EP4144977A1 - Method for powertrain modelling and controlling of the modelled powertrain - Google Patents
Method for powertrain modelling and controlling of the modelled powertrain Download PDFInfo
- Publication number
- EP4144977A1 EP4144977A1 EP22187490.2A EP22187490A EP4144977A1 EP 4144977 A1 EP4144977 A1 EP 4144977A1 EP 22187490 A EP22187490 A EP 22187490A EP 4144977 A1 EP4144977 A1 EP 4144977A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- engine
- ats
- optimization
- control inputs
- nox emissions
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims abstract description 39
- 239000000446 fuel Substances 0.000 claims abstract description 33
- 238000005457 optimization Methods 0.000 claims abstract description 26
- 238000002485 combustion reaction Methods 0.000 claims abstract description 4
- 238000013507 mapping Methods 0.000 claims description 7
- 238000005259 measurement Methods 0.000 claims description 7
- 230000008569 process Effects 0.000 claims description 6
- 238000012360 testing method Methods 0.000 claims description 4
- 238000009499 grossing Methods 0.000 claims description 3
- 238000002347 injection Methods 0.000 claims description 2
- 239000007924 injection Substances 0.000 claims description 2
- 238000010276 construction Methods 0.000 claims 1
- 230000007717 exclusion Effects 0.000 claims 1
- 239000003344 environmental pollutant Substances 0.000 description 7
- 231100000719 pollutant Toxicity 0.000 description 7
- 230000001419 dependent effect Effects 0.000 description 4
- 230000009467 reduction Effects 0.000 description 4
- 238000003491 array Methods 0.000 description 2
- 238000004590 computer program Methods 0.000 description 2
- 238000013400 design of experiment Methods 0.000 description 2
- 238000011161 development Methods 0.000 description 2
- 230000005284 excitation Effects 0.000 description 2
- 239000007789 gas Substances 0.000 description 2
- 230000003993 interaction Effects 0.000 description 2
- 238000013459 approach Methods 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 230000002542 deteriorative effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 239000013618 particulate matter Substances 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 230000009897 systematic effect Effects 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
- 230000001052 transient effect Effects 0.000 description 1
Images



Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/02—Circuit arrangements for generating control signals
- F02D41/14—Introducing closed-loop corrections
- F02D41/1401—Introducing closed-loop corrections characterised by the control or regulation method
- F02D41/1406—Introducing closed-loop corrections characterised by the control or regulation method with use of a optimisation method, e.g. iteration
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/02—Circuit arrangements for generating control signals
- F02D41/14—Introducing closed-loop corrections
- F02D41/1438—Introducing closed-loop corrections using means for determining characteristics of the combustion gases; Sensors therefor
- F02D41/1444—Introducing closed-loop corrections using means for determining characteristics of the combustion gases; Sensors therefor characterised by the characteristics of the combustion gases
- F02D41/146—Introducing closed-loop corrections using means for determining characteristics of the combustion gases; Sensors therefor characterised by the characteristics of the combustion gases the characteristics being an NOx content or concentration
- F02D41/1461—Introducing closed-loop corrections using means for determining characteristics of the combustion gases; Sensors therefor characterised by the characteristics of the combustion gases the characteristics being an NOx content or concentration of the exhaust gases emitted by the engine
- F02D41/1462—Introducing closed-loop corrections using means for determining characteristics of the combustion gases; Sensors therefor characterised by the characteristics of the combustion gases the characteristics being an NOx content or concentration of the exhaust gases emitted by the engine with determination means using an estimation
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/02—Circuit arrangements for generating control signals
- F02D41/14—Introducing closed-loop corrections
- F02D41/1401—Introducing closed-loop corrections characterised by the control or regulation method
- F02D2041/1412—Introducing closed-loop corrections characterised by the control or regulation method using a predictive controller
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/02—Circuit arrangements for generating control signals
- F02D41/14—Introducing closed-loop corrections
- F02D41/1401—Introducing closed-loop corrections characterised by the control or regulation method
- F02D2041/1433—Introducing closed-loop corrections characterised by the control or regulation method using a model or simulation of the system
- F02D2041/1434—Inverse model
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D2200/00—Input parameters for engine control
- F02D2200/02—Input parameters for engine control the parameters being related to the engine
- F02D2200/06—Fuel or fuel supply system parameters
- F02D2200/0625—Fuel consumption, e.g. measured in fuel liters per 100 kms or miles per gallon
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D2200/00—Input parameters for engine control
- F02D2200/02—Input parameters for engine control the parameters being related to the engine
- F02D2200/08—Exhaust gas treatment apparatus parameters
- F02D2200/0802—Temperature of the exhaust gas treatment apparatus
- F02D2200/0804—Estimation of the temperature of the exhaust gas treatment apparatus
Definitions
- the present invention relates to a method and system for controlling powertrains, in particular in the field of industrial and commercial vehicles.
- online optimal control is used to optimize the operation of the combustion engine in a predictive fashion.
- the interaction between the engine and the aftertreatment system (ATS) is considered explicitly during the online optimal control.
- Modern combustion engines have a multitude of engine control inputs that affect their operation, i.e. fuel consumption, pollutant emissions, exhaust enthalpy, etc.
- the calibration of the engine and the ATS is generally developed individually and their interaction is not considered during the development phase.
- the engine control inputs are generally fixed to a single calibration, or a limited number of fixed calibrations are specified (generally two or three).
