EP3554633B1 - Positionierhilfevorrichtung zur fokalen strahlentherapie - Google Patents
Positionierhilfevorrichtung zur fokalen strahlentherapie Download PDFInfo
- Publication number
- EP3554633B1 EP3554633B1 EP17818098.0A EP17818098A EP3554633B1 EP 3554633 B1 EP3554633 B1 EP 3554633B1 EP 17818098 A EP17818098 A EP 17818098A EP 3554633 B1 EP3554633 B1 EP 3554633B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- candidate
- catheter
- dwelling
- catheters
- positioning assistance
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000001959 radiotherapy Methods 0.000 title claims description 43
- 238000003780 insertion Methods 0.000 claims description 109
- 230000037431 insertion Effects 0.000 claims description 109
- 239000002131 composite material Substances 0.000 claims description 51
- 230000005855 radiation Effects 0.000 claims description 45
- 238000000034 method Methods 0.000 claims description 31
- 241000282326 Felis catus Species 0.000 claims description 11
- 238000003384 imaging method Methods 0.000 claims description 10
- 238000004590 computer program Methods 0.000 claims description 3
- 238000002725 brachytherapy Methods 0.000 description 15
- 238000005457 optimization Methods 0.000 description 14
- 238000010586 diagram Methods 0.000 description 13
- 238000011156 evaluation Methods 0.000 description 13
- 238000002679 ablation Methods 0.000 description 10
- 230000003044 adaptive effect Effects 0.000 description 8
- 206010028980 Neoplasm Diseases 0.000 description 6
- 210000002307 prostate Anatomy 0.000 description 6
- 238000002560 therapeutic procedure Methods 0.000 description 6
- 238000012545 processing Methods 0.000 description 5
- 238000013459 approach Methods 0.000 description 4
- 238000004422 calculation algorithm Methods 0.000 description 3
- 238000012937 correction Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 238000000608 laser ablation Methods 0.000 description 3
- 210000000056 organ Anatomy 0.000 description 3
- 210000000920 organ at risk Anatomy 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 238000002604 ultrasonography Methods 0.000 description 3
- 208000000236 Prostatic Neoplasms Diseases 0.000 description 2
- 230000006978 adaptation Effects 0.000 description 2
- 230000001186 cumulative effect Effects 0.000 description 2
- 230000001419 dependent effect Effects 0.000 description 2
- 210000004907 gland Anatomy 0.000 description 2
- 238000002595 magnetic resonance imaging Methods 0.000 description 2
- 239000011159 matrix material Substances 0.000 description 2
- 238000012544 monitoring process Methods 0.000 description 2
- 238000012887 quadratic function Methods 0.000 description 2
- 210000001519 tissue Anatomy 0.000 description 2
- 230000001960 triggered effect Effects 0.000 description 2
- 238000012285 ultrasound imaging Methods 0.000 description 2
- 239000010750 BS 2869 Class C2 Substances 0.000 description 1
- 206010006187 Breast cancer Diseases 0.000 description 1
- 208000026310 Breast neoplasm Diseases 0.000 description 1
- 241001465754 Metazoa Species 0.000 description 1
- 206010060862 Prostate cancer Diseases 0.000 description 1
- 210000003484 anatomy Anatomy 0.000 description 1
- 230000015556 catabolic process Effects 0.000 description 1
- 238000006731 degradation reaction Methods 0.000 description 1
- 230000008021 deposition Effects 0.000 description 1
- 238000004980 dosimetry Methods 0.000 description 1
- 230000002068 genetic effect Effects 0.000 description 1
- 238000003709 image segmentation Methods 0.000 description 1
- 239000007943 implant Substances 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 238000013152 interventional procedure Methods 0.000 description 1
- 238000012804 iterative process Methods 0.000 description 1
- 239000003550 marker Substances 0.000 description 1
- 238000003909 pattern recognition Methods 0.000 description 1
- 238000003908 quality control method Methods 0.000 description 1
- 230000002285 radioactive effect Effects 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 230000004083 survival effect Effects 0.000 description 1
Images





Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N5/00—Radiation therapy
- A61N5/10—X-ray therapy; Gamma-ray therapy; Particle-irradiation therapy
- A61N5/103—Treatment planning systems
- A61N5/1031—Treatment planning systems using a specific method of dose optimization
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N5/00—Radiation therapy
- A61N5/10—X-ray therapy; Gamma-ray therapy; Particle-irradiation therapy
- A61N5/1048—Monitoring, verifying, controlling systems and methods
- A61N5/1049—Monitoring, verifying, controlling systems and methods for verifying the position of the patient with respect to the radiation beam
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N5/00—Radiation therapy
- A61N5/10—X-ray therapy; Gamma-ray therapy; Particle-irradiation therapy
- A61N5/1001—X-ray therapy; Gamma-ray therapy; Particle-irradiation therapy using radiation sources introduced into or applied onto the body; brachytherapy
- A61N5/1007—Arrangements or means for the introduction of sources into the body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N5/00—Radiation therapy
- A61N5/10—X-ray therapy; Gamma-ray therapy; Particle-irradiation therapy
- A61N5/1048—Monitoring, verifying, controlling systems and methods
- A61N5/1071—Monitoring, verifying, controlling systems and methods for verifying the dose delivered by the treatment plan
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N5/00—Radiation therapy
- A61N5/10—X-ray therapy; Gamma-ray therapy; Particle-irradiation therapy
- A61N5/1048—Monitoring, verifying, controlling systems and methods
- A61N5/1049—Monitoring, verifying, controlling systems and methods for verifying the position of the patient with respect to the radiation beam
- A61N2005/1055—Monitoring, verifying, controlling systems and methods for verifying the position of the patient with respect to the radiation beam using magnetic resonance imaging [MRI]
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N5/00—Radiation therapy
- A61N5/10—X-ray therapy; Gamma-ray therapy; Particle-irradiation therapy
- A61N5/1048—Monitoring, verifying, controlling systems and methods
- A61N5/1049—Monitoring, verifying, controlling systems and methods for verifying the position of the patient with respect to the radiation beam
- A61N2005/1058—Monitoring, verifying, controlling systems and methods for verifying the position of the patient with respect to the radiation beam using ultrasound imaging
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N5/00—Radiation therapy
- A61N5/10—X-ray therapy; Gamma-ray therapy; Particle-irradiation therapy
- A61N5/1001—X-ray therapy; Gamma-ray therapy; Particle-irradiation therapy using radiation sources introduced into or applied onto the body; brachytherapy
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N5/00—Radiation therapy
- A61N5/10—X-ray therapy; Gamma-ray therapy; Particle-irradiation therapy
- A61N5/103—Treatment planning systems
- A61N5/1039—Treatment planning systems using functional images, e.g. PET or MRI
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H50/00—ICT specially adapted for medical diagnosis, medical simulation or medical data mining; ICT specially adapted for detecting, monitoring or modelling epidemics or pandemics
- G16H50/50—ICT specially adapted for medical diagnosis, medical simulation or medical data mining; ICT specially adapted for detecting, monitoring or modelling epidemics or pandemics for simulation or modelling of medical disorders
Definitions
- the present invention is in the field of focal radiation therapy, such as high intensity focused ultrasound (HIFU) ablation, radio frequency (RF) ablation, microwave ablation, laser ablation or High Dose Rate (HDR) brachytherapy. More specifically, it relates to a device and a method for assisting in positioning of catheters in a focal radiation therapy with respect to a pre-determined target volume and a given catheter insertion point.
- focal radiation therapy such as high intensity focused ultrasound (HIFU) ablation, radio frequency (RF) ablation, microwave ablation, laser ablation or High Dose Rate (HDR) brachytherapy. More specifically, it relates to a device and a method for assisting in positioning of catheters in a focal radiation therapy with respect to a pre-determined target volume and a given catheter insertion point.
- Focal radiation therapy such as high intensity focused ultrasound (HIFU) ablation, radio frequency (RF) ablation, microwave ablation, laser ablation or High Dose Rate (HDR) brachytherapy, etc. has shown to be a method of choice to treat tumors in different organs.
- HIFU high intensity focused ultrasound
- RF radio frequency
- microwave ablation microwave ablation
- laser ablation laser ablation
- HDR High Dose Rate
- brachytherapy is used to treat the tumor only, while sparing surrounding tissues.
- focal brachytherapy is aimed to be equally effective, while reducing therapy side effects.
- HDR brachytherapy has proven to have an excellent survival and local control rate and very limited side effects for the patient.
- HDR brachytherapy has shown to be a method of choice to treat prostate and breast cancers.
- so-called inverse planning methods are used for determining a treatment.
- target doses as well as constraints with respect organs at risk and importance factors for each are given.
- An optimization is then performed to find the treatment plan which best matches all the input criteria, thus optimizing a radiation dose, considering objectives for the target volume, as well as the constraints, which are usually expressed as a set of linear relations forming a linear system that is to be solved.
- US 2013/0102831 A1 relates to a real time radiation treatment planning system for use in effecting radiation therapy of a preselected anatomical portion of an animal body using hollow needles.
- the system may include a processing means processing configured to perform a three-dimensional imaging algorithm and a three-dimensional image segmentation algorithm, with respect to one or more specific organs within the pre-selected anatomical portion and with respect to the needles, for converting the image data obtained with an imaging means into a three-dimensional image of the anatomical portion, using at least one single or multi-objective anatomy-based genetic optimization algorithm.
- the processing means is arranged to determine in real time the optimal number and position of at least one of the needles, positions of energy emitting sources within the needles, and the dwell times of the energy emitting sources at the positions.
- the processing means is arranged to determine, based on three-dimensional image information, in real time the real needle positions and the dwell times of the energy emitting sources for the positions.
- a positioning assistance device for assisting in positioning of catheters in a focal radiation therapy with respect to a pre-determined target volume and a given catheter insertion point.
- the positioning assistance device comprises:
- the positioning assistance device of the first aspect of the present invention achieves positioning assistance in the form of a catheter positioning optimization (CPO) in combination with a dwelling time optimization (DTO) in grid-less free hand focal radiation therapy. It performs a direct parameter optimization (DPO) for providing positioning assistance information by iteratively toggling between CPO and DTO and thus determines the best set of catheter positions and corresponding dwelling times satisfying all clinical goals.
- CPO catheter positioning optimization
- DTO dwelling time optimization
- DPO direct parameter optimization
- the positioning assistance device does not need an initial plan to start from. As such the positioning assistance device assists in a plan-less, freehand placement of catheters, in which adaptation also occurs before actually placing the individual catheters.
- the positioning assistance device can propose an optimum position and guide the user to insert under an angle that has the best impact on the dose to be delivered.
- inserting a second needle be it at the same insertion point or in another insertion point, it can again indicate the best needle angulation and positioning.
- positioning assistance including orientation guidance and adaptive dose correction in the course of focal radiation therapy delivery are made possible.
- any tracked misplacements can be taken into account to adaptively re-optimize the remaining set of catheters and corresponding dwell times in order to recover dose accuracy, homogeneity and conformality.
- the proposed positioning assistance device ensures that efficient and accurate plans will be implemented for a prescribed clinical protocol, while reducing the workload for medical experts involved in an inverse planning process and catheter insertion.
- the positioning assistance device is preferably implemented for assistance in real-time, which is supported by additional features provided in the context of preferred embodiments described herein below.
- the catheter pre-selection unit is additionally configured to receive inserted catheter data, which is associated with all catheters already inserted into the target volume and which is indicative of respective inserted-catheter positions, respective dwelling positions of radiation sources, and respective dwelling times associated with the dwelling positions of the catheters already inserted; determine a current radiation dose value associated with the dwelling positions and dwelling times associated with the catheters already inserted; and to determine, for the given candidate catheter, the gradient of the composite constraint function additionally using the current radiation dose value associated with the catheters already inserted.
- Real-time operation is preferably supported in this embodiment of the positioning assistance device by the catheter pre-selection unit being additionally configured to receive three-dimensional image data of the target volume to be exposed to the radiation and of one or more catheters currently inserted into the target volume, and to determine the catheter data of catheters currently inserted from the image data.
- a particularly advantageous handling of misplaced catheters in the context of the positioning assistance device is achieved in embodiments, wherein the catheter pre-selection unit is additionally configured, upon detecting a misplaced catheter already inserted into the target volume by detecting a difference between the positioned catheter data determined from the image data and the associated target catheter position previously provided for this catheter as an output by the positioning assistance control unit, to add the misplaced catheter to the candidate catheters, and wherein the positioning assistance control unit is additionally configured to determine and provide adapted dwelling position information and adapted dwelling-time information for the misplaced catheter.
- the candidate pre-selection unit is suitably additionally configured to determine for the given candidate catheter, the gradient of the composite constraint function additionally using the current radiation dose associated with the catheters already inserted as (equation (3)):
- the positioning assistance device is in some embodiment provided with additional functionality for assisting in the selection a set of candidate insertion points.
- the positioning assistance device further comprises a candidate insertion point providing unit, which is configured to provide candidate insertion point data associated with the given target volume and defining candidate insertion points by a respective candidate insertion point position; and an insertion point selection unit, which is configured to
- the candidate insertion point providing unit is preferably additionally configured to receive three-dimensional image data of the target volume to be exposed to the radiation; determine a two-dimensional axial projection of the target volume onto a predetermined projection plane on or in a subject; determine a geometrical center of mass of the axial projection of the target volume; determine the candidate insertion points as grid points of a pre-determined two-dimensional grid having the center of mass as a center point.
- a focal radiation therapy arrangement implementing the present invention comprises at least an imaging device configured to provide three-dimensional image data of a target volume to be exposed to the radiation and of one or more catheters currently inserted into the target volume; a catheter positioning assistance device according to the first aspect of the invention or one of its embodiments, which is configured to receive the image data and to provide the next target catheter position in a form registered with respect to the image data.
- Some embodiments of the focal radiation therapy arrangement further comprise a catheter insertion robot, which is configured to receive the target insertion point and the target catheter position from the positioning assistance device, and to insert a catheter into a subject using the received target insertion point and the target catheter position.
- a catheter insertion robot which is configured to receive the target insertion point and the target catheter position from the positioning assistance device, and to insert a catheter into a subject using the received target insertion point and the target catheter position.
- a positioning assistance method for assisting in positioning of catheters in a focal radiation therapy with respect to a pre-determined target volume and a given catheter insertion point.
- the positioning assistance method comprises:
- the positioning assistance method of the second aspect shares the advantages of the positioning assistance device of the first aspect of the invention. It is particularly suited for automated processing, be it in the form an implementation of executable software on programmable processor hardware, or in the form of execution by application specific integrated circuitry.
- a computer program comprising executable code for executing the method of claim of the third aspect or one of its embodiment when executed by a processor of a computer.
- positioning assistance device of claim 1 the focal radiation therapy arrangement of claim 9, the positioning assistance method of claim 11, and the computer program of claim 13 have similar and/or identical preferred embodiments, in particular, as defined in the dependent claims.
- Fig. 1 is a schematic block diagram of a positioning assistance device 100 for assisting in positioning of catheters in a focal radiation therapy with respect to a pre-determined target volume and a given catheter insertion point, in accordance with an embodiment of the present invention.
- Focal radiation therapy is used to treat a tumor only, while sparing surrounding tissue.
- focal radiation therapy such as for example focal brachytherapy
- the present embodiment of a positioning assistance device 100 is designed in particular for application in grid-less adaptive focal radiation therapy, where human free hand, a robotic arm or a combination of both is used to implant catheters and deliver dose at different dwelling positions.
- the positioning assistance device 100 has a candidate catheter providing unit 102.
- the candidate catheter providing unit is configured to provide candidate catheter data.
- the candidate catheter data defines candidate catheters by a respective candidate inserted-catheter position, respective candidate dwelling positions of radiation sources inside a given candidate catheter, and respective associated candidate dwelling times.
- the candidate inserted-catheter position defines a candidate target position of a catheter after insertion. It suitably describes this potential inserted-catheter position in terms of a given coordinate system that also serves for describing a position and extension of a target volume to be treated by the focal radiation therapy.
- the target volume typically describes the position and extension of a tumor to be treated.
- the candidate dwelling positions of radiation sources inside a given candidate catheter describe candidate locations of predetermined radiation sources (such as radioactive seeds) inside the subject catheter.
- the dwelling positions are suitable defined in terms of the same coordinate system as the candidate inserted-catheter position and the target volume.
- the candidate dwelling times are associated with the respective radiation sources and define a potential limited time span of radiation treatment of
- Such candidate catheter data is associated with a given catheter insertion point.
- This catheter insertion point forms an input to the candidate catheter providing unit and is thus taken as a given in the present embodiment.
- the catheter insertion point can be set by free-hand human control and is provided to the candidate catheter providing unit as catheter insertion point data in terms of the mentioned coordinate system using known technical solutions such as a suitable imaging modality for monitoring the current position of catheters in a focal radiation therapy arrangement, in combination with a registration unit (not shown in Fig. 1 ).
- the candidate catheter providing unit provides candidate catheter data defining a plurality of candidate catheters, of which only a predetermined number are to be selected by the positioning assistance device 100.
- the number of catheters to be selected can be pre-set globally or individually in each catheter selection step by manual input.
- the catheter selection involves a pre-selection which is performed by a catheter pre-selection unit 104.
- the candidate catheter data of each of the current candidate catheters is fed into a gradient evaluation unit 106 of the catheter pre-selection unit 104.
- the gradient evaluation unit 106 is pre-programmed by prior input with a composite constraint function.
- the composite constraint function combines at least two linear constraints representing clinical objectives with respect to radiation dose governing the focal radiation therapy for a given patient. In other words, these linear constraints represent clinical objectives for the target volume, as well as for organs at risk in the process of focal radiation therapy.
- the linear constraints are defined and provided as an input by a planner who takes care to translate the prescribed clinical protocol, i.e., the given list of prescribed clinical goals, to corresponding dose-based mathematical objective functions, which, e.g., form convex quadratic functions.
- a set of a number m of linear constraints representing clinical objectives can be represented mathematically as functions of a dose voxel vector d in the form f 1 d , ... , f m d : R n ⁇ R , wherein n describes the number of dose voxel positions.
- M the well-known dose rate influence matrix.
- the matrix M is neglected in many formulas, and only explicitly exposed where needed.
- the gradient evaluation unit 106 is configured to ascertain and provide as an output a gradient value with respect to dwelling time of a composite constraint function, using the current candidate dwelling times at associated current candidate dwelling positions of the candidate catheter.
- the catheter pre-selection unit 104 further has a pre-selection control unit 108, which is configured to pre-select a predetermined number of one or more candidate catheters from the candidate catheters, namely that or those, which are associated with one or more steepest descent values of the gradient among the candidate catheters.
- a pre-selection control unit 108 which is configured to pre-select a predetermined number of one or more candidate catheters from the candidate catheters, namely that or those, which are associated with one or more steepest descent values of the gradient among the candidate catheters.
- the gradient evaluation unit 106 of the candidate pre-selection unit 104 determines, for the given candidate catheter, the gradient of the composite constraint function in a different way. It additionally receives inserted catheter data, which is associated with all catheters already inserted into the target volume and which is indicative of respective inserted-catheter positions, respective dwelling positions of radiation sources, and respective dwelling times associated with the dwelling positions of the catheters already inserted. It determines a current radiation dose value associated with the dwelling positions and dwelling times associated with the catheters already inserted. It further determines, for the given candidate catheter, the gradient of the composite constraint function additionally using the current radiation dose value associated with the catheters already inserted.
- the gradient value is in this case determined as (equation (3))
- the pre-selected candidate catheter(s) form an intermediate output of the catheters positioning optimization (CPO).
- CPO catheters positioning optimization
- the positioning assistance device 100 goes further in evaluation before providing positioning assistance output. It additionally takes into account a dwelling times optimization (DTO) to find the best candidate catheter.
- DTO dwelling times optimization
- the pre-selected candidate catheter data are thus provided by the catheter pre-selection unit 104 as an input to a dwelling-time pre-selection unit 110.
- the dwelling-time pre-selection unit 110 is configured to ascertain and pre-select, using the current pre-selected candidate catheters, those current candidate dwelling times for the respective candidate dwelling positions, which achieve a minimum of a scalar composite constraint function of dwelling time combining the at least two linear constraints.
- the dwelling-time pre-selection unit ascertains the current candidate dwelling times for the respective candidate dwelling positions in a different way, namely by identifying those candidate dwelling times which achieve a minimum of the scalar composite constraint function (equation (4))
- a positioning assistance control unit 112 receives the currently determined gradient value of the composite constraint function for the at least one of the pre-selected candidate catheters, as determined by the catheter pre-selection unit. It checks whether the catheter pre-selection unit 106 has provided a non-negative value of the gradient of the composite constraint function for the one or more candidate catheters. If this is not the case, the positioning assistance control unit 112 triggers a next iteration cycle of the catheters positioning optimization (CPO) by the catheter pre-selection unit 106, and subsequent dwelling times optimization (DTO) by the dwelling-time pre-selection unit 110.
- CPO catheters positioning optimization
- DTO dwelling times optimization
- a positioning assistance output indicative a next target catheter position as that of the at least one current pre-selected candidate catheter is provided. Otherwise, the positioning assistance control unit 112 alternatingly drives operation of the catheter pre-selection unit 104 and the dwelling-time pre-selection unit 110 over a plurality of iteration cycles.
- This iterative process can be repeated for determining a next catheter to be placed. It is stopped as soon as the desired maximum number of catheters will be reached, and/or as soon as the planner's prescribed dose-based quality is achieved.
- only one candidate catheter is pre-selected by the pre-selection unit and thus positioning assistance for only one catheter is eventually provided by the positioning assistance device 100.
- other embodiments pre-select more than one new catheter position per run. This reduces the number of iteration cycles needed to find the best solution, to the expense of some degradations in terms of dose accuracy.
- the positioning assistance device 100 determines a set of procedure parameters in terms of catheter positioning and dwelling time that has been optimized in an iterative manner, toggling between optimization of candidate catheter positions and radiation source dwelling times.
- the candidate catheter pre-selection unit 104 keeps dwelling times fixed and pre-selects the most suitable candidate catheter according to the steepest gradient descent criterion. Then, one or more pre-selected catheter positions are kept fixed and the most suitable dwelling times are pre-selected, and so on, until the at least one current pre-selected catheter achieves a non-negative value of the gradient of the composite constraint function.
- Candidate catheter data and associated dwelling times can be initialized by exploiting a-priori knowledge. If no such initialization is available, a completely empty initial setting is used. The described iterative strategy assists in positioning catheter by catheter and thus populates the set of catheters used.
- Fig. 2 shows a further embodiment of a positioning assistance device 200 with additional misplaced-catheter handling.
- the structure and operation of the positioning assistance device 200 are quite similar to the embodiment of Fig. 1 .
- the following description therefore focuses on additional and distinguishing features. Otherwise, reference is made to the description Fig. 1 .
- the three-digit reference labels of corresponding units in the embodiments of Figs. 1 and 2 have identical last two digits and differ only in the first digit, which is "2" in Fig. 2 and " 1 " in Fig. 1 .
- the catheter pre-selection unit 204 of the positioning assistance device 200 additionally comprises an image evaluation unit 216, which is configured to receive three-dimensional image data of the target volume to be exposed to the radiation including one or more catheters currently inserted into the target volume.
- the catheter image evaluation unit is configured to determine the catheter data of the catheters currently inserted from the image data.
- the image data is provided in registered form with respect to the common coordinate system mentioned earlier. If not, the image evaluation unit 216 is configured to perform the registration using methods known per se.
- the position data of the catheters currently inserted can be determined using known pattern recognition solutions applied to contrast features of the catheters showing in the image data.
- the catheter position determination can be made particularly easy and accurate by using marker features placed at pre-determined positions on the inserted catheters and showing as contrast features in the image data.
- the image evaluation unit 216 compares the inserted catheter position data thus determined with previously determined target catheter position provided as the positioning assistance output by the positioning assistance control unit 212. Upon detecting a misplaced catheter already inserted into the target volume by detecting a difference between the inserted catheter position data determined from the image data and the associated target catheter position data previously provided for this catheter as an output by the positioning assistance control unit 212, the image evaluation unit adds the misplaced catheter to the candidate catheters to be provided by the candidate catheter providing unit 202.
- the positioning assistance control 212 unit is additionally configured to determine and provide adapted dwelling position information and adapted dwelling-time information for the misplaced catheter.
- the structure and operation of the positioning assistance device 200 resembles that of the positioning assistance device 100 of Fig. 1 .
- Fig. 3 is a schematic block diagram of a further embodiment of a positioning assistance device 300 with misplaced-catheter handling (as in the embodiment of Fig. 2 ) and additional insertion point positioning assistance.
- the structure and operation of the positioning assistance device 300 are quite similar to the embodiment of Fig. 2 . The following description therefore focuses on additional and distinguishing features. Otherwise, reference is made to the description of Figs. 1 and. To allow an easier comparison, the three-digit reference labels of corresponding units in the embodiments of Figs. 2 and 3 have identical last two digits and differ only in the first digit, which is "2" in Fig. 2 and " 3 " in Fig. 3 .
- the positioning assistance device 300 further provides positioning guidance in the selection of an insertion point.
- a candidate insertion point providing unit 318 is configured to provide candidate insertion point data associated with the given target volume and defining candidate insertion points by a respective candidate insertion point position with respect to the common coordinate system (, assuming here, for simplicity, a fixed patient position).
- the provision of the candidate insertion points by the candidate insertion point providing unit 318 is in a simple implementation based on an initial user input of an initial candidate insertion position and adds a set of regularly spaced grid points of further candidate insertion points around the initial candidate insertion position.
- the candidate insertion point providing unit 318 is configured to receive the three-dimensional image data of the target volume to be exposed to the radiation, which image data is also provided to the catheter pre-selection unit 304 of the positioning assistance device 300.
- the candidate insertion point providing unit 318 determines a geometrical center of mass of the axial projection of the target volume. It then determines the candidate insertion points as grid points of a pre-determined two-dimensional grid having the center of mass as a center point.
- An insertion point selection unit 320 has a gradient weight determining unit 322 that is configured to receive the set of candidate insertion points and to request and receive, for each of the candidate insertion points, a respective set of candidate catheters from the candidate catheter providing unit 302.
- the gradient weight determining unit 322 ascertains and provides for each candidate insertion point a sum over all candidate catheters of the gradients with respect to dwelling time of the composite constraint functions, using the candidate insertion point data and the candidate catheter data.
- a gradient cumulative weight g r is calculated by the gradient weight determining unit 322.
- r and c represent the indices of the current candidate insertion point and current candidate catheter, respectively.
- N cat r is the total number of candidate catheters spilling out from the candidate insertion point r.
- g c has been defined earlier within this specification in equations (1) and (3).
- equation (3) for g c is applicable that includes the dose for the given insertion point(s) already in use.
- the structure and operation of the positioning assistance device 300 resembles that of the positioning assistance device 200 of Fig. 2 .
- Fig. 4 is a schematic block diagram of a focal radiation therapy arrangement 400 according to an embodiment of the present invention.
- the focal radiation therapy arrangement 400 comprises an imaging device 402 configured to provide three-dimensional image data of a target volume to be exposed to the radiation and of one or more catheters currently inserted into the target volume.
- the imaging device 402 is suitably a magnetic resonance imaging device or an ultrasound imaging device, or a device combining both mentioned imaging modalities.
- the focal radiation therapy arrangement 400 further comprises a catheter positioning assistance device 404 according one of the embodiments previously described in the context of the description of Figs. 2 or 3 .
- the catheter positioning assistance device 404 is configured to receive the image data and to provide the next target catheter position in a form registered with respect to the image data.
- the focal radiation therapy arrangement 400 further comprises a catheter insertion robot, which is configured to receive the target insertion point and the target catheter position from the positioning assistance device, and to insert a catheter into a subject using the received target insertion point and the target catheter position.
- a catheter insertion robot which is configured to receive the target insertion point and the target catheter position from the positioning assistance device, and to insert a catheter into a subject using the received target insertion point and the target catheter position.
- positioning assistance can be provided to a human expert with respect to the positioning of a catheter insertion point (using the embodiment of Fig. 3 ) and for selecting and positioning the individual catheters using a given insertion point in free-hand operation, or to a robotic arm.
- the embodiment of Fig. 2 can be used.
- the iterative approach described earlier is used to assist in positioning the best set of catheters.
- a maximum number of catheters to deliver via each insertion point could be set by the user via a suitable GUI.
- New implanted catheters are continuously tracked by their 3-D position in real-time using the imaging device 402.
- these tracked misplacements can be taken into account to adaptively re-optimize the remaining set of catheters and corresponding dwell times in order to re-establish dose accuracy, homogeneity and conformality.
- the proposed positioning assistance can thus be applied to optimize grid-less free-hand and/or MR-based adaptive focal therapy.
- Large efficiency gains e.g., in terms of optimal insertion points and optimal number of selected catheters, adaptive delivered dose correction, real-time orientation guidance, real-time interaction and robust quality control on the clinical focal therapy planning process are achieved.
- the application field covers brachytherapy, in particular high dose rate (HDR) brachytherapy and/or thermal ablations procedure.
- HDR high dose rate
- Fig. 5 is a flow diagram of an embodiment of a positioning assistance method 500 for assisting in positioning of catheters in a focal radiation therapy with respect to a pre-determined target volume and a given catheter insertion point.
- the flow diagram of Fig. 5 provides an overview of the method, which comprises a candidate catheter providing stage 502, in which candidate catheter data associated with the given catheter insertion point and defining candidate catheters by a respective candidate inserted-catheter position, respective candidate dwelling positions of radiation sources inside a given candidate catheter, and respective associated candidate dwelling times are provided.
- a predetermined number of one or more candidate catheters from the candidate catheters is pre-selected. The selection is based on finding the candidate catheter with a steepest descent value of a gradient with respect to dwelling time of a composite constraint function for each current candidate catheter. Additional detail of the process steps preformed in the pre-selection stage 504 will be described in the following with reference to Fig. 6 , which is a flow diagram showing more detail of step 504 in the method of Fig. 5 .
- the candidate catheter data for a given insertion point are received in a step 504.1 from the candidate catheter providing stage 502. This data comprises the current candidate dwelling times at associated current candidate dwelling positions of the respective candidate catheter.
- the gradient g c is determined (definition cf. hereinabove) for a given candidate catheter in step 504.2.
- step 504.3 it is checked whether all the gradient g c has been determined for all candidate catheters received in step 504.1. If that is not the case, step 504.2 is repeated with the next candidate catheter data.
- step 504.4 that candidate catheter or a predetermined number of candidate catheters from the set of candidate catheters are identified in step 504.4, which are associated with a steepest descent value of the gradient among the candidate catheters, i.e., with a negative value of g c having the highest amount.
- the candidate catheter thus identified data is output to a subsequent dwelling-time pre-selection stage 506 in a step 504.5.
- a positioning assistance controlling stage 508 is additionally performed, comprising alternatingly driving operation of the catheter pre-selection stage and the dwelling-time pre-selection stage over a plurality of iteration cycles until detecting that in a current iteration cycle the catheter pre-selection unit has provided a non-negative value of the gradient of the composite constraint function for at least one of the candidate catheters. If that is the case, an output indicative a next target catheter position as that of the at least one current pre-selected candidate catheter is provided in a subsequent step 510. Further detail of the positioning assistance controlling stage 508 of the method 500 will be described with reference to Fig. 7 below.
- the positioning assistance controlling stage 508 comprises receiving, in a step 508.1, the pre-selected candidate catheter data provided by the catheter pre-selection stage 504, and the pre-selected dwelling time values provided by the dwelling-time pre-selection stage 506. Subsequently, the gradient g c of the composite constraint function are determined for the given set of pre-selected dwelling times in a step 508.2.
- step 508.2 It is then determined in a step 508.2 whether any of the gradient values g c of the composite constraint function for the candidate catheters exhibits a non-negative value. If that is not the case, the method branches to a step 508.4, in which a new iteration cycle of performing the catheter pre-selection stage 504 and the dwelling time pre-selection stage is triggered, followed by performing step 508.1 again to receive the pre-selected candidate catheter data and candidate dwelling times after the triggered iteration cycle has been performed.
- the associated candidate catheter data is selected for output as positioning assistance information.
- an efficient direct parameter optimization (DPO) approach in which a dosimetry gradient-based iterative greedy technique is applied to determine positioning assistance information for catheter insertion in focal radiation therapy, by toggling between optimization of candidate catheter positions and radiation source dwelling times.
- the insertion point may be directly selected by the human expert.
- additional imaging modalities such as magnetic resonance imaging or ultrasound imaging, the method enables real-time orientation guidance and adaptive dose correction in the course of treatment delivery.
- potential real-time tracked misplacements can be taken into account to adaptively re-optimize the remaining set of catheters and corresponding dwelling times in order to re-establish optimal dose accuracy, homogeneity and conformality.
- the provided devices and methods can be applied to focal radiation therapy, such as high intensity focused ultrasound (HIFU) ablation, radio frequency (RF) ablation, microwave ablation, laser ablation or High Dose Rate (HDR) brachytherapy.
- focal radiation therapy such as high intensity focused ultrasound (HIFU) ablation, radio frequency (RF) ablation, microwave ablation, laser ablation or High Dose Rate (HDR) brachytherapy.
- HIFU high intensity focused ultrasound
- RF radio frequency
- microwave ablation microwave ablation
- laser ablation laser ablation
- HDR High Dose Rate
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- General Health & Medical Sciences (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- Pathology (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Radiation-Therapy Devices (AREA)
- Apparatus For Radiation Diagnosis (AREA)
- Surgical Instruments (AREA)
- Media Introduction/Drainage Providing Device (AREA)
- Laser Surgery Devices (AREA)
Claims (12)
- Eine Positionierhilfe für das Positionieren von Kathetern bei einer fokalen Strahlungstherapie in Bezug auf ein vordefiniertes Zielvolumen und einer gegebenen Kathetereinstichstelle, wobei die Positionierhilfe Folgendes umfasst:ein Bereitstellungsvorrichtung für den Katheterkandidaten, die die Katheterkandidatendaten für die gegebene Kathetereinstichstelle bereitstellt und die Katheterkandidaten anhand der entsprechenden Einfügeposition des Katheterkandidaten, der entsprechenden Dauerkandidatenpositionen der Strahlungsquellen in einem gegebenen Katheterkandidaten und der entsprechend zugeordneten Verweildauer des Kandidaten definiert;eine Katheter-Vorauswahlvorrichtung, die einen Gradienten für die Verweildauer einer kombinierten Bedingungsfunktion für die einzelnen aktuellen Katheterkandidaten gewährleistet und bereitstellt. Hierfür werden die aktuellen Verweildauern der Kandidaten an den zugeordneten aktuellen Dauerpositionen des aktuellen Kandidaten unter den Katheterkandidaten herangezogen, wobei die kombinierte Bedingungsfunktion mindestens zwei lineare Bedingungen kombiniert, die den klinischen Zielsetzungen in Bezug auf die Strahlungsdosis der fokalen Strahlungstherapie entsprechen; und die zudem vorab eine vordefinierte Anzahl von mindestens einem der Katheterkandidaten auswählt, die für die Gradienten der Katheterkandidaten den steilsten Abstiegswert aufweist;eine Verweildauer-Vorauswahlvorrichtung, die anhand der aktuellen vorausgewählten Katheterkandidaten diejenigen Verweildauern der Katheterkandidaten für die entsprechenden Dauerpositionen der Kandidaten vorab auswählt und gewährleistet, die das Minimum einer skalaren kombinierten Bedingungsfunktion für die Verweildauer erfüllen, die die mindestens zwei linearen Bedingungen kombiniert;eine Steuerungseinheit der Positionierhilfe, die über mehrere Iterationszyklen abwechselnd die Katheter-Vorauswahlvorrichtung und die Verweildauer-Vorauswahlvorrichtung aktiviert, und die eine Ausgabe mit der nächsten Katheterzielposition als diejenige des mindestens einen aktuellen vorausgewählten Katheterkandidaten bereitstellt, wenn erkannt wird, dass die Katheter-Vorauswahlvorrichtung für mindestens einen der Katheterkandidaten im aktuellen Iterationszyklus einen nicht negativen Wert für den Gradienten der kombinierten Bedingungsfunktion bereitgestellt hat.
- Die Positionierhilfe gemäß Anspruch 1, wobei die Katheter-Vorauswahlvorrichtung zudem folgende Schritte durchführt:Abrufen der Daten für die eingeführten Katheter, die allen bereits in das Zielvolumen eingeführten Kathetern zugeordnet sind, und die die entsprechenden Positionen der eingeführten Katheter, die entsprechenden Dauerpositionen der der Strahlungsquellen und die entsprechenden Verweildauern der Dauerpositionen der bereits eingeführten Katheter angeben;Ermitteln eines aktuellen Strahlungsdosiswerts für die Dauerpositionen und die Verweildauern der bereits eingeführten Katheter; undfür den Katheterkandidaten Ermitteln des Gradienten der kombinierten Bedingungsfunktion, wobei zudem der Strahlungsdosiswert für die bereits eingeführten Katheter herangezogen wird.
- Die Positionierhilfe gemäß Anspruch 2, wobei die Katheter-Vorauswahlvorrichtung zudem folgende Schritte durchführt:Abrufen der dreidimensionalen Bilddaten für das der Strahlung auszusetzende Zielvolumen sowie für mindestens einen aktuell in das Zielvolumen eingeführten Katheter, undErmitteln der Katheterdaten der aktuell eingeführten Katheter anhand der Bilddaten.
- Die Positionierhilfe gemäß Anspruch 3, wobei die Katheter-Vorauswahlvorrichtung zudem folgende Schritte durchführt:Hinzufügen eines falsch positionierten Katheters zu den Katheterkandidaten, wenn ein falsch positionierter, bereits in das Zielvolumen eingeführter Katheter ermittelt wird, indem eine Differenz zwischen den Bilddaten für den positionierten Katheter und der zuvor für diesen Katheter als Ausgabe der Steuerungseinheit der Positionierhilfe bereitgestellten Zielkatheterposition erkannt wurde, und wobeidie Steuereinheit der Positionierhilfe für den falsch positionierten Katheter zudem Dauerpositions- und angepasste Verweildauerdaten ermittelt und bereitstellt.
- Die Positionierhilfe gemäß Anspruch 1, wobei die Katheter-Vorauswahlvorrichtung folgende Schritte durchführt:
Berechnen des Gradienten gc für die Verweildauer der kombinierten Bedingungsfunktion für die einzelnen aktuellen Katheterkandidaten als: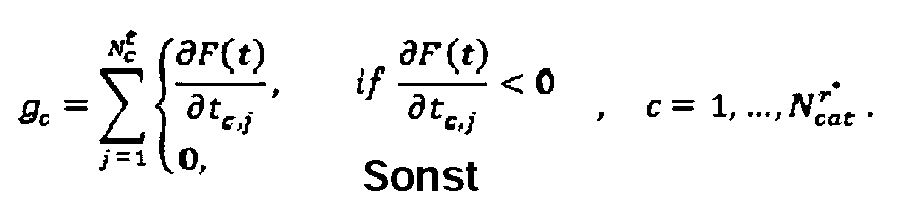 c der Index für das Identifizieren des entsprechenden Katheters ist,Nt c der Gesamtzahl der Dauerpositionen des Katheters c-th entspricht,t der Verweildauervektor der Verweildauer an den Dauerpositionen ist,j der Index für das Identifizieren der entsprechenden Verweildauerposition ist,r* der Index für das Identifizieren der entsprechenden Einstichstelle ist,Nr* cat der Gesamtzahl der divergenten Katheter entspricht, die die aktuelle Einstichstelle passieren,
c der Index für das Identifizieren des entsprechenden Katheters ist,Nt c der Gesamtzahl der Dauerpositionen des Katheters c-th entspricht,t der Verweildauervektor der Verweildauer an den Dauerpositionen ist,j der Index für das Identifizieren der entsprechenden Verweildauerposition ist,r* der Index für das Identifizieren der entsprechenden Einstichstelle ist,Nr* cat der Gesamtzahl der divergenten Katheter entspricht, die die aktuelle Einstichstelle passieren, i der Index für das Identifizieren des entsprechenden linearen Bedingung ist,m der Gesamtzahl der linearen Bedingungen entspricht, fi(t) einer Reihe von linearen Bedingungen entspricht, die den klinischen Zielsetzungen entsprechen, die als Funktionen der Verweildauern t der entsprechenden Strahlunsgquelle des entsprechenden Katheters gegeben sind, undwi Gewichtungsfaktoren sind, die die Gewichtung einer linearen Bedingung angeben; und wobeidie Verweildauer-Vorauswahlvorrichtung die aktuellen Verweildauern der Kandidaten für die entsprechenden Dauerpositionen der Kandidaten gewährleistet, die das Minimum der skalaren kombinierten Bedingungsfunktion
i der Index für das Identifizieren des entsprechenden linearen Bedingung ist,m der Gesamtzahl der linearen Bedingungen entspricht, fi(t) einer Reihe von linearen Bedingungen entspricht, die den klinischen Zielsetzungen entsprechen, die als Funktionen der Verweildauern t der entsprechenden Strahlunsgquelle des entsprechenden Katheters gegeben sind, undwi Gewichtungsfaktoren sind, die die Gewichtung einer linearen Bedingung angeben; und wobeidie Verweildauer-Vorauswahlvorrichtung die aktuellen Verweildauern der Kandidaten für die entsprechenden Dauerpositionen der Kandidaten gewährleistet, die das Minimum der skalaren kombinierten Bedingungsfunktion erfüllen, wobei die vordefinierten oberen und unteren Grenzwerte der Verweildauer berücksichtigt werden.
erfüllen, wobei die vordefinierten oberen und unteren Grenzwerte der Verweildauer berücksichtigt werden. - Die Positionierhilfe gemäß Anspruch 2 und 5,
wobei für den Fall, dass mindestens ein Katheter bereits eingeführt ist,
die Kandidaten-Vorauswahlvorrichtung zudem für den jeweiligen Katheterkandidaten den Gradienten der kombinierten Bedingungsfunktion ermittelt, wobei zudem die Strahlungsdosis für die bereits eingeführten Katheter als herangezogen wird. M0, M1,... Mn den Dosisleistungs-Einflusskoeffizienten der bereits eingeführten Katheter des Index n=0,1, ...., n entsprechen,t0, t1, ... tn den Verweildauern der bereits eingeführten Katheter des Index n=0,1, ...., n entsprechen; und wobeidie Verweildauer-Vorauswahlvorrichtung die aktuellen Verweildauern der Kandidaten für die entsprechenden Dauerpositionen der Kandidaten gewährleistet, die das Minimum der skalaren kombinierten Bedingungsfunktion
M0, M1,... Mn den Dosisleistungs-Einflusskoeffizienten der bereits eingeführten Katheter des Index n=0,1, ...., n entsprechen,t0, t1, ... tn den Verweildauern der bereits eingeführten Katheter des Index n=0,1, ...., n entsprechen; und wobeidie Verweildauer-Vorauswahlvorrichtung die aktuellen Verweildauern der Kandidaten für die entsprechenden Dauerpositionen der Kandidaten gewährleistet, die das Minimum der skalaren kombinierten Bedingungsfunktion
- Die Positionierhilfe gemäß Anspruch 1,
wobei diese zudem über Folgendes verfügt: eine Vorrichtung zum Bereitstellen der Kandidateneinführstelle verfügt, die Daten für die Kandidateneinführstelle für das jeweilige Zielvolumen bereitstellt und anhand der Position der entsprechenden Kandidateneinführstelle Kandidateneinführstellen definiert,;
eine Einführstellen-Auswahlvorrichtung, die folgende Schritte durchführt:Anfordern und Abrufen eines entsprechenden Satzes von Katheterkandidaten von der Bereitstellungsvorrichtung für Katheterkandidaten für die einzelnen Kandidateneinführstellen;Gewährleisten und Bereitstellen einer Summe für alle Katheterkandidaten der Gradienten im Hinblick auf die Verweildauer der kombinierten Bedingungsfunktionen für die einzelnen Kandidateneinführstellen unter Berücksichtigung der Daten für die Kandidateneinführstellen sowie für die Katheterkandidaten; undAuswählen derjenigen Einführstelle unter den Kandidateneinführstellen als nächste Einführstelle, der unter den Kandidateneinführstellen der steilste Abstiegswert der Summe aller Katheterkandidaten der Gradienten zugeordnet ist. - Die Positionierhilfe gemäß Anspruch 7,
wobei die Vorrichtung zum Bereitstellen der Kandidateneinführstelle folgende Schritte durchführt:Abrufen der dreidimensionalen Bilddaten für das der Strahlung auszusetzende Zielvolumen;Ermitteln einer zweidimensionalen axialen Projektion des Zielvolumens auf eine vordefinierte Projektionsfläche auf oder im Objekt;Ermitteln der geometrischen Mitte der Masse der axialen Projektion des Zielvolumens;Ermitteln der Kandidateneinführstellen als Rasterpunkte eines vordefinierten zweidimensionalen Rasters, dessen Zentrum die Mitte der Masse bildet. - Eine Anordnung für eine fokale Strahlungstherapie, die Folgendes umfasst:ein Bildgebungsgerät zum Bereitstellen der dreidimensionalen Bilddaten für das der Strahlung auszusetzende Zielvolumen sowie für mindestens einen aktuell in das Zielvolumen eingeführten Katheter;eine Katheter-Positionierhilfe gemäß Anspruch 1,die die Bilddaten abruft und die nächste Zielkatheterposition in einer im Hinblick auf die Bilddaten erfassten Form abruft.
- Die Anordnung für eine fokale Strahlungstherapie gemäß Anspruch 9,
die zudem einen Kathetereinführroboter umfasst, der die Zieleinführstelle und die Zielkatheterposition von der Positionierhilfe abruft und anhand der abgerufenen Zieleinführstelle und Zielkatheterposition einen Katheter in den Patienten einführt. - Eine von einem Computer durchgeführte Positioniermethode für das Positionieren von Kathetern bei einer fokalen Strahlungstherapie in Bezug auf ein vordefiniertes Zielvolumen und einer gegebenen Kathetereinstichstelle, wobei die Positioniermethode Folgendes umfasst:eine Katheterkandidaten-Bereitstellungsphase, in der die Katheterkandidatendaten für die gegebene Kathetereinstichstelle bereitgestellt und die Katheterkandidaten anhand der entsprechenden Einfügeposition des Katheterkandidaten, der entsprechenden Dauerkandidatenpositionen der Strahlungsquellen in einem gegebenen Katheterkandidaten und der entsprechend zugeordneten Verweildauer des Kandidaten definiert werden;eine Katheter-Vorauswahlphase, die folgende Schritte umfasst:Gewährleisten und Bereitstellen eines Gradienten für die Verweildauer einer kombinierten Bedingungsfunktion für die einzelnen aktuellen Katheterkandidaten. Hierfür werden die aktuellen Verweildauern der Kandidaten an den zugeordneten aktuellen Dauerpositionen des aktuellen Kandidaten unter den Katheterkandidaten herangezogen, wobei die kombinierte Bedingungsfunktion mindestens zwei lineare Bedingungen kombiniert, die den klinischen Zielsetzungen in Bezug auf die Strahlungsdosis der fokalen Strahlungstherapie entsprechen; undVorauswahl einer vordefinierten Anzahl von mindestens einem der Katheterkandidaten, die für die Gradienten der Katheterkandidaten den steilsten Abstiegswert aufweist;eine Verweildauer-Vorauswahlphase, die folgenden Schritt umfasst:Gewährleisten und vorab Auswählen anhand der aktuellen vorausgewählten Katheterkandidaten derjenigen Verweildauern der Katheterkandidaten für die entsprechenden Dauerpositionen der Kandidaten, die das Minimum einer skalaren kombinierten Bedingungsfunktion für die Verweildauer erfüllen, die die mindestens zwei linearen Bedingungen kombiniert;eine Steuerungsphase der Positionierhilfe, in der über mehrere Iterationszyklen abwechselnd die Katheter-Vorauswahl- und die Verweildauer-Vorauswahlphase aktiviert wird, und in der eine Ausgabe mit der nächsten Katheterzielposition als diejenige des mindestens einen aktuellen vorausgewählten Katheterkandidaten bereitstellt wird, wenn erkannt wurde, dass die Katheter-Vorauswahlvorrichtung für mindestens einen der Katheterkandidaten im aktuellen Iterationszyklus einen nicht negativen Wert für den Gradienten der kombinierten Bedingungsfunktion bereitgestellt hat.
- Ein Computerprogramm, das ausführbaren Code umfasst, mit dem die Methode gemäß Anspruch 11 durchgeführt wird, wenn dieser auf einem Computer oder Prozessor ausgeführt wird.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP16204563 | 2016-12-16 | ||
| PCT/EP2017/082491 WO2018108952A1 (en) | 2016-12-16 | 2017-12-12 | Positioning assistance device for focal radiation therapy |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3554633A1 EP3554633A1 (de) | 2019-10-23 |
| EP3554633B1 true EP3554633B1 (de) | 2020-08-12 |
Family
ID=57570346
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP17818098.0A Active EP3554633B1 (de) | 2016-12-16 | 2017-12-12 | Positionierhilfevorrichtung zur fokalen strahlentherapie |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11291863B2 (de) |
| EP (1) | EP3554633B1 (de) |
| JP (1) | JP2020501698A (de) |
| CN (1) | CN110087728A (de) |
| WO (1) | WO2018108952A1 (de) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3718599A1 (de) * | 2019-04-01 | 2020-10-07 | Koninklijke Philips N.V. | Behandlungsplanung für fokale therapiebehandlungen |
| EP3892224A1 (de) * | 2020-04-10 | 2021-10-13 | Koninklijke Philips N.V. | Rasterschablonenpositionierung in der interventionellen medizin |
| CN112516471B (zh) * | 2020-12-01 | 2021-08-27 | 北京航空航天大学 | 基于扩展收缩理论的放疗计划仿真设计方法及系统 |
| CN116205313B (zh) * | 2023-04-27 | 2023-08-11 | 数字浙江技术运营有限公司 | 联邦学习参与方的选择方法、装置及电子设备 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5547454A (en) * | 1993-11-02 | 1996-08-20 | Sandia Corporation | Ion-induced nuclear radiotherapy |
| US6438401B1 (en) * | 2000-04-28 | 2002-08-20 | Alpha Intervention Technology, Inc. | Indentification and quantification of needle displacement departures from treatment plan |
| ES2254599T3 (es) | 2002-06-17 | 2006-06-16 | Nucletron B.V. | Sistema de planificacion de tratamiento por radiacion en tiempo real. |
| US7505809B2 (en) * | 2003-01-13 | 2009-03-17 | Mediguide Ltd. | Method and system for registering a first image with a second image relative to the body of a patient |
| WO2005120201A2 (en) * | 2004-06-07 | 2005-12-22 | Henry Ford Health System | Image-guided intensity-modulated x-ray brachytherapy system |
| DE102005022120B4 (de) * | 2005-05-12 | 2009-04-09 | Siemens Ag | Katheter, Kathetereinrichtung und bildgebende Diagnosevorrichtung |
| DE102005029270B4 (de) * | 2005-06-23 | 2009-07-30 | Siemens Ag | Katheter, Kathetereinrichtung und bildgebende Diagnosevorrichtung |
| JP5535205B2 (ja) * | 2008-06-25 | 2014-07-02 | コーニンクレッカ フィリップス エヌ ヴェ | ブラキセラピーシステム |
| CN104203130B (zh) * | 2012-03-29 | 2017-08-15 | 皇家飞利浦有限公司 | 用于导航辅助过程的质量保证系统和方法 |
| CN104837525B (zh) * | 2012-12-11 | 2019-04-05 | 皇家飞利浦有限公司 | 用于辅助执行近距离放射治疗的辅助装置 |
| US20150112234A1 (en) * | 2013-10-18 | 2015-04-23 | Medtronic Ardian Luxembourg S.a.r.I | Devices, systems, and methods for the selective positioning of an intravascular ultrasound neuromodulation device |
| JP6568539B2 (ja) * | 2014-02-27 | 2019-08-28 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 対象の中の標的部位に放射線を照射するためのシステム |
| EP3294127A1 (de) * | 2015-05-12 | 2018-03-21 | Navix International Limited | Systeme und verfahren zur verfolgung eines katheters in einem körper |
| CN204765900U (zh) * | 2015-05-21 | 2015-11-18 | 中国人民解放军第三军医大学第一附属医院 | 一种具有精确定位靶点功能的消融导管系统 |
-
2017
- 2017-12-12 CN CN201780077938.5A patent/CN110087728A/zh active Pending
- 2017-12-12 EP EP17818098.0A patent/EP3554633B1/de active Active
- 2017-12-12 JP JP2019531755A patent/JP2020501698A/ja active Pending
- 2017-12-12 WO PCT/EP2017/082491 patent/WO2018108952A1/en not_active Ceased
- 2017-12-12 US US16/469,680 patent/US11291863B2/en active Active
Non-Patent Citations (1)
| Title |
|---|
| None * |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2018108952A1 (en) | 2018-06-21 |
| US11291863B2 (en) | 2022-04-05 |
| JP2020501698A (ja) | 2020-01-23 |
| CN110087728A (zh) | 2019-08-02 |
| EP3554633A1 (de) | 2019-10-23 |
| US20200009403A1 (en) | 2020-01-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10843008B2 (en) | System and method for attaining target dose conformity in ion beam treatment | |
| CN103889507B (zh) | 用于显示导管放置位置的医疗装置 | |
| US8333685B2 (en) | System and method for image-guided therapy planning and procedure | |
| CN107073285B (zh) | 用于逆向治疗计划的系统 | |
| EP3554633B1 (de) | Positionierhilfevorrichtung zur fokalen strahlentherapie | |
| JP6946293B2 (ja) | 適応型放射線療法計画策定 | |
| EP3532163B1 (de) | Graphische benutzerschnittstelle für iterative behandlungsplanung | |
| US20210275155A1 (en) | Image guidance system | |
| EP4440455B1 (de) | Planungsvorrichtung zur positionierung von behandlungsapplikatoren | |
| US10426974B2 (en) | Treatment planning system | |
| EP3946572B1 (de) | Behandlungsplanung für fokale therapiebehandlungen | |
| Guthier | Development of a real-time inverse planning system for radiation therapy based on compressed sensing | |
| HK1241781A1 (en) | System for inverse treatment planning |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: UNKNOWN |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE INTERNATIONAL PUBLICATION HAS BEEN MADE |
|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20190716 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: KONINKLIJKE PHILIPS N.V. |
|
| DAV | Request for validation of the european patent (deleted) | ||
| DAX | Request for extension of the european patent (deleted) | ||
| INTG | Intention to grant announced |
Effective date: 20200302 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602017021692 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1300945 Country of ref document: AT Kind code of ref document: T Effective date: 20200915 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20200812 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200812 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200812 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200812 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200812 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201112 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201113 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201112 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 1300945 Country of ref document: AT Kind code of ref document: T Effective date: 20200812 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201212 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200812 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200812 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200812 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200812 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200812 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200812 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200812 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200812 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200812 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602017021692 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200812 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200812 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200812 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200812 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 602017021692 Country of ref document: DE |
|
| 26N | No opposition filed |
Effective date: 20210514 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200812 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200812 Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200812 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20201231 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20201231 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20201212 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20201212 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20201231 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20201231 Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210701 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200812 Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200812 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200812 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200812 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200812 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20201231 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20211212 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20211212 |