EP4247006A2 - Micromechanical acoustic transducer - Google Patents
Micromechanical acoustic transducer Download PDFInfo
- Publication number
- EP4247006A2 EP4247006A2 EP23189034.4A EP23189034A EP4247006A2 EP 4247006 A2 EP4247006 A2 EP 4247006A2 EP 23189034 A EP23189034 A EP 23189034A EP 4247006 A2 EP4247006 A2 EP 4247006A2
- Authority
- EP
- European Patent Office
- Prior art keywords
- bending
- transducer
- actuator
- control signal
- actuators
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000005452 bending Methods 0.000 claims abstract description 260
- 239000000758 substrate Substances 0.000 claims description 75
- 238000004519 manufacturing process Methods 0.000 claims description 22
- 238000000034 method Methods 0.000 claims description 12
- 230000007704 transition Effects 0.000 claims description 4
- 238000001914 filtration Methods 0.000 claims description 2
- 230000010355 oscillation Effects 0.000 abstract description 2
- 239000010410 layer Substances 0.000 description 53
- 239000012528 membrane Substances 0.000 description 22
- 238000013461 design Methods 0.000 description 13
- 239000000463 material Substances 0.000 description 13
- 238000000926 separation method Methods 0.000 description 12
- 230000008901 benefit Effects 0.000 description 9
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 7
- 239000000047 product Substances 0.000 description 7
- 229910052710 silicon Inorganic materials 0.000 description 7
- 239000010703 silicon Substances 0.000 description 7
- 238000001514 detection method Methods 0.000 description 5
- 238000005516 engineering process Methods 0.000 description 5
- 229910052751 metal Inorganic materials 0.000 description 5
- 239000002184 metal Substances 0.000 description 5
- 230000008878 coupling Effects 0.000 description 4
- 238000010168 coupling process Methods 0.000 description 4
- 238000005859 coupling reaction Methods 0.000 description 4
- 238000011161 development Methods 0.000 description 4
- 230000018109 developmental process Effects 0.000 description 4
- 230000000694 effects Effects 0.000 description 4
- 238000005530 etching Methods 0.000 description 4
- 239000011521 glass Substances 0.000 description 4
- 230000008569 process Effects 0.000 description 4
- 238000010586 diagram Methods 0.000 description 3
- 230000005520 electrodynamics Effects 0.000 description 3
- 150000002739 metals Chemical class 0.000 description 3
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N Silicium dioxide Chemical compound O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 2
- 230000003679 aging effect Effects 0.000 description 2
- 238000013459 approach Methods 0.000 description 2
- 238000003491 array Methods 0.000 description 2
- 238000000151 deposition Methods 0.000 description 2
- 239000000428 dust Substances 0.000 description 2
- 230000005284 excitation Effects 0.000 description 2
- 239000012530 fluid Substances 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 238000009413 insulation Methods 0.000 description 2
- 239000012212 insulator Substances 0.000 description 2
- 239000002346 layers by function Substances 0.000 description 2
- 239000003973 paint Substances 0.000 description 2
- 238000002161 passivation Methods 0.000 description 2
- 229920000642 polymer Polymers 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 230000002441 reversible effect Effects 0.000 description 2
- 238000007789 sealing Methods 0.000 description 2
- 230000005236 sound signal Effects 0.000 description 2
- 238000002604 ultrasonography Methods 0.000 description 2
- 229910017083 AlN Inorganic materials 0.000 description 1
- 230000033228 biological regulation Effects 0.000 description 1
- 238000012512 characterization method Methods 0.000 description 1
- 229910052681 coesite Inorganic materials 0.000 description 1
- 238000001816 cooling Methods 0.000 description 1
- 229910052906 cristobalite Inorganic materials 0.000 description 1
- 125000004122 cyclic group Chemical group 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000008021 deposition Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000001312 dry etching Methods 0.000 description 1
- 239000007789 gas Substances 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 230000012447 hatching Effects 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 239000013067 intermediate product Substances 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000003071 parasitic effect Effects 0.000 description 1
- 238000000059 patterning Methods 0.000 description 1
- 229910052697 platinum Inorganic materials 0.000 description 1
- 229910021420 polycrystalline silicon Inorganic materials 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 239000000377 silicon dioxide Substances 0.000 description 1
- 235000012239 silicon dioxide Nutrition 0.000 description 1
- 229910052814 silicon oxide Inorganic materials 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 229910052682 stishovite Inorganic materials 0.000 description 1
- 230000035882 stress Effects 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 239000010409 thin film Substances 0.000 description 1
- 238000012549 training Methods 0.000 description 1
- 229910052905 tridymite Inorganic materials 0.000 description 1
- 238000001039 wet etching Methods 0.000 description 1
Images






















Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04R—LOUDSPEAKERS, MICROPHONES, GRAMOPHONE PICK-UPS OR LIKE ACOUSTIC ELECTROMECHANICAL TRANSDUCERS; DEAF-AID SETS; PUBLIC ADDRESS SYSTEMS
- H04R19/00—Electrostatic transducers
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04R—LOUDSPEAKERS, MICROPHONES, GRAMOPHONE PICK-UPS OR LIKE ACOUSTIC ELECTROMECHANICAL TRANSDUCERS; DEAF-AID SETS; PUBLIC ADDRESS SYSTEMS
- H04R17/00—Piezoelectric transducers; Electrostrictive transducers
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04R—LOUDSPEAKERS, MICROPHONES, GRAMOPHONE PICK-UPS OR LIKE ACOUSTIC ELECTROMECHANICAL TRANSDUCERS; DEAF-AID SETS; PUBLIC ADDRESS SYSTEMS
- H04R19/00—Electrostatic transducers
- H04R19/005—Electrostatic transducers using semiconductor materials
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04R—LOUDSPEAKERS, MICROPHONES, GRAMOPHONE PICK-UPS OR LIKE ACOUSTIC ELECTROMECHANICAL TRANSDUCERS; DEAF-AID SETS; PUBLIC ADDRESS SYSTEMS
- H04R31/00—Apparatus or processes specially adapted for the manufacture of transducers or diaphragms therefor
- H04R31/003—Apparatus or processes specially adapted for the manufacture of transducers or diaphragms therefor for diaphragms or their outer suspension
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04R—LOUDSPEAKERS, MICROPHONES, GRAMOPHONE PICK-UPS OR LIKE ACOUSTIC ELECTROMECHANICAL TRANSDUCERS; DEAF-AID SETS; PUBLIC ADDRESS SYSTEMS
- H04R7/00—Diaphragms for electromechanical transducers; Cones
- H04R7/02—Diaphragms for electromechanical transducers; Cones characterised by the construction
- H04R7/04—Plane diaphragms
- H04R7/06—Plane diaphragms comprising a plurality of sections or layers
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04R—LOUDSPEAKERS, MICROPHONES, GRAMOPHONE PICK-UPS OR LIKE ACOUSTIC ELECTROMECHANICAL TRANSDUCERS; DEAF-AID SETS; PUBLIC ADDRESS SYSTEMS
- H04R7/00—Diaphragms for electromechanical transducers; Cones
- H04R7/02—Diaphragms for electromechanical transducers; Cones characterised by the construction
- H04R7/04—Plane diaphragms
- H04R7/06—Plane diaphragms comprising a plurality of sections or layers
- H04R7/10—Plane diaphragms comprising a plurality of sections or layers comprising superposed layers in contact
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04R—LOUDSPEAKERS, MICROPHONES, GRAMOPHONE PICK-UPS OR LIKE ACOUSTIC ELECTROMECHANICAL TRANSDUCERS; DEAF-AID SETS; PUBLIC ADDRESS SYSTEMS
- H04R7/00—Diaphragms for electromechanical transducers; Cones
- H04R7/26—Damping by means acting directly on free portion of diaphragm or cone
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04R—LOUDSPEAKERS, MICROPHONES, GRAMOPHONE PICK-UPS OR LIKE ACOUSTIC ELECTROMECHANICAL TRANSDUCERS; DEAF-AID SETS; PUBLIC ADDRESS SYSTEMS
- H04R19/00—Electrostatic transducers
- H04R19/02—Loudspeakers
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04R—LOUDSPEAKERS, MICROPHONES, GRAMOPHONE PICK-UPS OR LIKE ACOUSTIC ELECTROMECHANICAL TRANSDUCERS; DEAF-AID SETS; PUBLIC ADDRESS SYSTEMS
- H04R19/00—Electrostatic transducers
- H04R19/04—Microphones
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04R—LOUDSPEAKERS, MICROPHONES, GRAMOPHONE PICK-UPS OR LIKE ACOUSTIC ELECTROMECHANICAL TRANSDUCERS; DEAF-AID SETS; PUBLIC ADDRESS SYSTEMS
- H04R2201/00—Details of transducers, loudspeakers or microphones covered by H04R1/00 but not provided for in any of its subgroups
- H04R2201/003—Mems transducers or their use
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04R—LOUDSPEAKERS, MICROPHONES, GRAMOPHONE PICK-UPS OR LIKE ACOUSTIC ELECTROMECHANICAL TRANSDUCERS; DEAF-AID SETS; PUBLIC ADDRESS SYSTEMS
- H04R2440/00—Bending wave transducers covered by H04R, not provided for in its groups
- H04R2440/01—Acoustic transducers using travelling bending waves to generate or detect sound
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04R—LOUDSPEAKERS, MICROPHONES, GRAMOPHONE PICK-UPS OR LIKE ACOUSTIC ELECTROMECHANICAL TRANSDUCERS; DEAF-AID SETS; PUBLIC ADDRESS SYSTEMS
- H04R2499/00—Aspects covered by H04R or H04S not otherwise provided for in their subgroups
- H04R2499/10—General applications
- H04R2499/11—Transducers incorporated or for use in hand-held devices, e.g. mobile phones, PDA's, camera's
Definitions
- Embodiments of the present invention relate to a micromechanical sound transducer with at least one bending actuator (generally bending transducer) and miniaturized gap as well as to a miniaturized sound transducer with a cascaded bending transducer. Additional exemplary embodiments relate to corresponding manufacturing processes.
- microspeakers are based on the electrodynamic drive system, in which a membrane is deflected using a moving coil moving in a permanent magnetic field.
- a major disadvantage of these conventional electrodynamic sound transducers is their low efficiency and the resulting high power consumption, often in excess of one watt.
- such sound transducers do not have any position sensors, so that the movement of the membrane is unregulated and high distortions occur at higher sound pressure levels.
- Further disadvantages include high series variations and relatively large overall heights, usually over 3 mm.
- MEMS Due to high-precision manufacturing processes and energy-efficient drive principles, MEMS have the potential to overcome these disadvantages and enable a new generation of sound transducers.
- a fundamental problem to date has been the low sound pressure levels of MEMS sound transducers. The primary reason for this is the difficulty of generating sufficiently high lifting movements with the smallest possible dimensions.
- a membrane is required to prevent an acoustic short circuit, which has a negative effect on the overall deflection due to its additional spring stiffness. The latter can be minimized by using very soft and three-dimensionally shaped membranes (e.g. with a torus), which cannot currently be manufactured using MEMS technology and are correspondingly complex and expensive to integrate in a hybrid manner.
- MEMS sound transducers of various designs are discussed in publications and patents, which have not yet resulted in market-ready products due to, among other things, the problems mentioned above. These concepts are based on closed membranes, which are set into vibration and generate sound.
- [Hou13, US2013/156253A1 ] is e.g. B. describes an electrodynamic MEMS sound transducer that requires the hybrid integration of a polymembrane and a permanent magnet ring.
- the concept of piezoelectric MEMS acoustic transducers was introduced in [Yi09, Dej12, US7003125 , US8280079 , US2013/0294636A1 ] shown.
- piezoelectric materials such as PZT, AIN or ZnO were applied directly to silicon-based sound transducer membranes, which, however, do not allow sufficiently large deflections due to their low elasticity.
- Another piezoelectric MEMS sound transducer with a plate-shaped body that is deflected out of the plane in a piston shape via a membrane or several actuators is shown in [ US 20110051985A1 ] shown.
- Digital MEMS sound transducers based on arrays with electrostatically driven membranes, which, however, can only generate sufficiently high sound pressures at high frequencies, are described in [Gla13, US7089069 , US20100316242A1 ] described. Therefore, there is a need for a better approach.
- the object of the present invention is to create a micromechanical sound transducer that represents an improved compromise between sound pressure, frequency response and manufacturing effort.
- Embodiments of the present invention provide a micromechanical sound transducer (eg constructed in a substrate) with a first bending transducer or bending actuator and a second bending transducer or bending actuator.
- the first bending actuator has a free end and, for example, at least one or two free sides and is designed to be stimulated to vertical vibration, for example by an audio signal, and to emit (or record) sound.
- the second bending actuator also has a free end and is arranged relative to the first bending actuator in such a way that the first and second bending actuators lie or are suspended in a common plane. Furthermore, the arrangement is designed such that a gap (e.g.
- the second bending actuator is always excited to oscillate in phase with the first bending actuator, which has the consequence that the gap remains essentially constant over the entire deflection of the bending actuators.
- Embodiments for this aspect of the invention are based on the knowledge that by using several mutually separated bending transducers or actuators, which are separated from each other with a minimal (separation) gap, it is achieved with identical deflection of the two transducers or actuators out of the plane can be ensured that the gap between the two actuators remains almost constantly small (in the micrometer range), so that there are always high viscosity losses in the gap, which as a result prevent an acoustic short circuit between the rear volume and the front volume (of the bending actuator).
- the present concept enables a significant increase in performance.
- a micromechanical sound transducer with a first bending transducer or bending actuator (designed to be excitable to vertical vibration) and a diaphragm element extending vertically (i.e. from the plane of the substrate and thus also from the plane of extension of the bending transducer) to the first bending transducer or bending actuator created.
- the diaphragm element is separated from the free end of the first bending actuator by a gap.
- the diaphragm element can ensure that the distance between the diaphragm element and the free end of the actuator remains approximately constant over the entire range of movement of the transducer or actuator (as a result of the vibration). This achieves the same effect as above, namely that an acoustic short circuit can be prevented due to the high viscous losses at the free end (and possibly also the free sides) or in the gap. As a result, this means that the same advantages in particular with regard to the efficiency of the sound transducer, the broadband capability and the manufacturing costs.
- One exemplary embodiment relates to a manufacturing method of such an actuator with a diaphragm element.
- This method includes the steps of: structuring a layer to form the first bending actuator and producing or depositing the vertical shutter element so that it protrudes beyond the layer of the first bending actuator.
- Vertical is to be understood, for example, as perpendicular (perpendicular to the plane of the substrate) or generally angled relative to the substrate (angle range 75°-105°).
- the first and second bending actuators are similar bending actuators. These can be, for example, flat, rectangular, trapezoidal or generally polygonal bending actuators. According to a further exemplary embodiment, these bending actuators can each have a triangular shape or a circular segment shape. The triangular or circular segment shape is often used in micromechanical sound transducers that include more than two bending actuators. In this respect, according to a further exemplary embodiment, the micromechanical sound transducer includes one or more further bending actuators, such as. B. three or four bending actuators.
- either the simultaneous or in-phase control of the two bending actuators or the provision of the diaphragm element makes it possible, starting from a gap, which (in the idle state) is less than 10% or even less than 5%; 2.5%, 1%, 0.1% or 0.01% of the area of the first bending actuator, the gap remains small over the entire range of movement, that is, even with deflection it is a maximum of 15% or even only 10% (or 1 % or 0.1% or 0.01%) of the area of the first bending actuator.
- the height of the diaphragm element is dimensioned such that it is at least 30% or 50% or preferably 90% or even 100% or more of the maximum deflection of the first bending actuator in linear operation (ie linear mechanical elastic range) or the maximum elastic deflection of the first bending transducer (generally 5-100%).
- the height can be set depending on the gap width (at least 0.5 times, 1 time, 3 times or 5 times the gap width) or depending on the thickness of the bending transducer (at least 0.1 times, 0.5 times times, 1 time, 3 times or 5 times thickness).
- a diaphragm element be arranged opposite the free end, but also, for example, on the non-clamped sides around the bending actuator. This is particularly useful if the bending actuator is a bending actuator clamped on one side.
- the diaphragm element can have a varying geometry in its cross section (e.g. a geometry curved/inclined towards the actuator), so that the slot has a largely constant cross section along the actuator movement.
- the panel can form a mechanical stop in order to prevent mechanical overload.
- a micromechanical sound transducer which includes a control which controls the second bending actuator so that it is excited to oscillate in phase with the first bending actuator.
- a sensor system is provided which detects the vibration and/or the position of the first and/or the second bending actuator in order to enable the controller to control the two bending actuators in phase.
- the actual position of the sound-generating element can be determined using the easily integrated sensors. This is a great advantage and enables significantly more precise and reliable detection. This forms the basis for controlled excitation (closed loop), with which external influences, aging effects and non-linearities can be electronically compensated.
- the bending actuators can also have a so-called “cascading”.
- first and/or the second bending actuator each comprise at least a first and a second bending element. These elements are connected in series.
- “connected in series” means that the first and second bending elements have a clamped end and a free end and the second bending element has its clamped end attacks the free end of the first bending actuator and forms the free end of the entire bending actuator with its free end.
- the connection between the two bending elements can be formed, for example, by a flexible element.
- the micromechanical sound transducer can have an additional frame, which is provided, for example, in the area of the transition between the first and the second bending element. This serves for stiffening and mode decoupling.
- the two bending elements it should be noted that, according to a preferred exemplary embodiment, these are controlled with different control signals, so that, for example, the inner bending element or the inner bending elements are used for higher frequencies, while the further outer bending elements are controlled to oscillate in a lower frequency range .
- a micromechanical sound transducer is created with at least one, preferably two bending actuators, each bending actuator comprising a first and a second bending element which are connected in series.
- each bending actuator can also have a flexible connection instead of a separation gap.
- Embodiments of this aspect of the invention are based on the knowledge that by connecting several bending elements of a bending actuator in series, it can be achieved that different bending actuators are responsible for different frequency ranges.
- the internal bending actuator can be designed for a high frequency range, while the frequency range further out is operated for the low frequency range.
- the concept described enables cascading with several individually controllable actuator stages.
- the frequency-separated control in combination with the piezoelectric drives can achieve significant increases in energy efficiency.
- the good mode decoupling also offers advantages in terms of playback quality. Other advantages include: B. the realization of particularly space-saving multi-way sound transducers.
- the developments as explained above can also be used in accordance with additional exemplary embodiments.
- the features relating to the exact design of the cascading e.g. B. the connecting element or the frame.
- the sub-aspects relate to the flat, rectangular, trapezoidal or triangular (generally polygonal) bending actuator geometry relevant for cascaded transducer configurations.
- Another exemplary embodiment relates to a method for producing a micromechanical sound transducer with cascaded bending actuators.
- the method includes the steps of: providing a first layer that forms the first (and the second) bending actuator with the (respectively) first and second bending elements and connecting the (respectively) first and second bending elements.
- actuators one inside the other and/or to design them of different sizes, for example in order to cover different frequency ranges.
- Fig. 1a shows a sound transducer 1 with a first bending actuator 10 and a second bending actuator 12. Both are arranged or clamped in a plane E1, as can be seen from the clamping 10e and 12e.
- the clamping can be realized in that the bending actuators 10 and 12 are etched out of a common substrate (not shown), so that the bending actuators 10 and 12 are connected to the substrate on one side and there is a (common) cavity (not shown) under the actuators 10 and 12 shown) is formed.
- the bending actuators 10 and 12 shown here can, for example, be prestressed, so that the illustration either shows a rest state or also shows a deflected snapshot (in this case, the rest state is shown by the dashed line).
- the two actuators 10 and 12 are arranged horizontally next to one another, so that the actuators 10 and 12 or at least the clamps 10e and 12e lie in a common plane E1.
- This statement preferably refers to the rest state, whereby in the prestressed case the level E1 refers primarily to the common clamping areas 10e and 12e.
- the two actuators 10 and 12 are arranged opposite each other, so that between them there is a gap 14 of, for example, 5 ⁇ m, 25 ⁇ m or 50 ⁇ m (generally in the range between 1 ⁇ m and 90 ⁇ m, preferably less than 50 ⁇ m or less than 20 ⁇ m).
- This gap 14, which separates the two cantilevered bending actuators 12 and 14, can be referred to as a decoupling gap.
- the decoupling gap 14 varies only minimally over the entire deflection range of the actuators 10 and 12, for example by a factor of 1, 1.5 or 4 (generally in the range 0.5-5), i.e. H. Variation of less than +500%, +300%, +100% or +75% or less than +50% of the gap width (at rest) in order to be able to dispense with additional sealing, as will be explained below.
- the actuators 10 and 12 are preferably driven piezoelectrically.
- Each of these actuators 10 and 12 can, for example, have a layer structure and in addition to the piezoelectric active layers have one or more passive functional layers.
- electrostatic, thermal or magnetic drive principles are also possible. If a voltage is applied to the actuators 12, this or, in the piezoelectric case, the piezoelectric material of the actuators 10 and 12 is deformed and causes the actuators 10 and 12 to bend out of the plane. This bending results in the displacement of air. With a cyclic control signal, the respective actuator 10 and 12 is then excited to oscillate in order to emit (or in the case of a microphone, record) a sound signal.
- the actuators 10 and 12 or the corresponding control signal are designed so that adjacent actuator edges or the free end of the actuators 10 and 12 experience an almost identical deflection from the plane E1.