- the operation of the engine cannot be optimized for the current ATS conditions or the specific driving mission during operation.
- the fixed engine calibration(s) must be selected conservatively. For driving missions where meeting the pollutant limits is easier, e.g. as the ATS temperature is high and the chemical reactions therein are efficient, the engine operation is chosen too conservatively resulting in excessive fuel consumption.
- the main object of the present invention is to provide a method for powertrain modelling and controlling of the modelled powertrain, which overcomes the above problems/drawbacks
- the engine's operation is adapted to the ATS operation and the mission online.
- the objective of the control problem is to minimize the vehicle's fuel consumption, while its constraints include meeting legislative pollutant limits and respecting the limits of the individual powertrain components. This is achieved by considering predictive information about the mission in a model predictive controller online.
- This controller is termed visory controller in the following. It optimizes the operation of the powertrain for the current ATS operation and driving mission in an optimal fashion for the control problem stated above and passes references to the engine's low-level controllers which then set the engine control inputs.
- the present method is based on a pre-optimization, carried out off-line, and an on-line control based on the pre-optimization.
- a multi-objective engine preoptimization is formulated.
- the goal thereby is to minimize the fuel consumption and the NOx emissions of the engine, as well as to maximize the enthalpy provided to the ATS, as the NOx-reduction capability increases with the ATS temperature.
- the pre-optimization it is assured that all mechanical, thermal, drivability, emissions, and comfort limits of the engine are satisfied.
- the problem complexity is reduced to one of finding the desired enthalpy provided to the ATS and the NOx emissions, these are termed engine strategy in the following. Note that instead of having to optimize five engine control inputs, the problem is reduced to that of finding two engine strategy inputs and that no operational limits of the engine need to be considered online. This simplification facilitates solving the optimal control problem online.
- the presented method can be extended to an arbitrary number of engine control inputs.
- the preoptimization will always result in an order reduction from the considered number of engine control inputs, to the number of engine strategy inputs. Due to the systematic, model-based approach of the method, it can easily be transferred to engines of different size, engine control inputs, limits, etc.
- second element does not imply the presence of a "first element”, first, second, etc. are used only for improving the clarity of the description and they should not be interpreted in a limiting way.
- the overall goal is to develop a predictive supervisory controller based on online optimization.
- the on-line optimal control requires solving a complex optimization problem, which is often intractable for the standard choice of control inputs.
- an off-line pre-optimization is disclosed that results in a model order reduction and renders the optimal control problem tractable for online optimization.
- the offline preoptimization includes the six steps shown in Figure 1 .
- the sixth step is optional and thus depicted with dashed lines.
- Figure 2 instead, discloses an example of an online control method based on the pre-optimization disclosed below.
- certain engine control inputs are considered such as SOI, rail pressure, VGT position, EGR (Valve) position, exhaust flap position (arranged between the turbocharger and the ATS) and corresponding outputs are acquired including fuel consumption, engine-out NOx and enthalpy provided to the ATS.
- the Pareto front spanned by the three variables of interest namely the enthalpy provided to the ATS, the engine-out NOx emissions, and the fuel consumption.
- the enthalpy provided to the ATS and the engine-out NOx emissions are considered as inputs that can be optimized by the controller, whereas the resulting fuel consumption is considered as the output of the reduced-order model.
- the on-line controller or simply controller, is a hardware and software entity implemented through the engine control unit ECU.
- the controlling corresponds to the on-line controller.
- the controlling features a high-level supervisory controller and one or more low-level controllers.
- Figure 4 shows the result of the preoptimization for an exemplary engine speed, engine torque, and ATS temperature.
- the plot on the left figure shows the Pareto front given by the scaled and rotated variables introduced later in the present description.
- the plot on the right shows the corresponding Pareto front transformed back to physically meaningful values that are shown normalized.
- the engine operation is restricted to the shown Pareto front identified by the preoptimization.
- the complexity of the control problem to be solved by the supervisory controller can be drastically reduced, without any loss of optimality.
- the considered engine control inputs are
- the outputs of interest for the supervisory controller are the fuel consumption, the engine-out NOx mass flow, the exhaust mass flow, and the exhaust temperature.
- Examples for further outputs that limit the engine operation are the peak cylinder pressure, or the exhaust manifold temperature.
- Gaussian process (GP) models are used, as to model the individual engine outputs.
- the previously developed engine models are evaluated for all possible combinations of the engine control inputs and both the outputs relevant for the supervisory controller and the further outputs. The latter are compared to a previously specified list of limits to the operation of the engine for each point at which the models are evaluated.
- limits include mechanical limits, such as an upper limit on peak cylinder pressure, as well as thermal limits, such as an upper limit on the exhaust temperature, to avoid damage to the engine. Furthermore, drivability limits, such as a lower limit on the torque response, and comfort limits, such as an upper limit on engine noise, need to be considered to fulfil the driver expectations. Emissions limits, such as an upper limit on particulate matter emission, need to be considered to guarantee a clean operation. The limits stated here should be seen as examples, rather than an exhaustive list.
- Step 4 Identify Pareto-optimal engine control input combinations. Out of all the feasible engine control input combinations identified in the previous step, the ones that are Pareto-optimal with respect to a multi-objective optimization are selected and stored.
- the enthalpy provided to the ATS ⁇ ATS is given as
- ⁇ ATS is dependent on the current ATS temperature
- the ATS temperature influences the optimal engine operation and needs to be considered as a further exogenous input during the engine preoptimization (analogous to the engine speed and troque).
