FR3064738A1 - Turbomachine et procede de controle d'etancheite a capteurs capacitifs - Google Patents
Turbomachine et procede de controle d'etancheite a capteurs capacitifs Download PDFInfo
- Publication number
- FR3064738A1 FR3064738A1 FR1752655A FR1752655A FR3064738A1 FR 3064738 A1 FR3064738 A1 FR 3064738A1 FR 1752655 A FR1752655 A FR 1752655A FR 1752655 A FR1752655 A FR 1752655A FR 3064738 A1 FR3064738 A1 FR 3064738A1
- Authority
- FR
- France
- Prior art keywords
- sensors
- targets
- fixed part
- fixed
- axial
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000007789 sealing Methods 0.000 title claims description 11
- 238000000034 method Methods 0.000 title claims description 8
- 238000006073 displacement reaction Methods 0.000 claims abstract description 21
- 238000005259 measurement Methods 0.000 claims description 25
- 238000000576 coating method Methods 0.000 claims description 17
- 238000013519 translation Methods 0.000 claims description 9
- 230000000295 complement effect Effects 0.000 claims description 5
- 239000012530 fluid Substances 0.000 claims description 3
- 239000011248 coating agent Substances 0.000 description 4
- 239000000463 material Substances 0.000 description 3
- 238000011144 upstream manufacturing Methods 0.000 description 3
- 230000010354 integration Effects 0.000 description 2
- 238000012360 testing method Methods 0.000 description 2
- 244000124209 Crocus sativus Species 0.000 description 1
- 238000011088 calibration curve Methods 0.000 description 1
- 239000003795 chemical substances by application Substances 0.000 description 1
- 238000002485 combustion reaction Methods 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 239000004020 conductor Substances 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000003071 parasitic effect Effects 0.000 description 1
- 239000011343 solid material Substances 0.000 description 1
Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B7/00—Measuring arrangements characterised by the use of electric or magnetic techniques
- G01B7/02—Measuring arrangements characterised by the use of electric or magnetic techniques for measuring length, width or thickness
- G01B7/023—Measuring arrangements characterised by the use of electric or magnetic techniques for measuring length, width or thickness for measuring distance between sensor and object
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F01—MACHINES OR ENGINES IN GENERAL; ENGINE PLANTS IN GENERAL; STEAM ENGINES
- F01D—NON-POSITIVE DISPLACEMENT MACHINES OR ENGINES, e.g. STEAM TURBINES
- F01D11/00—Preventing or minimising internal leakage of working-fluid, e.g. between stages
- F01D11/08—Preventing or minimising internal leakage of working-fluid, e.g. between stages for sealing space between rotor blade tips and stator
- F01D11/12—Preventing or minimising internal leakage of working-fluid, e.g. between stages for sealing space between rotor blade tips and stator using a rubstrip, e.g. erodible. deformable or resiliently-biased part
- F01D11/122—Preventing or minimising internal leakage of working-fluid, e.g. between stages for sealing space between rotor blade tips and stator using a rubstrip, e.g. erodible. deformable or resiliently-biased part with erodable or abradable material
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F01—MACHINES OR ENGINES IN GENERAL; ENGINE PLANTS IN GENERAL; STEAM ENGINES
- F01D—NON-POSITIVE DISPLACEMENT MACHINES OR ENGINES, e.g. STEAM TURBINES
- F01D11/00—Preventing or minimising internal leakage of working-fluid, e.g. between stages
- F01D11/08—Preventing or minimising internal leakage of working-fluid, e.g. between stages for sealing space between rotor blade tips and stator
- F01D11/14—Adjusting or regulating tip-clearance, i.e. distance between rotor-blade tips and stator casing
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F01—MACHINES OR ENGINES IN GENERAL; ENGINE PLANTS IN GENERAL; STEAM ENGINES
- F01D—NON-POSITIVE DISPLACEMENT MACHINES OR ENGINES, e.g. STEAM TURBINES
- F01D5/00—Blades; Blade-carrying members; Heating, heat-insulating, cooling or antivibration means on the blades or the members
- F01D5/12—Blades
- F01D5/22—Blade-to-blade connections, e.g. for damping vibrations
- F01D5/225—Blade-to-blade connections, e.g. for damping vibrations by shrouding
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B7/00—Measuring arrangements characterised by the use of electric or magnetic techniques
- G01B7/14—Measuring arrangements characterised by the use of electric or magnetic techniques for measuring distance or clearance between spaced objects or spaced apertures
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05D—INDEXING SCHEME FOR ASPECTS RELATING TO NON-POSITIVE-DISPLACEMENT MACHINES OR ENGINES, GAS-TURBINES OR JET-PROPULSION PLANTS
- F05D2270/00—Control
- F05D2270/80—Devices generating input signals, e.g. transducers, sensors, cameras or strain gauges
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Turbine Rotor Nozzle Sealing (AREA)
- Structures Of Non-Positive Displacement Pumps (AREA)
Abstract
L'invention concerne le contrôle de jeux, via des capteurs (53) de déplacement capacitifs montés sur une partie fixe de partie de turbomachine à gaz et comportant individuellement des têtes de mesure (55) orientées vers des cibles d'une partie tournante se déplaçant en face d'eux. Sur la partie fixe, on rend mobiles les capteurs par rapport aux cibles, pour caler les têtes de mesure (55) en vis-à-vis des cibles.
Description
Titulaire(s) : SAFRAN AIRCRAFT ENGINES Société par actions simplifiée.
Demande(s) d’extension
Mandataire(s) : ERNEST GUTMANN - YVES PLASSERAUD SAS.
P4/ TURBOMACHINE ET PROCEDE DE CONTROLE D'ETANCHEITE A CAPTEURS CAPACITIFS.
(P// L'invention concerne le contrôle de jeux, via des capteurs (53) de déplacement capacitifs montés sur une partie fixe de partie de turbomachine à gaz et comportant individuellement des têtes de mesure (55) orientées vers des cibles d'une partie tournante se déplaçant en face d'eux. Sur la partie fixe, on rend mobiles les capteurs par rapport aux cibles, pour caler les têtes de mesure (55) en vis-à-vis des cibles.
FR 3 064 738 - A1
440

TURBOMACHINE ET PROCEDE DE CONTROLE D’ETANCHEITE A CAPTEURS CAPACITIFS
Dans une turbomachine à gaz pour aéronef, telle qu'un turbopropulseur ou un turboréacteur d'avion, la présente invention concerne un contrôle de jeu(x) via des capteurs de déplacement capacitifs.
Est en particulier concerné le contrôle de certaines étanchéités aux gaz en circulation.
Dans une telle turbomachine, il est courant que soient prévus un compresseur basse pression et un compresseur haute pression entraînés chacun par un arbre de rotation et reliés par un carter intermédiaire délimitant une veine d'écoulement annulaire d'un flux d'air primaire circulant globalement axialement du compresseur basse pression (BP) vers le compresseur haute pression (HP).
De façon traditionnelle, ces turbomachines comprennent une partie fixe (ou stator) et une partie tournante (ou rotor), la partie considérée tournante étant montée rotative autour d’un axe de rotation, par rapport à la partie considérée fixe, et étant susceptible de subir un mouvement radial et/ou un mouvement axial par rapport à la partie fixe, les parties respectivement fixe et tournante étant localement pourvues de moyens complémentaires d’étanchéité vis-à-vis de fluides gazeux circulant dans la turbomachine.
Tel peut être typiquement le cas dans une turbine ou un compresseur d’aéronef, où une partie de rotor comprend notamment des aubes tournantes, dites aussi rotatives, pourvues en extrémité radialement externes de léchettes. Ces léchettes coopèrent avec des blocs de matière abradable définissant des revêtements radialement internes d’une paroi extérieure fixe de la turbomachine auxquels les blocs sont fixés circonférentiellement, en tant que moyens d'étanchéité complémentaires des léchettes.
Outre en extrémités libres d'aubes rotatives, un contrôle de jeu(x) par capteurs de déplacement capacitifs peut aussi être à réaliser, à l’endroit de viroles radialement internes d’aubes fixes qui peuvent typiquement être pourvues des blocs de matière abradable précités, pour définir alors des moyens d'étanchéité, radialement internes, complémentaires de nouveau de léchettes, typiquement des léchettes de branches d’un anneau intermédiaire d’étanchéité portant des joints interétages.
On retrouve donc dans ces deux exemples une étanchéité assurée entre des pièces respectivement fixe et tournante via des structures à joints labyrinthes comprenant une partie fixe en matière pleine ou en structure nid d’abeille et des léchettes sur la partie tournante. La qualité de l’étanchéité est déterminée par la distance radiale entre la partie fixe et la partie tournante, appelée jeu radial en fonctionnement.
Or, lors du fonctionnement de la turbomachine, les léchettes peuvent être amenées à se déplacer aussi bien radialement qu’axialement, en fonction des conditions thermiques établies entre le rotor et le stator.
En particulier lors des essais moteurs, la connaissance de ces jeux radiaux est primordiale pour pouvoir définir, voire recaler, le modèle thermique et expliquer les performances mesurées de la turbomachine, ou du moins de la partie modulaire considérée, telle que la turbine BP.
Le contrôle des jeux en fonctionnement est ainsi essentiel pour assurer les performances du module considéré
C’est à cette fin que, sur un dispositif de contrôle de jeu(x) entre lesdites parties respectivement fixe et tournante, sont ici prévus des capteurs de déplacement capacitifs comportant individuellement des têtes de mesure montées de façon qu’en face d’elles se déplacent des cibles de la partie tournante, telles les léchettes d’aubes rotatives. Une mesure de jeu par capteur capacitif consiste à mesurer la capacité d’un système, au sens quantité de charge électrique portée par un conducteur pour un potentiel électrique donné. On en déduit la valeur de jeu correspondante, via une courbe d’étalonnage.
Or, la valeur de capacité du système considéré dépend de la distance entre la cible et le capteur, ainsi que de la surface de cible vue par le capteur.
Le signal électrique obtenu dépend donc ici à la fois du jeu radial (via la distance cible/capteur) et du jeu axial (via la surface de cible vue par le capteur), étant précisé que de telles mesures peuvent être utilisées sur l’ensemble des modules d’une turbomachine à gaz pour aéronef, à l’exception de la chambre de combustion (dépourvue de pièce tournante).
Cela étant, de par leur manque de fiabilité (erreur sur la mesure) et de tenue dans la durée (problème de fiabilité), ces mesures ne sont actuellement prévues que sur des moteurs de développement. Un objet de l'invention est ainsi de proposer une solution technique visant à surmonter les problèmes d’erreurs de mesure sur ces capteurs capacitifs. En effet, si une partie de la cible n’est pas en vis-à-vis du capteur concerné alors que la mesure de capacité fournit la même valeur que si elle y était, l’opérateur se trompe sur la valeur de jeu qu’il pense mesurer.
A titre de première solution, il est conseillé que le dispositif de contrôle précité comprenne des moyens de déplacement axial aptes à déplacer au moins un des capteurs de déplacement capacitifs selon ledit axe (X).
On aura compris que :
- axial a pour sens parallèle à l’axe (X) de rotation autour duquel sont montées rotatives les aubes dites tournantes de la turbomachine en cause,
- radial a pour sens perpendiculaire à l’axe X,
- circonférentiel a pour sens s’étendant autour de l’axe X,
- extérieur et intérieur (ou externe et interne) ont respectivement pour sens radialement extérieur et radialement intérieur par rapport à l’axe X ; et
- léchette se traduira souvent en anglais : « rubbing strip (seal) » ou « labyrinth seal lip ».
La solution ci-avant doit permettre :
- de surmonter le doute sur la grandeur mesurée entre jeu radial et jeu axial (via la surface de la cible en vis-à-vis du capteur considéré),
- de sécuriser la mesure du jeu radial,
- voire, par un balayage pendant que la turbomachine fonctionne (les parties tournantes sont en rotation), de réajuster la position des capteurs capacitifs, en vis-à-vis de leurs cibles, afin de s’adapter aux mouvements axiaux de ces cibles.
A ce sujet, un autre aspect de l'invention concerne un procédé de contrôle des jeu(x) visant les mêmes effets que les moyens ci-avant et donc, à cette fin, tel que, sur la partie fixe, on rend mobiles les capteurs par rapport aux cibles, pour caler les têtes de mesure des capteurs en vis-à-vis des cibles.
Par souci de précision et de fiabilité, il est conseillé que, sur la partie fixe, la mobilité des capteurs comprenne des déplacements axiaux des capteurs. Ainsi, on évitera notamment des erreurs de parallaxe.
A ce sujet, pour les mêmes soucis de fiabilité et de facilité de mise en œuvre, il est conseillé que, par capteur, les moyens précités de déplacement comprennent des moyens de translation axiale.
Par ailleurs, afin d’éviter une fréquence de balayage des capteurs extrêmement élevée nécessaire pour pouvoir considérer les mouvements axiaux et radiaux de la partie tournante par rapport à la partie fixe sensiblement nuis sur une période de balayage, il est conseillé que :
- avant de contrôler le jeu entre les parties fixe et tournante, on cale les têtes de mesure des capteurs en vis-à-vis des cibles,
- puis, alors que les cibles de la partie tournante tournent autour dudit axe de rotation à une vitesse constante et que les capteurs occupent une position fixe, on contrôle ledit jeu, en faisant fonctionner les têtes de mesure de ces capteurs.
Lors des mesures par les capteurs concernés, on pourra aussi, en effectuant un balayage latéral (axial) du capteur considéré, s’assurer que la mesure est bien celle d’un jeu radial et non celle d’une surface en vis-à-vis du capteur (jeu axial).
Ainsi pourra-t-on, lors des mesures au cours desquelles on contrôle le(s) jeu(x) en faisant fonctionner les têtes de mesure, déplacer axialement certains au moins des capteurs, relever les mesures résultantes et les comparer entre elles. Si la valeur de capacité relevée ne varie pas, au moins pour un capteur donné, c’est que la mesure est fiable.
De préférence, les moyens précités de translation axiale des capteurs comprendront des moyens d’entrainement motorisés, pas à pas. Ainsi on tendra vers un pilotage des amplitudes de déplacement très précis, gages de sécurité et de qualité.
En pratique, les moyens de translation axiale pourront favorablement comprendre, par capteur :
- un élément support pourvu d’une crémaillère,
- porté par la partie fixe, un pignon engrenant avec la crémaillère,
- une glissière de guidage axial de la tête de mesure, et
- une liaison entre l’élément support et la tête de mesure.
Il s’agit là de solutions fiables, robustes et précises. Ainsi, on pourra réduire de façon fiable la longueur de piste efficace du capteur concerné en pilotant précisément, par ces liaisons à glissière, la position de ce même capteur.
Sur une turbomachine actuelle, il est par ailleurs proposé:
- que les cibles comprennent donc des léchettes dont seront pourvues des aubes tournantes ou des disques de rotor appartenant à ladite partie tournante, et
- que ladite partie fixe comprenne des revêtements abradables comme précités, présentant des logements ouverts en direction des léchettes et dans lesquels seront disposés les capteurs capacitifs.
Pour rendre opérationnelle au mieux la solution précitée, il est par ailleurs proposé que les revêtements abradables soient fixés à des supports de la partie fixe qui seront situés de façon radialement extérieur à eux et que la partie fixe comprenne en outre des boîtiers :
- ouverts vers les cibles quand elles passent radialement face à eux,
- où se déplacent les capteurs et
- disposés dans les logements des revêtements abradables, les boîtiers et les revêtements abradables présentant des fentes où passeront alors les liaisons entre les éléments support et les têtes de mesure.
Ainsi, on dégagera largement les zones où se situent les têtes de mesure et, dans ces montages en face des extrémités libres d’aubes rotatives, on décalera radialement vers l’extérieur les moyens de commande et d’entrainement des têtes de mesure, les rendant moins sensibles à un environnement difficile.
D'autres avantages et caractéristiques de l'invention apparaîtront à la lecture de la description suivante faite à titre d'exemple non limitatif et en référence aux dessins annexés dans lesquels :
- la figure 1 schématise une turbomachine d’aéronef en demi-coupe verticale suivant un plan médian contenant son axe X de rotation horizontal,
- la figure 2 schématise, en même demi-coupe, une partie de turbine basse pression de la turbomachine de la figure 1,
- la figure 3 schématise, en coupe verticale transversale à l’axe X, des aubes mobiles d’un étage de la turbine montée dans un carter extérieur,
- la figure 4 schématise en coupe axiale la coopération entre un revêtement de matière abradable et une extrémité libre d’une aube mobile,
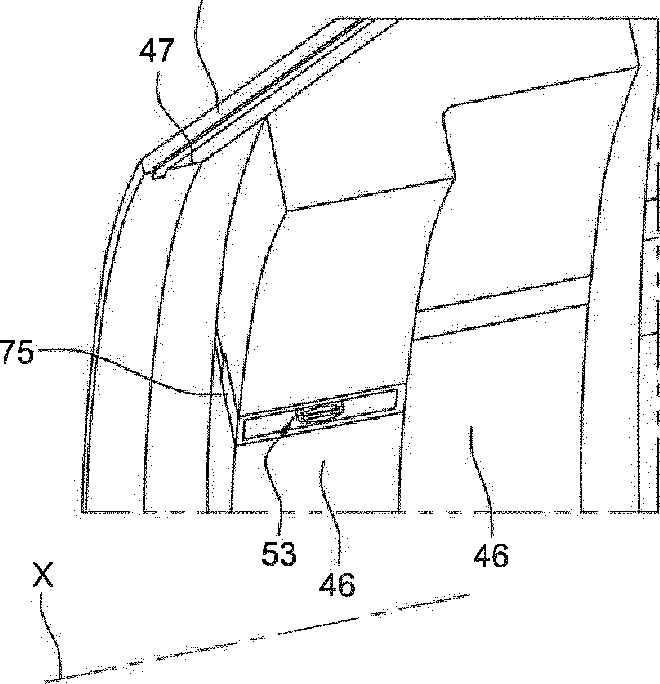
- la figure 5 est une vue générale d’intégration d’un système de pilotage de capteur capacitif,
- les figures 6 et 7 permettre de voir plus précisément le capteur capacitif ainsi que la glissière de guidage, et
- la figure 8 montre une coupe orientée comme la figure 2 qui permet de comprendre un mode possible de fonctionnement du système proposé.
Tel que schématisé sur la figure 1, un réacteur ou turbomachine double flux 1 pour aéronef comporte au moins un carter annulaire, ou enveloppe circulaire, 2 externe de soufflante à l'intérieur de laquelle sont disposés différents composants de la turbomachine.
A l'entrée du carter annulaire 2 externe, en considérant le sens de déplacement de l'air (inverse au sens d'avancement de l'aéronef, c'està-dire de gauche à droite sur la figure ; voir flèches), se trouvent des aubes d’une soufflante 3 couplées à un arbre rotatif 4. Ensuite, reliés à l'arbre 4 qui s’étend autour de l’axe X de rotation de la turbomachine, se trouvent différents étages axiaux de compression, typiquement un compresseur basse pression 5a suivi d’un compresseur haute pression 5b ; puis sont disposés différents autres éléments du moteur dont des étages de turbine(s) axiale(s), typiquement une turbine haute pression 6 suivie d’une turbine basse pression 16.
L'air entre dans le carter annulaire 2 externe de soufflante où il est entraîné par les aubes de la soufflante 3. Pour assurer la propulsion, la majeure partie s'écoule dans la veine secondaire 11 délimitée radialement entre une partie du carter annulaire 2 externe et un carter de moteur 7 plus intérieur. Une autre partie de l'air est aspirée dans une veine primaire 13 par le compresseur basse pression 5a et dirigée vers les étages de turbine par l'intermédiaire d'autres éléments constitutifs du moteur. Des bras raidisseurs 10 relient par ailleurs le carter annulaire 2 externe et le carter de moteur 7.
Chaque compresseur, tel le compresseur basse pression 5a sur la figure 1, comprend une partie tournante, ou rotative, et une partie fixe solidarisée au carter de moteur 7. Plus particulièrement, le compresseur comprend une alternance d’aubes 8 appartenant à des roues de rotor, couplées à l'arbre 4, et donc rotatives, et de redresseurs 9 (ou stators) couplés à la partie fixe du compresseur afin de redresser l'air.
Dans l’exemple, la turbine basse-pression 16 en partie montrée figure 2, comprend trois rangs d'aubes tournantes, ou rotoriques, 18, 20, 22 (aubes 8) et deux rangs d'aubes fixes 24, 26 (redresseurs 9).
Les aubes fixes 24, 26 sont, à leurs extrémités radialement externes, montées par des moyens non représentés sur un carter du turboréacteur et les aubes tournantes 18, 20, 22 sont montées, par exemple par des moyens à queue d'aronde ou analogue, à leurs extrémités radialement internes sur des disques 28, 30, 32 du rotor. Chaque disque comprend une bride annulaire amont 36a et une bride annulaire aval 36b servant à la fixation des disques entre eux et sur un cône d'entraînement 34 relié à l'arbre 4 de la turbomachine, pour tourner avec lui, ainsi qu'à la fixation de flasques annulaires de retenue des pieds d'aubes sur les disques. Les pieds des aubes sont conformés pour coopérer avec des rainures axiales prévues dans les disques du rotor. Chaque aube tournante s'étend le long d'un axe perpendiculaire à l'axe X du rotor sur lequel est montée l’aube.
Deux disques 28,30 axialement successifs de rotor sont solidarisés entre eux, via les brides annulaires amont et aval précitées, par des boulons 33 qui maintiennent également un anneau intermédiaire d’étanchéité 35 portant un joint inter-étage 37 et situé en périphérie extérieure de la bride amont 36a correspondante. Ce joint en soi connu peut comprendre des prolongements annulaires radiaux ou léchettes 41 coopérant avec un revêtement 46 abradable, de façon à définir un joint labyrinthe.
De façon générale, les aubes de rotor sont disposées et peuvent tourner, autour de l’axe X, entre une limite annulaire extérieure 44 et une limite annulaire intérieure 45 qui peut être essentiellement définie par des plateformes intérieures 47 dont sont pourvues les aubes rotatives et les redresseurs fixes. Figure 2, un revêtement 46 est fixé à la virole 43 radialement interne de la plateforme intérieure 47 de l'aube fixe, ou statorique, correspondante. Le revêtement 46 peut être réalisé en secteurs d’anneau et être à structure en nid d'abeilles. Comme également illustré figure 2, la limite annulaire extérieure 44 peut comprendre un carter externe 440 fixe auquel est aussi fixé au moins un revêtement 46.
La figure 3 représente plusieurs aubes 18 rotatives, le sens de rotation autour de l’axe X étant indiqué par la flèche F. Les aubes comportent toutes des léchettes en extrémités extérieures libres. Les léchettes sont disposées afin donc de former un labyrinthe avec un équipement de la paroi interne du carter externe 440 fixe. Plus précisément, et comme illustré notamment figure 4, les léchettes 40 coopèrent par frottement avec les revêtements 46 pour assurer l’étanchéité en sommet des aubes rotatives concernées, c’est-à-dire limiter les circulations d’air parasites entre les sommets des aubes rotatives et le carter externe 440. Les revêtements abradables 46 sont chacun fixés extérieurement sur des secteurs d'anneau 48 accrochés circonférentiellement sur le carter externe 440.
Via un tel dispositif d'étanchéité 50 formé avec les revêtements 46 associés aux léchettes 40, il va donc être possible, au cours du fonctionnement de la turbomachine, de permettre au stator, en s'abrasant, de s'adapter à la forme des léchettes frottant contre lui par leurs sommets.
Or, comme expliqué ci-avant, la qualité de l’étanchéité est déterminée par la distance radiale L (figures 2,4), entre la partie fixe, ici les revêtements 46, et la partie tournante, ici les léchettes 40.
C’est pour prendre en compte cette distance radiale qu’est prévu et schématisé figures 5-8 un dispositif 51 de contrôle de jeu(x), comprenant des capteurs de déplacement capacitifs ; voir celui 53 montré sur les figures.
Chaque capteur de déplacement capacitif (ci-après appelé capteur) 53 comporte une tête de mesure 55 à visée (sensiblement) radiale. En face de chaque tête de mesure 55 se déplacent des cibles de la partie tournante : les léchettes 40 dans l’exemple.
Pour notamment pallier un manque de fiabilité (erreur de mesures) et des problèmes de tenue dans la durée, le dispositif 51 de contrôle comprend en outre des moyens 57 de déplacement liés aux capteurs 53, afin de permettre des mouvements axiaux de ces capteurs.
Par souci de précision et de fiabilité dans l’environnement assez sévère rencontré, il est conseillé que, comme illustré, les moyens 57 de déplacement comprennent des moyens 59 de translation axiale assurant donc un déplacement individuel des capteurs 53 parallèlement à l’axe de rotation X.
Dans le même but, il est proposé que, là encore comme illustré, ces moyens 59 de translation axiale comprennent des moyens 61 d’entrainement motorisés, pas à pas.
Comme plus particulièrement montré figure 8, la précision et la simplicité de fonctionnement recherchées pourront amener à ce que les moyens 59 de translation axiale comprennent, par capteur :
- un élément support 63 pourvu d’une crémaillère 65,
- porté par la partie fixe, telle que les secteurs d'anneau 48, un pignon 67 engrenant avec la crémaillère 65 et mû par un moteur 68 fixé au support 48,
- une glissière 69 de guidage axial de la tête 55 de mesure considérée, et
- une liaison 71 entre l’élément support 63 et la tête 55 de mesure.
Pour une intégration pertinente, assez aisée à réaliser et protégée mécaniquement, des têtes de mesure 55 en particulier, il est proposé que les revêtements abradables 46 présentent des logements 73 ouverts chacun en direction des léchettes 40 et dans lesquels sont disposés les capteurs 53 (au moins leurs têtes 55 de mesure).
Et, à l’opposé radial, dans l’exemple, des fixations extérieures à la partie fixe 48 des revêtements abradables 46 (voir figure 4, repères 49a49b), la partie fixe considérée comprend en outre des boîtiers 75 disposés dans les logements 73.
Les boîtiers 75 sont ouverts vers les cibles (léchettes 40) quand elles passent radialement face à eux.
Dans ces boîtiers 75 sont montés et se déplacent les capteurs 53.
En outre, les revêtements abradables 46 et les boîtiers 75, voire les plateformes intérieures 47, présentent des fentes, respectivement référencées 79, 81 et 83 figure 8 pour le capteur considéré, où passent les liaisons 71 entre les éléments support 63 et les têtes 55 de mesure.
Dans l’exemple de cette figure 8, on se trouve sur une partie de turbine BP, avec un carter externe incliné vers l’aval (AV) par rapport à l’axe X et appartenant donc au support externe des revêtements abradables 46 réparties bout à bout à sa circonférence interne. A son extrémité interne libre, le revêtement abradable 46 schématisé est par contre orienté axialement. Ainsi, l’élément support 63 et sa crémaillère 65 sont orientés de biais par rapport à l’axe X. La liaison 71 est, elle, de biais par rapport à la radiale Z à l’axe X et traverse radialement un orifice ou fente 85 de l’élément support 63.
Quelle que soit sa réalisation précise, le dispositif 51 de contrôle ciavant présenté va donc permettre, en rendant mobiles, sur la partie fixe, les capteurs 53 par rapport aux cibles (ici 40), de caler les têtes 55 de mesure des capteurs en vis-à-vis de ces cibles.
Et en prévoyant que, sur ladite partie fixe, la mobilité des capteurs 53 comprenne des déplacements axiaux de ces capteurs, via un système de pilotage de la position des capteurs, ou de chaque capteur, défini par les moyens de déplacement 57, on peut espérer limiter au mieux la longueur de piste efficace du capteur concerné.
On pourra par ailleurs juger utile, lors des mesures au cours desquelles on contrôle ledit jeu radial L en faisant donc fonctionner les têtes de mesure 55, de déplacer axialement certains au moins des capteurs 53, de relever alors les mesures résultantes et de les comparer entre elles.
En effet, si l’on obtient un signal non constant lors d’un tel balayage axial, on pourra notamment programmer le système pour alors ne pas exploiter les données acquises en vue d’un recalage long et coûteux qui ne serait pas représentatif de la réalité. Une nouvelle étape de recalage, en vis-à-vis des cibles, de la/des tête(s) 55 de mesure concernée(s) sera toutefois alors engagée.
Si par contre un balayage axial du capteur 53 considéré a permis de récupérer une valeur de capacité qui n’a (sensiblement) pas variée, alors on pourra considérer avec une bonne certitude que la mesure relevée par le capteur est bien celle d’un jeu radial L, et non une mesure par rapport à une autre surface en vis-à-vis du capteur et correspondant à un jeu axial.
En résumé, la mise en place d’au moins un capteur 53 capacitif mobile à visée (sensiblement) radiale permettra de dissocier la part du jeu radial de celle du jeu axial dans le signal d’acquisition. Cette solution facilite grandement le recalage des modèles aérothermiques et du rendement modulaire de la turbine BP, la principale donnée d’entrée (celle du jeu radial) permettant de disposer d’une valeur très fiable.
On notera qu’a priori, pour les points de mesure en régime stabilisé, peu importe la fréquence de balayage, puisque la partie rotor sera alors immobile axialement et radialement, par rapport à la partie stator.
Par contre, il est a priori conseillé, après avoir calé les têtes 55 de mesure des capteurs en vis-à-vis des cibles 40, de s’assurer que ces cibles tournent autour de l’axe X à une vitesse constante et que les capteurs 53 occupent une position fixe, et seulement alors de contrôler dans ces conditions le(s) jeu(x) précité(s), en faisant donc fonctionner les têtes de mesure 55. Sinon, les mesures pourraient être imparfaites.
Claims (10)
- REVENDICATIONS1. Turbomachine à gaz comprenant :- une partie fixe (24,26 ;46 ;48 ;440) et une partie tournante (6 ;8 ; 18,20,22 ;41) montée en rotation autour d’un axe (X), lesdites parties comprenant des moyens complémentaires d’étanchéité (41,46;50) vis-àvis de la circulation d’un fluide gazeux, la partie tournante étant susceptible de subir un mouvement radial et/ou un mouvement axial par rapport à la partie fixe, et- un dispositif de contrôle (51) de jeu(x) entre la partie fixe et la partie tournante, le dispositif de contrôle comprenant des capteurs (53) de déplacement capacitifs comportant des têtes de mesure (55) orientées radialement et en face desquelles sont aptes à se déplacer des cibles (40) de la partie tournante, caractérisée en ce que le dispositif de contrôle (51) comprend en outre des moyens de déplacement axial (57) aptes à déplacer au moins un des capteurs (53) selon ledit axe (X).
- 2. Turbomachine à gaz selon la revendication 1, dans laquelle les moyens (57) de déplacement axial comprennent des moyens (59) de translation axiale.
- 3. Turbomachine à gaz selon la revendication 2, dans laquelle les moyens (59) de translation axiale comprennent des moyens d’entrainement motorisés (61), pas à pas.
- 4. Turbomachine à gaz selon la revendication 2 ou 3, où les moyens (59) de translation axiale comprennent, par capteur :- un élément support (63) pourvu d’une crémaillère (65),- porté par la partie fixe (48), un pignon (67) engrenant avec la crémaillère,- une glissière (69) de guidage axial de la tête de mesure, et- une liaison (71) entre l’élément support et la tête de mesure.
- 5. Turbomachine à gaz selon l’une quelconque des revendications précédentes, dans laquelle:- les cibles (40) comprennent des léchettes dont sont pourvues des aubes tournantes ou des disques de rotor appartenant à la partie tournante,- et la partie fixe comprend des revêtements abradables (46) présentant des logements ouverts en direction des léchettes et dans lesquels sont disposés les capteurs (53).
- 6. Turbomachine à gaz selon la revendication 5, dans laquelle les revêtements abradables sont fixés à des supports (49a,49b) de la partie fixe qui sont situés de façon radialement extérieure à eux et la partie fixe (24,26 ;46 ;48 ;440) comprend en outre des boîtiers (75) :- ouverts vers les cibles (40) quand elles passent radialement face à eux,- où se déplacent les capteurs et- disposés dans les logements (73) des revêtements abradables (46), les boîtiers et les revêtements abradables présentant des fentes (85) où passent les liaisons (71) entre les éléments support (63) et les têtes de mesure (55).
- 7. Procédé de contrôle de jeu(x) entre une partie fixe (24,26 ;46 ;48 ;440) et une partie tournante (6 ;8 ; 18,20,22 ;41) montée autour d’un axe de rotation, lesdites parties comprenant des moyens (41,46;50) complémentaires d’étanchéité vis-à-vis de la circulation d’un fluide gazeux dans une turbomachine à gaz dans laquelle la partie tournante est susceptible de subir un mouvement radial et/ou un mouvement axial par rapport à la partie fixe, le dispositif de contrôle comprenant des capteurs (53) de déplacement capacitifs montés sur la partie fixe et comportant individuellement des têtes de mesure (55) orientées vers des cibles de la partie tournante qui se déplacent en face d’eux, caractérisé en ce que, sur la partie fixe, on rend mobiles les capteurs (53) par rapport aux cibles (40), pour caler les têtes de mesure (55) des capteurs en vis-à-vis des cibles.
- 8. Procédé selon la revendication 7 dans lequel, sur la partie fixe (24,26 ;46 ;48 ;440), la mobilité des capteurs (53) comprend des déplacements axiaux des capteurs.
- 9. Procédé selon la revendication 7 ou 8 dans lequel:- avant de contrôler le jeu (L) entre les parties fixe et tournante, on cale les têtes de mesure (55) des capteurs en vis-à-vis des cibles (40),- puis, alors que les cibles de la partie tournante (6 ;8 ; 18,20,22 ;41)5 tournent autour dudit axe de rotation (X) à une vitesse constante et que les capteurs (53) occupent une position fixe, on contrôle ledit jeu, en faisant fonctionner les têtes (55) de mesure de ces capteurs.
- 10. Procédé selon l’une quelconque des revendications 7 à 9 dans lequel, lors des mesures au cours desquelles on contrôle ledit jeu (L)10 en faisant fonctionner les têtes de mesure (55), on déplace axialement certains au moins des capteurs (53), on relève les mesures résultantes et on les compare entre elles.1/4
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR1752655A FR3064738B1 (fr) | 2017-03-29 | 2017-03-29 | Turbomachine et procede de controle d'etancheite a capteurs capacitifs |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR1752655A FR3064738B1 (fr) | 2017-03-29 | 2017-03-29 | Turbomachine et procede de controle d'etancheite a capteurs capacitifs |
| FR1752655 | 2017-03-29 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| FR3064738A1 true FR3064738A1 (fr) | 2018-10-05 |
| FR3064738B1 FR3064738B1 (fr) | 2019-04-05 |
Family
ID=59153059
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| FR1752655A Active FR3064738B1 (fr) | 2017-03-29 | 2017-03-29 | Turbomachine et procede de controle d'etancheite a capteurs capacitifs |
Country Status (1)
| Country | Link |
|---|---|
| FR (1) | FR3064738B1 (fr) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114486103A (zh) * | 2022-01-13 | 2022-05-13 | 华能国际电力股份有限公司德州电厂 | 一种凝汽器检漏装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0246576A1 (fr) * | 1986-05-23 | 1987-11-25 | Mtu Motoren- Und Turbinen-Union MàNchen Gmbh | Système de mesure capacitif |
| FR2971020A1 (fr) * | 2011-01-28 | 2012-08-03 | Snecma | Soufflante ou compresseur de turbomachine |
| US20130173213A1 (en) * | 2012-01-03 | 2013-07-04 | General Electric Company | Method and apparatus for obtaining discrete axial clearance data using radial clearance sensors |
| EP2669621A2 (fr) * | 2012-05-31 | 2013-12-04 | General Electric Company | Système de mesure de jeu rotatif et son procédé de fonctionnement |
-
2017
- 2017-03-29 FR FR1752655A patent/FR3064738B1/fr active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0246576A1 (fr) * | 1986-05-23 | 1987-11-25 | Mtu Motoren- Und Turbinen-Union MàNchen Gmbh | Système de mesure capacitif |
| FR2971020A1 (fr) * | 2011-01-28 | 2012-08-03 | Snecma | Soufflante ou compresseur de turbomachine |
| US20130173213A1 (en) * | 2012-01-03 | 2013-07-04 | General Electric Company | Method and apparatus for obtaining discrete axial clearance data using radial clearance sensors |
| EP2669621A2 (fr) * | 2012-05-31 | 2013-12-04 | General Electric Company | Système de mesure de jeu rotatif et son procédé de fonctionnement |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114486103A (zh) * | 2022-01-13 | 2022-05-13 | 华能国际电力股份有限公司德州电厂 | 一种凝汽器检漏装置 |
| CN114486103B (zh) * | 2022-01-13 | 2024-03-12 | 华能国际电力股份有限公司德州电厂 | 一种凝汽器检漏装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| FR3064738B1 (fr) | 2019-04-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| FR3072414B1 (fr) | Dispositif et procede de refroidissement d'une turbine basse pression dans une turbomachine | |
| EP2536921B1 (fr) | Procédé et dispositif de correction d'une mesure de pression d'un flux gazeux circulant dans un moteur d'aéronef. | |
| FR3014152A1 (fr) | Dispositif de guidage d'aubes de redresseur a angle de calage variable de turbomachine et procede d'assemblage d'un tel dispositif | |
| FR3066559A1 (fr) | Module de soufflante a pales a calage variable | |
| FR2972759A1 (fr) | Systeme d'etancheite et de retenue axiale des aubes pour une roue de turbine de turbomachine | |
| EP3421730B1 (fr) | Turbine pour turbomachine avec anneau d'étanchéité comportant deux parties | |
| FR3087888A1 (fr) | Dispositif et procede de surveillance de duree de vie d'un equipement hydraulique d'un aeronef | |
| FR3064738A1 (fr) | Turbomachine et procede de controle d'etancheite a capteurs capacitifs | |
| US10907477B2 (en) | Clip and pin balance for rotor | |
| FR3058755A1 (fr) | Turbine pour turbomachine | |
| FR2981398A1 (fr) | Mesure de dilatation differentielle entre l'enveloppe interieure et l'enveloppe exterieure | |
| FR2983236A1 (fr) | Procede de surveillance du jeu d'une cinematique de liaison entre un organe de commande et un organe recepteur. | |
| US11434827B2 (en) | Hydrostatic seal with secondary seal structural protection | |
| EP4202191A1 (fr) | Bouchon de retenue | |
| FR3067405A1 (fr) | Turbomachine et procede d'etancheite par soufflage d'air | |
| US20210062862A1 (en) | Hydrostatic seal aligned with rotor rotation | |
| EP3615774B1 (fr) | Dispositif d'étanchéité entre rotor et stator de turbomachine | |
| FR3027635A1 (fr) | Systeme de commande d'aubes a calage variable pour une turbomachine | |
| FR3043650A1 (fr) | Aube de stator de turbomachine, carter de soufflante comprenant une telle aube, systeme d'inversion de poussee d'une turbomachine equipee d'une telle aube et turbomachine equipee de ladite aube, dudit carter ou dudit systeme | |
| FR3024996A1 (fr) | Anneau de commande d'un etage d'aubes a calage variable pour une turbomachine | |
| EP3969737B1 (fr) | Procédé et dispositif d'estimation et d'utilisation d'une zone morte d'une vanne de turbomachine | |
| EP4041628B1 (fr) | Système de commande de calage cyclique de pales | |
| FR3070202A1 (fr) | Arbre de transmission pour entrainer un arbre de soufflante d'un prototype de turbomachine dans un banc d'essais d'ingestion et de retention | |
| FR2997128A1 (fr) | Aubage redresseur de turbomachine | |
| FR3055354B1 (fr) | Turbomachine comprenant des moyens d'etancheite et procede de montage de la turbomachine correspondant |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PLFP | Fee payment |
Year of fee payment: 2 |
|
| PLSC | Publication of the preliminary search report |
Effective date: 20181005 |
|
| PLFP | Fee payment |
Year of fee payment: 3 |
|
| PLFP | Fee payment |
Year of fee payment: 4 |
|
| PLFP | Fee payment |
Year of fee payment: 5 |
|
| PLFP | Fee payment |
Year of fee payment: 6 |
|
| PLFP | Fee payment |
Year of fee payment: 7 |
|
| PLFP | Fee payment |
Year of fee payment: 8 |