- the free ends are marked with the reference numbers 10f and 12f. Since the actuators 10 and 12 or the free ends 10f and 12f move parallel to one another, they are in phase. In this respect, the deflection of the actuators 10 and 12 is referred to as being in phase.
- Fig. 1b shows another variant of how an actuator of a micromechanical sound transducer can achieve good sound pressure behavior without a seal.
- the exemplary embodiment Fig. 1b shows the sound transducer 1' comprising the actuator 10, which is firmly clamped at the point 10e.
- the bending actuator 10 may be etched from a substrate (not shown) to form a cavity (not shown) beneath it.
- the free end 10f can be excited to oscillate over an area B.
- a vertically arranged aperture element 22 is provided opposite the free end 10f. This diaphragm element is preferably at least as large or larger than the movement range B of the free end 10f.
- the diaphragm elements 22 preferably extend on the front and/or back of the actuator, that is to say from the plane E1 (substrate plane). viewed from a lower level and a higher level (e.g. perpendicular to the substrate). Between the diaphragm element 22 and the free end 10f there is a gap 14 'comparable to the gap 14 Fig. 1a intended.
- the diaphragm element 22 makes it possible to keep the width of the provided decoupling gap 14 'approximately the same even in the deflected state (see B). Thus, in this configuration with the adjacent edges, no significant openings arise as a result of the deflection, such as in Fig. 1c shown.
- Fig. 1c shows an actuator 10, which is also clamped at point 10e. Opposite, an arbitrarily adjacent structure 23 is provided without vertical extension and without movement. As a result of a deflection of the actuator 10, an opening occurs in the area of the free end 10f of the actuator. This opening is provided with the reference symbol "o". Depending on the deflection, these opening cross sections 14o can be significantly larger than the decoupling slots (cf. Fig. 1a and 1b ) or generally a coupling slot in the idle state. The opening can allow air to flow between the front and back, resulting in an acoustic short circuit.
- the side surface of the aperture element 22 or the aperture element 22 can be adapted to the movement of the actuator 10 in the deflection region B.
- a concave shape would be conceivable.
- Both structure 1 Fig. 1a as well as the structure 1' Fig. 1b makes it possible to prevent the acoustic short circuit by providing means which keep the decoupling gap 14 or 14 'approximately constant over the entire range of movement.
- a piezoelectric material may be used.
- Fig. 2 shows three different cross sections of possible actuator elements in the representations ac.
- Fig. 2a a unimorphic structure is shown.
- a passive layer 10p, 12p, a piezoelectric layer 10pe or 12pe is also applied here.
- Fig. 2b shows a bimorph structure.
- two piezoelectric layers 10pe_1 or 12pe_1 and 10pe_2 or 12pe_2 as well as a passive intermediate layer 10p or 12p are provided.
- Fig. 2c A piezoelectric layer stack is shown, each with two piezoelectric layers 10pe_1 or 12pe_1 and 10pe_2 and 12pe_2.
- piezo actuators shown from the Fig. 2a to 2c So they have in common that they consist of at least two layers, namely a piezoelectric layer 10pe or 12pe and another layer, such as. B. a passive layer 10p, 12p or a further piezoelectric layer 10pe_2, 12pe_2 is formed.
- the piezoelectric layers 10pe, 12pe, 10pe_1, 12pe_1, 10pe_2, 12 pe_2 can be designed as multilayer systems with additional separating layers (see layers 10p, 12p) and/or can themselves be formed from any number of sublayers (see dashed lines).
- the contact is made, for example, by flat or interdigital electrodes.
- a thermal drive can also be used, which can have a multi-layer structure analogous to the piezoelectric actuators.
- the structure of a thermal drive corresponds to the structure as it relates to Fig. 2a-c is explained for piezoelectric layers, whereby thermally active layers are used instead of piezoelectric layers.
- Fig. 3a-c are different actuator arrangements, comprising at least two opposite actuators (cf. Fig. 3b ) explained.
- Fig. 3a shows an actuator arrangement with four actuators 10', 11', 12' and 13'. Each of these actuators 10' to 13' is triangular and clamped on one side along the hypotenuse. According to one exemplary embodiment, the triangles are right-angled triangles, so that the right-angled tips of the actuators 10' to 13' all meet at one point. As a result, the feedback gaps 14 extend between the catheters.
- the individual actuators 10' to 13' can also be further subdivided, as indicated by the dashed lines.
- the clamping is no longer along the hypotenuse, but along one of the legs, while the decoupling gaps then extend along the hypotenuse and along the other leg.
- the triangular design enables the adjacent free ends (separated by the respective column 14) to experience the same deflection as possible.
- Fig. 3b basically shows the top view of the exemplary embodiment Fig. 1a , whereby it is just indicated here that both the actuator 10 and the actuator 12, e.g. B. can be subdivided along the axes of symmetry (see dashed line).
- Fig. 3c shows a further embodiment in which the entire sound transducer is arranged in the shape of a circular segment and has a total of four 90 ° segments as actuators 10 "to 13", which in turn are separated from each other by the separation gap 14.
- the individual actuators 10" to 13" can be further subdivided, as indicated by the dashed lines.
- the separation columns 14 preferably extend along the lines of symmetry. In the exemplary embodiments with more than two actuators, this means that the separation gaps meet in the center of gravity of the total area of the sound transducer according to a preferred exemplary embodiment.
- Fig. 3d shows (in plan view) another version of a micromechanical sound transducer with four (here rectangular or square) actuators 10", 11", 12" and 13", which are in the form of four quadrants of a rectangle or squares are arranged.
- the four actuators 10'''' to 13''' are separated from each other by two intersecting separation gaps 14.
- Each of the actuators 10''' to 13''' is clamped at a corner, ie on both sides, on the outer edge.
- Fig. 4 shows the influence of the gap width.
- Fig. 4 shows the resulting sound pressure level SPL over a frequency range from 500 Hz to 20 kHz for four different gap widths (5 ⁇ m, 10 ⁇ m, 25 ⁇ m and 50 ⁇ m).
- the reduction in the sound pressure level SPL is negligible for gap widths of less than 10 ⁇ m and the structure behaves acoustically like a closed membrane.
- the influence of the gap width decreases significantly.
- the present systems are characterized by significantly higher efficiency due to the decoupling of the individual actuators. The latter manifests itself in very high deflections and sound pressure levels. There are also further advantages in terms of linearity.
- Fig. 5 shows a structure of a micromechanical sound transducer 1" with two actuators 10* and 12*.
- the two actuators 10* and 12* each include an inner stage and an outer stage.
- the actuator 10* has a first actuator element 10a* (outer stage) and a second actuator element 10i* (inner stage).
- the actuator 12* comprises the actuator element 12a* and the actuator element 12i*.
- the outer steps 10a* and 12a* are always clamped, namely over the areas 10e* and 12e*.
- the opposite end of the actuators 10a* and 12a* is referred to as the free end.
- the inner steps 10i* and 12i* are coupled to this free end by means of optional connecting elements 17.
- the coupling is carried out in such a way that the coupling is carried out, for example, via one end of the inner actuator elements 10i* or 12i*, namely in such a way that the opposite ends of the inner actuators 10i* or 12i* serve as free ends.
- this means that the actuator 10* or 12* is constructed in such a way that the inner stage 10i* (or 12i*) is connected in series with the outer stage 10a* (12a*).
- a decoupling gap 14* is formed between the free ends of the elements 10i* and 12i*. This is not necessarily designed for all exemplary embodiments in the same way as the decoupling gap, which is used in connection with the above exemplary embodiments (cf. Fig. 1a ) was explained.
- the actuators 10* and 12* are separated from one another only by a decoupling gap 14 that is a few micrometers wide and are preferably designed in such a way that adjacent structural edges (free edges of the inner elements 10e* and 12e*) During operation, the same deflection (synchronous or in-phase) as possible from the plane E1 (in which the actuators 10* and 12* or the clamping areas 10e* and 12e* are arranged) is experienced.
- An alternative would be to connect the internal ones Elements 10i* and 12i* in the area of the gap shown, for example possible using a flexible material.
- the individual cascaded steps can rest on a frame 19.
- the frame 19 is arranged such that the clamped ends of the inner steps 10i* and 12i* rest on the same frame 19.
- the frame 19 is preferably arranged so that it lies in the area of the connection points (cf. connection elements 17). The frame makes it possible to suppress parasitic vibration modes and unwanted mechanical deformations.
- a micromechanical sound transducer with only one actuator e.g. the actuator 10*
- This actuator can, for example, swing freely relative to a fixed end, so that a gap is formed between them, or can also be flexibly connected to a fixed end.
- a diaphragm such as that in Fig. 1b is explained, conceivable.
- FIG. 6a to 6c Three acoustic transducers according to the embodiment are explained in a schematic top view, in which the configurations are made from Fig. 3a to 3c is expanded to include cascading (two-stage cascading configurations).
- Fig. 6a shows a micromechanical sound transducer with four actuators 10*' to 13*', each of the actuators 10*' to 13*' having two actuator elements 10a*' or 10i*' to 13i*' or 13a*'.
- the inner elements 10i*' to 13i*' each have a triangular shape (with respect to the area), while the outer elements 10a*' to 13a*' have a trapezoidal shape (with respect to the area).
- the smaller leg of the trapezoidal actuator 10a*' to 13a*' is connected to the hypotenuse leg of the triangular actuator 10i*' to 13i*' via connecting elements 17.
- the optional connecting elements are preferably arranged at the corners of the trapezoid or triangle.
- Fig. 6b essentially shows the electromechanical sound transducer in a top view Fig. 5 with the inner actuators 10i* and 12i* and the outer actuators 10a* and 12a*.
- connecting elements 17 are provided at the corners of the rectangular inner and outer elements 10i*, 10a*, 12i* and 12a*.
- Fig. 6c shows the cascaded actuators 10*" to 13*", starting from the circular segment-shaped micromechanical sound transducer, each actuator having an inner actuator element and an outer actuator element.
- the inner actuator elements 10i*" to 13i*" are designed as circular segment-shaped elements, while the outer elements 10a*" to 13a*" are designed as circular disk segments. The connection is again made via connecting elements 17.
- the actuators 10*' to 13*' or 10* to 12* or 10*" to 13*" are separated from one another by separation gaps 14. Additional separation gaps 15 can also be provided between the inner actuators (for example 10i*' and 10a*'), which are only bridged by the connecting elements 17.
- the outer steps for example 10a* and 12a* in Fig. 6b
- the connecting elements can be designed as mechanical spring elements or joints.
- the actuators can also be further subdivided, so that any number of actuators are created per actuator element 10* or 12* (see dashed line).
- the actuators of the outer stage deflect the inner stage out of the plane, with the actuators of the inner stage exerting a further deflection.
- the result is a deflected structure that behaves acoustically like a closed membrane due to the high viscous losses in the decoupling slots.
- the cascaded overall structure can also have three or more stages.
- the different stages can either have identical or different drive signals be controlled.
- the stages can be operated in different frequency ranges and e.g. B. form a multi-way sound transducer with a particularly small space requirement.
- Fig. 7 shows a graph of simulated sound pressure over the frequency range, broken down into inner and outer stages.
- the outer stage serves the low frequency range (maximum sound pressure at around 1500 Hz) while the inner stage serves the higher frequency range (maximum sound pressure at around 10000 Hz).
- a MEMS sound transducer with a chip size of 1x1 cm was assumed and measured at a distance of 10 cm.
- Fig. 8 illustrates the concept of cascading using the example of a concrete two-stage design.
- Fig. 8a the top view is shown, where in Fig. 8b an enlarged detail of the connection area is shown.
- the two-piece design has external actuators 10a*' and internal actuators 10i*'. In terms of configuration, this is in Fig. 8a comparable.
- the decoupling slots 14 are identified by solid lines. As shown in particular in the magnification Fig. 8b can be seen, respective decoupling slots 14 are also provided between the individual stages.
- Fig. 8a also additionally illustrates the frame structure 19*', whose lateral dimensions are smaller than the lateral dimensions of all internal steps 10e*'.
- folded springs serve as connecting elements 17*', the spaces between which have decoupled filling structures 17f*', e.g. B. are made of a material of spring or actuator. Analogously, the spaces 14 between the actuators of both stages also have such filling structures 17f*'.
- Fig. 9 is a deflection profile of the example design obtained using FEM simulation Fig. 8a and b shown in three-dimensional cross section. As illustrated by the deflection values illustrated by hatching, an almost constant deflection profile is formed despite the decoupling slots, which is only interrupted by the narrow decoupling slots 14.
- Fig. 10 will be an extension of the design Fig. 1a as well as the design Fig. 1b explained.
- the configuration Fig. 10a is comparable to the configuration Fig. 1b , whereby the diaphragm element 22 provided opposite the actuator 10 clamped on one side (cf. clamping 10e) is not only provided in the area of the free end 10f, but also extends along the sides of the actuator, i.e. along the entire decoupling slot 14 '.
- the laterally arranged panel elements are marked with the reference numerals 22s.
- Fig. 10b is based on a sound transducer configuration with two opposite actuators 10 and 12, as z. Am Fig. 3b is shown. These are again actuators clamped on one side (cf. clamping 10e or 12e). In this exemplary embodiment, a vertically arranged diaphragm element 22s extends along the lateral decoupling slots 14.
- Fig. 10c shows a further variant in which four actuators 10", 11", 12" and 13" extend from a central surface 16.
- the four actuators 10"" to 13"” are each trapezoidal and are clamped on one side relative to the surface 16 over their short side.
- the four actuators 10"" to 13”” are separated from each other via four diagonally arranged separation gaps 14 (which extend as an extension of the diagonal of the surface 16), so that the long side of the actuators 10"" to 13”” can swing freely.
- a (circumferential) vertically formed aperture element 22s is provided along the long side of the trapezoidal actuators 10"" to 13"".
- Fig. 12 shows a micromechanical sound transducer in array form.
- the micromechanical sound transducer shown here has eight sound transducers 1, for example in relation to Fig. 1a were explained. These eight sound transducers 1 are arranged in two rows and four columns. This means that a large area and thus a high sound pressure can be achieved. If one assumes that each actuator of the sound transducer 1 and a base area of 5 x 5 mm, this creates a “membrane area” of 200 mm 2 , so to speak.
- the sound transducer shown in this way can be scaled as desired, so that sound transducer sizes of, for example, 1 cm in length or more (generally in the range from 1 mm to 50 cm) can be achieved.
- the micromechanical sound transducer 1 is an example Fig. 1a was explained, it should be noted at this point that any other sound transducers as explained above, such as. B. the sound transducer 1 ' Fig. 1b or the cascaded sound transducers Fig. 5 can be used. Other shapes and arrangements are also conceivable.
- the individual actuators explained above can be provided with sensors.
- the sensors make it possible to determine the actual deflection of the actuators. These sensors are typically connected to the control of the actuators, so that the control signal for the individual actuators is readjusted around a feedback loop in such a way that the individual actuators oscillate in phase.
- the sensor system can also have the purpose of detecting non-linearities and distorting the signal during control in such a way that non-linearities can be compensated for or reduced.
- the position detection is preferably carried out via the piezoelectric effect.
- one or more areas of the piezoelectric layer on the actuators can be provided with separate sensor electrodes, via which a voltage or charge signal that is approximately proportional to the deflection can be picked up.
- several piezoelectric layers can also be realized, with at least one layer being partially used for position detection.
- a combination of different piezoelectric materials is also possible, arranged either one above the other or next to one another (e.g. PZT for actuators, AIN for sensors).
- piezoelectric sensor elements it is also possible to integrate thin-film strain gauges or additional electrodes for capacitive position detection. If the actuator structures are made of silicon, piezoresistive silicon resistors can also be integrated directly.
- function materials Piezoelectric layer PZT, PNZT, AlN, AlScN, ZnO, BCZT, KNN Passive layer Si, poly-Si, SiN, SiNO, SiOz, AlN, metals Frame Si, metals, glass, [piezoelectric layer], [passive layer] Dazzle Si, metals, glass, polymers, [piezoelectric layer], [passive layer] Fasteners [passive layer], [piezoelectric layer]
- Such converters can be operated, for example, with a first eigenmode of 10 Hz to 300 kHz.
- the excitation frequency is selected, for example, statically up to 300 kHz.
- the actuator structures described are suitable for areas of application in which sound is to be generated in a frequency range between 10 Hz and 300 kHz with the smallest possible component volumes ( ⁇ 10 cm 3 ). This primarily applies to miniaturized sound transducers for wearables, smartphones, tablets, laptops, headphones, hearing aids but also ultrasound transducers. Overall, other applications in which fluids are displaced can also be considered (e.g. fluid mechanical and aerodynamic drive and guide structures, inkjets).
- Embodiments create a miniaturized device for displacing gases and liquids with at least one bending actuator that can be deflected out of the plane, characterized in that the device contains narrow opening slots with such a high flow resistance that the device is in the acoustic and ultrasonic frequency range (20 Hz to 300 kHz) behaves fluidly almost like a closed membrane.
- the device can include the following features: decoupling slots in the actuator materials, the total length of which accounts for a maximum of 5% of the total actuator area and has an average length-to-width ratio of over 10.
- the device can be designed in such a way that openings created in the deflected state make up less than 10% of the total actuator area, so that a high fluidic separation between the front and back is achieved even without a closed membrane.
- the device can have two or more opposite, separate actuators.
- the actuators can be driven piezoelectrically, electrostatically, thermally, electromagnetically or by means of a combination of several principles. According to an additional embodiment it would also be It is conceivable that the device is designed with two or more actuator stages coupled via connecting elements.
- the device it would also be conceivable for the device to have two or more actuator stages that are controlled with separate signals and thus form a two-way or multi-way sound transducer.
- each actuator element 10a*, 12a*, 10i* and 12i* is an active, individually controllable element. This can be actuated, for example, piezoelectrically or with another principle explained here.
- the device has a frame structure for stiffening and mode decoupling.
- the actuators were explained in particular as actuators clamped on one side. At this point it should be noted that two-sided clamping (cf. Fig. 3d ) or general multi-sided clamping would be conceivable.
- the device can have sensor elements for position detection and control.
- the device can be designed for generating sound or ultrasound in air (gaseous medium), i.e. in the range from 20 Hz to 300 kHz. Further areas of application include the generation and control of air flow, e.g. B. for cooling.
- Fig. 11 a possible manufacturing process for the above sound transducers is explained.
- the exemplary embodiment shown here from the Fig. 11a-d enables the production of the exemplary embodiment as shown, for example, in Fig. 1b is shown.
- the exemplary embodiments from the other figures, in particular, are also used with the method shown here Fig. 1a detectable.
- a passive layer 50p is applied to a substrate 48 before a piezoelectric layer 50pe with two electrodes 50e is provided.
- the substrate 48 may be an SOI (Silicon on Insulator) wafer that includes an SI substrate.
- SiO2 layers 50p are then placed on this with the in Fig. 1b marked insulators 50pi and Si insulation layers, such as.
- the corresponding metal electrodes (Pt, Au, Mo, ....) 50e can then be deposited.
- the electrodes 50e, the PZT 50pe and the insulation layer 50p are then structured. This creates, for example, the trenches 50g in the piezoelectric layer 50pe. Structuring can be done by wet or dry etching. Depending on the desired product design, either the step of structuring or introducing the trench 50g is carried out in such a way that it only has minimal dimensions in order to produce the product Fig. 1a to produce or have larger dimensions, so that the intermediate product shown here is then developed in the direction of the product from 1b.
- a small trench of 50g is applied and then the in Fig. 11c step shown is skipped, then as in Fig. 11d shown to open the back using a single or multi-stage etching process and to expose the movable structures.
- the substrate below the passivation layer 50p is removed, particularly in the area aligned with the structuring piezoelectric actuators 50pe. This creates cavity 48c.
- Fig. 11c illustrates the application of the vertically extending diaphragm elements 57. These are introduced here into the trenches 50g of the piezoelectric layer 50pe.
- the lateral position of the trenches 57 can be selected so that they are aligned with areas of the structured passivation layer 50p, so that, for example, the vertical diaphragm element 75 extends the wall of a trench in the passive layer 50p.
- the diaphragm elements 57 can be applied, for example, by galvanic deposition and preferably in such a way that the diaphragm elements 57 protrude from the layer of piezoelectric elements 50p.
- Fig. 1a explains the single or multi-stage etching of the back of the substrate 48 to produce the cavity 48c. As illustrated here, individual areas of the substrate 48 can remain standing so that the frame 48f is formed within the cavity 48c.
- This framework corresponds to, for example, in Fig. 5 explained framework 19.
- MEMS technologies can be adopted in the manufacturing steps explained, so that the product explained above can be manufactured using conventional manufacturing processes.
- aspects have been described in connection with a device, it is understood that these aspects also represent a description of the corresponding method, so that a block or a component of a device is also to be understood as a corresponding method step or as a feature of a method step. Analogously, aspects that have been described in connection with or as a method step also represent a description of a corresponding block or detail or feature of a corresponding device.
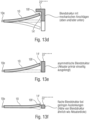
- Fig. 13a shows a schematic cross section of a panel structure.
- the aperture structure 22* consists of several segments 22a*, 22b* and 22c*.
- the segment 22a* extends from the substrate plane (plane of the reference point 10e), in which the bending actuator 10 lies, for example in the rest position, out of the substrate, while the segment 22b* lies in this plane of the reference point 10e.
- the segment 22c* lies in the substrate or extends from the substrate surface into the substrate. All segments 22a*, 22b*, 22c* shown can have different geometries, ie longitudinal and transverse dimensions as well as variable cross sections, according to exemplary embodiments.