- the optimal engine control input combination needs to be found for the operating point defined by the engine speed n e , the engine torque Te, and the ATS temperature ⁇ ATS .
- the non-dominated points in the quantities of interest i.e. the Pareto-optimal points.
- Step 5 Fit a model to describe the Pareto front. This model is fitted in order to characterize the Pareto front and will be evaluated by the online controller.
- Pareto surface features sharp gradients at low JNOx-values, i.e. a coordinate transformation is applied to make the fitting process easier.
- the original points, defined by JHd, JNOx, and J fuel, are mapped to points defined by JHd,rot, J NOx,rot, and Jfuel,rot.
- Figure 4 shows the fitted Pareto front.
- the plot on the left shows the Pareto front given by the scaled and rotated variables.
- the right plot shows the corresponding Pareto front transformed back to physically meaningful values for an exemplary engine speed, engine torque, and ATS temperature.
- the physical units are normalized for readability.
- a 5D global model is stored, that returns the fuel consumption as
- engine-out NOx is given by the engine-out NOx mass flow in the final model.
- the scaled and rotated values are found first. Next, these are transferred back to physically meaningful values using the inverse of the steps shown above.
- the map of the Pareto surface is given by a ( J Hd,rot , J NOx,rot )-grid and the resulting J fuel,rot -values.
- the limits on the map inputs are J Hd rot ⁇ 0,1 J NO x rot ⁇ ⁇ 1 2 , 1 2
- Step 6 the knowledge of the exhaust mass flow is required, as this is needed to evaluate the NOx reduction model of the ATS, hence Step 6 is required. If however, the description of the Pareto front is enough fully capture all variables of interest, this step can be skipped.
- Step 6 is executed.
- the goal thereby is to associate engine control inputs ( ⁇ SOI , p rail , u vgt , u egr , U flap ) to each point on the Pareto front.
- engine control inputs ⁇ SOI , p rail , u vgt , u egr , U flap
- This mapping can be seen as the inverse of the order reduction performed when developing the optimal engine map in Steps 3-5.
- the mapping leads to ambiguity.
- the present step can be carried out considering " Varun Pandey, Stijn van Dooren, Johannes Ritzmann, Benjamin Pla, and Christopher Onder. Variable smoothing of optimal Diesel engine calibration for improved performance and drivability during transient operation. International Journal of Engine Research, 2020 .”
- the deviation of the outputs from those of the Pareto front is used instead of using the deviation of the inputs from those of the Pareto front as part of the objective. This has the benefit, that if the outputs are insensitive to a certain input, this input will be smoothed considerably without deteriorating the overall performance.
- the online-controller features a high-level supervisory controller arranged to solve an optimal control problem
- the supervisory controller solves this optimal control problem in a model predictive control fashion based on predictive mission information and the said pre-optimization.
- the optimal control problem is solved at certain update times and the supervisory controller plans the upcoming operation of the vehicle for a given prediction horizon.
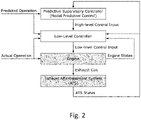
- the proposed control architecture is shown in Figure 2 . It consists of two control levels, namely the high-level predictive supervisory controller that sets the engine strategy inputs and the low-level controller that sets the engine control inputs.
- the boxes labelled "Engine” and "ATS” represent the physical powertrain components.
- the supervisory controller is provided with information about the predicted operation and with the current states of the ATS, i.e. the ATS temperature and the mass of NOx emitted since the start of the mission. Based on this information, the supervisory controller sets the engine strategy inputs.
- three embodiments of the low-level controller are described. Figure 2 is kept general to represent all of them.
- the goal of the low-level controller is to set the engine control inputs, depending on the engine strategy inputs selected by the supervisory controller and the actual operation. Depending on the selected embodiment, the low-level controller further requires information about the predicted operation, the current states of the engine, and the current states of the ATS.
- the solid arrows represent signals that are used by all embodiments of the low-level controller, while dashed arrows represent signals that are only used by some of the embodiments.
- the engine produces exhaust gases at a certain mass flow and temperature and with a certain composition, i.e. pollutant concentration. These exhaust gasses are passed to the ATS and effect its operation.
- This invention can be implemented advantageously in a computer program comprising program code means for performing one or more steps of such method, when such program is run on a computer.
- the patent shall also cover such computer program and the computer-readable medium that comprises a recorded message, such computer-readable medium comprising the program code means for performing one or more steps of such method, when such program is run on a computer.
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Control Of Eletrric Generators (AREA)
- Combined Controls Of Internal Combustion Engines (AREA)
Abstract
Description
- The present invention relates to a method and system for controlling powertrains, in particular in the field of industrial and commercial vehicles. Specifically, online optimal control is used to optimize the operation of the combustion engine in a predictive fashion. The interaction between the engine and the aftertreatment system (ATS) is considered explicitly during the online optimal control.
- Due to ever more stringent pollutant emissions legislation and the drive to reduce the fuel consumption and CO2 emissions of vehicles, the operation of the powertrain needs to be carefully managed. The goal thereby is to minimize fuel consumption while meeting legislative pollutant limits.
