EP3431881A1 - Monitoring device, cooker and monitoring method - Google Patents
Monitoring device, cooker and monitoring method Download PDFInfo
- Publication number
- EP3431881A1 EP3431881A1 EP17182622.5A EP17182622A EP3431881A1 EP 3431881 A1 EP3431881 A1 EP 3431881A1 EP 17182622 A EP17182622 A EP 17182622A EP 3431881 A1 EP3431881 A1 EP 3431881A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- distance
- cooking
- distance sensor
- sensor
- cooker
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000012806 monitoring device Methods 0.000 title claims abstract description 60
- 238000012544 monitoring process Methods 0.000 title claims abstract description 30
- 238000000034 method Methods 0.000 title claims abstract description 21
- 238000010411 cooking Methods 0.000 claims abstract description 144
- 239000007788 liquid Substances 0.000 claims abstract description 21
- 230000003287 optical effect Effects 0.000 claims description 7
- 238000004891 communication Methods 0.000 claims description 6
- 238000010586 diagram Methods 0.000 description 8
- 238000009835 boiling Methods 0.000 description 7
- 238000005259 measurement Methods 0.000 description 6
- 230000005574 cross-species transmission Effects 0.000 description 2
- 239000003517 fume Substances 0.000 description 2
- 239000007789 gas Substances 0.000 description 2
- 239000011521 glass Substances 0.000 description 2
- 230000006978 adaptation Effects 0.000 description 1
- 238000004939 coking Methods 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 230000006698 induction Effects 0.000 description 1
- 230000000977 initiatory effect Effects 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images


Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F24—HEATING; RANGES; VENTILATING
- F24C—DOMESTIC STOVES OR RANGES ; DETAILS OF DOMESTIC STOVES OR RANGES, OF GENERAL APPLICATION
- F24C15/00—Details
- F24C15/20—Removing cooking fumes
- F24C15/2021—Arrangement or mounting of control or safety systems
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F24—HEATING; RANGES; VENTILATING
- F24C—DOMESTIC STOVES OR RANGES ; DETAILS OF DOMESTIC STOVES OR RANGES, OF GENERAL APPLICATION
- F24C7/00—Stoves or ranges heated by electric energy
- F24C7/08—Arrangement or mounting of control or safety devices
- F24C7/082—Arrangement or mounting of control or safety devices on ranges, e.g. control panels, illumination
- F24C7/083—Arrangement or mounting of control or safety devices on ranges, e.g. control panels, illumination on tops, hot plates
Definitions
- the invention relates to a monitoring device, a cooker and a monitoring method.
- the liquids When cooking, especially with liquids, the liquids may start boiling. When a liquid like water is boiling, the level of liquid in the respective cooking vessel may rise. If the heat transfer to the cooking vessel is not interrupted or reduced, the liquid will eventually overflow and spill over the cooking surface.
- the present invention provides a monitoring device with the features of claim 1, a cooker with the features of claim 11 and a monitoring method with the features of claim 13.
- the present invention is based on the fact that the level of liquid inside of a cooking vessel will increase when the liquid starts boiling. When the liquid overflows from the cooking vessel, the cooking surface may become dirty. In addition, it is difficult to clean dry stains after cooking. Therefore, the present invention identifies overflow situations and takes respective precautions.
- the present invention therefore tries to detect an overflow of liquid inside of a cooking vessel by sensing the instant liquid level.
- the present invention provides the distance sensor that continuously measures the level of liquid in the cooking vessel.
- the distance sensor is arranged over the cooking surface of the cooker, e.g. over a cooking hob that accommodates the cooking vessel and senses the downward distance between the distance sensor and the content of the cooking vessel, i.e. the content distance.
- the distance sensor is coupled to a control unit and provides data representing the measured content distance to the control unit.
- the data may e.g. be provided as analog voltage or current or as digital data.
- the control unit will then evaluate the measured content distance and determine an increase in the level of content in the cooking vessel.
- the control unit may e.g. measure the content distance in predetermined time intervals, once every second or once every 500 milliseconds or once every 2 seconds.
- the control unit If the level of content in the cooking vessel rises such that the measured content distance falls below the threshold distance, the control unit emits a warning signal.
- This warning signal may then e.g. be provided as acoustic warning to a user.
- the warning signal may also be provided to a controller of the cooker.
- the controller of the cooker may then e.g. reduce the power of the respective cooking hob.
- the cooker may e.g. be an electric cooker like e.g. an induction cooker or a resistive cooker. It is however understood, that the cooker may be any type of cooker that allows controlled the output power of the single cooking hobs.
- the cooker may therefore e.g. be a gas cooker with controllable gas valves.
- the control unit may be any type of control unit that is capable of comparing the measured content distance to the threshold distance.
- the control unit may be as simple as an analog comparator, wherein one of the comparator inputs may be coupled to a constant voltage source that defines the threshold distance.
- the other comparator input may be coupled to the output of the distance sensor, in this case an analog distance sensor.
- the control unit may e.g. also be a processor based control unit, like e.g. a microcontroller or microprocessor comprising a respective program with executable instructions.
- the distance sensor may e.g. be coupled to the processor via an analog-to-digital converter or a digital interface.
- the program may then comprise the logic to acquire the measured content distance and compare the measured content distance with the threshold distance.
- the warning signal may e.g. be provided to the user via a sound source, e.g. a beeper that may be connected to a pin of the controller.
- the warning signal may be provided to the controller of the cooker e.g. via an analog or digital data connection.
- the warning signal may e.g. be a binary signal that only comprises two states that indicate if the measured content distance is higher or lower than the threshold distance.
- the warning signal may however also comprise the measured content distance. This allows the controller of the cooker a fine grained power control.
- the controller may e.g. reduce the power on the respective cooking hob according to the difference between the measured content distance and the threshold distance.
- the monitoring device may comprise a mechanical sensor movement device that may carry the distance sensor and may be configured to translationally move the distance sensor parallel to a surface of the cooking hob, wherein the control unit is configured to determine the threshold distance based at least on a minimum measured distance measured during a movement of the distance sensor over the surface of the cooking hob.
- the mechanical sensor movement device may be any kind of device that carries and moves the distance sensor. Such a device may comprise mechanical and electrical components that interact to provide the movement.
- the control of the movement may e.g. be performed by the control unit. This allows the control unit to synchronize the measurement of the content distance with the positioning of the distance sensor.
- the mechanical sensor movement device may move the distance sensor in a plane parallel to the cooking surface of the cooker the hobs.
- the distance sensor will measure three different distances. The largest distance is the distance between the distance sensor and the surface of the cooking hob. The smallest distance is the distance between the upper edge or rim of the cooking vessel and the distance sensor. The third distance will be between the largest distance and the smallest distance and will represent the content distance.
- the distance sensor may e.g. start on one end of its movement range. There the sensor will probably measure the distance to the cooking surface or hob of the cooker. The movement will move the distance sensor of the top edge of the cooking vessel on one side of the cooking vessel. Here the minimum distance will be measured. Further movement will move the distance sensor over the content of the cooking vessel. Here the content distance will be measured. Then the distance sensor will again move over the top edge of the cooking vessel and then the cooking surface of the cooker or hob. Therefore, cooking vessels of any size may be used with the present invention.
- the range of movement of the distance sensor may be larger by a predetermined size than the outer edge or outer dimensions of the respective cooking hob. This will make sure that the distance sensor measures the above mentioned distances even if the cooking vessel is larger than the cooking hob.
- the control unit may then use the minimum distance as a base value for calculating the threshold distance.
- the aim is that the content distance stays below the minimum distance, which represents the upper edge of the cooking vessel. This will ensure that the content does not leak out of the cooking vessel and does not spill over the surface of the cooker.
- the mechanical sensor movement device may comprise guide rails and at least one slide and an electric drive for moving the at least one slide, wherein the distance sensor may be arranged on the at least one slide.
- a guide rail and slide system is a mechanically very stable yet simple construction that may be efficiently used to move the distance sensor.
- the electric drive e.g. an electric motor, may e.g. drive the slide directly and be mounted on the slide or the guide rail.
- the electric drive may be coupled to the slide via belts or via a threaded spindle.
- the monitoring device may comprise a cooker hood, especially an exhaust hood, wherein the mechanical sensor movement device may be arranged in the cooker hood.
- Exhaust hoods also called e.g. fume extractor hoods, may be provided over the cooker surface to extract fumes that are generated while cooking.
- a fume extractor hood may be provided directly over the coking surface and is therefore in the ideal position to accommodate the distance sensor.
- the monitoring device may comprise one dedicated distance sensor for every cooking hob of the cooker.
- the cooker may comprise a plurality of cooking hobs, like e.g. four cooking hobs. It is obvious, that the monitoring device should not only monitor one of the cooking hobs. Therefore, a dedicated distance sensor may be provided for every cooking hob.
- a mechanical sensor movement device may be provided for every distance sensor.
- a purely linear mechanical sensor movement device may e.g. comprise a linear guide rail that spans over two cooking hobs.
- Another possible mechanical sensor movement device may be a circular mechanical sensor movement device.
- a circular mechanical sensor movement device may e.g. comprise a circular guide rail with a slide or a rotating element, e.g. a rod or beam that rotates around the center of the cooker surface in a plane parallel to the cooker surface.
- the radius of the movement may e.g. be such that the distance sensor moves over the center points of all the single cooking hobs during a full turn.
- control unit may be configured to determine the threshold distance as being the sum of the minimum measured distance and a safety margin distance.
- the minimum measured distance represents the top edge or rim of the cooking vessel. Therefore, when the measured content distance is equal to the minimum measured distance, the content has already reached the top edge of the cooking vessel and is about to overflow. Therefore, a safety margin distance may be added to the minimum distance to determine the threshold distance.
- the safety margin distance may comprise a predetermined constant value of e.g. 1 cm to 5 cm, e.g. 1 cm, 2 cm, 3 cm, 4 cm or 5 cm, or 5 cm to 10 cm.
- the control unit may as alternative also be configured to determine the threshold distance as being the sum of the minimum measured distance and a predetermined percentage of the difference between the maximum measured distance and the minimum measured distance.
- the difference between the maximum measured distance and the minimum measured distance will result in the approximate height of the cooking vessel.
- a percentage of this height may e.g. be used as the safety margin.
- the percentage may e.g. be 10%, 20%, 30%, 40% or 50%. Any value between the explicitly mentioned values is also possible.
- the distance sensor may comprise an ultrasonic-based distance sensor.
- Ultrasonic-based distance sensors also called ultrasonic distance sensors, emit high frequency sound waves, e.g. in the ultrasonic frequency range that is not perceptible to the human ear. This high frequency sound waves are sent by the ultrasonic distance sensor in the direction of the cooker surface or the cooking vessel. When the ultrasonic sound waves hit the obstacle, i.e. the content of the cooking vessel, the surface of the cooker or the top edge of the cooking vessel, they are reflected back and the sound waves are detected by the distance sensor.
- the obstacle i.e. the content of the cooking vessel, the surface of the cooker or the top edge of the cooking vessel
- the time of travel of the sound wave varies depending on the distance between the obstacle and the distance sensor.
- the velocity of ultrasonic sound waves is known.
- the distance information may therefore be obtained by multiplying the known speed of the ultrasonic sound waves with half the value (because of the sound waves traveling from the distance sensor to the content and back) of the time of travel of the ultrasonic sound waves. As indicated above, this information may be converted into an analog voltage or a digital value for outputting to the control unit.
- the distance sensor may e.g. comprise an ultrasonic transmitter that emits the ultrasonic sound waves and a receiver that receives the sound waves.
- a measurement element in the distance sensor may then measure the time of travel of the ultrasonic sound waves.
- the distance sensor may comprise an optical distance sensor, especially a camera, especially a stereo camera, or a time of flight sensor.
- the ultrasonic distance sensor mentioned above may certainly work correctly if the cooking vessel is not covered with a lid. If a lid is provided that covers the cooking vessel, the distance sensor may not measure through the lid.
- an optical distance sensor may however measure the distance through such a lid.
- a time of flight sensor may e.g. use laser light to measure the content distance. It is understood, that a time of flight sensor may receive photons that are reflected on the lid and photons that are reflected by the content of the cooking vessel. The time of flight sensor may therefore be configured to register or process only the last incoming photons, which will be the ones reflected from the surface that is farthest away from the detector of the distance sensor, i.e. the content of the cooking vessel.
- a stereo camera may also be used to determine the distance to the content of the cooking vessel through a glass lid on the cooking vessel.
- the stereo camera may comprise two separate camera or imaging sensors for recording images of the cooking vessel from different perspectives.
- a triangulation technique may then be used to determine the content distance to the content in the cooking vessel.
- control unit may be configured to detect that a cooking vessel is placed under the distance sensor based on the measured content distance and may automatically measure the minimum measured distance after detecting that a cooking vessel is placed under the distance sensor.
- the control unit may e.g. permanently monitor the distance that is currently measured by the distance sensor. If this distance is the maximum distance measured during a movement of the distance sensor, the control unit may assume that no cooking vessel is placed on the respective hob. As soon as the measured distance decreases, the control unit may initiate another measurement moving the distance sensor from one extreme of the mechanical sensor movement device to the other extreme, and therefore scan the respective hob.
- control unit may also monitor if a cooking vessel is removed after it has been placed on the hob.
- the control unit may e.g. control the distance sensor to be in the center of the cooking hob after a cooking vessel is placed on the cooking hob. If the measured distance in this position during a measurement is equal to the maximum distance or at least lower than the originally measured content distance (without the content boiling), the control unit may assume that the cooking vessel is removed.
- the warning signal output may then be deactivated and the above described measurements may be performed, if a new cooking vessel is placed on the cooking hob.
- the monitoring device may also comprise user input elements, like e.g. buttons or the like that may trigger the monitoring device to monitor a cooking vessel.
- the monitoring device e.g. the control unit, may repeatedly monitor the content distance in predetermined intervals.
- the monitoring device may comprise a communication interface configured to couple to the cooker and receive information about active cooking hobs of the cooker.
- the communication interface of the monitoring device may be any type of interface that serves to transmit the information about active cooking hobs of the cooker to the monitoring device.
- Such an interface may e.g. be a discrete interface that comprises for every hob a binary input. If a positive signal is provided by the cooker at that input, the monitoring device may start monitoring the respective hob. With such an interface the cooker need not necessarily be provided with a digital controller because such signals may also be generated in an analog fashion.
- the interface may however also comprise a digital, e.g. serial or parallel, interface that communicates the monitoring device with the cooker.
- the monitoring device may then start monitoring a hob, if the respective hob is indicated as active.
- Fig. 1 shows a block diagram of an embodiment of a cooker 100.
- the cooker 100 comprises a controller 101 that controls four cooking hobs 102, 103, 104, 105.
- the cooker 100 further comprises a monitoring device 106.
- the monitoring device 106 comprises a distance sensor 107.
- the distance sensor 107 is coupled to a control unit 109 and provides a measured distance 108 to the control unit 109.
- the cooking hobs 102, 103, 104, 105 may be used to heat up content of a cooking vessel that is placed on a respective one of the cooking hobs 102, 103, 104, 105.
- the controller 101 may control the output power or heat level that is generated by the cooking hobs 102, 103, 104, 105. If liquid in a cooking vessel starts boiling, the level of liquid in the vessel may rise.
- the rising of the liquid level may be detected and a warning signal 111 may be output by the control unit 109.
- the control unit 109 after receiving a measured distance 108 from the distance sensor 107 may compare the measured distance 108 to a threshold distance 110.
- the threshold distance 110 may e.g. be predetermined. However, to provide more flexibility and the ability to adapt the monitoring device 106 to different cooking vessels, the threshold distance 110 may be configurable or the control unit 109 may automatically determine the threshold distance 110. A user may e.g. indicate that a cooking vessel is placed under the distance sensor 107. The control unit 109 may then determine the distance 108 to the content of the cooking vessel. The control unit 109 may determine the threshold distance 110 based on this measured distance. The control unit 109 may e.g. add a specific amount, e.g. 1 cm, 2 cm, 3 cm, 4 cm or the like to the measured distance 108 to determine the threshold distance 110. Another scheme for determining the threshold distance 110 will be presented and explained with regard to Fig. 3 .
- the distance sensor 107 of the monitoring device 106 may e.g. be an ultrasonic-based distance sensor 107. As explained above, ultrasonic distance sensors measure a distance by measuring the time of travel of emitted ultrasonic sound waves. As an alternative, the distance sensor 107 may be an optical distance sensor 107 like e.g. a stereo camera or a time of flight sensor.
- distance sensor 107 may be provided for every cooking hob 102, 103, 104, 105 of the cooker 100.
- the monitoring device 106 further comprises an optional communication interface 112.
- the communication interface 112 may be used to communicate data from the cooker 100, i.e. the controller 101, to the monitoring device 106, i.e. the control unit 109.
- the data may e.g. comprise information about active cooking hobs 102, 103, 104, 105 of the cooker 100.
- the data may also comprise the warning signal 111 that may be communicated to the controller 101.
- the controller 101 may then e.g. lower the output power of the respective cooking hob 102, 103, 104, 105.
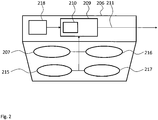
- Fig. 2 shows a block diagram of a monitoring device 206.
- the monitoring device 206 is shown without any cooker. This is to emphasize that the monitoring device 206 may also be provided as separate device that need not necessarily be an integral part of a cooker. Instead the monitoring device 206 may e.g. be integrated into a cooker or exhaust hood that may be provided e.g. in a kitchen.
- the monitoring device 206 comprises four distance sensors 207, 215, 216, 217 that are coupled to a control unit 209.
- the control unit 209 may compare the measured distances to the threshold distance 210.
- the monitoring device 206 comprises a user input 218 that is coupled to the control unit 209.
- every one of the distance sensors 207, 215, 216, 217 is configured to monitor one of the hobs of a cooker that is provided under the monitoring device 206. Therefore, every one of the distance sensors 207, 215, 216, 217 separately provides measurement values to the control unit 209.
- the control unit 209 may then separately monitor the single hobs and provide separate warning signals 211 for the different hobs.
- different audible signals may be provided as warning signals 211 that identify the respective hob.
- the position of the respective hob may e.g. be provided to a user as voice output.
- the warning signal 211 may e.g. be provided as a combined audible and visible signal.
- An audible beeping signal could e.g. alert a user and a visual indication could e.g. indicate the respective hob.
- a single signal e.g. a light, may be provided for every hob.
- the user input 218 may be used by a user to control the monitoring device 206.
- the user may e.g. activate the monitoring device 206 via the user input 218.
- the user may also initiate the monitoring device 206 such that the control unit 209 measures a distance and stores this distance as the distance to the content of the cooking vessel without the content boiling. This stored distance may then be used as a basis for monitoring overflow.
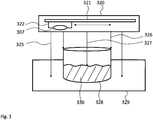
- Fig. 3 shows a block diagram of another monitoring device, especially the distance sensor 307 and a mechanical sensor movement device 320 that carries the distance sensor 307.
- the mechanical sensor movement device 320 comprises a guide rail 321.
- a slide 322 is arranged on the guide rail 321 and carries the distance sensor 307. It is understood, that any type of drive, e.g. an electric motor with a belt or a threaded spindle may be used to drive the slide 322, although it is not separately shown.
- the distance sensor 307 may be moved on a linear trajectory e.g. in a plane parallel to the cooker surface 329.
- the mechanical sensor movement device 320 is positioned such that the distance sensor 307 may move over at least one hob of the cooker surface 329. It is understood, that the mechanical sensor movement device 320 may also be long enough to allow movement of the distance sensor 307 over two or more adjacent hobs of the cooker surface 329.
- an exemplary cooking vessel 328 is placed on the cooker surface 329.
- the monitoring device may determine three distances on the way from one end point to the other end point of the guide rail 321.
- the first distance is the maximum measured distance 325. This distance is the distance from the distance sensor 307 to the cooker surface 329.
- the second distance may be the minimum measured distance 326, i.e. the distance between the distance sensor 307 and the top edge of the cooking vessel 328.
- the third distance will then be the content distance 327, i.e. the distance between the distance sensor 307 and the content 330 in the cooking vessel 328.
- the control unit of the monitoring device may then e.g. calculate the threshold distance based on the minimum measured distance 326 or on a relationship of the maximum measured distance 325 to the minimum measured distance 326.
- the difference of these values is the approximate height of the cooking vessel 328.
- the difference of the minimum measured distance 326 and the content distance 327 is the margin that is available for the boiling content 330 until it overflows.
- Fig. 4 shows a flow diagram of an embodiment of a monitoring method for monitoring liquid overflow in a cooking vessel 328 on a cooking hob 102, 103, 104, 105 of a cooker 100.
- the monitoring method comprises measuring S1 a content distance 327 between a distance sensor 107, 207, 215, 216, 217, 307 and a content of the cooking vessel 328 with an ultrasonic distance sensor 107, 207, 215, 216, 217, 307 or with an optical distance sensor 107, 207, 215, 216, 217, 307.
- the monitoring method also comprises comparing S2 the measured content distance 327 to a threshold distance 110, 210, and outputting S3 a warning signal 111, 211 if the measured content distance 327 is smaller than the threshold distance 110, 210.
- the monitoring method may comprise translationally moving the distance sensor 107, 207, 215, 216, 217, 307 parallel to a surface of the cooking hob 102, 103, 104, 105, and determining the threshold distance 110, 210 based at least on a minimum measured distance 326 measured during a movement of the distance sensor 107, 207, 215, 216, 217, 307 over the surface of the cooking hob 102, 103, 104, 105.
- the threshold distance 110, 210 may e.g. be determined as the sum of the minimum measured distance 326 and a safety margin distance.
- the monitoring method may also comprise detecting that a cooking vessel 328 is placed under the distance sensor 107, 207, 215, 216, 217, 307 based on the measured content distance 327.
- the minimum measured distance 326 may then automatically be measured after detecting that a cooking vessel 328 is placed under the distance sensor 107, 207, 215, 216, 217, 307 again.
- the present invention provides a monitoring device 106, 206 for monitoring liquid overflow in a cooking vessel 328 on a cooking hob 102, 103, 104, 105 of a cooker 100, the monitoring device 106, 206 comprising a distance sensor 107, 207, 215, 216, 217, 307 that is arranged over the cooking hob 102, 103, 104, 105 and that is configured to measure a content distance 327 between the distance sensor 107, 207, 215, 216, 217, 307 and a content of the cooking vessel 328, and a control unit 109, 209 that is coupled to the distance sensor 107, 207, 215, 216, 217, 307 and that is configured to compare the measured content distance 327 to a threshold distance 110, 210 and to output a warning signal 111, 211 if the measured content distance 327 is smaller than the threshold distance 110, 210.
- the present invention provides a cooker 100 and a respective monitoring method.
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Electric Stoves And Ranges (AREA)
- Measurement Of Levels Of Liquids Or Fluent Solid Materials (AREA)
- Emergency Alarm Devices (AREA)
Abstract
Description
- The invention relates to a monitoring device, a cooker and a monitoring method.
- Although applicable to any heating device, the present invention will mainly be described in conjunction with kitchen cookers.
- When cooking, especially with liquids, the liquids may start boiling. When a liquid like water is boiling, the level of liquid in the respective cooking vessel may rise. If the heat transfer to the cooking vessel is not interrupted or reduced, the liquid will eventually overflow and spill over the cooking surface.
- Accordingly, there is a need for detecting a raising level of content in a cooking device.
- The present invention provides a monitoring device with the features of
claim 1, a cooker with the features of claim 11 and a monitoring method with the features of claim 13. - Accordingly, it is provided:
- A monitoring device for monitoring liquid overflow in a cooking vessel on a cooking hob of a cooker, the monitoring device comprising a distance sensor that is arranged over the cooking hob and that is configured to measure a content distance between the distance sensor and a content of the cooking vessel, and a control unit that is coupled to the distance sensor and that is configured to compare the measured content distance to a threshold distance and to output a warning signal if the measured content distance is smaller than the threshold distance.
- Further, it is provided:
- A cooker for cooking content in cooking vessels, the cooker comprising a number of cooking hobs for accommodating the cooking vessels, and a monitoring device according to the present invention.
- Further, it is provided:
- A monitoring method for monitoring liquid overflow in a cooking vessel on a cooking hob of a cooker, the monitoring method comprising measuring a content distance between a distance sensor and a content of the cooking vessel with an ultrasonic distance sensor or with an optical distance sensor, comparing the measured content distance to a threshold distance, and outputting a warning signal if the measured content distance is smaller than the threshold distance.
- The present invention is based on the fact that the level of liquid inside of a cooking vessel will increase when the liquid starts boiling. When the liquid overflows from the cooking vessel, the cooking surface may become dirty. In addition, it is difficult to clean dry stains after cooking. Therefore, the present invention identifies overflow situations and takes respective precautions.
- The present invention therefore tries to detect an overflow of liquid inside of a cooking vessel by sensing the instant liquid level. The present invention provides the distance sensor that continuously measures the level of liquid in the cooking vessel. To this end the distance sensor is arranged over the cooking surface of the cooker, e.g. over a cooking hob that accommodates the cooking vessel and senses the downward distance between the distance sensor and the content of the cooking vessel, i.e. the content distance.
- The distance sensor is coupled to a control unit and provides data representing the measured content distance to the control unit. The data may e.g. be provided as analog voltage or current or as digital data. The control unit will then evaluate the measured content distance and determine an increase in the level of content in the cooking vessel. The control unit may e.g. measure the content distance in predetermined time intervals, once every second or once every 500 milliseconds or once every 2 seconds.
- If the level of content in the cooking vessel rises such that the measured content distance falls below the threshold distance, the control unit emits a warning signal. This warning signal may then e.g. be provided as acoustic warning to a user.
- In addition or as alternative the warning signal may also be provided to a controller of the cooker. The controller of the cooker may then e.g. reduce the power of the respective cooking hob. It is understood that the cooker may e.g. be an electric cooker like e.g. an induction cooker or a resistive cooker. It is however understood, that the cooker may be any type of cooker that allows controlled the output power of the single cooking hobs. The cooker may therefore e.g. be a gas cooker with controllable gas valves.
- The control unit may be any type of control unit that is capable of comparing the measured content distance to the threshold distance. In case that a fixed threshold distance is used, the control unit may be as simple as an analog comparator, wherein one of the comparator inputs may be coupled to a constant voltage source that defines the threshold distance. The other comparator input may be coupled to the output of the distance sensor, in this case an analog distance sensor. However, the control unit may e.g. also be a processor based control unit, like e.g. a microcontroller or microprocessor comprising a respective program with executable instructions. The distance sensor may e.g. be coupled to the processor via an analog-to-digital converter or a digital interface. The program may then comprise the logic to acquire the measured content distance and compare the measured content distance with the threshold distance. The warning signal may e.g. be provided to the user via a sound source, e.g. a beeper that may be connected to a pin of the controller. The warning signal may be provided to the controller of the cooker e.g. via an analog or digital data connection. The warning signal may e.g. be a binary signal that only comprises two states that indicate if the measured content distance is higher or lower than the threshold distance. The warning signal may however also comprise the measured content distance. This allows the controller of the cooker a fine grained power control. The controller may e.g. reduce the power on the respective cooking hob according to the difference between the measured content distance and the threshold distance.
- Further embodiments of the present invention are subject of the further subclaims and of the following description, referring to the drawings.
- In an embodiment, the monitoring device may comprise a mechanical sensor movement device that may carry the distance sensor and may be configured to translationally move the distance sensor parallel to a surface of the cooking hob, wherein the control unit is configured to determine the threshold distance based at least on a minimum measured distance measured during a movement of the distance sensor over the surface of the cooking hob.
- The mechanical sensor movement device may be any kind of device that carries and moves the distance sensor. Such a device may comprise mechanical and electrical components that interact to provide the movement. The control of the movement may e.g. be performed by the control unit. This allows the control unit to synchronize the measurement of the content distance with the positioning of the distance sensor. The mechanical sensor movement device may move the distance sensor in a plane parallel to the cooking surface of the cooker the hobs.
- During a movement of the distance sensor over the cooking hob, the distance sensor will measure three different distances. The largest distance is the distance between the distance sensor and the surface of the cooking hob. The smallest distance is the distance between the upper edge or rim of the cooking vessel and the distance sensor. The third distance will be between the largest distance and the smallest distance and will represent the content distance.
- The distance sensor may e.g. start on one end of its movement range. There the sensor will probably measure the distance to the cooking surface or hob of the cooker. The movement will move the distance sensor of the top edge of the cooking vessel on one side of the cooking vessel. Here the minimum distance will be measured. Further movement will move the distance sensor over the content of the cooking vessel. Here the content distance will be measured. Then the distance sensor will again move over the top edge of the cooking vessel and then the cooking surface of the cooker or hob. Therefore, cooking vessels of any size may be used with the present invention.
- It is understood, that the range of movement of the distance sensor may be larger by a predetermined size than the outer edge or outer dimensions of the respective cooking hob. This will make sure that the distance sensor measures the above mentioned distances even if the cooking vessel is larger than the cooking hob.
- The control unit may then use the minimum distance as a base value for calculating the threshold distance. The aim is that the content distance stays below the minimum distance, which represents the upper edge of the cooking vessel. This will ensure that the content does not leak out of the cooking vessel and does not spill over the surface of the cooker.
- In another embodiment, the mechanical sensor movement device may comprise guide rails and at least one slide and an electric drive for moving the at least one slide, wherein the distance sensor may be arranged on the at least one slide.
- A guide rail and slide system is a mechanically very stable yet simple construction that may be efficiently used to move the distance sensor. The electric drive, e.g. an electric motor, may e.g. drive the slide directly and be mounted on the slide or the guide rail. As alternative, the electric drive may be coupled to the slide via belts or via a threaded spindle.
- In a further embodiment, the monitoring device may comprise a cooker hood, especially an exhaust hood, wherein the mechanical sensor movement device may be arranged in the cooker hood.
- Exhaust hoods, also called e.g. fume extractor hoods, may be provided over the cooker surface to extract fumes that are generated while cooking. Usually such an exhaust hood will be provided directly over the coking surface and is therefore in the ideal position to accommodate the distance sensor.
- In an embodiment, the monitoring device may comprise one dedicated distance sensor for every cooking hob of the cooker.
- The cooker may comprise a plurality of cooking hobs, like e.g. four cooking hobs. It is obvious, that the monitoring device should not only monitor one of the cooking hobs. Therefore, a dedicated distance sensor may be provided for every cooking hob.
- It is understood, that also one mechanical sensor movement device may be provided for every distance sensor. As alternative, it may be possible to provide a mechanical sensor movement device that moves a distance sensor over two or all of the hobs. A purely linear mechanical sensor movement device may e.g. comprise a linear guide rail that spans over two cooking hobs.
- Another possible mechanical sensor movement device may be a circular mechanical sensor movement device. Such a circular mechanical sensor movement device may e.g. comprise a circular guide rail with a slide or a rotating element, e.g. a rod or beam that rotates around the center of the cooker surface in a plane parallel to the cooker surface. The radius of the movement may e.g. be such that the distance sensor moves over the center points of all the single cooking hobs during a full turn.
- In another embodiment, the control unit may be configured to determine the threshold distance as being the sum of the minimum measured distance and a safety margin distance.
- As explained above, the minimum measured distance represents the top edge or rim of the cooking vessel. Therefore, when the measured content distance is equal to the minimum measured distance, the content has already reached the top edge of the cooking vessel and is about to overflow. Therefore, a safety margin distance may be added to the minimum distance to determine the threshold distance. The safety margin distance may comprise a predetermined constant value of e.g. 1 cm to 5 cm, e.g. 1 cm, 2 cm, 3 cm, 4 cm or 5 cm, or 5 cm to 10 cm.
- The control unit may as alternative also be configured to determine the threshold distance as being the sum of the minimum measured distance and a predetermined percentage of the difference between the maximum measured distance and the minimum measured distance. The difference between the maximum measured distance and the minimum measured distance will result in the approximate height of the cooking vessel. A percentage of this height may e.g. be used as the safety margin. The percentage may e.g. be 10%, 20%, 30%, 40% or 50%. Any value between the explicitly mentioned values is also possible.
- In an embodiment, the distance sensor may comprise an ultrasonic-based distance sensor.
- Ultrasonic-based distance sensors, also called ultrasonic distance sensors, emit high frequency sound waves, e.g. in the ultrasonic frequency range that is not perceptible to the human ear. This high frequency sound waves are sent by the ultrasonic distance sensor in the direction of the cooker surface or the cooking vessel. When the ultrasonic sound waves hit the obstacle, i.e. the content of the cooking vessel, the surface of the cooker or the top edge of the cooking vessel, they are reflected back and the sound waves are detected by the distance sensor.
- The time of travel of the sound wave varies depending on the distance between the obstacle and the distance sensor. The velocity of ultrasonic sound waves is known. The distance information may therefore be obtained by multiplying the known speed of the ultrasonic sound waves with half the value (because of the sound waves traveling from the distance sensor to the content and back) of the time of travel of the ultrasonic sound waves. As indicated above, this information may be converted into an analog voltage or a digital value for outputting to the control unit.
- The distance sensor may e.g. comprise an ultrasonic transmitter that emits the ultrasonic sound waves and a receiver that receives the sound waves. A measurement element in the distance sensor may then measure the time of travel of the ultrasonic sound waves.
- In a further embodiment, the distance sensor may comprise an optical distance sensor, especially a camera, especially a stereo camera, or a time of flight sensor.
- The ultrasonic distance sensor mentioned above may certainly work correctly if the cooking vessel is not covered with a lid. If a lid is provided that covers the cooking vessel, the distance sensor may not measure through the lid.
- Especially with glass lids an optical distance sensor may however measure the distance through such a lid. A time of flight sensor may e.g. use laser light to measure the content distance. It is understood, that a time of flight sensor may receive photons that are reflected on the lid and photons that are reflected by the content of the cooking vessel. The time of flight sensor may therefore be configured to register or process only the last incoming photons, which will be the ones reflected from the surface that is farthest away from the detector of the distance sensor, i.e. the content of the cooking vessel.
- A stereo camera may also be used to determine the distance to the content of the cooking vessel through a glass lid on the cooking vessel. The stereo camera may comprise two separate camera or imaging sensors for recording images of the cooking vessel from different perspectives. A triangulation technique may then be used to determine the content distance to the content in the cooking vessel.
- In an embodiment, the control unit may be configured to detect that a cooking vessel is placed under the distance sensor based on the measured content distance and may automatically measure the minimum measured distance after detecting that a cooking vessel is placed under the distance sensor.
- The control unit may e.g. permanently monitor the distance that is currently measured by the distance sensor. If this distance is the maximum distance measured during a movement of the distance sensor, the control unit may assume that no cooking vessel is placed on the respective hob. As soon as the measured distance decreases, the control unit may initiate another measurement moving the distance sensor from one extreme of the mechanical sensor movement device to the other extreme, and therefore scan the respective hob.
- In addition to monitoring if a cooking vessel is placed on the hob, the control unit may also monitor if a cooking vessel is removed after it has been placed on the hob. The control unit may e.g. control the distance sensor to be in the center of the cooking hob after a cooking vessel is placed on the cooking hob. If the measured distance in this position during a measurement is equal to the maximum distance or at least lower than the originally measured content distance (without the content boiling), the control unit may assume that the cooking vessel is removed. The warning signal output may then be deactivated and the above described measurements may be performed, if a new cooking vessel is placed on the cooking hob.
- It is understood, that the monitoring device may also comprise user input elements, like e.g. buttons or the like that may trigger the monitoring device to monitor a cooking vessel.
- After initiating the monitoring of a cooking vessel, as already indicated above, the monitoring device, e.g. the control unit, may repeatedly monitor the content distance in predetermined intervals.
- In another embodiment, the monitoring device may comprise a communication interface configured to couple to the cooker and receive information about active cooking hobs of the cooker.
- The communication interface of the monitoring device may be any type of interface that serves to transmit the information about active cooking hobs of the cooker to the monitoring device. Such an interface may e.g. be a discrete interface that comprises for every hob a binary input. If a positive signal is provided by the cooker at that input, the monitoring device may start monitoring the respective hob. With such an interface the cooker need not necessarily be provided with a digital controller because such signals may also be generated in an analog fashion. The interface may however also comprise a digital, e.g. serial or parallel, interface that communicates the monitoring device with the cooker.
- The monitoring device may then start monitoring a hob, if the respective hob is indicated as active.
- For a more complete understanding of the present invention and advantages thereof, reference is now made to the following description taken in conjunction with the accompanying drawings. The invention is explained in more detail below using exemplary embodiments, which are specified in the schematic figures of the drawings, in which:
-
Fig. 1 shows a block diagram of an embodiment of a cooker according to the present invention; -
Fig. 2 shows a block diagram of an embodiment of a monitoring device according to the present invention; -
Fig. 3 shows a block diagram of another embodiment of a monitoring device according to the present invention; and -
Fig. 4 shows a flow diagram of an embodiment of a monitoring method according to the present invention. - In the figures like reference signs denote like elements unless stated otherwise.
-
Fig. 1 shows a block diagram of an embodiment of acooker 100. Thecooker 100 comprises acontroller 101 that controls fourcooking hobs cooker 100 further comprises amonitoring device 106. Themonitoring device 106 comprises adistance sensor 107. Thedistance sensor 107 is coupled to acontrol unit 109 and provides a measureddistance 108 to thecontrol unit 109. - The
cooking hobs cooking hobs controller 101 may control the output power or heat level that is generated by thecooking hobs - With the help of the
monitoring device 106 the rising of the liquid level may be detected and awarning signal 111 may be output by thecontrol unit 109. To this end, thecontrol unit 109 after receiving a measureddistance 108 from thedistance sensor 107 may compare the measureddistance 108 to athreshold distance 110. - The
threshold distance 110 may e.g. be predetermined. However, to provide more flexibility and the ability to adapt themonitoring device 106 to different cooking vessels, thethreshold distance 110 may be configurable or thecontrol unit 109 may automatically determine thethreshold distance 110. A user may e.g. indicate that a cooking vessel is placed under thedistance sensor 107. Thecontrol unit 109 may then determine thedistance 108 to the content of the cooking vessel. Thecontrol unit 109 may determine thethreshold distance 110 based on this measured distance. Thecontrol unit 109 may e.g. add a specific amount, e.g. 1 cm, 2 cm, 3 cm, 4 cm or the like to the measureddistance 108 to determine thethreshold distance 110. Another scheme for determining thethreshold distance 110 will be presented and explained with regard toFig. 3 . - The
distance sensor 107 of themonitoring device 106 may e.g. be an ultrasonic-baseddistance sensor 107. As explained above, ultrasonic distance sensors measure a distance by measuring the time of travel of emitted ultrasonic sound waves. As an alternative, thedistance sensor 107 may be anoptical distance sensor 107 like e.g. a stereo camera or a time of flight sensor. - Further, although only one
distance sensor 107 is shown, it is understood, that onededicated distance sensor 107 may be provided for everycooking hob cooker 100. - The
monitoring device 106 further comprises anoptional communication interface 112. Thecommunication interface 112 may be used to communicate data from thecooker 100, i.e. thecontroller 101, to themonitoring device 106, i.e. thecontrol unit 109. The data may e.g. comprise information aboutactive cooking hobs cooker 100. The data may also comprise thewarning signal 111 that may be communicated to thecontroller 101. Thecontroller 101 may then e.g. lower the output power of therespective cooking hob -
Fig. 2 shows a block diagram of amonitoring device 206. Themonitoring device 206 is shown without any cooker. This is to emphasize that themonitoring device 206 may also be provided as separate device that need not necessarily be an integral part of a cooker. Instead the monitoringdevice 206 may e.g. be integrated into a cooker or exhaust hood that may be provided e.g. in a kitchen. - The
monitoring device 206 comprises fourdistance sensors control unit 209. Thecontrol unit 209 may compare the measured distances to thethreshold distance 210. In addition, themonitoring device 206 comprises auser input 218 that is coupled to thecontrol unit 209. - In the
monitoring device 206 every one of thedistance sensors monitoring device 206. Therefore, every one of thedistance sensors control unit 209. Thecontrol unit 209 may then separately monitor the single hobs and provideseparate warning signals 211 for the different hobs. For example different audible signals may be provided as warning signals 211 that identify the respective hob. The position of the respective hob may e.g. be provided to a user as voice output. As an alternative or in addition, thewarning signal 211 may e.g. be provided as a combined audible and visible signal. An audible beeping signal could e.g. alert a user and a visual indication could e.g. indicate the respective hob. For example a single signal, e.g. a light, may be provided for every hob. - The
user input 218 may be used by a user to control themonitoring device 206. The user may e.g. activate themonitoring device 206 via theuser input 218. The user may also initiate themonitoring device 206 such that thecontrol unit 209 measures a distance and stores this distance as the distance to the content of the cooking vessel without the content boiling. This stored distance may then be used as a basis for monitoring overflow. -
Fig. 3 shows a block diagram of another monitoring device, especially thedistance sensor 307 and a mechanicalsensor movement device 320 that carries thedistance sensor 307. - The mechanical
sensor movement device 320 comprises aguide rail 321. Aslide 322 is arranged on theguide rail 321 and carries thedistance sensor 307. It is understood, that any type of drive, e.g. an electric motor with a belt or a threaded spindle may be used to drive theslide 322, although it is not separately shown. - With the mechanical
sensor movement device 320 thedistance sensor 307 may be moved on a linear trajectory e.g. in a plane parallel to thecooker surface 329. The mechanicalsensor movement device 320 is positioned such that thedistance sensor 307 may move over at least one hob of thecooker surface 329. It is understood, that the mechanicalsensor movement device 320 may also be long enough to allow movement of thedistance sensor 307 over two or more adjacent hobs of thecooker surface 329. - In
Fig. 3 anexemplary cooking vessel 328 is placed on thecooker surface 329. For monitoring thecontent 330 of thecooking vessel 328, the monitoring device may determine three distances on the way from one end point to the other end point of theguide rail 321. - The first distance is the maximum measured
distance 325. This distance is the distance from thedistance sensor 307 to thecooker surface 329. The second distance may be the minimum measureddistance 326, i.e. the distance between thedistance sensor 307 and the top edge of thecooking vessel 328. The third distance will then be thecontent distance 327, i.e. the distance between thedistance sensor 307 and thecontent 330 in thecooking vessel 328. - The control unit of the monitoring device may then e.g. calculate the threshold distance based on the minimum measured
distance 326 or on a relationship of the maximum measureddistance 325 to the minimum measureddistance 326. The difference of these values is the approximate height of thecooking vessel 328. The difference of the minimum measureddistance 326 and thecontent distance 327 is the margin that is available for the boilingcontent 330 until it overflows. - For sake of clarity in the following description of the method based
Fig. 4 the reference signs used above in the description of apparatus basedFigs. 1 - 3 will be maintained. -
Fig. 4 shows a flow diagram of an embodiment of a monitoring method for monitoring liquid overflow in acooking vessel 328 on acooking hob cooker 100. - The monitoring method comprises measuring S1 a
content distance 327 between adistance sensor cooking vessel 328 with anultrasonic distance sensor optical distance sensor content distance 327 to athreshold distance warning signal content distance 327 is smaller than thethreshold distance - The monitoring method may comprise translationally moving the
distance sensor cooking hob threshold distance distance 326 measured during a movement of thedistance sensor cooking hob threshold distance distance 326 and a safety margin distance. - The monitoring method may also comprise detecting that a
cooking vessel 328 is placed under thedistance sensor content distance 327. The minimum measureddistance 326 may then automatically be measured after detecting that acooking vessel 328 is placed under thedistance sensor - Although specific embodiments have been illustrated and described herein, it will be appreciated by those of ordinary skill in the art that a variety of alternate and/or equivalent implementations exist. It should be appreciated that the exemplary embodiment or exemplary embodiments are only examples, and are not intended to limit the scope, applicability, or configuration in any way. Rather, the foregoing summary and detailed description will provide those skilled in the art with a convenient road map for implementing at least one exemplary embodiment, it being understood that various changes may be made in the function and arrangement of elements described in an exemplary embodiment without departing from the scope as set forth in the appended claims and their legal equivalents. Generally, this application is intended to cover any adaptations or variations of the specific embodiments discussed herein.
- Thus, the present invention provides a
monitoring device cooking vessel 328 on acooking hob cooker 100, themonitoring device distance sensor cooking hob content distance 327 between thedistance sensor cooking vessel 328, and acontrol unit distance sensor content distance 327 to athreshold distance warning signal content distance 327 is smaller than thethreshold distance cooker 100 and a respective monitoring method. -
- 100
- cooker
- 101
- controller
- 102, 103, 104, 105
- cooking hob
- 106, 206
- monitoring device
- 107, 207, 215, 216, 217, 307
- distance sensor
- 108
- distance
- 109, 209
- control unit
- 110, 210
- threshold distance
- 111, 211
- warning signal
- 112
- communication interface
- 218
- user input
- 320
- mechanical sensor movement device
- 321
- guide rail
- 322
- slide
- 325
- maximum measured distance
- 326
- minimum measured distance
- 327
- content distance
- 328
- cooking vessel
- 329
- cooker surface
- 330
- content
- S1, S2, S3
- method steps
Claims (15)
- Monitoring device (106, 206) for monitoring liquid overflow in a cooking vessel (328) on a cooking hob (102, 103, 104, 105) of a cooker (100), the monitoring device (106, 206) comprising:a distance sensor (107, 207, 215, 216, 217, 307) that is arranged over the cooking hob (102, 103, 104, 105) and that is configured to measure a content distance (327) between the distance sensor (107, 207, 215, 216, 217, 307) and a content of the cooking vessel (328), anda control unit (109, 209) that is coupled to the distance sensor (107, 207, 215, 216, 217, 307) and that is configured to compare the measured content distance (327) to a threshold distance (110, 210) and to output a warning signal (111, 211) if the measured content distance (327) is smaller than the threshold distance (110, 210).
- Monitoring device (106, 206) according to claim 1, comprising a mechanical sensor movement device (320) that carries the distance sensor (107, 207, 215, 216, 217, 307) and is configured to translationally move the distance sensor (107, 207, 215, 216, 217, 307) parallel to a surface of the cooking hob (102, 103, 104, 105),
wherein the control unit (109, 209) is configured to determine the threshold distance (110, 210) based at least on a minimum measured distance (326) measured during a movement of the distance sensor (107, 207, 215, 216, 217, 307) over the surface of the cooking hob (102, 103, 104, 105). - Monitoring device (106, 206) according to claim 2, wherein the mechanical sensor movement device (320) comprises guide rails (321) and at least one slide (322) and an electric drive for moving the at least one slide (322), wherein the distance sensor (107, 207, 215, 216, 217, 307) is arranged on the at least one slide (322).
- Monitoring device (106, 206) according to claim 3, comprising a cooker hood, especially an exhaust hood, wherein the mechanical sensor movement device (320) is arranged in the cooker hood.
- Monitoring device (106, 206) according to any one of the preceding claims, comprising one dedicated distance sensor (107, 207, 215, 216, 217, 307) for every cooking hob (102, 103, 104, 105) of the cooker (100).
- Monitoring device (106, 206) according to any one of the preceding claims 2 to 5, wherein the control unit (109, 209) is configured to determine the threshold distance (110, 210) as being the sum of the minimum measured distance (326) and a safety margin distance.
- Monitoring device (106, 206) according to any one of the preceding claims, wherein the distance sensor (107, 207, 215, 216, 217, 307) comprises an ultrasonic-based distance sensor (107, 207, 215, 216, 217, 307).
- Monitoring device (106, 206) according to any one of the preceding claims 1 to 6, wherein the distance sensor (107, 207, 215, 216, 217, 307) comprises an optical distance sensor (107, 207, 215, 216, 217, 307), especially a camera, especially a stereo camera, or a time of flight sensor.
- Monitoring device (106, 206) according to any one of the preceding claims 2 to 8, wherein the control unit (109, 209) is configured to detect that a cooking vessel (328) is placed under the distance sensor (107, 207, 215, 216, 217, 307) based on the measured content distance (327) and to automatically measure the minimum measured distance (326) after detecting that a cooking vessel (328) is placed under the distance sensor (107, 207, 215, 216, 217, 307).
- Monitoring device (106, 206) according to any one of the preceding claims, comprising a communication interface (112) configured to couple to the cooker (100) and receive information about active cooking hobs (102, 103, 104, 105) of the cooker (100).
- Cooker (100) for cooking content in cooking vessels (328), the cooker (100) comprising:a number of cooking hobs (102, 103, 104, 105) for accommodating the cooking vessels (328),a monitoring device (106, 206) according to any one of the preceding claims.
- Cooker (100) according to claim 11, comprising a controller (101) configured to control the output power of the cooking hobs (102, 103, 104, 105) and provide an information about active ones of the cooking hobs (102, 103, 104, 105) to the monitoring device (106, 206).
- Monitoring method for monitoring liquid overflow in a cooking vessel (328) on a cooking hob (102, 103, 104, 105) of a cooker (100), the monitoring method comprising:measuring (S1) a content distance (327) between a distance sensor (107, 207, 215, 216, 217, 307) and a content of the cooking vessel (328) with an ultrasonic distance sensor (107, 207, 215, 216, 217, 307) or with an optical distance sensor (107, 207, 215, 216, 217, 307),comparing (S2) the measured content distance (327) to a threshold distance (110, 210), andoutputting (S3) a warning signal (111, 211) if the measured content distance (327) is smaller than the threshold distance (110, 210).
- Monitoring method according to claim 13, comprising translationally moving the distance sensor (107, 207, 215, 216, 217, 307) parallel to a surface of the cooking hob (102, 103, 104, 105), and determining the threshold distance (110, 210) based at least on a minimum measured distance (326) measured during a movement of the distance sensor (107, 207, 215, 216, 217, 307) over the surface of the cooking hob (102, 103, 104, 105).
- Monitoring method according to any one of claims 13 and 14, wherein the threshold distance (110, 210) is determined as the sum of the minimum measured distance (326) and a safety margin distance; and/or
wherein it is detected that a cooking vessel (328) is placed under the distance sensor (107, 207, 215, 216, 217, 307) based on the measured content distance (327) and the minimum measured distance (326) is automatically measured after detecting that a cooking vessel (328) is placed under the distance sensor (107, 207, 215, 216, 217, 307).
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP17182622.5A EP3431881B1 (en) | 2017-07-21 | 2017-07-21 | Monitoring device, cooker and monitoring method |
| TR2017/11045A TR201711045A2 (en) | 2017-07-21 | 2017-07-27 | Monitoring device, cooker and monitoring method. |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP17182622.5A EP3431881B1 (en) | 2017-07-21 | 2017-07-21 | Monitoring device, cooker and monitoring method |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3431881A1 true EP3431881A1 (en) | 2019-01-23 |
| EP3431881B1 EP3431881B1 (en) | 2020-12-23 |
Family
ID=59384068
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP17182622.5A Active EP3431881B1 (en) | 2017-07-21 | 2017-07-21 | Monitoring device, cooker and monitoring method |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP3431881B1 (en) |
| TR (1) | TR201711045A2 (en) |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110579317A (en) * | 2019-08-22 | 2019-12-17 | 宁波方太厨具有限公司 | Oil smoke leakage monitoring device and monitoring method of oil smoke purifying device |
| CN110594813A (en) * | 2019-09-05 | 2019-12-20 | 宁波方太厨具有限公司 | Range hood and control method thereof |
| CN110594809A (en) * | 2019-08-22 | 2019-12-20 | 宁波方太厨具有限公司 | Device and method for monitoring backflow and leakage of lampblack purification device |
| CN111578333A (en) * | 2020-04-07 | 2020-08-25 | 宁波方太厨具有限公司 | Cooking device and control method thereof |
| EP3742052A1 (en) * | 2019-05-21 | 2020-11-25 | Whirlpool Corporation | Cooking assistance appliance |
| JP2021116973A (en) * | 2020-01-27 | 2021-08-10 | 株式会社パロマ | Cooking stove system |
| WO2022037883A1 (en) * | 2020-08-18 | 2022-02-24 | BSH Hausgeräte GmbH | Method for monitoring a cooking process, and control device |
| WO2022076013A1 (en) * | 2020-10-06 | 2022-04-14 | Electrolux Home Products. Inc. | Utensil profile determination system |
| WO2022076015A1 (en) * | 2020-10-06 | 2022-04-14 | Electrolux Home Products, Inc. | Assisted cooking |
| EP4001774A1 (en) * | 2020-11-11 | 2022-05-25 | Electrolux Appliances Aktiebolag | System for recording a physical property and cooker hood |
| EP4092334A3 (en) * | 2021-05-21 | 2023-02-22 | Berbel Ablufttechnik GmbH | Fume extractor, especially fume extractor hood |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1505350A2 (en) * | 2003-08-06 | 2005-02-09 | E.G.O. ELEKTRO-GERÄTEBAU GmbH | Device and method for controlling of a cooking system |
| WO2015062666A1 (en) * | 2013-11-01 | 2015-05-07 | Arcelik Anonim Sirketi | Heating cooktop system having advanced cooking process safety control function |
| DE102014114901A1 (en) * | 2014-10-14 | 2016-04-14 | Frima International Ag | Cooking appliance and method for detecting a process parameter of a cooking process |
| DE102015104631A1 (en) * | 2015-03-26 | 2016-09-29 | Miele & Cie. Kg | Method of operating a cooking system |
| EP3112758A1 (en) * | 2015-07-03 | 2017-01-04 | Miele & Cie. KG | Method for operating a cooking system |
-
2017
- 2017-07-21 EP EP17182622.5A patent/EP3431881B1/en active Active
- 2017-07-27 TR TR2017/11045A patent/TR201711045A2/en unknown
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1505350A2 (en) * | 2003-08-06 | 2005-02-09 | E.G.O. ELEKTRO-GERÄTEBAU GmbH | Device and method for controlling of a cooking system |
| WO2015062666A1 (en) * | 2013-11-01 | 2015-05-07 | Arcelik Anonim Sirketi | Heating cooktop system having advanced cooking process safety control function |
| DE102014114901A1 (en) * | 2014-10-14 | 2016-04-14 | Frima International Ag | Cooking appliance and method for detecting a process parameter of a cooking process |
| DE102015104631A1 (en) * | 2015-03-26 | 2016-09-29 | Miele & Cie. Kg | Method of operating a cooking system |
| EP3112758A1 (en) * | 2015-07-03 | 2017-01-04 | Miele & Cie. KG | Method for operating a cooking system |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3742052A1 (en) * | 2019-05-21 | 2020-11-25 | Whirlpool Corporation | Cooking assistance appliance |
| CN110594809A (en) * | 2019-08-22 | 2019-12-20 | 宁波方太厨具有限公司 | Device and method for monitoring backflow and leakage of lampblack purification device |
| CN110579317A (en) * | 2019-08-22 | 2019-12-17 | 宁波方太厨具有限公司 | Oil smoke leakage monitoring device and monitoring method of oil smoke purifying device |
| CN110579317B (en) * | 2019-08-22 | 2021-05-18 | 宁波方太厨具有限公司 | Oil smoke leakage monitoring method of oil smoke purifying device |
| CN110594813A (en) * | 2019-09-05 | 2019-12-20 | 宁波方太厨具有限公司 | Range hood and control method thereof |
| JP7329842B2 (en) | 2020-01-27 | 2023-08-21 | 株式会社パロマ | stove system |
| JP2021116973A (en) * | 2020-01-27 | 2021-08-10 | 株式会社パロマ | Cooking stove system |
| CN111578333A (en) * | 2020-04-07 | 2020-08-25 | 宁波方太厨具有限公司 | Cooking device and control method thereof |
| WO2022037883A1 (en) * | 2020-08-18 | 2022-02-24 | BSH Hausgeräte GmbH | Method for monitoring a cooking process, and control device |
| WO2022076013A1 (en) * | 2020-10-06 | 2022-04-14 | Electrolux Home Products. Inc. | Utensil profile determination system |
| WO2022076015A1 (en) * | 2020-10-06 | 2022-04-14 | Electrolux Home Products, Inc. | Assisted cooking |
| EP4001774A1 (en) * | 2020-11-11 | 2022-05-25 | Electrolux Appliances Aktiebolag | System for recording a physical property and cooker hood |
| EP4092334A3 (en) * | 2021-05-21 | 2023-02-22 | Berbel Ablufttechnik GmbH | Fume extractor, especially fume extractor hood |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3431881B1 (en) | 2020-12-23 |
| TR201711045A2 (en) | 2019-02-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3431881B1 (en) | Monitoring device, cooker and monitoring method | |
| US8563059B2 (en) | Oven and method of operating the same | |
| KR0129239B1 (en) | Cooking device of microwave-oven | |
| SE466418B (en) | METHOD OF EXAMINATION FOR EXAMINATION OF A LIQUID FILLING IN A CONTAINER AND THE DEVICE TO DETERMINE THE LEVEL OF A OR MULTIPLE INTERFACE WITH A WATER FILLING IN A CONTAINER | |
| CN109998377A (en) | Control method, apparatus, computer equipment and the storage medium of fluid flow | |
| US6583392B2 (en) | Apparatus and method for determining properties of a cooktop using ultrasound techniques | |
| EP2530387B1 (en) | A cooking oven including an apparatus for detecting the three-dimensional shape of food stuff on a food stuff carrier | |
| CN105865410A (en) | Altitude height detection method used for cooking utensils, apparatus thereof and cooking utensils | |
| WO2020233927A1 (en) | Laser sensor module with soiling detection | |
| CN109124336B (en) | Cooking control method, cooking control device and pressure cooking appliance | |
| US20230341129A1 (en) | Utensil profile determination system | |
| CN107168410B (en) | Temperature control method of cooker and cooker | |
| CN111854890A (en) | Liquid level position detection device, equipment and water supply equipment | |
| CN110848748A (en) | Gas stove control method and device and gas stove | |
| ES2712694T3 (en) | Procedure to operate a cooking system | |
| JP4799603B2 (en) | Cooker | |
| JP2012151136A (en) | Induction heating cooker | |
| CN111076792B (en) | Photoelectric detection device and method for oil quantity of oil cup in smoke exhaust ventilator | |
| WO2019243149A1 (en) | Laser sensor module with indication of readiness for use | |
| KR101849099B1 (en) | Boil and boil dry detection apparatus | |
| CN110848751A (en) | Gas stove control method and device and gas stove | |
| EP3503672A1 (en) | Induction cooktop | |
| JP2010113846A (en) | Induction heating cooker | |
| CN116570151A (en) | Anti-overflow pot control system and method | |
| WO2018212057A1 (en) | Water level detection device and inductive heating apparatus, and water level detection system equipped with same |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20190715 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20200707 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602017029896 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1348102 Country of ref document: AT Kind code of ref document: T Effective date: 20210115 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210324 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201223 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201223 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210323 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 1348102 Country of ref document: AT Kind code of ref document: T Effective date: 20201223 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20201223 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201223 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210323 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201223 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201223 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201223 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201223 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201223 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210423 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201223 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201223 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201223 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201223 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201223 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201223 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602017029896 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210423 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201223 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201223 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201223 |
|
| 26N | No opposition filed |
Effective date: 20210924 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201223 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201223 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201223 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20210731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210731 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210423 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210721 Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210721 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201223 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20170721 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: TR Payment date: 20230721 Year of fee payment: 7 Ref country code: GB Payment date: 20230920 Year of fee payment: 7 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20230920 Year of fee payment: 7 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201223 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201223 |