- the individual segments 22a*, 22b* and 22c* may also have different materials or material characteristics.
- the segment 22c* and 22b* may be formed by the substrate itself while the segment 22a* is grown.
- middle position in the above and following exemplary embodiments does not necessarily have to correspond to the rest position, but can also be shifted upwards or downwards as desired (electrically or mechanically preloaded).
- Fig. 13b shows another form of the aperture structure, here the aperture structure 22**.
- the aperture structure 22** or in particular the segment that extends out of the substrate plane has a beveled cross section that extends towards the actuator 10. This ensures that the gap 14 'has a relatively constant width regardless of the position of the actuator 10.
- the background to this is that the side of the aperture structure 22** that is directly opposite the actuator 10 extends approximately along the movement path (circular path around the fixed point 10e).
- the aperture 22** can be beveled either only upwards and/or downwards.
- the asymmetrical structure shown here is only an example, so that of course the lower segment of the aperture structure 22** can also be beveled in an analogous manner in order to achieve a symmetrical structure.
- This exemplary embodiment of the diaphragm structure 22** with the slanted inside has the advantage that gap expansion can be reduced or compensated for at larger amplitudes.
- a bevel can e.g. B. can be realized by adapting the paint profile or the etching process.
- Fig. 13c shows a further development of the aperture structure 22** Fig. 13b , namely the aperture structure 22***.
- the panel structure 22*** has a curved/rounded inside on. This rounding extends along the circular arc-shaped movement path of the actuator 10 or the free end 10f of the actuator 10. Even if the rounded inside is only shown here on the side that extends out of the substrate, this rounded inside can of course also be on the aperture structure side in the Substrate level present.
- Analogous to the exemplary embodiment Fig. 13b The gap expansion at large amplitudes is reduced or compensated for by the aperture structure 22*** with the rounded inside. From a manufacturing perspective, rounding can e.g. B. be realized by adjusting the paint profile or the etching profile.
- Fig. 13d shows another aperture structure, namely the aperture structure 22****.
- the cross section at the end of the aperture structure 22**** has a widening or an overhang, which serves as a mechanical stop for the actuator 10 or the free end 10f of the actuator. This stop advantageously enables mechanical overload protection.
- Fig. 13e shows another aperture structure 22*****, in which the aperture structure 22***** is constructed asymmetrically.
- the background to this is that there are actuators 10 that are primarily deflected on one side, so that a vertical expansion of the aperture 22***** is sufficient in one direction, here in the direction out of the substrate plane. Even if the deflection of the actuator 10 or the expansion of the diaphragm structure 22***** is shown here upwards (out of the substrate plane), this can of course also be the other way around according to exemplary embodiments, that is to say that both elements are in the Extend substrate in. It should be noted here that the shift in the rest position of the actuator can be realized by an electrical offset in the control signal or a mechanical projection (e.g. layer stress in the actuator layers).
- Fig. 13f shows an example of a panel structure 22****** with a small expansion.
- the aperture structure 22****** can then be realized as flat if the deflection of the actuator (10) is small.
- the height of the aperture 22****** is in the range of the actuator thickness.
- Fig. 13g shows an example of an aperture structure 22*******, which consists of a substrate area 23s and the actual aperture element 22*******.
- the upper panel structure 22******* can z. B. as a galvanically constructed metal or as a polymer (SU8, BCB, ....) or made of glass or silicon.
- the lower aperture structure 23s consists primarily of the substrate (e.g. silicon or glass) itself and can be provided with additional layers according to further exemplary embodiments.
- Fig. 13h shows another aperture structure without an additional element applied. It is assumed here that the bending actuator 10 oscillates in particular into the substrate plane, so that a diaphragm element that protrudes from the substrate plane can be dispensed with.
- the aperture element consists of the substrate element 23s, which forms the lower aperture structure. It should be noted at this point that, as already explained above, the rest position of the actuator 10 can be shifted downwards via mechanical pretension or an electrical offset, so that the diaphragm element 23s formed here is sufficient. During operation, the actuator can only be deflected downwards, so that no upward aperture is required and the manufacturing effort is then reduced.
- Fig. 13i shows another aperture structure 22********, which essentially consists of a thin layer applied to the substrate element 23s.
- the layer thickness of the diaphragm element 22******** can be in the range of the actuator thickness.
- the substrate 23s can (but does not have to) also act as a panel structure and is flush with the panel structure 22******** or can also have an offset.
- the micromechanical sound transducer is expanded to include a further substrate 220a, 220b and 220c (lid).
- the further substrate 220a, 220b, 220c forms the aperture structure.
- Fig. 14a shows a substrate 220a designed as a lid, which is placed on a substrate 23s above a cavity 23k of the bending actuator 10, so that the bending actuator 10 can swing within the lid 220a or within the space defined by the lid interior 220a and the cavity 23.
- the lid 220a is arranged on the side opposite to the free end such that the inner side wall of the lid 220a is separated from the end 10e by the gap 140. Since in this exemplary embodiment the cover 220a is completely closed, the bending actuator 10, for example, emits the sound through the cavity 23k.
- Fig. 14a represents a cross section through the substrate 220a, with the further substrate extending, for example, in a circular or angular manner around the bending actuator 10 in order to create a (back) volume or generally a cover for it.
- the cover 220a can be produced, for example, by a second structured substrate (i.e. a substrate with a cavity) (cf. reference numeral 221k). This second substrate is then applied to the substrate with the bending actuator 10, so that the cavity 221k is aligned with the cavity 23 at least in some areas (in the area of the gap 140).
- Fig. 14b shows a further exemplary embodiment with a modified cover 220b, with the remaining structure assuming the same actuator 10 and the substrate 23s.
- the lid 220b differs from the lid 220a in that it has optional sound openings 222o and 222s.
- the sound opening 222o or the plurality of sound openings 222o are applied to the main surface of the lid 220b, while the opening 222s is provided laterally. It should be noted at this point that, according to exemplary embodiments, it is also sufficient that an opening, either the opening 222o or the opening 222s, is provided.
- the enclosed air volume in the cavity 221k can be ventilated through these openings 222o and 222s.
- the openings can be used for sound to escape or to enable pressure equalization. Several openings can together form one or more lattice structures that protect the actuator from mechanical influences and dust.
- Fig. 14c shows another sound transducer with a cover 220c which has an opening 222o.
- the bending actuator is provided on another substrate 230s which has a side opening 232s.
- the substrate 230s is applied to a further substrate 233s or a cover 233s, so that the cavity 230k is closed.
- This further substrate 233s can also have optional sound openings 233o.
- the volume is essentially formed by the cavities 221k and 230k and at least one or more openings open.
- the openings can be used for sound to escape or allow for pressure equalization. Multiple openings may cooperate to form one or more grid structures that protect the actuator 10 from mechanical impact and dust.
- the actuator geometry can be combined with one another in any way (e.g. Fig 15f with rounded or triangular actuators).
- Fig. 15a shows a top view of a rounded actuator 100
- Fig. 15b a top view of a triangular actuator 100 shows.
- the same or different actuators 100 can be combined with one another in any way, for example using Fig. 15c, 15d and 15e is shown.
- Fig. 15c shows here triangular-shaped actuators 100_1 to 100_4, which in total describe a square surface, the four actuators 100_1 to 100_4 being separated from one another by a cross-shaped aperture structure 225.
- the slot 145 is again provided between the actuators 100_1 to 100_4 and the aperture structure 225.
- arrangements with 3, 5, 6... actuators would also be conceivable.
- the total area does not necessarily have to be square, but can also be polygonal.
- Fig. 15d shows two opposing square actuators 100_5 and 100_6, which describe a square.
- the square actuators 100_5 and 100_6 each form three free corners, which are limited by the H-shaped panel 225 with the associated slot 140.
- Fig. 15e shows four circular segment-shaped actuators 100_7 to 100_10, which are similar to Fig. 15c are separated from each other by a cross-shaped panel 225 with a slot 140.
- each triangular actuator 100_1 to 100_4 is clamped, while in the exemplary embodiment Fig. 15e
- the circular segment arcs 100_7 to 100_10 are firmly clamped.
- arrangements with 3, 5, 6... actuators would also be conceivable.
- the total area does not necessarily have to be square, but can also be polygonal.
- Fig. 15f combines, for example, three differently shaped but each square actuators 100_11 to 100_13, each of which is clamped on one of the four sides, with three of the four sides forming free ends.
- a labyrinth-shaped panel 225 is provided between the free ends, which separates the actuators 100_11 to 100_13 using the slots 140. All actuators 100_11 to 100_13, for example, have different sizes (areas) and can therefore be designed for different frequency ranges.
- Fig. 15g shows two actuators 100_14 and 100_15, the first 100_14 being a square small actuator.
- the further, larger actuator 100_15 is also square, but has a recess 100_15a for the other actuator 100_14.
- the recess 100_15a is arranged so that both actuators are clamped on the same side.
- These actuators 100_14 and 100_15 can be decoupled in their movement by a slot 140 provided between the two actuators 100_14 and 100_15.
- the larger actuator 100_15 can be used for the low frequency range, for example, while the inner actuator 100_14 can be used for the high frequency range.
- Fig. 15h shows a similar structure of the actuators 100_14 and 100_15, whereby in addition to the separation by means of the slot 140 of the two actuators 100_14 and 100_15, a further aperture 225 is also provided.
- Both exemplary embodiments ( Fig. 15g and 15h ) have in common that the panels 225 including slot 140 are arranged at least along the free ends of the large actuator 100_15 with the recess 100_15a, in which the small actuator 100_14 is arranged. Through such internal nesting or provision of larger and smaller actuators, it is generally possible to cover different frequency ranges with different actuators.
- Fig. 16 shows a schematic top view of a bending actuator 10** clamped on two or more sides (see areas 10e1 and 10e2), which has at least one free side 10f** (here 2). As explained above, this free side 10f** can be acoustically separated by an opposite aperture 22** (here 2, corresponding to the variants explained) with a gap 14** in between.
- a sound transducer for emitting sound (loudspeaker) should be created, which is why a bending actuator was always mentioned.
- the principle is also reversible, so that a microphone is formed by the sound transducer according to an exemplary embodiment, in which the bending transducer (cf. bending actuator) is designed to be excited, for example by air, to oscillate (for example vertically) in order to produce a oscillation depending on this to emit an electrical signal (generally to detect the acoustic waves from the environment).
- a component is created that includes both loudspeaker and microphone based on the concepts explained above.
- the two components can be formed on the same substrate, which is advantageous from a manufacturing perspective.
- a micromechanical sound transducer 1, 1', 1" constructed in a substrate may have the following features: a first bending transducer 10 extending along a plane of the substrate and having a free end 10f or a free side and is designed to be excited to vibrate vertically in order to emit or receive sound; and a diaphragm element 22 extending vertically to the first bending transducer 10 and extending through a gap 14 from the free end 10f or the free side of the first bending transducer 10 is separated.
- the shutter element 22 may protrude from the plane of the substrate.
- the shutter element 22 may protrude from a stationary portion of the substrate.
- the first bending transducer 10 may be excitable to vibrate out of the plane of the substrate or may be excitable to vibrate perpendicular to the plane of the substrate.
- the height of the aperture element 22 may be at least 50% or at least 100% of the maximum deflection of the first bending transducer 10 in linear operation or the maximum elastic deflection of the first bending transducer 10 or at least 3- times a width of the gap 14 or at least 1 times a thickness of the bending transducer 10 or at least 0.1% or 1% of the length of the bending transducer 10.
- the micromechanical sound transducer 1, 1 ', 1" may include a diaphragm element 22 extending vertically to the first bending transducer 10 and separated from the movable sides of the first bending transducer 10 by a gap 14 is.
- the shutter element 22 may have a varying geometry in its cross section.
- the geometry may vary such that a surface facing the bending transducer 10 is curved or inclined along a movement path of the free end upon vertical vibration of the bending transducer 10.
- the shutter element 22 may include a mechanical stop for the bending transducer 10.
- the shutter element 22 may asymmetrically extend out of the plane of the substrate and into the plane of the substrate.
- the shutter element 22 may symmetrically extend out of the plane of the substrate and into the plane of the substrate; and/or wherein the aperture element 22 can have the same height extension out of the plane of the substrate and into the plane of the substrate, starting from the rest position of the bending transducer 10.
- the substrate may form a shutter structure or a part of the shutter structure within the substrate.
- the micromechanical sound transducer 1, 1 ', 1" may have a cover which is placed on the substrate in the area of the first bending transducer 10, so that at least the first bending transducer 10 as well as the Aperture element 22 is covered by the lid or the first substrate 233s.
- the lid 220a, 220b, 220c may form the shutter member 22.
- the micromechanical sound transducer 1, 1', 1" in the lid may have one or more openings; and/or the micromechanical sound transducer 1, 1', 1" in the substrate may have one or have several sound openings.
- the micromechanical sound transducer 1, 1', 1" may include a second bending transducer 12 having a free end disposed in a common plane e1 with the first bending transducer 10, and that Aperture element 22 may be arranged between the free end of the first bending transducer 10 and the free end of the second bending transducer.
- the micromechanical sound transducer 1, 1', 1" may include a second bending transducer 12 having a free end 12f and arranged in a common plane e1 with the first bending transducer 10, so that the free end 10f of the first bending transducer 10 is separated from the free end 10f of the second bending transducer 12 by a gap 14, the second bending transducer 12 being excited in phase with the vertical vibration of the first bending transducer 10.
- the first and second bending transducers 10, 12 may be similar bending transducers.
- the first and/or second bending transducer 12 may be a flat, trapezoidal or rectangular bending transducer.
- the first and/or second bending transducers 10, 12 may be a triangular or circular segment-shaped or rounded bending transducer.
- the micromechanical sound transducer 1, 1', 1" may include one or more further bending transducers arranged in the common area so that their free ends are separated from the free ends 10f, 12f of the first and/or second bending transducer 10, 12 are separated by a gap 14, wherein the at least one further bending transducer is excited to vertical vibration in phase with the vertical vibration of the first and/or second bending transducer 10, 12.
- the micromechanical sound transducer 1, 1 ', 1 may include a controller that controls the first and second bending transducers 12 so that they are excited in phase with the vertical vibration.
- the micromechanical sound transducer 1, 1 ', 1" may comprise a sensor system which is designed to detect the vertical vibration and/or the position of the first and/or the second bending transducer 12 capture.
- the gap 14 may be less than 10% or less than 5% or less than 1% or less than 0.1% or less than 0.01% of the area of the first bending transducer 10.
- the gap 14 may be less than 15% or less than 10%, 5%, 1%, 0.1% or 0.01% of the area of the first bending transducer 10 when deflection.
- the gap 14 may exist in the rest state of the first bending transducer 10.
- the first bending transducer 10 may be clamped on one side or on multiple sides relative to the substrate and/or a base element.
- the first bending transducer 10 or a second bending transducer 12 may each include first and second bending elements connected in series so as to form the respective bending transducer.
- the first bending element may have a clamped end and a free end 10f and the second bending element may engage the free end 10f of the first bending element 10 with its clamped end and the free end with its free end 10f 10f, 12f of the first and/or second bending transducer 12.
- the first bending element may be connected to the second bending element via a flexible element.
- the micromechanical sound transducer may include a frame.
- the frame may be disposed in the region of the transition between the first and second flexure elements.
- the first bending element and the second bending element may be driven with different control signals.
- a method for producing a micromechanical sound transducer constructed in a substrate, having a first bending transducer 10 extending along a plane of the substrate, and a diaphragm element 22 extending vertically to the first bending transducer 10 may comprise the following steps: patterning a layer to form the first flexure transducer 10 to have a free end 10f or side and to be excited to vibrate vertically to emit or receive sound; and realization of the vertical diaphragm element 22 so that it protrudes beyond the layer of the first bending transducer 10 and is separated from the free end 10f of the first bending transducer 10 by a gap 14.
- a micromechanical sound transducer 1, 1', 1" may include a first bending transducer 10 having a free end 10f or side and configured to be excited to vibrate vertically to emit or receive sound ; wherein the first bending transducer 10, 12 can comprise a first and a second bending element which are connected in series in order to form the first bending transducer, wherein the first bending element can each be controlled with a first control signal and the second bending element can be controlled with a second control signal .
- the first control signal may be different from the second control signal.
- the first control signal and the second control signal may be derived from a common source signal and the first control signal may be modified from the second control signal.
- the first control signal may have a different or partially overlapping frequency range from the second control signal, or the first control signal and the second control signal may be derived from a common source signal and the first control signal may undergo different frequency filtering have as the second control signal.
- the first control signal may have a lower frequency range than the second control signal.
- the micromechanical sound transducer 1, 1', 1" may include a second bending transducer 12 having a free end 12f and disposed in a common plane e1 with the first bending transducer 10 , wherein the second bending transducer 10, 12 may include first and second bending elements 10, 12 connected in series so as to form the second bending transducer.
- the first bending element may have a clamped end and a free end and the second bending element may engage the free end of the first bending element 10 with its clamped end and the free end with its free end 10f, 12f of the first and/or second bending transducer 10, 12.
- the first bending member may be connected to the second bending member via a flexible member.
- the micromechanical sound transducer may include a frame.
- the frame may be disposed in the region of the transition between the first and second flexure elements.
- the first bending element and the second bending element may be driven with different control signals.
- the first and/or second bending transducers 10, 12 may be a flat, trapezoidal or rectangular bending transducer.
- the first and/or second bending transducers 12 may be a triangular or circular segment-shaped bending transducer.
- the micromechanical sound transducer 1, 1', 1" may include one or more further bending transducers disposed in the common area so that their free ends are separated from the free ends 10f, 12f of the first and/or second bending transducer 12 are separated by a gap 14, wherein the at least one further bending transducer 12 can be excited to vertical vibration in phase with the vertical vibration of the first and/or second bending transducer 10, 12.
- the gap 14 may be less than 10%, or less than 5%, or 1%, or 0.1%, or less than 0.01% of the area of the first bending transducer 10.
- the gap 14 can be less than 15% or less than 10%, 5%, 1% or 0.1%, or less than 0.01% of the area of the first bending transducer 10 be.
- a method for producing a micromechanical sound transducer according to one of the thirty-fifth to fiftieth aspects may comprise the following steps: providing a first layer in a common plane e1, which has at least the first bending transducer 10 each with one first and a second bending element, so that the first bending transducer 10 has a free end 10f; and connecting the respective first bending element to the second bending element of the respective first bending transducer.
- two bending transducers 10 may be supported with their clamped end opposite a substrate 23s, the geometry of the first of the two bending transducers being enclosed by the geometry of the second of the two bending transducers 10 or enclosed.
- the second of the two bending transducers 10 may include a recess for the first of the two bending transducers 10.
- the two bending transducers may be separated by a slot or a slot with an aperture.
- the two bending transducers may be controllable with two different control signals or with two control signals for two different frequency ranges.
Landscapes
- Engineering & Computer Science (AREA)
- Acoustics & Sound (AREA)
- Signal Processing (AREA)
- Physics & Mathematics (AREA)
- Multimedia (AREA)
- Manufacturing & Machinery (AREA)
- Piezo-Electric Transducers For Audible Bands (AREA)
- Micromachines (AREA)
- Transducers For Ultrasonic Waves (AREA)
- Circuit For Audible Band Transducer (AREA)
- Pressure Sensors (AREA)
- Diaphragms For Electromechanical Transducers (AREA)
- Electrostatic, Electromagnetic, Magneto- Strictive, And Variable-Resistance Transducers (AREA)
Abstract
Ein mikromechanischer Schallwandler umfasst entsprechend einem ersten Aspekt einen ersten Biegewandler mit einem freien Ende und einem zweiten Biegewandler mit einem freien Ende, die in einer gemeinsamen Ebene angeordnet sind, wobei das freie Ende des ersten Biegewandlers von dem freien Ende des zweiten Biegewandlers durch einen Spalt getrennt ist. Der zweite Biegewandler wird phasengleich zu der vertikalen Schwingung des ersten Biegewandlers angeregt. Ein mikromechanischer Schallwandler umfasst gemäß einem zweiten Aspekt einen ersten Biegewandler, der vertikal zur Schwingung angeregt wird und einen vertikal zu dem ersten Biegewandler erstreckendes Blendenelement, das durch einen Spalt von einem freien Ende des ersten Biegewandlers getrennt ist.According to a first aspect, a micromechanical sound transducer comprises a first bending transducer with a free end and a second bending transducer with a free end, which are arranged in a common plane, the free end of the first bending transducer being separated from the free end of the second bending transducer by a gap is. The second bending transducer is excited in phase with the vertical oscillation of the first bending transducer. According to a second aspect, a micromechanical sound transducer comprises a first bending transducer which is vertically excited to vibrate and a diaphragm element which extends vertically to the first bending transducer and is separated from a free end of the first bending transducer by a gap.
Description
Ausführungsbeispiele der vorliegenden Erfindung beziehen sich auf einen mikromechanischen Schallwandler mit mindestens einem Biegeaktuator (allgemein Biegewandler) und miniaturisierten Spalt sowie auf einen miniaturisierten Schallwandler mit einem kaskadierten Biegewandler. Zusätzliche Ausführungsbeispiele beziehen sich auf entsprechende Herstellungsverfahren.Embodiments of the present invention relate to a micromechanical sound transducer with at least one bending actuator (generally bending transducer) and miniaturized gap as well as to a miniaturized sound transducer with a cascaded bending transducer. Additional exemplary embodiments relate to corresponding manufacturing processes.