- Modern combustion engines have a multitude of engine control inputs that affect their operation, i.e. fuel consumption, pollutant emissions, exhaust enthalpy, etc. Today, the calibration of the engine and the ATS is generally developed individually and their interaction is not considered during the development phase. Furthermore, the engine control inputs are generally fixed to a single calibration, or a limited number of fixed calibrations are specified (generally two or three). As a result, the operation of the engine cannot be optimized for the current ATS conditions or the specific driving mission during operation. To ensure that pollutant limits are always met, the fixed engine calibration(s) must be selected conservatively. For driving missions where meeting the pollutant limits is easier, e.g. as the ATS temperature is high and the chemical reactions therein are efficient, the engine operation is chosen too conservatively resulting in excessive fuel consumption.
- The main object of the present invention is to provide a method for powertrain modelling and controlling of the modelled powertrain, which overcomes the above problems/drawbacks
- To fully exploit the potential of the vehicle's powertrain along a mission, the engine's operation is adapted to the ATS operation and the mission online. The objective of the control problem is to minimize the vehicle's fuel consumption, while its constraints include meeting legislative pollutant limits and respecting the limits of the individual powertrain components. This is achieved by considering predictive information about the mission in a model predictive controller online. This controller, is termed visory controller in the following. It optimizes the operation of the powertrain for the current ATS operation and driving mission in an optimal fashion for the control problem stated above and passes references to the engine's low-level controllers which then set the engine control inputs.
- Generally solving this optimal control problem is very challenging, due to the high dimensionality of the problem resulting from the many engine control inputs that need to be considered. Furthermore, taking into account the operational limits of the engine, e.g. maximum peak cylinder pressure, complicates the problem further. As a result, the optimal control problem in this form is considered too complex to be solved online during operation.
- An offline engine preoptimization to simplify the problem that needs to be solved online is therefore described in the following. Through such an offline preoptimization of the engine operation, all infeasible (engine limits) and all suboptimal combinations of the engine control inputs are excluded during the development phase. The optimal control problem that needs to be solved online using the limited computational power available on the vehicle becomes much simpler.
- Therefore, the present method is based on a pre-optimization, carried out off-line, and an on-line control based on the pre-optimization.
- In the preferred embodiment of the invention, five engine control inputs are considered. Next, a multi-objective engine preoptimization is formulated. The goal thereby is to minimize the fuel consumption and the NOx emissions of the engine, as well as to maximize the enthalpy provided to the ATS, as the NOx-reduction capability increases with the ATS temperature. During the pre-optimization, it is assured that all mechanical, thermal, drivability, emissions, and comfort limits of the engine are satisfied. As a result, instead of having to optimize the engine control inputs and consider the engine limits online, the problem complexity is reduced to one of finding the desired enthalpy provided to the ATS and the NOx emissions, these are termed engine strategy in the following. Note that instead of having to optimize five engine control inputs, the problem is reduced to that of finding two engine strategy inputs and that no operational limits of the engine need to be considered online. This simplification facilitates solving the optimal control problem online.
- Finally, a controller structure is proposed in which a high-level predictive supervisory controller solves the preoptimized optimal control problem online. Three options for how this high-level controller interacts with the lower-level controllers are presented in the following.
- The presented method can be extended to an arbitrary number of engine control inputs. The preoptimization will always result in an order reduction from the considered number of engine control inputs, to the number of engine strategy inputs. Due to the systematic, model-based approach of the method, it can easily be transferred to engines of different size, engine control inputs, limits, etc.
- These and further objects are achieved by means of the attached claims, which describe preferred embodiments of the invention, forming an integral part of the present description.
- The invention will become fully clear from the following detailed description, given by way of a mere exemplifying and non limiting example, to be read with reference to the attached drawing figures, wherein:
-
Fig. 1 shows the pre-optimization process of the present invention, -
Fig. 2 shows an example of online control based on the pre-optimization process offigure 1 ; -
Fig. 3 discloses the rational of the pre-optimization procedure subject of the present invention; -
Fig. 4 shows a three-dimensional Pareto front resulting from the preoptimization and corresponding to the schematic at the bottom offigure 3 for an exemplary engine speed, engine torque, and ATS temperature. - The same reference numerals and letters in the figures designate the same or functionally equivalent parts. According to the present invention, the term "second element" does not imply the presence of a "first element", first, second, etc. are used only for improving the clarity of the description and they should not be interpreted in a limiting way.
- According to the present invention, the overall goal is to develop a predictive supervisory controller based on online optimization. However, as disclosed above, the on-line optimal control requires solving a complex optimization problem, which is often intractable for the standard choice of control inputs.
- According to the present invention, an off-line pre-optimization is disclosed that results in a model order reduction and renders the optimal control problem tractable for online optimization.
- The offline preoptimization includes the six steps shown in
Figure 1 . The sixth step is optional and thus depicted with dashed lines. -
Figure 2 , instead, discloses an example of an online control method based on the pre-optimization disclosed below. -
Figure 3 summarizes the idea under the present pre-optimization. - As can be seen, certain engine control inputs are considered such as SOI, rail pressure, VGT position, EGR (Valve) position, exhaust flap position (arranged between the turbocharger and the ATS) and corresponding outputs are acquired including fuel consumption, engine-out NOx and enthalpy provided to the ATS.
- During the preoptimization, the Pareto front spanned by the three variables of interest, namely the enthalpy provided to the ATS, the engine-out NOx emissions, and the fuel consumption, is identified. To describe the engine operation on the Pareto front, the enthalpy provided to the ATS and the engine-out NOx emissions are considered as inputs that can be optimized by the controller, whereas the resulting fuel consumption is considered as the output of the reduced-order model.
