EP3663250A1 - A system and method for alignment of a terminal truck relative to a crane - Google Patents
A system and method for alignment of a terminal truck relative to a crane Download PDFInfo
- Publication number
- EP3663250A1 EP3663250A1 EP18209868.1A EP18209868A EP3663250A1 EP 3663250 A1 EP3663250 A1 EP 3663250A1 EP 18209868 A EP18209868 A EP 18209868A EP 3663250 A1 EP3663250 A1 EP 3663250A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- container
- crane
- tractor
- terminal
- distance
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims description 14
- 238000005516 engineering process Methods 0.000 claims abstract description 46
- 238000005259 measurement Methods 0.000 claims abstract description 19
- 238000002604 ultrasonography Methods 0.000 claims description 21
- 238000001514 detection method Methods 0.000 claims description 4
- 238000003860 storage Methods 0.000 description 12
- 238000006073 displacement reaction Methods 0.000 description 7
- 238000012546 transfer Methods 0.000 description 6
- 238000004891 communication Methods 0.000 description 4
- 230000007246 mechanism Effects 0.000 description 4
- 238000012545 processing Methods 0.000 description 4
- 238000012423 maintenance Methods 0.000 description 3
- 230000006870 function Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 230000011664 signaling Effects 0.000 description 2
- 230000003068 static effect Effects 0.000 description 2
- 230000008901 benefit Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 230000015556 catabolic process Effects 0.000 description 1
- 239000004020 conductor Substances 0.000 description 1
- 230000001955 cumulated effect Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 230000002708 enhancing effect Effects 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 238000013519 translation Methods 0.000 description 1
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C13/00—Other constructional features or details
- B66C13/18—Control systems or devices
- B66C13/46—Position indicators for suspended loads or for crane elements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C19/00—Cranes comprising trolleys or crabs running on fixed or movable bridges or gantries
- B66C19/002—Container cranes
Definitions
- the present invention generally relates to moving a container from a terminal truck using a gantry crane, for example loading a container or several containers from a terminal truck onto a ship using a ship-to-shore crane that is located on the quay along a dock in a harbour.
- the gantry crane has a spreader to pick-up the container from the terminal truck's trailer and drop the container on the ship, and the gantry crane typically is positioned on rails such that it can move substantially parallel to the quay border.
- alignment of the terminal truck carrying a container to be loaded onto the ship relative to the crane is important to avoid that any crane displacement is needed in order to move a container from the trailer or chassis of the terminal truck onto the ship. More precisely, alignment of the container residing on the trailer of the terminal truck relative to the crane's spreader must be accomplished with a typical alignment accuracy of 10 centimetres or less. Otherwise, displacement of the gantry crane along the rail is needed before the spreader can pick-up the container from the trailer. Such crane displacements along the rail in order to align the spreader of the crane with the containers to be picked-up are time consuming and consequently significantly reduce the container terminal efficiency expressed as an amount of containers that is loaded onto the ship per time unit.
- the system of WO 2018/087141 A1 fails to accurately determine the position of the container to be moved from the truck trailer onto the ship. Nevertheless, rather the position of the container is important instead of the position of the truck cabin.
- the position of the container can vary for various reasons: the chassis or trailer of a terminal truck typically has no pins as a result of which the container has no predetermined, fixed position relative to the terminal truck cabin, the size of the container can vary (for example 20 ft, 40 ft, 45 ft, ...), multiple containers may reside on a single trailer (for example the same trailer may be used to carry two 20 ft containers or a single 40 ft container), etc.
- US patent application US 2013/0147640 A1 entitled “Container Handler Alignment System and Method” describes a system with laser scanners in fixed positions on the crane's sill beam to determine the type, position and orientation of a vehicle, and a processor that generates driving instructions for the vehicle driver.
- the system known from US 2013/0147640 A1 allegedly outperforms other laser-based systems in that a reduced number of lasers is used therein, i.e. a first laser to detect presence, location and orientation of any vehicle and a second laser to determine presence, location and orientation of containers loaded on the vehicle.
- Direction indicators attached to the sill beams indicate to the vehicle drivers whether their vehicle is properly positioned, needs to be moved backward or forward, and whether their vehicle orientation is skewed.
- Laser based systems like LASETPC or the one known from US 2013/0147640 A1 are disadvantageous for several reasons. Firstly, laser technology is expensive, contains moving components like mirrors, and is therefore complex in maintenance. Laser scanners are mechanical devices that can get broken. This is even worse in a demanding environment like a harbour where wet, windy and salty conditions are common. This problem is recognized in US 2013/0147640 A1 which therefore aims at reducing the amount of lasers in a vehicle alignment system. Laser technology is further disadvantageous because its functioning and accuracy are weather dependent. In rainy and/or foggy weather conditions, laser technology loses accuracy or even fails.
- one or more of the above identified objectives are achieved through a system enabling alignment of a terminal truck relative to a gantry crane as defined by claim 1, the terminal truck comprising a tractor and a trailer holding at least one container to be picked up by the crane, the system comprising:
- the system according to the invention combines knowledge of the tractor position with a distance measurement between the tractor and the container in order to determine the position of the container relative to the gantry crane with centimetre accuracy.
- the tractor can for instance be the unit or part of the terminal truck that comprises the engine and the driver cabin, but in case of an unmanned terminal truck can also be the unit or part of the terminal truck that only comprises the engine, or the unit or part of the terminal truck that comprises the engine and the battery in case of an electrical unmanned terminal truck. It is important that the distance measurement between tractor and container makes use of reflective technology wherein a signal is sent from the reference point, line or plane near the tractor towards the container, and its reflection on the container's front surface is captured and analysed to determine the distance between the tractor and container.
- the system according to the invention also gains knowledge on the type or the size of container that is carried by the terminal truck. This information may for instance be received from the crane PLC that controls movements of the crane spreader, or from another source external to the system according to the invention. Knowledge of the tractor position, tractor-container distance, and the type of container, enables to generate driving instructions for the terminal truck to position the container in alignment with the vertical centre plane of the gantry crane with centimetre accuracy.
- driving instructions may be processed and transformed for display or auditive playout to the terminal truck driver in order to assist the terminal truck driver positioning the terminal truck.
- the driving instructions may be processed and transformed into control signals for the steering unit of the terminal truck in case of an unmanned terminal truck. Consequently, the crane spreader can pick-up the container from the trailer and move it to the ship without any crane displacement.
- a container in the context of the present invention corresponds to any receptacle or enclosure holding products, like for instance a shipping container used for international transport and having standard lengths of 20 ft, 40 ft, 45ft.
- a gantry crane in the context of the current invention refers to a container handling crane located in the terminal of a port where containers are transferred.
- a gantry crane is a ship-to-shore crane, abbreviated STS crane, that transfers containers from ship to shore or from a terminal truck to ship.
- STS crane ship-to-shore crane
- Such gantry crane typically has vertical supports, i.e. two sea-side supports and two land-side supports moving along rails, horizontal beam, i.e. portal beams and sill beams, and a spreader moving along the crane's boom under instruction of a crane controller or crane PLC.
- a terminal truck in the context of the present invention represents any vehicle used to move containers within a container terminal.
- the term "terminal truck” thus encompasses an internal tractor vehicle, abbreviated ITV, but also may refer to a visiting truck that is used on the terminal and moves containers.
- a terminal truck typically has a tractor, that may alternatively be named a primer mover, a terminal tractor or a yard truck, and a chassis or trailer designed and dimensioned to hold one or plural containers.
- the trailer of a terminal truck typically has no locking pins to fix the position of the container(s) it is holding.
- a single trailer may for instance be dimensioned to hold a 45 ft container or alternatively hold two 20 ft containers.
- the terminal truck may require the presence of a driver in a driver cabin to steer the vehicle or alternatively may be an unmanned vehicle that moves autonomously under control of a steering unit and sensors.
- a receiver with connectivity to an external system in the context of the present invention refers to any wireless receiver or transceiver, like for instance a Wifi receiver, a Bluetooth receiver, a Zigbee receiver, etc. that connects wirelessly with the transmitter of an external system wherein information is available indicative for the container(s) held by the terminal truck.
- the external system may for instance be a terminal operating system, abbreviated TOS, that controls the movement and storage of various types of cargo in or around a container terminal or port.
- the position determination unit comprises one or more micro location technology antenna, abbreviated MLT antenna, mounted on the tractor.
- one or plural MLT antennas may for instance be roof-mounted on the terminal truck's driver cabin or may be mounted on a pole aside the roof of the driver cabin (in case of a manned terminal truck) or may be attached somewhere else to the tractor like for instance a pole mounted on the tractor's chassis (in case for instance of an unmanned terminal truck), and may be configured to determine the location of the tractor relative to the gantry crane through radio-based location technology.
- radio-based location technology achieves centimeter accuracy and has the advantage to be less weather sensitive than laser scanners.
- laser based location technology may be deployed to determine the position of the terminal truck's tractor under the crane.
- the distance measurement unit comprises an ultrasound emitter and sensor.
- a first sample reflective technology that could be deployed to measure the distance between the reference point, line or plain near the tractor and the container's front surface, comprises an ultrasound emitter and sensor.
- the ultrasound emitter is located in or near the reference point, line or plane, for instance a vertical reference plane through the center point of the terminal truck's cabin roof, and emits an ultrasound signal in the direction from the tractor to the trailer holding one or plural containers.
- the front surface of the first container reflects this ultrasound signal partially or entirely and the reflections are captured by the ultrasound sensor that is located also in or near the reference point, line or plane at the tractor.
- the distance from the reference point, line or plane at the tractor to the front surface of the container can be calculated with centimeter accuracy from the time difference between emitted and reflected ultrasound signals.
- Knowledge of the type or the size of container further enables to determine a reference point of the container, for instance the center point of the container, such that driving instructions can be generated enabling to move the terminal truck such that the reference point of the container becomes aligned with the crane's spreader without displacement of the crane.
- the distance measurement unit comprises a light detection and ranging sensor, abbreviated Lidar sensor.
- a second sample reflective technology that can be deployed to measure the distance between the reference point, line or plane near the tractor and a container carried by the trailer, comprises a Lidar sensor.
- a Lidar sensor makes use of line-of-sight technology, i.e. a light signal that is emitted in the direction of the trailer and the reflections of which on the front surface of a container carried by the trailer are captured.
- line-of-sight technology i.e. a light signal that is emitted in the direction of the trailer and the reflections of which on the front surface of a container carried by the trailer are captured.
- measuring the time difference between emission of a light signal and receipt of the corresponding reflected light signal enables to determine the distance from the reference point, line or plane at the tractor to the container's front surface with centimeter accuracy.
- Knowledge of the type or the size of container further enables to determine the reference point of the container, for instance the center point, such that driving instructions can be generated enabling to move the terminal truck such that the reference point of the container becomes aligned with the crane's spreader without displacement of the crane.
- the distance measurement unit comprises a radio detection and ranging transmitter and receiver, abbreviated a radar transmitter and receiver.
- a third sample reflective technology that enables to determine the distance between tractor and container located on the trailer relies on a radar.
- a radar transmitter located in or near the reference point, line or plane at the tractor emits a radio signal that is reflected on the front surface of the container. Measurement of the time difference between emission of the radar signal and receipt of the corresponding reflected radar signal enables to determine the distance between reference point, line or plane and front surface of the container with centimeter accuracy.
- Knowledge of the type of container or the size of container, as obtained from an external system allows to determine the location of a reference plane of the container, for instance the center plane, such that driving instructions can be generated enabling to align the reference plane of the container with the spreader of the crane without displacement of the crane.
- the external system comprises a crane controller of said crane.
- information directly or indirectly indicative for the size of the container may be obtained from the crane controller or crane PLC.
- the latter may have obtained such information from camera's scanning the container, or from a crane operator that has entered the information.
- the external system comprises a terminal operating system, abbreviated TOS.
- information directly or indirectly indicative for the size of the container located on the trailer of a terminal truck may also be obtained from a TOS, a system that controls the movement and storage of various types of cargo in or around a container terminal or port.
- the database that forms part of such TOS typically contains information on the containers to be transported, like the size or the type of container, the container ID, the goods contained therein, the status of the goods, etc.
- the external system comprises a yard management system, abbreviated YMS.
- information directly or indirectly indicative for the size of the container(s) carried by a terminal truck may be obtained from a yard management system.
- YMS is a software system that oversees the movement of trucks and trailers in the yard of a production facility, distribution center, warehouse, etc.
- the container information comprises the type of the at least one container.
- shipping containers used for international transport are standardized by an ISO standard.
- Containers of different sizes have different container type codes.
- the system according to the present invention can determine therefrom the size or length of the container. Knowledge of the location of the tractor, the distance from the tractor to the front surface of the container and the length or the size of the container, allows to determine the location of a reference plane of the container, for instance the center plane, on the trailer of the terminal truck. Using the location of the reference plane of the container, the system can then generate driving instructions enabling to align this reference plane with the crane's spreader.
- the container information comprises the size of the at least one container.
- embodiments of the present invention may obtain information that is directly indicative for the size or length of the container(s) when such information is available in the external system where it connects to.
- the information may for instance represent the length of the container in ft, like for instance 20 ft, 40 ft, 45 ft, ...
- the distance is measured with an accuracy of 10 centimeters or shorter.
- the spreader of a gantry crane typically has flaps as a result of which the tolerance on the alignment of the container to be picked-up relative to the crane amounts to 10 centimeters.
- the sum of errors which is the cumulated error from the tractor position determination and echo based distance measurement, should be less than 10 centimeters. Consequently, the distance between tractor and front surface of the container must be determined with an accuracy that is smaller than 10 centimeters.
- the position determination unit and the distance measurement unit are integrated in a single housing.
- preferred embodiments of the invention integrate the technology used to determine the location of the tractor like for instance one or plural MLT antennas and the technology used to determine the distance from the tractor to the container like for instance radar, lidar or ultrasound transmitters and emitters, in a single housing that can for instance be roof-mounted on the roof of the driver cabin, or that can be attached elsewhere to the tractor.
- the tractor of each terminal truck operating in a port can be equipped with such a module.
- the wireless receiver that connects with the external system to obtain information indicative for the container size may also be integrated in this housing, or alternatively may form part of an on-board module that also holds the computing unit that generates the driving instructions for the terminal truck driver or for the steering unit of the terminal truck.
- This on-board module may comprise a display and/or a loudspeaker to generate visible and/or audible instructions for the driver, or alternatively may comprise a processor that generates signalling for the steering unit in case the terminal truck is an unmanned vehicle. It is however noticed that in alternative embodiments, the different components of the system according to the invention may not be integrated in a single housing.
- the position determination unit may for instance comprise two or more antennas that must be spaced apart and therefore preferably become integrated in different housings that are positioned on or near the tractor.
- the reference point, line or plane corresponds to the center plane through an MLT antenna of the one or more MLT antenna.
- the reference point, line or plane from which the distance is measured towards the front surface of the container may be selected to correspond with a center point, center line or center plane of one of the MLT antenna(s). This further simplifies calculation of the position of the container.
- the present invention also relates to a corresponding method as defined by claim 14, enabling alignment of a terminal truck relative to a gantry crane, the terminal truck comprising a tractor and a trailer holding at least one container to be picked up by the crane, the method comprising:
- Fig. 1 shows a ship-to-shore crane or STS crane having four vertical supports 101, 102, 103 and 104, and four horizontal beams 105, 106, 107 and 108.
- Such STS crane typically has two horizontal sill beams 107 and 108 that are located at a height of 6 meters and two horizontal portal beams 105 and 106 that are located at a height of 13 to 16 meters.
- the portal beams 105 and 106 are oriented parallel to the crane's boom 150 whereas the sill beams 107 and 108 are oriented perpendicular thereto.
- a spreader 151 is moving to carry and transfer containers, e.g. from a ship to a truck, or vice versa.
- the present invention in particular concerns transfers of containers from a terminal truck to a ship.
- the STS crane further has four vertical supports of which 101 and 102 represent the sea-side supports and 103 and 104 represent the land-side supports.
- Such STS crane is used in ports as a result of which the crane is typically designed to have an operational wind load of 25 m/s, to have a breakdown wind load of 50 m/s, to function within a temperature range from -20 °C up to 50 °C, and at a humidity of up to 100 %.
- the STS crane is typically positioned on rails, not shown in Fig. 1 , such that the STS crane can be moved in the direction parallel to the quay border, i.e. the direction of the sill beams 107, 108. Movements of the STS crane along the rails and movements of the spreader 151 along the crane's boom 150 to transfer a container are controlled by a crane controller or PLC.
- Fig. 1 further shows three driving lanes 161, 162 and 163 under the STS crane, and three terminal trucks 110, 120 and 130 located respectively in driving lanes 161, 162 and 163, and carrying one or plural containers to be picked up by the spreader 151 of the STS crane for transfer to a ship.
- a first terminal truck 110 with tractor 111 and trailer 112 is located.
- the trailer 112 is carrying a single 20 ft container 113 that must be transferred to the ship.
- a second terminal truck 120 with tractor 121 and trailer 122 is located.
- the trailer 122 is carrying two 20 ft containers 123 and 124 that must be transferred to the ship.
- driving lane 163 a third terminal truck 130 with tractor 131 and trailer 132 is located.
- the trailer 132 is carrying a single 45 ft container 133 that must be transferred to the ship.
- the terminal trucks 110, 120 and 130 are equipped with a system that assists in alignment of the terminal truck with the crane, more particularly in alignment of the container to be transferred with the crane's boom 150 and spreader 151.
- the alignment assistance system comprises a roof-mounted module, i.e. a module that is attached to the roof of the terminal truck's cabin, and an on-board module, i.e. a module that is located on-board of the terminal truck cabin, typically within the visible range of the terminal truck driver.
- the first module when the terminal truck is an unmanned vehicle, the first module may be mounted on the tractor, for example on a vertical pole, and the second module may be a processing module that connects with the steering unit of the unmanned vehicle.
- the terminal trucks 110, 120 and 130 are assumed to be manned vehicles whose respective tractors 111, 121, 131 also comprise a driver cabin whereon the first module can be roof-mounted.
- the first terminal truck 110 shown in Fig. 1 is equipped with a roof-mounted module 115 and an on-board module 118 that are interconnected through a wireline or wireless connection.
- the third terminal truck 130 shown in Fig. 1 is also equipped with a roof-mounted module 135 and an on-board module 138 that are interconnected through a wireline or wireless connection.
- the alignment assistance system 115, 118 comprises technology that enables to determine the position of the tractor 111 relative to the crane, more precisely to determine the position of centre line 116 of the roof-mounted module 115 relative to centre line 152 of the crane's boom 150.
- the alignment assistance system 115, 118 further comprises technology that enables to determine the distance from the tractor 111 to the container 113 on the trailer 112, more precisely to determine the distance 117 from the centre line 116 of the roof-mounted module 115 to the front surface of container 113.
- the alignment assistance system 115, 118 further comprises technology that enables to gain knowledge on the size of container 113, more precisely to obtain information indicative for the length of container 113.
- the alignment assistance system 115, 118 can generate instructions for the driver allowing the driver to move truck 110 forward or backward in lane 161 until the centre line 119 of container 113 is aligned - within acceptable tolerances that may range up to 10 centimetres - with the centre line 152 of the crane's boom 150. Consequently, the crane no longer needs to be translated along its rails in order to enable pick-up of the container 113 as a result of which the terminal efficiency increases.
- the alignment assistance system 125, 128 comprises technology that enables to determine the position of the tractor 121 relative to the crane, more precisely to determine the position of centre line 126 of the roof-mounted module 125 relative to centre line 152 of the crane's boom 150.
- the alignment assistance system 125, 128 further comprises technology that enables to determine the distance from the tractor 121 to the first container 123 on the trailer 122, more precisely to determine the distance 127 from the centre line 126 of the roof-mounted module 125 to the front surface of this first container 123.
- the alignment assistance system 125, 128 further comprises technology that enables to gain knowledge on the size of container 123, more precisely to obtain information indicative for the length of container 123.
- the alignment assistance system 125, 128 can generate instructions allowing the driver to move truck 120 forward or backward in lane 162 until the centre line 129 of container 123 is aligned - within acceptable tolerances that may range up to 10 centimetres - with the centre line 152 of the crane's boom 150. Consequently, the crane no longer needs to be translated along its rails in order to enable pick-up of the container 123 as a result of which the terminal efficiency increases.
- the alignment assistance system 125, 128 is used to determine the position of the second container 124 on trailer 122 relative to the crane and to obtain information indicative for the length of this second container 124. Knowing the relative position of the second container 124 and the length of this container 124, the alignment assistance system 125, 128 can generate driving instructions enabling the driver to move truck 120 forward and backward until the second container 124 is aligned - within acceptable tolerances that may range up to 10 centimetres - with the centre line 152 of the crane's boom 150. Also for pick-up of the second container 124 carried by the same trailer 122, the crane need not be translated along its rails, further enhancing the efficiency of the terminal.
- the alignment assistance system 135, 138 comprises technology that enables to determine the position of the tractor 131 relative to the crane, more precisely to determine the position of centre line 136 of the roof-mounted module 135 relative to centre line 152 of the crane's boom 150.
- the alignment assistance system 135, 138 further comprises technology that enables to determine the distance from the tractor 131 to the container 133 on the trailer 132, more precisely to determine the distance 137 from the centre line 136 of the roof-mounted module 135 to the front surface of container 133.
- the alignment assistance system 135, 138 further comprises technology that enables to gain knowledge on the size of container 133, more precisely to obtain information indicative for the length of container 133, i.e. 45 ft.
- the alignment assistance system 135, 138 can generate instructions allowing the driver to move truck 130 forward or backward in lane 163 until the centre line 139 of container 133 is aligned - within acceptable tolerances that may range up to 10 centimetres - with the centre line 152 of the crane's boom 150. Consequently, the crane no longer needs to be translated along its rails in order to enable pick-up of the container 133 as a result of which the terminal efficiency further increases.
- the technology present in the roof-mounted modules 115, 125, 135 and in the on-board modules 118, 128, 138 of the above described alignment assistance systems is described in more detail with reference to Fig. 2 where the alignment assistance system is denoted 200.
- 201 represents a sample implementation of the roof-mounted modules 115, 125 and 135, and 202 represents a sample implementation of the on-board modules 118, 128 and 138.
- the roof-mounted module 201 and on-board module 202 are interconnected through a cable 203. In alternative embodiments of the invention, the interconnection may be wireless.
- the roof-mounted module 201 comprises a first Micro-Location Technology antenna or MLT antenna 211 and a second MLT antenna 212.
- the MLT antenna's 211 and 212 capture signals of one or more beacon located in the terminal area, enabling to accurately determine the position of the centre line of roof-mounted module 201 relative to the centre line of the boom of the crane located in the terminal.
- Alternative position determination technologies may be deployed to determine the position of the roof-mounted module 201 relative to the crane, like for instance GPS or laser scanners, provided that these technologies reach an accuracy of at most a few centimetres, and provided that these technologies operate reliably under the crane and in difficult weather conditions.
- the signals captured by the MLT antennas 211 and 212 are transferred to a computing unit 223 in on-board module 202.
- the roof-mounted module 201 further comprises an ultrasound transmitter 213, configured to generate on instruction of the computing unit 223 an ultrasound signal 231 that is emitted in the direction from tractor to trailer.
- the roof-mounted module 201 further also comprises an ultrasound receiver 214 able to capture the reflected ultrasound signal 232 that results from reflection of ultrasound signal 231 on the front surface of a container carried by the trailer.
- the time of transmission of ultrasound signal 231 and the time of receipt of ultrasound signal 232 are reported to the computing unit 223.
- Alternative implementations of the roof-mounted module may rely on different reflective technologies, like for instance radar technology or Lidar technology, provided these technologies reach an acceptable accuracy of at most a few centimetres, and provided these reflective technologies work properly under a crane in difficult weather conditions.
- the on-board module 202 in addition to the computing unit 223 also comprises a WiFi transceiver 221 that is configured to communicate with the crane controller, or alternatively with a terminal operating system or yard management system to obtain therefrom information indicative for the length of the container or containers carried by the trailer.
- the information may comprise a container code, a container size, a container size code, etc.
- This information is transferred to the container information receiver 222 in on-board module 202 to enable extraction of the length of the container that is located upfront on the trailer, i.e. the container whose front surface has reflected ultrasound signal 231.
- the length of the container as determined by the container information receiver 222 is reported to computing unit 223.
- Computing unit 223 is configured with a software program to determine the distance from the centre line of roof-mounted module 201 to the centre line of the crane's boom from the signalling obtained from MLT antennas 211 and 212.
- Computing unit 223 is further configured with software code to determine the distance from the centre line of the roof-mounted module 201 to the front surface of the container that reflected ultrasound signal 231 from the time information received from ultrasound transmitter 213 and ultrasound receiver 232.
- the processor can generate instructions for the driver to move the terminal truck either forward or backward.
- the terminal truck must be moved backward. As long as D1 is smaller than D2 + L/2, the terminal truck must be moved forward.
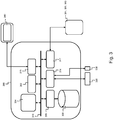
- Fig. 3 shows a suitable computing system 300 enabling to implement embodiments of the computing unit 223 that is used in embodiments of the invention.
- Computing system 300 may in general be formed as a suitable general-purpose computer and comprise a bus 310, a processor 302, a local memory 304, one or more optional input interfaces 314, one or more optional output interfaces 316, a communication interface 312, a storage element interface 306, and one or more storage elements 308.
- Bus 310 may comprise one or more conductors that permit communication among the components of the computing system 300.
- Processor 302 may include any type of conventional processor or microprocessor that interprets and executes programming instructions.
- Local memory 304 may include a random-access memory (RAM) or another type of dynamic storage device that stores information and instructions for execution by processor 302 and/or a read only memory (ROM) or another type of static storage device that stores static information and instructions for use by processor 302.
- Input interface 314 may comprise one or more conventional mechanisms that permit an operator or user to input information to the computing unit 300, such as a keyboard 320, a mouse 330, a pen, voice recognition and/or biometric mechanisms, a camera, etc.
- Output interface 316 may comprise one or more conventional mechanisms that output information to the operator or user, such as a display 340, etc.
- Communication interface 312 may comprise any transceiver-like mechanism such as for example one or more Ethernet interfaces that enables computing system 300 to communicate with other devices and/or systems, for example with other computing units 381, 382, 383.
- the communication interface 312 of computing system 300 may be connected to such another computing system by means of a local area network (LAN) or a wide area network (WAN) such as for example the internet.
- Storage element interface 306 may comprise a storage interface such as for example a Serial Advanced Technology Attachment (SATA) interface or a Small Computer System Interface (SCSI) for connecting bus 310 to one or more storage elements 308, such as one or more local disks, for example SATA disk drives, and control the reading and writing of data to and/or from these storage elements 308.
- SATA Serial Advanced Technology Attachment
- SCSI Small Computer System Interface
- the storage element(s) 308 above is/are described as a local disk, in general any other suitable computer-readable media such as a removable magnetic disk, optical storage media such as a CD or DVD, -ROM disk, solid state drives, flash memory cards, ... could be used. It is noticed that the entire method according to the present invention can be executed centralized, e.g. on a server in a management centre or in a cloud system, or it can be partially executed on a remote electronic device, e.g. worn by the user, and partially on a central server. Computing system 300 could thus correspond to the processing system available centrally or the processing system available in the electronic device.
- top, bottom, over, under, and the like are introduced for descriptive purposes and not necessarily to denote relative positions. It is to be understood that the terms so used are interchangeable under appropriate circumstances and embodiments of the invention are capable of operating according to the present invention in other sequences, or in orientations different from the one(s) described or illustrated above.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Control And Safety Of Cranes (AREA)
Abstract
Description
- The present invention generally relates to moving a container from a terminal truck using a gantry crane, for example loading a container or several containers from a terminal truck onto a ship using a ship-to-shore crane that is located on the quay along a dock in a harbour. The gantry crane has a spreader to pick-up the container from the terminal truck's trailer and drop the container on the ship, and the gantry crane typically is positioned on rails such that it can move substantially parallel to the quay border.
- In order to optimize the ship loading process, alignment of the terminal truck carrying a container to be loaded onto the ship relative to the crane is important to avoid that any crane displacement is needed in order to move a container from the trailer or chassis of the terminal truck onto the ship. More precisely, alignment of the container residing on the trailer of the terminal truck relative to the crane's spreader must be accomplished with a typical alignment accuracy of 10 centimetres or less. Otherwise, displacement of the gantry crane along the rail is needed before the spreader can pick-up the container from the trailer. Such crane displacements along the rail in order to align the spreader of the crane with the containers to be picked-up are time consuming and consequently significantly reduce the container terminal efficiency expressed as an amount of containers that is loaded onto the ship per time unit.
- It is common practice to assist the driver of a terminal truck with driving instructions that enable to position the terminal truck at a desired location. International patent application
WO 2018/087141 A1 entitled "Radio-Location System for Determining the Location of a Transportation Vehicle for Containers" describes a positioning system for a transportation vehicle for containers in a working area. The system known fromWO 2018/087141 A1 consists of plural antennas roof-mounted on the truck and location markers, i.e. other antennas, spread across the working area. Through radio technology, accurate determination of the position of the truck is possible. The position information is used to generate driving instructions for the truck driver. - Although the truck is accurately located through the radio technology, the system of
WO 2018/087141 A1 fails to accurately determine the position of the container to be moved from the truck trailer onto the ship. Nevertheless, rather the position of the container is important instead of the position of the truck cabin. The position of the container can vary for various reasons: the chassis or trailer of a terminal truck typically has no pins as a result of which the container has no predetermined, fixed position relative to the terminal truck cabin, the size of the container can vary (for example 20 ft, 40 ft, 45 ft, ...), multiple containers may reside on a single trailer (for example the same trailer may be used to carry two 20 ft containers or a single 40 ft container), etc. - Alternative existing systems that determine the position of a truck relative to a crane relying on laser scanners. The LASETPC system described at URL:
https://www.lase.de/en/products/port-logistics/truck-positioning-sts.html relies on 3D laser scanners positioned on the crane to determine the position of the truck, trailer or container with alleged millimetre accuracy. - Also US patent application
US 2013/0147640 A1 entitled "Container Handler Alignment System and Method" describes a system with laser scanners in fixed positions on the crane's sill beam to determine the type, position and orientation of a vehicle, and a processor that generates driving instructions for the vehicle driver. The system known fromUS 2013/0147640 A1 allegedly outperforms other laser-based systems in that a reduced number of lasers is used therein, i.e. a first laser to detect presence, location and orientation of any vehicle and a second laser to determine presence, location and orientation of containers loaded on the vehicle. Direction indicators attached to the sill beams indicate to the vehicle drivers whether their vehicle is properly positioned, needs to be moved backward or forward, and whether their vehicle orientation is skewed. - Laser based systems like LASETPC or the one known from
US 2013/0147640 A1 are disadvantageous for several reasons. Firstly, laser technology is expensive, contains moving components like mirrors, and is therefore complex in maintenance. Laser scanners are mechanical devices that can get broken. This is even worse in a demanding environment like a harbour where wet, windy and salty conditions are common. This problem is recognized inUS 2013/0147640 A1 which therefore aims at reducing the amount of lasers in a vehicle alignment system. Laser technology is further disadvantageous because its functioning and accuracy are weather dependent. In rainy and/or foggy weather conditions, laser technology loses accuracy or even fails. Wet contours of a container for instance are difficult to detect through laser scanners as a result of which existing laser-based vehicle alignment systems fail to provide accurate driving instructions to terminal truck drivers in rainy weather. When more lanes are used in a terminal to transfer containers from terminal trucks to a ship, the cost for deploying and maintaining laser technology to align terminal trucks with the gantry crane is even worse, as more laser devices are required to scan the different lanes and more direction messaging boards are required to guide the terminal truck drivers in the different lanes. - It is an object to disclose embodiments of a system and method enabling alignment of a terminal truck relative to a gantry crane that resolve one or more of the above identified shortcomings of existing systems. More particularly it is an object to provide a system and method that improves the efficiency of the container loading process through accurate alignment of the container(s) carried by a terminal truck relative to the gantry crane. It is a further object to provide such a system and method that is less sensitive to weather conditions, that operates reliably under a crane, that is less expensive in and less demanding in maintenance.
- According to the present invention, one or more of the above identified objectives are achieved through a system enabling alignment of a terminal truck relative to a gantry crane as defined by claim 1, the terminal truck comprising a tractor and a trailer holding at least one container to be picked up by the crane, the system comprising:
- a position determination unit configured to determine a tractor position for the tractor relative to the crane;
- a receiver with connectivity to an external system, the receiver being configured to receive from the external system container information indicative for the size of the at least one container;
- a distance measurement unit configured to measure a distance between a reference point, line or plane at the tractor and a front surface of the at least one container based on reflective technology; and
- a computing unit coupled to the position determination unit, the receiver and the distance measurement unit, the computing unit being configured to collect the tractor position, the container information, and the distance, and further being configured to generate therefrom driving instructions to enable positioning the at least one container in a predetermined aligned position relative to the crane.
- Thus, the system according to the invention combines knowledge of the tractor position with a distance measurement between the tractor and the container in order to determine the position of the container relative to the gantry crane with centimetre accuracy. The tractor can for instance be the unit or part of the terminal truck that comprises the engine and the driver cabin, but in case of an unmanned terminal truck can also be the unit or part of the terminal truck that only comprises the engine, or the unit or part of the terminal truck that comprises the engine and the battery in case of an electrical unmanned terminal truck. It is important that the distance measurement between tractor and container makes use of reflective technology wherein a signal is sent from the reference point, line or plane near the tractor towards the container, and its reflection on the container's front surface is captured and analysed to determine the distance between the tractor and container. Such reflective technology is more reliable than scanners, is not sensitive to weather conditions and also operates under a crane. Compared to laser scanners, reflective technology like radars, lidars, etc. are inexpensive and require low maintenance. In addition to the tractor position and the distance between tractor and container, the system according to the invention also gains knowledge on the type or the size of container that is carried by the terminal truck. This information may for instance be received from the crane PLC that controls movements of the crane spreader, or from another source external to the system according to the invention. Knowledge of the tractor position, tractor-container distance, and the type of container, enables to generate driving instructions for the terminal truck to position the container in alignment with the vertical centre plane of the gantry crane with centimetre accuracy. These driving instructions may be processed and transformed for display or auditive playout to the terminal truck driver in order to assist the terminal truck driver positioning the terminal truck. Alternatively, the driving instructions may be processed and transformed into control signals for the steering unit of the terminal truck in case of an unmanned terminal truck. Consequently, the crane spreader can pick-up the container from the trailer and move it to the ship without any crane displacement.
- A container in the context of the present invention corresponds to any receptacle or enclosure holding products, like for instance a shipping container used for international transport and having standard lengths of 20 ft, 40 ft, 45ft.
- A gantry crane in the context of the current invention refers to a container handling crane located in the terminal of a port where containers are transferred. One example of such gantry crane is a ship-to-shore crane, abbreviated STS crane, that transfers containers from ship to shore or from a terminal truck to ship. Such gantry crane typically has vertical supports, i.e. two sea-side supports and two land-side supports moving along rails, horizontal beam, i.e. portal beams and sill beams, and a spreader moving along the crane's boom under instruction of a crane controller or crane PLC.
- A terminal truck in the context of the present invention represents any vehicle used to move containers within a container terminal. The term "terminal truck" thus encompasses an internal tractor vehicle, abbreviated ITV, but also may refer to a visiting truck that is used on the terminal and moves containers. A terminal truck typically has a tractor, that may alternatively be named a primer mover, a terminal tractor or a yard truck, and a chassis or trailer designed and dimensioned to hold one or plural containers. The trailer of a terminal truck typically has no locking pins to fix the position of the container(s) it is holding. A single trailer may for instance be dimensioned to hold a 45 ft container or alternatively hold two 20 ft containers. The terminal truck may require the presence of a driver in a driver cabin to steer the vehicle or alternatively may be an unmanned vehicle that moves autonomously under control of a steering unit and sensors.
- A receiver with connectivity to an external system in the context of the present invention refers to any wireless receiver or transceiver, like for instance a Wifi receiver, a Bluetooth receiver, a Zigbee receiver, etc. that connects wirelessly with the transmitter of an external system wherein information is available indicative for the container(s) held by the terminal truck. The external system may for instance be a terminal operating system, abbreviated TOS, that controls the movement and storage of various types of cargo in or around a container terminal or port.
- In embodiments of the system according to the invention, as defined by claim 2, the position determination unit comprises one or more micro location technology antenna, abbreviated MLT antenna, mounted on the tractor.
- Indeed, one or plural MLT antennas may for instance be roof-mounted on the terminal truck's driver cabin or may be mounted on a pole aside the roof of the driver cabin (in case of a manned terminal truck) or may be attached somewhere else to the tractor like for instance a pole mounted on the tractor's chassis (in case for instance of an unmanned terminal truck), and may be configured to determine the location of the tractor relative to the gantry crane through radio-based location technology. Such radio-based location technology achieves centimeter accuracy and has the advantage to be less weather sensitive than laser scanners. Alternatively however, laser based location technology may be deployed to determine the position of the terminal truck's tractor under the crane.
- In embodiments of the system according to the present invention, as defined by claim 3, the distance measurement unit comprises an ultrasound emitter and sensor.
- Thus, a first sample reflective technology that could be deployed to measure the distance between the reference point, line or plain near the tractor and the container's front surface, comprises an ultrasound emitter and sensor. The ultrasound emitter is located in or near the reference point, line or plane, for instance a vertical reference plane through the center point of the terminal truck's cabin roof, and emits an ultrasound signal in the direction from the tractor to the trailer holding one or plural containers. The front surface of the first container reflects this ultrasound signal partially or entirely and the reflections are captured by the ultrasound sensor that is located also in or near the reference point, line or plane at the tractor. By processing the emitted and reflected ultrasound signals, the distance from the reference point, line or plane at the tractor to the front surface of the container can be calculated with centimeter accuracy from the time difference between emitted and reflected ultrasound signals. Knowledge of the type or the size of container further enables to determine a reference point of the container, for instance the center point of the container, such that driving instructions can be generated enabling to move the terminal truck such that the reference point of the container becomes aligned with the crane's spreader without displacement of the crane.
- In alternate embodiments of the system according to the present invention, as defined by claim 4, the distance measurement unit comprises a light detection and ranging sensor, abbreviated Lidar sensor.
- Thus, a second sample reflective technology that can be deployed to measure the distance between the reference point, line or plane near the tractor and a container carried by the trailer, comprises a Lidar sensor. Such Lidar sensor makes use of line-of-sight technology, i.e. a light signal that is emitted in the direction of the trailer and the reflections of which on the front surface of a container carried by the trailer are captured. Again, measuring the time difference between emission of a light signal and receipt of the corresponding reflected light signal enables to determine the distance from the reference point, line or plane at the tractor to the container's front surface with centimeter accuracy. Knowledge of the type or the size of container further enables to determine the reference point of the container, for instance the center point, such that driving instructions can be generated enabling to move the terminal truck such that the reference point of the container becomes aligned with the crane's spreader without displacement of the crane.
- In further alternative embodiments of the system according to the present invention, as defined by claim 5, the distance measurement unit comprises a radio detection and ranging transmitter and receiver, abbreviated a radar transmitter and receiver.
- Indeed, a third sample reflective technology that enables to determine the distance between tractor and container located on the trailer relies on a radar. A radar transmitter located in or near the reference point, line or plane at the tractor emits a radio signal that is reflected on the front surface of the container. Measurement of the time difference between emission of the radar signal and receipt of the corresponding reflected radar signal enables to determine the distance between reference point, line or plane and front surface of the container with centimeter accuracy. Knowledge of the type of container or the size of container, as obtained from an external system, allows to determine the location of a reference plane of the container, for instance the center plane, such that driving instructions can be generated enabling to align the reference plane of the container with the spreader of the crane without displacement of the crane.
- In embodiments of the system according to the present invention, defined by claim 6, the external system comprises a crane controller of said crane.
- Thus, information directly or indirectly indicative for the size of the container may be obtained from the crane controller or crane PLC. The latter may have obtained such information from camera's scanning the container, or from a crane operator that has entered the information.
- In alternate embodiments of the system according to the invention, defined by claim 7, the external system comprises a terminal operating system, abbreviated TOS.
- Indeed, information directly or indirectly indicative for the size of the container located on the trailer of a terminal truck may also be obtained from a TOS, a system that controls the movement and storage of various types of cargo in or around a container terminal or port. The database that forms part of such TOS typically contains information on the containers to be transported, like the size or the type of container, the container ID, the goods contained therein, the status of the goods, etc.
- In further alternate embodiments of the system according to the present invention, defined by claim 8, the external system comprises a yard management system, abbreviated YMS.
- Thus, according to yet another alternative, information directly or indirectly indicative for the size of the container(s) carried by a terminal truck may be obtained from a yard management system. Such YMS is a software system that oversees the movement of trucks and trailers in the yard of a production facility, distribution center, warehouse, etc.
- In embodiments of the system according to the invention, defined by claim 9, the container information comprises the type of the at least one container.
- Indeed, shipping containers used for international transport are standardized by an ISO standard. Containers of different sizes have different container type codes. If the information obtained from the external system comprises the standardized container type code, the system according to the present invention can determine therefrom the size or length of the container. Knowledge of the location of the tractor, the distance from the tractor to the front surface of the container and the length or the size of the container, allows to determine the location of a reference plane of the container, for instance the center plane, on the trailer of the terminal truck. Using the location of the reference plane of the container, the system can then generate driving instructions enabling to align this reference plane with the crane's spreader.
- In alternate embodiments of the system according to the present invention, defined by claim 10, the container information comprises the size of the at least one container.
- Indeed, instead of obtaining information like the type of container that indirectly indicates the size or length of the container(s) carried by a terminal truck, embodiments of the present invention may obtain information that is directly indicative for the size or length of the container(s) when such information is available in the external system where it connects to. The information may for instance represent the length of the container in ft, like for instance 20 ft, 40 ft, 45 ft, ...
- In embodiments of the system according to the present invention, defined by claim 11, the distance is measured with an accuracy of 10 centimeters or shorter.
- The spreader of a gantry crane typically has flaps as a result of which the tolerance on the alignment of the container to be picked-up relative to the crane amounts to 10 centimeters. The sum of errors, which is the cumulated error from the tractor position determination and echo based distance measurement, should be less than 10 centimeters. Consequently, the distance between tractor and front surface of the container must be determined with an accuracy that is smaller than 10 centimeters.
- In embodiments of the system according to the present invention, as defined by claim 12, the position determination unit and the distance measurement unit are integrated in a single housing.
- Hence, preferred embodiments of the invention integrate the technology used to determine the location of the tractor like for instance one or plural MLT antennas and the technology used to determine the distance from the tractor to the container like for instance radar, lidar or ultrasound transmitters and emitters, in a single housing that can for instance be roof-mounted on the roof of the driver cabin, or that can be attached elsewhere to the tractor. The tractor of each terminal truck operating in a port can be equipped with such a module. The wireless receiver that connects with the external system to obtain information indicative for the container size may also be integrated in this housing, or alternatively may form part of an on-board module that also holds the computing unit that generates the driving instructions for the terminal truck driver or for the steering unit of the terminal truck. This on-board module may comprise a display and/or a loudspeaker to generate visible and/or audible instructions for the driver, or alternatively may comprise a processor that generates signalling for the steering unit in case the terminal truck is an unmanned vehicle. It is however noticed that in alternative embodiments, the different components of the system according to the invention may not be integrated in a single housing. The position determination unit may for instance comprise two or more antennas that must be spaced apart and therefore preferably become integrated in different housings that are positioned on or near the tractor.
- In embodiments of the system according to the present invention, as defined by claim 13, the reference point, line or plane corresponds to the center plane through an MLT antenna of the one or more MLT antenna.
- In particular when MLT antenna(s) and the reflective distance measurement technology are integrated in a single housing, the reference point, line or plane from which the distance is measured towards the front surface of the container may be selected to correspond with a center point, center line or center plane of one of the MLT antenna(s). This further simplifies calculation of the position of the container.
- In addition to a system as defined by claim 1, the present invention also relates to a corresponding method as defined by claim 14, enabling alignment of a terminal truck relative to a gantry crane, the terminal truck comprising a tractor and a trailer holding at least one container to be picked up by the crane, the method comprising:
- determining a tractor position for the tractor relative to the crane;
- receiving from an external system container information indicative for the size of the at least one container;
- measuring a distance between a reference point, line or plane at the tractor and a front surface of the at least one container based on reflective technology; and
- generating from the tractor position, the container information, and the distance driving instructions to enable positioning the at least one container in a predetermined aligned position relative to the crane.
-
-
Fig. 1 illustrates an embodiment of the system and method for alignment of a terminal truck relative to a ship-to-shore crane according to the present invention; -
Fig. 2 is a functional block scheme of an embodiment of the system for alignment of a terminal truck relative to a ship-to-shore crane according to the present invention; and -
Fig. 3 illustrates asuitable computing system 300 for realizing portions of the system and method according to embodiments of the invention. -
Fig. 1 shows a ship-to-shore crane or STS crane having fourvertical supports horizontal beams portal beams boom 150 whereas the sill beams 107 and 108 are oriented perpendicular thereto. Along the crane'sboom 150, aspreader 151 is moving to carry and transfer containers, e.g. from a ship to a truck, or vice versa. The present invention in particular concerns transfers of containers from a terminal truck to a ship. As mentioned, the STS crane further has four vertical supports of which 101 and 102 represent the sea-side supports and 103 and 104 represent the land-side supports. Such STS crane is used in ports as a result of which the crane is typically designed to have an operational wind load of 25 m/s, to have a breakdown wind load of 50 m/s, to function within a temperature range from -20 °C up to 50 °C, and at a humidity of up to 100 %. The STS crane is typically positioned on rails, not shown inFig. 1 , such that the STS crane can be moved in the direction parallel to the quay border, i.e. the direction of the sill beams 107, 108. Movements of the STS crane along the rails and movements of thespreader 151 along the crane'sboom 150 to transfer a container are controlled by a crane controller or PLC. -
Fig. 1 further shows three drivinglanes terminal trucks lanes spreader 151 of the STS crane for transfer to a ship. Indriving lane 161, a firstterminal truck 110 withtractor 111 andtrailer 112 is located. Thetrailer 112 is carrying a single 20ft container 113 that must be transferred to the ship. Indriving lane 162, a secondterminal truck 120 withtractor 121 andtrailer 122 is located. Thetrailer 122 is carrying two 20ft containers driving lane 163, a thirdterminal truck 130 withtractor 131 andtrailer 132 is located. Thetrailer 132 is carrying a single 45ft container 133 that must be transferred to the ship. - To avoid or minimize translation of the crane along the rails in order to align the crane's
boom 150 andspreader 151 with the container to be transferred, theterminal trucks boom 150 andspreader 151. The alignment assistance system comprises a roof-mounted module, i.e. a module that is attached to the roof of the terminal truck's cabin, and an on-board module, i.e. a module that is located on-board of the terminal truck cabin, typically within the visible range of the terminal truck driver. Alternatively, when the terminal truck is an unmanned vehicle, the first module may be mounted on the tractor, for example on a vertical pole, and the second module may be a processing module that connects with the steering unit of the unmanned vehicle. In the example ofFig. 1 , theterminal trucks respective tractors terminal truck 110 shown inFig. 1 is equipped with a roof-mountedmodule 115 and an on-board module 118 that are interconnected through a wireline or wireless connection. The secondterminal truck 120 shown inFig. 1 is equipped with a roof-mountedmodule 125 and an on-board module 128 that are interconnected through a wireline or wireless connection. The thirdterminal truck 130 shown inFig. 1 is also equipped with a roof-mountedmodule 135 and an on-board module 138 that are interconnected through a wireline or wireless connection. - The
alignment assistance system tractor 111 relative to the crane, more precisely to determine the position ofcentre line 116 of the roof-mountedmodule 115 relative tocentre line 152 of the crane'sboom 150. Thealignment assistance system tractor 111 to thecontainer 113 on thetrailer 112, more precisely to determine thedistance 117 from thecentre line 116 of the roof-mountedmodule 115 to the front surface ofcontainer 113. Thealignment assistance system container 113, more precisely to obtain information indicative for the length ofcontainer 113. Knowing the position of thetractor 111, the distance betweentractor 111 andcontainer 113, and the size of thecontainer 113, thealignment assistance system truck 110 forward or backward inlane 161 until thecentre line 119 ofcontainer 113 is aligned - within acceptable tolerances that may range up to 10 centimetres - with thecentre line 152 of the crane'sboom 150. Consequently, the crane no longer needs to be translated along its rails in order to enable pick-up of thecontainer 113 as a result of which the terminal efficiency increases. - Similarly, the
alignment assistance system tractor 121 relative to the crane, more precisely to determine the position ofcentre line 126 of the roof-mountedmodule 125 relative tocentre line 152 of the crane'sboom 150. Thealignment assistance system tractor 121 to thefirst container 123 on thetrailer 122, more precisely to determine thedistance 127 from thecentre line 126 of the roof-mountedmodule 125 to the front surface of thisfirst container 123. Thealignment assistance system container 123, more precisely to obtain information indicative for the length ofcontainer 123. Knowing the position of thetractor 121, the distance betweentractor 121 andcontainer 123, and the size of thecontainer 123, thealignment assistance system truck 120 forward or backward inlane 162 until thecentre line 129 ofcontainer 123 is aligned - within acceptable tolerances that may range up to 10 centimetres - with thecentre line 152 of the crane'sboom 150. Consequently, the crane no longer needs to be translated along its rails in order to enable pick-up of thecontainer 123 as a result of which the terminal efficiency increases. Oncecontainer 123 has been transferred to the ship, thealignment assistance system second container 124 ontrailer 122 relative to the crane and to obtain information indicative for the length of thissecond container 124. Knowing the relative position of thesecond container 124 and the length of thiscontainer 124, thealignment assistance system truck 120 forward and backward until thesecond container 124 is aligned - within acceptable tolerances that may range up to 10 centimetres - with thecentre line 152 of the crane'sboom 150. Also for pick-up of thesecond container 124 carried by thesame trailer 122, the crane need not be translated along its rails, further enhancing the efficiency of the terminal. - Further similarly, the
alignment assistance system tractor 131 relative to the crane, more precisely to determine the position ofcentre line 136 of the roof-mountedmodule 135 relative tocentre line 152 of the crane'sboom 150. Thealignment assistance system tractor 131 to thecontainer 133 on thetrailer 132, more precisely to determine thedistance 137 from thecentre line 136 of the roof-mountedmodule 135 to the front surface ofcontainer 133. Thealignment assistance system container 133, more precisely to obtain information indicative for the length ofcontainer 133, i.e. 45 ft. Knowing the position of thetractor 131, the distance betweentractor 131 andcontainer 133, and the size of thecontainer 133, thealignment assistance system truck 130 forward or backward inlane 163 until thecentre line 139 ofcontainer 133 is aligned - within acceptable tolerances that may range up to 10 centimetres - with thecentre line 152 of the crane'sboom 150. Consequently, the crane no longer needs to be translated along its rails in order to enable pick-up of thecontainer 133 as a result of which the terminal efficiency further increases. - The technology present in the roof-mounted
modules board modules Fig. 2 where the alignment assistance system is denoted 200. Herein, 201 represents a sample implementation of the roof-mountedmodules board modules module 201 and on-board module 202 are interconnected through acable 203. In alternative embodiments of the invention, the interconnection may be wireless. The roof-mountedmodule 201 comprises a first Micro-Location Technology antenna orMLT antenna 211 and asecond MLT antenna 212. The MLT antenna's 211 and 212 capture signals of one or more beacon located in the terminal area, enabling to accurately determine the position of the centre line of roof-mountedmodule 201 relative to the centre line of the boom of the crane located in the terminal. Alternative position determination technologies may be deployed to determine the position of the roof-mountedmodule 201 relative to the crane, like for instance GPS or laser scanners, provided that these technologies reach an accuracy of at most a few centimetres, and provided that these technologies operate reliably under the crane and in difficult weather conditions. The signals captured by theMLT antennas computing unit 223 in on-board module 202. The roof-mountedmodule 201 further comprises anultrasound transmitter 213, configured to generate on instruction of thecomputing unit 223 anultrasound signal 231 that is emitted in the direction from tractor to trailer. The roof-mountedmodule 201 further also comprises anultrasound receiver 214 able to capture the reflectedultrasound signal 232 that results from reflection ofultrasound signal 231 on the front surface of a container carried by the trailer. The time of transmission ofultrasound signal 231 and the time of receipt ofultrasound signal 232 are reported to thecomputing unit 223. Alternative implementations of the roof-mounted module may rely on different reflective technologies, like for instance radar technology or Lidar technology, provided these technologies reach an acceptable accuracy of at most a few centimetres, and provided these reflective technologies work properly under a crane in difficult weather conditions. The on-board module 202 in addition to thecomputing unit 223 also comprises aWiFi transceiver 221 that is configured to communicate with the crane controller, or alternatively with a terminal operating system or yard management system to obtain therefrom information indicative for the length of the container or containers carried by the trailer. The information may comprise a container code, a container size, a container size code, etc. This information is transferred to thecontainer information receiver 222 in on-board module 202 to enable extraction of the length of the container that is located upfront on the trailer, i.e. the container whose front surface has reflectedultrasound signal 231. The length of the container as determined by thecontainer information receiver 222 is reported tocomputing unit 223.Computing unit 223 is configured with a software program to determine the distance from the centre line of roof-mountedmodule 201 to the centre line of the crane's boom from the signalling obtained fromMLT antennas Computing unit 223 is further configured with software code to determine the distance from the centre line of the roof-mountedmodule 201 to the front surface of the container that reflected ultrasound signal 231 from the time information received fromultrasound transmitter 213 andultrasound receiver 232. Using the distance D1 between the centre line of roof-mountedmodule 201 and the centre line of the crane's boom, the distance D2 between the centre-line of the roof-mountedmodule 201, and the length L of the container, the processor can generate instructions for the driver to move the terminal truck either forward or backward. As long as D1 is greater than D2 + L/2, the terminal truck must be moved backward. As long as D1 is smaller than D2 + L/2, the terminal truck must be moved forward. The so generated instructions can be communicated audibly to the driver viaspeaker 225 or visibly throughdisplay 224. The measurement and generation of instructions is repeated iteratively until the terminal truck is aligned with the crane, which is achieved when D1 = D2 + L/2 within acceptable tolerances. -
Fig. 3 shows asuitable computing system 300 enabling to implement embodiments of thecomputing unit 223 that is used in embodiments of the invention.Computing system 300 may in general be formed as a suitable general-purpose computer and comprise abus 310, aprocessor 302, alocal memory 304, one or more optional input interfaces 314, one or moreoptional output interfaces 316, acommunication interface 312, astorage element interface 306, and one ormore storage elements 308.Bus 310 may comprise one or more conductors that permit communication among the components of thecomputing system 300.Processor 302 may include any type of conventional processor or microprocessor that interprets and executes programming instructions.Local memory 304 may include a random-access memory (RAM) or another type of dynamic storage device that stores information and instructions for execution byprocessor 302 and/or a read only memory (ROM) or another type of static storage device that stores static information and instructions for use byprocessor 302.Input interface 314 may comprise one or more conventional mechanisms that permit an operator or user to input information to thecomputing unit 300, such as akeyboard 320, amouse 330, a pen, voice recognition and/or biometric mechanisms, a camera, etc.Output interface 316 may comprise one or more conventional mechanisms that output information to the operator or user, such as adisplay 340, etc.Communication interface 312 may comprise any transceiver-like mechanism such as for example one or more Ethernet interfaces that enablescomputing system 300 to communicate with other devices and/or systems, for example with other computing units 381, 382, 383. Thecommunication interface 312 ofcomputing system 300 may be connected to such another computing system by means of a local area network (LAN) or a wide area network (WAN) such as for example the internet.Storage element interface 306 may comprise a storage interface such as for example a Serial Advanced Technology Attachment (SATA) interface or a Small Computer System Interface (SCSI) for connectingbus 310 to one ormore storage elements 308, such as one or more local disks, for example SATA disk drives, and control the reading and writing of data to and/or from thesestorage elements 308. Although the storage element(s) 308 above is/are described as a local disk, in general any other suitable computer-readable media such as a removable magnetic disk, optical storage media such as a CD or DVD, -ROM disk, solid state drives, flash memory cards, ... could be used. It is noticed that the entire method according to the present invention can be executed centralized, e.g. on a server in a management centre or in a cloud system, or it can be partially executed on a remote electronic device, e.g. worn by the user, and partially on a central server.Computing system 300 could thus correspond to the processing system available centrally or the processing system available in the electronic device. - Although the present invention has been illustrated by reference to specific embodiments, it will be apparent to those skilled in the art that the invention is not limited to the details of the foregoing illustrative embodiments, and that the present invention may be embodied with various changes and modifications without departing from the scope thereof. The present embodiments are therefore to be considered in all respects as illustrative and not restrictive, the scope of the invention being indicated by the appended claims rather than by the foregoing description, and all changes which come within the meaning and range of equivalency of the claims are therefore intended to be embraced therein. In other words, it is contemplated to cover any and all modifications, variations or equivalents that fall within the scope of the basic underlying principles and whose essential attributes are claimed in this patent application. It will furthermore be understood by the reader of this patent application that the words "comprising" or "comprise" do not exclude other elements or steps, that the words "a" or "an" do not exclude a plurality, and that a single element, such as a computer system, a processor, or another integrated unit may fulfil the functions of several means recited in the claims. Any reference signs in the claims shall not be construed as limiting the respective claims concerned. The terms "first", "second", third", "a", "b", "c", and the like, when used in the description or in the claims are introduced to distinguish between similar elements or steps and are not necessarily describing a sequential or chronological order. Similarly, the terms "top", "bottom", "over", "under", and the like are introduced for descriptive purposes and not necessarily to denote relative positions. It is to be understood that the terms so used are interchangeable under appropriate circumstances and embodiments of the invention are capable of operating according to the present invention in other sequences, or in orientations different from the one(s) described or illustrated above.
Claims (14)
- A system (115, 118; 125, 128; 135, 138; 200) enabling alignment of a terminal truck (110; 120; 130) relative to a gantry crane (101-108, 150, 151), said terminal truck (110; 120; 130) comprising a tractor (111; 121; 131) and a trailer (112; 122; 132) holding at least one container (113; 123, 124; 133) to be picked up by said crane (101 - 108, 150, 151), said system (115, 118; 125, 128; 135, 138; 200) comprising:- a position determination unit (211, 212) configured to determine a tractor position for said tractor (111; 121; 131) relative to said crane (101-108, 150, 151);- a receiver (221, 222) with connectivity to an external system, said receiver (221, 222) being configured to receive from said external system container information indicative for the size of said at least one container (113; 123, 124; 133);- a distance measurement unit (213, 214) configured to measure a distance (117; 127; 137) between a reference point, line or plane (116; 126; 136) at said tractor (111; 121; 131) and a front surface of said at least one container (113; 123, 124; 133) based on reflective technology; and- a computing unit (223) coupled to said position determination unit (211, 212), said receiver (221, 222) and said distance measurement unit (213, 214), said computing unit (223) being configured to collect said tractor position, said container information, and said distance, and further being configured to generate therefrom driving instructions to enable positioning said at least one container (113; 123, 124; 133) in a predetermined aligned position relative to said crane (101-108, 150, 151).
- The system (115, 118; 125, 128; 135, 138; 200) according to claim 1, wherein said position determination unit (211, 212) comprises one or more micro location technology antenna, abbreviated MLT antenna, mounted on said tractor (111; 121; 131).
- The system (115, 118; 125, 128; 135, 138; 200) according to claim 1 or claim 2, wherein said distance measurement unit (213, 214) comprises an ultrasound emitter (213) and sensor (214).
- The system (115, 118; 125, 128; 135, 138; 200) according to claim 1 or claim 2, wherein said distance measurement unit comprises a light detection and ranging sensor, abbreviated Lidar sensor.
- The system (115, 118; 125, 128; 135, 138; 200) according to claim 1 or claim 2, wherein said distance measurement unit comprises a radio detection and ranging transmitter and receiver, abbreviated a radar transmitter and receiver.
- The system (115, 118; 125, 128; 135, 138; 200) according to one of claims 1-5, wherein said external system comprises a crane controller of said crane (101-108, 150, 151).
- The system (115, 118; 125, 128; 135, 138; 200) according to one of claims 1-5, wherein said external system comprises a terminal operating system, abbreviated TOS.
- The system (115, 118; 125, 128; 135, 138; 200) according to one of claims 1-5, wherein said external system comprises a yard management system, abbreviated YMS.
- The system (115, 118; 125, 128; 135, 138; 200) according to one of claims 1-8, wherein said container information comprises the type of said at least one container.
- The system (115, 118; 125, 128; 135, 138; 200) according to one of claims 1-8, wherein said container information comprises the size of said at least one container.
- The system (115, 118; 125, 128; 135, 138; 200) according to one of the preceding claims, wherein said distance is measured with an accuracy of 10 centimeters or shorter.
- The system (115, 118; 125, 128; 135, 138; 200) according to one of the preceding claims, wherein said position determination unit (211, 212) and said distance measurement unit (213, 214) are integrated in a single housing (115; 125; 135; 201).
- The system (115, 118; 125, 128; 135, 138; 200) according to claim 2, wherein said reference point, line or plane (116; 126; 136) corresponds to the center plane through an MLT antenna of said one or more MLT antenna.
- A method enabling alignment of a terminal truck (110; 120; 130) relative to a gantry crane (101-108, 150, 151), said terminal truck (110; 120; 130) comprising a tractor (111; 121; 131)and a trailer (112; 122; 132) holding at least one container (113; 123, 124; 133) to be picked up by said crane (101-108, 150, 151), said method comprising:- determining a tractor position for said tractor (111; 121; 131) relative to said crane (101-108, 150, 151);- receiving from an external system container information indicative for the size of said at least one container (113; 123, 124; 133);- measuring a distance (117; 127; 137) between a reference point, line or plane (116; 126; 136) at said tractor (111; 121; 131) and a front surface of said at least one container (113; 123, 124; 133) based on reflective technology; and- generating from said tractor position, said container information, and said distance driving instructions to enable positioning said at least one container (113; 123, 124; 133) in a predetermined aligned position relative to said crane (101-108, 150, 151).
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP18209868.1A EP3663250B1 (en) | 2018-12-03 | 2018-12-03 | A system and method for alignment of a terminal truck relative to a crane |
| PCT/EP2019/074563 WO2020114638A1 (en) | 2018-12-03 | 2019-09-13 | A system and method for alignment of a terminal truck relative to a crane |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP18209868.1A EP3663250B1 (en) | 2018-12-03 | 2018-12-03 | A system and method for alignment of a terminal truck relative to a crane |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3663250A1 true EP3663250A1 (en) | 2020-06-10 |
| EP3663250B1 EP3663250B1 (en) | 2021-10-06 |
Family
ID=64572234
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP18209868.1A Active EP3663250B1 (en) | 2018-12-03 | 2018-12-03 | A system and method for alignment of a terminal truck relative to a crane |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP3663250B1 (en) |
| WO (1) | WO2020114638A1 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113443387A (en) * | 2021-06-30 | 2021-09-28 | 上海西井信息科技有限公司 | Port unmanned container truck alignment method, device, equipment and storage medium |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113247769B (en) * | 2021-04-28 | 2023-06-06 | 三一海洋重工有限公司 | Method for positioning collector card, positioning system thereof and shore bridge |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2002034663A1 (en) * | 2000-10-27 | 2002-05-02 | Abb Ab | Chassis alignment system |
| US20130147640A1 (en) | 2011-04-13 | 2013-06-13 | David G. STOCKER | Container Handler Alignment System and Method |
| WO2018087141A1 (en) | 2016-11-08 | 2018-05-17 | Konecranes Global Corporation | Radio-location system for determining the location of a transportation vehicle for containers |
-
2018
- 2018-12-03 EP EP18209868.1A patent/EP3663250B1/en active Active
-
2019
- 2019-09-13 WO PCT/EP2019/074563 patent/WO2020114638A1/en active Application Filing
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2002034663A1 (en) * | 2000-10-27 | 2002-05-02 | Abb Ab | Chassis alignment system |
| US20130147640A1 (en) | 2011-04-13 | 2013-06-13 | David G. STOCKER | Container Handler Alignment System and Method |
| WO2018087141A1 (en) | 2016-11-08 | 2018-05-17 | Konecranes Global Corporation | Radio-location system for determining the location of a transportation vehicle for containers |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113443387A (en) * | 2021-06-30 | 2021-09-28 | 上海西井信息科技有限公司 | Port unmanned container truck alignment method, device, equipment and storage medium |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2020114638A1 (en) | 2020-06-11 |
| EP3663250B1 (en) | 2021-10-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US12043248B2 (en) | Precise truck parking method, device, and system in quayside container crane area | |
| US4309758A (en) | Driverless vehicle autoguided by light signals and three non-directional detectors | |
| US11987477B2 (en) | System and method for controlling mobile hoisting apparatus, server and mobile hoisting apparatus | |
| EP1964806B1 (en) | Positioning system for container handling equipment | |
| JP3085468B2 (en) | Container handling equipment and management system | |
| US10222808B2 (en) | Inspection system and method for performing inspections in a storage facility | |
| US9260276B2 (en) | Container handler alignment system and method | |
| US11643312B2 (en) | Vehicle-mounted device, cargo handling machine, control circuit, control method, and program thereof | |
| US20160313451A1 (en) | Techniques for positioning a vehicle | |
| US20200110410A1 (en) | Device and method for processing map data used for self-position estimation, mobile body, and control system for mobile body | |
| US20200264616A1 (en) | Location estimation system and mobile body comprising location estimation system | |
| EP0007789A2 (en) | Driverless vehicle carrying directional detectors auto-guided by light signals | |
| EP3315937A1 (en) | Gas detection device and gas detection method | |
| US11537140B2 (en) | Mobile body, location estimation device, and computer program | |
| CN111533051B (en) | Tray pose detection method and device, forklift and freight system | |
| KR20110086823A (en) | Container position measuring method and container position measuring device | |
| CN110998472A (en) | Mobile object and computer program | |
| CN111090087B (en) | Intelligent navigation machine, laser radar blind area compensation method and storage medium | |
| EP3663250B1 (en) | A system and method for alignment of a terminal truck relative to a crane | |
| JPWO2019054209A1 (en) | Map making system and map making device | |
| KR102446517B1 (en) | Unmanned transport vehicle capable of route driving in indoor and outdoor environments | |
| CN112578789A (en) | Moving body | |
| KR20080020187A (en) | Station location information providing system of container transportation vehicle | |
| CN114265375B (en) | System and method for storing and taking goods of flat truck by AGV | |
| US11256258B2 (en) | System and method for determining the position of a vehicle for automated driving on a site |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20201210 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20210630 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D |
|
| RIN1 | Information on inventor provided before grant (corrected) |
Inventor name: DE GEETER, JEF SIMON GASTON Inventor name: BOSSENS, JAN AMANDUS MICHEL MARIA |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP Ref country code: AT Ref legal event code: REF Ref document number: 1436071 Country of ref document: AT Kind code of ref document: T Effective date: 20211015 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602018024577 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: FI Ref legal event code: FGE |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: FP |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: TRGR |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 1436071 Country of ref document: AT Kind code of ref document: T Effective date: 20211006 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211006 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211006 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220106 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211006 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220206 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220207 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211006 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220106 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211006 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211006 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220107 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211006 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602018024577 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211006 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211006 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211006 Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211006 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211006 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211006 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211006 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20220707 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20211203 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20211203 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211006 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211006 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20211231 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20211231 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211006 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211006 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20181203 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20221203 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221203 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20231208 Year of fee payment: 6 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211006 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211006 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: BE Payment date: 20241107 Year of fee payment: 7 Ref country code: NL Payment date: 20241219 Year of fee payment: 7 Ref country code: FI Payment date: 20241220 Year of fee payment: 7 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20241223 Year of fee payment: 7 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SE Payment date: 20241224 Year of fee payment: 7 |