Während MEMS in nahezu allen Bereichen Einzug erhalten haben, werden miniaturisierte Schallwandler nach wie vor in Feinwerktechnik hergestellt. Diese sogenannten "Microspeaker" basieren auf dem elektrodynamischen Antriebssystem, bei dem mittels einer sich in einem permanenten Magnetfeld bewegenden Tauchspule eine Membran ausgelenkt wird. Ein wesentlicher Nachteil dieser konventionellen elektrodynamischen Schallwandler ist die geringe Effizienz und der daraus folgende hohe Leistungsverbrauch von oftmals über einem Watt. Darüber hinaus verfügen derartige Schallwandler über keinerlei Positionssensorik, sodass die Bewegung der Membran ungeregelt ist und bei höheren Schalldruckpegeln hohe Verzerrungen auftreten. Weitere Nachteile liegen in hohen Serienstreuungen sowie relativ großen Bauhöhen von meist über 3 mm.While MEMS has found its way into almost all areas, miniaturized sound transducers are still manufactured using precision engineering. These so-called “microspeakers” are based on the electrodynamic drive system, in which a membrane is deflected using a moving coil moving in a permanent magnetic field. A major disadvantage of these conventional electrodynamic sound transducers is their low efficiency and the resulting high power consumption, often in excess of one watt. In addition, such sound transducers do not have any position sensors, so that the movement of the membrane is unregulated and high distortions occur at higher sound pressure levels. Further disadvantages include high series variations and relatively large overall heights, usually over 3 mm.
Aufgrund hochpräziser Herstellungsverfahren sowie energieeffizienter Antriebsprinzipien haben MEMS das Potenzial, diese Nachteile zu überwinden und eine neue Generation von Schallwandlern zu ermöglichen. Ein grundlegendes Problem stellen bislang jedoch die zu niedrigen Schalldruckpegel von MEMS-Schallwandlern dar. Die primäre Ursache hierfür liegt in der Schwierigkeit, bei möglichst kleinen Abmessungen ausreichend hohe Hubbewegungen zu erzeugen. Erschwerend kommt dazu, dass zur Unterbindung eines akustischen Kurschlusses eine Membran erforderlich ist, welche sich infolge ihrer zusätzlichen Federsteifigkeit negativ auf die Gesamtauslenkung auswirkt. Letzteres lässt sich durch Einsatz von sehr weichen und dreidimensional geformten Membranen (z. B. mit Torus) minimieren, die derzeit jedoch nicht in MEMS-Technologie hergestellt werden können und entsprechend aufwendig und kostspielig hybrid integriert werden.Due to high-precision manufacturing processes and energy-efficient drive principles, MEMS have the potential to overcome these disadvantages and enable a new generation of sound transducers. However, a fundamental problem to date has been the low sound pressure levels of MEMS sound transducers. The primary reason for this is the difficulty of generating sufficiently high lifting movements with the smallest possible dimensions. To make matters worse, a membrane is required to prevent an acoustic short circuit, which has a negative effect on the overall deflection due to its additional spring stiffness. The latter can be minimized by using very soft and three-dimensionally shaped membranes (e.g. with a torus), which cannot currently be manufactured using MEMS technology and are correspondingly complex and expensive to integrate in a hybrid manner.
In Publikationen und Patentschriften werden MEMS-Schallwandler unterschiedlichster Ausführungen behandelt, woraus u.a. aufgrund o.g. Probleme noch keine marktreifen Produkte hervorgegangen sind. Diese Konzepte basieren auf geschlossenen Membranen, die in Schwingung versetzt werden und Schall generieren. In [Hou13,
Aufgabe der vorliegenden Erfindung ist es, einen mikromechanischen Schallwandler zu schaffen, der einen verbesserten Kompromiss aus Schalldruck, Frequenzgang und Herstellungsaufwand darstellt.The object of the present invention is to create a micromechanical sound transducer that represents an improved compromise between sound pressure, frequency response and manufacturing effort.
Die Aufgabe wird durch die unabhängigen Patentansprüche gelöst.The task is solved by the independent patent claims.
Ausführungsbeispiele der vorliegenden Erfindung schaffen einen mikromechanisch Schallwandler (z.B. in einem Substrat aufgebaut) mit einem ersten Biegewandler bzw. Biegeaktuator sowie einem zweiten Biegewandler bzw. Biegeaktuator. Der erste Biegeaktuator weist ein freies Ende und z.B. mindestens eine oder zwei freie Seiten auf und ist ausgebildet, um beispielsweise durch ein Audiosignal zur vertikalen Schwingung angeregt zu werden und Schall zu emittieren (bzw. aufzunehmen). Der zweite Biegeaktuator weist ebenfalls ein freies Ende auf und ist gegenüber dem ersten Biegeaktuator derart angeordnet, dass der erste und der zweite Biegeaktuator in einer gemeinsamen Ebene liegen bzw. aufgehängt sind. Weiter ist die Anordnung derart ausgestaltet, dass zwischen dem ersten und dem zweiten Biegeaktuator ein Spalt (z. B. im Mikrometerbereich) gebildet wird, der die zwei Biegeaktuatoren voneinander trennt. Der zweite Biegeaktuator wird immer phasengleich zum ersten Biegeaktuator zur Schwingung angeregt, was die Konsequenz hat, dass der Spalt im Wesentlichen über die gesamte Auslenkung der Biegeaktuatoren konstant bleibt.Embodiments of the present invention provide a micromechanical sound transducer (eg constructed in a substrate) with a first bending transducer or bending actuator and a second bending transducer or bending actuator. The first bending actuator has a free end and, for example, at least one or two free sides and is designed to be stimulated to vertical vibration, for example by an audio signal, and to emit (or record) sound. The second bending actuator also has a free end and is arranged relative to the first bending actuator in such a way that the first and second bending actuators lie or are suspended in a common plane. Furthermore, the arrangement is designed such that a gap (e.g. in the micrometer range) is formed between the first and second bending actuators, which separates the two bending actuators from one another. The second bending actuator is always excited to oscillate in phase with the first bending actuator, which has the consequence that the gap remains essentially constant over the entire deflection of the bending actuators.
Ausführungsbeispielen für diesen Aspekt der Erfindung liegt die Erkenntnis zugrunde, dass durch die Verwendung mehrerer voneinander separierter Biegewandler bzw. Aktuatoren, die mit einem minimalen (Separierungs-) Spalt voneinander separiert sind, es bei identischer Auslenkung der zwei Wandler bzw. Aktuatoren aus der Ebene erreicht werden kann, dass der Spalt zwischen den zwei Aktuatoren annährend konstant klein (im Mikrometerbereich) bleibt, so dass immer hohe Viskositätsverluste in dem Spalt vorliegen, die im Resultat einen akustischen Kurzschluss zwischen dem Hintervolumen und dem Vordervolumen (des Biegeaktuators) verhindern. Im Vergleich zu bisherigen, meist auf geschlossenen Membranen basierenden MEMS-Systemen ermöglicht das vorliegende Konzept eine deutliche Leistungssteigerung. Der primäre Grund liegt darin, dass infolge der Aktuatorentkopplung keine Energie für die Verformung von zusätzlichen mechanischen Membranelementen aufgewendet werden muss, wodurch deutlich höhere Auslenkungen und Kräfte möglich sind. Darüber hinaus treten Nichtlinearitäten erst bei deutlich größeren Bewegungsamplituden auf. Während herkömmliche Systeme mitunter komplex geformte Membranen oder Magnete benötigen, die sich bislang nicht in MEMS-Technologie realisieren, sondern nur mit hohem Aufwand hybrid integrieren lassen, lässt sich das vorliegende Konzept mit gängigen Verfahren der Siliziumtechnologie realisieren. Dies bietet signifikante Vorteile bei Herstellung und Kosten. Durch die konzept- und materialbedingt geringe schwingende Masse, lassen sich Systeme mit einem außerordentlich breitem Frequenzbereich und gleichzeitig hohen Bewegungsamplituden realisieren.Embodiments for this aspect of the invention are based on the knowledge that by using several mutually separated bending transducers or actuators, which are separated from each other with a minimal (separation) gap, it is achieved with identical deflection of the two transducers or actuators out of the plane can be ensured that the gap between the two actuators remains almost constantly small (in the micrometer range), so that there are always high viscosity losses in the gap, which as a result prevent an acoustic short circuit between the rear volume and the front volume (of the bending actuator). Compared to previous MEMS systems, which are mostly based on closed membranes, the present concept enables a significant increase in performance. The primary reason is that, as a result of the actuator decoupling, no energy has to be used to deform additional mechanical membrane elements, which means significantly higher deflections and forces are possible. In addition, nonlinearities only occur with significantly larger movement amplitudes. While conventional systems sometimes require complex-shaped membranes or magnets that cannot yet be implemented in MEMS technology but can only be integrated hybrid with great effort, the present concept can be implemented using common silicon technology processes. This offers significant manufacturing and cost advantages. Due to the low oscillating mass due to the concept and material, systems with an extraordinarily wide frequency range and at the same time high movement amplitudes can be implemented.
Entsprechend einem weiteren Aspekt wird ein mikromechanischer Schallwandler mit einem ersten Biegewandler bzw. Biegeaktuator (zur vertikalen Schwingung anregbar ausgelegt) sowie einem vertikal (d.h. aus der Ebene des Substrats und damit auch aus der Erstreckungsebene des Biegewandlers) zu dem ersten Biegewandler bzw. Biegeaktuator erstreckenden Blendenelement geschaffen. Das Blendenelement ist durch einen Spalt (Lücke) von dem freien Ende des ersten Biegeaktuators getrennt.According to a further aspect, a micromechanical sound transducer with a first bending transducer or bending actuator (designed to be excitable to vertical vibration) and a diaphragm element extending vertically (i.e. from the plane of the substrate and thus also from the plane of extension of the bending transducer) to the first bending transducer or bending actuator created. The diaphragm element is separated from the free end of the first bending actuator by a gap.
Die Erkenntnis dieses Aspekts liegt darin, dass durch das Blendenelement über den gesamten Bewegungsbereich des Wandlers bzw. Aktuators (infolge der Schwingung) es erreicht werden kann, dass der Abstand zwischen dem Blendenelement und dem freien Ende des Aktuators annäherungsweise konstant bleibt. Hierdurch wird der gleiche Effekt wie oben erzielt, nämlich dass aufgrund der hohen viskosen Verluste an dem freien Ende (und ggf. auch den freien Seiten) bzw. in dem Spalt ein akustischer Kurzschluss verhindert werden kann. Im Resultat heißt das, dass sich die gleichen Vorteile insbesondere hinsichtlich des Wirkungsgrads des Schallwandlers, der Breitbandigkeit und der Herstellungskosten ergeben.The insight of this aspect is that the diaphragm element can ensure that the distance between the diaphragm element and the free end of the actuator remains approximately constant over the entire range of movement of the transducer or actuator (as a result of the vibration). This achieves the same effect as above, namely that an acoustic short circuit can be prevented due to the high viscous losses at the free end (and possibly also the free sides) or in the gap. As a result, this means that the same advantages in particular with regard to the efficiency of the sound transducer, the broadband capability and the manufacturing costs.
Ein Ausführungsbeispiel bezieht sich auf ein Herstellungsverfahren eines derartigen Aktuators mit Blendenelement. Dieses Verfahren umfasst die Schritte: Strukturieren einer Schicht, um den ersten Biegeaktuator zu formen sowie Herstellen oder Abscheiden des vertikalen Blendenelements, so dass dieses über die Schicht des ersten Biegeaktuators hinausragt. Vertikal ist beispielsweise als senkrecht (senkrecht zur Substratebene) oder allgemein gewinkelt gegenüber dem Substrat (Winkelbereich 75°-105°) zu verstehen.One exemplary embodiment relates to a manufacturing method of such an actuator with a diaphragm element. This method includes the steps of: structuring a layer to form the first bending actuator and producing or depositing the vertical shutter element so that it protrudes beyond the layer of the first bending actuator. Vertical is to be understood, for example, as perpendicular (perpendicular to the plane of the substrate) or generally angled relative to the substrate (angle range 75°-105°).
Zu der Variante mit den mindestens zwei Biegeaktuatoren sei angemerkt, dass entsprechend Ausführungsbeispiel der erste und der zweite Biegeaktuator gleichartige Biegeaktuatoren sind. Diese können beispielsweise flächige, rechteckige, trapezförmige oder allgemein vieleckige Biegeaktuatoren sein. Entsprechend einem weiteren Ausführungsbeispiel können diese Biegeaktuatoren jeweils eine Dreiecksform oder eine Kreissegmentform aufweisen. Die dreieckige oder kreissegmentförmige Form kommt häufig bei mikromechanischen Schallwandlern zum Einsatz, die mehr als zwei Biegeaktuatoren umfassen. Insofern umfasst entsprechend einem weiteren Ausführungsbeispiel der mikromechanische Schallwandler einen oder mehrere weitere Biegeaktuatoren, wie z. B. drei oder vier Biegeaktuatoren.Regarding the variant with the at least two bending actuators, it should be noted that, according to the exemplary embodiment, the first and second bending actuators are similar bending actuators. These can be, for example, flat, rectangular, trapezoidal or generally polygonal bending actuators. According to a further exemplary embodiment, these bending actuators can each have a triangular shape or a circular segment shape. The triangular or circular segment shape is often used in micromechanical sound transducers that include more than two bending actuators. In this respect, according to a further exemplary embodiment, the micromechanical sound transducer includes one or more further bending actuators, such as. B. three or four bending actuators.
Wie oben bereits erläutert, ermöglicht entweder die gleichzeitige bzw. phasengleiche Ansteuerung der zwei Biegeaktuatoren oder das Vorsehen des Blendenelements, dass ausgehend von einem Spalt, die (im Ruhezustand) kleiner 10% oder sogar kleiner 5%; 2,5%, 1%, 0,1% oder 0,01% der Fläche des ersten Biegeaktuators beträgt, der Spalt über den gesamten Bewegungsbereich klein bleibt, d. h. dass er selbst bei Auslenkung maximal 15% oder sogar nur 10% (oder 1% oder 0,1% oder 0,01%) der Fläche des ersten Biegeaktuators ausmacht. Bezüglich der Variante mit dem Blendenelement sei angemerkt, dass die Höhe des Blendenelements derart dimensioniert ist, dass dieses mindestens 30% oder 50% oder bevorzugt 90% oder sogar 100% oder mehr der maximalen Auslenkung des ersten Biegeaktuators im linearen Betrieb (d.h. linearer mechano-elastischer Bereich) oder der maximalen elastischen Auslenkung des ersten Biegewandlers (allgemein 5-100%) beträgt. Alternativ kann die Höhe in Abhängigkeit von der Spaltbreite (mindestens 0,5-mal, 1-mal, 3-mal oder 5-mal Spaltbreite) oder in Abhängigkeit von der Dicke des Biegewandlers (mindestens 0,1-mal, 0,5-mal, 1-mal, 3-mal oder 5-mal Dicke) definiert werden. Diese Dimensionierungsvorschriften für die zwei Varianten ermöglichen über den gesamten Auslenkungsbereich und damit auch über den gesamten Schallpegelbereich die oben erläuterte Funktionalität / Verhinderung von akustischen Kurzschlüssen.As already explained above, either the simultaneous or in-phase control of the two bending actuators or the provision of the diaphragm element makes it possible, starting from a gap, which (in the idle state) is less than 10% or even less than 5%; 2.5%, 1%, 0.1% or 0.01% of the area of the first bending actuator, the gap remains small over the entire range of movement, that is, even with deflection it is a maximum of 15% or even only 10% (or 1 % or 0.1% or 0.01%) of the area of the first bending actuator. With regard to the variant with the diaphragm element, it should be noted that the height of the diaphragm element is dimensioned such that it is at least 30% or 50% or preferably 90% or even 100% or more of the maximum deflection of the first bending actuator in linear operation (ie linear mechanical elastic range) or the maximum elastic deflection of the first bending transducer (generally 5-100%). Alternatively, the height can be set depending on the gap width (at least 0.5 times, 1 time, 3 times or 5 times the gap width) or depending on the thickness of the bending transducer (at least 0.1 times, 0.5 times times, 1 time, 3 times or 5 times thickness). These dimensioning regulations for the two variants enable the The entire deflection range and thus also over the entire sound level range has the functionality/prevention of acoustic short circuits explained above.
Entsprechend einem weiteren Ausführungsbeispiel kann nicht nur ein Blendenelement gegenüber dem freien Ende angeordnet sein, sondern auch beispielsweise an den nichteingespannten Seiten um den Biegeaktuator herum. Dies ist insbesondere dann sinnvoll, wenn der Biegeaktuator ein einseitig eingespannter Biegeaktuator ist.According to a further exemplary embodiment, not only can a diaphragm element be arranged opposite the free end, but also, for example, on the non-clamped sides around the bending actuator. This is particularly useful if the bending actuator is a bending actuator clamped on one side.
Entsprechend einem Ausführungsbeispiel kann das Blendenelement in seinem Querschnitt eine variierende Geometrie (z.B. eine zu dem Aktuator hin gekrümmte/geneigte Geometrie) aufweisen, so dass der Schlitz weitestgehend einen konstanten Querschnitt entlang der Aktuator-Bewegung hat. Entsprechend Ausführungsbeispielen kann die Blende einen mechanischen Anschlag formen, um eine mechanische Überlastung zu verhindern.According to one exemplary embodiment, the diaphragm element can have a varying geometry in its cross section (e.g. a geometry curved/inclined towards the actuator), so that the slot has a largely constant cross section along the actuator movement. According to exemplary embodiments, the panel can form a mechanical stop in order to prevent mechanical overload.
Entsprechend einem weiteren Ausführungsbeispiel wird ein mikromechanischer Schallwandler geschaffen, der eine Steuerung umfasst, die den zweiten Biegeaktuator so ansteuert, dass er phasengleich zu dem ersten Biegeaktuator zur Schwingung angeregt wird. Darüber hinaus kann es entsprechend einem weiteren Ausführungsbeispiel vorteilhaft sein, wenn eine Sensorik vorgesehen wird, die die Schwingung und/oder die Position des ersten und/oder des zweiten Biegeaktuators erfasst, um der Steuerung zu ermöglichen, dass die zwei Biegeaktuatoren gleichphasig angesteuert werden. Im Gegensatz zu bisherigen Systemen, die meist über keine Sensorik verfügen oder nur die Auslenkung des Antriebs (nicht nur Membran) erfassen, lässt sich bei diesem Prinzip mithilfe der gut integrierbaren Sensorik die tatsächliche Position des schallerzeugenden Elements bestimmen. Dies ist von großem Vorteil und ermöglicht eine deutlich genauere und zuverlässigere Detektion. Diese bildet die Grundlage für eine geregelte Anregung (Closed-Loop), mit sich äußere Einflüsse, Alterungseffekte und Nichtlinearitäten elektronisch kompensieren lassen.According to a further exemplary embodiment, a micromechanical sound transducer is created which includes a control which controls the second bending actuator so that it is excited to oscillate in phase with the first bending actuator. In addition, according to a further exemplary embodiment, it can be advantageous if a sensor system is provided which detects the vibration and/or the position of the first and/or the second bending actuator in order to enable the controller to control the two bending actuators in phase. In contrast to previous systems, which usually have no sensors or only record the deflection of the drive (not just the membrane), with this principle the actual position of the sound-generating element can be determined using the easily integrated sensors. This is a great advantage and enables significantly more precise and reliable detection. This forms the basis for controlled excitation (closed loop), with which external influences, aging effects and non-linearities can be electronically compensated.
Entsprechend einem Ausführungsbeispiel können die Biegeaktuatoren auch eine sogenannte "Kaskadierung" aufweisen. Das heißt also, dass der erste und/oder der zweite Biegeaktuator jeweils zumindest ein erstes und ein zweites Biegeelement umfassen. Diese Elemente sind in Serie geschaltet. Entsprechend Ausführungsbeispielen heißt "in Serie geschaltet", dass das erste und zweite Biegeelement ein eingespanntes Ende und eine freies Ende aufweisen und das zweite Biegeelement mit seinem eingespannten Ende an das freie Ende des ersten Biegeaktuators angreift und mit seinem freien Ende das freie Ende des gesamten Biegeaktuators formt. Hierbei kann die Verbindung zwischen den zwei Biegeelementen beispielsweise durch ein flexibles Element gebildet sein. Optional kann der mikromechanische Schallwandler einen zusätzlichen Rahmen aufweisen, der beispielsweise im Bereich des Übergangs zwischen dem ersten und dem zweiten Biegeelement vorgesehen ist. Dieser dient zur Versteifung und zur Modenentkopplung. Bezüglich der zwei Biegeelemente sei angemerkt, dass diese entsprechend einem bevorzugten Ausführungsbeispiel mit unterschiedlichen Steuersignalen angesteuert werden, so dass beispielsweise das innenliegende Biegeelement bzw. die innenliegenden Biegeelemente für höhere Frequenzen genutzt werden, während die weiter außenliegenden Biegeelemente zu einer Schwingung in einem tieferen Frequenzbereich angesteuert werden.According to one exemplary embodiment, the bending actuators can also have a so-called “cascading”. This therefore means that the first and/or the second bending actuator each comprise at least a first and a second bending element. These elements are connected in series. According to exemplary embodiments, “connected in series” means that the first and second bending elements have a clamped end and a free end and the second bending element has its clamped end attacks the free end of the first bending actuator and forms the free end of the entire bending actuator with its free end. The connection between the two bending elements can be formed, for example, by a flexible element. Optionally, the micromechanical sound transducer can have an additional frame, which is provided, for example, in the area of the transition between the first and the second bending element. This serves for stiffening and mode decoupling. With regard to the two bending elements, it should be noted that, according to a preferred exemplary embodiment, these are controlled with different control signals, so that, for example, the inner bending element or the inner bending elements are used for higher frequencies, while the further outer bending elements are controlled to oscillate in a lower frequency range .
Entsprechend einem weiteren Aspekt wird ein mikromechanischer Schallwandler mit zumindest einem, bevorzugt zwei Biegeaktuatoren geschaffen, wobei jeder Biegeaktuator ein erstes und ein zweites Biegeelement umfasst, die in Serie geschaltet sind. Derartige Biegeaktuatoren können entsprechend einem weiteren Ausführungsbeispiel statt einem Separierungsspalt auch eine flexible Verbindung aufweisen.According to a further aspect, a micromechanical sound transducer is created with at least one, preferably two bending actuators, each bending actuator comprising a first and a second bending element which are connected in series. According to a further exemplary embodiment, such bending actuators can also have a flexible connection instead of a separation gap.
Ausführungsbeispiele dieses Aspekts der Erfindung liegt die Erkenntnis zugrunde, dass durch das Inserie-Schalten von mehreren Biegeelementen eines Biegeaktuators es erreicht werden kann, dass unterschiedliche Biegeaktuatoren für unterschiedliche Frequenzbereiche zuständig sind. So kann beispielsweise der innenliegende Biegeaktuator für einen Hochtonfrequenzbereich ausgebildet sein, während der weiter außenliegende Frequenzbereich für den Tiefton betrieben wird. Im Gegensatz zu üblichen Membranansätzen ermöglicht das beschrieben Konzept eine Kaskadierung mit mehreren individuell ansteuerbaren Aktuatorstufen. Darüber hinaus lassen sich durch die frequenzseparierte Ansteuerung in Kombination mit den piezoelektrischen Antrieben deutliche Steigerungen bei der Energieeffizienz erzielen. Die gute Modenentkopplung bietet überdies Vorteile bei der Wiedergabequalität. Weitere Vorteile sind z. B. die Realisierung von besonders platzsparenden Mehrwege-Schallwandlern.Embodiments of this aspect of the invention are based on the knowledge that by connecting several bending elements of a bending actuator in series, it can be achieved that different bending actuators are responsible for different frequency ranges. For example, the internal bending actuator can be designed for a high frequency range, while the frequency range further out is operated for the low frequency range. In contrast to usual membrane approaches, the concept described enables cascading with several individually controllable actuator stages. In addition, the frequency-separated control in combination with the piezoelectric drives can achieve significant increases in energy efficiency. The good mode decoupling also offers advantages in terms of playback quality. Other advantages include: B. the realization of particularly space-saving multi-way sound transducers.
Auch bei diesem Ausführungsbeispiel des Biegeaktuators mit der Kaskadierung sind die Weiterbildungen, wie sie oben erläutert wurden, entsprechend zusätzlichen Ausführungsbeispielen anwendbar. Hierbei sind insbesondere die Merkmale bezüglich der genauen Ausgestaltung der Kaskadierung, z. B. des Verbindungselements oder der Rahmen, zu nennen. Des Weiteren sind die Unteraspekte bezüglich der flächigen, rechteckigen, trapezförmigen oder dreieckigen (allgemein vieleckigen) Biegeaktuatorgeometrie für kaskadierte Schallwandlerkonfigurationen relevant.In this exemplary embodiment of the bending actuator with cascading, the developments as explained above can also be used in accordance with additional exemplary embodiments. In particular, the features relating to the exact design of the cascading, e.g. B. the connecting element or the frame. Furthermore, the sub-aspects relate to the flat, rectangular, trapezoidal or triangular (generally polygonal) bending actuator geometry relevant for cascaded transducer configurations.
Ein weiteres Ausführungsbeispiel bezieht sich auf ein Verfahren zur Herstellung eines mikromechanischen Schallwandlers mit kaskadierten Biegeaktuatoren. Das Verfahren umfasst die Schritte: Bereitstellen einer ersten Schicht, die den ersten (und den zweiten) Biegeaktuator mit dem (jeweils) ersten und zweiten Biegeelement formt und Verbinden der (jeweils) ersten und zweiten Biegeelemente.Another exemplary embodiment relates to a method for producing a micromechanical sound transducer with cascaded bending actuators. The method includes the steps of: providing a first layer that forms the first (and the second) bending actuator with the (respectively) first and second bending elements and connecting the (respectively) first and second bending elements.
Entsprechend einem Ausführungsbeispiel wäre es denkbar, Aktuatoren ineinander zu verschachteln und/oder unterschiedlich groß zu gestalten, z.B. um unterschiedliche Frequenzbereiche abzudecken.According to one exemplary embodiment, it would be conceivable to nest actuators one inside the other and/or to design them of different sizes, for example in order to cover different frequency ranges.
Weiterbildungen sind in den Unteransprüchen definiert. Ausführungsbeispiele der vorliegenden Erfindung wurden beiliegend anhand der Figuren erläutert. Es zeigen:
- Fig. 1a
- eine schematische Darstellung eines mikromechanischen Schallwandlers mit zwei Biegeaktuatoren gemäß einem Basisausführungsbeispiel;
- Fig. 1b
- eine schematische Darstellung eines mikromechanischen Schallwandlers mit einem Biegeaktuator sowie einem vertikalen Blendenelement gemäß einem weiteren Basisausführungsbeispiel;
- Fig. 1c
- eine schematische Darstellung eines Biegeaktuators mit einer beliebig angrenzenden Struktur zur Illustration der Verbesserung der Konzepte aus den
Fig. 1a und1b gegenüber dem Stand der Technik; - Fig. 2a-c
- schematische Querschnitte möglicher Aktuatorelemente gemäß Ausführungsbeispiel;
- Fig. 3a-d
- schematische Draufsichten von Biegeaktuatorkonfigurationen gemäß Ausführungsbeispielen;
- Fig. 4
- ein schematisches Diagramm zur Illustration eines simulierten Schalldruckpegels für unterschiedliche Ausführungsbeispiele;
- Fig. 5
- eine schematische Darstellung eines mikromechanischen Schallwandlers mit zwei Biegeaktuatoren, die jeweils eine Kaskadierung umfassen, gemäß Ausführungsbeispielen;
- Fig. 6a-c
- schematische Draufsichten auf Biegeaktuatorkonfigurationen mit Kaskadierung gemäß Ausführungsbeispielen;
- Fig. 7
- ein schematisches Diagramm zur Illustration eines simulierten Schalldruckpegels mit einer Biegeaktuatorkonfiguration mit Kaskadierung;
- Fig. 8a,b
- schematische Ansichten oder Teilansichten einer Draufsicht auf eine Biegeaktuatorkonfiguration mit Kaskadierung gemäß einem weiteren Ausführungsbeispiel;
- Fig. 9
- ein schematisches Diagramm zur Illustration einer mittels FEM-simulierten Auslenkung eines mikromechanischen Schallwandlers mit Kaskadierungen gemäß einem Ausführungsbeispiel;
- Fig. 10a-c
- schematische Draufsichten auf Biegeaktuatoren mit seitlich angeordneten Blendenelementen gemäß Ausführungsbeispielen;
- Fig. 11a-d
- schematische Darstellungen zur Illustration eines Prozessablaufs bei der Herstellung eines mikromechanischen Schallwandlers gemäß Ausführungsbeispielen;
- Fig. 12
- eine schematische Darstellung eines Arrays mit einer Vielzahl an mikromechanischen Schallwandlern gemäß einem Ausführungsbeispiel;
- Fig. 13a-i
- zeigt schematische Darstellungen von unterschiedlichen Implementierungen der in
Fig. 1b erläuterten Blendenstrukturen gemäß Ausführungsbeispielen; - Fig. 14a-c
- schematische Darstellungen von mikromechanischen Schallwandlern mit einem Deckel gemäß zusätzlichen Ausführungsbeispielen;
- Fig. 15a-h
- schematische Darstellungen von Draufsichten auf mikromechanische Schallwandler gemäß Ausführungsbeispielen; und
- Fig. 16
- eine schematische Darstellung eines zweiseitig eingespannten mikromechanischen Schallwandler gemäß Ausführungsbeispielen.
- Fig. 1a
- a schematic representation of a micromechanical sound transducer with two bending actuators according to a basic embodiment;
- Fig. 1b
- a schematic representation of a micromechanical sound transducer with a bending actuator and a vertical diaphragm element according to a further basic embodiment;
- Fig. 1c
- a schematic representation of a bending actuator with an arbitrarily adjacent structure to illustrate the improvement of the concepts from the
Fig. 1a and1b compared to the state of the art; - Fig. 2a-c
- schematic cross sections of possible actuator elements according to the exemplary embodiment;
- Fig. 3a-d
- schematic top views of bending actuator configurations according to exemplary embodiments;
- Fig. 4
- a schematic diagram illustrating a simulated sound pressure level for different embodiments;
- Fig. 5
- a schematic representation of a micromechanical sound transducer with two bending actuators, each comprising a cascade, according to exemplary embodiments;
- Fig. 6a-c
- schematic top views of bending actuator configurations with cascading according to exemplary embodiments;
- Fig. 7
- a schematic diagram illustrating a simulated sound pressure level with a cascading bending actuator configuration;
- Fig. 8a,b
- schematic views or partial views of a top view of a bending actuator configuration with cascading according to a further exemplary embodiment;
- Fig. 9
- a schematic diagram to illustrate an FEM-simulated deflection of a micromechanical sound transducer with cascades according to an exemplary embodiment;
- Fig. 10a-c
- schematic top views of bending actuators with laterally arranged diaphragm elements according to exemplary embodiments;
- Fig. 11a-d
- schematic representations to illustrate a process flow in the production of a micromechanical sound transducer according to exemplary embodiments;
- Fig. 12
- a schematic representation of an array with a plurality of micromechanical sound transducers according to an exemplary embodiment;
- Fig. 13a-i
- shows schematic representations of different implementations of the in
Fig. 1b explained aperture structures according to exemplary embodiments; - Fig. 14a-c
- schematic representations of micromechanical sound transducers with a cover according to additional exemplary embodiments;
- Fig. 15a-h
- schematic representations of top views of micromechanical sound transducers according to exemplary embodiments; and
- Fig. 16
- a schematic representation of a double-sided clamped micromechanical sound transducer according to exemplary embodiments.
Bevor nachfolgend Ausführungsbeispiele der vorliegenden Erfindung anhand der beiliegenden Zeichnungen im Detail erläutert werden, sei darauf hingewiesen, dass gleichwirkende Elemente und Strukturen mit gleichen Bezugszeichen versehen sind, so dass die Beschreibung derer aufeinander anwendbar bzw. austauschbar ist.Before exemplary embodiments of the present invention are explained in detail below with reference to the accompanying drawings, it should be noted that elements and structures with the same effect are provided with the same reference numerals so that the description of them can be applied to one another or interchangeable.
Die beiden Aktuatoren 10 und 12 sind gegenüberliegend angeordnet, so dass zwischen denselben ein Spalt 14 von beispielsweise von 5 µm, 25 µm oder 50 µm (allgemein im Bereich zwischen 1 µm und 90 µm, bevorzugt kleiner 50 µm oder kleiner 20 µm) besteht. Dieser Spalt 14, der die zwei einseitig eingespannten Biegeaktuatoren 12 und 14 trennt, kann als Entkopplungsspalt bezeichnet werden. Der Entkopplungsspalt 14 variiert über den gesamten Auslenkungsbereich der Aktuatoren 10 und 12 nur minimal, z.B. um Faktor 1, 1,5 oder 4 (allgemein im Bereich 0,5-5), d. h. Variation kleiner +500%, +300%, +100% oder +75% oder kleiner +50% der Spaltbreite (im Ruhezustand), um so auf eine zusätzliche Abdichtung verzichten zu können, wie nachfolgend ausgeführt werden wird.The two
Die Aktuatoren 10 und 12 werden vorzugsweise piezoelektrisch angetrieben. Jeder dieser Aktuatoren 10 und 12 kann beispielsweise einen Schichtaufbau aufweisen und neben den piezoelektrischen aktiven Schichten ein oder mehrere passive Funktionsschichten aufweisen. Alternativ sind auch elektrostatische, thermische oder magnetische Antriebsprinzipien möglich. Wird an den Aktuatoren 12 eine Spannung angelegt, so verformt sich dieser bzw. im piezoelektrischen Fall das piezoelektrische Material der Aktuatoren 10 und 12 und bewirkt eine Verbiegung der Aktuatoren 10 und 12 aus der Ebene hinaus. Diese Verbiegung resultiert in einer Verdrängung von Luft. Bei einem zyklischen Steuerungssignal wird dann so der jeweilige Aktuator 10 und 12 zur Schwingung angeregt, um ein Schallsignal zu emittieren (oder im Fall eines Mikrophons aufzunehmen). Die Aktuatoren 10 und 12 bzw. das entsprechende Ansteuerungssignal ist so ausgelegt, dass jeweils benachbarte Aktuatorränder bzw. das freie Ende der Aktuatoren 10 und 12 eine nahezu identische Auslenkung aus der Ebene E1 erfahren. Die freien Enden sind mit den Bezugszeichen 10f und 12f gekennzeichnet. Da sich die Aktuatoren 10 und 12 bzw. die freien Ende 10f und 12f parallel zueinander bewegen, befinden sich selbige in Phase. Insofern wird die Auslenkung der Aktuatoren 10 und 12 als gleichphasig bezeichnet.The
In der Folge bildet sich in der Gesamtstruktur aller Aktuatoren 10 und 12 im angetriebenen Zustand ein stetiges Auslenkungsprofil, welches lediglich durch die engen Entkopplungsschlitze 14 unterbrochen ist. Da die Spaltbreite der Entkopplungsschlitze im Mikrometer-Bereich liegt, werden hohe Viskoverluste an den Spaltseitenwänden 10w und 12w erreicht, so dass die hier durchtretende Luftströmung stark gedrosselt wird. Damit kann der dynamische Druckausgleich zwischen der Vorderseite und der Rückseite der Aktuatoren 10 und 12 nicht schnell genug erfolgen, so dass ein akustischer Kurzschluss unabhängig von der Aktuatorfrequenz reduziert wird. Dies bedeutet, dass sich eine eng geschlitzte Aktuatorstruktur im betrachteten akustischen Frequenzbereich strömungstechnisch wie eine geschlossene Membran verhält.As a result, a constant deflection profile is formed in the overall structure of all
Das Blendenelement 22 ermöglicht die Breite der vorgesehenen Entkopplungsspalte 14' auch im ausgelenkten Zustand (vgl. B) annähernd gleich zu halten. Somit entstehen bei dieser Konfiguration mit den benachbarten Rändern keine signifikanten Öffnungen infolge der Auslenkung, wie beispielsweise in
Entsprechend Ausführungsbeispielen kann die Seitenfläche des Blendenelements 22 oder das Blendenelement 22 angepasst an die Bewegung des Aktuators 10 im Auslenkungsbereich B sein. Konkret wäre eine konkave Form denkbar.According to exemplary embodiments, the side surface of the
Sowohl die Struktur 1 aus
Wie oben erläutert, kann entsprechend einem Ausführungsbeispiel ein piezoelektrisches Material verwendet werden.
In
Alle gezeigten Piezoaktuatoren aus den
Entsprechend einem alternativen Ausführungsbeispiel kann auch ein thermische Antrieb zum Einsatz kommen, der analog zu den piezoelektrischen Aktuatoren einen Mehrschichtaufbau aufweisen kann. Grundsätzlich entspricht dann der Aufbau eines thermischen Antriebs dem Aufbau, wie er in Bezug auf
Bezug nehmend auf
Entsprechend Ausführungsbeispielen können die einzelnen Aktuatoren 10' bis 13' auch noch weiter untergliedert sein, wie mittels den gestrichelten Linien angedeutet ist. Bei Untergliederung ist natürlich dann die Einspannung nicht mehr entlang der Hypotenuse, sondern entlang einer der Katheten, während sich die Entkopplungsspalte dann entlang der Hypotenuse und entlang der anderen Kathete erstrecken.According to exemplary embodiments, the
Unabhängig davon, ob es sich um vier oder acht Aktuatoren handelt, ermöglicht die dreieckige Ausgestaltung, dass die benachbarten freien Enden (getrennt durch die jeweilige Spalte 14) eine möglichst gleiche Auslenkung erfahren.Regardless of whether there are four or eight actuators, the triangular design enables the adjacent free ends (separated by the respective column 14) to experience the same deflection as possible.
Alle Ausführungsbeispiele aus den
Des Weiteren sei an dieser Stelle angemerkt, dass sich, wie anhand der Ausführungsbeispiele aus
Bezug nehmend auf
Bezug nehmend auf
Wie hier dargestellt, sind immer die äußeren Stufen 10a* und 12a* eingespannt, nämlich über die Bereiche 10e* und 12e*. Das gegenüberliegende Ende der Aktuatoren 10a* und 12a* wird als freies Ende bezeichnet. An dieses freie Ende sind mittels optionaler Verbindungselemente 17 die inneren Stufen 10i* und 12i* angekoppelt. Die Ankopplung erfolgt derart, dass die Ankopplung beispielsweise wiederum über eine Ende der inneren Aktuatorelemente 10i* bzw. 12i* ausgeführt ist, nämlich so, dass die gegenüberliegenden Enden der inneren Aktuatoren 10i* bzw. 12i* als freie Enden dienen. In anderen Worten ausgedrückt heißt das also, dass der Aktuator 10* bzw. 12* derart aufgebaut ist, dass die innere Stufe 10i* (bzw. 12i*) gegenüber der äußeren Stufe 10a* (12a*) in Serie geschaltet ist.As shown here, the
Wie hier dargestellt, wird zwischen den freien Enden der Elemente 10i* und 12i* ein Entkopplungsspalt 14* ausgebildet. Dieser ist nicht zwingend für alle Ausführungsbeispiele so ausgeführt, wie der Entkopplungsspalt, welcher im Zusammenhang mit obigen Ausführungsbeispielen (vgl.
Entsprechend optionalen Ausführungsbeispielen können die einzelnen kaskadierten Stufen auf einem Rahmen 19 aufliegen. In diesem Ausführungsbeispiel ist der Rahmen 19 derart angeordnet, dass die eingespannten Enden der inneren Stufen 10i* und 12i* auf demselben Rahmen 19 aufliegen. Allgemein heißt es aber, dass der Rahmen 19 bevorzugt so angeordnet ist, dass dieser im Bereich der Verbindungsstellen (vgl. Verbindungselemente 17) liegt. Der Rahmen ermöglicht es, parasitäre Schwingungsmoden sowie ungewollte mechanische Deformationen zu unterdrücken.According to optional exemplary embodiments, the individual cascaded steps can rest on a
Auch wenn bei obigen Ausführungsbeispielen davon ausgegangen wurde, dass zwei Aktuatoren 10* und 12* mit jeweils innerer und äußerer Aktuatorstufe mit den Aktuatorelementen 10a*, 10i*, 12a*, 12i* vorgesehen sind, sei an dieser Stelle angemerkt, dass entsprechend weiteren Ausführungsbeispielen ein mikromechanischer Schallwandler mit nur einem Aktuator (z. B. der Aktuator 10*) geschaffen wird, der die erste Stufe 10a* und die zweite Stufe 10i* in entsprechender Serienanordnung aufweist. Dieser Aktuator kann beispielsweise gegenüber einem festen Ende frei schwingen, so dass ein Spalt dazwischen gebildet wird oder auch flexibel mit einem festen Ende verbunden sein. Entsprechend einem weiteren Ausführungsbeispiel wäre auch eine Blende, wie sie beispielsweise in
Bezug nehmend auf
Alle Ausführungsbeispiele aus den
Wie im Zusammenhang mit
Nachdem nun die Struktur der Schallwandler erläutert wurde wird nachfolgend auf deren Funktion eingegangen: Im angetriebenen Zustand lenken die Aktuatoren der äußeren Stufe die innere Stufe aus der Ebene aus, wobei die Aktuatoren der inneren Stufe eine weitere Auslenkung ausüben. Es resultiert eine ausgelenkte Struktur, die sich aufgrund der hohen viskosen Verluste in den Entkopplungsschlitzen akustisch wie eine geschlossene Membran verhält.Now that the structure of the sound transducers has been explained, their function will be discussed below: In the driven state, the actuators of the outer stage deflect the inner stage out of the plane, with the actuators of the inner stage exerting a further deflection. The result is a deflected structure that behaves acoustically like a closed membrane due to the high viscous losses in the decoupling slots.
Alternativ, kann die kaskadierte Gesamtstruktur auch drei oder mehr Stufen aufweisen. Die unterschiedlichen Stufen können wahlweise mit identischen oder verschiedenen Antriebssignalen angesteuert werden. Im Falle verschiedener Antriebssignale können die Stufen in unterschiedlichen Frequenzbereichen betrieben werden und z. B. einen Mehrwege-Schallwandler mit besonders geringem Platzbedarf bilden.Alternatively, the cascaded overall structure can also have three or more stages. The different stages can either have identical or different drive signals be controlled. In the case of different drive signals, the stages can be operated in different frequency ranges and e.g. B. form a multi-way sound transducer with a particularly small space requirement.
