EP4331969A1 - Brise-lames flottant - Google Patents
Brise-lames flottant Download PDFInfo
- Publication number
- EP4331969A1 EP4331969A1 EP22192966.4A EP22192966A EP4331969A1 EP 4331969 A1 EP4331969 A1 EP 4331969A1 EP 22192966 A EP22192966 A EP 22192966A EP 4331969 A1 EP4331969 A1 EP 4331969A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- wave
- diffractor
- floating
- asset
- floating wave
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000007667 floating Methods 0.000 title claims abstract description 395
- 238000000034 method Methods 0.000 claims abstract description 17
- 238000010276 construction Methods 0.000 claims description 35
- 238000009434 installation Methods 0.000 claims description 20
- 238000012423 maintenance Methods 0.000 claims description 20
- 230000008439 repair process Effects 0.000 claims description 18
- 230000033001 locomotion Effects 0.000 description 116
- 230000005284 excitation Effects 0.000 description 36
- 230000004044 response Effects 0.000 description 33
- 238000004088 simulation Methods 0.000 description 22
- 230000007423 decrease Effects 0.000 description 19
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 19
- 238000013016 damping Methods 0.000 description 10
- 230000003247 decreasing effect Effects 0.000 description 9
- 238000010009 beating Methods 0.000 description 7
- 230000009471 action Effects 0.000 description 6
- 230000005484 gravity Effects 0.000 description 6
- 239000011159 matrix material Substances 0.000 description 6
- 230000009467 reduction Effects 0.000 description 6
- 238000001228 spectrum Methods 0.000 description 6
- 230000000694 effects Effects 0.000 description 5
- 239000003381 stabilizer Substances 0.000 description 5
- 230000008878 coupling Effects 0.000 description 4
- 238000010168 coupling process Methods 0.000 description 4
- 238000005859 coupling reaction Methods 0.000 description 4
- 239000007788 liquid Substances 0.000 description 4
- 230000001133 acceleration Effects 0.000 description 3
- 238000013461 design Methods 0.000 description 3
- 230000002706 hydrostatic effect Effects 0.000 description 3
- 239000013535 sea water Substances 0.000 description 3
- 238000012546 transfer Methods 0.000 description 3
- 230000008901 benefit Effects 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 230000005279 excitation period Effects 0.000 description 2
- 239000012530 fluid Substances 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 238000005096 rolling process Methods 0.000 description 2
- 230000003595 spectral effect Effects 0.000 description 2
- 238000013459 approach Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 238000005260 corrosion Methods 0.000 description 1
- 230000007797 corrosion Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 230000009189 diving Effects 0.000 description 1
- 238000005553 drilling Methods 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 238000005188 flotation Methods 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 230000005855 radiation Effects 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 230000000087 stabilizing effect Effects 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images











Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B35/00—Vessels or similar floating structures specially adapted for specific purposes and not otherwise provided for
- B63B35/34—Pontoons
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B35/00—Vessels or similar floating structures specially adapted for specific purposes and not otherwise provided for
- B63B35/44—Floating buildings, stores, drilling platforms, or workshops, e.g. carrying water-oil separating devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B39/00—Equipment to decrease pitch, roll, or like unwanted vessel movements; Apparatus for indicating vessel attitude
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B43/00—Improving safety of vessels, e.g. damage control, not otherwise provided for
- B63B43/02—Improving safety of vessels, e.g. damage control, not otherwise provided for reducing risk of capsizing or sinking
- B63B43/04—Improving safety of vessels, e.g. damage control, not otherwise provided for reducing risk of capsizing or sinking by improving stability
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B27/00—Arrangement of ship-based loading or unloading equipment for cargo or passengers
Definitions
- the invention relates to a novel approach to limit motions of floating or fixed assets, e.g. floating wind turbines, during marine operations, e.g. maintenance, installation or repair works, including, but not limited to, major component replacement (MCR).
- MCR major component replacement
- WO 2015/104026 relates to a method for accessing an offshore construction under difficult weather conditions.
- the method relates to a service vessel bringing crew to an offshore construction.
- bringing crew to an offshore construction is limited by the wave size. Therefore, a weather window exists in which crew can be transported onto offshore constructions.
- the method relates to increasing the weather window. Therefore, the vessel transporting the crew is protected by another vessel positioned at a distance from the offshore construction and to the side of the offshore construction from where the waves are beating, whereas the service vessel is positioned in the immediate vicinity or in direct contact with the offshore construction. This allows the first vessel to subdue the waves in the area in which the service vessel is to access construction with crew or equipment.
- the protecting vessel can be equipped with additional lee providers such as breakwaters on the sides of the vessel.
- the lee providers can be pivoted about and point/axis along the sides of the vessel.
- the draught of the lee providers can be adjusted to subdue the waves that go under the first vessel.
- the first vessel is positioned along the wave crest and has a width of between 5 m and 30 m, preferable the width is between 10 m and 25 m and even more preferable between 15 m and 20 m. These widths enable the first vessel to subdue the waves having a wavelength relevant for transporting crew.
- the waves relevant for transporting crew are shorter wavelength waves leading to fast motion of the service vessel making it impossible to transport crew onto an offshore construction.
- the first vessel since the protecting vessel, which is positioned along the wave crests, is much longer than wide, the first vessel rolls longitudinally of the wave crests, thereby creating smooth water for the service vessel.
- the first vessel subdues shorter waves, but longer waves go under the first vessel and lead to a rolling action of the first vessel.
- the shorter waves are subdued, which enables the crew to board an offshore construction. Long wavelength waves may have a large amplitude, but their long period may still enable personnel to transit from one vessel to another.
- the prior teaches that the subduing action can be improved by increasing the draught of the vessel.
- the prior art teaches to use a vessel to subdue waves by positioning the vessel along the wave crests, however, waves of longer periods go under the vessel and lead to a rolling action of the vessel.
- the optimal width of the vessel is between 5 m and 30 m and that larger or smaller vessels would be less successful for subduing the waves relevant for transporting crew.
- the prior art teaches that waves can be subdued by increasing the draught of an object.
- the width of the first vessel should be limited to 5 m to 30 m, as the effectiveness otherwise would decrease.
- the vessel is longer than wide and that therefore the vessel should be positioned along the wave crests, since in case the vessel is positioned transverse to the wave crests, i.e. the long axis in the direction of the waves, the subduing is less until additional lee providers are pivoted from the side of the vessel to increase the width of the vessel.
- the length in direction perpendicular to the direction of the waves is important.
- the present invention relates to servicing offshore or inshore constructions.
- One limiting factor when servicing an offshore or inshore construction, e.g. maintenance, installation or repair work, or major component replacement is the significant wave height.
- the period of the waves dominating the relevant motions is typically between 4 s and up to 10 s.
- servicing vessels to perform operations on an offshore construction are typically larger and heavier than vessels bringing crew to an offshore construction, the response of the vessel to shorter period waves is negligible so that the relative motion introduced by these shorter waves does not affect the operation of the vessel.
- the relevant wavelengths therefore differ, since the wavelength relevant for transporting crew does not affect the servicing vessel of the present invention in a relevant manner.
- safe conditions for marine operations, i.e. conditions under which the relative motion between an offshore construction and a construction, maintenance or repair asset was simulated and evaluated as safe.
