JP2004279049A - カメラ位置算出システム - Google Patents
カメラ位置算出システム Download PDFInfo
- Publication number
- JP2004279049A JP2004279049A JP2003066883A JP2003066883A JP2004279049A JP 2004279049 A JP2004279049 A JP 2004279049A JP 2003066883 A JP2003066883 A JP 2003066883A JP 2003066883 A JP2003066883 A JP 2003066883A JP 2004279049 A JP2004279049 A JP 2004279049A
- Authority
- JP
- Japan
- Prior art keywords
- marker
- camera
- holding
- difference
- parameter
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images









Landscapes
- Length Measuring Devices By Optical Means (AREA)
Abstract
【解決手段】マーカ認識部131はカメラ120による撮像画像からマーカ110を認識する。カメラパラメータ保持部132はカメラ位置を特定するための複数のパラメータを保持する。カメラパラメータ変換部133はパラメータを各々一定の範囲で変化させる。マーカ位置算出部135はマーカ座標保持部134に保持されているマーカ座標値に基づいてパラメータで特定される位置から見たマーカ座標値を算出する。差分算出部136は算出された座標値と認識されたマーカ座標値との差分値を算出する。差分結果保持部137は算出された差分値を保持する。近似部138は変化させた個数分の差分値から差分値の変化する様子を近似関数で近似し、認識されたマーカ座標値に算出される座標値が最も近くなるようなパラメータを求める。
【選択図】 図1
Description
【発明の属する技術分野】
本発明は、計測等の対象となる物体を中心とした座標上におけるカメラの位置を求めるカメラ位置算出システムに関するものである。
【0002】
【従来の技術】
図9は従来のカメラ位置算出システムの構成を示すブロック図、図10は図9に示すカメラ位置算出システムの原理説明図である。図9に示すように、従来のカメラ位置算出システムは、カメラ101と、画像処理部102と、位置計算部103とを備えている。図10に示すように、カメラ101は焦点Fcの位置から基準物体105を撮像する。平面Pは、カメラ101の光軸と垂直な3次元空間中の平面である。
【0003】
基準物体105上の点、V1,V2,V3,V4の位置関係が既知であれば、焦点Fcの位置が決まった段階で、これらの点と焦点Fcを結んだ直線と、平面Pの交点、S1’,S2’,S3’,S4’を求めることができる。このとき、三角形FcS1’S2’と三角形FcS1S2、三角形FcS3’S4’と三角形FcS3S4はそれぞれ相似であるため、式(1)がなりたつ。しかし、S1,・・・,S4は画像上の点であるため整数で表されている。このため、実際には式(2)のようになる。
【0004】
【数1】

一方、焦点Fcの位置が変化すると、D11/D34の値と、D12’/D34’の値は大きくずれてしまう。
そこで、式(3)を考え、空間中での焦点Fcの位置を変えながら、Kの値が最小になる焦点Fcの位置を求め、これをカメラの位置とする。(例えば特許文献1参照)。
【0006】
【数2】
【特許文献1】
特開平07−159167号公報(第4頁、図1、図2)
【0008】
【発明が解決しようとする課題】
しかしながら、従来のカメラ位置算出装置においては、焦点Fcの最適値を探索することが容易ではない。すなわち、カメラの位置は、並進成分と回転成分それぞれ3個、合計6個のパラメータによって特定され、これらのパラメータを少しずつ変化させながら、式(3)のKを最小にする値を探索することによって求められるため、焦点Fcの位置を非常に多く変える必要がある。このため、カメラの位置を数多く変化させなければ、カメラの正しい位置を求めることができなかった。
【0009】
本発明は、このような従来の技術の問題点を解決するために創案されたものであり、その目的は、カメラの位置を数多く変化させなくても、カメラの正しい位置を求めることができるカメラ位置算出システムを提供することにある。
【0010】
【課題を解決するための手段】
上記目的を達成するために本発明は、所定の位置に設置されたマーカと、前記マーカを撮像する撮像手段と、前記撮像手段の位置を算出するカメラ位置算出装置とを備えたカメラ位置算出システムにおいて、前記カメラ位置算出装置は、前記撮像手段による撮像画像から前記マーカを認識するマーカ認識手段と、前記撮像手段の位置を特定するための複数のパラメータを保持するカメラパラメータ保持手段と、前記カメラパラメータ保持手段に保持されているパラメータをパラメータ毎に一定の範囲で変化させるカメラパラメータ変換手段と、前記マーカが設置されている位置の座標値を保持するマーカ座標保持手段と、前記マーカ座標保持手段に保持されている座標値に基づいて、前記カメラパラメータ保持手段に保持されているパラメータで特定される撮像手段の位置から見た場合の前記マーカの座標値を算出するマーカ位置算出手段と、前記マーカ位置算出手段により算出された座標値と、前記マーカ認識手段により認識された前記マーカの座標値との差分値を算出する差分算出手段と、前記差分算出手段により算出された差分値を保持する差分結果保持手段と、前記差分結果保持手段に保持されている、前記カメラパラメータ変換手段により変化させた個数分の差分値から、差分値の変化する様子を近似関数で近似し、前記マーカ認識手段により認識された前記マーカの座標値に、前記マーカ位置算出手段により算出される座標値が最も近くなるような、前記パラメータ保持手段の保持するカメラパラメータを求める近似手段と、を有して構成される。
【0011】
この構成により、撮像手段の位置を数多く変化させなくても撮像手段の正しい位置を求めることができる。
【0012】
また、本発明のカメラ位置算出装置において、前記近似手段は、係数を算出する係数算出手段と、前記係数算出手段により算出された係数から得られる評価関数を保持する評価関数保持手段と、前記評価関数保持手段の保持する評価関数の極小値を求める微分値算出手段と、を有して構成されることが望ましい。
【0013】
この構成により、撮像手段の位置を一定の範囲で移動させた結果を2次曲面で近似することにより撮像手段の正しい位置を求めることができる。
【0014】
また、本発明のカメラ位置算出システムにおいて、前記カメラ位置算出装置は、前記差分結果保持手段の保持する差分値を比較する差分結果比較手段と、前記カメラパラメータ保持手段に保持しているパラメータの種別を保持するパラメータ種保持手段と、前記カメラパラメータ変換手段の変換する際のパラメータの変換幅を保持する変換幅保持手段と、前記差分結果比較手段による比較結果に応じて前記変換幅を変更する変換幅変更手段とを有して構成されることが望ましい。
【0015】
この構成により、撮像手段の当初の位置が正しい位置から大きくずれていても、少ない計算量で撮像手段の正しい位置を求めることができる。
【0016】
【発明の実施の形態】
以下、本発明の実施の形態について、図面を用いて説明する。
【0017】
図1は、本発明の第1の実施の形態の構成を示すブロック図である。このカメラ位置算出システム100は、所定の位置に設置されたマーカ110と、マーカ110を撮像するカメラ120と、カメラ120の位置を算出するカメラ位置算出装置130とを備えて構成される。
【0018】
カメラ位置算出装置130は、マーカ認識部131、カメラパラメータ保持部132、カメラパラメータ変換部133、マーカ座標保持部134、マーカ位置算出部135、差分算出部136、差分結果保持部137、近似部138、および値保持部139を有して構成される。
【0019】
マーカ認識部131は、カメラ120による撮像画像からマーカ110を認識する。
カメラパラメータ保持部132は、カメラ110の位置を特定するための複数のパラメータを保持する。パラメータは、マーカ110とカメラ110との位置関係を表す。
カメラパラメータ変換部133は、カメラパラメータ保持部132に保持されているパラメータをパラメータ毎に一定の範囲で変化させる。
マーカ座標保持部134は、マーカ110が設置されている位置の座標値を保持する。
マーカ位置算出部135は、マーカ座標保持部135に保持されている座標値に基づいて、カメラパラメータ保持部132に保持されているパラメータで特定される位置から見た場合のマーカ110の座標値(マーカ位置)を算出する。
差分算出部136は、マーカ位置算出部135により算出された座標値と、マーカ認識部131により認識されたマーカ1の座標値との差分値すなわち距離を算出する。
差分結果保持部137は、差分算出部136により算出された差分値を保持する。
近似部138は、差分結果保持137に保持されている、カメラパラメータ変換部133により変化させた個数分の差分値から、差分値の変化する様子を近似関数で近似し、マーカ認識部131により認識されたマーカの座標値に、マーカ位置算出部135により算出される座標値が最も近くなるような、パラメータ保持部132の保持するパラメータを求める。
値保持部139は、近似部138により求められた結果を保持する。
【0020】
図2は図1中の近似部138の構成例を示すブロック図である。図示するように、近似部138は、係数算出部201と、評価関数保持部202と、微分値算出部203とを備えている。
【0021】
係数算出部201は、下記の式(4)で表される評価関数の係数(a,b,c,e,f,g,h,i,j,k,m)を算出する。
評価関数保持部202は、係数算出部201により算出された係数から得られる評価関数を保持する。
微分値算出部203は、評価関数保持部202に保持されている評価関数の極小値を求める。
【0022】
【数3】
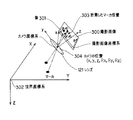
次に、第1の実施の形態のシステムによるカメラ位置算出原理について、図3を参照して説明する。
【0024】
図3において、マーカ110を撮像すると、カメラ120のレンズ121を通して、撮像画像300の上に像301が結ばれる。
一方、世界座標系302におけるマーカ110の位置とカメラ120の位置がわかっていれば、マーカ110が撮像画像300のどこに撮像されるかが計算できる。計算したマーカ位置303の座標値を(p‘、q’)とする。カメラ120とマーカ110の位置関係が正しければ、像301と計算したマーカ位置303は一致する。しかし、カメラ120の位置がずれていると像301と計算したマーカ位置303がずれてしまう。このときのずれの程度を下記の式(5)で表す。
【0025】
【数4】
カメラ120の世界座標系302における位置304は、レンズ121の中心位置(x、y、z)と光軸の方向(Rx,Ry,Rz)とにより表される。中心位置(x、y、z)や光軸の方向(Rx,Ry,Rz)を変化させると、式(5)で表される評価値Vは変化する。
【0027】
カメラ120の位置304が正しい位置に近ければ、レンズ121の中心位置(x、y、z)や光軸の方向(Rx,Ry,Rz)を変化させたときにおける、角度のずれとずれの度合いとの関係は図4のようになる。図4では、中心位置xを変化させたときの計算結果を破線で示している。この破線は、2次関数で補間することが可能で、これを図4の実線に示す。
【0028】
6個のパラメータについては、式(4)に示す評価関数で補間することができる。式(4)の係数(a,b,c,e,f,g,h,i,j,k,m)は、現時点のカメラ120の位置304を中心にして、カメラ120の位置304のパラメータ(x、y、z、Rx、Ry、Rz)を変化させた値から、最小二乗法などを用いることにより求めることができる。Qを最小とする6個のパラメータ(x、y、z、Rx、Ry、Rz)が求めるカメラの位置である。これは、Qの極小値を求めることによって求めることができる。
【0029】
上記のように、カメラ120の位置を一定の範囲で移動させた結果を2次曲面で近似することにより、カメラ120の正しい位置を求めることができる。
【0030】
図5は本発明の第2の実施の形態の構成を示すブロック図である。第2の実施の形態のカメラ位置算出装置140は、図1の構成に加えて、差分結果比較部141と、パラメータ種保持部142と、変換幅保持部143と、変換幅変更部144とを備えている。
【0031】
差分結果比較部141は、差分結果保持部137に保持されている差分値を比較する。
パラメータ種保持部142は、カメラパラメータ保持部132に保持されているパラメータの種別を保持しており、カメラパラメータ変換部133がパラメータの値を変える際のパラメータの種別をひとつずつ変えていく。
変換幅保持部143には、カメラパラメータ変換部133がパラメータを変換する際の変換幅が保持されている。
変換幅変更部144は、差分結果比較部141による比較結果に応じて、前記変換幅を変更する。具体的には、計算したマーカ位置303と撮像された像301との差分値が大きいほどパラメータの変換幅を大きな値に変更し、差分値が小さいほどパラメータの変換幅を小さな値に変更する。
【0032】
次に、第2の実施の形態の作用について、図6を参照して説明する。
図6では、カメラ120の位置が実際の位置とかなりずれているため、計算したマーカ位置303が撮像された像301の位置からかなりずれている。この場合は、フロー71に示すように、撮像された像301の位置に近づいていく。この際、カメラ120の位置を特定するパラメータを1種類ずつ変えながら、式(5)の評価値Vが小さくなる方向に進んでいく。
【0033】
そして、撮像された点301の位置に近づいた時点で、第1の実施の形態の場合と同様に、カメラ120の位置を構成するパラメータを変え、その結果を2次関数で近似して最適な値を求める。
【0034】
フロー71のように大まかに近づいていくときは、まず、パラメータの種類をひとつ決定し、この種別をパラメータ種保持部142に記録する。そして、カメラパラメータ変換部133によって、パラメータを変えながら評価値Vが最も小さくなるまで進んでいく。
【0035】
あるパラメータについて評価値Vを最小とする値が求められたら、パラメータを変えて同じ操作を繰り返す。すべてのパラメータについて最小となる評価値Vが求められた後は、その値を中心として、第1の実施の形態で述べた方法によって、最適な値を求める。
【0036】
上記のように、第2の実施の形態によれば、計算したマーカ位置303と撮像された像301との差分値が大きいほど、すなわち両者間の距離が大きいほどパラメータの変換幅を大きな値に変更し、差分値が小さいほど、すなわち両者間の距離が小さいほどパラメータの変換幅を小さな値に変更することにより、カメラ120の当初の位置が正しい位置から大きくずれていても、少ない計算量でカメラ120の正しい位置を求めることができる。
【0037】
図7は本発明の第3の実施の形態の構成を示すブロック図である。第3の実施の形態のカメラ位置算出システムは、2台のカメラ401、402を備えている。カメラ位置算出装置130の構成は、図1のシステムと同様である。
【0038】
2台のカメラ401、402は、図8に示すように、カメラユニット400として結合されている。カメラユニット400は、2つのカメラ401、402のレンズ401a、402aの中心を結んだ線の中点を回転中心410として回転(自転)する。カメラユニット400は剛体として移動や回転を行うので、カメラユニット400の回転中心410の位置が決まれば、2つのカメラ401、402の位置も決定することができる。また、そのとき、マーカ110が撮像画像のどこに撮像されるかも計算することができる。したがって、それぞれのカメラ401、402の撮像された位置(p、q)と計算された位置(p‘、q’)を用いれば、式(5)により評価値Vを計算することができる。以降は、第1の実施の形態と同様にして、カメラユニット400の位置を求めることができる。
【0039】
このように、本発明のカメラ位置算出システムは、複数のカメラを備えたシステムにも有効に適用できる。
【0040】
なお、マーカ110は、位置が認識できるものであれば特別の色や形を有している必要はなく、撮像領域内に存在する任意の静止物体の輪郭部などをマーカ110として利用することもできる。
【0041】
【発明の効果】
以上説明したように、本発明のカメラ位置算出システムによれば、カメラの位置を数多く変化させなくてもよいので、カメラの正しい位置を少ない計算量で求めることができる。
【図面の簡単な説明】
【図1】本発明の第1の実施の形態におけるカメラ位置算出システムの構成を示すブロック図である。
【図2】本発明の第1の実施の形態における近似部の構成を示すブロック図である。
【図3】本発明の第1の実施の形態の原理説明図である。
【図4】カメラのレンズの中心位置や光軸の方向を変化させたときにおける、角度のずれとずれの度合いとの関係をグラフに示した図である。
【図5】本発明の第2の実施の形態におけるカメラ位置算出システムの構成を示すブロック図である。
【図6】本発明の第2の実施の形態の動作説明図である。
【図7】本発明の第3の実施の形態におけるカメラ位置算出システムの構成を示すブロック図である。
【図8】本発明の第3の実施の形態の動作説明図である。
【図9】従来のカメラ位置算出システムのブロック図である。
【図10】従来のカメラ位置算出システムのの動作説明図である。
【符号の説明】
100:カメラ位置算出システム
110:マーカ
120:カメラ(撮像手段)
121:レンズ
130:カメラ位置算出装置
131:マーカ認識部(マーカ認識手段)
132:カメラパラメータ保持部(カメラパラメータ保持手段)
133:カメラパラメータ変換部(カメラパラメータ変換手段)
134:マーカ座標保持部(マーカ座標保持手段)
135:マーカ位置算出部(マーカ位置算出手段)
136:差分算出部(差分算出手段)
137:差分結果保持部(差分結果保持手段)
138:近似部(近似手段)
139:値保持部(結果保持手段)
140:カメラ位置算出装置
141:差分結果比較部(差分結果比較手段)
142:パラメータ種保持部(パラメータ種保持手段)
143:変換幅保持部(変換幅保持手段)
144:変換幅変更部(変換幅変更手段)
201:係数算出部(係数算出手段)
202:評価関数保持部(評価関数保持手段)
203:微分値算出部(微分値算出手段)
300:撮像画像
301:像
302:世界座標系
303:マーカ位置
401:カメラ(撮像手段)
402:カメラ(撮像手段)
400:カメラユニット
401a:レンズ
402a:レンズ
410:回転中心
Claims (3)
- 所定の位置に設置されたマーカと、
前記マーカを撮像する撮像手段と、
前記撮像手段の位置を算出するカメラ位置算出装置とを備えたカメラ位置算出システムにおいて、
前記カメラ位置算出装置は、
前記撮像手段による撮像画像から前記マーカを認識するマーカ認識手段と、
前記撮像手段の位置を特定するための複数のパラメータを保持するカメラパラメータ保持手段と、
前記カメラパラメータ保持手段に保持されているパラメータをパラメータ毎に一定の範囲で変化させるカメラパラメータ変換手段と、
前記マーカが設置されている位置の座標値を保持するマーカ座標保持手段と、
前記マーカ座標保持手段に保持されている座標値に基づいて、前記カメラパラメータ保持手段に保持されているパラメータで特定される撮像手段の位置から見た場合の前記マーカの座標値を算出するマーカ位置算出手段と、
前記マーカ位置算出手段により算出された座標値と、前記マーカ認識手段により認識された前記マーカの座標値との差分値を算出する差分算出手段と、
前記差分算出手段により算出された差分値を保持する差分結果保持手段と、
前記差分結果保持手段に保持されている、前記カメラパラメータ変換手段により変化させた個数分の差分値から、差分値の変化する様子を近似関数で近似し、前記マーカ認識手段により認識された前記マーカの座標値に、前記マーカ位置算出手段により算出される座標値が最も近くなるような、前記パラメータ保持手段の保持するカメラパラメータを求める近似手段と、
前記近似手段により求められた結果を保持する値保持手段と、
を有するカメラ位置算出システム。 - 前記近似手段は、
係数を算出する係数算出手段と、
前記係数算出手段により算出された係数から得られる評価関数を保持する評価関数保持手段と、
前記評価関数保持手段の保持する評価関数の極小値を求める微分値算出手段と、
を有することを特徴とする請求項1記載のカメラ位置算出システム。 - 前記カメラ位置算出装置は、
前記差分結果保持手段に保持されている差分値を比較する差分結果比較手段と、
前記カメラパラメータ保持手段に保持されているパラメータの種別を保持するパラメータ種保持手段と、
前記カメラパラメータ変換手段によるカメラパラメータの変換幅を保持する変換幅保持手段と、
前記差分結果比較手段による比較結果に応じて前記変換幅を変更する変換幅変更手段と、
を有することを特徴とする請求項1または2記載のカメラ位置算出システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003066883A JP2004279049A (ja) | 2003-03-12 | 2003-03-12 | カメラ位置算出システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003066883A JP2004279049A (ja) | 2003-03-12 | 2003-03-12 | カメラ位置算出システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004279049A true JP2004279049A (ja) | 2004-10-07 |
Family
ID=33284654
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003066883A Pending JP2004279049A (ja) | 2003-03-12 | 2003-03-12 | カメラ位置算出システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004279049A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007148688A (ja) * | 2005-11-25 | 2007-06-14 | Nippon Telegr & Teleph Corp <Ntt> | 情報検索方法及び装置及びコンピュータ読み取り可能な記録媒体 |
| JP2008275340A (ja) * | 2007-04-25 | 2008-11-13 | Canon Inc | 情報処理装置、情報処理方法 |
| US12025423B2 (en) | 2019-01-23 | 2024-07-02 | Socionext Inc. | Camera information calculation device and system |
| JP2025023788A (ja) * | 2023-08-04 | 2025-02-17 | ▲啓▼碁科技股▲ふん▼有限公司 | 画像品質評価システム及び画像品質評価方法 |
-
2003
- 2003-03-12 JP JP2003066883A patent/JP2004279049A/ja active Pending
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007148688A (ja) * | 2005-11-25 | 2007-06-14 | Nippon Telegr & Teleph Corp <Ntt> | 情報検索方法及び装置及びコンピュータ読み取り可能な記録媒体 |
| JP2008275340A (ja) * | 2007-04-25 | 2008-11-13 | Canon Inc | 情報処理装置、情報処理方法 |
| US12025423B2 (en) | 2019-01-23 | 2024-07-02 | Socionext Inc. | Camera information calculation device and system |
| JP2025023788A (ja) * | 2023-08-04 | 2025-02-17 | ▲啓▼碁科技股▲ふん▼有限公司 | 画像品質評価システム及び画像品質評価方法 |
| JP7754913B2 (ja) | 2023-08-04 | 2025-10-15 | ▲啓▼碁科技股▲ふん▼有限公司 | 画像品質評価システム及び画像品質評価方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3539788B2 (ja) | 画像間対応付け方法 | |
| US20090102840A1 (en) | System and method for 3d measurement and surface reconstruction | |
| CN111060006B (zh) | 一种基于三维模型的视点规划方法 | |
| RU2001101469A (ru) | Получение трехмерных планов одной ручной съемочной камерой | |
| JP2963990B1 (ja) | 距離計測装置及び方法並びに画像復元装置及び方法 | |
| WO2014061372A1 (ja) | 画像処理装置、画像処理方法および画像処理プログラム | |
| JP2010041417A (ja) | 画像処理装置、画像処理方法、画像処理プログラム、及び、撮像装置 | |
| JP2010276433A (ja) | 撮像装置、画像処理装置及び距離計測装置 | |
| CN108629756A (zh) | 一种Kinect v2深度图像无效点修复方法 | |
| CN107084680A (zh) | 一种基于机器单目视觉的目标深度测量方法 | |
| JPH10269362A (ja) | 物体認識方法およびその装置 | |
| Grest et al. | Single view motion tracking by depth and silhouette information | |
| CN110348351B (zh) | 一种图像语义分割的方法、终端和可读存储介质 | |
| CN111833392A (zh) | 标记点多角度扫描方法、系统及装置 | |
| Yamaguti et al. | A method of distance measurement by using monocular camera | |
| CN117115242B (zh) | 标志点的识别方法、计算机存储介质和终端设备 | |
| JP4209637B2 (ja) | 監視システムの距離補正装置および距離補正方法 | |
| CN116468764A (zh) | 基于超点空间引导的多视图工业点云高精度配准系统 | |
| JP2004279049A (ja) | カメラ位置算出システム | |
| Dai et al. | High-accuracy calibration for a multiview microscopic 3-D measurement system | |
| CN109636903B (zh) | 一种基于抖动的双目三维重建方法 | |
| CN119832151A (zh) | 开放式三维重建方法、自动深度定位方法、设备及机器人 | |
| JPH1055446A (ja) | 物体認識装置 | |
| JP6080424B2 (ja) | 対応点探索装置、そのプログラムおよびカメラパラメータ推定装置 | |
| JP2010041416A (ja) | 画像処理装置、画像処理方法、画像処理プログラム、及び、撮像装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060126 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20060325 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20071011 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20071017 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20071114 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20071121 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20071128 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20071205 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20071212 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20080227 |