An dieser Stelle sein angemerkt, dass sich das in Bezug auf
Bezug nehmend auf die obigen Ausführungsbeispiele sei angemerkt, dass die in den
Wie anhand der
Im Gegensatz zu
Wie anhand von
In
Bezug nehmend auf
Sowohl das Ausführungsbeispiel aus
Auch wenn bei dem hier dargestellten Ausführungsbeispiel
Entsprechend weiteren Ausführungsbeispielen können die einzelnen oben erläuterten Aktuatoren mit Sensoren versehen werden. Die Sensoren ermöglichen die tatsächliche Auslenkung der Aktuatoren zu bestimmen. Diese Sensoren sind typischerweise mit der Steuerung der Aktuatoren verbunden, so dass um eine Feedbackschleife das Steuersignal für die einzelnen Aktuatoren derart nachgeregelt wird, dass die einzelnen Aktuatoren gleichphasig schwingen. Die Sensorik kann auch den Sinn haben, Nicht-Linearitäten aufzuspüren und bei der Ansteuerung das Signal derart zu verzerren, dass Nicht-Linearitäten kompensiert bzw. reduziert werden können.According to further exemplary embodiments, the individual actuators explained above can be provided with sensors. The sensors make it possible to determine the actual deflection of the actuators. These sensors are typically connected to the control of the actuators, so that the control signal for the individual actuators is readjusted around a feedback loop in such a way that the individual actuators oscillate in phase. The sensor system can also have the purpose of detecting non-linearities and distorting the signal during control in such a way that non-linearities can be compensated for or reduced.
Zum Hintergrund: Da die Aktuatoren gleichzeitig das schallerzeugendes Element bilden, lassen sich Alterungseffekte und Nichtlinearitäten im Betrieb direkt messen und ggf. elektronisch kompensieren. Dies stellt einen großen Vorteil gegenüber üblichen membranbasierten Systemen dar, bei denen entweder keine Sensorik vorhanden ist oder aber nur das Verhalten an den Antrieben, nicht jedoch an dem schallerzeugenden Membranelement detektiert werden kann.Background: Since the actuators also form the sound-generating element, aging effects and non-linearities can be measured directly during operation and, if necessary, compensated electronically. This represents a major advantage over usual membrane-based ones Systems in which either no sensors are present or only the behavior of the drives can be detected, but not of the sound-generating membrane element.
Die Positionsdetektion erfolgt vorzugsweise über den piezoelektrischen Effekt. Hierfür können ein oder mehrere Bereiche der piezoelektrischen Schicht auf den Aktuatoren mit separaten Sensorelektroden versehen werden, über die ein näherungsweise zur Auslenkung proportionales Spannungs- oder Ladungssignal abgegriffen werden kann. Darüber hinaus können auch mehrere piezoelektrische Schichten realisiert werden, wobei zumindest eine Schicht partiell für die Positionsdetektion verwendet wird. Es ist auch eine Kombination verschiedener piezoelektrischer Materialien möglich, die entweder übereinander oder nebeneinander angeordnet sind (z. B. PZT für Aktuatoren, AIN für Sensoren).The position detection is preferably carried out via the piezoelectric effect. For this purpose, one or more areas of the piezoelectric layer on the actuators can be provided with separate sensor electrodes, via which a voltage or charge signal that is approximately proportional to the deflection can be picked up. In addition, several piezoelectric layers can also be realized, with at least one layer being partially used for position detection. A combination of different piezoelectric materials is also possible, arranged either one above the other or next to one another (e.g. PZT for actuators, AIN for sensors).
Als Alternative zu piezoelektrischen Sensorelementen ist auch die Integration von Dünnfilm-Dehnungsmessstreifen oder zusätzlichen Elektroden für eine kapazitive Positionserfassung möglich. Werden die Aktuatorstrukturen aus Silizium hergestellt, so lassen sich auch piezoresistive Silizium-Widerstände direkt integrieren.As an alternative to piezoelectric sensor elements, it is also possible to integrate thin-film strain gauges or additional electrodes for capacitive position detection. If the actuator structures are made of silicon, piezoresistive silicon resistors can also be integrated directly.
Alle oben genannten Aspekte haben gemein, dass ein membranloses und vollständig zu MEMS-Herstellungsprozessen kompatibles Konzept zur Erzeugung von hohen Schalldrücken geschaffen wird. Alle Ausführungsbeispiele ermöglichen eine besonders geringe Baugröße. Die optionale Kaskadierung ermöglicht die Realisierung von integrierten Mehrweg-Schallwandlern. Die Steuerung kann entsprechend Weiterentwicklungen durch integrierte Positionssensoren derart ausgebildet sein, dass der emittierte Schall eine minimierte Verzerrung aufweist.All of the above-mentioned aspects have in common that a membrane-free concept for generating high sound pressures that is completely compatible with MEMS manufacturing processes is created. All exemplary embodiments enable a particularly small size. The optional cascading enables the realization of integrated multi-way sound transducers. According to further developments, the control can be designed using integrated position sensors in such a way that the emitted sound has minimized distortion.
In nachfolgender Tabelle werden mögliche Materialien für die einzelnen Funktionselemente aufgezählt.
Mögliche Abmessungen stellen sich wie folgt dar:
Derartige Wandler sind beispielsweise mit einem ersten Eigenmode von 10 Hz bis 300 kHz betreibbar. Die Anregungsfrequenz ist beispielsweise statisch bis 300 kHz gewählt.Such converters can be operated, for example, with a first eigenmode of 10 Hz to 300 kHz. The excitation frequency is selected, for example, statically up to 300 kHz.
Die beschriebenen Aktuator-Strukturen eigenen sich für Anwendungsgebiete, in denen bei möglichst geringen Bauteilvolumina (< 10 cm3) Schall in einem Frequenzbereich zwischen 10 Hz und 300 kHz erzeugt werden soll. Dies trifft in erster Linie auf miniaturisierte Schallwandler für Wearables, Smartphones, Tablets, Laptops, Kopfhörer, Hörgeräte aber auch Ultraschallwandler zu. Insgesamt kommen auch andere Anwendungen in Betracht, bei denen Fluide verdrängt werden (z. B. strömungsmechanische und aerodynamische Antriebs- und Führungsstrukturen, Inkjets).The actuator structures described are suitable for areas of application in which sound is to be generated in a frequency range between 10 Hz and 300 kHz with the smallest possible component volumes (<10 cm 3 ). This primarily applies to miniaturized sound transducers for wearables, smartphones, tablets, laptops, headphones, hearing aids but also ultrasound transducers. Overall, other applications in which fluids are displaced can also be considered (e.g. fluid mechanical and aerodynamic drive and guide structures, inkjets).
Ausführungsbeispiele schaffen eine miniaturisierte Vorrichtung zur Verdrängung von Gasen und Flüssigkeiten mit mindestens einem aus der Ebene auslenkbaren Biegeaktuator, dadurch gekennzeichnet, dass die Vorrichtung enge Öffnungsschlitze mit derart großem Strömungswiderstand enthält, so dass die Vorrichtung sich im akustischen und Ultraschall-Frequenzbereich (20 Hz bis 300 kHz) strömungstechnisch annährend wie eine geschlossene Membran verhält.Embodiments create a miniaturized device for displacing gases and liquids with at least one bending actuator that can be deflected out of the plane, characterized in that the device contains narrow opening slots with such a high flow resistance that the device is in the acoustic and ultrasonic frequency range (20 Hz to 300 kHz) behaves fluidly almost like a closed membrane.
Gemäß weiteren Ausführungsbeispielen kann die Vorrichtung folgende Merkmale umfassen: Entkopplungsschlitzen in den Aktuatormaterialien, deren Gesamtlänge maximal 5% der gesamten Aktuatorfläche ausmachen und ein mittleres Länge-zu-Breite-Verhältnis von über 10 aufweisen. Zusätzlich kann entsprechen Ausführungsbeispielen die Vorrichtung derart ausgelegt ist, dass im ausgelenkten Zustand entstehende Öffnungen weniger als 10% der gesamten Aktuatorfläche ausmachen, so dass auch ohne geschlossene Membran eine hohe fluidische Trennung zwischen Vorder- und Rückseite erzielt wird.According to further exemplary embodiments, the device can include the following features: decoupling slots in the actuator materials, the total length of which accounts for a maximum of 5% of the total actuator area and has an average length-to-width ratio of over 10. In addition, according to exemplary embodiments, the device can be designed in such a way that openings created in the deflected state make up less than 10% of the total actuator area, so that a high fluidic separation between the front and back is achieved even without a closed membrane.
Gemäß einem weiteren Ausführungsbeispiel kann die Vorrichtung zwei oder mehr gegenüberliegende voneinander separierte Aktuatoren aufweisen.According to a further exemplary embodiment, the device can have two or more opposite, separate actuators.
Gemäß einem weiteren Ausführungsbeispiel können die Aktuatoren piezoelektrisch, elektrostatisch, thermisch, elektromagnetisch oder mittels einer Kombination mehrere Prinzipien angetrieben werden. Gemäß einem zusätzlichen Ausführungsbeispiel wäre es auch denkbar, dass die Vorrichtung mit zwei oder mehr über Verbindungselemente gekoppelten Aktuatorstufen ausgebildet ist.According to a further exemplary embodiment, the actuators can be driven piezoelectrically, electrostatically, thermally, electromagnetically or by means of a combination of several principles. According to an additional embodiment it would also be It is conceivable that the device is designed with two or more actuator stages coupled via connecting elements.
Gemäß einem weiteren Ausführungsbeispiel wäre es auch denkbar, dass die Vorrichtung zwei oder mehr Aktuatorstufen aufweist, die mit getrennten Signalen angesteuert werden und somit einen Zweiwege- oder Mehrwege-Schallwandler bilden.According to a further exemplary embodiment, it would also be conceivable for the device to have two or more actuator stages that are controlled with separate signals and thus form a two-way or multi-way sound transducer.
Bezug nehmend auf das Ausführungsbeispiel aus
Gemäß einem weiteren Ausführungsbeispiel hat die Vorrichtung eine Rahmenstruktur zur Versteifung und Modenentkopplung.According to a further exemplary embodiment, the device has a frame structure for stiffening and mode decoupling.
Bei obigen Ausführungsbeispielen wurde die Aktuatoren insbesondere als einseitig eingespannte Aktuatoren erläutert. An dieser Stelle sei darauf hingewiesen, dass auch zweiseitige Einspannungen (vgl.
Weitere Ausführungsbeispiele schaffen eine Vorrichtung mit Strömungsblenden zur Verringerung der Öffnungsquerschnitte zwischen Vorder- und Rückseite im ausgelenkten Zustand. Gemäß einem weiteren Ausführungsbeispiel kann die Vorrichtung Sensorelemente zur Positionserfassung und -Regelung aufweisen.Further exemplary embodiments create a device with flow diaphragms to reduce the opening cross sections between the front and back in the deflected state. According to a further exemplary embodiment, the device can have sensor elements for position detection and control.
Gemäß zusätzlichen Ausführungsbeispielen kann die Vorrichtung zur Schall- oder Ultraschallerzeugung in Luft (gasförmiges Medium) und das heißt also im Bereich von 20 Hz bis 300 kHz ausgebildet sein. Weitere Anwendungsgebiete sind die Erzeugung und Steuerung von Luftströmung, z. B. zur Kühlung.According to additional exemplary embodiments, the device can be designed for generating sound or ultrasound in air (gaseous medium), i.e. in the range from 20 Hz to 300 kHz. Further areas of application include the generation and control of air flow, e.g. B. for cooling.
Nachfolgend wird Bezug nehmend auf
In dem ersten in
Bei dem Substrat 48 kann es sich um einen SOI-Wafer (Silicon on Insulator) handeln, der ein SI-Substrat umfasst. Auf dieses werden dann SiO2-Schichten 50p mit dem in
In einem nächsten Schritt, welcher in
Um das Produkt aus
Um ein Produkt, wie es in Bezug auf
Nach dem Aufbringen der Blendenelemente 57 erfolgt dann, wie oben bereits in Bezug auf das Ausführungsbeispiel aus
Bei den erläuterten Herstellungsschritten können MEMS-Technologien übernommen werden, so dass das oben erläuterte Produkt mit herkömmlichen Herstellungsverfahren herstellbar ist.MEMS technologies can be adopted in the manufacturing steps explained, so that the product explained above can be manufactured using conventional manufacturing processes.
Obwohl manche Aspekte im Zusammenhang mit einer Vorrichtung beschrieben wurden, versteht es sich, dass diese Aspekte auch eine Beschreibung des entsprechenden Verfahrens darstellen, sodass ein Block oder ein Bauelement einer Vorrichtung auch als ein entsprechender Verfahrensschritt oder als ein Merkmal eines Verfahrensschrittes zu verstehen ist. Analog dazu stellen Aspekte, die im Zusammenhang mit einem oder als ein Verfahrensschritt beschrieben wurden, auch eine Beschreibung eines entsprechenden Blocks oder Details oder Merkmals einer entsprechenden Vorrichtung dar.Although some aspects have been described in connection with a device, it is understood that these aspects also represent a description of the corresponding method, so that a block or a component of a device is also to be understood as a corresponding method step or as a feature of a method step. Analogously, aspects that have been described in connection with or as a method step also represent a description of a corresponding block or detail or feature of a corresponding device.
Nachfolgend werden ausgehend von dem Basisausführungsbeispiel aus
Entsprechend weiteren Ausführungsbeispielen wäre es natürlich auch denkbar, dass mehr als die drei dargestellten Segmente 22a*, 22b* und 22c* vorgesehen sind.According to further exemplary embodiments, it would of course also be conceivable that more than the three segments 22a*, 22b* and 22c* shown are provided.
Es sei angemerkt, dass die mittlere Position bei obigen und nachfolgenden Ausführungsbeispielen nicht zwingend der Ruhelage entsprechen muss, sondern auch beliebig nach oben oder unten verschoben sein kann (elektrisch oder mechanisch vorgespannt).It should be noted that the middle position in the above and following exemplary embodiments does not necessarily have to correspond to the rest position, but can also be shifted upwards or downwards as desired (electrically or mechanically preloaded).
Dieses Ausführungsbeispiel der Blendenstruktur 22** mit der angeschrägten Innenseite hat den Vorteil, dass eine Spaltaufweitung bei größeren Amplituden verringert bzw. kompensiert werden kann. Eine Anschrägung kann aus herstellungstechnischer Sicht z. B. durch Anpassung des Lackprofils oder des Ätzprozesses realisiert werden.This exemplary embodiment of the
Bezugnehmend auf
Bei diesem Ausführungsbeispiel sei darauf hingewiesen, dass bei allen obigen Ausführungsbeispielen bzw. bei der Erläuterung derer im Wesentlichen davon ausgegangen wird, dass der Schall aus dem Substrat heraus emittiert wird. Selbstverständlich ist es entsprechend Ausführungsbeispielen auch denkbar, dass, der Schall durch das Substrat bzw. durch eine Kavität des Substrats hinausgeführt wird.In this exemplary embodiment, it should be noted that in all of the above exemplary embodiments or in the explanation thereof, it is essentially assumed that the sound is emitted from the substrate. Of course, according to exemplary embodiments, it is also conceivable that the sound is led out through the substrate or through a cavity of the substrate.
An dieser Stelle sein angemerkt, dass
Nachfolgend werden Bezug nehmend auf die
Es soll erwähnt werden, dass bei Ausführungsbeispielen die Aktuatorgeometrie beliebig miteinander kombiniert werden können (z. B.
Bei der Variante von
Durch die Kombination unterschiedlicher Aktuatoren lassen sich z. B. Mehrwegsysteme realisieren, wie anhand der
Bei obigen Ausführungsbeispielen wurde insbesondere davon ausgegangen, dass ein Schallwandler zur Emission von Schall (Lautsprecher) geschaffen werden soll, weshalb auch immer von einem Biegeaktuator gesprochen wurde. Selbstverständlich ist das Prinzip auch umkehrbar, sodass durch den Schallwandler entsprechend einem Ausführungsbeispiel ein Mikrophon gebildet wird, bei dem der Biegewandler (vgl. Biegeaktuator) ausgebildet ist, z.B. durch Luft, zur (z.B. vertikalen) Schwingung angeregt zu werden, um in Abhängigkeit hierzu ein elektrisches Signal auszugeben (allgemein die akustischen Wellen aus der Umgebung zu detektieren). Entsprechend einem weiteren Ausführungsbeispiel wird ein Bauelement geschaffen, das sowohl Lautsprecher und Mikrophon auf Basis oben erläuterten Konzepte umfasst. Hier können die beiden Bauelemente auf dem selben Substrat geformt sein, was aus Fertigungssicht vorteilhaft ist.In the above exemplary embodiments, it was assumed in particular that a sound transducer for emitting sound (loudspeaker) should be created, which is why a bending actuator was always mentioned. Of course, the principle is also reversible, so that a microphone is formed by the sound transducer according to an exemplary embodiment, in which the bending transducer (cf. bending actuator) is designed to be excited, for example by air, to oscillate (for example vertically) in order to produce a oscillation depending on this to emit an electrical signal (generally to detect the acoustic waves from the environment). According to a further exemplary embodiment, a component is created that includes both loudspeaker and microphone based on the concepts explained above. Here the two components can be formed on the same substrate, which is advantageous from a manufacturing perspective.
Im Folgenden werden zusätzliche Ausführungsbeispiele und Aspekte der Erfindung beschrieben, die einzeln oder in Kombination mit beliebigen der hierin beschriebenen Merkmale, Funktionalitäten und Einzelheiten verwendet werden können.Additional embodiments and aspects of the invention are described below, which may be used alone or in combination with any of the features, functionality and details described herein.
Gemäß einem ersten Aspekt kann ein mikromechanischer Schallwandler 1, 1', 1", der in einem Substrat aufgebaut ist, folgende Merkmale aufweisen: einen ersten Biegewandler 10, der sich entlang einer Ebene des Substrats erstreckt und ein freies Ende 10f oder eine freie Seite aufweist und ausgebildet ist, zur vertikalen Schwingung angeregt zu werden, um einen Schall zu emittieren oder aufzunehmen; und ein sich vertikal zu dem ersten Biegewandler 10 erstreckendes Blendenelement 22, das durch einen Spalt 14 von dem freien Ende 10f oder der freien Seite des ersten Biegewandlers 10 getrennt ist.According to a first aspect, a
Gemäß einem zweiten Aspekt unter Bezugnahme auf den ersten Aspekt kann das Blendenelement 22 aus der Ebene des Substrats herausragen.According to a second aspect with reference to the first aspect, the
Gemäß einem dritten Aspekt unter Bezugnahme auf den zweiten Aspekt kann das Blendenelement 22 aus einem unbeweglichen Bereich des Substrats herausragen.According to a third aspect with reference to the second aspect, the
Gemäß einem vierten Aspekt unter Bezugnahme auf einen des ersten bis dritten Aspekts kann der erste Biegewandler 10 aus der Ebene des Substrats heraus zum Schwingen anregbar sein oder senkrecht zu der Ebene des Substrats zum Schwingen anregbar sein.According to a fourth aspect, with reference to any one of the first to third aspects, the
Gemäß einem fünften Aspekt unter Bezugnahme auf einen des ersten bis vierten Aspekts kann die Höhe des Blendenelements 22 mindestens 50% oder mindestens 100% der maximalen Auslenkung des ersten Biegewandlers 10 im linearen Betrieb oder der maximalen elastischen Auslenkung des ersten Biegewandlers 10 betragen oder mindestens 3-mal eine Breite des Spalts 14 oder mindestens 1-mal eine Dicke des Biegewandlers 10 oder mindestens 0,1% oder 1% der Länge Biegewandlers 10.According to a fifth aspect with reference to one of the first to fourth aspects, the height of the
Gemäß einem sechsten Aspekt unter Bezugnahme auf einen des ersten bis fünften Aspekts kann der mikromechanische Schallwandler 1, 1', 1" ein vertikal zu dem ersten Biegewandler 10 erstreckendes Blendenelement 22 umfassen, das durch einen Spalt 14 von den beweglichen Seiten des ersten Biegewandlers 10 getrennt ist.According to a sixth aspect with reference to one of the first to fifth aspects, the
Gemäß einem siebten Aspekt unter Bezugnahme auf einen des ersten bis sechsten Aspekts kann das Blendenelement 22 in seinem Querschnitt eine variierende Geometrie aufweisen.According to a seventh aspect with reference to any one of the first to sixth aspects, the
Gemäß einem achten Aspekt unter Bezugnahme auf den siebten Aspekt kann die Geometrie derart variieren, dass eine dem Biegewandler 10 zugewandte Fläche entlang einer Bewegungsbahn des freien Endes bei einer vertikalen Schwingung des Biegewandlers 10 gekrümmt oder geneigt ist.According to an eighth aspect with reference to the seventh aspect, the geometry may vary such that a surface facing the bending
Gemäß einem neunten Aspekt unter Bezugnahme auf den siebten oder achten Aspekt kann das Blendenelement 22 einen mechanischen Anschlag für den Biegewandler 10 aufweisen.According to a ninth aspect with reference to the seventh or eighth aspect, the
Gemäß einem zehnten Aspekt unter Bezugnahme auf einen des ersten bis neunten Aspekts kann sich das Blendenelement 22 asymmetrisch aus der Ebene des Substrats heraus und in die Ebene des Substrats herein erstrecken.According to a tenth aspect, referring to any one of the first to ninth aspects, the
Gemäß einem elften Aspekt unter Bezugnahme auf einen des ersten bis neunten Aspekts kann sich das Blendenelement 22 symmetrisch aus der Ebene des Substrats heraus und in die Ebene des Substrats hereinerstrecken; und/oder wobei das Blendenelement 22 eine ausgehend von der Ruhelage des Biegewandlers 10 gleiche Höhenausdehnung aus der Ebene des Substrats heraus und in die Ebene des Substrats herein aufweisen kann.According to an eleventh aspect, referring to any one of the first to ninth aspects, the
Gemäß einem zwölften Aspekt unter Bezugnahme auf einen des ersten bis elften Aspekts kann das Substrat eine Blendenstruktur oder einen Teil der Blendenstruktur innerhalb des Substrats formen.According to a twelfth aspect, referring to any one of the first to eleventh aspects, the substrate may form a shutter structure or a part of the shutter structure within the substrate.
Gemäß einem dreizehnten Aspekt unter Bezugnahme auf einen des ersten bis zwölften Aspekts kann der mikromechanische Schallwandler 1, 1', 1" einen Deckel aufweisen, der im Bereich des ersten Biegewandlers 10 auf das Substrat aufgesetzt ist, so dass zumindest der erste Biegewandler 10 sowie das Blendenelement 22 durch den Deckel oder das erste Substrat 233s bedeckt sind.According to a thirteenth aspect with reference to one of the first to twelfth aspects, the
Gemäß einem vierzehnten Aspekt unter Bezugnahme auf den dreizehnten Aspekt kann der Deckel 220a, 220b, 220c das Blendenelement 22 ausbilden.According to a fourteenth aspect, referring to the thirteenth aspect, the
Gemäß einem fünfzehnten Aspekt unter Bezugnahme auf den dreizehnten oder vierzehnten Aspekt kann der mikromechanische Schallwandler 1, 1', 1" in dem Deckel eine oder mehrere Öffnungen aufweisen; und/oder kann der mikromechanische Schallwandler 1, 1', 1" in dem Substrat eine oder mehrere Schallöffnungen aufweisen.According to a fifteenth aspect, with reference to the thirteenth or fourteenth aspect, the
Gemäß einem sechszehnten Aspekt unter Bezugnahme auf einen des ersten bis fünfzehnten Aspekts kann der mikromechanische Schallwandler 1, 1', 1" einen zweiten Biegewandler 12 mit einem freien Ende umfassen, welcher mit dem ersten Biegewandler 10 in einer gemeinsamen Ebene e1 angeordnet ist, und das Blendenelement 22 zwischen dem freien Ende des ersten Biegewandlers 10 und dem freien Ende des zweiten Biegewandlers angeordnet sein.According to a sixteenth aspect, with reference to any one of the first to fifteenth aspects, the
Gemäß einem siebzehnten Aspekt unter Bezugnahme auf einen des ersten bis sechszehnten Aspekts kann der mikromechanische Schallwandler 1, 1', 1" einen zweiten Biegewandler 12 umfassen, welcher ein freies Ende 12f aufweist und mit dem ersten Biegewandler 10 in einer gemeinsamen Ebene e1 angeordnet ist, so dass das freie Ende 10f des ersten Biegewandlers 10 von dem freien Ende 10f des zweiten Biegewandlers 12 durch einen Spalt 14 getrennt ist, wobei der zweite Biegewandler 12 phasengleich zu der vertikalen Schwingung des ersten Biegewandlers 10 angeregt wird.According to a seventeenth aspect, with reference to any one of the first to sixteenth aspects, the
Gemäß einem achtzehnten Aspekt unter Bezugnahme auf den siebzehnten Aspekt können der erste und zweite Biegewandler 10, 12 gleichartige Biegewandler sein.According to an eighteenth aspect with reference to the seventeenth aspect, the first and
Gemäß einem neunzehnten Aspekt unter Bezugnahme auf einen des ersten bis sechszehnten Aspekts können der erste und/oder zweite Biegewandler 12 ein flächiger, trapezförmiger oder rechteckiger Biegewandler sein.According to a nineteenth aspect, with reference to any one of the first to sixteenth aspects, the first and/or
Gemäß einem zwanzigsten Aspekt unter Bezugnahme auf einen des ersten bis neunzehnten Aspekts können der erste und/oder zweite Biegewandler 10, 12 ein dreieckiger oder kreissegmentförmiger oder abgerundeter Biegewandler sein.According to a twentieth aspect, with reference to any one of the first to nineteenth aspects, the first and/or
Gemäß einem einundzwanzigsten Aspekt unter Bezugnahme auf einen des siebzehnten bis neunzehnten Aspekts kann der mikromechanische Schallwandler 1, 1', 1" einen oder mehrere weitere Biegewandler umfassen, die in der gemeinsamen Fläche angeordnet sind, so dass deren freie Enden von den freien Enden 10f, 12f des ersten und/oder zweiten Biegewandlers 10, 12 durch einen Spalt 14 getrennt sind, wobei der zumindest eine weitere Biegewandler phasengleich zu der vertikalen Schwingung des ersten und/oder zweiten Biegewandlers 10, 12 zur vertikalen Schwingung angeregt wird.According to a twenty-first aspect, with reference to any one of the seventeenth to nineteenth aspects, the
Gemäß einem zweiundzwanzigsten Aspekt unter Bezugnahme auf einen des siebzehnten bis einundzwanzigsten Aspekts kann der mikromechanische Schallwandler 1, 1', 1" eine Steuerung umfassen, die den ersten und zweiten Biegewandler 12 so ansteuert, dass diese phasengleich zur vertikalen Schwingung angeregt werden.According to a twenty-second aspect with reference to one of the seventeenth to twenty-first aspects, the
Gemäß einem dreiundzwanzigsten Aspekt unter Bezugnahme auf einen des ersten bis zweiundzwanzigsten Aspekts kann der mikromechanische Schallwandler 1, 1', 1" eine Sensorik umfassen, die ausgebildet ist, um die vertikale Schwingung und/oder die Position des ersten und/oder des zweiten Biegewandlers 12 zu erfassen.According to a twenty-third aspect with reference to one of the first to twenty-second aspects, the
Gemäß einem vierundzwanzigsten Aspekt unter Bezugnahme auf einen des ersten bis dreiundzwanzigsten Aspekts kann der Spalt 14 kleiner 10% oder kleiner 5% oder kleiner 1% oder kleiner 0,1% oder kleiner 0,01% der Fläche des ersten Biegewandlers 10 sein.According to a twenty-fourth aspect, with reference to any one of the first to twenty-third aspects, the
Gemäß einem fünfundzwanzigsten Aspekt unter Bezugnahme auf einen des ersten bis vierundzwanzigsten Aspekts kann der Spalt 14 bei Auslenkung kleiner 15% oder kleiner 10%, 5%, 1%, 0,1% oder 0,01% der Fläche des ersten Biegewandlers 10 sein.According to a twenty-fifth aspect, with reference to one of the first to twenty-fourth aspects, the
Gemäß einem sechsundzwanzigsten Aspekt unter Bezugnahme auf einen des ersten bis fünfundzwanzigsten Aspekts kann der Spalt 14 im Ruhezustand des ersten Biegewandlers 10 bestehen.According to a twenty-sixth aspect, with reference to any one of the first to twenty-fifth aspects, the
Gemäß einem siebenundzwanzigsten Aspekt unter Bezugnahme auf einen des ersten bis sechsundzwanzigsten Aspekts kann der erste Biegewandler 10 einseitig oder mehrseitig gegenüber dem Substrat und/oder einem Grundelement eingespannt sein.According to a twenty-seventh aspect with reference to any one of the first to twenty-sixth aspects, the
Gemäß einem achtundzwanzigsten Aspekt unter Bezugnahme auf einen des ersten bis siebenundzwanzigsten Aspekts kann der erste Biegewandler 10 oder ein zweiter Biegewandler 12 jeweils ein erstes und ein zweites Biegeelement umfassen, die in Serie geschaltet sind, um so den jeweiligen Biegewandler zu formen.According to a twenty-eighth aspect, with reference to any one of the first to twenty-seventh aspects, the
Gemäß einem neunundzwanzigsten Aspekt unter Bezugnahme auf den achtundzwanzigsten Aspekt kann das erste Biegeelement ein eingespanntes Ende und ein freies Ende 10f aufweisen und das zweite Biegeelement mit seinem eingespannten Ende an das freie Ende 10f des ersten Biegeelements 10 angreifen und mit seinem freien Ende 10f das freie Ende 10f, 12f des ersten und/oder zweiten Biegewandlers 12 formen.According to a twenty-ninth aspect with reference to the twenty-eighth aspect, the first bending element may have a clamped end and a
Gemäß einem dreißigsten Aspekt unter Bezugnahme auf den achtundzwanzigsten oder neunundzwanzigsten Aspekt kann das erste Biegeelement über ein flexibles Element mit dem zweiten Biegeelement verbunden sein.According to a thirtieth aspect with reference to the twenty-eighth or twenty-ninth aspect, the first bending element may be connected to the second bending element via a flexible element.
Gemäß einem einunddreißigsten Aspekt unter Bezugnahme auf einen des achtundzwanzigsten bis dreißigsten Aspekts kann der mikromechanische Schallwandler einen Rahmen aufweisen.According to a thirty-first aspect with reference to any one of the twenty-eighth to thirtieth aspects, the micromechanical sound transducer may include a frame.
Gemäß einem zweiunddreißigsten Aspekt unter Bezugnahme auf den einunddreißigsten Aspekt kann der Rahmen im Bereich des Übergangs zwischen dem ersten und dem zweiten Biegeelement angeordnet sein.According to a thirty-second aspect with reference to the thirty-first aspect, the frame may be disposed in the region of the transition between the first and second flexure elements.
Gemäß einem dreiunddreißigsten Aspekt unter Bezugnahme auf einen des achtundzwanzigsten bis zweiunddreißigsten Aspekts können das erste Biegeelement und das zweite Biegeelement mit unterschiedlichen Steuersignalen angesteuert werden.According to a thirty-third aspect with reference to any one of the twenty-eighth to thirty-second aspects, the first bending element and the second bending element may be driven with different control signals.
Gemäß einem vierunddreißigsten Aspekt kann ein Verfahren zur Herstellung eines mikromechanischen Schallwandlers, der in einem Substrat aufgebaut ist, mit einem sich entlang einer Ebene des Substrats erstreckenden, ersten Biegewandler 10, und einem vertikal zu dem ersten Biegewandler 10 erstreckenden Blendenelement 22, folgende Schritte aufweisen: Strukturieren einer Schicht, um den ersten Biegewandler 10 zu formen, so dass er ein freies Ende 10f oder eine freie Seite aufweist und ausgebildet ist, zur vertikalen Schwingung angeregt zu werden, um einen Schall zu emittieren oder aufzunehmen; und Realisierung des vertikalen Blendenelements 22, so dass dieses über die Schicht des ersten Biegewandlers 10 hinausragt und durch einen Spalt 14 von dem freien Ende 10f des ersten Biegewandlers 10 getrennt ist.According to a thirty-fourth aspect, a method for producing a micromechanical sound transducer constructed in a substrate, having a
Gemäß einem fünfunddreißigsten Aspekt kann ein mikromechanischer Schallwandler 1, 1', 1" einen ersten Biegewandler 10, der ein freies Ende 10f oder eine freie Seite hat und ausgebildet ist, zur vertikalen Schwingung angeregt zu werden, um einen Schall zu emittieren oder aufzunehmen, aufweisen; wobei der erste Biegewandler 10, 12 ein erstes und ein zweites Biegeelement umfassen kann, die in Serie geschaltet sind, um so den ersten Biegewandler zu formen, wobei das erste Biegeelement mit jeweils einem ersten Steuersignal und das zweite Biegeelement mit einem zweiten Steuersignal ansteuerbar sind.According to a thirty-fifth aspect, a
Gemäß einem sechsunddreißigsten Aspekt unter Bezugnahme auf den fünfunddreißigsten Aspekt kann sich das erste Steuersignal von dem zweiten Steuersignal unterscheiden.According to a thirty-sixth aspect, referring to the thirty-fifth aspect, the first control signal may be different from the second control signal.
Gemäß einem siebenunddreißigsten Aspekt unter Bezugnahme auf den sechsunddreißigsten Aspekt können das erste Steuersignal und das zweite Steuersignal von einem gemeinsamen Ursprungssignal abgeleitet sein und das erste Steuersignal gegenüber dem zweiten Steuersignal modifiziert sein.According to a thirty-seventh aspect, with reference to the thirty-sixth aspect, the first control signal and the second control signal may be derived from a common source signal and the first control signal may be modified from the second control signal.
Gemäß einem achtunddreißigsten Aspekt unter Bezugnahme auf den sechsunddreißigsten oder siebenunddreißigsten Aspekt kann das erste Steuersignal einen von dem zweiten Steuersignal unterschiedlichen oder teilweise überlappenden Frequenzbereich aufweisen oder können das erste Steuersignal und das zweite Steuersignal von einem gemeinsamen Ursprungssignal abgeleitet sein und das erste Steuersignal eine andere Frequenzfilterung erfahren haben als das zweite Steuersignal.According to a thirty-eighth aspect, with reference to the thirty-sixth or thirty-seventh aspect, the first control signal may have a different or partially overlapping frequency range from the second control signal, or the first control signal and the second control signal may be derived from a common source signal and the first control signal may undergo different frequency filtering have as the second control signal.
Gemäß einem neununddreißigsten Aspekt unter Bezugnahme auf den achtunddreißigsten Aspekt kann das erste Steuersignal einen niedrigeren Frequenzbereich haben als das zweite Steuersignal.According to a thirty-ninth aspect with reference to the thirty-eighth aspect, the first control signal may have a lower frequency range than the second control signal.
Gemäß einem vierzigsten Aspekt unter Bezugnahme auf einen des fünfunddreißigsten bis neununddreißigsten Aspekts kann der mikromechanische Schallwandler 1, 1', 1" einen zweiten Biegewandler 12, der ein freies Ende 12f hat und mit dem ersten Biegewandler 10 in einer gemeinsamen Ebene e1 angeordnet ist, umfassen, wobei der zweite Biegewandler 10, 12 ein erstes und ein zweites Biegeelement 10, 12 umfassen kann, die in Serie geschaltet sind, um so den zweiten Biegewandler zu formen.According to a fortieth aspect, with reference to any one of the thirty-fifth to thirty-ninth aspects, the
Gemäß einem einundvierzigsten Aspekt unter Bezugnahme auf einen des fünfunddreißigsten bis vierzigsten Aspekts kann das erste Biegeelement ein eingespanntes Ende und ein freies Ende aufweisen und das zweite Biegeelement mit seinem eingespannten Ende an das freie Ende des ersten Biegeelements 10 angreifen und mit seinem freien Ende das freie Ende 10f, 12f des ersten und/oder zweiten Biegewandlers 10, 12 formen.According to a forty-first aspect with reference to one of the thirty-fifth to fortieth aspects, the first bending element may have a clamped end and a free end and the second bending element may engage the free end of the
Gemäß einem zweiundvierzigsten Aspekt unter Bezugnahme auf einen des fünfunddreißigsten bis einundvierzigsten Aspekts kann das erste Biegeelement über ein flexibles Element mit dem zweiten Biegeelement verbunden sein.According to a forty-second aspect with reference to any one of the thirty-fifth to forty-first aspects, the first bending member may be connected to the second bending member via a flexible member.
Gemäß einem dreiundvierzigsten Aspekt unter Bezugnahme auf einen des fünfunddreißigsten bis zweiundvierzigsten Aspekts kann der mikromechanische Schallwandler einen Rahmen aufweisen.According to a forty-third aspect, referring to any one of the thirty-fifth to forty-second aspects, the micromechanical sound transducer may include a frame.
Gemäß einem vierundvierzigsten Aspekt unter Bezugnahme auf den dreiundvierzigsten Aspekt kann der Rahmen im Bereich des Übergangs zwischen dem ersten und dem zweiten Biegeelement angeordnet sein.According to a forty-fourth aspect with reference to the forty-third aspect, the frame may be disposed in the region of the transition between the first and second flexure elements.
Gemäß einem fünfundvierzigsten Aspekt unter Bezugnahme auf einen des fünfunddreißigsten bis vierundvierzigsten Aspekts können das erste Biegeelement und das zweite Biegeelement mit unterschiedlichen Steuersignalen angesteuert werden.According to a forty-fifth aspect with reference to any one of the thirty-fifth to forty-fourth aspects, the first bending element and the second bending element may be driven with different control signals.
Gemäß einem sechsundvierzigsten Aspekt unter Bezugnahme auf einen des fünfunddreißigsten bis fünfundvierzigsten Aspekts können der erste und/oder zweite Biegewandler 10, 12 ein flächiger, trapezförmiger oder rechteckiger Biegewandler sein.According to a forty-sixth aspect with reference to any one of the thirty-fifth to forty-fifth aspects, the first and/or
Gemäß einem siebenundvierzigsten Aspekt unter Bezugnahme auf einen des fünfunddreißigsten bis sechsundvierzigsten Aspekts können der erste und/oder zweite Biegewandler 12 ein dreieckiger oder kreissegmentförmiger Biegewandler sein.According to a forty-seventh aspect, with reference to any one of the thirty-fifth to forty-sixth aspects, the first and/or
Gemäß einem achtundvierzigsten Aspekt unter Bezugnahme auf einen des fünfunddreißigsten bis siebenundvierzigsten Aspekts kann der mikromechanische Schallwandler 1, 1', 1" einen oder mehrere weitere Biegewandler umfassen, die in der gemeinsamen Fläche angeordnet sind, so dass deren freie Enden von den freien Enden 10f, 12f des ersten und/oder zweiten Biegewandlers 12 durch einen Spalt 14 getrennt sind, wobei der zumindest eine weitere Biegewandler 12 phasengleich zu der vertikalen Schwingung des ersten und/oder zweiten Biegewandlers 10, 12 zur vertikalen Schwingung angeregt werden kann.According to a forty-eighth aspect, with reference to any one of the thirty-fifth to forty-seventh aspects, the
Gemäß einem neunundvierzigsten Aspekt unter Bezugnahme auf einen des fünfunddreißigsten bis achtundvierzigsten Aspekts kann der Spalt 14 kleiner 10% oder kleiner 5% oder 1% oder 0,1%, oder kleiner 0,01% der Fläche des ersten Biegewandlers 10 sein.According to a forty-ninth aspect, with reference to any one of the thirty-fifth to forty-eighth aspects, the
Gemäß einem fünfzigsten Aspekt unter Bezugnahme auf einen des fünfunddreißigsten bis neunundvierzigsten Aspekts kann der Spalt 14 bei Auslenkung kleiner 15% oder kleiner 10%, 5%, 1% oder 0,1%, oder kleiner 0,01% der Fläche des ersten Biegewandlers 10 sein.According to a fiftieth aspect with reference to one of the thirty-fifth to forty-ninth aspects, the
Gemäß einem einundfünfzigsten Aspekt kann ein Verfahren zur Herstellung eines mikromechanischen Schallwandlers nach einem des fünfunddreißigsten bis fünfzigsten Aspekts, der einen ersten Biegewandler 10 umfasst, folgende Schritte aufweisen: Bereitstellen einer ersten Schicht in einer gemeinsamen Ebene e1, die zumindest den ersten Biegewandler 10 mit jeweils einem ersten und einem zweiten Biegeelement formt, sodass der erste Biegewandler 10 ein freies Ende 10f aufweist; und Verbinden des jeweils ersten Biegeelements mit dem zweiten Biegeelement des jeweiligen ersten Biegewandlers.According to a fifty-first aspect, a method for producing a micromechanical sound transducer according to one of the thirty-fifth to fiftieth aspects, which includes a
Gemäß einem zweiundfünfzigsten Aspekt unter Bezugnahme auf einen des ersten bis dreiunddreißigsten oder fünfunddreißigsten bis neunundvierzigsten Aspekts können zwei Biegewandler 10 mit ihrem eingespannten Ende gegenüber einem Substrat 23s gelagert sein, wobei die Geometrie des ersten der zwei Biegewandler durch die Geometrie des zweiten der zwei Biegewandler 10 eingeschlossen oder umschlossen ist.According to a fifty-second aspect, with reference to any one of the first to thirty-third or thirty-fifth to forty-ninth aspects, two bending
Gemäß einem dreiundfünfzigsten Aspekt unter Bezugnahme auf den zweiundfünfzigsten Aspekt kann der zweite der zwei Biegewandler 10 eine Aussparung für den ersten der zwei Biegewandler 10 aufweisen.According to a fifty-third aspect with reference to the fifty-second aspect, the second of the two bending
Gemäß einem vierundfünfzigsten Aspekt unter Bezugnahme auf den zweiundfünfzigsten oder dreiundfünfzigsten Aspekt können die zwei Biegewandler durch einen Schlitz oder einen Schlitz mit Blende separiert sein.According to a fifty-fourth aspect with reference to the fifty-second or fifty-third aspect, the two bending transducers may be separated by a slot or a slot with an aperture.
Gemäß einem fünfundfünfzigsten Aspekt unter Bezugnahme auf den zweiundfünfzigsten, dreiundfünfzigsten oder vierundfünfzigsten Aspekt können die zwei Biegewandler mit zwei unterschiedlichen Steuersignalen oder mit zwei Steuersignalen für zwei unterschiedliche Frequenzbereiche ansteuerbar sein.According to a fifty-fifth aspect with reference to the fifty-second, fifty-third or fifty-fourth aspect, the two bending transducers may be controllable with two different control signals or with two control signals for two different frequency ranges.
Claims (15)
wobei der mikromechanische Schallwandler einen Rahmen aufweist und wobei der Rahmen im Bereich des Übergangs zwischen dem ersten und dem zweiten Biegeelement angeordnet ist.Micromechanical sound transducer (1, 1', 1") according to one of claims 1 to 6, wherein the micromechanical sound transducer has a frame; or
wherein the micromechanical sound transducer has a frame and wherein the frame is arranged in the area of the transition between the first and the second bending element.
wobei der erste Biegewandler (12) ein dreieckiger oder kreissegmentförmiger Biegewandler ist.Micromechanical sound transducer (1, 1', 1") according to one of claims 1 to 8, wherein the first bending transducer (10, 12) is a flat, trapezoidal or rectangular bending transducer; or
wherein the first bending transducer (12) is a triangular or circular segment-shaped bending transducer.
wobei der Spalt (14) bei Auslenkung kleiner 15% oder kleiner 10%, 5%, 1% oder 0,1%, oder kleiner 0,01% der Fläche des ersten Biegewandlers (10) ist.Micromechanical sound transducer (1, 1', 1") according to claim 10, wherein the gap (14) is less than 10% or less than 5% or 1% or 0.1% or less than 0.01% of the area of the first bending transducer (10 ) is; and/or
wherein the gap (14) is less than 15% or less than 10%, 5%, 1% or 0.1%, or less than 0.01% of the area of the first bending transducer (10) when the deflection occurs.
wobei die zwei Biegewandler durch einen Schlitz oder einen Schlitz mit Blende separiert sind.Micromechanical sound transducer (1, 1', 1") according to claim 13, wherein the second of the two bending transducers (10) has a recess for the first of the two bending transducers (10); and/or
wherein the two bending transducers are separated by a slot or a slot with a cover.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102017208911.3A DE102017208911A1 (en) | 2017-05-26 | 2017-05-26 | Micromechanical transducer |
| EP18729366.7A EP3632135B1 (en) | 2017-05-26 | 2018-05-28 | Micromechanical acoustic transducer |
| PCT/EP2018/063961 WO2018215669A2 (en) | 2017-05-26 | 2018-05-28 | Micromechanical acoustic transducer |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP18729366.7A Division EP3632135B1 (en) | 2017-05-26 | 2018-05-28 | Micromechanical acoustic transducer |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP4247006A2 true EP4247006A2 (en) | 2023-09-20 |
| EP4247006A3 EP4247006A3 (en) | 2023-12-27 |
Family
ID=62530200
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP18729366.7A Active EP3632135B1 (en) | 2017-05-26 | 2018-05-28 | Micromechanical acoustic transducer |
| EP23189034.4A Pending EP4247006A3 (en) | 2017-05-26 | 2018-05-28 | Micromechanical acoustic transducer |
| EP23189032.8A Pending EP4247005A3 (en) | 2017-05-26 | 2018-05-28 | Micromechanical acoustic transducer |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP18729366.7A Active EP3632135B1 (en) | 2017-05-26 | 2018-05-28 | Micromechanical acoustic transducer |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP23189032.8A Pending EP4247005A3 (en) | 2017-05-26 | 2018-05-28 | Micromechanical acoustic transducer |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US11350217B2 (en) |
| EP (3) | EP3632135B1 (en) |
| JP (2) | JP7303121B2 (en) |
| CN (2) | CN116668926A (en) |
| DE (1) | DE102017208911A1 (en) |
| WO (1) | WO2018215669A2 (en) |
Families Citing this family (48)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102019201744B4 (en) | 2018-12-04 | 2020-06-18 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | MEMS SOUND CONVERTER |
| EP3675522A1 (en) * | 2018-12-28 | 2020-07-01 | Sonion Nederland B.V. | Miniature speaker with essentially no acoustical leakage |
| JP2020136800A (en) * | 2019-02-15 | 2020-08-31 | 新日本無線株式会社 | Piezoelectric element |
| DE102019116080A1 (en) * | 2019-06-13 | 2020-12-17 | USound GmbH | MEMS sound transducer with a membrane made of polymer |
| JP7522541B2 (en) * | 2019-07-12 | 2024-07-25 | 日清紡マイクロデバイス株式会社 | Piezoelectric element |
| US11042346B2 (en) * | 2019-07-30 | 2021-06-22 | International Business Machines Corporation | Artificial cochlea |
| DE102019218769A1 (en) * | 2019-12-03 | 2020-11-19 | Robert Bosch Gmbh | Micromechanical component for an actuator and / or sensor device |
| JP7433870B2 (en) | 2019-12-04 | 2024-02-20 | エルジー ディスプレイ カンパニー リミテッド | Display device and information processing device |
| US11202138B2 (en) * | 2020-03-05 | 2021-12-14 | Facebook Technologies, Llc | Miniature high performance MEMS piezoelectric transducer for in-ear applications |
| CN111328005B (en) * | 2020-03-10 | 2021-09-10 | 瑞声声学科技(深圳)有限公司 | Piezoelectric MEMS microphone |
| WO2021220566A1 (en) * | 2020-04-30 | 2021-11-04 | 株式会社村田製作所 | Piezoelectric device |
| US11399228B2 (en) * | 2020-07-11 | 2022-07-26 | xMEMS Labs, Inc. | Acoustic transducer, wearable sound device and manufacturing method of acoustic transducer |
| US11884535B2 (en) * | 2020-07-11 | 2024-01-30 | xMEMS Labs, Inc. | Device, package structure and manufacturing method of device |
| US11972749B2 (en) * | 2020-07-11 | 2024-04-30 | xMEMS Labs, Inc. | Wearable sound device |
| US12088988B2 (en) * | 2020-07-11 | 2024-09-10 | xMEMS Labs, Inc. | Venting device and venting method thereof |
| US11323797B2 (en) * | 2020-07-11 | 2022-05-03 | xMEMS Labs, Inc. | Acoustic transducer, wearable sound device and manufacturing method of acoustic transducer |
| US12028673B2 (en) | 2020-07-11 | 2024-07-02 | xMEMS Labs, Inc. | Driving circuit and wearable sound device thereof |
| US12022253B2 (en) * | 2020-07-11 | 2024-06-25 | xMEMS Labs, Inc. | Venting device |
| CN213342677U (en) * | 2020-09-27 | 2021-06-01 | 瑞声科技(南京)有限公司 | Piezoelectric microphone |
| IT202000024469A1 (en) * | 2020-10-16 | 2022-04-16 | St Microelectronics Srl | MICROMACHINING PIEZOELECTRIC ULTRASONIC TRANSDUCER |
| US20240128928A1 (en) * | 2021-01-14 | 2024-04-18 | xMEMS Labs, Inc. | Demodulation Signal Generator for Air Pulse Generator |
| US12075213B2 (en) * | 2021-01-14 | 2024-08-27 | xMEMS Labs, Inc. | Air-pulse generating device |
| US20230292058A1 (en) * | 2021-01-14 | 2023-09-14 | xMEMS Labs, Inc. | Air-Pulse Generating Device Producing Asymmetric Air Pulses |
| US20230300539A1 (en) * | 2021-01-14 | 2023-09-21 | xMEMS Labs, Inc. | Air-Pulse Generating Device with Efficient Propagation |
| US11943585B2 (en) * | 2021-01-14 | 2024-03-26 | xMEMS Labs, Inc. | Air-pulse generating device with common mode and differential mode movement |
| DE102021201784A1 (en) | 2021-02-25 | 2022-08-25 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung eingetragener Verein | MEMS transducer array |
| JP7452476B2 (en) | 2021-03-10 | 2024-03-19 | 株式会社デンソー | Piezoelectric element, piezoelectric device, and method for manufacturing piezoelectric element |
| DE102021202573B3 (en) | 2021-03-16 | 2022-07-07 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung eingetragener Verein | MEMS TRANSDUCER WITH CUTS AND PROJECTIONS |
| DE102021203360A1 (en) | 2021-04-01 | 2022-10-06 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung eingetragener Verein | MEMS SOUND TRANSDUCER |
| US20240022859A1 (en) * | 2021-05-11 | 2024-01-18 | xMEMS Labs, Inc. | Package structure, apparatus and forming methods thereof |
| US11711653B2 (en) | 2021-05-11 | 2023-07-25 | xMEMS Labs, Inc. | Sound producing cell and manufacturing method thereof |
| US20220408195A1 (en) * | 2021-06-17 | 2022-12-22 | Skyworks Solutions, Inc. | Acoustic devices with residual stress compensation |
| CN113365196B (en) * | 2021-07-05 | 2023-06-02 | 瑞声开泰科技(武汉)有限公司 | MEMS speaker and MEMS speaker manufacturing method |
| CN113852897A (en) * | 2021-08-02 | 2021-12-28 | 天津大学 | Piezoelectric MEMS (micro-electromechanical systems) loudspeaker, design method thereof and electronic equipment |
| WO2023010247A1 (en) * | 2021-08-02 | 2023-02-09 | 天津大学 | Piezoelectric mems speaker, design method therefor, and electronic device |
| DE102021130035A1 (en) * | 2021-11-17 | 2023-05-17 | USound GmbH | MEMS transducer with a curved contour of a cantilever element |
| CN114339552A (en) * | 2021-12-31 | 2022-04-12 | 瑞声开泰科技(武汉)有限公司 | Sound production device |
| CN114513729B (en) * | 2022-01-07 | 2023-07-07 | 华为技术有限公司 | Electronic device and acoustic transducer |
| US20230270010A1 (en) * | 2022-02-18 | 2023-08-24 | Apple Inc. | Piezoelectric mems valve for an electronic device |
| DE102022203173A1 (en) | 2022-03-31 | 2023-10-05 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung eingetragener Verein | MEMS sound transducer |
| IT202200007043A1 (en) * | 2022-04-08 | 2023-10-08 | St Microelectronics Srl | DIAPHRAGM MICRO-ELECTROMECHANICAL ELECTRO-ACOUSTIC TRANSDUCER |
| EP4376442A3 (en) * | 2022-04-08 | 2024-08-14 | STMicroelectronics S.r.l. | Membrane microelectromechanical electroacustic transducer |
| EP4283609A1 (en) * | 2022-05-28 | 2023-11-29 | xMEMS Labs, Inc. | Air-pulse generating device |
| DE102022210125A1 (en) | 2022-09-26 | 2024-03-28 | Robert Bosch Gesellschaft mit beschränkter Haftung | Micromechanical sound transducer device and corresponding sound conversion method |
| US12063470B1 (en) | 2023-02-10 | 2024-08-13 | xMEMS Labs, Inc. | Acoustic package structure and covering structure |
| DE102023203237A1 (en) | 2023-04-06 | 2024-10-10 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung eingetragener Verein | MEMS SOUND TRANSDUCERS |
| DE102023203467A1 (en) | 2023-04-17 | 2024-10-17 | Robert Bosch Gesellschaft mit beschränkter Haftung | Microelectromechanical actuator structure, component |
| CN117729500B (en) * | 2024-02-08 | 2024-04-30 | 成都纤声科技有限公司 | Acoustic piezoelectric structure, acoustic sensor and electronic equipment |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7003125B2 (en) | 2001-09-12 | 2006-02-21 | Seung-Hwan Yi | Micromachined piezoelectric microspeaker and fabricating method thereof |
| US7089069B2 (en) | 2001-08-17 | 2006-08-08 | Carnegie Mellon University | Method and apparatus for reconstruction of soundwaves from digital signals |
| US20100316242A1 (en) | 2007-11-21 | 2010-12-16 | Audio Pixels Ltd. | Digital speaker apparatus |
| US20110051985A1 (en) | 2009-08-31 | 2011-03-03 | Samsung Electronics Co., Ltd. | Piezoelectric micro speaker having piston diaphragm and method of manufacturing the same |
| US8280079B2 (en) | 2008-09-25 | 2012-10-02 | Samsung Electronics Co., Ltd. | Piezoelectric microspeaker and method of fabricating the same |
| US20130156253A1 (en) | 2010-01-19 | 2013-06-20 | Universite Paris-Sud 11 | Electrodynamic speaker structure having mems technology |
| US20130294636A1 (en) | 2012-05-07 | 2013-11-07 | Commissariat A L'energie Atomique Et Aux Ene Alt | Digital loudspeaker with enhanced performance |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6496351B2 (en) | 1999-12-15 | 2002-12-17 | Jds Uniphase Inc. | MEMS device members having portions that contact a substrate and associated methods of operating |
| WO2004018980A2 (en) | 2002-08-20 | 2004-03-04 | The Regents Of The University Of California | Optical waveguide vibration sensor for use in hearing aid |
| JP4715236B2 (en) * | 2005-03-01 | 2011-07-06 | 株式会社デンソー | Ultrasonic sensor device |
| WO2007029878A1 (en) * | 2005-09-09 | 2007-03-15 | Yamaha Corporation | Capacitor microphone |
| JP5707323B2 (en) | 2008-06-30 | 2015-04-30 | ザ・リージェンツ・オブ・ザ・ユニバーシティ・オブ・ミシガンThe Regents Of The University Of Michigan | Piezoelectric MEMS microphone |
| EP2254353B1 (en) * | 2009-05-19 | 2017-07-05 | Sivantos Pte. Ltd. | Hearing device with a sound transducer and method for manufacturing a sound transducer |
| DE102010009453A1 (en) | 2010-02-26 | 2011-09-01 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Sound transducer for insertion in an ear |
| CN101841756A (en) | 2010-03-29 | 2010-09-22 | 瑞声声学科技(深圳)有限公司 | Diaphragm and silicon condenser microphone applying same |
| EP2669648A4 (en) * | 2011-01-28 | 2017-03-01 | The University of Tokyo | Differential pressure sensor |
| CN103460721B (en) | 2011-03-31 | 2017-05-24 | 韦斯伯技术公司 | Acoustic transducer with gap-controlling geometry and method of manufacturing an acoustic transducer |
| DE102012107457B4 (en) * | 2012-08-14 | 2017-05-24 | Tdk Corporation | MEMS device with membrane and method of manufacture |
| JP6021110B2 (en) | 2012-12-28 | 2016-11-02 | 国立大学法人 東京大学 | Pressure-sensitive sensor |
| US9092585B2 (en) | 2013-01-22 | 2015-07-28 | The Procter & Gamble Company | Computer based models for absorbent articles |
| US9212045B1 (en) | 2014-07-31 | 2015-12-15 | Infineon Technologies Ag | Micro mechanical structure and method for fabricating the same |
| DE102015210919A1 (en) | 2015-06-15 | 2016-12-15 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | A MEMS transducer for interacting with a volumetric flow of a fluid and method of making the same |
| DE102015213771A1 (en) * | 2015-07-22 | 2017-01-26 | Robert Bosch Gmbh | MEMS device with sound pressure-sensitive membrane element |
| KR101725728B1 (en) * | 2016-05-30 | 2017-04-13 | 김중배 | Differential loudspeaker with motional feedback |
-
2017
- 2017-05-26 DE DE102017208911.3A patent/DE102017208911A1/en active Pending
-
2018
- 2018-05-28 WO PCT/EP2018/063961 patent/WO2018215669A2/en active Application Filing
- 2018-05-28 EP EP18729366.7A patent/EP3632135B1/en active Active
- 2018-05-28 EP EP23189034.4A patent/EP4247006A3/en active Pending
- 2018-05-28 CN CN202310360853.5A patent/CN116668926A/en active Pending
- 2018-05-28 CN CN201880049684.0A patent/CN111034223A/en active Pending
- 2018-05-28 EP EP23189032.8A patent/EP4247005A3/en active Pending
- 2018-05-28 JP JP2019565478A patent/JP7303121B2/en active Active
-
2019
- 2019-11-22 US US16/693,016 patent/US11350217B2/en active Active
-
2022
- 2022-11-28 JP JP2022189513A patent/JP2023029908A/en active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7089069B2 (en) | 2001-08-17 | 2006-08-08 | Carnegie Mellon University | Method and apparatus for reconstruction of soundwaves from digital signals |
| US7003125B2 (en) | 2001-09-12 | 2006-02-21 | Seung-Hwan Yi | Micromachined piezoelectric microspeaker and fabricating method thereof |
| US20100316242A1 (en) | 2007-11-21 | 2010-12-16 | Audio Pixels Ltd. | Digital speaker apparatus |
| US8280079B2 (en) | 2008-09-25 | 2012-10-02 | Samsung Electronics Co., Ltd. | Piezoelectric microspeaker and method of fabricating the same |
| US20110051985A1 (en) | 2009-08-31 | 2011-03-03 | Samsung Electronics Co., Ltd. | Piezoelectric micro speaker having piston diaphragm and method of manufacturing the same |
| US20130156253A1 (en) | 2010-01-19 | 2013-06-20 | Universite Paris-Sud 11 | Electrodynamic speaker structure having mems technology |
| US20130294636A1 (en) | 2012-05-07 | 2013-11-07 | Commissariat A L'energie Atomique Et Aux Ene Alt | Digital loudspeaker with enhanced performance |
Non-Patent Citations (4)
| Title |
|---|
| DE AEGER ET AL.: "Development and Characterization of a Piezoelectrically Actuated MEMS Digital Loudspeaker", PROCEDIA ENGINEERING, vol. 47, 2012, pages 184 - 187 |
| GLACER ET AL.: "Reversible acoustical transducers in MEMS technology", PROC. DTIP, 2013 |
| HOUDOUIN: "Acoustic vs electric power response of a high-performance MEMS microspeaker", IEEE SENSORS, 2014 |
| YI ET AL.: "Performance of packaged piezoelectric microspeakers depending on the material properties", PROC. MEMS, 2009, pages 765 - 768, XP031444406 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP4247006A3 (en) | 2023-12-27 |
| DE102017208911A1 (en) | 2018-11-29 |
| US11350217B2 (en) | 2022-05-31 |
| JP2020522178A (en) | 2020-07-27 |
| CN116668926A (en) | 2023-08-29 |
| JP2023029908A (en) | 2023-03-07 |
| EP3632135B1 (en) | 2023-08-02 |
| WO2018215669A3 (en) | 2019-01-24 |
| CN111034223A (en) | 2020-04-17 |
| US20200100033A1 (en) | 2020-03-26 |
| EP4247005A3 (en) | 2023-12-06 |
| JP7303121B2 (en) | 2023-07-04 |
| WO2018215669A2 (en) | 2018-11-29 |
| EP3632135A2 (en) | 2020-04-08 |
| EP4247005A2 (en) | 2023-09-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3632135B1 (en) | Micromechanical acoustic transducer | |
| EP3100467B1 (en) | Mems having micromechanical piezoelectric actuators for realizing high forces and deflections | |
| EP3308555B1 (en) | Mems transducer for interacting with a volume flow of a fluid and method for producing same | |
| EP3612493B1 (en) | Mems converter for interaction with a volume flow rate of a fluid, and method for producing same | |
| DE102017200393B4 (en) | System and method for a variable flow converter | |
| DE102012220819B4 (en) | SOUND TRANSFORMERS WITH A FIRST AND A SECOND QUANTITY OF MATCHING COMB | |
| EP3852391B1 (en) | Enhanced performance mems loudspeaker | |
| DE102015103311B4 (en) | Sound transducer structure with single diaphragm | |
| DE102019203914B3 (en) | MEMS with a large fluidically effective surface | |
| DE112007000263B4 (en) | Differential microphone, made in microfabrication | |
| WO2015075222A1 (en) | Micromirror arrangement | |
| DE102012223605A1 (en) | MEMS device for generating pressure pulses | |
| EP3778469A1 (en) | Mems component, assembly comprising the mems component and method for operating the mems component | |
| DE102017200108A1 (en) | Micromechanical sound transducer arrangement and a corresponding manufacturing method | |
| WO2011012365A1 (en) | Piezoelectric energy converter for converting mechanical energy into electrical energy by means of pressure variations, method for converting mechanical energy into electrical energy using the energy converter and the method | |
| CN110661505A (en) | Low-extrusion-film damping micromechanical resonator with large length-width ratio structure | |
| EP4058400A1 (en) | Mems component with in-plane movable element and method for operating same | |
| DE102022209183A1 (en) | Microfluidic interaction element for generating and/or detecting a volume flow of a fluid and an acoustic device with such a microfluidic interaction element | |
| DE102022209186A1 (en) | Microfluidic interaction element for generating and/or detecting a volume flow of a fluid and an acoustic device with such a microfluidic interaction element | |
| WO2024051991A1 (en) | Microfluidic interaction element for generating and/or detecting a volume flow of a fluid and an acoustic device having such a microfluidic interaction element | |
| DE102022208829A1 (en) | MEMS, MEMS speakers and method of making the same | |
| DE102023203237A1 (en) | MEMS SOUND TRANSDUCERS | |
| DE102023203207A1 (en) | Microfluidic component for interacting with a volume flow of a fluid and a device with such a microfluidic component and a manufacturing method for a microfluidic component | |
| WO2023161469A1 (en) | Corrugations or weakened regions on armature structures of vertical mems converter membranes | |
| DE112020007733T5 (en) | Electrostatic transducer and method of making an electrostatic transducer |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AC | Divisional application: reference to earlier application |
Ref document number: 3632135 Country of ref document: EP Kind code of ref document: P |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R079 Free format text: PREVIOUS MAIN CLASS: H04R0019040000 Ipc: H04R0007100000 |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: H04R 19/04 20060101ALI20231123BHEP Ipc: H04R 19/02 20060101ALI20231123BHEP Ipc: H04R 31/00 20060101ALI20231123BHEP Ipc: H04R 19/00 20060101ALI20231123BHEP Ipc: H04R 17/00 20060101ALI20231123BHEP Ipc: H04R 7/10 20060101AFI20231123BHEP |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20240627 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |