめの値とする等の対策により、誤不動作が生じないようにすることが可能である。
【0057】
さらに、図1のステップ2から4の実施順序は、必ずしもこの通りである必要はなく、例えばステップ4の一部(送電線の動揺モードチェック)のみを先に実施してこの収束性が良い場合は、安定と判別し、それ以外の場合について、ステップ2、3を実施するという方法も可能である。
【0058】
表1及び表2に、本発明による電力系統の安定判別方法を適用した結果の一例を示す。
表1は、図1における、ステップ1が終了した、総数251ケースのシミュレーション結果について図1における、ステップ2及び3を単独で適用した結果をまとめた例である。ステップ2、3では、誤不動作が少ない結果が得られる事がわかる。ただし、図3のような波形の判別は困難である。
【0059】
【表1】
表2は、図1における、ステップ1が終了した、総数251ケースのシミュレーション結果について図1における、ステップ4を単独で適用した結果をまとめた例である。ステップ4では、誤動作が少ない結果が得られる事がわかる。このため、ステップ2、3の判別と組み合わせて用いたとしても、総合判別において、誤動作が増加する恐れが少ない。
【0061】
【表2】
【発明の効果】
以上説明したように、前記第一安定判別方法及び第二安定判別方法によれば、複雑な振動を伴う動揺波形に対して、極端な誤判別の生じることがなく、かつ、閾値設定が容易であり、計算も比較的単純であり高速な安定判別が可能である。また、第三安定判別方法及び第四安定判別方法によれば、複数の動揺モードが干渉する中間領域の波形に対しても、極端な誤判別の生じない安定判別が可能である。さらに、それらを組み合わせる事で、誤不動作はせず、誤動作をできる限り抑制する電力系統の安定判別方法が得られる。
【図面の簡単な説明】
【図1】本発明による電力系統の安定判別方法の一例を示すフローチャートである。
【図2】複雑な振動を伴う動揺波形の例を示す図である。
【図3】複数の動揺モードが干渉する波形の例を示す図である。
【図4】図1中のステップ1の適用例の説明図である。
【図5】本発明による電力系統の安定判別方法における自己回帰モデルの次数を自動決定する手順を説明するフローチャートである。
【図6】図1中のステップ4の具体的な算出手順を説明するフローチャートである。
【図7】本発明による電力系統の安定判別方法における正方向と逆方向の時系列データから検出される動揺モードを照合する方法を説明するフローチャートである。
【図8】本発明による電力系統の安定判別方法における重複モードがなくなるまで次数を低減する手順を説明するフローチャートである。
Claims (6)
- 複数の発電機を含む電力系統において、想定した事故が発生した後の電力系統の動揺を一定の時間領域でシミュレーションした結果について、この電力系統の安定度をコンピュータにより判別する方法であって、
入力手段が前記シミュレーションで得られた各発電機の状態を表す変数を入力データとして時系列で入力するステップと、
演算手段が前記時系列の前半部及び後半部それぞれにおける前記入力データの振幅を算出するステップと、
判別手段が前記前半部と後半部との振幅の比較結果を基準データとして電力系統の安定度の判別を行うステップから構成されることを特徴とする電力系統の安定判別方法。 - 複数の発電機を含む電力系統において、想定した事故が発生した後の電力系統の動揺を一定の時間領域でシミュレーションした結果について、この電力系統の安定度をコンピュータにより判別する方法であって、
入力手段が前記シミュレーションで得られた各発電機の状態を表す変数を入力データとして時系列で入力するステップと、
演算手段が前記時系列の前半部及び後半部それぞれにおける入力データの波形の実効値を算出するステップと、
判別手段が前記前半部と後半部との前記実効値の比較結果を基準データとして電力系統の安定度の判別を行うステップから構成されることを特徴とする電力系統の安定判別方法。 - 複数の発電機を含む電力系統において、想定した事故が発生した後の電力系統の動揺を一定の時間領域でシミュレーションした結果について、この電力系統の安定度をコンピュータにより判別する方法であって、
入力手段が前記シミュレーションで得られた送電線両端の位相差及び各発電機の内部位相角を入力データとして時系列で入力するステップと、
演算手段が前記送電線両端の位相差及び各発電機の内部位相角の自己回帰モデルの最適な次数とパラメータを設定すると共に、前記自己回帰モデルを用いて動揺モードの検出を行うステップと、
判別手段が前記送電線両端の位相差及び各発電機の内部位相角の自己回帰モデルによる動揺モード検出結果を基準データとして安定度の判別を行うステップから構成されることを特徴とする電力系統の安定判別方法。 - 前記演算手段が、前記動揺モード検出の際に、前記自己回帰モデルの同定に用いる前記入力データの時間領域の両端での値がその入力データの平均値に近づくように、前記時間領域の両端となる時刻を決定するステップと、前記演算手段が、前記動揺モード検出の際に、逆時系列による入力データから検出される動揺モードと照合するステップと、前記演算手段が、前記自己回帰モデルの最適な次数を設定する際に、次数が探索範囲の上限値となるとき、周期が重複する動揺モードがなくなるまで次数を低減するステップとから構成されることを特徴とする請求項3に記載された電力系統の安定判別方法。
- 前記請求項1、請求項2、請求項3又は請求項4の電力系統の安定判別方法のうちの少なくとも二つの安定判別方法を併用し、正常終了手段が、併用された少なくとも二つの判別結果の論理積を判別結果とするステップを備えることを特徴とする電力系統の安定判別方法。
- 複数の発電機を含む電力系統において、想定した事故が発生した後の電力系統の動揺を一定の時間領域でシミュレーションした結果について、この電力系統の安定度を自動判別するために、コンピュータを、
前記シミュレーションにおける解析対象時間内の結果に脱調する発電機を検出する異常検出手段、
前記シミュレーションで得られた各発電機の状態を表す変数を入力データとして時系列で入力し、前記時系列の前半部及び後半部それぞれにおける前記入力データの振幅を算出し、前記前半部と後半部との振幅の比較結果を基準データとして電力系統の安定度の判別を行う第一安定判別手段、
前記シミュレーションで得られた各発電機の状態を表す変数を入力データとして時系列で入力し、前記時系列の前半部及び後半部それぞれにおける入力データの波形の実効値を算出し、前記前半部と後半部との前記実効値の比較結果を基準データとして電力系統の安定度の判別を行う第二安定判別手段、
前記シミュレーションで得られた送電線両端の位相差及び各発電機の内部位相角を入力データとして時系列で入力し、前記送電線両端の位相差及び各発電機の内部位相角の自己回帰モデルの最適な次数とパラメータを設定し、前記自己回帰モデルを用いて動揺モードの検出を行い、前記送電線両端の位相差及び各発電機の内部位相角の自己回帰モデルによる動揺モード検出結果を基準データとして安定度の判別を行う第三安定判別手段、
当該第三安定判別手段において、前記動揺モード検出の際に、前記自己回帰モデルの同定に用いる前記入力データの時間領域の両端での値がその入力データの平均値に近づくように、前記時間領域の両端となる時刻を決定し、前記動揺モード検出の際に、逆時系列による入力データから検出される動揺モードと照合し、前記自己回帰モデルの最適な次数を設定する際に、次数が探索範囲の上限値となるとき、周期が重複する動揺モードがなくなるまで次数を削減する第四安定判別手段、
前記第一安定判別手段及び第二安定判別手段並びに第三安定判別手段又は第四安定判別手段のいずれかの安定判別処理において安定と判別された場合に電力系統が安定であると判別し安定判別処理を終了する正常終了手段、
前記シミュレーションにおける一定の時間領域内に前記異常検出手段により脱調する発電機が有る場合や前記シミュレーションで前記変数を導く演算が収束せずに異常終了した場合、或いは、前記第一安定判別手段乃至第四安定判別手段のいずれかの安定判別処理において不安定と判断された場合に、電力系統が不安定であると判別し安定判別処理を終了する異常終了手段として機能させるための電力系統の安定判別用プログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003069925A JP2004282882A (ja) | 2003-03-14 | 2003-03-14 | 電力系統の安定判別方法及びそのプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003069925A JP2004282882A (ja) | 2003-03-14 | 2003-03-14 | 電力系統の安定判別方法及びそのプログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004282882A true JP2004282882A (ja) | 2004-10-07 |
Family
ID=33286804
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003069925A Pending JP2004282882A (ja) | 2003-03-14 | 2003-03-14 | 電力系統の安定判別方法及びそのプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004282882A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006081301A (ja) * | 2004-09-09 | 2006-03-23 | Central Res Inst Of Electric Power Ind | 電力系統の脱調防止制御方法および装置並びにプログラム |
| JP2006101619A (ja) * | 2004-09-29 | 2006-04-13 | Hitachi Ltd | 電力系統の安定度診断装置、電力系統安定化装置および電力系統縮約支援装置 |
| WO2006090538A1 (ja) * | 2005-02-22 | 2006-08-31 | Kyushu Institute Of Technology | 電力系統の系統安定度制御方法及びシステム |
| JP2009044857A (ja) * | 2007-08-08 | 2009-02-26 | Hitachi Ltd | 電力系統の安定度診断装置および方法 |
| KR101277141B1 (ko) | 2012-10-31 | 2013-06-20 | 네오피스 주식회사 | 전자식 전력량계와 이의 배전계통 감시방법 |
-
2003
- 2003-03-14 JP JP2003069925A patent/JP2004282882A/ja active Pending
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006081301A (ja) * | 2004-09-09 | 2006-03-23 | Central Res Inst Of Electric Power Ind | 電力系統の脱調防止制御方法および装置並びにプログラム |
| JP2006101619A (ja) * | 2004-09-29 | 2006-04-13 | Hitachi Ltd | 電力系統の安定度診断装置、電力系統安定化装置および電力系統縮約支援装置 |
| WO2006090538A1 (ja) * | 2005-02-22 | 2006-08-31 | Kyushu Institute Of Technology | 電力系統の系統安定度制御方法及びシステム |
| JPWO2006090538A1 (ja) * | 2005-02-22 | 2008-07-24 | 国立大学法人九州工業大学 | 電力系統の系統安定度制御方法及びシステム |
| US7966101B2 (en) | 2005-02-22 | 2011-06-21 | Kyushu Institute Of Technology | Method and system for controlling stability of electric power system |
| JP2009044857A (ja) * | 2007-08-08 | 2009-02-26 | Hitachi Ltd | 電力系統の安定度診断装置および方法 |
| KR101277141B1 (ko) | 2012-10-31 | 2013-06-20 | 네오피스 주식회사 | 전자식 전력량계와 이의 배전계통 감시방법 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Grippo et al. | Nonmonotone globalization techniques for the Barzilai-Borwein gradient method | |
| Jeannet et al. | Symbolic test selection based on approximate analysis | |
| GB2604791A (en) | Adding adversarial robustness to trained machine learning models | |
| CN105072095B (zh) | 一种检测sql注入漏洞的方法及装置 | |
| Hassan et al. | Incremental, inductive CTL model checking | |
| CN108052825A (zh) | 针对二进制可执行文件的模糊测试与符号执行相结合的漏洞检测系统 | |
| Könighofer et al. | Debugging formal specifications using simple counterstrategies | |
| Ramirez et al. | Automatic derivation of utility functions for monitoring software requirements | |
| JP2004282882A (ja) | 電力系統の安定判別方法及びそのプログラム | |
| CN114416464B (zh) | 一种可信进程的监管方法及存储介质 | |
| Kuehlmann et al. | Probabilistic state space search | |
| CN113852364B (zh) | 边界信号的产生和检测方法、产生系统和割草机器人 | |
| Kalech et al. | Diagnosing a team of agents: Scaling-up | |
| CN119862059A (zh) | 一种分布式系统故障智能化处理方法、装置、计算机可读存储介质及电子设备 | |
| KR102242937B1 (ko) | 회귀 분석 장치 및 회귀 분석 장치를 생성하는 방법 | |
| CN110334244B (zh) | 一种数据处理的方法、装置及电子设备 | |
| CN111488551A (zh) | 验证卷积运算的完整性的方法及装置 | |
| CN116316536A (zh) | 一种电力电子设备的同步稳定性评估方法及系统 | |
| CN116719685A (zh) | 芯片瞬态故障下的功能安全测试方法、装置及设备 | |
| CN111797990A (zh) | 机器学习模型的训练方法、训练装置和训练系统 | |
| Zhang et al. | Fast generic model-checking for data-based systems | |
| Siirtola | Parametrised interface automata | |
| El-Fakih et al. | On studying the effectiveness of extended finite state machine based test selection criteria | |
| CN110529203A (zh) | 一种汽机超速保护系统及其控制方法 | |
| Kaijian et al. | Research on parallel deep learning for heterogeneous computing architecture |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20051101 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20070514 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070522 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20070925 |