- It should be clear that the on-line controller, or simply controller, is a hardware and software entity implemented through the engine control unit ECU. However, by a method point of view the controlling corresponds to the on-line controller. In addition, as described in the following the controlling features a high-level supervisory controller and one or more low-level controllers.
- The circled variables, i.e., engine speed, engine torque, and ATS temperature are considered as exogenous inputs that are relevant to the operation, but cannot be directly chosen by the online controller. This idea is operatively concretized in the description of the preoptimization procedure.
-
Figure 4 shows the result of the preoptimization for an exemplary engine speed, engine torque, and ATS temperature. The plot on the left figure shows the Pareto front given by the scaled and rotated variables introduced later in the present description. The plot on the right shows the corresponding Pareto front transformed back to physically meaningful values that are shown normalized. Rather than considering the entire possible operation in the online controller, the engine operation is restricted to the shown Pareto front identified by the preoptimization. As a result, the complexity of the control problem to be solved by the supervisory controller can be drastically reduced, without any loss of optimality. - In the following, an explanation of each step of the preoptimization is given:
- Step 1: Take measurements at the engine test bench. The engine is operated at steady-state and all values of interest are logged. In these measurements, all engine control inputs, are excited and the engine speed and torque are varied. The excitation must cover the entire range of operation, i.e. it must not be limited to variations of one variable at a time, but a global excitation of all possible combinations must be performed.
- In the exemplary embodiment of the method, the considered engine control inputs are
- the start of the fuel injection (SOI) ϕ SOI,
- the fuel rail pressure (pRail),
- the position of the variable geometry turbine actuator (uVGT),
- the position of the exhaust gas recirculation valve (UEGR), and
- the position of the exhaust flap (uFlap).
- The experiments are designed based on the Design of Experiments (DoE) method and all the engine control inputs form above, as well as the speed (ne) and torque (Te), are varied at the same time. Automated testing methods can be implemented to acquire such measurement points. Automated testing methods are well known to the skilled person in the art.
- Step 2: Develop engine models. Engine models are developed and calibrated using the previously taken measurements. This allows characterizing the behaviour of the engine at engine control input combinations that were not explicitly measured at the testbench. As a result, the required number of measurements that need to be taken at the testbench can be minimized. These models are then used by the preoptimization in the following steps and must return the outputs relevant for the supervisory controller and further outputs that are compared with engine operation limits.
- In the exemplary embodiment of the method, the outputs of interest for the supervisory controller are the fuel consumption, the engine-out NOx mass flow, the exhaust mass flow, and the exhaust temperature. Examples for further outputs that limit the engine operation are the peak cylinder pressure, or the exhaust manifold temperature. Gaussian process (GP) models, are used, as

- While evaluating these models is computationally expensive, their non-parametric form allows the description of arbitrary data, without prior knowledge. This is a very handy property for the task at hand.
- All GP models map directly from the actuator space to the output, i.e. the engine control inputs are used directly as the inputs to the GP models. As a result, actuator limits are explicitly considered by setting limits on the inputs. - Step 3: Identify feasible engine control input combinations. In the first two steps, global measurements and models were considered, meaning that the engine speed and torque, as well as the engine control inputs were considered as inputs. From here on, the engine speed and torque will be considered as exogenous inputs that cannot be optimized. The following steps of the preoptimization will be carried out for each point on a grid of engine speed and torque individually.
- The previously developed engine models are evaluated for all possible combinations of the engine control inputs and both the outputs relevant for the supervisory controller and the further outputs. The latter are compared to a previously specified list of limits to the operation of the engine for each point at which the models are evaluated.
- These limits include mechanical limits, such as an upper limit on peak cylinder pressure, as well as thermal limits, such as an upper limit on the exhaust temperature, to avoid damage to the engine. Furthermore, drivability limits, such as a lower limit on the torque response, and comfort limits, such as an upper limit on engine noise, need to be considered to fulfil the driver expectations. Emissions limits, such as an upper limit on particulate matter emission, need to be considered to guarantee a clean operation. The limits stated here should be seen as examples, rather than an exhaustive list.
- If a combination of engine control inputs results in "further outputs" that fulfil the engine operation limits, it is considered a candidate for the subsequent optimization and is stored. If one or more of the defined limits is violated, the corresponding operation is considered infeasible and the engine control input combination is discarded.
- Step 4: Identify Pareto-optimal engine control input combinations. Out of all the feasible engine control input combinations identified in the previous step, the ones that are Pareto-optimal with respect to a multi-objective optimization are selected and stored.
- According to the invention the objectives are
- minimize the fuel consumption,
- minimize the engine-out NOx emissions, and
- maximize the enthalpy provided to the ATS.
- The enthalpy provided to the ATS Ḣ ATS is given as

- Where
- ṁexh is the mass flow of exhaust gasses,
- c p,exh is the specific heat of the exhaust gasses
- ϑexh is the temperature of the exhaust gasses and
- ,ϑATS is the temperature of the ATS.
- Because Ḣ ATS is dependent on the current ATS temperature, the ATS temperature influences the optimal engine operation and needs to be considered as a further exogenous input during the engine preoptimization (analogous to the engine speed and troque). In other words, the optimal engine control input combination needs to be found for the operating point defined by the engine speed ne, the engine torque Te, and the ATS temperature ϑATS.
- From the previously identified feasible engine control input combinations, the non-dominated points in the quantities of interest, i.e. the Pareto-optimal points, are identified.
- Step 5: Fit a model to describe the Pareto front. This model is fitted in order to characterize the Pareto front and will be evaluated by the online controller.
- In the exemplary embodiment of the method, we use look-up tables for this model. To make the interpolation more robust, the physical values describing the Pareto front are scaled using their respective minimum and maximum values at the current engine speed, engine torque, and ATS temperature.
- The scaled values are labelled with J and are given as



- Furthermore, as the Pareto surface features sharp gradients at low JNOx-values, i.e.

-
Figure 4 shows the fitted Pareto front. The plot on the left shows the Pareto front given by the scaled and rotated variables. The right plot shows the corresponding Pareto front transformed back to physically meaningful values for an exemplary engine speed, engine torque, and ATS temperature. The physical units are normalized for readability. - In the end, a 5D global model is stored, that returns the fuel consumption as

- During the map evaluation by the online controller, the scaled and rotated values are found first. Next, these are transferred back to physically meaningful values using the inverse of the steps shown above.
- The map of the Pareto surface is given by a (J Hd,rot, J NOx,rot)-grid and the resulting J fuel,rot-values. By design, the limits on the map inputs are


- In addition to the fuel-cost map, we also have to describe the bounds of the feasible region. This is achieved by storing a lower and upper bound of J NOx,rot depending on J Hd,rot and the operating point, i.e. engine speed, engine torque, ATS temperature. In
Figure 4 , these bounds are represented by the respective black lines. - In summary the reduced-order model obtained through the preoptimization contains the following elements:
- operation-point-dependent min/max values for Ḣ ATS, ṁ NOx and ṁ fuel (6 3D-lookup-arrays)
- operation-point-dependent lower/upper bounds JNOx,rot,min/max = f (JHd,rot) (2 4D-lookup-arrays)
- operation-point-dependent fuel-cost map Jfuel,rot = f (JHd,rot, JNOx,rot) (1 5D-lookup-array)
- At low loads, i.e. Te below a certain Torque threshold TT, no engine optimization is considered and a fixed engine calibration is used instead.
- Step 6 (optional) Develop inverse mapping to obtain engine control inputs for each point on the Pareto front.
- While the model developed in the previous steps can capture the Pareto-optimal engine operation, it cannot directly return the corresponding engine control inputs or any intermediate values of interest, such as the intake manifold pressure or the exhaust mass flow, which might be required by an online control structure. In the exemplary embodiment of the method, the knowledge of the exhaust mass flow is required, as this is needed to evaluate the NOx reduction model of the ATS, hence
Step 6 is required. If however, the description of the Pareto front is enough fully capture all variables of interest, this step can be skipped. - Therefore, in case the online control structure requires the engine control inputs or intermediate values,
Step 6 is executed. - The goal thereby is to associate engine control inputs (φ SOI, p rail, u vgt, u egr, U flap) to each point on the Pareto front. In other words, it is desired to develop a mapping from (ϑATS, J Hd, J NOx,rot) to (φ SOI, p rail, u vgt, u egr, u flap) for all operating points (ne, Te).
- This mapping can be seen as the inverse of the order reduction performed when developing the optimal engine map in Steps 3-5. As the target domain (5D for given speed and torque) has a higher dimensionality than the origin domain (3D for given speed and torque), the mapping leads to ambiguity.
- This ambiguity allows to look for the mapping that fulfils a certain objective as well as possible. In the following a method is presented that chooses the inputs as a trade-off between the loss of optimality compared to the Pareto optimal operation, and the smoothness of the inputs in ne-, Te-, JHd-, and JNOx,rot-direction.
- The present step can be carried out considering " Varun Pandey, Stijn van Dooren, Johannes Ritzmann, Benjamin Pla, and Christopher Onder. Variable smoothing of optimal Diesel engine calibration for improved performance and drivability during transient operation. International Journal of Engine Research, 2020 ."
- In the method used here, instead of using the deviation of the inputs from those of the Pareto front as part of the objective, the deviation of the outputs from those of the Pareto front is used. This has the benefit, that if the outputs are insensitive to a certain input, this input will be smoothed considerably without deteriorating the overall performance.
- The smoothness in ϑATS-direction is not considered in order to simplify the smoothing process. As ϑATS varies slowly compared to the other signals, no jumps in the inputs will occur if the maps are non-smooth in ϑATS-direction and this simplification is acceptable.
- According to a preferred embodiment of the invention, the online-controller features a high-level supervisory controller arranged to solve an optimal control problem where
- the objective is the minimization of the fuel consumption
- a specified limit on the tailpipe NOx emissions must not be exceeded
- the evolution of the ATS temperature is captured by a dynamic model and considered in the optimal control problem.
- The supervisory controller solves this optimal control problem in a model predictive control fashion based on predictive mission information and the said pre-optimization. In other words, the optimal control problem is solved at certain update times and the supervisory controller plans the upcoming operation of the vehicle for a given prediction horizon.
- The proposed control architecture is shown in
Figure 2 . It consists of two control levels, namely the high-level predictive supervisory controller that sets the engine strategy inputs and the low-level controller that sets the engine control inputs. The boxes labelled "Engine" and "ATS" represent the physical powertrain components. The supervisory controller is provided with information about the predicted operation and with the current states of the ATS, i.e. the ATS temperature and the mass of NOx emitted since the start of the mission. Based on this information, the supervisory controller sets the engine strategy inputs. In the following, three embodiments of the low-level controller are described.Figure 2 is kept general to represent all of them. The goal of the low-level controller is to set the engine control inputs, depending on the engine strategy inputs selected by the supervisory controller and the actual operation. Depending on the selected embodiment, the low-level controller further requires information about the predicted operation, the current states of the engine, and the current states of the ATS. The solid arrows represent signals that are used by all embodiments of the low-level controller, while dashed arrows represent signals that are only used by some of the embodiments. Depending on the actual operation and the selected engine control inputs, the engine produces exhaust gases at a certain mass flow and temperature and with a certain composition, i.e. pollutant concentration. These exhaust gasses are passed to the ATS and effect its operation. - According to three preferred embodiments of the invention:
- the output of the high-level supervisory controller is passed to a low-level engine controller in the form of optimization weights for engine-out NOx emissions and enthalpy provided to the ATS and the low-level controller is arranged to solve an optimal control problem and set the optimal engine control inputs;
- the output of the high-level supervisory controller is passed to a low-level engine controller in the form of physical references, which are tracked, by the low-level controller that sets the engine control inputs accordingly;
- the inverse model developed in
Step 6 of the preoptimization is used to find the engine control inputs to be set according to the high-level supervisory controller. - This invention can be implemented advantageously in a computer program comprising program code means for performing one or more steps of such method, when such program is run on a computer. For this reason, the patent shall also cover such computer program and the computer-readable medium that comprises a recorded message, such computer-readable medium comprising the program code means for performing one or more steps of such method, when such program is run on a computer.
- Many changes, modifications, variations and other uses and applications of the subject invention will become apparent to those skilled in the art after considering the specification and the accompanying drawings which disclose preferred embodiments thereof as described in the appended claims.
- The features disclosed in the prior art background are introduced only in order to better understand the invention and not as a declaration about the existence of known prior art. In addition, said features define the context of the present invention, thus such features shall be considered in common with the detailed description.
- Further implementation details will not be described, as the man skilled in the art is able to carry out the invention based on the above description.
Claims (11)
- Method for controlling a powertrain including an internal combustion engine and a relating After Treatment System (ATS), the method includingan engine pre-optimization identifying feasible and Pareto optimal engine operation in such a way as to minimize fuel consumption and engine-out NOx emissions and to maximize the enthalpy provided to the ATS,and an on-line controlling of the power-train on the basis of said pre-optimization.
- Method according to claim 1, wherein said pre-optimization includes:- mapping (Steps 1 - 2) of engine-out NOx emissions, exhaust mass flow, exhaust temperature, and fuel consumption and further engine operating outputs on the basis of speed, torque, and a number of engine control inputs,- construction (Steps 3 - 5) of a three-dimensional Pareto front in the space defined by• enthalpy provided to the ATS,• engine-out NOx emissions, and• fuel consumption,for any engine operating point identified by the triple, engine speed, engine torque, and ATS temperature, wherein the operation on the Pareto front is defined by inputs consisting of engine-out NOx emissions and enthalpy provided to the ATS, while the output is the fuel consumption.
- Method according to claim 2, wherein said pre-optimization further comprises (Step 6) the identification of an inverse model relating the operation defined by engine speed, engine torque, ATS temperature, engine-out NOx emissions, and enthalpy provided to the ATS with said number of engine control inputs.
- Method according to claim 2 or 3, wherein said pre-optimization procedure includes the following steps in succession:- (Step 1) steady-state, in terms of speed, torque, and said number of engine control inputs, test bench engine measurements to characterize the engine operation;- (Step 2) engine modelling by means of gaussian process models (GP), in order to define a mapping from an input space defined by combinations of speed and torque and said number of engine control inputs, to the output space, defined by exhaust mass flow, exhaust temperature, engine-out NOx emissions, Fuel consumption, and further engine operating outputs;- (Step 3) exclusion of those engine control input combinations leading to infeasible engine operation on the basis of a comparison of a predetermined list of operating constraints and said further engine operating outputs;- (step 4) calculation of the enthalpy provided to the ATS based on an ATS temperature and identification of Pareto optimal points among the previously identified feasible points,- (Step 5) fitting a model to describe a three-dimensional Pareto front to the feasible and Pareto-optimal points, wherein the model has as inputs enthalpy provided to the ATS and engine-out NOx emissions and as output fuel consumption, for each triple of speed, torque and ATS temperature.
- Method according to claim 4, further comprising- Step (6) smoothing of the engine control input maps by associating a combination of engine control inputs to each point on the Pareto-front.
- Method according to any one of the previous claims, wherein said online-controlling features a high-level supervisory controller arranged to solve an optimal control problem where- the objective is the minimization of the fuel consumption- a specified limit on the tailpipe NOx emissions is not exceeded,- the evolution of the ATS temperature is captured by a dynamic model and considered in the optimal control problem.
- Method according to claim 6, whereby the output of the high-level supervisory controller is passed to a low-level engine controller in the form of optimization weights for engine-out NOx emissions and enthalpy provided to the ATS and the low-level controller is arranged to solve an optimal control problem and set the optimal engine control inputs.
- Method according to claim 6, whereby the output of the high-level supervisory controlling is passed to a low-level engine controller in the form of physical references, which are tracked, by the low-level controller that sets the engine control inputs accordingly.
- Method according to claim 6, whereby the inverse model developed in Step 6 of the preoptimization is used to find the engine control inputs to be set according to the high-level supervisory controller.