- safe conditions correspond to conditions under which repair or maintenance work can be carried out, because the relative motion between the offshore construction and the servicing vessel is small enough so that operations on the offshore construction can be carried out.
- significant wave heights are considered safe, for example, significant wave heights up to 0.5 m, 1 m, 1.5 m, 2 m, 2.5 m, or 3 m.
- wave periods up to 10 s, 12 s, or 14 s may be relevant.
- vessels having a width smaller than 30 m are ineffective for the relevant wave periods between 4 s and 10 s, since the waves pass under these vessels.
- waves can be diffracted by a floating object to decrease the wave height after the wave has passed the object, a so-called wave diffractor.
- the diffraction of waves is governed by different principles and leads to a different geometry.
- the inventors found that the efficiency of diffracting waves with a floating object depends on the motion response of the floating object with respect to the sway, roll, and heave motion.
- a floating object acting as wave diffractor having a width of more than 30 m can reduce a seastate of wave height 2.5 m down to 1.5 m and less for wave periods between 4 s and 10 s in an effective manner.
- a wave diffractor allows to reduce the motion amplitude of a floating wind energy plant or floating wind turbine by up to a factor of two.
- the weather window for repair or maintenance work can be increased by 67% or by 20% points with respect to the overall time window, since otherwise safe conditions of about 1.5 m with periods up to 8 s for the relevant waves would only be present in about 30% of the time.
- the present invention recognizes wave diffraction and/or reflection is optimal when the motion of the wave diffractor with respect to sway, roll, and heave is minimal.
- the present invention aims at limiting the motion of the wave diffractor itself to achieve optimized diffraction.
- the present invention recognizes that there are five ways to achieve reduced motions and accelerations or to shift the natural periods outside the envisaged operational range:
- the invention recognizes that the sway motion can be reduced by increasing the beam of a wave diffractor, because increasing the beam width keeps the attack surface of the incoming waves constant, when the wave diffractor is positioned along the wave crest, i.e. the longitudinal axis of the wave diffractor is aligned with the wave crests or substantially perpendicular to the direction of the waves.
- the inventors found that increasing the beam of the wave diffractor leads to a decreased response of the wave diffractor to incoming waves with respect to the sway motion, leading to a more effective wave diffraction and, thus, a decreased wave height in the wave shadow of the wave diffractor.
- This understanding is exactly opposite to the teaching of the prior art which teaches that larger or smaller vessel would be less effective.
- the roll about the longitudinal axis is also decreased by increasing the beam width, since the mass moment of inertia about the longitudinal axis is increased.
- the invention recognizes that increasing the beam increases the mass moment of inertia and, in particular, the mass moment of inertia about the longitudinal axis, but also increases the stiffness, however, the increased stiffness can be compensated by providing free liquid surfaces in ballast tanks.
- the invention relates to increasing the mass moment of inertia by using a wide wave diffractor, wherein only external ballast tanks are filled.
- the invention relates to increasing the mass moment of inertia by using a wide wave diffractor, wherein the most outward ballast tanks or the outer ballast tanks are filled.
- the floating wave diffractor may comprise fixed ballast.
- the mass moment of inertia may be increased by adding structural weight.
- the invention recognizes that the heave motion is reduced by increasing the beam, since a wide wave diffractor has a positive influence on the system response.
- the invention also proposes a semi-submersible, which would have a reduced waterplane area and therefore reduces the heave motion.
- the semi-submersible may have at least one side being closed.
- the inventors found that increasing the beam of the wave diffractor leads to a more efficient diffraction of waves, since the sway, roll, and heave motion of the wave diffractor is reduced.
- the reduced motion of the wave diffractor accordingly leads to an increased reduction of wave height for the relevant waves.
- the invention therefore relates to providing a more efficient wave diffractor by decreasing the motion of the wave diffractor.
- the present invention aims at providing an optimized and efficient wave diffractor to decrease the wave height on the lee side with respect to the direction of the waves to allow for installation, maintenance or repair work.
- the inventors recognized that for wave periods between 4 s and 10 s.
- a beam of the wave diffractor of 30 m or more is necessary to reduce the significant wave heights of about 2.5 m down to 1.5 m or less.
- the present invention achieves the aforementioned object by a method to facilitate operations in connection with fixed or floating offshore assets including: determining a main wave direction, providing a floating wave diffractor having a length and a beam, wherein the length of the floating wave diffractor is greater than the beam of the floating wave diffractor, positioning of the floating wave diffractor against the main wave direction in front of at least one fixed or floating asset, wherein the positioning includes moving the wave diffractor in the longitudinal and transverse direction of the floating wave diffractor with respect to the waterplane and rotating, i.e.
- the floating wave diffractor about an axis through the center of the floating wave diffractor and perpendicular to the waterplane, wherein the wave diffractor is positioned substantially transverse to the main wave direction, wherein the floating wave diffractor has a beam width of 30 m or more, in particular, such that at least the height of waves with periods between 4 s and up to 10 s are is reduced by the floating wave diffractor.
- the positioning may further include positioning the floating wave diffractor against the main wave direction in front of a first fixed or floating asset and a second fixed or floating asset.
- the floating wave diffractor has a beam of 30 m or more, 35 m or more, 40 m or more, 45 m or more, 50 m or more, 55 m or more, 60 m or more, 65 m or more, 70 m or more, 75 m or more, 80 m or more, 85 m or more, 90 m or more, 95 m or more, 100 m, or more.
- the beam of a barge or pontoon may be 100 feet.
- the floating wave diffractor has a beam of 100 ft or more, 110 ft or more, 115 ft or more, 120 ft or more, 130 ft or more, 140 ft or more, 160 ft or more, 170 ft or more, 180 ft or more, 190 ft or more, 200 ft or more, 210 ft or more, 220 ft or more, 230 ft, or more, 240 ft or more, 250 ft or more, 260 ft or more, 270 ft, or more, 280 ft or more, 290 ft or more, 300 ft or more, 310 ft or more, 320 ft or more, or 330 ft or more.
- the floating wave diffractor has a length between 35 m and 200 m.
- the floating wave diffractor may have a length of 40 m, 50 m, 60 m, 70 m, 80 m, 90 m, 100 m, 110 m, 120 m, 130 m, 140 m, 150 m, 160 m, 180 , 190 m or 200 m.
- the floating wave diffractor has a length of 120 ft, 130 ft, 150 ft, 170 ft, 190 ft, 210ft, 230 ft, 250 ft, 270 ft, 290 ft, 310 ft, 330 ft, 350 ft, 370 ft, 390 ft, 410 ft, 430 ft, 450 ft, 470 ft, 490ft, 510 ft, 530 ft, 550 ft, 570 ft, 590 ft, 610 ft, 630 ft, 650 ft, or 670 ft.
- the length may be varied in one meter or one foot steps.
- the floating wave diffractor has a draught between 5 m and 20 m.
- the floating wave diffractor may have a draught of 5 m, 6 m, 7 m, 8 m, 9 m, 10 m, 11 m, 12 m, 13 m, 14 m, 15 m, 16 m, 18 m, 19 m or 20 m.
- the draught may be 16 ft, 17 ft, 18ft, 19 ft, 20 ft, 21 ft, 22 ft, 23 ft, 24 ft, 25 ft, 26 ft, 27 ft, 28 ft, 29 ft, 30 ft, 31 ft, 32 ft, 33 ft, 34 ft, 35 ft, 36 ft, 37 ft, 38 ft, 39 ft, 40 ft, 41 ft, 42 ft, 43 ft, 44 ft, 45 ft, 46 ft, 47 ft, 48 ft, 49 ft, 50 ft, 51 ft, 52 ft, 53 ft, 54 ft, 55 ft, 56 ft, 57 ft, 58 ft, 59 ft, 60 ft, 61 ft, 62 ft, 65 ft.
- the method to facilitate operations in connection with fixed or floating offshore assets includes: determining a main wave direction, providing a floating wave diffractor having a length and a beam, wherein the length of the floating wave diffractor is greater than the beam of the floating wave diffractor, positioning of the floating wave diffractor against the main wave direction in front a first and a second fixed or floating asset, wherein the positioning includes moving the wave diffractor in the longitudinal and transverse direction of the floating wave diffractor with respect to the waterplane and rotating the floating wave diffractor , i.e.
- the wave diffractor is positioned substantially transverse to the main wave direction, wherein the floating wave diffractor has a beam of 30 m or more, in particular, such that at least the height of waves with periods between 4 s and up to 10 s are is reduced by the floating wave diffractor.
- the main wave direction refers to the waves associated with the seastate.
- the main wave direction refers to the direction of the waves having a period between 4 s and 10 s.
- the waves having a period between 4s and 10s may not exactly have the same direction.
- the main wave direction is the average direction of the directions of the waves with a period between 4 s and 10 s.
- the waves with a period between 4 s and 10 s have a direction substantially in the main wave direction.
- the floating wave diffractor is positioned substantially transverse to the main wave direction, e.g. the floating wave diffractor is positioned transverse to the average direction of the directions of waves having a period between 4 s and 10 s, i.e. transverse to the main wave direction.
- the floating wave diffractor has a length in the longitudinal direction and a beam in a direction perpendicular to the length or longitudinal direction.
- the longitudinal direction and the axis along the beam may be parallel to the waterplane.
- the transverse direction may be parallel to the beam.
- the first asset to be leeward of the wave diffractor may be a floating offshore installation.
- the first asset may be one of a wind turbine, floating wind turbine, wave power station, floating wave power station, wave power plants/wave power machines, tidal power stations/tidal power, bridges/bridge piers, an installation for constructing and repairing harbors, jetties and quay constructions machines.
- a crane that can pull itself and the load up along the first asset using the first asset for support may be present.
- the first asset may a jacket foundation, a gravity-based foundation, or a monopile foundation for offshore wind or oil- and gas platforms.
- the operations may relate to the installation, construction, maintenance, inspection, repair or decommissioning of the above and salvage / wreck removal.
- a second asset may be a maintenance asset or a repair asset, wherein the second asset may be configured to perform or to allow the performance of maintenance and/or repair work.
- the floating wave diffractor is also positioned against the main wave direction in front of the second asset. Positioning the floating wave diffractor against the main wave direction in front of the first and second asset reduces the motion of the first and second asset. The reduction of motion of the first and second asset leads to a reduced relative motion between the first and second asset. Therefore, operations performed by the second asset on the first asset may be performed more easily and more safe. In particular, the operations may be performed within a wider weather window.
- the second asset may be a maintenance vessel, a floating crane or a vessel to install major components of offshore wind turbines.
- the second asset may be a crane that can pull itself and the load up along the offshore construction using the offshore construction for support.
- the second asset may be positioned such that operations on the offshore construction may be performed.
- the floating wave diffractor is positioned against the main wave direction in front a first and a second fixed or floating asset, the positioning includes moving the wave diffractor in the longitudinal and transverse direction of the floating wave diffractor with respect to the waterplane and rotating the floating wave diffractor about an axis through the center of the floating wave diffractor and perpendicular to the waterplane.
- the rotation through an axis about an axis through the center of the floating wave diffractor and perpendicular to the waterplane the floating wave diffractor is also called yawing.
- substantially transverse means that the longitudinal axis of the wave diffractor is perpendicular or at an angle about and/or between 45° to 135° with respect to the main direction of the waves.
- the main direction of the waves refers to the direction of waves with a period between 4 s and 10 s.
- the angle between the longitudinal axis of the floating wave diffractor and the main direction of the waves is at an angle and/or between 45° and 135°. More preferably, the angle between the longitudinal axis of the floating wave diffractor and the main direction of the waves is at an angle and/or between 55° and 125°.
- the angle between the longitudinal axis of the floating wave diffractor and the main direction of the waves is at an angle and/or between 65° and 115°. More preferably, the angle between the longitudinal axis of the floating wave diffractor and the main direction of the waves is at an angle and/or between 75° and 105°. More preferably, the angle between the longitudinal axis of the floating wave diffractor and the main direction of the waves is at an angle and/or between 85° and 95°.
- the positioning may include that the first asset and the second asset are positioned such that the first asset and the second asset are in an area defined by an axis thought the center of the floating wave diffractor in the main wave direction and the length of the floating wave diffractor.
- the floating wave diffractor, the first asset and the second asset are positioned in a plane defined by the still water surface.
- the first and second asset are positioned within the wave shadow of the floating wave diffractor, e.g. the area where the wave height is reduced due to diffraction of the waves by the floating wave diffractor.
- a preferred embodiment relates to floating wave diffractor to facilitate operations in connection with fixed or floating offshore assets, wherein the wave diffractor comprises a floating body and stationkeeping means, wherein the floating wave diffractor has a length and a beam, wherein the length of the floating wave diffractor is greater than the beam of the floating wave diffractor, wherein stationkeeping means are configured to position the floating wave diffractor against the main wave direction in front of at least a first fixed or floating offshore asset and substantially transverse to the main wave direction, wherein the stationkeeping means allow to move the floating wave diffractor in the longitudinal and transverse direction of the floating wave diffractor and to rotate ,yaw, the floating wave diffractor, and wherein the floating wave diffractor has a beam of 30 m or more.
- the floating wave diffractor has a beam of 35 m, 40 m, 45 m, 50 m, 55 m, 60 m, 65 m, 70 m, 75 m, 80 m, 85 m, 90 m, 95 m, 100 m, or more.
- Another preferred embodiment relates to floating wave diffractor to facilitate operations in connection with fixed or floating offshore assets, wherein the wave diffractor comprises a floating body and stationkeeping means, wherein the floating wave diffractor has a length and a width, wherein the length of the floating wave diffractor is greater than the beam of the floating wave diffractor, wherein stationkeeping means are configured to position the floating wave diffractor against the main wave direction in front of a first and a second fixed or floating offshore asset and substantially transverse to the main wave direction, wherein the stationkeeping means allow to move the floating wave diffractor in the longitudinal and transverse direction of the floating wave diffractor and to rotate ,yaw, the floating wave diffractor, and wherein the floating wave diffractor has a beam of 30 m or more.
- the floating wave diffractor has a beam of 35 m, 40 m, 45 m, 50 m, 55 m, 60 m, 65 m, 70 m, 75 m, 80 m, 85 m, 90 m, 95 m, 100 m, or more.
- the floating body is a barge or pontoon, wherein the barge or pontoon has a beam of 30 m or more.
- the barge or pontoon has a beam of 35 m, 40 m, 45 m, 50 m, 55 m, 60 m, 65 m, 70 m, 75 m, 80 m, 85 m, 90 m, 95 m, 100 m, or more.
- the floating wave diffractor comprises two or more floating bodies, in particular barges or pontoons, coupled in parallel and/or in series.
- the floating wave diffractor further comprises partially filled tanks and/or U-tubes and/or free-flooding anti-roll tanks.
- the floating wave diffractor comprises outward ballast tanks or fixed ballast on the deck near the side walls.
- the floating wave diffractor further comprises heave plates or bilge keels.
- the stationkeeping means comprise a dynamic positioning system.
- Another preferred embodiment relates to a system to facilitate operations in connection with fixed or floating offshore assets, the system comprising at least a first fixed or floating offshore asset, a floating wave diffractor having a length and a beam, wherein the wave diffractor comprises a floating body and stationkeeping means, wherein the length of the floating wave diffractor is greater than the beam of the floating wave diffractor, wherein the stationkeeping means are configured to position the floating wave diffractor against the main wave direction in front of the at least one first fixed or floating asset and substantially transverse to the main wave direction, wherein the stationkeeping means allow to move the floating wave diffractor in the longitudinal and transverse direction of the floating wave diffractor and to rotate the floating wave diffractor, and wherein the floating wave diffractor has a beam of 30 m or more.
- a preferred embodiment relates to a system to facilitate operations in connection with fixed or floating offshore assets, the system comprising a first fixed or floating offshore asset, a second fixed or floating offshore asset to perform operations on the first asset, and a floating wave diffractor having a length and a beam, wherein the wave diffractor comprises a floating body and stationkeeping means, wherein the length of the floating wave diffractor is greater than the beam of the floating wave diffractor, wherein the stationkeeping means are configured to position the floating wave diffractor against the main wave direction in front of a first and a second fixed or floating asset and substantially transverse to the main wave direction, wherein the stationkeeping means allow to move the floating wave diffractor in the longitudinal and transverse direction of the floating wave diffractor and to rotate the floating wave diffractor, and wherein the floating wave diffractor has a beam of 30 m or more.
- the floating wave diffractor has a beam of 35 m, 40 m, 45 m, 50 m, 55 m, 60 m, 65 m, 70 m, 75 m, 80 m, 85 m, 90 m, 95 m, 100 m, or more.
- the operations facilitated on the asset may be the installation of an offshore construction.
- the operations may include constructional work such as construction of, or repair work, or maintenance work on an offshore structure.
- Operations may include constructing the offshore construction with a crane.
- the crane may be a crane vessel.
- the operations may include replacement of components of the offshore construction, for example, the operations may include the replacement of major components e.g. of a fixed or floating wind turbine.
- the operations may include the replacement of a major component, in particular a major component of a wind turbine.
- the second fixed or floating asset may be a maintenance asset or a repair asset. Further, the second asset may be configured to perform or to allow the performance of maintenance and/or repair work.
- the second asset may be a maintenance vessel, a floating crane or a vessel to install major components of offshore wind turbines.
- the second floating or fixed asset may be a barge, a pontoon, a construction platform, diving support vessel, offshore support vessel, offshore supply vessel, or a floating hotel.
- the second asset is maneuvered at a position such that the operations can be facilitated on the first asset.
- the second floating asset may carry equipment to carry out, construction, repair, replacement, or installation work on a fixed or floating offshore asset.
- the equipment may for example be a crane or a floating crane, power generators, pumps, winches and lifting or rigging gear.
- the crane may be part of the second asset or mounted thereon.
- the main wave direction may be the direction form where the waves are beating.
- the main wave direction may be the direction from where the waves are beating that have a significant wave height from 1.5 m up to or equal to 3 m.
- the main wave direction may the main wave direction may be the direction from where the waves are beating that have a significant wave up to or equal to 0.5 m.
- the main wave direction may the main wave direction may be the direction from where the waves are beating that have a significant wave up to or equal to 1 m.
- the main wave direction may the main wave direction may be the direction from where the waves are beating that have a significant wave up to or equal to 1.5 m.
- the main wave direction may be the direction of the waves having a period between 4 s and 10 s.
- the main wave direction may differ from the wind direction.
- the main wave direction may also be the same as the wind direction.
- the main wind direction may be determined manually, for example, by visual determination of the direction from where the waves are coming.
- the determination may also include determining the main wave direction using sensors, such as wave radars, or links to metocean buoys or weather forecast sources.
- a floating wave diffractor may be a floating construction, i.e. a construction where the water mass displaced by the total enclosed volume is greater than the mass of the construction.
- the floating wave diffractor may have a length and a beam, wherein the length is measured in the longitudinal direction. The direction of the beam is perpendicular to the length or longitudinal direction.
- a floating wave diffractor wave may be a barge, a pontoon, or a semi-submersible.
- the length of the floating wave diffractor may be greater than the beam of the floating wave diffractor.
- the floating wave diffractor has a beam of 30 m or more.
- the floating wave diffractor has a beam of 35 m, 40 m, 45 m, 50 m, 55 m, 60 m, 65 m, 70 m, 75 m, 80 m, 85 m, 90 m, 95 m, 100 m, or more.
- the positioning of the floating wave diffractor against the main wave direction in front a first and a second fixed or floating asset includes moving the wave diffractor in the longitudinal and transverse direction of the floating wave diffractor in a plane parallel to the water surface.
- the positioning may also include rotating, i.e. yawing, the floating wave diffractor.
- the transverse direction may be parallel to the direction in which the beam is measured.
- the floating wave diffractor is moved with respect to a plane defined by the still water surface.
- the floating wave diffractor is positioned against the main wave direction with respect to the first and second asset such that the first and second asset are positioned in the wave shadow of the floating wave diffractor.
- the wave shadow of the floating wave diffractor is the area in which the wave height is reduced by the floating wave diffractor.
- the floating wave diffractor reduces the wave height by diffracting the waves. The diffraction is most efficient when the motion of the floating wave diffractor is minimal.
- the floating wave diffractor is positioned using Dynamic Positioning.
- the floating wave diffractor is positioned using a tug, or a marine vessel that is coupled to the floating wave diffractor.
- one or more vessels or tugs can be used to position the floating wave diffractor.
- the floating wave diffractor can have its own drive or drives.
- the drive or drives are azimuth thrusters.
- the floating wave diffractor may have one or more thrusters that are able to position the floating wave diffractor.
- the positioning may be based on GPS information or based on a relative or absolute measurements of the position of the floating wave diffractor with respect to the main wave direction and the position of the first and/or second fixed or floating asset.
- the positioning may include using a mooring system with mooring lines anchored to the seabed to position the floating wave diffractor. Mooring lines may also be connected to fixed offshore structures such as jacket foundations, for example when using the wave diffractor during float-over installations. When mooring the wave diffractor to a fixed offshore structure, fenders may be placed between the structure and the wave diffractor.
- moorings and dynamic positioning may be combined, i.e. so-called thruster assisted mooring (TAM).
- TAM thruster assisted mooring
- the floating wave diffractor may be positioned using its own propulsion system means alternatively the floating wave diffractor may be towed. Further, anchors can hold the floating wave diffractor in position. The positioning may include to move the floating wave diffractor in such a way that the floating wave diffractor is positioned substantially transverse to the main wave direction.
- the longitudinal axis of the floating wave diffractor may be perpendicular or at an angle in a range between 135° and 45° with respect to the main wave direction.
- the angle between the longitudinal axis of the floating wave diffractor and the main wave direction may be in the range of 125° and 55°, more preferable, between 115° and 65°, even more preferably, between 105° and 75° and even more preferably between 95° and 85°.
- the floating wave diffractor comprises a floating body that is a barge or pontoon, wherein the barge or pontoon has a beam width of 30 m or more.
- the floating body may a semi-submersible.
- a semi-submersible may have at least one side closed.
- the floating wave diffractor comprises two or more floating bodies, in particular barges or pontoons, coupled in parallel and/or in series.
- the two or more floating wave diffractor may be coupled by coupling means, which damp the relative motion of the two or more floating bodies with respect to each other.
- the two or more floating bodies are coupled with stiff coupling elements such as bolts or rods.
- the two or more floating bodies could be coupled with mooring ropes.
- the two or more floating bodies could be coupled by means of bolts or pins that are put through an eye or rods that are put through more than one eye.
- one or more hinges are installed on deck of each the floating bodies.
- the hinges may have an eye or eyes.
- Two eyes may be coupled by arranging a pin through the eyes.
- two or more eyes could be arranged on each deck of the two floating bodies such that a rod can be put through each pair of eyes on each floating body thereby preventing tilting of the floating bodies with respect to each other and/or with respect to the longitudinal axis.
- the two or more floating bodies are lashed together.
- the hinges are welded onto the deck or side shell.
- the eyes are welded onto the deck or side shell.
- the floating bodies comprise fenders. Even more preferably, the floating bodies are coupled such that fenders are installed on adjacent sides of the two or more floating bodies. For example, the fenders facilitate force transmission from one floating body to the other.
- the two or more floating bodies are lashed together, for example, with mooring lines. More preferably, the two or more floating bodies are lashed together at the level of the deck such that the two or more floating bodies are tilted with respect to each other in such a way that the lower adjacent edges of the floating bodies are force locked.
- the two or more floating bodies are lashed together and tilted such that the lower edges are frictionally connected.
- the floating bodies comprise external ballast tanks that facilitate tilting of the floating bodies in such a way that the lower edges of the two or more floating bodies are frictionally connected.
- the positioning means position the two or more floating bodies with respect to each other, for example by using driving means or thruster(s).
- the two floating bodies could be positioned in parallel and/ or in series by mooring, anchors or tug vessels.
- the floating wave diffractor further comprises partially filled tanks and/or U-tubes and/or free-flooding anti-roll tanks.
- antiroll tanks are tanks fitted to the floating wave diffractor to improve the tank's response to roll motion.
- the antiroll tanks could be fitted with baffles intended to slow the rate of water transfer from the port side of the tank to the starboard side and the reverse, e.g. the tanks are designed such that a larger amount of water is trapped on the higher side of the floating wave diffractor. Therefore, the roll period of the hull is reduced by acting in opposition to the free surface effect.
- active and/ or passive antiroll tanks could be used.
- a free surface tank or tanks may be used, i.e. that is a partially filled tank that extends across the full breadth of the floating wave diffractor. Its shape, size and internal baffles allow the liquid inside to slosh from side to side in response to the roll motion of the floating wave diffractor. The phasing of the roll moments acting on the floating wave diffractor and the resultant liquid motion are configured such that it reduces the roll motion.
- Free surface tanks have the added advantage that it is possible to vary tank natural frequency by changes in water level and thus accommodate changes in floating bodies metacentric height. Free surface tanks are commonly referred to as "flume" tanks.
- U-tube tanks may be used.
- U-tube tanks are also known as Frahm tanks. These partially filled tanks, for example, consist of two wing tanks connected at the bottom by a substantial crossover duct. The air columns above the liquid in the two tanks are also connected by a duct.
- Frahm tanks These partially filled tanks, for example, consist of two wing tanks connected at the bottom by a substantial crossover duct. The air columns above the liquid in the two tanks are also connected by a duct.
- the floating wave diffractor begins to roll the fluid flows from wing tank to wing tank causing a time varying roll moment to the ship and with careful design this roll moment is of correct phasing to reduce the roll motion of the ship. They do not restrict fore and aft passage as space above and below the water-crossover duct is available for other purposes.
- active U-tube tanks are used.
- the water crossover duct is much larger and the air crossover contains a servo-controlled valve system. Since this valve controls the flow of air very little power is required. When the valve is closed, passage of air from one tank to the other is prevented and the resulting compression of air in the tank prevents flow of water also. When the valve opens, free movement of water and air is possible.
- external stabilizer tanks are used.
- two wing tanks are connected only by an air duct at the top. Water flows in and out of each tank via an opening in the hull to the sea. This eliminates the need for a crossover duct as in the other designs.
- This design promotes corrosion of the tanks due to the explicit interaction with sea water.
- the holes on the hull cause resistance to forward motion.
- the force required to accelerate sea water outside the ship (which is initially at rest) to the speed of the ship as it enters the ship is a substantial drag component (momentum drag) as its magnitude increases with the square of ship speed. More recently, a variation of these tanks has been used in oil drilling rig applications where forward motion is of little relevance.
- an active tank stabilizer is used.
- the active stabilizer tank utilises an axial flow pump to force the water from one side of the floating body to other rather than allowing it to slosh as in passive systems.
- an active tank stabilizer with energy recovery is used. Instead of consuming energy to control the flow inside the tank, the active stabilizer tank utilises a water turbine to produce electricity or drive hydraulic pumps using the water that sloshes into the tank as in passive systems.
- the main advantages to this are operating cost reduction by replacing part of fuel consumption and control of water flow without any mechanical mobile device.
- the different tanks may be combined.
- the floating wave diffractor comprises outward ballast tanks or fixed ballast on the deck near the side walls.
- the floating wave diffractor comprises heave plates or bilge keels. Heave plates or bilge keels may increase the stability of the floating wave diffractor.
- the floating wave diffractor comprises stationkeeping means comprise a dynamic positioning system.
- the stationkeeping system includes a drive or thrusters that position the floating wave diffractor in accordance with information of the dynamic positioning system.
- Fig. 1 shows relevant parameters to derive the stiffness for roll and pitch.
- the stiffness in the degrees of freedom (DOF) roll and pitch is defined for small angles by the distance between vertical center of gravity (VCG) and the metacenter (M), in the following GM.
- I m,T is located at M 44 .
- RAOs motion response amplitude operators
- T z 2 ⁇ m 0 m 2
- a floating wave diffractor works most efficiently, when its own motion is as low as possible.
- the excitation needs to be reduced, damping needs to be increased, the inertia needs to be increased or the natural periods of the system can be shifted further outside the envisaged operational period range. Both methods will lead to reduced response amplitude operators in the typical wind wave period range (i.e. between 4 s and 10 s).
- a wider vessel will lead to an increased weight proportional to the vessel beam and an increased mass moment of inertia proportional to the vessel beam squared.
- Excitation forces can be reduced for the degrees of freedom heave and roll using cancellation effects. For roll, however, this is only valid for very small periods.
- extreme excitation loads (moments) about the longitudinal axis are expected.
- wave periods of 4 s, 6 s, 8 s, and 10 s correspond to a beam of 25 m, 56 m, 100 m, and 156 m, respectively.
- the total excitation forces acting on a floating body are of more complex nature and next to Froude-Krylov excitation assuming undisturbed wave action on a transparent structure also forces due to diffracted waves are of concern. Both, Froude-Krylov force and diffraction forces form the total excitation force of the system.
- Fig. 2 shows the results for the response amplitude operators in heave for a barge in beam seas having a beam of 25 m, 30 m, 35 m, 50 m, 70 m, and 90 m.
- the response amplitude operator - abbreviated RAO in the following - is shown as ratio between the incoming wave amplitude and the heave motion amplitude of the waver diffractor.
- the simulation was performed for a floating wave diffractor having a length of 120 m, a draught of 7 m and a center of gravity at deck level.
- a barge in beam seas means that the waves hit the wave diffractor from the side, e.g. the port side or the starboard side with respect to the longitudinal axis of the wave diffractor. In other words when the wave diffractor is in beam seas the wave diffractor is positioned transverse to the wave direction.
- Fig. 2 shows that increasing the beam of the floating wave diffractor leads to a smaller amplitude response over the overall range of wave periods.
- a wave diffractor having a 25 m beam for example, has a maximum amplitude response of 1.6 m per meter wave amplitude, whereas a wave diffractor of 35 m only experiences a response amplitude of 1.36 m per m wave amplitude.
- increasing the beam only about 10 m decreases the amplitude response already by 15%.
- Fig. 3 shows the response amplitude operators for the roll motion in beam seas.
- the figure shows that increasing the beam from 25 m to 30 m already decreases the roll RAO about 40% with respect to the roll RAO for a 25 m beam.
- a beam of 50 m decreases the roll RAO down to about 15%:
- the RAO has decreased to about 10% in comparison with the maximum value of the RAO for a 25 m beam wave diffractor.
- increasing the width dampens the roll motion caused by the incoming waves. Accordingly, the diffraction efficiency is increased.
- Fig. 4 shows the sway response amplitude operators in beam seas.
- the value of the sway response amplitude operators decreases with increasing beam.
- increasing the beam of the floating wave diffractor reduced the motion of the floating wave diffractor in response to the incoming waves.
- Figs. 5 , 6, and 7 show the heave, roll, and sway excitation in beam seas, i.e. the force acting on the floating wave diffractor per meter wave height normalized to a 30 m beam wave diffractor.
- Fig. 5 shows the heave excitation in beam seas.
- Fig. 5 shows that the excitation forces, normalized to 30 m beam, acting on the floating wave diffractor decrease with increasing beam.
- the decrease in excitation force when changing the beam from 30 m to 35 m is comparable to the decrease achieved when changing the beam from 50 m to 70 m or from 70 m to 90 m. Therefore, the rate of change is highest for values about 30 m beam.
- increasing the beam to more than 30 m already achieves a substantial decrease with respect to the excitation forces.
- Fig. 6 shows that the excitation loads in roll in beam seas increase with the beam of the floating wave diffractor. However, the RAOs shown in Fig. 3 for this roll degree of freedom still decrease with vessel beam, which is connected to the increased mass moment of inertia and the roll damping characteristics for increased vessel beam characteristics.
- Fig. 7 shows the sway excitation in beam seas over the significant wave periods.
- the sway excitation decreases with increasing beam.
- a wave diffractor having 25 m beam experiences the largest excitation.
- a wave diffractor having a 30 m experiences decreased excitation for wave periods of 3.5 s to about 6.5 s, whereas the excitation nearly reaches the values of the 25 m beam case for wave periods of about 6.5 s to 10 s.
- the 35 m wave diffractor experiences smaller excitation forces.
- increasing the beam leads to an increased reduction of the sway excitation.
- the excitation response gets smoother for beams of 50 m 70 m, and 90 m, i.e. the excitation force substantially remains constant over the significant wave periods.
- the influence of the wave period on the excitation decreases for floating wave diffractors having a larger beam.
- the RAOs of a system are a direct measure of the motion response to wave excitation over the entire range of wave periods.
- the simulation results in terms of the RAOs shown in Fig. 2 to 7 show a general improvement of the vessel motion characteristics with increasing beam dimensions.
- the presented total wave excitation forces are normalized with respect the floating wave diffractor beam of the smallest 30 m beam to present a comparable qualitative load comparison. I.e. the excitation forces are multiplied by 30/25, 30/30, 30/35, 30/50, 30/70 and 30/90 for all assessed vessel beam configurations respectively. Specifically for heave and sway excitation the excitation loads decrease with increasing vessel beam while the excitation loads in roll increase with vessel beam.
- Fig. 8 shows an embodiment of a floating wave diffractor, wherein the draught is further increased.
- the floating body of the floating wave diffractor may be a barge. To increase the draft of a usual barge further it is necessary to increase the total deck height in order to maintain sufficient freeboard, which is achieved by the installation of additional buoyance aids on deck of the barge.
- the barge in this embodiment may be submerge, i.e. the main body portion 1 is under water.
- Sponsors or buoyancy aids 2 are arranged on the upper side, for example the deck, of the wave diffractor. In particular, the sponsors or buoyancy aids are arranged on the lateral sides of the floating wave diffractor. Lateral means along the longitudinal direction, i.e.
- the sponsors or buoyancy aids 2 keep the floating wave diffractor floating.
- the sponsors or buoyancy aids increase the total height of the floating wave diffractor. Accordingly, the floating wave diffractor has sufficient freeboard.
- Fig. 9 shows another and compatible embodiment of a floating wave diffractor 91.
- the floating wave diffractor 91 may comprise a control unit 92 for controlling the floating wave diffractor.
- the floating wave diffractor may comprise a power pack 93.
- the power pack 93 may be electric or hydraulic.
- the floating wave diffractor 91 may comprise one or more, preferably at least four, retractable and/or fixed azimuth thrusters 95.
- the thrusters may be powered by the power pack 93.
- the thrusters 95 may be controlled by the control unit 92.
- the floating wave diffractor and, in particular, a floating body of the floating wave diffractor may comprise a deck on which equipment can be stored or installed.
- the deck can be configured or arranged for transport or storage of equipment, for example, major components of an offshore installation can be stored or transported on the deck of the floating wave diffractor.
- the floating wave diffractor may comprises a sponson or buoyancy aid 94 on the deck at the lateral sides of the floating wave diffractor.
- sponsons or buoyancy aids may be installed on both sides.
- a floating wave diffractor may comprise two or more of the floating wave diffractor bodies as described by Fig. 8 or 9 coupled in series and/or in parallel.
- the different coupling arrangements have been discussed previously with respect to other embodiments, but are also applicable here.
- Fig. 10a shows a schematic drawing of three columns of an offshore floating wind energy plant 101.
- the units are millimeter.
- the offshore installations may be arranged in an arbitrary manner.
- Fig. 10b also shows a floating wave diffractor 102 which is positioned against the main wave direction in front of the offshore installations.
- Fig. 10c shows a floating wave diffractor, for example a barge or a pontoon.
- Fig. 11 shows a barge that comprises buoyancy aids, wherein the barge and/or the buoyancy aids may be semi-submerged.
- Fig. 12 shows a simulation of the wave height in the shadow of the wave diffractor.
- the significant wave height is reduced such that maintenance, repair or installation work can be carried out with a second asset that is also positioned within the wave shadow of the wave diffractor.
- the method allows reducing the relative motion between the first and second asset by reducing the significant wave heights present at the positions of the first and second asset. Reducing the relative motion between the first and second asset allows, for example, that the second asset may perform operations on the first asset.
- Fig. 13 shows a floating wave diffractor 131 comprising two floating bodies 132, 133. Tilt motion of the two bodies with respect to each other, e.g. motion about the longitudinal axis, is suppressed by coupling the two floating bodies with pins or bolts 134 that are arranged through eyes.
- Fig. 13 shows a floating wave diffractor 131 comprising two floating bodies 132, 133 coupled together by means of hinges 135 and pins 134.
- Fig. 13a shows the floating wave diffractor 131 in a bow-stern view.
- One or more fenders may be arranged on the floating bodies 132, 133 such that the fenders 143 are arranged between the two or more floating bodies.
- Hinges 135 are arranged on the deck of the floating bodies to couple the floating bodies by using a pin 134. Preferably, the hinges 135 move around the axis of the pin 134.
- a connection between the two floating bodies comprises one hinge 135, wherein one hinge 135 is connected to each of the two floating bodies 132, 133.
- the hinges are coupled by a pin 134, which is arranged through respective eyes 136 of the hinges.
- the pin 134 may be parallel to the longitudinal axis of the floating wave diffractor 131.
- the hinges may extend from the deck of one of the two floating bodies into a direction where the other floating wave diffractor is positioned such that the hinge is coupled to each of the two floating bodies.
- the hinges may extend at an angle about 45 ° from the deck.
- the hinges may extend outside the area of the deck, i.e. above the water.
- Fig. 13b shows two floating bodies 132, 133 coupled by hinges 137, 138, 139 and pins 134 in a view from above.
- Each hinge may comprise at least two elements one of each on each deck of the two floating bodies 132, 133.
- each hinge may comprise three elements 140, 141, 142, e.g. two elements 141, 142 on one of the floating body and one element 140 on the other floating body.
- each hinge 137, 138, 139 may comprise a pair of elements 141, 142 coupled to one floating body and one element 140 coupled to the other floating body.
- Each pair of elements 141, 142 may be spaced apart from each other such that the element 140 extending from the other floating body can be positioned or arranged in the space between the two elements 141, 142 of the pair of elements.
- each element 140, 141, 142 may comprise an eye, for example, the element may comprise an eye at the end of the element that extends away from the floating body, i.e. the end opposite to the end coupled to the floating body.
- the eye 136 of the single element 140 extending from one floating body can be arranged in the space between the two elements 141, 142 extending from the other floating body. More preferably, the eye 136 of the single element 140 is positioned between the eyes of the pairs of elements 141, 142 of each hinge.
- a pin 134 can be arranged through the eyes of the element, i.e. through the eyes of the hinge 137, 138, 139.
- the pins couple the two floating bodies via the hinges.
- the elements may be rigid elements.
- the eyes may for example be welded onto the deck of the floating bodies.
- the eyes are installed at the baseline of the floating wave diffractor.
- the hinges may be installed at the baseline of the floating body instead of the deck as described above.
- the hinges may be installed at the baseline on adjacent sides of each of the floating bodies.
- Fig. 14a shows a floating wave diffractor 141 comprising two bodies 142 that are lashed together, for example with mooring lines, such that the two or more floating bodies 142 are tilted with respect to each other in such a way that the lower edges of the floating bodies are force locked.
- the two or more floating bodies may be tilted with the help of outer ballast tanks, e.g. outer ballast tanks are arranged at the outer sides of the floating bodies, i.e. the sides of the two or more floating bodies that are furthest apart from each other. In this way, there is a force locking connection.
- Fig. 14b shows a similar arrangement, but with additional fenders 143 between the two floating bodies 142.
- mooring lines are at deck level and the fenders are arranged below the deck level.
- Fig. 15a shows a typical arrangement of the present invention.
- the waves are beating from the direction 154 and have periods between 4 s and 10 s.
- the floating wave diffractor 151 is positioned substantially transverse to the main wave direction and against the main wave direction in front of a first asset 153 and a second asset 152.
- the longitudinal axis of the floating wave diffractor is perpendicular to the main wave direction. Accordingly, the direction of the beam of the floating wave diffractor is parallel to the main wave direction.
- the first and second asset are positioned in the wave shadow of the floating wave diffractor, e.g. the area in which the wave height is reduced because the incoming waves are diffracted by the floating wave diffractor.
- the first asset may be a floating offshore wind turbine and the second asset may be a maintenance asset to replace a major component of the offshore wind turbine.
- the floating wave diffractor reduces the significant wave height at the positions of the first and second asset. Therefore, the motion of the first and second asset is reduced. Reducing the motion of the first and second asset also reduces the relative motion of the first and second asset with respect to each other. The relative motion may be the limiting factor when the second asset performs operations on the first asset.
- Fig. 15b shows a view from above of the arrangement shown in Fig. 15a .
- the second asset may be positioned at any position such that the floating wave diffractor is positioned against the main wave direction with respect to both the first and second asset.
- Fig. 15c shows a configuration in which the floating wave diffractor 151 comprises two floating bodies 151a, 151b coupled in parallel.
- the two floating bodies can be two barges or pontoons.
- the barges are positioned against the main wave direction 154 with respect to the position of the first asset 153 and the second asset 152.
- the two floating bodies are positioned transverse to the main wave direction, i.e. the longitudinal axes of both floating bodies is perpendicular to the main wave direction.
- the two barges may have a beam of 30 m.
- the two barges may have a beam of 35 m, 40 m, 50 m, 70 m, 90 m.
- each barge may have a beam as described for one floating wave diffractor as described in previous embodiments.
- the floating wave diffractor comprising the two barges may have a width of 60 m or more.
- Fig. 16 shows the simulation results for the ratio between the motion of a shield asset and an unshielded asset, wherein a floating wave diffractor with 25 m beam is positioned in front of the asset an against the direction of the waves.
- the sway motion of the shielded asset is more than 56% of the motion of the unshielded asset for wave having a period between 3.5 s and 7.5 s.
- the heave motion is decreased to below 50% for a wave period of 4 s, but is above 50% of the motion of the unshielded asset for most of the spectrum.
- Fig. 17 shows the simulation results for the ratio between the motion of a shielded asset and an unshielded asset, wherein a floating wave diffractor with 30 m beam is positioned in front of the asset and against the direction of the waves.
- the sway motion of the shielded asset is below 50.6% compared with the sway motion of the unshielded asset for wave periods below 4.5 s.
- the sway motion of the shielded asset is 50.6% of the unshielded asset for wave periods of 4.5 s.
- the ratio between the heave motions show a similar behavior.
- the unshielded sway motion of the asset is between 88.4% and 90.9% of the motion of the unshielded asset.
- Fig. 18 shows the simulation results for the ratio between the motion of a shielded asset and an unshielded asset, wherein a floating wave diffractor with 35m beam is positioned in front of the asset an against the direction of the waves.
- the sway motion of the shielded asset is slightly below of 52.4% compared with the sway motion of the unshielded asset for wave periods below 5 s.
- the sway motion is reduced to values between 78.7% and 84.7% compared with the unshielded motion for wave periods of more than 6.5 s and up to 7.5 s.
- the motion is also dampened for longer wave periods.
- Fig. 19 shows the simulation results for the ratio between the motion of a shield asset and an unshielded asset, wherein a floating wave diffractor with 50 m beam is positioned in front of the asset an against the direction of the waves.
- the sway motion of the shielded asset is reduced down to below 27.2% of the motion of the unshielded asset for wave periods of 3.5 s. Further, the sway motion of the shielded asset is below 50.5% of the motion of the unshielded asset for wave periods between 3.5 s and 6.5 s.
- the motion of the shielded asset is 49.9% of the motion of the unshielded asset for wave periods of 6.4 s and increases to 50.5% of the motion of the unshielded asset for wave periods of 6.5 s.
- the motion of the shielded asset only increases up 62.6% of the motion of the unshielded asset.
- Fig. 20 shows the simulation results for the ratio between the motion of a shield asset and an unshielded asset, wherein a floating wave diffractor with 70m beam is positioned in front of the asset an against the direction of the waves.
- the sway motion of the shielded asset is reduced down to below 29.3% of the motion of the unshielded asset for wave periods between 3.5 s and 5 s. Further, the sway motion of the shielded asset is below 52% of the motion of the unshielded asset for wave periods between 3.5 s and 6.5 s.
- the motion of the shielded asset only increases up 64.8%. In comparison with Fig. 17 to 19 the roll motion is decreased for wave periods between 3.5 s and 6 s also.
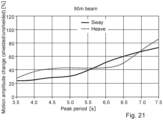
- Fig. 21 shows the simulation results for the ratio between the motion of a shield asset and an unshielded asset, wherein a floating wave diffractor with 90 m beam is positioned in front of the asset an against the direction of the waves.
- the sway motion of the shielded asset is reduced down to below 30% of the motion of the unshielded asset for wave periods between 3.5 s and 5 s. Further, the sway motion of the shielded asset is below 60.7% of the motion of the unshielded asset for wave periods between 3.5 s and 6.5 s.
- the motion of the shielded asset is reduced to 52.3% of the motion of the unshielded asset and for wave periods of 5.5 s the motion of the shielded asset is reduced to 40.2% of the motion of the unshielded asset.
- the motion of the shielded asset only increases up 73.2%.
- the heave motion is decreased for wave periods between 3.5 s and 6 s also.
- Fig. 17 to 21 show that the reduction for wave periods between 4 s and 7.5 s significantly increases for beams of 30 m or more.
- the ratio between the shielded and unshielded sway motion decrease to about 40%.
- Increasing the beam to 35 m leads to a further decrease of the ratio between the shielded and unshielded sway motion down to about 37%.
- Increasing the beam further to 50 m, 70 m or 90 m decreases the ratio between the shielded and unshielded sway motion down to 30%, 30%, 25%.
- the heave motion is also dependent on the beam, as can be seen from Fig. 16 to 21 , significant effects occur at a beam of about 50 m.
- Fig. 16 to 21 significant effects occur at a beam of about 50 m.
- 16 to 21 show the effect of stabilizing the motion of the floating wave diffractor with respect to the sway and heave motion by increasing the beam.
- increasing the beam to 30 m or more increases the efficiency of the floating wave diffractor and allows reducing the motion of the shielded asset significantly.
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- Ocean & Marine Engineering (AREA)
- Architecture (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Revetment (AREA)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP22192966.4A EP4331969A1 (fr) | 2022-08-30 | 2022-08-30 | Brise-lames flottant |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP22192966.4A EP4331969A1 (fr) | 2022-08-30 | 2022-08-30 | Brise-lames flottant |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP4331969A1 true EP4331969A1 (fr) | 2024-03-06 |
Family
ID=83149217
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP22192966.4A Pending EP4331969A1 (fr) | 2022-08-30 | 2022-08-30 | Brise-lames flottant |
Country Status (1)
| Country | Link |
|---|---|
| EP (1) | EP4331969A1 (fr) |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015104026A1 (fr) | 2014-01-10 | 2015-07-16 | C-Bed Holding B.V. | Procédé pour accéder à une construction en mer dans une mer agitée |
| US20200317307A1 (en) * | 2019-04-02 | 2020-10-08 | National Taiwan Ocean University | Wave sheltering vessel |
-
2022
- 2022-08-30 EP EP22192966.4A patent/EP4331969A1/fr active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015104026A1 (fr) | 2014-01-10 | 2015-07-16 | C-Bed Holding B.V. | Procédé pour accéder à une construction en mer dans une mer agitée |
| US20200317307A1 (en) * | 2019-04-02 | 2020-10-08 | National Taiwan Ocean University | Wave sheltering vessel |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102440200B1 (ko) | 부유 해양 플랫폼(floating offshore platform) | |
| EP2493753B1 (fr) | Bateau de transport d'eolienne partiellement submersible | |
| US6378450B1 (en) | Dynamically positioned semi-submersible drilling vessel with slender horizontal braces | |
| KR101535888B1 (ko) | 선박의 능동적 및 수동적 안정화 시스템 및 방법 | |
| US20110174206A1 (en) | Wave attenuating large ocean platform | |
| US6701861B2 (en) | Semi-submersible floating production facility | |
| US6688248B2 (en) | Submersible catamaran | |
| US8752496B2 (en) | Semi-submersible vessel, method for operating a semi-submersible vessel and method for manufacturing a semi-submersible vessel | |
| NO823489L (no) | Flytende offshore-plattform. | |
| EP4331969A1 (fr) | Brise-lames flottant | |
| AU2821199A (en) | Bilge keel and method for fpso type petroleum production systems | |
| RU2200684C2 (ru) | Устройство для придания направления поставленной на якорь плавучей конструкции против направления течения и/или волн | |
| JP7569108B2 (ja) | 洋上発電システム | |
| EP4079621B1 (fr) | Fondation hawt en amont en mer pour bouée spar arrière | |
| NL2033898B1 (en) | A method and system of installing a floating foundation, assembly of floating foundation and ballasting frame, and ballasting frame | |
| NL2031010B1 (en) | A method and system of installing a floating foundation, assembly of floating foundation and ballasting frame, and ballasting frame | |
| KR102631910B1 (ko) | 반잠수 경사식 l형 플로팅 도크선을 사용한 해상 부유식 풍력발전 구조물의 해상 선적 시스템 및 진수공법 | |
| Edelson et al. | Floatover deck installation on spars | |
| GB2137578A (en) | Floating vessels | |
| Jayachandran Nair | Towing of Floating Wind Turbine Systems | |
| Crowle et al. | Transport Vessels for Floating Wind | |
| Korovkin | Mobile offshore wind turbine | |
| Krishnakanth | Concept design of an installation vessel to install fully assembled next generation offshore wind energy turbines | |
| NO842470L (no) | Flytende halvsenk-konstruksjon | |
| Miller et al. | The effect of changes in scale on ship and semi-submersible design |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20240906 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |