EP4015342A1 - Vehicle and method for inspecting a railway line - Google Patents
Vehicle and method for inspecting a railway line Download PDFInfo
- Publication number
- EP4015342A1 EP4015342A1 EP21214075.0A EP21214075A EP4015342A1 EP 4015342 A1 EP4015342 A1 EP 4015342A1 EP 21214075 A EP21214075 A EP 21214075A EP 4015342 A1 EP4015342 A1 EP 4015342A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- vehicle
- railway line
- data
- control unit
- stretch
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61K—AUXILIARY EQUIPMENT SPECIALLY ADAPTED FOR RAILWAYS, NOT OTHERWISE PROVIDED FOR
- B61K9/00—Railway vehicle profile gauges; Detecting or indicating overheating of components; Apparatus on locomotives or cars to indicate bad track sections; General design of track recording vehicles
- B61K9/08—Measuring installations for surveying permanent way
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61D—BODY DETAILS OR KINDS OF RAILWAY VEHICLES
- B61D15/00—Other railway vehicles, e.g. scaffold cars; Adaptations of vehicles for use on railways
- B61D15/08—Railway inspection trolleys
- B61D15/12—Railway inspection trolleys power propelled
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L23/00—Control, warning or like safety means along the route or between vehicles or trains
- B61L23/04—Control, warning or like safety means along the route or between vehicles or trains for monitoring the mechanical state of the route
- B61L23/041—Obstacle detection
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L2205/00—Communication or navigation systems for railway traffic
- B61L2205/04—Satellite based navigation systems, e.g. global positioning system [GPS]
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L23/00—Control, warning or like safety means along the route or between vehicles or trains
- B61L23/04—Control, warning or like safety means along the route or between vehicles or trains for monitoring the mechanical state of the route
- B61L23/042—Track changes detection
Definitions
- This invention relates to a vehicle and a method for inspecting a stretch of a railway line.
- Patent document ES2691145B2 discloses a vehicle designed to travel along the tracks in order to inspect the line; the vehicle moves on the line autonomously, if necessary controlled remotely by an operator.
- this solution does not satisfy the need to inspect the railway line in a precise and efficient manner.
- this solution is not very reliable, since the vehicle is easily subject to problems and faults in its movement along the railway line.
- the vehicle which implements said wheels cannot be moved (manually) in an easy manner, precisely due to the heavy weight.
- the wheels receive motor torque from a central motor, which, using suitable transmission systems, transmits the torque to the drive wheels.
- the weight of the transmission is very high and further increases the costs for moving the vehicle.
- the speed of rotation of the wheels should be different, to avoid slipping of the wheels.
- the weight of the vehicle affects the ease of installation of the vehicle on the track, as well as the removal from the track and the movement and transport of the vehicle.
- a lightweight object is very easy to handle, even just by a pair of railway workers.
- the aim of the invention is to provide vehicle and a method for inspecting a stretch of railway line which overcome the above-mentioned drawbacks of the prior art.
- a vehicle for inspecting a railway line in a particularly reliable manner.
- the vehicle comprises a supporting structure.
- the vehicle comprises a cover.
- the cover is associated with the supporting structure.
- the vehicle comprises a plurality of rolling elements (plurality of wheels).
- the plurality of wheels is connected to the frame.
- the plurality of rolling elements is configured to come into contact with the tracks of the railway line, so as to allow the vehicle to move on the tracks, along a stretch of the railway line.
- the vehicle comprises an inspection system.
- the inspection system comprises one or more sensors.
- the inspection system is configured to detect inspection data relative to the stretch of the railway line travelled by the vehicle.
- the vehicle comprises an actuating unit.
- the actuating unit is associated with said plurality of rolling elements for transmitting a drive torque.
- the vehicle comprises a control unit.
- the control unit is connected to the inspection system to receive the inspection data.
- the control unit is programmed to process the inspection data, for deriving information regarding the presence of obstacles to railway traffic along said stretch of railway line.
- control unit is programmed to control the actuating unit in response to the inspection data.
- the vehicle is an autonomous driving vehicle.
- the vehicle is a remote manual driving vehicle, that is to say, the vehicle is driven remotely by an operator who sends driving signals to the control unit by means of a connection to the network.
- the vehicle comprises an electricity accumulator.
- the actuating unit is powered with electricity.
- the actuating unit comprises a plurality of electric motors. Each electric motor of said plurality is associated with a corresponding rolling element of said plurality of rolling elements.
- This embodiment makes it possible to obtain reduced weights and independent control of the individual rolling elements.
- the actuating unit comprises a central electric motor (or internal combustion engine), the drive torque of which is transmitted to each rolling element of said plurality by means of a transmission system.
- the vehicle comprises, for each rolling element of said plurality, a corresponding movement sensor (also referred to below as position sensor).
- the movement sensor is configured to determine movement data (also defined below as dynamic data), preferably representing an angular position of the corresponding rolling element relative to the supporting structure, an angular speed of the corresponding rolling element and/or an angular acceleration of the corresponding rolling element.
- the control unit is configured for controlling the actuating unit in response to the movement data (dynamic data).
- the cover of the frame surrounds, at least partly, one or more of the rolling elements of the plurality of rolling elements. More specifically, according to an embodiment, the cover surrounds all the rolling elements, even though each element is also only partly surrounded. According to other embodiments, the cover surrounds, partly or completely, only some rolling elements of said plurality.
- the covering the rolling elements with the cover reduces the turbulence generated by the latter on the air and thus reduces the resistance of the air.
- the vehicle extends along a longitudinal axis from a second end to a first end in a direction of forward movement.
- the cover extends longitudinally between a first longitudinal end and a second longitudinal end.
- the cover includes a lower wall, facing towards the ground.
- the cover includes an upper wall, opposite the lower wall.
- the upper wall is in a advanced position relative to the lower wall along the longitudinal axis towards the first longitudinal end.
- the upper wall extends along the longitudinal axis up to an end facing in the direction of forward movement of the vehicle which is positioned in an advanced position relative to the corresponding end of the lower wall.
- This feature makes it possible to increase the aerodynamic performance of the vehicle, reducing the overturning moment of the vehicle, thus obtaining negative lift.
- the cover includes a rear wall.
- the rear wall connects the upper wall to the lower wall.
- the rear wall is perpendicular to the longitudinal axis. This truncated tail shape reduces the overall dimensions and the total weight of the vehicle.
- the lower wall is smooth.
- the lower part is made of a heat conductive material to favour the heat exchange of the internal systems, for example, but without limiting the scope of the invention, it might be made of aluminium.
- the supporting structure is a reticular structure.
- the supporting structure comprises a plurality of tubular elements.
- the supporting structure comprises a plurality of nodes. Each node is configured for connecting two or more tubular elements.
- the reticular structure reduces the weight of the vehicle without adversely affecting the mechanical strength.
- the supporting structure is a hyperstatic structure.
- the reticular structure comprises a plurality of articulated couplings.
- Each articulated coupling includes a rotary hinge.
- Each articulated coupling is housed in a corresponding housing of a node and connected to a tubular element of said plurality, for allowing a relative rotation between the node and the tubular element coupled on it.
- the articulated couplings allow, during assembly of the supporting structure, a relative rotation between the tubular element and the node. However, during use of the vehicle, the articulated couplings are constrained to the rotation with the tubular element and the node, making the structure hyperstatic.
- the articulated couplings allow an easier assembly of the reticular structure which, since it is hyperstatic, could be difficult to assemble.
- the vehicle comprises a localisation system.
- the localisation system is configured to determine a geographical position of the vehicle in real time.
- the localisation system preferably includes a GPS localisation system.
- each rolling element of said plurality comprises a first portion, made of aluminium, and a second portion, made of plastic material and configured to enter into contact with the track of the railway line, and wherein the supporting structure is made of carbon.
- the vehicle comprises a differential. The differential is configured for adjusting the rotation of each rolling element of said plurality of rolling elements.
- the control unit comprises a communication module.
- the communication module is configured for sending the inspection data to a remote terminal.
- the communication module is configured for receiving control data from the remote terminal.
- the control unit is programmed to control the actuating unit in response to the control data.
- the control unit includes a read and write memory.
- the read and write memory contains reference values for one or more control parameters.
- the control unit is programmed for controlling the actuation unit on the basis of said reference values.
- control parameters are selected from the following list:
- control unit is programmed for controlling the actuation unit on the basis of said reference values.
- the vehicle comprises a localisation system.
- the localisation system is configured to indicate, preferably but not necessarily in real time, a geographical position of the vehicle.
- the control unit is programmed to stop the actuation unit for a geographical position having a distance from the geographical arrival position less than a predetermined distance.
- control unit is programmed to receive distance data representing a distance in kilometres travelled by the vehicle.
- control unit comprises a mileage counter, in such a way as to know in real time the distance travelled.
- control unit is programmed to stop the actuating unit for distances greater than or equal to a maximum distance value.
- the vehicle would stop (if necessary, with the possibility of reversing the route), on the basis of a predetermined criterion, based, for example, on the route travelled or on the position (measured, for example, by means of a GPS or other localisation system).
- the vehicle comprises an electricity accumulator.
- the actuating unit is powered by the electricity accumulator.
- the control unit is programmed to receive autonomy data, representing an autonomy of the energy accumulator.
- control unit is programmed to stop the actuating unit for values of autonomy of the energy accumulator less than or equal to a predetermined autonomy value.
- this control allows, if the vehicle has not reached the destination, to stop the vehicle before the latter stops due to lack of power supply. In short, it allows the battery to be preserved, avoiding the complete discharge.
- control unit is also programmed to reverse a direction of travel of the vehicle for values of autonomy of the energy accumulator less than or equal to the predetermined autonomy value, to allow a return of the vehicle autonomously.
- control unit is programmed for calculating, preferably but not necessarily in real time, a value of a stopping parameter.
- the stopping parameter is calculated as the ratio between the distance in real time of the vehicle from the geographical destination position and the minimum distance of the vehicle from the geographical destination position.
- control unit is programmed to stop the actuating unit for a value of the stopping parameter greater than a predetermined value.
- This control makes it possible to identify situations in which the vehicle moves towards the geographical destination position, but not sufficiently to ensure that the control unit recognises an arrival and therefore stops the vehicle. In that case, the vehicle, firstly moves towards the destination, reaching a minimum distance and then starts moving away. For this reason, by evaluating the trend of the control parameter, it is possible to evaluate whether the vehicle is moving away from the geographical destination position.
- control unit is also programmed to control the automatic stopping of the vehicle, in response to (the processing of) inspection data; for example, in response to a detection of objects in front on the plane of travel of the vehicle.
- said one or more sensors are configured for detecting inspection data for a zone in front of the vehicle. According to an embodiment, said one or more sensors are configured for detecting inspection data for a zone to the side of the vehicle.
- said one or more sensors include a first Lidar unit, configured for scanning the zone in front of the vehicle.
- said one or more sensors comprise a second Lidar unit, configured for scanning the zone to the side of the vehicle.
- the vehicle comprises a third and a fourth Lidar unit.
- the third Lidar unit is configured for scanning the front zone of the vehicle, in such a way as to make the first Lidar unit redundant.
- the fourth Lidar unit is configured for scanning the side zone of the vehicle, in such a way as to make the second Lidar unit redundant.
- the front scanning comprises two measurements which can be compared with each other to confirm the measurement, according to the current regulations in terms of safety in the railway sector.
- the lateral scanning comprises two measurements which can be compared with each other to confirm the measurement, according to the current regulations in terms of safety in the railway sector.
- the second Lidar unit is positioned on an upper wall of the cover.
- the first Lidar unit is positioned in an advanced position relative to the second Lidar unit, along a direction of forward movement of the vehicle.
- said one or more sensors include one or more video cameras.
- said one or more video cameras are in a stereo configuration.
- Said one or more video cameras are configured for detecting image data, representing images of the stretch of railway line.
- said one or more video cameras are RGB, infrared or thermal video cameras.
- the control unit is programmed to process the image data in order to identify information regarding the nature of the objects which are encountered.
- the control unit is programmed to use object detection algorithms, for identifying the category of object encountered along the route.
- the presence of the video cameras allows the image data to be used to determine the type of objects indicated, in order to provide information not only on the presence or absence of obstacles but also the nature of said obstacles.
- the video cameras allow a video streaming visible by a user terminal and the video recording for a subsequent analysis.
- the vehicle comprises at least one illuminator, that is to say, one or more illuminators.
- the illuminator is positioned on the cover. The illuminator faces in the direction of forward movement.
- the vehicle comprises a flashing light and/or a siren to signal its presence on a stretch of railway line.
- control unit is programmed to receive stretch data, identifying the stretch of the railway line.
- stretch data represents the route defined by the stretch of railway line, that is to say, the presence of bends along the stretch of railway line.
- control unit is programmed to control the actuating unit, on the basis of the stretch data, for adjusting a speed of travel of the vehicle in the presence of bends and/or tunnels.
- control unit is programmed to control the actuating unit on the basis of the inspection data.
- the vehicle comprises a vibration sensor.
- the vibration sensor is configured for determining vibration data, representing a vibration of the vehicle.
- control unit is programmed to reduce a speed of forward movement of the vehicle for values of the vibration of the vehicle greater than a threshold value.
- the vehicle comprises a sensor (inertial measuring unit), configured for detecting acceleration data, representing forces due to accelerations applied to the vehicle.
- the control unit is configured to receive the acceleration data and to determine, on the basis of the acceleration data, slipping and/or transversal forces of the vehicle.
- a system is provided for inspecting a railway line.
- the system comprises a vehicle according to any of the features described above.
- the system comprises a processing unit, located in a stationary position, remote from the vehicle.
- the processing unit is equipped with a user interface, to allow a user to enter control data.
- the processing unit is programmed for receiving the inspection data from the vehicle.
- the processing unit is programmed to send the control data to the vehicle.
- a method for inspecting a stretch of railway line.
- the method comprises a step of preparing a self-propelled vehicle, configured to move on the tracks of the railway line by means of an actuating unit included in the vehicle.
- the vehicle is equipped with sensors for detecting inspection data indicating any obstacles to the railway traffic.
- the method comprises a step of moving the vehicle along the stretch of railway line to be inspected.
- the method comprises a step of detecting inspection data relating to said stretch of line.
- the method comprises a step of processing inspection data.
- the method comprises a step of generating information regarding the presence of obstacles to railway traffic along the stretch of railway line inspected.
- the method comprises a step of processing inspection data, preferably in real time, by a control unit of the vehicle.
- the method comprises a step of autonomous driving of the vehicle, wherein the control unit of the vehicle controls the actuating unit in response to the processing of the inspection data.
- the method comprises a step of setting reference values for one or more control parameters, in the control unit.
- the method comprises a step of controlling the actuating unit on the basis of said reference values, by the control unit.
- the method comprises a step of controlling the actuating unit, on the basis of the inspection data, of the vibration data and/or acceleration data, for limiting the speed or stopping the vehicle in the presence of front obstacles, high transversal accelerations and inadmissible vibrations.
- the vehicle is equipped with a signalling device (visual, acoustic or of another type), to indicate an outcome of the inspection; for example, in order to indicate whether anomalies have been identified or, on the other hand, the route has been found to be clear.
- the warning device is connected to the control unit of the vehicle.
- the indicator may include a luminous indication (red if anomalies have been identified, green if the route is clear) and a corresponding indication on the user terminal.
- a position along the line may also be associated with each alarm on the terminal.
- a further aim of the invention is to provide a wheel and a method for moving a vehicle which overcome at least one of the above-mentioned drawbacks of the prior art.
- the invention provides a wheel of a vehicle for inspecting a railway line.
- the wheel comprises a disc-shaped body.
- the disc-shaped body extends about an axis of rotation.
- the disc-shaped body comprises a first face.
- the disc-shaped body comprises a second face, opposite to the first face.
- the disc-shaped body comprises a side wall.
- the side wall is connected to the first and second faces. The side wall is configured to make contact (at least partly) with a track of the rail of the railway line.
- the wheel comprises a wear element.
- the wear element is made of plastic material.
- the side wall includes a first portion.
- the wear element is superposed on the first portion.
- the wear element defines a first contact surface.
- the first contact surface is designed to make contact with a rolling portion of the track.
- the rolling portion of the track is substantially parallel to the ground.
- the wear element comprises a second portion.
- the second portion defines a second contact surface.
- the second contact surface is (substantially) inclined relative to the axis of rotation to make contact with a contact portion of the track.
- the contact portion of the track rises from the rolling portion and is therefore substantially perpendicular to the ground.
- the wear element allow a part of the wheel to be obtained which is more subject to wear, covered with a wear material.
- the disc-shaped body may be made of a material which has good mechanical strength characteristics but with reduced resistance to wear. The effect is that of being able to use materials which have a very low specific weight compared with that of steel.
- the second contact surface has a distance from the axis of rotation greater than that of the first contact surface.
- the side wall comprises a circumferential step.
- the circumferential step separates the first portion from the second portion of the side wall.
- the height of the step, along a radial direction perpendicular to the axis of rotation, defines a maximum radial thickness of the wear element.
- the end distal from the axis of rotation of the step defines a connecting point between the first and second contact surfaces.
- said point of contact does not comprise discontinuities, protuberances, steps. This allows homogeneous wear of the wear element.
- the wheel comprises an electric motor.
- the electric motor is integrated in the wheel.
- the electric motor forms an integral part of the wheel.
- the electric motor includes a rotor.
- the rotor is connected to the disc-shaped body in order to rotate it.
- the electric motor comprises a stator.
- the stator can be associated with a frame of the vehicle.
- This feature makes it possible to have an autonomous drive force implemented in the wheel, which varies as a function of the power supply of the electric motor. In this way, the speed of rotation of the wheel can be adjusted in real time, avoiding the need for a differential and/or transmissions in the vehicle, with all the obvious advantages in terms of overall dimensions and weight of the vehicle.
- the wheel comprises a supporting plate.
- the supporting plate can be associated with the frame of the vehicle.
- the supporting plate is connected to the stator.
- the vehicle comprises, for each wheel, a connecting counter-plate.
- the connecting counter-plate is connected to the connecting plate, for connecting the wheel to the vehicle.
- the wheel comprises a shaft.
- the shaft is connected to the disc-shaped body.
- the shaft is connected to the rotor, for transferring the rotation of the rotor to the disc-shaped body.
- the shaft is supported by the supporting plate by one or more rolling bearings.
- This embodiment makes it possible to obtain a rolling bearing with reduced dimensions, since it is positioned on the shaft which has a limited diameter. This further contributes to the reduction of the total weight of the wheel and, therefore, of the vehicle.
- the wheel comprises a position transducer.
- the position transducer is configured to determine an angular position of the wheel relative to the frame of the vehicle.
- the position transducer is configured to determine an angular position of the wheel relative to a frame of the vehicle and/or an angular speed of the wheel relative to the frame.
- the position transducer is interposed, along the axis of rotation of the wheel, between the first face of the disc-shaped body and the supporting plate.
- the disc-shaped body comprises a connecting hub.
- the disc-shaped body comprises a plurality of spokes.
- the disc-shaped body comprises an outer crown, defining the side wall.
- the disc-shaped body is made of aluminium.
- the wear element is made of polyurethane.
- the outer diameter of the wheel is included in a range of between 100 mm and 1000 mm, preferably 200 mm and 600 mm, preferably 350 mm and 500 mm.
- the invention provides a method for moving along a track a vehicle for inspecting a railway line.
- the method comprises a step of preparing a plurality of disc-shaped bodies, each extending about an axis of rotation, and including a first face, a second face, opposite the first face, and a side wall, connected to the first and the second face and configured to make contact with the track.
- the method comprises a step of connecting disc-shaped bodies to a frame of the vehicle.
- the method comprises a step of rotating the disc-shaped bodies about the relative axes.
- the disc-shaped body rolls on a rolling portion of the track, resting on a first contact surface, formed by a wear element superposed on a first portion of the side wall of the respective disc-shaped body.
- the disc-shaped body comes into contact with a contact portion of the track in a second contact surface, defined by a second portion of the side wall of the respective disc-shaped body.
- the method comprises a step of preparing a plurality of supporting plates and a corresponding plurality of electric motors, each electric motor having a rotor and a stator.
- each supporting plate is fixed to the frame of the vehicle.
- Each electric motor is interposed between a corresponding supporting plate and a respective disc-shaped body, with the stator fixed to the supporting plate and the rotor fixed to the disc-shaped body.
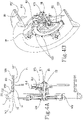
- the numeral 1 denotes a vehicle for inspecting a stretch of railway line.
- the vehicle 1 is configured to advance along a forward direction A in a forward versus VA.
- the vehicle 1 extends along the direction of forward movement between a first end 1A and a second end 1B.
- the vehicle 1 also extends along a transversal direction T, perpendicular to the direction of forward movement A.
- the vehicle 1 has a height along the vertical direction V, perpendicular to the transversal direction T and to the direction of forward movement A.
- the vehicle 1 comprises a supporting structure 10 which is configured to support the components of the vehicle 1 during its forward movement.
- the vehicle 1 comprises a cover 11.
- the cover 11 surrounds the supporting structure 10.
- the cover 11 comprises one or more rounded corners.
- the cover 11 comprises curved profiles, in order to optimise the aerodynamic performance.
- the cover 11 comprises an upper wall 111 and a lower wall 112.
- the cover 11 comprises a front wall 113 and a rear wall 114.
- the cover 11 comprises, on its upper wall 111, a first opening 115.
- the first opening 115 is configured to allow the escape of a sensor.
- the cover 11 comprises, on its upper wall 111, a second opening 116.
- the second opening 116 is configured to allow a sensor to come out.
- the upper wall 111 comprises a first portion and a second portion, positioned, along the vertical direction V, above the first portion.
- the upper wall is ridge shaped, in such a way as to have a raised zone, defining the second portion.
- the first opening 115 and/or the second opening 116 are made on the second portion of the upper wall.
- the lower wall 111 is smooth.
- the front wall 113 includes a portion inclined relative to the vertical direction V.
- the front wall 113 also comprises a portion parallel to the vertical direction V, which joins the upper wall 111 to the inclined portion of the front wall 113.
- the upper wall 111 is in the advanced position, along the direction of forward movement A in the feed direction VA, relative to the lower wall 112. This determines a shape of the front wall 113 of the vehicle which converges towards the upper wall 111.
- the lower wall 112 may be in an advanced position relative to the upper wall 111, along the direction of forward movement A in the feed direction VA.
- the rear wall 114 is perpendicular to the vertical direction V.
- the upper wall 111 and the lower wall 112 interrupt at the same position along the direction of forward movement A (that is, they are vertically aligned V in the rear part).
- the rear part of the vehicle 1 is in the form of a truncated tail.
- the cover 11 comprises two side walls 117, 118.
- Each side wall comprises a pair of curved grooves.
- Each pair of curved grooves is positioned above a corresponding pair of rolling elements of the vehicle 1.
- the supporting structure 10 comprises a plurality of tubular elements 101.
- the supporting structure comprises a plurality of nodes 102.
- the plurality of tubular elements 101 comprises a first group of tubular elements 101A, which is designed to constitute a base of the vehicle. Said tubular elements of the first group of tubular elements 101A are substantially parallel to a horizontal plane, perpendicular to the vertical direction V.
- the plurality of tubular elements 101 comprises a second group of tubular elements 101B, which is designed to form a skeleton extending up from the base of the vehicle 1. Said tubular elements of the second group of tubular elements 101B are perpendicular to the horizontal plane and/or inclined relative to the horizontal plane by an angle less than 90 degrees. Each tubular element 101 of said plurality is connected to another tubular element 101 of said plurality by means of a respective node 102 of said plurality.
- Each node 102 of said plurality comprises one or more of the following features:
- the supporting structure 10 is a hyperstatic structure.
- the supporting structure 10 comprises a supporting framework 103, configured to support one or more sensors in a front zone of the vehicle 1 (that is, at the first end 1A of the vehicle).
- said supporting framework 103 comprises a plurality of rods connected to each other (in a removable or permanent fashion) to create a reticular structure.
- the cross-section of the plurality of rods 103 is less than the cross-section of the plurality of tubular elements 101.
- the supporting structure comprises a plurality of coupling plates 104.
- the coupling plates 104 are connected to a corresponding tubular element 101 of said plurality, at an end of it facing towards the outside of the supporting structure 10. More specifically, the coupling plates face towards the outside of the supporting structure 10.
- Each coupling plate 104 is configured to be connected to a rolling element of the vehicle 1.
- Each coupling plate 104 is preferably provided with one or more holes, for connection to the corresponding rolling element by threaded and/or bolted connections.
- each supporting plate 104 is connected to the respective tubular element 101 by means of a rubberised connection, that is to say, having a predetermined compliance. This allows the supporting plate 104 to transmit to the frame and dampen the stresses it receives from the corresponding rolling element.
- the supporting structure 10 includes a frame; the frame, according to an example embodiment, includes a reticular structure, which may be, for example, formed by the tubular elements 101.
- the frame defines an internal space; according to the example wherein the frame includes the reticular structure, the inner space has openings in communication with an environment outside the frame.
- the cover 11 is connected to the supporting structure 10.
- the cover 11 surrounds (entirely) the frame.
- the cover 11 includes (consists of) a plate; the plate is made of a lightweight material and has a profile designed to reduce a coefficient of friction with the air.
- the cover 11 is connected to the supporting structure 10 in a removable fashion, to facilitate access to the space inside the frame.
- each wheel of the vehicle is connected to the supporting structure 10 independently from the other wheels.
- the vehicle 1 comprises an inspection system 2.
- the inspection system 2 is configured for detecting inspection data 201.
- the inspection data represent the presence or absence of objects along the stretch of railway line.
- the vehicle 1 comprises a control unit 3, configured to control the vehicle 1.
- the inspection system is configured for sending the inspection data 201 to the control unit 3.
- the inspection system 2 comprises a first Lidar unit 21. According to an embodiment, the inspection system 2 comprises a second Lidar unit 22.
- the inspection system 2 comprises a third Lidar unit 23.
- the Lidar units operate by measuring the flight time of a light beam which is made to rotate about an axis (optical beam).
- the first Lidar unit 21 is configured for performing a scanning of the environment located in front of the vehicle 1, on a first plane, parallel to the horizontal plane.
- the second and/or the third Lidar unit 22, 23 is configured to perform a scanning of the environment located above the vehicle 1, on a second plane, substantially vertical.
- the second and/or the third Lidar unit 22, 23 is configured to perform a scanning on a third plane inclined relative to the first and second planes.
- the first Lidar unit 21 is connected to the supporting framework 103.
- the second and/or the third Lidar unit 22, 23 are connected to a corresponding tubular element 101 of said plurality.
- said first, second and/or third Lidar unit 21, 22, 23 are configured to detect obstacle data (or presence data) 211, representing the presence of obstacles in the vicinity of the vehicle 1. More specifically, the Lidar units 21, 22, 23 are configured to send a data vector containing the succession of readings of the sensor with variations in the position of the vehicle 1 and with changes in a beam.
- the readings available could be:
- the inspection system comprises one or more video cameras 24. Said one or more video cameras 24 face towards the moving away direction VA in a direction having at least one component in the direction of forward movement A.
- Said one or more video cameras 24 are configured for detecting image data 241, representing an RGB image of the environment encountered by the vehicle 1 in the stretch of railway line.
- said one or more video cameras 24 are in a stereo configuration, in such a way as to represent a three-dimensional image of the objects encountered in the stretch of railway line.
- the filming on the optical planes of one or more objects present in the scene allows vision algorithms to perform an approximate reconstruction of the three-dimensional position of the objects, and to use this reconstruction to determine the position of the objects with regard to the limit shape.
- the reconstruction of the three-dimensional geometry is generally performed by using in sequence two algorithms of a different type: firstly, the correspondence between the points of one image and those of another is identified, so for each correspondence a triangulation is performed which allows, on the basis of the known information (image points and position/orientation of the chambers) the three-dimensional positions of each correspondence to be reconstructed.
- said first, second and/or third Lidar unit 21, 22, 23 and said one or more video cameras 24 are configured to send to the control unit the obstacle data 211 and the image data 241 to the control unit 3, respectively.
- the inspection system 2 comprises an illuminator (one or more illuminators) 25.
- Said illuminator 25 is configured to illuminate a front zone of the vehicle 1 to allow said one or more video cameras 24 to detect the image data 241 even under poor natural light conditions.
- the vehicle 1 comprises a power supply system 4.
- the power supply system 4 is configured for powering the control unit 3 and the other electronic components of the vehicle 1.
- the power supply system 4 comprises a battery pack 41. Said battery pack rests on the lower wall 112, at the level of the base of the supporting structure 10.
- the power supply system 4 is connected to the control unit 3 for powering it and for sending autonomous data 401, representing an energy autonomy of the power supply system 4.
- the vehicle 1 comprises a communication module 5.
- the communication module 5 is configured to allow a remote connection with remote terminals. More specifically, the communication module 5 allows the exchange of signals with remote terminals.
- the communication module 5 comprises one or more of the following features:
- the vehicle 1 comprises a localisation sensor 6, configured for detecting position data 601, representing a geographical position of the vehicle 1, preferably in real time.
- the localisation sensor 6 is a GPS sensor.
- the localisation sensor is configured to send the position data 601 to the control unit 3.
- the vehicle 1 comprises an alarm system 7.
- the alarm system 7 comprises an acoustic indicator 71.
- the alarm system 7 comprises a luminous indicator 72, if necessary intermittent.
- the alarm system is configured for receiving control signals 301 from the control unit 3.
- the vehicle comprises a local user interface 8, by means of which a user can enter or send signals to the control unit 3.
- the local user interface 8 comprises a main ON/OFF pushbutton 81.
- the control unit 3 is programmed to switch off the electricity supply of the vehicle 1 in response to the selection of the main ON/OFF button 81.
- the control unit 3 comprises a first card 31 and a second card 32.
- the first card 31 is designed for controlling the drive, the localisation sensor 6, the communication module 5 and the alarm system 7.
- the second card 32 is designed for controlling the inspection system 2, in particular the first and the second Lidar unit 21, 22.
- the control unit 3 comprises a third card 33.
- the control unit 3 comprises a dedicated memory for each of said second and third cards 32, 33.
- the second card 32 is designed for controlling and managing the first Lidar unit 21 whilst the third card 33 is designed for controlling and managing the second Lidar unit 22.
- the second and the third card 32, 33 are connected to the first card 31 by an Ethernet cable.
- the vehicle comprises a drive unit, designed for moving the vehicle 1.
- the drive unit comprises a plurality of wheels (rolling elements) 9. More specifically, according to the preferred embodiment, the vehicle comprises four wheels 9.
- the drive unit comprises, for each wheel, one or more of the following components:
- each driver 94 is connected to the control unit 3, preferably to the first card 31 of the control unit 3. According to an embodiment, each driver 94 is connected to the power supply system 4 for receiving a supply of the electrical current.
- the user interface 8 comprises a drive ON/OFF pushbutton.
- the control unit 3 is programmed to switch off the power supply to the driver 94 in response to the selection of the drive ON/OFF button.
- the local user interface 8 is positioned on the cover 11, in a front or rear zone of the vehicle 1.
- each electric motor 91 comprises a rotor 911 and a stator 912.
- the wheel 9 comprises a supporting plate 95.
- the supporting plate 95 comprises a first plurality of connecting holes 951.
- the supporting plate 95 is connected to the coupling plate 104 of the supporting structure 104. More specifically, said first plurality of connecting holes 951 of the supporting plate 95 receive one or more connection bolts which pass through the coupling plate 104.
- the connecting holes 951 of the supporting plate 95 are angularly spaced by ninety degrees from each other.
- the supporting plate 95 comprises a second plurality of connecting holes 952.
- the second plurality of connecting holes 952 is configured to allow a connection between the supporting plate 95 and the stator 912 of the electric motor 91.
- the stator 912 comprises a connection ring 9121, including a plurality of pins, rising from the connecting ring 9121 along a direction parallel to the axis of rotation R of the wheel 9 and which can be screwed to fasten to the connecting ring 9121.
- Said plurality of pins of the connecting ring 9121 inserts into the second plurality of connecting holes 952 of the supporting plate 95.
- the wheel 9 comprises a drive shaft 96, configured to rotate about an axis of rotation R of the wheel 9.
- the wheel 9 comprises a disc-shaped body 97.
- the disc-shaped body comprises an outer crown 971.
- the outer crown has an extension along the axis of rotation R.
- the diameter of the outer crown 971 along the axis of rotation R is variable.
- the disc-shaped body 97 comprises a plurality of spokes 972.
- the disc-shaped body 97 comprises a connecting hub 973.
- the plurality of spokes 972 is connected to an inner surface SI of the outer crown 971.
- the plurality of spokes 972 is connected to an outer surface of the connecting hub 973.
- the thickness of the plurality of spokes 972 along the axis of rotation R is less than the thickness along the axis of rotation R of the outer crown 971.
- the rotor 911 of the electric motor 91 is concentric and coaxial with the stator 912. Moreover, the rotor 911 has a smaller diameter than the stator 912. The stator 912 surrounds the rotor 911.
- the drive shaft 96 is rotated with the rotor 911 of the electric motor 91.
- the drive shaft 96 is rotationally constrained to the rotor 911 of the electric motor 91 by a first key CH1.
- the drive shaft 96 is constrained to the rotation with the disc-shaped body 97.
- the drive shaft 96 is constrained to the rotation with the disc-shaped body 97 by a second key CH2.
- the drive shaft 96 is inserted inside a hub of the supporting plate 95. More specifically, the drive shaft 96 is supported by the supporting plate 95. The drive shaft 96 rests on the hub of the supporting plate 95 by means of one or more rolling bearings CS.
- the position sensor 93 comprises a fixed part 932, which is connected to the supporting plate 95, and a movable part 933, which is constrained and therefore rotatable with the disc-shaped body 97.
- the outer crown 971 comprises a side wall 971'.
- the side wall 971' comprises an inner surface SI, connected to the plurality of spokes 972.
- the side wall 971' comprises an outer surface SE.
- the outer surface CT is shaped to form a first portion P1, substantially parallel to the axis of rotation R, and a second portion P2, inclined relative to the axis of rotation R and, preferably, converging with the axis of rotation in a direction coming out of the vehicle 1.
- the second portion P2 has a curved profile, in particular with a double curve, having opposite curvature (for example S-shaped).
- the first and second portions P1, P2 are joined to each other by means of a step G.
- the second portion P2 is positioned, radially, further from the axis of rotation R relative to the first portion P1.
- the wheel 9 comprises a wear element 98.
- the wear element 98 is superposed on the first portion P1 of the outer surface of the side wall 971'.
- the wear element 98 extends along the axis of rotation R from a first end 98A, in contact with the step G and connected to the second portion P2 of the outer surface of the side wall 971', and a second end 98B, opposite the first end 98A.
- the wear element 98 has a radial thickness variable along the axis of rotation R, which, preferably, but not necessarily, decreases in a direction coming out of the vehicle 1. According to other embodiments, the wear element 98 has a constant radial thickness along the axis of rotation R.
- the maximum radial thickness is defined, according to an embodiment, by the radial height of the step G, in such a way that the wear element defines a continuous surface with the second portion P2 of the outer surface SE of the side wall 971'.
- the surface of the wear element 98 facing in the opposite direction to the axis of rotation R defines a first contact surface SC1.
- Said first contact surface SC1 is designed to roll on a rolling portion of the rails, which is substantially parallel to the horizontal plane.
- the second portion P2 defines a second contact surface SC2.
- the second contact surface SC2 is designed to make contact with a contact surface of the track which is oriented substantially vertically (perpendicular to the rolling portion of the track).
- the second portion P2 defines a third contact surface SC3.
- the third contact surface SC3 faces in a direction substantially opposite the second contact surface SC2.
- the third contact surface SC3 is configured to make contact with a railway counter-track, in the context of railway points sets, wherein the vehicle must continue on a predetermined branch. This avoids the rolling element opposite the rolling element which comes into contact with the counter-track from colliding (jamming) with a frog of the points set.
- the term "counter-track” and "frog”, in the context of a railway points set, is a known and common term for an expert in the trade.
- the side wall 971' comprises a ridge, the two sides of which are defined by the second contact surface SC2 and by the third contact surface SC3.
- said ridge is full, and its inside diameter corresponds, basically, to the internal diameter of the first portion, to form a single wall.
- the ridge is substantially hollow and an insert I, made preferably of plastic material, is housed inside it.
- the wear element is made of plastic material, preferably polyurethane. However, materials are used with a high coefficient of resistance to wear and which have a reduced weight.
- the disc-shaped body 97 (in general the components of the wheel) is made of aluminium.
- control unit 3 is configured to receive one or more of the following input data:
- control unit 3 is programmed for generating control signals 301, on the basis of one or more groups of data in the context of the input data.
- control unit 3 comprises a memory (reading and writing).
- the memory contains reference values for one or more control parameters.
- the control unit 3 is programmed for controlling the actuation unit on the basis of said reference values.
- Said one or more control parameters represent one or more of the following parameters:
- this invention provides a system 1000 for inspecting a stretch of railway line.
- the system 1000 comprises the vehicle 1 according to one or more of the features of the invention.
- the system 1000 comprises a processing unit 1001.
- the processing unit 1001 is located in a stationary position.
- the position of the processing unit 1001 is remote relative to the vehicle.
- the processing unit is equipped with a user interface (remote) 1002, to allow a user to enter control data 1003.
- the processing unit 1001 is programmed to receive the inspection data 201 from the vehicle 1.
- the processing unit 1001 is programmed to send the control data to the vehicle.
- the control data 1003, represents the values of the control parameters saved in the memory of the control unit 3. This makes it possible to suitably program the vehicle 1 remotely before the vehicle starts the actual inspection of the stretch of railway line.
- the control data 1003 is sent by means of the communication module, for example by means of Wi-Fi, LTE or GSMR connection.
- the communication module sends, preferably in real time, information on the vehicle during its travel. Said information is, for example, the status of the sensors, the speed of travel of the vehicle, the geographical position of the vehicle, the distance travelled by the vehicle and/or the video streaming on the stretch of line travelled along.
- the remote processing unit 1001 may be a personal computer, a tablet and/or a smartphone.
- the system comprises a plurality of processing units (remote) 1001, each connected with the vehicle 1 and able to send the control data 1003 to the vehicle 1. This allows a control redundancy on the vehicle 1.
- the control unit 3 is configured for receiving the control data 1003 from a single processing unit 1001 at a time. Moreover, if a processing unit 1001 wishes to send control data 1003 whilst another processing unit 1001 has the control, the control unit 3 is programmed to send an authorisation message to the processing unit 1001 which has the control, to allow the current controller to pass the control of the vehicle to another processing unit 1001.
- the remote user interface 1002 comprises a replication (redundancy) of the main ON/OFF pushbutton 81 and the drive ON/OFF pushbutton.
- the user interface allows the display of the vehicle data in real time.
- control unit 3 is programmed to control the electricity supply to the electric motors 91, on the basis of the position data 601, the dynamic data 931 and the control data (that is, the values of the control parameters) and/or on the basis of the stretch data.
- control unit 3 is programmed to determine a speed of forward movement of the vehicle 1 on the basis of the position data 601 and/or dynamic data 931.
- the control unit 3 is programmed to compare the value of the speed of forward movement with the maximum cruising speed value between the reference values.
- the control unit 3 is programmed to vary the electrical power supply parameters of the motors for reducing a difference between the speed of forward movement and the maximum cruising speed.
- the control unit 3 is programmed to detect a position of the vehicle 1 along the stretch of railway line on the basis of the position data 601 or dynamic data 931. According to an embodiment, the control unit 3 is programmed for evaluating the presence of slowing down conditions along the stretch on the basis of the stretch data. In other words, the control unit 3 is programmed to recognise in advance the approach towards bends and/or tunnels.
- the control unit 3 is programmed to vary the electrical power supply parameters of the motors to slow down the speed of forward movement of the vehicle at bends and/or tunnels.
- control unit 3 is programmed to identify one or more slowing down conditions.
- the control unit 3 is programmed to slow down the speed for forward movement if at least one of said one or more slowing down conditions occurs.
- control unit 3 is programmed to slow down the speed of forward movement of the vehicle 1 in a manner proportional to a distance of the vehicle 1 from a obstacle in front, detected on the basis of the inspection data 201. According to an embodiment, said slowing down of the vehicle 1 ends with the stopping, to prevent the collision with the lateral obstacle.
- the vehicle 1 comprises an accelerometer (IMU sensor), programmed to detect vibration data, representing a vibration of the vehicle 1.
- IMU sensor an accelerometer
- Said one or more slowing down conditions include one or more of the following conditions:
- control unit 3 is programmed, in the absence of slowing down conditions, to control the drive unit of the vehicle to perform the inspection according to a speed of forward movement profile including a first acceleration step up to the maximum cruising speed, a second step of advancing at a constant speed and a third slowing down step until stopping at the geographical arrival position.
- control unit 3 is programmed to identify one or more stopping conditions.
- the control unit 3 is programmed to stop the vehicle 1 if at least one of said one or more stop conditions occurs.
- Said one or more stop conditions include one or more of the following conditions:
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
Description
- This invention relates to a vehicle and a method for inspecting a stretch of a railway line.
- In the railway sector, maintenance operations are required on the railway line at quite regular intervals. These operations may be small maintenance operations or more substantial operations, which require the preparation of a railway construction site.
- In both cases, these operations involve the use of machinery, tools, trains and materials of various types which, during the operations, may be positioned on the tracks or close to the latter.
- When the maintenance activities are completed, the workers remove the equipment and the materials used in order to re-establish the circulation of trains along the railway line on which operations have been performed. This activity is of critical importance since the failure to remove equipment and/or materials could constitute an obstacle for the train, which could therefore be damaged or, in the worst case, could be subject to a accident which is dangerous for individuals.
- For this reason, before re-activating circulation, it is important to check the absence of obstacles to the circulation of trains.
- However, the removal and control performed by the workers is, by its very nature, subject to human error.
- In order to examine whether the railway line is clear, in some cases it is envisaged to travel along it with a railway vehicle guided by an authorised operator, who, proceeding at reduced speed, checks that the railway line does not have obstructions. This solution is, however, very slow and is in any case, even if only partly, carried out by human control.
- Patent document
ES2691145B2 - In addition to the above, it should be noted that in the sector of railway vehicles the use of large wheels is known, which roll on the tracks of the high speed railway line. These wheel solutions are subject to very high wear due to the high speed of rotation. Said wheels, in order to resist wear, are made of steel.
- However, the production of steel wheels means that the wheels are very heavy and, therefore, the cost of moving the vehicle is greater.
- Moreover, the vehicle which implements said wheels cannot be moved (manually) in an easy manner, precisely due to the heavy weight. Moreover, again in the sector of industrial vehicles, the wheels receive motor torque from a central motor, which, using suitable transmission systems, transmits the torque to the drive wheels.
- However, the weight of the transmission is very high and further increases the costs for moving the vehicle. Moreover, on very curved stretches, the speed of rotation of the wheels should be different, to avoid slipping of the wheels.
- Thus, the weight of the vehicle affects the ease of installation of the vehicle on the track, as well as the removal from the track and the movement and transport of the vehicle. In effect, a lightweight object is very easy to handle, even just by a pair of railway workers.
- Lastly, it should be noted that the prior art vehicles are driven and controlled manually, with the need to provide an operator on board who brakes, stops and restarts the vehicle according to the instructions which are given and the direct observations of the driver. This solution has obvious drawbacks, as it is subject to human error. Not less important, the presence of a driver requires that there is a control cabin, the overall size of which makes the vehicle necessarily not transportable manually.
- Other solutions which illustrate a vehicle and a method for inspecting a stretch of railway line are illustrated in the following patent documents:
US2019256113A1 ,IT201800009264A1 US5786750A ,US2016368510A1 ,US5429329A andDE102018119151A1 . These documents describe solutions which have various drawbacks, for example limited control over the route of the vehicle, fallible control logics which reduce the reliability of the system and a shape which has a low aerodynamic efficiency that translates into a high consumption per unit of space. - The aim of the invention is to provide vehicle and a method for inspecting a stretch of railway line which overcome the above-mentioned drawbacks of the prior art.
- Said aim is fully achieved by the vehicle and the method according to the invention as characterised in the appended claims.
- According to an aspect of the invention, a vehicle is provided for inspecting a railway line in a particularly reliable manner.
- The vehicle comprises a supporting structure. The vehicle comprises a cover. The cover is associated with the supporting structure.
- The vehicle comprises a plurality of rolling elements (plurality of wheels). The plurality of wheels is connected to the frame. The plurality of rolling elements is configured to come into contact with the tracks of the railway line, so as to allow the vehicle to move on the tracks, along a stretch of the railway line.
- The vehicle comprises an inspection system. The inspection system comprises one or more sensors. The inspection system is configured to detect inspection data relative to the stretch of the railway line travelled by the vehicle.
- The vehicle comprises an actuating unit. The actuating unit is associated with said plurality of rolling elements for transmitting a drive torque.
- The vehicle comprises a control unit. The control unit is connected to the inspection system to receive the inspection data. The control unit is programmed to process the inspection data, for deriving information regarding the presence of obstacles to railway traffic along said stretch of railway line.
- According to an embodiment, the control unit is programmed to control the actuating unit in response to the inspection data.
- This makes it possible to monitor and control the vehicle autonomously, in such a way as to allow a control of the stretch of railway line which is assigned to the inspection system. In other words, the vehicle is an autonomous driving vehicle.
- According to other embodiments, the vehicle is a remote manual driving vehicle, that is to say, the vehicle is driven remotely by an operator who sends driving signals to the control unit by means of a connection to the network.
- According to an embodiment, the vehicle comprises an electricity accumulator. According to this embodiment, the actuating unit is powered with electricity. According to an embodiment, the actuating unit comprises a plurality of electric motors. Each electric motor of said plurality is associated with a corresponding rolling element of said plurality of rolling elements.
- This embodiment makes it possible to obtain reduced weights and independent control of the individual rolling elements.
- According to a further embodiment, the actuating unit comprises a central electric motor (or internal combustion engine), the drive torque of which is transmitted to each rolling element of said plurality by means of a transmission system.
- According to an embodiment, the vehicle comprises, for each rolling element of said plurality, a corresponding movement sensor (also referred to below as position sensor). The movement sensor is configured to determine movement data (also defined below as dynamic data), preferably representing an angular position of the corresponding rolling element relative to the supporting structure, an angular speed of the corresponding rolling element and/or an angular acceleration of the corresponding rolling element. The control unit is configured for controlling the actuating unit in response to the movement data (dynamic data). According to an embodiment, the cover of the frame surrounds, at least partly, one or more of the rolling elements of the plurality of rolling elements. More specifically, according to an embodiment, the cover surrounds all the rolling elements, even though each element is also only partly surrounded. According to other embodiments, the cover surrounds, partly or completely, only some rolling elements of said plurality.
- The covering the rolling elements with the cover reduces the turbulence generated by the latter on the air and thus reduces the resistance of the air.
- The vehicle extends along a longitudinal axis from a second end to a first end in a direction of forward movement. The cover extends longitudinally between a first longitudinal end and a second longitudinal end. The cover includes a lower wall, facing towards the ground. The cover includes an upper wall, opposite the lower wall.
- According to an embodiment, the upper wall is in a advanced position relative to the lower wall along the longitudinal axis towards the first longitudinal end.
- In other words, the upper wall extends along the longitudinal axis up to an end facing in the direction of forward movement of the vehicle which is positioned in an advanced position relative to the corresponding end of the lower wall.
- This feature makes it possible to increase the aerodynamic performance of the vehicle, reducing the overturning moment of the vehicle, thus obtaining negative lift.
- The cover includes a rear wall. The rear wall connects the upper wall to the lower wall. The rear wall is perpendicular to the longitudinal axis. This truncated tail shape reduces the overall dimensions and the total weight of the vehicle.
- According to an embodiment, the lower wall is smooth. Preferably, the lower part is made of a heat conductive material to favour the heat exchange of the internal systems, for example, but without limiting the scope of the invention, it might be made of aluminium.
- This allows a laminar flow of the air which reduces the resistance of the air as the vehicle moves forward.
- According to an embodiment, the supporting structure is a reticular structure. The supporting structure comprises a plurality of tubular elements. The supporting structure comprises a plurality of nodes. Each node is configured for connecting two or more tubular elements.
- The reticular structure reduces the weight of the vehicle without adversely affecting the mechanical strength.
- According to an embodiment, the supporting structure is a hyperstatic structure. The reticular structure comprises a plurality of articulated couplings.
- Each articulated coupling includes a rotary hinge. Each articulated coupling is housed in a corresponding housing of a node and connected to a tubular element of said plurality, for allowing a relative rotation between the node and the tubular element coupled on it.
- The articulated couplings allow, during assembly of the supporting structure, a relative rotation between the tubular element and the node. However, during use of the vehicle, the articulated couplings are constrained to the rotation with the tubular element and the node, making the structure hyperstatic.
- The articulated couplings allow an easier assembly of the reticular structure which, since it is hyperstatic, could be difficult to assemble.
- According to an embodiment, the vehicle comprises a localisation system. The localisation system is configured to determine a geographical position of the vehicle in real time. The localisation system preferably includes a GPS localisation system.
- According to an embodiment, each rolling element of said plurality comprises a first portion, made of aluminium, and a second portion, made of plastic material and configured to enter into contact with the track of the railway line, and wherein the supporting structure is made of carbon. According to an embodiment, the vehicle comprises a differential. The differential is configured for adjusting the rotation of each rolling element of said plurality of rolling elements.
- The control unit comprises a communication module. The communication module is configured for sending the inspection data to a remote terminal. The communication module is configured for receiving control data from the remote terminal. The control unit is programmed to control the actuating unit in response to the control data.
- The control unit includes a read and write memory. The read and write memory contains reference values for one or more control parameters. The control unit is programmed for controlling the actuation unit on the basis of said reference values.
- The control parameters are selected from the following list:
- cruising speed;
- maximum speed;
- distance in kilometres;
- maximum distance in kilometres;
- geographical starting position;
- geographical arrival position;
- interruption of the journey, or not, if there is an object which prevents the vehicle from moving forward;
- number and type of sensors active between said one or more sensors;
- detection distance of said one or more sensors.
- According to an embodiment, the control unit is programmed for controlling the actuation unit on the basis of said reference values.
- According to an embodiment, the vehicle comprises a localisation system. The localisation system is configured to indicate, preferably but not necessarily in real time, a geographical position of the vehicle.
- The control unit is programmed to stop the actuation unit for a geographical position having a distance from the geographical arrival position less than a predetermined distance.
- This allows the vehicle to determine autonomously when it has reached the destination.
- According to an embodiment, the control unit is programmed to receive distance data representing a distance in kilometres travelled by the vehicle. In other words, the control unit comprises a mileage counter, in such a way as to know in real time the distance travelled. According to an embodiment, the control unit is programmed to stop the actuating unit for distances greater than or equal to a maximum distance value.
- In that way, if the vehicle follows a incorrect route, continuing to move away from the geographical destination position, the vehicle would stop (if necessary, with the possibility of reversing the route), on the basis of a predetermined criterion, based, for example, on the route travelled or on the position (measured, for example, by means of a GPS or other localisation system).
- According to an embodiment, the vehicle comprises an electricity accumulator. The actuating unit is powered by the electricity accumulator. The control unit is programmed to receive autonomy data, representing an autonomy of the energy accumulator.
- According to an embodiment, the control unit is programmed to stop the actuating unit for values of autonomy of the energy accumulator less than or equal to a predetermined autonomy value.
- This always allows the geographical starting position to be always returned to, since, preferably, the predetermined autonomy value is equal to the value of electricity necessary to return the vehicle to the geographical starting position. In any case, this control allows, if the vehicle has not reached the destination, to stop the vehicle before the latter stops due to lack of power supply. In short, it allows the battery to be preserved, avoiding the complete discharge.
- According to a possible embodiment, the control unit is also programmed to reverse a direction of travel of the vehicle for values of autonomy of the energy accumulator less than or equal to the predetermined autonomy value, to allow a return of the vehicle autonomously.
- According to an embodiment, the control unit is programmed for calculating, preferably but not necessarily in real time, a value of a stopping parameter. The stopping parameter is calculated as the ratio between the distance in real time of the vehicle from the geographical destination position and the minimum distance of the vehicle from the geographical destination position.
- According to an embodiment, the control unit is programmed to stop the actuating unit for a value of the stopping parameter greater than a predetermined value.
- This control makes it possible to identify situations in which the vehicle moves towards the geographical destination position, but not sufficiently to ensure that the control unit recognises an arrival and therefore stops the vehicle. In that case, the vehicle, firstly moves towards the destination, reaching a minimum distance and then starts moving away. For this reason, by evaluating the trend of the control parameter, it is possible to evaluate whether the vehicle is moving away from the geographical destination position.
- According to an example embodiment, the control unit is also programmed to control the automatic stopping of the vehicle, in response to (the processing of) inspection data; for example, in response to a detection of objects in front on the plane of travel of the vehicle.
- According to an embodiment, said one or more sensors are configured for detecting inspection data for a zone in front of the vehicle. According to an embodiment, said one or more sensors are configured for detecting inspection data for a zone to the side of the vehicle.
- According to an embodiment, said one or more sensors include a first Lidar unit, configured for scanning the zone in front of the vehicle. According to an embodiment, said one or more sensors comprise a second Lidar unit, configured for scanning the zone to the side of the vehicle.
- According to a particularly advantageous embodiment, the vehicle comprises a third and a fourth Lidar unit. The third Lidar unit is configured for scanning the front zone of the vehicle, in such a way as to make the first Lidar unit redundant. The fourth Lidar unit is configured for scanning the side zone of the vehicle, in such a way as to make the second Lidar unit redundant.
- According to this embodiment, the front scanning comprises two measurements which can be compared with each other to confirm the measurement, according to the current regulations in terms of safety in the railway sector. According to this embodiment, the lateral scanning comprises two measurements which can be compared with each other to confirm the measurement, according to the current regulations in terms of safety in the railway sector.
- According to an embodiment, the second Lidar unit is positioned on an upper wall of the cover. According to an embodiment, the first Lidar unit is positioned in an advanced position relative to the second Lidar unit, along a direction of forward movement of the vehicle.
- According to an embodiment, said one or more sensors include one or more video cameras. According to one of the possible embodiments, said one or more video cameras are in a stereo configuration. Said one or more video cameras are configured for detecting image data, representing images of the stretch of railway line. According to an embodiment, said one or more video cameras are RGB, infrared or thermal video cameras. According to an embodiment, the control unit is programmed to process the image data in order to identify information regarding the nature of the objects which are encountered. The control unit is programmed to use object detection algorithms, for identifying the category of object encountered along the route.
- The presence of the video cameras allows the image data to be used to determine the type of objects indicated, in order to provide information not only on the presence or absence of obstacles but also the nature of said obstacles.
- According to an embodiment, the video cameras allow a video streaming visible by a user terminal and the video recording for a subsequent analysis.
- According to an embodiment, the vehicle comprises at least one illuminator, that is to say, one or more illuminators. Preferably, the illuminator is positioned on the cover. The illuminator faces in the direction of forward movement.
- According to an embodiment, the vehicle comprises a flashing light and/or a siren to signal its presence on a stretch of railway line.
- According to an embodiment, the control unit is programmed to receive stretch data, identifying the stretch of the railway line. In other words, the stretch data represents the route defined by the stretch of railway line, that is to say, the presence of bends along the stretch of railway line. According to an embodiment, the control unit is programmed to control the actuating unit, on the basis of the stretch data, for adjusting a speed of travel of the vehicle in the presence of bends and/or tunnels.
- According to an embodiment, the control unit is programmed to control the actuating unit on the basis of the inspection data.
- According to an embodiment, the vehicle comprises a vibration sensor. The vibration sensor is configured for determining vibration data, representing a vibration of the vehicle.
- According to an embodiment, the control unit is programmed to reduce a speed of forward movement of the vehicle for values of the vibration of the vehicle greater than a threshold value.
- According to an embodiment, the vehicle comprises a sensor (inertial measuring unit), configured for detecting acceleration data, representing forces due to accelerations applied to the vehicle. The control unit is configured to receive the acceleration data and to determine, on the basis of the acceleration data, slipping and/or transversal forces of the vehicle. According to an aspect of the invention, a system is provided for inspecting a railway line.
- The system comprises a vehicle according to any of the features described above. The system comprises a processing unit, located in a stationary position, remote from the vehicle. The processing unit is equipped with a user interface, to allow a user to enter control data. The processing unit is programmed for receiving the inspection data from the vehicle. The processing unit is programmed to send the control data to the vehicle.
- According to an aspect of the invention, a method is provided for inspecting a stretch of railway line.
- The method comprises a step of preparing a self-propelled vehicle, configured to move on the tracks of the railway line by means of an actuating unit included in the vehicle. The vehicle is equipped with sensors for detecting inspection data indicating any obstacles to the railway traffic. The method comprises a step of moving the vehicle along the stretch of railway line to be inspected. The method comprises a step of detecting inspection data relating to said stretch of line.
- The method comprises a step of processing inspection data.
- The method comprises a step of generating information regarding the presence of obstacles to railway traffic along the stretch of railway line inspected.
- According to an embodiment, the method comprises a step of processing inspection data, preferably in real time, by a control unit of the vehicle. The method comprises a step of autonomous driving of the vehicle, wherein the control unit of the vehicle controls the actuating unit in response to the processing of the inspection data.
- According to an embodiment, the method comprises a step of setting reference values for one or more control parameters, in the control unit. The method comprises a step of controlling the actuating unit on the basis of said reference values, by the control unit.
- The method comprises a step of controlling the actuating unit, on the basis of the inspection data, of the vibration data and/or acceleration data, for limiting the speed or stopping the vehicle in the presence of front obstacles, high transversal accelerations and inadmissible vibrations.
- It should also be noted that, according to an example embodiment, the vehicle is equipped with a signalling device (visual, acoustic or of another type), to indicate an outcome of the inspection; for example, in order to indicate whether anomalies have been identified or, on the other hand, the route has been found to be clear. The warning device is connected to the control unit of the vehicle. There is also a corresponding indication on the user terminal. For example, the indicator may include a luminous indication (red if anomalies have been identified, green if the route is clear) and a corresponding indication on the user terminal. A position along the line may also be associated with each alarm on the terminal.
- A further aim of the invention is to provide a wheel and a method for moving a vehicle which overcome at least one of the above-mentioned drawbacks of the prior art.
- Said aim is fully achieved by the wheel and the method according to the invention as characterised in the appended claims.
- The invention provides a wheel of a vehicle for inspecting a railway line.
- The wheel comprises a disc-shaped body. The disc-shaped body extends about an axis of rotation. The disc-shaped body comprises a first face. The disc-shaped body comprises a second face, opposite to the first face. The disc-shaped body comprises a side wall. The side wall is connected to the first and second faces. The side wall is configured to make contact (at least partly) with a track of the rail of the railway line.
- The wheel comprises a wear element. The wear element is made of plastic material.
- According to an embodiment, the side wall includes a first portion. The wear element is superposed on the first portion. The wear element defines a first contact surface. The first contact surface is designed to make contact with a rolling portion of the track. The rolling portion of the track is substantially parallel to the ground.
- The wear element comprises a second portion. The second portion defines a second contact surface. The second contact surface is (substantially) inclined relative to the axis of rotation to make contact with a contact portion of the track. The contact portion of the track rises from the rolling portion and is therefore substantially perpendicular to the ground.
- The presence and the positioning of the wear element allow a part of the wheel to be obtained which is more subject to wear, covered with a wear material. In this way, the disc-shaped body may be made of a material which has good mechanical strength characteristics but with reduced resistance to wear. The effect is that of being able to use materials which have a very low specific weight compared with that of steel.
- According to an embodiment, the second contact surface has a distance from the axis of rotation greater than that of the first contact surface.
- According to an embodiment, the side wall comprises a circumferential step. The circumferential step separates the first portion from the second portion of the side wall. According to an embodiment, the height of the step, along a radial direction perpendicular to the axis of rotation, defines a maximum radial thickness of the wear element. In other words, the end distal from the axis of rotation of the step defines a connecting point between the first and second contact surfaces. Preferably, said point of contact does not comprise discontinuities, protuberances, steps. This allows homogeneous wear of the wear element.
- According to an embodiment, the wheel comprises an electric motor. Preferably, the electric motor is integrated in the wheel. In other words, the electric motor forms an integral part of the wheel.
- The electric motor includes a rotor. The rotor is connected to the disc-shaped body in order to rotate it. The electric motor comprises a stator.
- The stator can be associated with a frame of the vehicle.
- This feature makes it possible to have an autonomous drive force implemented in the wheel, which varies as a function of the power supply of the electric motor. In this way, the speed of rotation of the wheel can be adjusted in real time, avoiding the need for a differential and/or transmissions in the vehicle, with all the obvious advantages in terms of overall dimensions and weight of the vehicle.
- According to an embodiment, the wheel comprises a supporting plate. The supporting plate can be associated with the frame of the vehicle. The supporting plate is connected to the stator.
- According to an embodiment, the vehicle comprises, for each wheel, a connecting counter-plate. The connecting counter-plate is connected to the connecting plate, for connecting the wheel to the vehicle.
- According to an embodiment, the wheel comprises a shaft. The shaft is connected to the disc-shaped body. The shaft is connected to the rotor, for transferring the rotation of the rotor to the disc-shaped body. The shaft is supported by the supporting plate by one or more rolling bearings.
- This embodiment makes it possible to obtain a rolling bearing with reduced dimensions, since it is positioned on the shaft which has a limited diameter. This further contributes to the reduction of the total weight of the wheel and, therefore, of the vehicle.
- According to an embodiment, the wheel comprises a position transducer. The position transducer is configured to determine an angular position of the wheel relative to the frame of the vehicle.
- The position transducer is configured to determine an angular position of the wheel relative to a frame of the vehicle and/or an angular speed of the wheel relative to the frame.
- According to an embodiment, the position transducer is interposed, along the axis of rotation of the wheel, between the first face of the disc-shaped body and the supporting plate.
- According to an embodiment, the disc-shaped body comprises a connecting hub. The disc-shaped body comprises a plurality of spokes. The disc-shaped body comprises an outer crown, defining the side wall. According to a preferred embodiment, the disc-shaped body is made of aluminium. According to a preferred embodiment, the wear element is made of polyurethane.
- According to an embodiment, the outer diameter of the wheel is included in a range of between 100 mm and 1000 mm, preferably 200 mm and 600 mm, preferably 350 mm and 500 mm.
- According to an aspect of the invention, the invention provides a method for moving along a track a vehicle for inspecting a railway line.
- The method comprises a step of preparing a plurality of disc-shaped bodies, each extending about an axis of rotation, and including a first face, a second face, opposite the first face, and a side wall, connected to the first and the second face and configured to make contact with the track. The method comprises a step of connecting disc-shaped bodies to a frame of the vehicle. The method comprises a step of rotating the disc-shaped bodies about the relative axes.
- According to an embodiment of the method, the disc-shaped body rolls on a rolling portion of the track, resting on a first contact surface, formed by a wear element superposed on a first portion of the side wall of the respective disc-shaped body.
- According to an embodiment of the method, the disc-shaped body comes into contact with a contact portion of the track in a second contact surface, defined by a second portion of the side wall of the respective disc-shaped body.
- According to an embodiment, the method comprises a step of preparing a plurality of supporting plates and a corresponding plurality of electric motors, each electric motor having a rotor and a stator.
- During said preparing step, each supporting plate is fixed to the frame of the vehicle. Each electric motor is interposed between a corresponding supporting plate and a respective disc-shaped body, with the stator fixed to the supporting plate and the rotor fixed to the disc-shaped body.
- These and other features will become more apparent from the following detailed description of a preferred embodiment, illustrated by way of nonlimiting example in the accompanying drawings, in which:
-
Figure 1 is a perspective view of a vehicle for inspecting a stretch of railway line; -
Figure 2 illustrates a supporting structure of the vehicle ofFigure 1 ; -
Figure 3 is a perspective view of a wheel of the vehicleFigure 1 ; -
Figures 4A and 4B illustrate, respectively, a first and a second cross-section of the wheel ofFigure 3 ; -
Figure 5 schematically illustrates a control diagram of the vehicle ofFigure 1 ; -
Figure 6 schematically illustrates a control logic of the vehicle ofFigure 1 . - With reference to the accompanying drawings, the
numeral 1 denotes a vehicle for inspecting a stretch of railway line. Thevehicle 1 is configured to advance along a forward direction A in a forward versus VA. Thevehicle 1 extends along the direction of forward movement between afirst end 1A and asecond end 1B. Thevehicle 1 also extends along a transversal direction T, perpendicular to the direction of forward movement A. Lastly, thevehicle 1 has a height along the vertical direction V, perpendicular to the transversal direction T and to the direction of forward movement A. Thevehicle 1 comprises a supportingstructure 10 which is configured to support the components of thevehicle 1 during its forward movement. Thevehicle 1 comprises acover 11. Thecover 11 surrounds the supportingstructure 10. Thecover 11 comprises one or more rounded corners. Thecover 11 comprises curved profiles, in order to optimise the aerodynamic performance. Thecover 11 comprises anupper wall 111 and alower wall 112. Preferably, thecover 11 comprises afront wall 113 and arear wall 114. - The
cover 11 comprises, on itsupper wall 111, afirst opening 115. Thefirst opening 115 is configured to allow the escape of a sensor. Thecover 11 comprises, on itsupper wall 111, asecond opening 116. Thesecond opening 116 is configured to allow a sensor to come out. According to an embodiment, theupper wall 111 comprises a first portion and a second portion, positioned, along the vertical direction V, above the first portion. In other words, the upper wall is ridge shaped, in such a way as to have a raised zone, defining the second portion. Thefirst opening 115 and/or thesecond opening 116 are made on the second portion of the upper wall. - According to an embodiment, the
lower wall 111 is smooth. - According to an embodiment, the
front wall 113 includes a portion inclined relative to the vertical direction V. Preferably, thefront wall 113 also comprises a portion parallel to the vertical direction V, which joins theupper wall 111 to the inclined portion of thefront wall 113. It should be noted that, preferably, theupper wall 111 is in the advanced position, along the direction of forward movement A in the feed direction VA, relative to thelower wall 112. This determines a shape of thefront wall 113 of the vehicle which converges towards theupper wall 111. According to other embodiments, thelower wall 112 may be in an advanced position relative to theupper wall 111, along the direction of forward movement A in the feed direction VA. - According to a preferred embodiment, the
rear wall 114 is perpendicular to the vertical direction V. In other words, theupper wall 111 and thelower wall 112 interrupt at the same position along the direction of forward movement A (that is, they are vertically aligned V in the rear part). In other words, the rear part of thevehicle 1 is in the form of a truncated tail. According to an embodiment, thecover 11 comprises two side walls 117, 118. - Each side wall comprises a pair of curved grooves. Each pair of curved grooves is positioned above a corresponding pair of rolling elements of the
vehicle 1. - According to an embodiment, the supporting
structure 10 comprises a plurality oftubular elements 101. The supporting structure comprises a plurality ofnodes 102. - The plurality of
tubular elements 101 comprises a first group oftubular elements 101A, which is designed to constitute a base of the vehicle. Said tubular elements of the first group oftubular elements 101A are substantially parallel to a horizontal plane, perpendicular to the vertical direction V. - The plurality of
tubular elements 101 comprises a second group oftubular elements 101B, which is designed to form a skeleton extending up from the base of thevehicle 1. Said tubular elements of the second group oftubular elements 101B are perpendicular to the horizontal plane and/or inclined relative to the horizontal plane by an angle less than 90 degrees. Eachtubular element 101 of said plurality is connected to anothertubular element 101 of said plurality by means of arespective node 102 of said plurality. - Each
node 102 of said plurality comprises one or more of the following features: - a housing, to receive the
tubular element 101 inside, in such a way that the tubular element can rotate relative to its axis of symmetry but is constrained in the other directions and relative to the other rotations; according to other embodiments, the housing is configured for constraining thetubular element 101 also relative to the rotation about its axis of symmetry; - a hinged articulated coupling, which engages in a housing of the
node 102 and which is connected to a correspondingtubular element 101. The hinged articulated coupling allows thetubular element 101 connected to it to also rotate with respect to an axis perpendicular to the axis of symmetry of thetubular element 101. Said rotation enables the step of assembling the supportingstructure 10, but, after the assembly, by means of suitable lock pins, the articulated coupling is locked and thetubular element 101 can no longer rotate relative to thenode 102. - According to an embodiment, the supporting
structure 10 is a hyperstatic structure. - According to an embodiment, the supporting
structure 10 comprises a supportingframework 103, configured to support one or more sensors in a front zone of the vehicle 1 (that is, at thefirst end 1A of the vehicle). According to an embodiment, said supportingframework 103 comprises a plurality of rods connected to each other (in a removable or permanent fashion) to create a reticular structure. According to an embodiment, the cross-section of the plurality ofrods 103 is less than the cross-section of the plurality oftubular elements 101. - According to an embodiment, the supporting structure comprises a plurality of
coupling plates 104. Thecoupling plates 104 are connected to a correspondingtubular element 101 of said plurality, at an end of it facing towards the outside of the supportingstructure 10. More specifically, the coupling plates face towards the outside of the supportingstructure 10. Eachcoupling plate 104 is configured to be connected to a rolling element of thevehicle 1. Eachcoupling plate 104 is preferably provided with one or more holes, for connection to the corresponding rolling element by threaded and/or bolted connections. - According to an embodiment, each supporting
plate 104 is connected to the respectivetubular element 101 by means of a rubberised connection, that is to say, having a predetermined compliance. This allows the supportingplate 104 to transmit to the frame and dampen the stresses it receives from the corresponding rolling element. - Thus, the supporting
structure 10 includes a frame; the frame, according to an example embodiment, includes a reticular structure, which may be, for example, formed by thetubular elements 101. The frame defines an internal space; according to the example wherein the frame includes the reticular structure, the inner space has openings in communication with an environment outside the frame. - The
cover 11 is connected to the supportingstructure 10. According to an example, thecover 11 surrounds (entirely) the frame. According to an example, thecover 11 includes (consists of) a plate; the plate is made of a lightweight material and has a profile designed to reduce a coefficient of friction with the air. Preferably, thecover 11 is connected to the supportingstructure 10 in a removable fashion, to facilitate access to the space inside the frame. - According to an example embodiment, each wheel of the vehicle is connected to the supporting
structure 10 independently from the other wheels. - The
vehicle 1 comprises aninspection system 2. Theinspection system 2 is configured for detectinginspection data 201. The inspection data represent the presence or absence of objects along the stretch of railway line. - The
vehicle 1 comprises acontrol unit 3, configured to control thevehicle 1. - The inspection system is configured for sending the
inspection data 201 to thecontrol unit 3. - According to an embodiment, the
inspection system 2 comprises afirst Lidar unit 21. According to an embodiment, theinspection system 2 comprises asecond Lidar unit 22. - According to an embodiment, the
inspection system 2 comprises athird Lidar unit 23. - The Lidar units operate by measuring the flight time of a light beam which is made to rotate about an axis (optical beam). There are two geometrical types of Lidar unit, the single beam types (one single plane) and the multiple beam types (more planes exiting from the same point). There are also two methods for controlling the beams: with motor-driven mirror and electronic control.
- According to an embodiment, the
first Lidar unit 21 is configured for performing a scanning of the environment located in front of thevehicle 1, on a first plane, parallel to the horizontal plane. - According to an embodiment, the second and/or the
third Lidar unit vehicle 1, on a second plane, substantially vertical. - According to an embodiment, the second and/or the
third Lidar unit - According to an embodiment, the
first Lidar unit 21 is connected to the supportingframework 103. According to an embodiment, the second and/or thethird Lidar unit tubular element 101 of said plurality. - According to an embodiment, said first, second and/or
third Lidar unit vehicle 1. More specifically, theLidar units vehicle 1 and with changes in a beam. For example, the readings available could be: - Acquisition time in nanoseconds;
- Measurement ID
- Encoder measurement
- Block of data with: distance, reflectivity, number of photons read, noise photons.
- According to an embodiment, the inspection system comprises one or
more video cameras 24. Said one ormore video cameras 24 face towards the moving away direction VA in a direction having at least one component in the direction of forward movement A. - Said one or
more video cameras 24 are configured for detecting image data 241, representing an RGB image of the environment encountered by thevehicle 1 in the stretch of railway line. - According to an embodiment, said one or
more video cameras 24 are in a stereo configuration, in such a way as to represent a three-dimensional image of the objects encountered in the stretch of railway line. - In particular, in the context of video cameras in a stereo configuration, the filming on the optical planes of one or more objects present in the scene allows vision algorithms to perform an approximate reconstruction of the three-dimensional position of the objects, and to use this reconstruction to determine the position of the objects with regard to the limit shape.
- The reconstruction of the three-dimensional geometry is generally performed by using in sequence two algorithms of a different type: firstly, the correspondence between the points of one image and those of another is identified, so for each correspondence a triangulation is performed which allows, on the basis of the known information (image points and position/orientation of the chambers) the three-dimensional positions of each correspondence to be reconstructed.
- According to an embodiment, said first, second and/or
third Lidar unit more video cameras 24 are configured to send to the control unit the obstacle data 211 and the image data 241 to thecontrol unit 3, respectively. - According to an embodiment, the
inspection system 2 comprises an illuminator (one or more illuminators) 25. Saidilluminator 25 is configured to illuminate a front zone of thevehicle 1 to allow said one ormore video cameras 24 to detect the image data 241 even under poor natural light conditions. - The
vehicle 1 comprises apower supply system 4. Thepower supply system 4 is configured for powering thecontrol unit 3 and the other electronic components of thevehicle 1. Thepower supply system 4 comprises a battery pack 41. Said battery pack rests on thelower wall 112, at the level of the base of the supportingstructure 10. Thepower supply system 4 is connected to thecontrol unit 3 for powering it and for sendingautonomous data 401, representing an energy autonomy of thepower supply system 4. - According to an embodiment, the
vehicle 1 comprises acommunication module 5. Thecommunication module 5 is configured to allow a remote connection with remote terminals. More specifically, thecommunication module 5 allows the exchange of signals with remote terminals. - According to an embodiment, the
communication module 5 comprises one or more of the following features: - an
LTE 51 module for the interconnection of wideband network; - a GSM-
R module 52 for the interconnection with a service network in situations without an LTE connection. - a Wi-
Fi transceiver 53. - According to an embodiment, the
vehicle 1 comprises alocalisation sensor 6, configured for detectingposition data 601, representing a geographical position of thevehicle 1, preferably in real time. According to an embodiment, thelocalisation sensor 6 is a GPS sensor. - The localisation sensor is configured to send the
position data 601 to thecontrol unit 3. - According to an embodiment, the
vehicle 1 comprises an alarm system 7. The alarm system 7 comprises anacoustic indicator 71. The alarm system 7 comprises aluminous indicator 72, if necessary intermittent. According to an embodiment, the alarm system is configured for receivingcontrol signals 301 from thecontrol unit 3. - According to an embodiment, the vehicle comprises a
local user interface 8, by means of which a user can enter or send signals to thecontrol unit 3. According to an embodiment, thelocal user interface 8 comprises a main ON/OFF pushbutton 81. Thecontrol unit 3 is programmed to switch off the electricity supply of thevehicle 1 in response to the selection of the main ON/OFF button 81. - According to an embodiment, the
control unit 3 comprises afirst card 31 and asecond card 32. Thefirst card 31 is designed for controlling the drive, thelocalisation sensor 6, thecommunication module 5 and the alarm system 7. According to an embodiment, thesecond card 32 is designed for controlling theinspection system 2, in particular the first and thesecond Lidar unit control unit 3 comprises athird card 33. Moreover, according to an embodiment, thecontrol unit 3 comprises a dedicated memory for each of said second andthird cards - According to this embodiment, the
second card 32 is designed for controlling and managing thefirst Lidar unit 21 whilst thethird card 33 is designed for controlling and managing thesecond Lidar unit 22. The second and thethird card first card 31 by an Ethernet cable. - According to an embodiment, the vehicle comprises a drive unit, designed for moving the
vehicle 1. - The drive unit comprises a plurality of wheels (rolling elements) 9. More specifically, according to the preferred embodiment, the vehicle comprises four
wheels 9. - The drive unit comprises, for each wheel, one or more of the following components:
- an
electric motor 91, connected to thepower supply system 4 for receiving electricity; - an electric
current sensor 92 configured to detectintensity data 921, representing the value of electric current with which the electric motor is powered; - a
position sensor 93, for example an encoder, configured for detectingdynamic data 931, representing the position of the wheel relative to the supportingstructure 10, that is, representing the distance travelled by thevehicle 1; - a
driver 94, configured to manage the electricity supply to theelectric motor 91 on the basis ofcontrol signals 301 sent by thecontrol unit 3. - According to an embodiment, each
driver 94 is connected to thecontrol unit 3, preferably to thefirst card 31 of thecontrol unit 3. According to an embodiment, eachdriver 94 is connected to thepower supply system 4 for receiving a supply of the electrical current. - According to an embodiment, the
user interface 8 comprises a drive ON/OFF pushbutton. Thecontrol unit 3 is programmed to switch off the power supply to thedriver 94 in response to the selection of the drive ON/OFF button. - According to an embodiment, the
local user interface 8 is positioned on thecover 11, in a front or rear zone of thevehicle 1. - According to an embodiment, each
electric motor 91 comprises arotor 911 and astator 912. - According to an embodiment, the
wheel 9 comprises a supportingplate 95. The supportingplate 95 comprises a first plurality of connectingholes 951. The supportingplate 95 is connected to thecoupling plate 104 of the supportingstructure 104. More specifically, said first plurality of connectingholes 951 of the supportingplate 95 receive one or more connection bolts which pass through thecoupling plate 104. - The connecting
holes 951 of the supportingplate 95 are angularly spaced by ninety degrees from each other. - According to an embodiment, the supporting
plate 95 comprises a second plurality of connectingholes 952. The second plurality of connectingholes 952 is configured to allow a connection between the supportingplate 95 and thestator 912 of theelectric motor 91. - More specifically, the
stator 912 comprises aconnection ring 9121, including a plurality of pins, rising from the connectingring 9121 along a direction parallel to the axis of rotation R of thewheel 9 and which can be screwed to fasten to the connectingring 9121. - Said plurality of pins of the connecting
ring 9121 inserts into the second plurality of connectingholes 952 of the supportingplate 95. - The
wheel 9 comprises adrive shaft 96, configured to rotate about an axis of rotation R of thewheel 9. - The
wheel 9 comprises a disc-shapedbody 97. The disc-shaped body comprises anouter crown 971. The outer crown has an extension along the axis of rotation R. The diameter of theouter crown 971 along the axis of rotation R is variable. The disc-shapedbody 97 comprises a plurality ofspokes 972. The disc-shapedbody 97 comprises a connectinghub 973. - The plurality of
spokes 972 is connected to an inner surface SI of theouter crown 971. The plurality ofspokes 972 is connected to an outer surface of the connectinghub 973. The thickness of the plurality ofspokes 972 along the axis of rotation R is less than the thickness along the axis of rotation R of theouter crown 971. - The
rotor 911 of theelectric motor 91 is concentric and coaxial with thestator 912. Moreover, therotor 911 has a smaller diameter than thestator 912. Thestator 912 surrounds therotor 911. - According to an embodiment, the
drive shaft 96 is rotated with therotor 911 of theelectric motor 91. In particular, according to an embodiment, thedrive shaft 96 is rotationally constrained to therotor 911 of theelectric motor 91 by a first key CH1. - According to an embodiment, the
drive shaft 96 is constrained to the rotation with the disc-shapedbody 97. In particular, according to an embodiment, thedrive shaft 96 is constrained to the rotation with the disc-shapedbody 97 by a second key CH2. - According to an embodiment, the
drive shaft 96 is inserted inside a hub of the supportingplate 95. More specifically, thedrive shaft 96 is supported by the supportingplate 95. Thedrive shaft 96 rests on the hub of the supportingplate 95 by means of one or more rolling bearings CS. According to an embodiment, theposition sensor 93 comprises afixed part 932, which is connected to the supportingplate 95, and amovable part 933, which is constrained and therefore rotatable with the disc-shapedbody 97. - According to an embodiment, the
outer crown 971 comprises a side wall 971'. The side wall 971' comprises an inner surface SI, connected to the plurality ofspokes 972. The side wall 971' comprises an outer surface SE. - The outer surface CT is shaped to form a first portion P1, substantially parallel to the axis of rotation R, and a second portion P2, inclined relative to the axis of rotation R and, preferably, converging with the axis of rotation in a direction coming out of the
vehicle 1. - The second portion P2 has a curved profile, in particular with a double curve, having opposite curvature (for example S-shaped).
- The first and second portions P1, P2 are joined to each other by means of a step G. The second portion P2 is positioned, radially, further from the axis of rotation R relative to the first portion P1.
- According to an embodiment, the
wheel 9 comprises awear element 98. Thewear element 98 is superposed on the first portion P1 of the outer surface of the side wall 971'. - The
wear element 98 extends along the axis of rotation R from afirst end 98A, in contact with the step G and connected to the second portion P2 of the outer surface of the side wall 971', and asecond end 98B, opposite thefirst end 98A. - The
wear element 98 has a radial thickness variable along the axis of rotation R, which, preferably, but not necessarily, decreases in a direction coming out of thevehicle 1. According to other embodiments, thewear element 98 has a constant radial thickness along the axis of rotation R. The maximum radial thickness is defined, according to an embodiment, by the radial height of the step G, in such a way that the wear element defines a continuous surface with the second portion P2 of the outer surface SE of the side wall 971'. - According to an embodiment, the surface of the
wear element 98 facing in the opposite direction to the axis of rotation R defines a first contact surface SC1. Said first contact surface SC1 is designed to roll on a rolling portion of the rails, which is substantially parallel to the horizontal plane. According to an embodiment, the second portion P2 defines a second contact surface SC2. The second contact surface SC2 is designed to make contact with a contact surface of the track which is oriented substantially vertically (perpendicular to the rolling portion of the track). According to an embodiment, the second portion P2 defines a third contact surface SC3. The third contact surface SC3 faces in a direction substantially opposite the second contact surface SC2. The third contact surface SC3 is configured to make contact with a railway counter-track, in the context of railway points sets, wherein the vehicle must continue on a predetermined branch. This avoids the rolling element opposite the rolling element which comes into contact with the counter-track from colliding (jamming) with a frog of the points set. The term "counter-track" and "frog", in the context of a railway points set, is a known and common term for an expert in the trade. - According to an embodiment, the side wall 971' comprises a ridge, the two sides of which are defined by the second contact surface SC2 and by the third contact surface SC3. According to an embodiment, said ridge is full, and its inside diameter corresponds, basically, to the internal diameter of the first portion, to form a single wall.
- On the other hand, according to an embodiment, which further contributes to reducing the weight of the
vehicle 1, the ridge is substantially hollow and an insert I, made preferably of plastic material, is housed inside it. According to an embodiment, the wear element is made of plastic material, preferably polyurethane. However, materials are used with a high coefficient of resistance to wear and which have a reduced weight. According to an embodiment, the disc-shaped body 97 (in general the components of the wheel) is made of aluminium. - According to an embodiment, the
control unit 3 is configured to receive one or more of the following input data: - image data 241;
- presence data 211;
-
autonomy data 401; -
position data 601; -
intensity data 921; -
dynamic data 931. - According to an embodiment, the
control unit 3 is programmed for generatingcontrol signals 301, on the basis of one or more groups of data in the context of the input data. - According to an embodiment, the
control unit 3 comprises a memory (reading and writing). The memory contains reference values for one or more control parameters. Preferably, thecontrol unit 3 is programmed for controlling the actuation unit on the basis of said reference values. - Said one or more control parameters represent one or more of the following parameters:
- cruising speed;
- maximum speed;
- distance in kilometres;
- maximum distance in kilometres;
- geographical starting position;
- geographical arrival position;
- interruption of the journey, or not, if there is an object which prevents the vehicle from moving forward;
- number and type of sensors active between said one or more sensors;
- stretch data, representing the railway route to be travelled along and inspected;
- detection distance of said one or more sensors.
- According to an embodiment, this invention provides a
system 1000 for inspecting a stretch of railway line. Thesystem 1000 comprises thevehicle 1 according to one or more of the features of the invention. - Moreover, the
system 1000 comprises aprocessing unit 1001. Theprocessing unit 1001 is located in a stationary position. Preferably, the position of theprocessing unit 1001 is remote relative to the vehicle. According to an embodiment, the processing unit is equipped with a user interface (remote) 1002, to allow a user to entercontrol data 1003. - According to an embodiment, the
processing unit 1001 is programmed to receive theinspection data 201 from thevehicle 1. According to an embodiment, theprocessing unit 1001 is programmed to send the control data to the vehicle. Thecontrol data 1003, according to an embodiment, represents the values of the control parameters saved in the memory of thecontrol unit 3. This makes it possible to suitably program thevehicle 1 remotely before the vehicle starts the actual inspection of the stretch of railway line. Thecontrol data 1003 is sent by means of the communication module, for example by means of Wi-Fi, LTE or GSMR connection. According to an embodiment, the communication module sends, preferably in real time, information on the vehicle during its travel. Said information is, for example, the status of the sensors, the speed of travel of the vehicle, the geographical position of the vehicle, the distance travelled by the vehicle and/or the video streaming on the stretch of line travelled along. - According to an embodiment of processing, the
remote processing unit 1001 may be a personal computer, a tablet and/or a smartphone. According to an embodiment, the system comprises a plurality of processing units (remote) 1001, each connected with thevehicle 1 and able to send thecontrol data 1003 to thevehicle 1. This allows a control redundancy on thevehicle 1. - However, this solution poses the problem of controlling the accesses and the authorisations. For this reason, in order to prevent overlapping of the control, the
control unit 3 is configured for receiving thecontrol data 1003 from asingle processing unit 1001 at a time. Moreover, if aprocessing unit 1001 wishes to sendcontrol data 1003 whilst anotherprocessing unit 1001 has the control, thecontrol unit 3 is programmed to send an authorisation message to theprocessing unit 1001 which has the control, to allow the current controller to pass the control of the vehicle to anotherprocessing unit 1001. - The
remote user interface 1002, according to an embodiment, comprises a replication (redundancy) of the main ON/OFF pushbutton 81 and the drive ON/OFF pushbutton. - According to an embodiment, the user interface allows the display of the vehicle data in real time.
- According to an embodiment, the
control unit 3 is programmed to control the electricity supply to theelectric motors 91, on the basis of theposition data 601, thedynamic data 931 and the control data (that is, the values of the control parameters) and/or on the basis of the stretch data. - More specifically, the
control unit 3 is programmed to determine a speed of forward movement of thevehicle 1 on the basis of theposition data 601 and/ordynamic data 931. Thecontrol unit 3 is programmed to compare the value of the speed of forward movement with the maximum cruising speed value between the reference values. Thecontrol unit 3 is programmed to vary the electrical power supply parameters of the motors for reducing a difference between the speed of forward movement and the maximum cruising speed. - The
control unit 3 is programmed to detect a position of thevehicle 1 along the stretch of railway line on the basis of theposition data 601 ordynamic data 931. According to an embodiment, thecontrol unit 3 is programmed for evaluating the presence of slowing down conditions along the stretch on the basis of the stretch data. In other words, thecontrol unit 3 is programmed to recognise in advance the approach towards bends and/or tunnels. - The
control unit 3 is programmed to vary the electrical power supply parameters of the motors to slow down the speed of forward movement of the vehicle at bends and/or tunnels. - According to an embodiment, the
control unit 3 is programmed to identify one or more slowing down conditions. Thecontrol unit 3 is programmed to slow down the speed for forward movement if at least one of said one or more slowing down conditions occurs. - According to an embodiment, the
control unit 3 is programmed to slow down the speed of forward movement of thevehicle 1 in a manner proportional to a distance of thevehicle 1 from a obstacle in front, detected on the basis of theinspection data 201. According to an embodiment, said slowing down of thevehicle 1 ends with the stopping, to prevent the collision with the lateral obstacle. - The
vehicle 1 comprises an accelerometer (IMU sensor), programmed to detect vibration data, representing a vibration of thevehicle 1. - Said one or more slowing down conditions include one or more of the following conditions:
- identifying, on the basis of
inspection data 201, the presence of lateral masonry works (for example, tunnels) continuously and close to the limits of PMO; - identifying, on the basis of
inspection data 201, the presence of front masonry works at distances close to the space for stopping the device (for example, bends and obstacles in the front direction); - identifying, based on
dynamic data 931, the presence of high lateral accelerations and/or high angular speeds; - identifying, based on vibration data, the presence of high vibrations;
- identifying, on the basis of
dynamic data 931, the presence of an significant difference between an average speed of rotation of the wheels of thevehicle 1; - distance from the geographical destination point below a limit value, on the basis of
position data 601 and/ordynamic data 931; - loss of connection of the communication module;
- loss of the connection of the communication module for a longer time than a limit time interval;
- moving away from the geographical destination position by a value greater than a limit value.
- According to an embodiment, the
control unit 3 is programmed, in the absence of slowing down conditions, to control the drive unit of the vehicle to perform the inspection according to a speed of forward movement profile including a first acceleration step up to the maximum cruising speed, a second step of advancing at a constant speed and a third slowing down step until stopping at the geographical arrival position. According to an embodiment, thecontrol unit 3 is programmed to identify one or more stopping conditions. Thecontrol unit 3 is programmed to stop thevehicle 1 if at least one of said one or more stop conditions occurs. Said one or more stop conditions include one or more of the following conditions: - real-time position of the
vehicle 1, determined on the basis ofposition data 601, far from the geographical arrival position by a value less than an permissible threshold; this condition allows thevehicle 1 to be stopped when it is close to the geographical destination position; - ratio between the real time distance of the
vehicle 1 from the geographical destination position and the minimum distance (during travel along the stretch) of thevehicle 1 from the geographical destination position less than a predetermined value; this condition makes it possible to stop thevehicle 1 if the latter does not move below the permissible threshold and then continue to move away; - autonomy of the
vehicle 1, determined on the basis ofautonomy data 401, less than a value of autonomy necessary to reach the geographical destination position; this condition prevents the vehicle from remaining without power supply since the previous condition might not occur if thevehicle 1 rotates about the geographical destination position, without varying its distance from the latter; - distance travelled by the
vehicle 1, determined on the basis ofposition data 601 and/or on the basis ofdynamic data 931, greater than the maximum distance value which may be travelled; - a voltage for powering the motors which is anomalous and less than a nominal value; for example, the cases can be excessive electricity consumption (e.g. lighting), battery at the start not completely charged, routes with high friction; for this reason, it is useful for the control unit to stop the vehicle before it switches off due to insufficient power supply;
- generic alarms relating to malfunctions of the drive unit, of the
communication module 5, of thepower supply system 4, of theinspection system 2; - identifying, based on
inspection data 201, obstacles to the front and sides; more specifically, thecontrol unit 3 is programmed to slow down thevehicle 1 in the presence of obstacles in front and/or materials for ending with the stopping of thevehicle 1 before reaching the obstacle. Thecontrol unit 3 is programmed to keep thevehicle 1 stationary until the obstacle is removed. If the obstacle is not removed, for example in the presence of a permanent obstruction, thecontrol unit 3 is programmed to require manual recovery of thevehicle 1. - travel time, that is to say, the time in which the
vehicle 1 is moving, greater than a limit time interval. - According to an embodiment, the
remote user interface 1002 comprises one or more of the following features: - a general status panel, designed for mission monitoring and for controlling the movement of the
vehicle 1, which provides one or more of the following items of information: real-time position of thevehicle 1; inspection speed profile; real-time forward movement speed; distance travelled updated in real time; number of obstacles found and voltage ofpower supply system 4; percentage of completion of the inspection and distance from geographical destination position and/or reaching at least one current stopping condition; time and date of last data receiving; current network configurations; - a panel for configuring the mission profile, dedicated to selecting the cruising speed, the geographical destination position and the maximum distance which can be travelled;
- a dedicated LOG panel to monitor all the signals inside the
system 1001; - a manual interaction panel for checking the inspection of the
vehicle 1, in which the following operations can be performed: speed control; position control (at regular intervals); setpoint change (speed and position); stop command; control for storing a photo and/or a measurement; commands (where possible) for rotating said one ormore video cameras 24; - a panel for configuring and diagnostics;
- a panel for loading and downloading the data, preferably
inspection data 201.
Claims (15)
- A vehicle (1) for inspecting a railway line, comprising:- a supporting structure (10);- a cover (11), associated with the supporting structure (10);- a plurality of rolling elements (9), connected to the supporting structure (10) and configured to come into contact with the tracks of the railway line, so as to allow the vehicle to move on the tracks, along a stretch of the railway line;- an inspection system (2), including one or more sensors (21, 22, 23, 24) and configured to detect inspection data (201) relative to the stretch of the railway line travelled by the vehicle (1);- an actuating unit (91), associated with said plurality of rolling elements (9) for transmitting a drive torque;- a control unit (3), connected to the inspection system (2) for receiving the inspection data (201) and programmed to process the inspection data (201), to derive information regarding the presence of obstacles to railway traffic along said stretch of railway line,wherein the control unit (3) is programmed to control the actuating unit (91) in response to the inspection data (201).
- The vehicle (1) according to claim 1, comprising an electricity accumulator (4), wherein the actuating unit (91) comprises a plurality of electric motors (91), each electric motor (91) of said plurality being associated with a corresponding rolling element (9) of said plurality of rolling elements.
- The vehicle (1) according to claim 2, comprising, for each rolling element (9) of said plurality, a corresponding movement sensor (93), configured to determine movement data (931) representing an angular speed of the corresponding rolling element (9), wherein the control unit (3) is configured to control the actuation unit (91) in response to the movement data (931).
- The vehicle (1) according to any one of the preceding claims, wherein the cover (11) surrounds, at least partly, one or more of the rolling elements (9) of the plurality of rolling elements.
- The vehicle (1) according to any one of the preceding claims, wherein the vehicle extends along a longitudinal axis (A) from a first end (1A) to a second end (1B) according to a direction of movement (VA), and wherein the cover (11) extends longitudinally between a first longitudinal end and a second longitudinal end, the cover (11) including a lower wall (112), facing towards the ground, and an upper wall (111), opposite the lower wall (112), wherein the upper wall (111) is in a forward position relative to the lower wall (112) along the longitudinal axis (A) in the direction of movement (VA).
- The vehicle (1) according to claim 5, wherein the cover (11) includes a rear wall (114), which connects the upper wall (111) to the lower wall (112), and wherein the rear wall (114) is perpendicular to the longitudinal axis (A).
- The vehicle (1) according to claim 5 or 6, wherein the lower wall (112) is smooth.
- The vehicle (1) according to any one of the preceding claims, wherein the supporting structure (10) is a reticular structure, including a plurality of tubular elements (101) and a plurality of nodes (102), each node (102) being configured for connecting two or more tubular elements (101).
- The vehicle (1) according to claim 8, wherein the supporting structure (10) is a hyperstatic structure and comprises a plurality of couplings, each coupling including a hinge and being housed in a corresponding housing of a node (102) and connected to a tubular element (101) of said plurality.
- The vehicle (1) according to any one of the preceding claims, wherein each rolling element (9) of said plurality comprises a first portion (97), made of aluminium, and a second portion (98), made of plastic material and configured to enter into contact with the track of the railway line, and wherein the supporting structure (10) is made of carbon.
- The vehicle (1) according to any one of the preceding claims, comprising a differential, configured for adjusting the rotation of each rolling element (9) of said plurality of rolling elements.
- The vehicle (1) according to any one of the preceding claims, wherein the control unit (3) includes a read and write memory containing reference values for one or more control parameters, the control unit (3) being programmed to control the actuating unit (91) on the basis of said reference values, wherein the one or more control parameters are selected from the following list:- cruising speed;- maximum speed;- distance in kilometres;- maximum distance in kilometres;- geographical starting position;- geographical arrival position;- interruption of the journey, or not, if there is an object which prevents the vehicle from moving forward;- number and type of sensors active between said one or more sensors;- detection distance of said one or more sensors.
- The vehicle (1) according to any one of the preceding claims, wherein the inspection system (2) includes a video camera and an illuminator, so that the inspection data include image data, and wherein the control unit is programmed to process the image data, to recognise objects present along said stretch of railway line.
- A system (1000) for inspecting a railway line, comprising:- a vehicle (1) according to any one of the preceding claims;- a processing unit (1001), located in a stationary position, remote from the vehicle (1), and equipped with a user interface (1002), to allow a user to enter control data (1003),wherein the processing unit (1001) is programmed for receiving the inspection data (201) from the vehicle (1) and for sending to the vehicle (1) the control data (1003).
- A method for inspecting a stretch of railway line, comprising the following steps:- preparing a self-propelled vehicle (1), the vehicle (1) being configured to move on the tracks of the railway line by means of an actuating unit (91) included in the vehicle (1), and being equipped with sensors (2) for detecting inspection data (201) indicating any obstacles to the railway traffic;- moving the vehicle (1) along the stretch of railway line to be inspected and detecting inspection data (201) relating to said stretch of line;- processing inspection data (201) and generating information regarding the presence of obstacles to railway traffic along the stretch of railway line inspected.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| IT202000031499 | 2020-12-18 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP4015342A1 true EP4015342A1 (en) | 2022-06-22 |
| EP4015342C0 EP4015342C0 (en) | 2025-01-29 |
| EP4015342B1 EP4015342B1 (en) | 2025-01-29 |
Family
ID=74858638
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP21214075.0A Active EP4015342B1 (en) | 2020-12-18 | 2021-12-13 | Vehicle and method for inspecting a railway line |
Country Status (1)
| Country | Link |
|---|---|
| EP (1) | EP4015342B1 (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115214728A (en) * | 2022-07-15 | 2022-10-21 | 北京交通大学 | Intelligent stabilizing vehicle for detecting quality state of ballast track after tamping stabilizing operation |
| KR102796093B1 (en) * | 2024-10-25 | 2025-04-18 | 한국철도기술연구원 | Field inspection apparatus of track equipment based on 3d image, and method for the same |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5429329A (en) | 1994-01-31 | 1995-07-04 | Wallace; Charles C. | Robotic railroad accident prevention vehicle and associated system elements |
| US5786750A (en) | 1996-05-10 | 1998-07-28 | The United States Of America As Represented By The Secretary Of The Navy | Pilot vehicle which is useful for monitoring hazardous conditions on railroad tracks |
| US20160368510A1 (en) | 2015-06-16 | 2016-12-22 | The Johns Hopkins University | Instrumented rail system |
| US20190256113A1 (en) | 2018-02-19 | 2019-08-22 | Claudio Filippone | Autonomous scouting rail vehicle |
| DE102018119151A1 (en) | 2018-08-07 | 2020-02-13 | Bombardier Transportation Gmbh | RAIL VEHICLE SYSTEM AND METHOD FOR IMPROVING THE SAFETY OF A RAIL VEHICLE |
| ES2691145B2 (en) | 2017-05-23 | 2020-04-08 | Univ Madrid Carlos Iii | Unmanned railway vehicle, system and procedure for the inspection of railway infrastructure and superstructure. |
| IT201800009264A1 (en) | 2018-10-09 | 2020-04-09 | Maurizio Poggio | SAFETY SYSTEM FOR A RAILWAY LINE, AND RELATED PROCESS. |
-
2021
- 2021-12-13 EP EP21214075.0A patent/EP4015342B1/en active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5429329A (en) | 1994-01-31 | 1995-07-04 | Wallace; Charles C. | Robotic railroad accident prevention vehicle and associated system elements |
| US5786750A (en) | 1996-05-10 | 1998-07-28 | The United States Of America As Represented By The Secretary Of The Navy | Pilot vehicle which is useful for monitoring hazardous conditions on railroad tracks |
| US20160368510A1 (en) | 2015-06-16 | 2016-12-22 | The Johns Hopkins University | Instrumented rail system |
| ES2691145B2 (en) | 2017-05-23 | 2020-04-08 | Univ Madrid Carlos Iii | Unmanned railway vehicle, system and procedure for the inspection of railway infrastructure and superstructure. |
| US20190256113A1 (en) | 2018-02-19 | 2019-08-22 | Claudio Filippone | Autonomous scouting rail vehicle |
| DE102018119151A1 (en) | 2018-08-07 | 2020-02-13 | Bombardier Transportation Gmbh | RAIL VEHICLE SYSTEM AND METHOD FOR IMPROVING THE SAFETY OF A RAIL VEHICLE |
| IT201800009264A1 (en) | 2018-10-09 | 2020-04-09 | Maurizio Poggio | SAFETY SYSTEM FOR A RAILWAY LINE, AND RELATED PROCESS. |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115214728A (en) * | 2022-07-15 | 2022-10-21 | 北京交通大学 | Intelligent stabilizing vehicle for detecting quality state of ballast track after tamping stabilizing operation |
| CN115214728B (en) * | 2022-07-15 | 2024-05-10 | 北京交通大学 | An intelligent stabilization vehicle for detecting the quality status of ballasted track after tamping stabilization operation |
| KR102796093B1 (en) * | 2024-10-25 | 2025-04-18 | 한국철도기술연구원 | Field inspection apparatus of track equipment based on 3d image, and method for the same |
Also Published As
| Publication number | Publication date |
|---|---|
| EP4015342C0 (en) | 2025-01-29 |
| EP4015342B1 (en) | 2025-01-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP4015342B1 (en) | Vehicle and method for inspecting a railway line | |
| US10029708B2 (en) | Autonomous railroad monitoring and inspection device | |
| CN113825699B (en) | Autonomous drone diagnostics | |
| CN106143530B (en) | Routing inspection trolley for suspension type monorail traffic system box track girder | |
| US10597054B2 (en) | Real-time drone infrared inspection of moving train | |
| CN105158337B (en) | Based on the storage tank bottom plate weld seam automatic tester being wirelessly transferred | |
| US10596705B2 (en) | Mobile robot with collision anticipation | |
| CN102317041A (en) | Route inspecting robot and system | |
| JP2021149968A (en) | Method and system for automatic driving of vehicle | |
| CN104302530A (en) | System and method for inspecting a route during movement of a vehicle system over the route | |
| KR102359154B1 (en) | Autonomous robot for diagnosing an electric power facilities | |
| CN205930728U (en) | A patrol and examine dolly that is used for suspension type mono -rail transport system box track roof beam | |
| EP3833590A1 (en) | Railway vehicle system and method for improving the safety of a railway vehicle | |
| US20190061462A1 (en) | Electric Vehicle Resilient Thermal Management for Cooling System During Fail Operational | |
| CN108100079A (en) | Novel all-wheel walking and anti-collision system | |
| CN113548087A (en) | Vehicle-mounted ATP subsystem, train departure combined control system and method | |
| CN112977471A (en) | Automatic parking system | |
| EP4015235B1 (en) | Wheel of a vehicle for inspecting a railway line | |
| AU2004305163B2 (en) | Rail-guided transport system | |
| WO2020030510A1 (en) | Railway drone vehicle and railway vehicle system | |
| EP4015337A1 (en) | Vehicle and method for inspecting a railway line | |
| KR102080051B1 (en) | safety vehicle system for urban-rail using autonomous driving vehicle | |
| JP2019082377A (en) | Road surface state detection device, and road surface state detection system | |
| Kwasniowski et al. | Telematic problems of unmanned vehicles positioning at container terminals and warehouses | |
| CN107816290B (en) | Automatic door control method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20221220 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| RIN1 | Information on inventor provided before grant (corrected) |
Inventor name: SATLER, MASSIMO Inventor name: LEONARDIS, DANIELE Inventor name: TISENI, LUCA Inventor name: SOLAZZI, MASSIMILIANO Inventor name: GASPARINI, RICCARDO Inventor name: FRISOLI, ANTONIO Inventor name: LABANCA, GIACOMO Inventor name: GONNELLI, MIRCO Inventor name: ERMINI, MIRKO Inventor name: FEDELI, EUGENIO Inventor name: CUCCHIARA, RITA Inventor name: CALDERARA, SIMONE Inventor name: BORGHI, GUIDO Inventor name: AVIZZANO, CARLO ALBERTO |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20240808 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602021025344 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| U01 | Request for unitary effect filed |
Effective date: 20250226 |
|
| U07 | Unitary effect registered |
Designated state(s): AT BE BG DE DK EE FI FR IT LT LU LV MT NL PT RO SE SI Effective date: 20250304 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250429 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250129 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250129 |