- Method according to any one of the previous claims, wherein said number of engine control inputs include:- start of fuel injection- fuel rail pressure- VGT actuator position- EGR valve position- Exhaust flap position.
- Control unit programmed to implement an on-line control powertrain based on a pre-optimization engine model obtained according to all the steps of any one of the previous claims from 1 to 10.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| IT102021000020744A IT202100020744A1 (en) | 2021-08-02 | 2021-08-02 | Method of modeling a powertrain and controlling the modeled powertrain |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP4144977A1 true EP4144977A1 (en) | 2023-03-08 |
Family
ID=78086834
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP22187490.2A Pending EP4144977A1 (en) | 2021-08-02 | 2022-07-28 | Method for powertrain modelling and controlling of the modelled powertrain |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP4144977A1 (en) |
| IT (1) | IT202100020744A1 (en) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20140344320A1 (en) * | 2011-12-12 | 2014-11-20 | Avl List Gmbh | Method for evaluating the solution to a multicriteria optimization problem |
| US20160160787A1 (en) * | 2014-12-04 | 2016-06-09 | Daimler Ag | Controller for controlling an internal combustion engine of a vehicle, in particular a commercial vehicle |
| US20170248091A1 (en) * | 2014-11-17 | 2017-08-31 | Volkswagen Aktiengesellschaft | Control unit for a combustion engine |
| US20190085780A1 (en) * | 2017-09-15 | 2019-03-21 | Toyota Motor Engineering & Manufacturing North America, Inc. | Smoothed and regularized fischer-burmeister solver for embedded real-time constrained optimal control problems in automotive systems |
-
2021
- 2021-08-02 IT IT102021000020744A patent/IT202100020744A1/en unknown
-
2022
- 2022-07-28 EP EP22187490.2A patent/EP4144977A1/en active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20140344320A1 (en) * | 2011-12-12 | 2014-11-20 | Avl List Gmbh | Method for evaluating the solution to a multicriteria optimization problem |
| US20170248091A1 (en) * | 2014-11-17 | 2017-08-31 | Volkswagen Aktiengesellschaft | Control unit for a combustion engine |
| US20160160787A1 (en) * | 2014-12-04 | 2016-06-09 | Daimler Ag | Controller for controlling an internal combustion engine of a vehicle, in particular a commercial vehicle |
| US20190085780A1 (en) * | 2017-09-15 | 2019-03-21 | Toyota Motor Engineering & Manufacturing North America, Inc. | Smoothed and regularized fischer-burmeister solver for embedded real-time constrained optimal control problems in automotive systems |
Non-Patent Citations (1)
| Title |
|---|
| VARUN PANDEYSTIJN VAN DOORENJOHANNES RITZMANNBENJAMIN PLACHRISTOPHER ONDER: "Variable smoothing of optimal Diesel engine calibration for improved performance and drivability during transient operation", INTERNATIONAL JOURNAL OF ENGINE RESEARCH, 2020 |
Also Published As
| Publication number | Publication date |
|---|---|
| IT202100020744A1 (en) | 2023-02-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Togun et al. | Nonlinear modeling and identification of a spark ignition engine torque | |
| US20090306866A1 (en) | Method, control apparatus and powertrain system controller for real-time, self-learning control based on individual operating style | |
| JP2011253536A (en) | Multivariable controller | |
| Isermann et al. | Design of computer controlled combustion engines | |
| Ma et al. | Improvement on the linear and nonlinear auto-regressive model for predicting the NOx emission of diesel engine | |
| Goerke et al. | Optimal control based calibration of rule-based energy management for parallel hybrid electric vehicles | |
| Grahn et al. | Model-based diesel engine management system optimization for transient engine operation | |
| Lee et al. | Scalable mean value modeling for real-time engine simulations with improved consistency and adaptability | |
| Nishio et al. | Optimal calibration scheme for map-based control of diesel engines | |
| Garg et al. | Potential of machine learning methods for robust performance and efficient engine control development | |
| van Dooren et al. | A causal supervisory control strategy for optimal control of a heavy-duty Diesel engine with SCR aftertreatment | |
| Atkinson | Fuel efficiency optimization using rapid transient engine calibration | |
| Koch et al. | Automated function development for emission control with deep reinforcement learning | |
| de Nola et al. | A Model-Based Computer Aided Calibration Methodology Enhancing Accuracy, Time and Experimental Effort Savings Through Regression Techniques and Neural Networks | |
| EP4144977A1 (en) | Method for powertrain modelling and controlling of the modelled powertrain | |
| van Dooren et al. | Optimal control of real driving emissions | |
| Röpke et al. | DoE in engine development | |
| Azmin et al. | Using a statistical machine learning tool for diesel engine air path calibration | |
| Zito et al. | Narmax model identification of a variable geometry turbocharged diesel engine | |
| Fang et al. | Optimal-behavior-based dynamic calibration of the automotive diesel engine | |
| Simani et al. | Fuzzy modelling and control of the air system of a diesel engine | |
| Filev et al. | Learning based approaches to engine mapping and calibration optimization | |
| Kexel et al. | HyFlex-ICE: Highly Flexible Internal Combustion Engines for Hybrid Vehicles | |
| US11719181B2 (en) | Internal combustion engine controller | |
| Nekooei et al. | Hybrid fuzzy logic controller in Matlab/Simulink for controlling AFR of SI engine |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20230811 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |