EP3228785B1 - Pool cleaning robot and a method for cleaning the pool cleaning robot - Google Patents
Pool cleaning robot and a method for cleaning the pool cleaning robot Download PDFInfo
- Publication number
- EP3228785B1 EP3228785B1 EP17162378.8A EP17162378A EP3228785B1 EP 3228785 B1 EP3228785 B1 EP 3228785B1 EP 17162378 A EP17162378 A EP 17162378A EP 3228785 B1 EP3228785 B1 EP 3228785B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- pool
- cleaning robot
- pool cleaning
- cleaning
- robot
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000004140 cleaning Methods 0.000 title claims description 642
- 238000000034 method Methods 0.000 title claims description 128
- 238000003032 molecular docking Methods 0.000 claims description 126
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 claims description 123
- 230000008569 process Effects 0.000 claims description 99
- 239000012530 fluid Substances 0.000 claims description 61
- 238000001914 filtration Methods 0.000 claims description 56
- 230000003749 cleanliness Effects 0.000 claims description 13
- 238000004891 communication Methods 0.000 claims description 11
- 239000011538 cleaning material Substances 0.000 claims description 6
- 238000003384 imaging method Methods 0.000 claims description 3
- 238000012544 monitoring process Methods 0.000 claims description 3
- 230000003190 augmentative effect Effects 0.000 claims description 2
- 230000009194 climbing Effects 0.000 description 11
- 238000000605 extraction Methods 0.000 description 10
- 238000007667 floating Methods 0.000 description 9
- 230000008093 supporting effect Effects 0.000 description 9
- 230000007246 mechanism Effects 0.000 description 7
- 238000005096 rolling process Methods 0.000 description 7
- 230000000670 limiting effect Effects 0.000 description 6
- 238000012423 maintenance Methods 0.000 description 6
- 239000000463 material Substances 0.000 description 4
- 229920001971 elastomer Polymers 0.000 description 3
- 230000003028 elevating effect Effects 0.000 description 3
- 230000001902 propagating effect Effects 0.000 description 3
- 239000005060 rubber Substances 0.000 description 3
- 230000003068 static effect Effects 0.000 description 3
- 238000004873 anchoring Methods 0.000 description 2
- 239000004760 aramid Substances 0.000 description 2
- 229920003235 aromatic polyamide Polymers 0.000 description 2
- 230000008901 benefit Effects 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 238000001514 detection method Methods 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 239000007788 liquid Substances 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 239000004033 plastic Substances 0.000 description 2
- 229920003023 plastic Polymers 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 230000002829 reductive effect Effects 0.000 description 2
- 230000002441 reversible effect Effects 0.000 description 2
- 238000005507 spraying Methods 0.000 description 2
- 239000000126 substance Substances 0.000 description 2
- 230000009182 swimming Effects 0.000 description 2
- 230000001960 triggered effect Effects 0.000 description 2
- 230000000007 visual effect Effects 0.000 description 2
- OKTJSMMVPCPJKN-UHFFFAOYSA-N Carbon Chemical compound [C] OKTJSMMVPCPJKN-UHFFFAOYSA-N 0.000 description 1
- 101000713935 Mus musculus Tudor domain-containing protein 7 Proteins 0.000 description 1
- 241000656145 Thyrsites atun Species 0.000 description 1
- 238000005299 abrasion Methods 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 238000003287 bathing Methods 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 229910052799 carbon Inorganic materials 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000009977 dual effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000007654 immersion Methods 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 229920003052 natural elastomer Polymers 0.000 description 1
- 229920001194 natural rubber Polymers 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000008520 organization Effects 0.000 description 1
- 229920001296 polysiloxane Polymers 0.000 description 1
- 229920002635 polyurethane Polymers 0.000 description 1
- 239000004814 polyurethane Substances 0.000 description 1
- 238000012913 prioritisation Methods 0.000 description 1
- 230000005855 radiation Effects 0.000 description 1
- 239000012783 reinforcing fiber Substances 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000000452 restraining effect Effects 0.000 description 1
- 239000012781 shape memory material Substances 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 239000007921 spray Substances 0.000 description 1
- 238000003860 storage Methods 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
- 229920003051 synthetic elastomer Polymers 0.000 description 1
- 239000005061 synthetic rubber Substances 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 238000005406 washing Methods 0.000 description 1
Images













































Classifications
-
- E—FIXED CONSTRUCTIONS
- E04—BUILDING
- E04H—BUILDINGS OR LIKE STRUCTURES FOR PARTICULAR PURPOSES; SWIMMING OR SPLASH BATHS OR POOLS; MASTS; FENCING; TENTS OR CANOPIES, IN GENERAL
- E04H4/00—Swimming or splash baths or pools
- E04H4/14—Parts, details or accessories not otherwise provided for
- E04H4/16—Parts, details or accessories not otherwise provided for specially adapted for cleaning
- E04H4/1654—Self-propelled cleaners
Definitions
- a system for cleaning a pool cleaning robot may include a controller, a communication system and a cleaning unit; wherein the communication system may be configured to receive information about a cleanliness of a filtering unit of the pool cleaning robot; wherein the controller may be configured to determine, based on the cleanliness of the filtering unit, a cleaning process to be applied on the pool cleaning process by the system; and wherein the cleaning unit may be configured to apply the cleaning process on the pool cleaning unit.
- the controller may be configured to determine at least one parameter out of (a) a duration of the cleaning process, (b) a duration of one or more phases of the cleaning process, (c) a cleaning material to be used during the cleaning process, and (d) one or more cleaning materials to be used during one or more phases of the cleaning process.
- the cleaning unit may include a cleaning element that may be configured, once positioned within a space surrounded by the filtering unit of the pool cleaning robot, to direct fluid towards an interior of the filtering unit.
- the cleaning element may be anozzled pop-up water jets thrusting sprinkler.
- the cleaning element water jets thrusting power may be augmented using a valve.
- the cleaning element may be an apertured bag.
- the cleaning unit may include a cleaning element manipulator for determining a spatial relationship between the cleaning element and the filtering unit.
- the cleaning element may be rigid.
- the cleaning element may be elastic.
- the cleaning unit may include an additional cleaning element for contacting the interior of the filtering unit during the cleaning process.
- the cleaning unit may include an additional cleaning element for contacting, during the cleaning process, debris that extend from the interior of the filtering unit without contacting the filtering unit.
- the cleaning element once inserted through a first opening of the pool cleaning robot into a space surrounded by the filtering unit of the pool cleaning robot, blocks only a part of the first opening.
- the system may include a sensor that may be configured to sense a cleanliness of a filtering unit of the pool cleaning robot, once positioned within a space surrounded by the filtering unit of the pool cleaning robot.
- a pool cleaning robot for cleaning a pool may include a housing; a first interfacing element may be configured to interface between the pool cleaning robot and a bottom of a pool while the pool cleaning robot cleans the bottom of the pool; and one or more second interfacing elements that may be configured to reduce a friction between the pool and the pool cleaning robot during at least a portion of an exit process in which the pool cleaning robot exits the pool.
- the one or more second interfacing elements may include at least one radially symmetrical rotating element.
- a given second interface of the one or more second interfacing elements may be configured not to contact the bottom of the pool when the pool cleaning robot cleans the bottom of the pool.
- the one or more second interfacing elements may include at least one radially symmetrical rotating element.
- the one or more second interfacing elements may include a radially symmetrical rotating element that may be coupled to an intermediate element, wherein the intermediate element may be configured to move between a first position to a second position thereby changing a spatial relationship between the housing and the radially symmetrical rotating element.
- the movement of the intermediate element can include a movement to any intermediate position between the first and second positions.
- the pool cleaning robot may include an interface manipulator that may be configured to move the intermediate element between the first position to the second position.
- the intermediate element may be rotatably coupled to the housing.
- the intermediate element may be rotatably coupled to the housing by a handle that has an axis of rotation that virtually intersects with a front upper part of the housing.
- the radially symmetrical rotating element may be configured to protrude from the intermediate element during the portion of the exit process.
- the pool cleaning robot according to claim wherein the radially symmetrical rotating element may be configured not to protrude from the intermediate element when the pool cleaning robot cleans the pool.
- the pool cleaning robot may include a sensor and a controller; wherein the controller may be configured to trigger a movement of the intermediate element between the first position and the second position based on signals sent from the sensor.
- the sensor may be a height sensor.
- the sensor may be an out of water sensor that may be configured to sense that at least a portion of the pool cleaning robot exits a water of the pool.
- the pool cleaning robot may include a controller; wherein the controller may be configured to trigger a movement of the intermediate element between the first position and the second position based on signals sent from an external system that may include an external sensor that may be configured to assist in an extraction of the pool cleaning robot from the pool.
- An intermediate element may be mechanically coupled to an external system that may be configured to assist in an extraction of the pool cleaning robot from the pool; wherein the pool cleaning robot may be configured to perform the movement of the intermediate element between the first position and the second position based on a command from the system.
- An intermediate element may be mechanically coupled to the external system via a cable; and wherein the movement of the intermediate element between the first position and the second position may be responsive to a tension of the cable.
- the pool cleaning robot may include a motor that may be configured to assist in propelling the pool cleaning robot during the exit process.
- the pool cleaning robot may include a winch (see for example winch 999 of figure 49 ) that may be configured to propel the pool cleaning robot during the exit process.
- a winch see for example winch 999 of figure 49 .
- the pool cleaning robot may include at least one aperture for draining fluid from the pool cleaning robot during the exit process; and a controller that may be configured to affect a timing of at least one phase of the exit process based upon an estimated or an actual amount of the fluid within the pool cleaning robot.
- the pool cleaning robot may include at least one aperture for draining fluid from the pool cleaning robot during the exit process; and a controller that may be configured to affect a timing of at least one phase of the exit process based upon an aggregate weight of the pool cleaning robot and the fluid within the pool cleaning robot.
- the pool cleaning robot may include a controller that may be configured to prevent a center of the pool cleaning robot from passing an edge of the pool before an amount of fluid that resides in the pool cleaning robot may be below a predefined threshold.
- the one or more second interfacing elements may be configured to reduce a friction between an edge of the pool and the pool cleaning robot during the portion of the exit process.
- At least one of the one or more second interfacing elements may be coupled to a bottom of the housing.
- the pool cleaning robot may include a drive system that may include a main portion and an auxiliary portion; wherein the auxiliary portion may be arranged to move the pool cleaning robot during the portion of the exit process; and wherein the main portion may be arranged to move the pool cleaning robot when the robot cleans the pool.
- a pool cleaning robot for cleaning a pool
- the pool cleaning robot may include a housing; a first interfacing element may be configured to interface between the pool cleaning robot and a bottom of a pool while the pool cleaning robot cleans the bottom of the pool; and an movable handle that may be configured to be coupled, at an anchor area, to an external system interface; wherein the movable handle may be configured to elevate the anchor area during a portion of an exit process in which the pool cleaning robot, with an assistance of the external system, exits the pool; wherein the external system may be positioned outside the pool.
- the pool cleaning robot may include one or more second interfacing elements that may be configured to reduce a friction between the pool and the pool cleaning robot during at least a portion of the exit process.
- the pool cleaning robot may include an interface manipulator that may be configured to move the intermediate element between a first position to the second position thereby changing the distance between the housing and the external system.
- a pool cleaning robot for cleaning a pool may include a housing; a first interfacing element may be configured to interface between the pool cleaning robot and a bottom of a pool while the pool cleaning robot cleans the bottom of the pool; and a second interfacing element that may be configured to interface between the pool cleaning robot and an exterior surface during a portion of an exit process in which the pool cleaning robot exits the pool; and wherein the second interfacing element may be configured not to contact the bottom of the pool when the pool cleaning robot cleans the bottom of the pool.
- a pool cleaning robot for cleaning a pool may include a housing; a first interfacing element may be configured to interface between the pool cleaning robot and a bottom of a pool while the pool cleaning robot cleans the bottom of the pool; one or more second interfacing elements that may be configured to contact an edge of the pool during an exit process during which the pool cleaning robot exits the pool; and an interface manipulator that may be configured to change a spatial relationship between the housing and the one or more second interfacing elements thereby preventing a given second interfacing element of one or more second interfacing elements to contact the bottom of the pool while the pool cleaning robot cleans the bottom of the pool.
- a pool cleaning robot for cleaning a pool may include a housing; a first interfacing element may be configured to interface between the pool cleaning robot and a bottom of a pool while the pool cleaning robot cleans the bottom of the pool; one or more second interfacing elements that differ from the first interfacing element and may be configured to contact an edge of the pool during an exit process during which the pool cleaning robot exits the pool; at least one aperture for draining fluid from the pool cleaning robot during the exit process; and a controller that may be configured to control a timing of at least one portion of the exit process in response to actual or estimated amount of fluid within the pool cleaning robot.
- a system for extraction of a pool cleaning robot from a pool may include a cable that may be arranged to be coupled to a pool cleaning robot during an exit process during which the pool cleaning robot may be extracted from the pool; a cable manipulator for pulling the cable during the exit process; and a controller that may be configured to control the pulling of the cable based on an estimated or an actual amount of the fluid within the pool cleaning robot.
- a method for extracting a pool cleaning robot from a pool may include pulling a cable that may be coupled to the pool cleaning robot during an exit process during which the pool cleaning robot exits the pool; and controlling, by a controller of a system, the cable based on an estimated or an actual amount of the fluid within the pool cleaning robot.
- the system may be positioned at a predefined distance from an edge of the pool.
- the pulling may be executed by a motor and a reel; and wherein a part of the reel may be positioned below the edge of the pool.
- the extraction element may be a cable and the following text refers to a cable. It should be noted that the cable is merely a non-limiting example of an extraction element.
- a pool cleaning robot for cleaning a pool
- the pool cleaning system may include a housing; and a drive system, wheels and/or tracks, cleaning brushes, a pump system, a filtering system, a tethered electrical cable and an electronic control system that may be arranged to move the pool cleaning robot in relation to an environment of the pool cleaning robot.
- the electronic control may receive inputs from sensors and/or accelerometer that govern the performance and environment of the pool cleaning robot.
- a pool cleaning system that comprises a pool cleaning robot in conjunction of a separatecable-reel/winch that is external to the pool and that may be able to autonomously exit the pool cleaning robot from the pool.
- the pool cleaning robot may be coupled to a docking station (also referred to as system or external system) that is located outside the pool) by a cable such as but not limited to an electrical cable that is tethered to the pool cleaning robot on its first end and to a cable reel/ winch on its second end.
- a cable such as but not limited to an electrical cable that is tethered to the pool cleaning robot on its first end and to a cable reel/ winch on its second end.
- the electrical cable may be provided in additional to a cable that is mechanically coupled to the system.
- the docking station is an example of a maintenance system that may perform any type of maintenance operation.
- maintenance operations include cleaning the pool cleaning robot, receiving debris from the pool cleaning robot, shredding debris outputted from the pool cleaning robot, replacing a filter of the pool cleaning robot, loading a filter to the pool cleaning robot, electrically charging the pool cleaning robot, repairing and/or replacing any part of the pool cleaning robot.
- the docking station is configured to receive and/or provide information and/or commands and/or to and/or from the pool cleaning robot.
- the pool cleaning robot may be docked in the docking station or otherwise may be accessible to the maintenance operation. For example, when washing the pool cleaning robot, the pool cleaning robot should be close enough to the docking station in order to be washed by fluid extracted from the docking station.
- the tethered cable or the tethered electrical cable may include reinforcing fiber strands that may comprise aramid strands.
- the cable may be further reinforced internally with additional aramid strands or other carbon type strands in order to withstand the extended stresses on the cable that may cause tearing.
- the pool cleaning system may include the said pool cable-reel/winch that is able to interact both mechanically and electronically with the pool cleaning robot.
- the process of exiting from the pool may direct the pool cleaning robot onto a docking station that may comprise the cable-reel/winch and a power supply and a cable reel/winch drive motor and a control box able to govern the cablereel/winch and communicate with the pool cleaning robot control box by wire or wireless means.
- a docking station may comprise the cable-reel/winch and a power supply and a cable reel/winch drive motor and a control box able to govern the cablereel/winch and communicate with the pool cleaning robot control box by wire or wireless means.
- a manual override handle or other man machine interface may be used to manually reel-in and pull out the pool cleaning robot from the pool.
- the cable reel/winch is an independent system that is not located on a docking station and may comprise the reel, a drive motor, electrical supply and power supply with said independent system is bolted or attached to the ground or another immovable anchoring element so that, for safety reasons, it may not detach and reach the pool water.
- An immovable anchoring element may for example be the wall of a house or a concrete, metal or wooden pole of any solid built construction in the vicinity of the swimming pool.
- a number of pool cleaning robot services may be provided whilst the pool cleaning robot is positioned on a docking station.
- these services are automatic filter replacement and filter clean up as discussed and in US provisional patent application 61/745,556 filing date 22nd December 2012 and PCT patent application PCT/IL2013/051055 filing date 22 nd of December 2013 and US provisional patent 61/992,247 filing date 5/13/2014; Titled: AUTONOMOUS POOL CLEANING ROBOT WITH AN EXTERNAL DOCKING STATION.
- the said pool cleaning robot will autonomously exit the pool and park in the vicinity of the pool edge and may await end user intervention or another pool cleaning cycle.
- the reverse operation of returning the pool cleaning robot to the pool may be also performed.
- the pool cleaning robot will travel from vicinity of pool edge or from the docking station/caddy whilst cable reel/winch releases sufficient slack to tethered cable to reach pool edge.
- the handle therefore performsa dual purpose by being a carrying handle for the end user but that may also serve as an intermediate element that is used toattach the pool cleaning robot to a docking station by means of the electrical power cord.
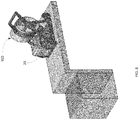
- the pool cleaning robot depicted in figures 1-18 usually travel on the pool floor or climb the pool walls in order to sweep, brush and suck in dirt and debris that are accumulated on the said surfaces and wall.
- the pool cleaning robot is denoted 20
- the intermediate element is a handle that is denoted 12
- an axis of rotation of the handle is denoted 25
- a second interfacing element is denoted 22.
- the cable that is connected between the pool cleaning robot and the docking station (also referred to system or external system) 100 is denoted 50
- the reel of the docking station is denoted 60
- a motor/winch of the docking station is denoted 90.
- the pool cleaning robot is illustrated as including a controller 29, sensor 11 and an aperture 28 for draining fluid.
- the pool cleaning robot may have more than a single sensor, more than a single aperture and the positions of the aperture, controller and sensor may differ from those illustrated in figure 1 .
- the sensor 11 may be floating in the fluid within the pool cleaning robot and his location is indicative of the amount of fluid in the pool cleaning robot.
- the sensor 11 may track after a floating element that floats in the fluid within the pool cleaning robot and the location of the floating element is indicative of the amount of fluid in the pool cleaning robot.
- the sensor may be an optical sensor, a pressure sensor that tracks the fluid within the pool cleaning sensor.
- the pool cleaning robot may include the controller and not the sensor or the sensor and not the controller.
- the docking station is positioned above the external surface 40 and includes a frame 70, wheels 80, lower surface 110 on which the pool cleaning robot 20 can climb and be positioned above.
- the docking station 10 also includes a controller (denoted 102 in figure 7 ) for controlling the exit process.
- the docking system 100 is located within a space 200 formed in the external surface 40 that may be a pool deck, the space 200 may include a sealed cover 202 with a hole and be equipped with cable guiding idler rollers (not shown) in which cable can pass through.
- the bottom of the docking station is located below the edge 35 of the pool and may include a subterranean electrical junction box, a water drain and the like.
- Docking system 100 may include a controller and/or a sensor - but they are not shown for brevity of explanation.
- the pool includes water 10 and a sidewall 30 that interfaces with an external surface 40.
- the motor 90 may be positioned inside the reel (As shown in figure 1 ), outside the rail and be fed by electricity from a mains power outlet, may belong to the robot, the docking station or belong to a third element. Both pool cleaning robot and the docking station may include motors.
- the docking station may be static, may move along the external surface and the like.
- the pool may include or may be connected to stoppers that may prevent the docking station to enter the pool or move beyond the stoppers.
- line 101 of figure 1 may represent a stopper and element 103of figure 7 may represent a fastening element that fastens the docking station to the external surface in any conceivable method.
- exit process of the pool cleaning robot from the pool can be done by using the drive power of the pool cleaning robot and/or the reel of the docking station.
- any phase of the exit process of figures 2-7 may be executed by using the reel and/or the pool cleaning robot.
- the movement of the handle 12 from a closed position to an open position can be triggered by the tension of the cable but may be triggered by sensors such as height sensors, out of water sensor and the like.
- the sensor may be sensor 11 of the pool cleaning robot and/or sensor 92 of the docking station 100.
- the friction between the pool cleaning robot and the edge of the pool is decreased by having second interfacing elements such as wheels or guide wheels or auxiliary wheels 21, 22 and 23 that contact the edge of the pool during parts of the exit process.
- the first interfacing elements are wheels (denoted 13 and 14 in figure 7 ) and/or tracksor any other interfacing elements that interface with the pool during the cleaning process.
- An automatic, self-propelledpool cleaning robot may be governed by a controller (that may be positioned in a water proof box) in which a pre-set software or a manually overridden software set controls, amongst other, its cycle time. At the end of a cleaning cycle time, the pool cleaning robot stops its operation waiting for the end user to pull it out for service or for storage.
- the reeling-in starts at a stage where the pool cleaning robot needs to exit the pool.
- the need may arise due to end of cycle, end of another pre-set period of time or reason such as a full filter bag that needs to be cleaned up or another service event.
- the cleaning program will end and the pool cleaning robot initiates aspecific pool exit program protocol, a wired or wireless message is relayed to the cable reel/winch - wherever it may be positioned or located - so that the reeling-out or extraction process may start.
- the first stage will be to have the pool cleaning robot positioned near the wall in the vicinity where the cable reel/winch is located.
- the pool cleaning robot may actively assist with the floor travelling and extraction process by means of its drive motors.
- the pool cleaning robot may actively assist with the wall travelling and extraction process by means of its pump and drive motors.
- the pool cleaning robot emits wired or wireless communications to the reel/winch constantly sending data regarding its position, bearing and speed of travel
- Figures 1-18 depict the pool cleaning robot as it is beingreeled or pulled out (using a cable) while alsoassisting with the pool climbing to reach the waterline level.
- the cable may be tethered to the pool cleaning robot via its handle.
- Other at least one embodiment may be possible.
- the pulling pressure exerted on the cableand handle may unfold and extend or retractthe handle to a forward and/or upward or outward position whereby the distance between the cable and the pool cleaning robot housing is extended in order toincrease the hoist span angle to be as wide as possible to enablesmooth exiting and traversing of the sharp corner between the wall and the external environment of the pool.
- the foldable/retractable handle 12 movement around the axis of rotation 25 of the handle may be governed by a spring mechanism for deploying and folding the said handle that may be automatic (not shown).
- the handle of the pool cleaning robot will normally be in a folded or a "closed” position whereby the handle arms are fitted and/or locked into dedicated slots on the surface or within thehousing of the pool cleaning robot in a way that does not interfere with normal cleaner operation (not shown).
- the handle will detach or release from the said slots and deploy to a retracted position or an "open" position.
- Such a lock and release mechanism may be spring activated.
- Springs that force a movable element to be in a certain position are known in the art (for example - a spring arrangement of a mouse trap).
- the spring or any other restraining element is overcome and the handle moved to an open position.
- the handle may be configured to move upwards and downwards - instead of rotatably moving. This is illustrated in figures 19-22 .
- the handle 15 may be extended upwards (in relation to the bottom of the housing).
- This handle may include telescopic bars and/or telescopic subsections or any other mechanism for elevating or lowering an anchor area - which is the area that is connected to the cable 50.
- the telescopic handle sections or sub sections may emerge or reenter from or to slots in the housing by means of springs, or other spring like mechanisms, from built-in pipes or tubeslocated within the housing (not shown).
- the telescopic handle may include second interfacing elements such as wheels 21-23 of figure 7 and/or may have one, two or more than three interfacing elements located at the lower and front part of the telescopic handle.
- second interfacing elements such as wheels 21-23 of figure 7
- there may also be provided a combination of handles 12 and 15 - a telescopic upper part and a lower part that may be parallel to or oriented to the telescopic upper part - with one or more second interfacing wheels.
- the bottom of the pool cleaning robot may include second interfacing elements 16.
- the pool cleaning robot electrical power cord connects the docking station to the handle by means a sturdy mechanical attachment, the cable further winds through the internal hollow arms of the handle and eventually exits the handle to connect to the housing and supply electrical power to the pool cleaning robot motors and its control box.
- At least one auxiliaryguide wheel that is integrally attached to the handle and that may be oriented towards the pool floor or wall surfacesor outward fromthe bottom of the pool cleaning housing, may bump out to protrude and make contact with the said wall surfaces.
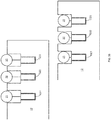
- Figure 26 illustrates pistons 1021, 1022, 1023 located within handle 15 that may move the guide wheels 21, 22 and 23 between an open position in which the guide wheels extend out of handle and between closed position in which the guide wheels do not extend out of handle.
- Said guide wheel may be a set of guide wheels that will form a set of multiple auxiliary foldable and retractable guide wheels to assist with the traversing, exiting and re-entryphases and processes of the pool cleaning robot.
- the guide wheels may simultaneously and progressively exit out from their slots. And vice versa, when folding the handle back into its folded position the guide wheels may simultaneously and progressively reenter into a folded position in the slots (not shown).
- the guide wheels may have varying sizes and may be made of abrasion and chemical resistance natural or synthetic rubber such as polyurethane or silicone. Varying hardness (or softness) may be applied to different guide wheels.
- Additional wheels and / or rollers may be located at the bottom of the housing in order to reduce friction and possible damage to either the pool surfaces/covers or the pool cleaning robot itself.
- the pool cleaning robot may be filled with water and as soon as it reaches the waterline, water will incrementally evacuate the pool cleaning robot housingand it will become heavier as it moves out of water and gravity takes effect.
- the guide wheel will be forced against the corner meeting of the pool wall and external surface. This is the critical event where the reeling-in will utilize maximum energy to be able to cross the corner obstacle while pulling the entire weight of the pool cleaning robot.
- the pool cleaning robot may be further pulled to a parking spot on or near the docking station or caddy or be left to park near or by the pool side.
- the pool cleaning robot may assist with its driving system in order to speed up and facilitate the process.
- a message may be wirelessly transmitted that the pool cleaning robot has exited the pool and is in parking position.
- pool cleaning robot Due to obstacles that the pool cleaning robot may encounter, for example: pool cleaning robot is overweight whilst speed of reeling-out is too fast.
- the interactive communication between the pool cleaning robot and the reel/winch may actuate to implement corrective action measures for example by reducing exit speed or improving exit angle etc.
- a torque sensor, torque transducer or a strain gage may be incorporated onto the motor/winch 90 on the rotating reel for measuring and recording the torqueapplied during the pulling of the pool cleaning robot.
- the controller 102 may receive and compare the data from one or more sensors (of the pool cleaning robot and/or of the docking station) with the preset thresholds for maximum and minimum torques allowed in the controlling of the exit or reentry process.
- the controller may initiate an ON/OFF reeling mode whereby after each reeling and measuring the torque, the reeling will stop to allow for water evacuation from the vertically inclined pool cleaning robot.
- the stop may be replaced by slowing the speed of the exit process - slowing the rotation of the reel.
- the slowing may almost stop the progress of the pool cleaning robot.
- the control process may change the speed of rotation of the reel between more than two speeds during the exit process.
- Any major obstacle encountered may also signal for a temporary stop with back and forth torque testing or even to a reeling full stop sending the pool cleaning robot back into the pool.
- a low torque may be interpreted as a pool cleaning robot travelling horizontally so the reeling may set the rotation to a dead slow pre-set speed; and, vice versa when the pool cleaning robot travels on its own wheels/tracks to exit the docking station or the parking back into the pool.
- the pool cleaning robot travelling may signal the winch to incrementally release cable slack. At the pool edge, the winch will sense the increase weight while descending to the pool and resume an ON/OFF reeling mode until the pool cleaning robot has reentered the pool water and signals minimum torque levels.
- the operation of returning or submerging the pool cleaning robot into the pool is performed in the reverse order whereby this will include a governing pool reentry or reintroduction program protocol at the winch/reel control box.
- the said additional wheels and / or rollers that may be located at the bottom of the housing becomeparticularlyuseful in a wheeled (non-tracked) pool cleaning robot embodiment.
- the said additional wheels may be further driven by means of the onboard pool cleaning robot drive system.
- the docking station/winch and /or pool cleaning robot may be equipped with a buzzer and flashing LED to draw attention that a reeling maneuver is underway.
- Figure 23 illustrates the winch 17 may be included in the pool cleaning robot.
- the winch of the pool cleaning robot may replace the winch of the external system.
- the pool cleaning robot may or may not include the handle.
- Cable 50 is connected between the pool cleaning robot and the external system - it may be fixed to a frame of the external system that may also include an electrical power supply pack.
- the winch may be controlled by the controller 102 of the pool cleaning robot or by the controller of the system.
- pool cleaning robot and the external system may communicate with each other in order to send commands, status indications, sensor readings and the like.
- Figure 24 illustrates pool cleaning robot 20 as including a communication unit 18 and the external system 200 as including a communication unit 108.
- the communication can be wireless and/or wired communication.
- Pool cleaning robot 20 may include one or more of the elements illustrated in the previous figures- such as controller 29 and/or sensor 11.
- External system 100 may include one or more of the elements illustrated in the previous figures- such as controller 102 and/or sensor 92.
- Figure 25 illustrates a pool cleaning robot 20 that includes an interface manipulator 19 for rotating handle 12 about a rotation axis 28.
- the interface manipulator 19 may be a motor that may be controlled by a controller 29.
- Figure 27 illustrates method 200 according to an example.
- Method 200 may include step 210 of pulling a cable that may be coupled to the pool cleaning robot during an exit process during which the pool cleaning robot exits the pool.
- Step 210 may be followed by step 220 of controlling, by a controller of a system and/or the pool cleaning robot, the pulling of the cable based on an estimated or an actual amount of the fluid within the pool cleaning robot.
- the system may be positioned at a predefined distance (for example between 30 centimeters and 2 meters or more) from an edge of the pool. No part of the system may be directly above the water of the pool.
- the pulling may be executed by a motor and a reel; and wherein a part of the reel may be positioned below the edge of the pool. See, for example, system 200 of figures 7-18 .
- forcing the water to exit the pool cleaning robot during an exit process from the pool may speed up the exit process and may reduce a load imposed, during the exit process, on the pool cleaning robot and/or a docking station that may participate in the exit process.
- a third device may participate in the pool exit process.
- the load may be reduced by allowing the pool cleaning robot to depart from the sidewall of the pool.Instead of trying to rotate the pool cleaning robot from a vertical position (when climbing a vertical sidewall of the pool) the pool cleaning robot is allowed to depart from the sidewall of the pool and start the exit process while being non-vertical. This reduces the force that is required to apply when the pool cleaning robot exits the pool.
- an impeller of the pool cleaning robot is rotated at a first direction thereby causing the water to enter through a first opening, (optionally pass through a unidirectional valve), pass through the filtering unit (to be cleaned) and then exit through a second opening.
- the pool cleaning robot may force the water (inside the pool cleaning robot) to exit the pool cleaning robot by reversing the direction of rotation of the impeller. Accordingly, the impeller will be rotated at a second direction (opposite or counter to the first direction).
- Rotating the impeller at the second direction may cause the water within the pool cleaning robot to exit through the first opening - in case where the water can exit from the first opening. For example - when there is no unidirectional valve that prevents the passage of the water from the filtering unit to the first opening.
- Rotating the impeller at the first direction may cause the water to exit through one or more other openings.
- the water may exit the pool cleaning robot as a water jet or in any other manner.
- Figures 29 and 30 illustrate jets of water 501 that exit from the pool cleaning robot from one or more openings (not shown).
- openings through which jets of water may exit are illustrated in US patent application serial number 2014/0230168 which is incorporated herein by reference in its entirety.
- Figures 32 and 33 illustrate a rear door 27 that once opened allows the water to exit the pool cleaning robot through the rear door.
- the openings may be formed in any part of the pool cleaning robot, may be of any shape and/or size.
- an opening through which water may exit may be positioned at the bottom of the housing, at the top of the housing and/or at any sidewall of the housing.
- Any opening through which the water may exit may be continuously opened, may be opened only under certain circumstances (for example opened when the pool cleaning robot is at least partially outside the water, when the pool cleaning robot is at certain angle in relation to the horizon, and the like), may be closed while the pool cleaning robot is submerged and cleans the pool, and the like.
- Each opening may be covered by a cover and/or seal and/or a door for closing the opening.
- Figure 28 illustrates method 300 according to an example.
- Method 300 starts by step 310 of determining to start a pool exit process.
- the pool exit process may start when the pool cleaning robot already climbed at least some of the sidewall of the pool.
- the pool cleaning robot may have reached the waterline, may be positioned at a predefined distance below the waterline (for example 5,10, 15, 20, 25, 30, 35, 40 centimeters below the waterline), may be partially above the waterline (a part of the robot may be above of the waterline), may be positioned at a certain position in relation to the edge of the pool, in relation to the bottom of the pool, at the bottom of the pool and the like.
- Step 310 may include determining to start the pool exit process at a predefined period (for example one or few minutes) before an end of a cleaning cycle.
- - step 310 may be responsive to the state of the pool cleaning robot (end of cycle time, cleanliness of the filtering unit, an occurrence of a malfunction, sensing a certain high or low pressure/load of any other condition, such as the entering of a person to swim in the pool, that may require the pool cleaning robot to exit the pool.)
- - step 310 may include determining to exit the pool when a filter bag is sensed to be unclean, partially clogged or clogged and/or wherein the pool cleaning robot senses that there is a mechanical difficulty.
- the filtering unit may include one or more filters and the cleanliness of the filtering unit may include the cleanliness of the one or more filters.
- Step 310 may also include determining to start the pool exit process when people enter the pool (their presence may be sensed by a sensor such as a pool sensor), when a person requests (for example by remote control) that the pool cleaning robot exits the pool and the like.
- the position of the pool cleaning robot may be sensed by a height sensor, by a water pressure sensor, or by any one or more other sensors.
- the location of the pool cleaning robot in relation to the bottom of the pool may be determined by sensing that the robot started to climb a sidewall (for example by an accelerometer, by sensing the load imposed on the motor by or any other angle sensor) and measuring the distance that pool cleaning robot passes from the beginning of the climbing.
- the distance may be measured by sensing time and/orvelocity of the pool cleaning robot, by counting the rotations of the motor engine or wheel or any driving element of the pool cleaning robot).
- the position of the pool cleaning robot may be sensed by a sensor that differs from the pool cleaning robot.
- the sensor may be located within the pool, connected to the pool and/or positioned in proximity to the pool and/or positioned in any location that may cover the pool or at least an area of the pool from which the pool cleaning robot may exit the pool.
- the sensor may be positioned at an area that is close to an external docking station at a certain distance (for example 5,10, 15, 20, 25, 30, 35, 40 centimeters below the waterline) below the edge of the pool.
- the sensor may belong to the docking station.
- the sensor may sense the location of the pool cleaner using image processing, magnetic or other proximity sensing, acoustic processing and the like. Once sensing that the pool cleaning robot reached a location that should trigger the pool exit process the unit may inform the pool cleaning robot to start the pool exit process.
- the preliminarypool exiting procedure may start with the electrical cord starting to pull the pool cleaner (cord becomes tense) while it is still somewhere at the bottom of the pool busy with its cleaning cycle time.
- the endeavor is to bring the cleaner near the meeting point between floor and wall, in the area and, importantly, in the vicinity of the docking station that serves as the optimal exit point en route to the docking station.
- the cord may then loosen up to allow the pool cleaner to start climbing the wall.
- Step 310 may be followed by step 320 of stopping, by the pool cleaning robot, the climbing on the sidewall of the pool and disengaging from the sidewall of the pool.
- Step 320 may include stopping the pump motor from operating in a first mode during which the pool cleaning robot climbs on the sidewall of the pool. In this mode the pump motor rotates an impeller at a first direction thereby causing water to be sucked to the pool cleaning robot through a first opening and assisting in maintaining the pool cleaning robot in contact with the sidewall of the pool.
- Stopping the pump motor from operating in the first mode causes the pool cleaning robot to disengage from the sidewall of the pool. (See figure 29 ).
- Step 320 may be followed by step 330 of forcing water to exit from the pool cleaning robot.
- Step 320 may be followed by step 330 after a predefined period lapsed from the beginning of step 320.
- the predefined period may have any value, it may range between 0.1 and 30 seconds but may be more than 30 seconds.
- the pool cleaning robot may be detached from the sidewall of the pool.
- Step 330 may include operating the pump motor at a second mode during which the pool cleaning robot expels water and floats on the water (at the waterline).
- the pump motor rotates the impeller at a second direction that is opposite to the first direction. This causes water to exit through one or more openings of the pool cleaning robot.
- Step 330 may also include allowing air to enter the pool cleaning robot. The air may be sucked by the impeller.
- Step 330 may be followed by step 340 of estimating or checking whether the pool cleaning robot to be light enough to enable the pool cleaning robot to exit the pool.
- the pool cleaning robot may be light enough when it expelled all or a substantial quantity of the water in the pool cleaning robot and/or when the weight of the water within the pool cleaning robot is below a water weight threshold and/or when the overall weight of the pool cleaning robot and the water within the pool cleaning robot is below an overall pool cleaning robot weight.
- the water weight threshold and/or the overall pool cleaning robot weight or any other criterion related to the exit of the pool cleaning robot from the pool may be set by an operator of the pool cleaning robot, by a manufacturer of the pool cleaning robot, and the like.
- the checking may include using a group of one or more sensors. At least one sensor of the group may be included within the pool cleaning robot (see for example sensor 11 of figure 7 and 32 ).
- At least one sensor of the group may be located elsewhere (see for example sensor 92 of figures 2-3 and 32 ).
- the estimating may include estimating that the pool cleaning robot is light enough by tracking the progress of the exit process and estimating the amount of water that was drained from the pool cleaning robot. For example- measuring how long the pool cleaning robot was floating, how long the pool cleaning robot was at different positions (for example - the positioned illustrated in figures 29 , 30 , 31 , 32 and 33 ) may indicate the amount of water that was expelled - and thus the amount of water that still exists in the pool cleaning robot.
- the estimation may be based on the time lapsed from the beginning of the pool exit process (of time lapsed from any point of the pool exit process). This time may be compared to a predefined period of time that were found to provide adequate water expelling.
- step 340 is followed by step 330.
- Step 330 and/or step 340 may be executed by the pool cleaning robot (for example by controller 29 of figure 32 ), by the docking station (for example by controller 102 of figure 32 ), by both the pool cleaning robot and the docking station and the like.
- the weight of the pool cleaning robot may be sensed (directly or indirectly) by sensor 92 of the docking station. Indirectly sensing may involve sensing the torque and/or strain of cable 50.
- the detection signals of sensor 92 may be sent to the pool cleaning robot that may determine whether the pool cleaning robot is light enough.
- controller 102 may determine whether the pool cleaning robot is light enough and send the determination to whether the pool cleaning robot is light enough.
- sensor 11 may sense (directly or indirectly) the weight of the pool cleaning robot. Indirectly may mean that sensor 11 senses the amount of fluid within whether the pool cleaning robot is light enough (for example, by means of two water sensing electrodes).
- the detection signals of sensor 92 may be processed by controller 29 and/or may be sent to the docking station that will determine whether the pool cleaning robot is light enough.
- the docking station may weigh the pool cleaning robot when the pool cleaning robot is located in the docking station. This weight measurement may be used to evaluate whether the pool cleaning robot was really light enough - and may be used for adjusting step 340. For example- the duration of step 330 may be shortened if the weight of the pool cleaning robot is below the overall weight threshold. Yet for another example -the duration of step 330 may be increased if the weight of the pool cleaning robot is above the overall weight threshold.
- step 340 is followed by step 350 of completing the pool exit process.
- Method 300 may include step 380 of pulling the pool cleaning robot towards the docking station.
- Step 380 may be executed by the docking station and/or by the pool cleaning robot.
- Step 380 may be executed during at least one or more parts of steps 340, 340 and 350.
- Step 380 may include assisting, by the docking station, the pool cleaning robot to pass the edge of the pool and move towards the docking station. See, for example, figures 33 and 34 .
- Method 300 may also include step 390 of operating the drive system of the pool cleaning robot.
- Step 390 may be executed in parallel to at least one or more parts of steps 330, 340 and 350.
- Step 390 may include changing a speed of propagation of the pool cleaning robot during the pool exit process.
- the velocity of propagation of the pool cleaning robot may be increased during step 350 (in comparison to the velocity of propagation during steps 330 and 340).
- the drive system of the pool cleaning robot may perform multiple corrective changes of direction (back and forth).
- the pool cleaning robot may be maintained at the same position - and the driving system of the pool cleaning robot may provide enough drive to maintain the pool cleaning robot at that position - without slipping into the pool.
- the pool exit process, a pool re-entry process and/or the progress of one or more steps of method 300 may be assisted by reading information received from one or more sensor.
- step 310 may start when the pool cleaning robot is at a certain position, the pool cleaning robot may enter or exit space 200 and/or enter or exit the docking station 200, the cover 202 may be positioned in one or more positions based on sensor readings.
- Figure 39 illustrates water 10 of a pool, a sidewall 30 of a pool, an external surface 40 of the pool, space 200, docking station 100 included in space 200, pool cleaning robot 20, cover 202 and multiple sensors 801, 802, 803, 804, 805, 806, 807 and 808 according to various embodiments of the invention.
- Sensors 801-808 illustrates various examples of locations of sensors - sensor 801 is located within sidewall 30 and/or connected to sidewall 30 and may sense the location of the pool cleaning robot 20 within the water of the pool.
- Sensor 802 is located within external surface 40 and/or attached to the external surface 40.
- Sensor 803 is located above the external surface 40.
- Sensor 804 is positioned after space 200.
- Sensor 807 is attached to cover 202 and/or embedded to the cover 202.
- Sensor 804 is positioned above cover 202.
- Sensor 804 is located above the pool.Each one of sensors 802, 803, 804, 805 and 807 may sense the movement of the pool cleaning robot 20 on the external surface 40 and/or the climbing of the pool cleaning robot 20 on the edge of the pool. Sensors 804 and 805 may also sense the movement of the pool cleaning robot 20 within the pool.
- Sensors 808 is located within space 200 and sensor 806 is part of the docking station 200 (or attached to the docking station) and may sense the movements of the pool cleaning robot 20 within space 200.
- Sensors 801-808 may be image sensor, visual sensor, acoustic sensors, radiation based sensors, radio frequency sensors, acoustic sensor, magnetic sensors and the like.
- Figure 39 also illustrates an external controller 810 (external in the sense that the external controller does not belong to the pool cleaning robot 20 and does not belong to the docking station 100)- that may participate in controlling the exit of the pool cleaning robot 20 from the pool, the entering of the pool cleaning robot 20 to space 200, the movements of cover 202, the operation of the docking station, and the like.
- an external controller 810 external in the sense that the external controller does not belong to the pool cleaning robot 20 and does not belong to the docking station 100- that may participate in controlling the exit of the pool cleaning robot 20 from the pool, the entering of the pool cleaning robot 20 to space 200, the movements of cover 202, the operation of the docking station, and the like.
- cover 202 may include a buzzer and/or a flashing LED to draw swimmers attention to when a cover opening or closing manoeuvre is underway.
- External controller 810 may receive information from either one of sensors 801-808 and/or from the pool cleaning robot 20 and/or from the pool cleaning robot 20 and control the pool exit process, a pool re-entry process, the cleaning of pool cleaning robot 20 or any maintenance operation performed by the docking station 100.
- the external controller 810 may receive weight and/or stress reading and determine whether the pool cleaning robot 20 may exit the pool.
- Figures 47A and 47B illustrate pool cleaning robot 20 according to an example.
- Figure 47A shows a pool cleaning robot 20 that includes controller 29, housing 222, an impeller 651, a pump motor 652, filtering unit 618, rear door 27, drive motor 654, valve 614, wheels 13 and 14 and openings such as first opening 612 and second opening 653.
- Pool cleaning robot 20 may or may not include any component illustrated in any of the figures as belonging to the pool cleaning robot.
- the pump motor 652 may rotate the impeller 651 at a first direction thereby forcing fluid to enter the pool cleaning robot from first opening 612, pass through valve 614 be filtered by filtering unit 618 (includes one or more filters) and exit the pool cleaning robot via second opening 653.
- filtering unit 618 includes one or more filters
- the pump motor 652 may rotate the impeller 651 at a second direction (opposite to the first direction) thereby forcing fluid to enter the pool cleaning robot 20 from second opening 653, and exit through the thirdopening 27' that is selectively covered by rear door 27.
- valve 614 In a pool cleaning robot 200 that does not include valve 614 (or otherwise allows fluid to exit the pool cleaning robot via the first opening 612, and when operating at the second mode the impeller 651 may force fluid to enter the pool cleaning robot 20 through the second opening 653 and exit through the first opening 612.
- Figure 47B illustrates a pool cleaning robot 20 that includes additional openings such as fourth opening 656 and a fifth opening 655.
- Fourth opening 655 may be formed at one side of the pool cleaning robot 20 while another opening (not shown) may be formed at an opposite side of The pool cleaning robot 20.
- the pool cleaning robot 20 may have multiple openings that may be located at any location of the housing 222 and may have any shape and size. These openings may be used for jetting fluid (see jets 501 of figure 10 ) that may also assist in driving and/or maneuvering the pool cleaning robot 20.
- Each opening may be preceded by a fluid conduit and/or a fluid manipulator for selectively driving fluid through the opening. See, for example, the different openings for jetting water and the fluid manipulation components of US patent application serial number 2014/0230168 which is incorporated herein by reference in its entirety.
- FIGS 48A, 48B and 48C illustrate pool cleaning robot 20 according to at leastone embodiment of the invention.
- Figure 48A illustrates a pool cleaning robot 20 that includes controller 29, housing 222, an impeller 651, a pump motor 652, filtering unit 618, rear door 27, third opening 27', drive motor 654, wheels 13 and 14 second opening 653 and fluid control unit 617.
- Fluid control unit 617 control the passage of fluid through the first opening 617.
- the fluid control unit 617 allows the passage of water into the pool cleaning robot 20 (through first opening 612) and prevents the passage of fluid from the pool cleaning robot 20 to the pool (through first opening 612).
- the fluid control unit 617 may prevent the passage of fluid into the pool cleaning robot 20 through first opening 612.
- the fluid control unit 617 may include valve that may be operate as a uni-directional valve such as a flexible rubber or as a seal.
- the fluid control unit 617 may include a stopper or limiter 618 for preventing the valve 614 from opening when the pool cleaning robot 20 is operated at the third mode.
- Figures 48A-48C illustrate a limiter 618 that may rotate about an axis and selectively prevent valve 614 from opening or not prevent valve 614 from opening.
- Figure 48A illustrates the pool cleaning robot 20 when operating at the first mode while figures 48B and 48C illustrate the pool cleaning robot 20 when operating at the second or third mode.
- Pool cleaning robot 20 may or may not include any component illustrated in any of the figures as belonging to the pool cleaning robot.
- the pump motor 652 may rotate the impeller 651 at a first direction thereby forcing fluid to enter the pool cleaning robot from first opening 612, pass through valve 614 be filtered by filtering unit 618 (includes one or more filters) and exit the pool cleaning robot via second opening 653.
- filtering unit 618 includes one or more filters
- the pump motor 652 may rotate the impeller 651 at a second direction (opposite to the first direction) thereby forcing fluid to enter the pool cleaning robot 20 from second opening 653, and exit through the third opening 27' that is selectively covered by rear door 27 or through any unidirectional valve such as a flexible rubber or a seal mentioned above.
- the pool cleaning robot may operate at a third mode and continue to rotate at the first direction (as of the first mode) while preventing water from exiting through the first opening.
- Figures 29-34 illustrates various phases in the execution of method 300.
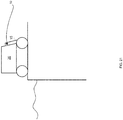
- Figure 29 illustrates pool cleaning robot 20 that is floating (the rear end of pool cleaning robot 20 is above the waterline 16) and is spaced apart from the sidewall 30 of the pool.
- Cable 50 (that connects the handle 12 of the pool cleaning robot 20 to docking station 100) is not tense and the handle 12 is in a closed position.
- Figure 29 also illustrates jets of water 501 that are expelled from pool cleaning robot 20, water 10 in which most of pool cleaning robot 20 is immersed), external surface 40 and pool edge interfacing elements 530 (such as wheels or tubes located at a central area of the bottom of pool cleaning robot 20).
- the docking station is illustrated as including reel 60 and wheel 80.
- Figure 30 illustrates pool cleaning robot 20 that is floating (rear top edge is above waterline 16) and is spaced apart from the sidewall 30 of the pool. Cable 30 connects a third interfacing element (such as anchor 510) to a docking station 100 is not tense.
- a third interfacing element such as anchor 5
- Anchor 510 interfaces between cable50 and pool cleaning robot 20.
- the top edge of anchor 510 may or may not be positioned above the housing of pool cleaning robot 20.
- Anchor 510 may or may not be connected to the top of the housing of pool cleaning robot 20. The cable may be threaded through the interface.
- Figure 30 also illustrates jets of water 501 that are expelled from pool cleaning robot 20, water 10 in which most of pool cleaning robot 20 is immersed).
- the docking station 100 is positioned within space 200 that may be covered by cover 202.
- An aperture 203 may be formed within the cover 202 and cable 50 may pass through aperture 203.
- Cover 202 may be located at the same height as external surfaced 40 or may be located at a different height. Cover 202 can be a continuous cover or may include multiple apertures. Cover 202 may be a mesh or may have any shape and size.
- Cover 202 may open in various manners. For example, one edge of the cover may be elevated while another edge of cover 202 may maintain at the same height. Both edges of the cover may be elevated, the cover may be coupled (in a detachable or non-detachable manner) to the external surface 40 (or any other element).
- the cover 202 may slide along substantially horizontal tracks, may be rolled on a reel, and the like.
- the cover surface may be flush with 40.
- the configuration illustrated in figure 30 is beneficial in the sense that when the cover 202 is closed the cover 202 does not form an obstacle and does not disturb people from walking near the edge of the pool.
- the cover 202 may include one or more solar panels.
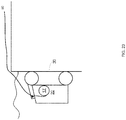
- Figure 31 illustrates pool cleaning robot 20 that is floating (most of pool cleaning robot 20 is above waterline 16) and is proximate (for example- between 1-15 centimeters) to the sidewall 30 of the pool. Cable 50 is tense. Anchor 510 is bent towards docking station 100. Pool cleaning robot 20 is in a horizontal position.
- Figure 32 illustrates pool cleaning robot 20 that is partly outside the water 10 of the pool and is positioned in a first intermediate positon in which water can be drained from the pool cleaning robot 20.
- a front area of the bottom of the pool cleaning robot contacts the edge 35 of the pool.
- the front area precedes second interfacing elements 530.
- the pool cleaning robot 20 is tilted - the front edge of pool cleaning robot 20 is higher than edge 35 of the pool while the rear edge of the pool cleaning robot 20 is submerged and is lower than the edge 35 of the pool.
- a rear door 27 is partially submerged and is open- is detaches from the housing (for example by gravity) and the water may be drained through rear door 27.
- the door 27 may be pivotally coupled to the housing. See, for example door 908 of US patent application serial number 2014/0230168 .
- Figure 32 illustrates pool cleaning robot 20 as further including (a) controller 29 for controlling the operation of pool cleaning robot 20, (b) sensor 11, and (c) communication module 18.
- Figure 32 illustrates docking station 100 as further including controller 102 and sensor 92.
- Docking station 100 is located within space 200.
- Figure 33 illustrates pool cleaning robot 20 thatis partly outside the water of the pool (most of the pool cleaning robot 20 is outside the water - the rear bottom part of pool cleaning robot 20 is submerged).
- Pool cleaning robot 20 is positioned in a second intermediate positon in which water can be drained from the pool cleaning robot.
- Second interfacing element 530 of the pool cleaning robot contacts the edge 35 of the pool.
- Docking station 100 is located within space 200.
- Figure 34 illustrates pool cleaning robot 20 that is completely outside the water 10 of the pool but is closer to the edge 35 of the pool than to the docking station 100 according to an example.
- Pool cleaning robot 20 propagates by means of its own drive system on external surface 40 and cable 50 may not befully tensed but may be partially or fully tensed.
- Docking station 100 is located within space 200.
- FIGS 30-34 illustrated a docking station 100 that was positioned below the edge of the pool and figure 29 illustrated a docking station that was positioned above the edge of the pool - these are merely non-limiting examples of the position of the docking station.
- the pool exit process may be executed with any docking stations that are positioned at any location or distance from the pool edge.
- Figures 35 and 36 illustrate pool cleaning robot 20 and docking station 100 according to an example.
- the docking station is a "underground” or “concealed” docking station that is positioned within a space 200 that is covered by cover 202.
- the cover 202 may be rotated at one end by first motor 540 and may be elevated at another end by rod 560 that is moved by a second motor 550.
- first motor 540 performs a rotational movement while second motor 550 performs a linear movement.
- the cover 202 is positioned at the OPEN position by a coordinated movements induced by first and/or second motors 540 and 550. It is noted that the cover 202 may be positioned in the OPEN position by a movement of only one of the motors.
- the cover 202 may be hinged and moved to the OPEN position by elevating one side (as shown in figure 35 ) or more sides of the cover 202.
- first motor 540 may be replaced by rod 560 and second motor 550 thereby elevating the entire cover 202.
- Any combination of motors and interfacing elements may be used for moving the cover 202 between an OPEN and CLOSED positions.
- the cover 202 may be moved between multiple positions as long as one or more positions will allow pool cleaning robot to enter space 200 and one or more other positions will allow cover 202 to at least a partially close space 200. See, for example, figures 40 , 41 , 42 , 43 and 44 .
- cover 202 may move between the OPEN and CLOSED positions by rotation, by a horizontal movement, by rolling cover onto a reel, and the like.
- Cover 202 may be rigid or flexible. When flexible, cover 202 may be supported by structural elements (such as rods or bars). The structural elements may be static or may move from an OPEN position to a CLOSED position. The structural elements may slide in or outside of the sidewalls of space 200.
- structural elements such as rods or bars. The structural elements may be static or may move from an OPEN position to a CLOSED position. The structural elements may slide in or outside of the sidewalls of space 200.
- cover 202 and/or the combination of cover 202 and the structural elements may withstand a person that steps on cover 202 and/or may run or jump on cover 202.
- First and second motors 540 and 550 may be controlled by pool cleaning robot 20 (controller 29 may send control signals), may be controlled by docking station 100 or may be controlled by any other controller (not shown).
- the first and second motors 540 and 550 may be controlled based on one or more sensors. These one or more sensors may sense the movement induced by the first and/or second motors.
- the one or more sensors may sense that pool cleaning robot 20 is approaching the cover 202, that the pool cleaning robot 20 entered space 200, that the pool cleaning robot 20 is moving towards an exit of space 200, and the like.
- These one or more sensor may be embedded in the external surface 40, in the sidewalls of space 200, in the docking station and the like.
- These one or more sensors may be image sensor, visual sensors, magnetic sensors, weight sensors, accelerometers, proximity sensor and the like.
- Figure 35 illustrates an inclined interface 580 that has a top edge that interfaces with the top of external surface and a bottom edge that is located at the level of the bottom of the docking station 100. It is noted that the top and bottom edges may be positioned at heights that differ from those illustrated in figure 35 .
- Inclined interface 580 may or may not include a linear or non-linear surface, may or may not be curved, may be smooth (see figure 36 ) or may be non-smooth (see figure 35 ) and/or may or may not include (or be connected to) steps, grooves, protuberances, and the like.
- a non-smooth inclined interface may reduce the chance that pool cleaning robot 20 will slip downwards and/or may ease the climbing of pool cleaning robot 20 on the inclined interface 580.
- the inclined surface may contact the docking station 100 and/or may be spaced apart from the docking station.
- Figure 29 also illustrates a fluid system 590 that is positioned below the docking station 100.
- Fluid system 590 may be a drainage system that may drain water that is still in the pool cleaning robot 20 and/or drain water orother fluid after the water or other fluid cleans the pool cleaning robot.
- Fluid system 590 (especially when operating as a drainage system) may be preceded by a shredding system (not shown) for shredding debris extracted from pool cleaning robot 20 or from a used filter extracted from pool cleaning robot 20.
- a shredding system (not shown) for shredding debris extracted from pool cleaning robot 20 or from a used filter extracted from pool cleaning robot 20.
- fluid system 590 may be used for providing fluid or water to the docking station 100 and/or may be used for cleaning pool cleaning robot 20.
- Figures 40A and 40B illustrate water 10 of a pool, sidewall 30 of a pool, external surface 400 of the pool, space 200, docking station 100, pool cleaning robot 20 and cover 202 according to an example.
- Cover 202 is moved by cover motor 702 within and out of opening 704 between an OPEN position (40B) and a CLOSED position (40A). Cover 202 performs a linear movement but any other movement may be provided.
- the pool cleaning robot 20 When in OPEN position the pool cleaning robot 20 may enter space 200 and reach docking station 100.
- Cover 202 may be moved by more than a single engine.
- Rails and/or other support elements may be positioned within space 200 and may support cover 202.
- Opening 704 may include rails, and the like.
- Figures 41A and 41B illustrate water 10 of a pool, sidewall 30 of a pool, external surface 400 of the pool, space 200, docking station 100, pool cleaning robot 20 and cover 202 according to an example.
- Cover 202 is flexible and can be rolled by rolling unit 710 between an OPEN position (41B) and a CLOSED position (41A).
- the rolling unit may have a rolling drum.
- Rolling unit 710 may include a motor and a rolling mechanism.
- the cover 202 may or may not be supported by supporting elements such as rods 714.
- Rods may be constant or may move within or outside space 200.There may be a single supporting element and/or more than two supporting elements.
- the supporting elements may be of any shape and/or size.
- Figures 42A and 42B are top views of space 200 according to various embodiment of the invention.
- Figure 42A shows either fixed rods 714 or rods at their supporting position.
- Figure 42B illustrates three rods 714 that are at their supporting position but may be moved to a concealed (or non-supporting) position by motors 716.
- the motors may move rods 714 within or outside openings 718 formed in the exterior of the pool.
- the rods 714 are shown as being normal to the longitudinal axis of space 200- but there may be any spatial relationship between the rods and space.
- rods 714 may be vertical and connected to the bottom of space 200.
- Figures 43A, 43B, 43B and 43D illustrate various covers 202 according to various embodiment of the invention.
- Cover 202 may be a mesh or an aperture net (43A).
- Cover 202 may include a fixed part 2023 and two movable parts 2021 and 2022 (closed position- figure 43B ) that may be moved (linear movements - 43D, rotational movement - 43C or any other combination of movements) that may be moved between different positions thereby closing space 200 or only partially closing space 200.
- the cover 202 may include any combination of parts that may be able to move in order to selectively open and close space 200.
- Figures 44A and 44B illustrate water 10 of a pool, sidewall 30 of a pool, external surface 400 of the pool, space 200, docking station 100, pool cleaning robot 20, cover 202 and an elevator 660 according to various embodiment of the invention.
- the elevator 600 includes an elevator shaft 665, an elevator interface 661 for supporting the pool cleaning robot and a movement mechanism (illustrated as including motor 664 and ropes or stick 662) for moving the elevator interface 661 within the elevator shaft 665 between an upper position for receiving the pool cleaning robot 20 from external surface 40 (44A) and a lower position for providing the pool cleaning robot to the docking station 100 (44B) -and vice versa.
- a movement mechanism illustrated as including motor 664 and ropes or stick 662 for moving the elevator interface 661 within the elevator shaft 665 between an upper position for receiving the pool cleaning robot 20 from external surface 40 (44A) and a lower position for providing the pool cleaning robot to the docking station 100 (44B) -and vice versa.
- Figure 37 illustrates a pool cleaning robot 20 according to an example.
- Figure 37 illustrates a pool cleaning robot 20 that include a third interfacing element such as anchors 510 and 511.
- Anchor 511 is a spring or may include a spring that can be attached to the pool cleaning robot 20 and to cable 50.
- Anchor 510 may be elastic or plastic and figure 37 illustrates an elastic anchor.
- Figure 37 illustrates rod-shaped anchors but anchors 510 and 511 may have any shape including that of a partly-round or square handle (not shown)that maybe constructed of elastic or plastic stiff/semi-rigid material or of a spring mechanism or a combination of both anelastic and a spring that are bendable wherebyall anchor embodiments are constructed using shape-memory material technologies.
- Anchors 510 and 511 may be moved between different positions and their top end may move within any angular range in relation to the bottom end of the anchor.
- Figure 37 illustrates an angular range of about 30 degrees (between vertical position to 60 degrees) - but any angular edge may be provided.
- Anchors 510 may include a single joint or part or may include multiple parts.
- Anchor 510 may include multiple joints that may be move in relation to each other.
- the anchor may be a telescopic rod.
- the cable50 may be attached to or may be threadedthrough anchor 510 by any mean- by a ring, by a fastening element, the cable may pass through one or more apertures of anchor, and the like.
- Figure 37 also illustrates pool cleaning robot 20 as including wheels 13 and 14 - although any interfacing element may be used with or without tracks that can be observed in Figure 37 .
- Figure 37 further shows third interfacing elements such as set of rolling rods 530 that cover a central area of the bottom of the pool cleaning robot 20.
- the rods may be static or may rotate about their axis.
- Figure 37 illustrates nine rods although any number of rods may be provided.
- the rods may differ from each other or may be equal to each other.
- the rods may be small enough such as not to contact external surface 40 when pool cleaning robot 20 moves along the external surface 40.
- Figure 38 illustrates a pool cleaning robot 20 and a filter cleaning unit 610 of the docking station according to an example.
- Pool cleaning robot 20 is illustrated as including filtering unit 618 and opening 612. During a filter cleaning process, a part of a cleaning unit 610 (such as a pop-up sprinkler620) may enter through the opening 612 into the filtering unit 618.
- a cleaning unit 610 such as a pop-up sprinkler620
- the pop-up sprinkler 620 may have a cross section that is smaller than the opening 612 thereby the pop-up sprinkler may, even when passing through the opening 612, may not seal the opening 612 and may leave a space for fluid and/or debris to exit the pool cleaning robot through the opening 612 during the cleaning process.
- the cross section of the pop-up sprinkler and/or the opening may have any shape and/or size.
- the cross section of the pop-up sprinkler may have the same shape or may differ from each other by shape.
- the pop-up sprinkler 620 may include a valve 613.
- the valve 613 may be a ball valve that creates intermittent water jet spray thrusts to improve and create powerful streams of internal nozzle spraying to remove stubborn dirt or debris attached. Multiple nozzles or openings may be employed with varying nozzle diameter apertures along the pop up sprinkler rod. This is especially important in initial cleaning cycles when season starts and the dirt from the previous bathing season clings hard onto the filter surfaces.
- the additional liquid container containing cleaning fluid such as, for examplean anti-calc substance may be used to mix this said liquid with the spraying water (see rectangular box on the left of "612")
- the pop-up sprinkler 620 may be rotated about an axis or not.
- the pop-up sprinkler 620 may be made of a rigid material or of a softer material such as soft rubber that will inflate into the interior space of the filter or as stated above, expand/contract telescopically.
- the process will be preferably mechanical but may be subject to an electrical/electronic control.
- the pop-up sprinkler 620 is merely a non-limiting example of a cleaning element.
- Other cleaning elements may include, for example, elastic and/or non-elastic cleaning elements, cleaning elements that include a hollow tube or a hollow bag with a fluid inlet and a fluid outlet, pop-up cleaning elements that are not rods, telescopic cleaning elements, cleaning elements that do not pop-up, and the like.
- the operation of the pop-up sprinkler is as follows: as the filter becomes clogged during normal cycle time in-pool operation while the pool cleaning robot is submerged, the pool cleaner records the level of clogging and will classify it to anything between severely clogged to containing some minor dirt. This will becommunicated to the controller of the docking station to determine a cleaning process that may fit the state of the filtering unit.
- the sensing of the state of the filtering unit may be sensed by monitoring the power consumed by the pump motor (cleaner filtering unit results in lower power consumption), the rotational speed of the impeller (a cleaner filtering unit results in faster revolutions of the impeller), by a pressure sensor (a cleaner filtering unit results in lower pressure levels within the pool cleaning robot),inspecting the filtering unit with a sensor, and the like.
- the said sensing may be performed externally to the pool while, for example, in the docking station by means of an image sensor for imaging the filtering unit.
- the pool cleaning robot 20 may communicate (directly or indirectly) with any one of the docking stations 100 that have any cleaning element (even those that do not includes pop-up sprinkler 620) so that the docking station 100 will determine (select and/or calculate) a cleaning process and then apply a cleaning process that is fitted to state of the pool cleaning robot 20 - especially to the cleanliness of the filtering unit.
- the determining of the cleaning process may be performed by another device (such as external controller or any computerized system) and/or by the pool cleaning robot 20 itself.
- the determining of the cleaning process may include determining one or more cleaning parameters such as a duration of the cleaning process, durations of different phases in the cleaning process (for example duration of fluid pulses), the composition of a cleaning fluid (more or less anti-calc materials, more or less PH, and the like), which cleaning elements to use (for example using a brush or not, the number of cleaning elements to be used, and the like.
- a duration of the cleaning process durations of different phases in the cleaning process (for example duration of fluid pulses), the composition of a cleaning fluid (more or less anti-calc materials, more or less PH, and the like), which cleaning elements to use (for example using a brush or not, the number of cleaning elements to be used, and the like.
- Figure 45 illustrates pool cleaning robot 20 and a cleaning element such as an apertured bag 640 according to an example.
- the flow of water 691 and/or cleaning fluid through the aperture bag 640 may erect the aperture bag and cause jets of the water and/or cleaning fluid 691 to exit the aperture bag through apertures and clean the interior of filtering unit 618.
- nozzles or openings may be employed with varying nozzle or apertures diameters along theapertured bag.
- Debris and/or used water and/or cleaning fluid may exit the pool cleaning robot via opening 612 (see arrow 692).
- Figure 45 also shows wheels 13 and 14 of the pool cleaning robot and a valve 614 of the pool cleaning robot that is at an open position.
- Figure 46A illustrates pool cleaning robot 20, a cleaning element such as an aperture bag 640 and an additional cleaning element such as brush 650 according to an example.
- the brush 650 can assist the cleaning of the filtering unit 618 by contacting the filtering unit 618 or by being positioned at the proximity to the filtering unit 618 thereby contacting (and thus removing) debris stuck in the filtering unit 618.
- the brush 650 may be elevated and/or rotated by manipulator 652.
- Debris and/or used water and/or cleaning fluid may exit the pool cleaning robot via opening 612 (see arrow 692).
- Figure 46A also shows wheels 13 and 14 of the pool cleaning robot and a valve 614 of the pool cleaning robot that is at an open position.
- FIG. 46B illustrates a pool cleaning robot 20, a cleaning element 610 and sensor 657 according to an example
- the sensor 657 does not belong to the pool cleaning robot and may belong to the docking station 100.
- the sensor 657 may sense the cleanliness of the filtering unit (for example by imaging parts of the filtering unit) and send information to a controller (such as controller 102) for determining parameters of the cleaning process.
- Sensor 657 may be moved within the filtering unit by manipulator 658.
- a second filter (not shown) with a second opening inlet
- a second or morecleaning unit 610 such as a pop-up sprinkler 620 or aperture bags 640
- forcing the water to exit the pool cleaning robot during an exit process from the pool may speed up the exit process and may reduce a load imposed, during the exit process, on the pool cleaning robot and/or a docking station that may participate in the exit process.
- the load may be reduced by allowing the pool cleaning robot to depart from the sidewall of the pool.Instead of trying to rotate the pool cleaning robot from a vertical position (when climbing a vertical sidewall of the pool) the pool cleaning robot is allowed to depart from the sidewall of the pool and start the exit process while being non-vertical. This reduces the force that is required to apply when the pool cleaning robot exits the pool.
- an impeller of the pool cleaning robot is rotated at a first direction thereby causing the water to enter through a first opening, (optionally pass through a unidirectional valve), pass through the filtering unit (to be cleaned) and then exit through a second opening.
- the pool cleaning robot may force the water (inside the pool cleaning robot) to exit the pool cleaning robot by reversing the direction of rotation of the impeller. Accordingly, the impeller will be rotated at a second direction (opposite or counter to the first direction).
- Rotating the impeller at the second direction may cause the water within the pool cleaning robot to exit through the first opening - in case where the water can exit from the first opening. For example - when there is no unidirectional valve that prevents the passage of the water from the filtering unit to the first opening.
- Rotating the impeller at the first direction may cause the water to exit through one or more other openings such as a third opening and/or a fourth opening and the like.
- the water may exit the pool cleaning robot as a water jet or in any other manner.
- Figures 29 and 30 illustrate jets of water 501 that exit from the pool cleaning robot from one or more openings (not shown).
- openings through which jets of water may exit are illustrated in US patent application serial number 2014/0230168 .
- Figures 32 and 33 illustrate a rear door 27 that once opened allows the water to exit the pool cleaning robot through the rear door.
- the openings may be formed in any part of the pool cleaning robot, may be of any shape and/or size.
- an opening through which water may exit may be positioned at the bottom of the housing, at the top of the housing and/or at any sidewall of the housing.
- Any opening through which the water may exit may be continuously opened, may be opened only under certain circumstances (for example opened when the pool cleaning robot is at least partially outside the water, when the pool cleaning robot is at certain angle in relation to the horizon, and the like), may be closed while the pool cleaning robot is submerged and cleans the pool, and the like.
- Each opening may be covered by a cover and/or seal and/or a door for closing the opening.
- Figure 50 illustrates method 5000 that may include step 5010 of moving the pool cleaning robot at a path that leads outside the pool, and step 5020 of forcing, during at least a part of the moving of the pool cleaning robot, water to exit the pool cleaning robot by rotating an impeller of the pool cleaning robot.
- Step 5010 may include climbing, by the pool cleaning robot, on a sidewall of a pool while rotating the impeller at a first direction; wherein the climbing is followed by stopping, by the pool cleaning robot, the climbing on the sidewall of the pool and disengaging from the sidewall of the pool.
- the illustrated examples may be implemented as circuitry located on a single integrated circuit or within a same device.
- the examples may be implemented as any number of separate integrated circuits or separate devices interconnected with each other in a suitable manner.
- the examples, or portions thereof may implemented as soft or code representations of physical circuitry or of logical representations convertible into physical circuitry, such as in a hardware description language of any appropriate type.
- the invention is not limited to physical devices or units implemented in non-programmable hardware but can also be applied in programmable devices or units able to perform the desired device functions by operating in accordance with suitable program code, such as mainframes, minicomputers, servers, workstations, personal computers, notepads, personal digital assistants, electronic games, automotive and other embedded systems, cell phones and various other wireless devices, commonly denoted in this application as 'computer systems'.
- suitable program code such as mainframes, minicomputers, servers, workstations, personal computers, notepads, personal digital assistants, electronic games, automotive and other embedded systems, cell phones and various other wireless devices, commonly denoted in this application as 'computer systems'.
- any reference signs placed between parentheses shall not be construed as limiting the claim.
- the word 'comprising' does not exclude the presence of other elements or steps then those listed in a claim.
- the terms "a” or “an,” as used herein, are defined as one as or more than one.
- the use of introductory phrases such as “at least one " and “one or more " in the claims should not be construed to imply that the introduction of another claim element by the indefinite articles "a " or “an " limits any particular claim containing such introduced claim element to inventions containing only one such element, even when the same claim includes the introductory phrases “one or more " or “at least one " and indefinite articles such as "a " or “an.
- Any system, apparatus or device referred to this patent application includes at least one hardware component.
Landscapes
- Engineering & Computer Science (AREA)
- Architecture (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Electric Vacuum Cleaner (AREA)
- Manipulator (AREA)
Description
- This application claims priority from
US patent , fromapplication serial number 15/089,606 filing date April 4 2016US patent application serial number 15/231200 filing date August 8 2016US patent application serial number 15/231396 filing date August 8 2016US patent application serial number 15/231431 filing date August 8 2016 - There is a growing need to reduce the human intervention in cleaning pools. It is well known that pool cleaning robotusually need to be immerged or retrieved manually from or into a swimming pool. Retrieval may be performed by grabbing and pulling the electrical cable followed by grabbing and pulling of a handle or retrieving by means of a special pike with a hook. Immersion can be performed by grabbing and lifting the cleaner by its handle and immersing it manually into the water. These are time consuming operations, difficult at times. The intention of this invention is to specifically facilitate the retrieval of the pool cleaning robot making it an automatic function. It may also generally intend to improve on the basic rule which govern the method of pool cleaning robot handling by introducing an almost fully automatic and autonomous pool cleaning robot which seldom needs any manual intervention. Document
US2014/0263087 A1 discloses a pool cleaning robot and a docking station which can automatically clean the debris container of the robot. - There may be provided a system for cleaning a pool cleaning robot, the system may include a controller, a communication system and a cleaning unit; wherein the communication system may be configured to receive information about a cleanliness of a filtering unit of the pool cleaning robot; wherein the controller may be configured to determine, based on the cleanliness of the filtering unit, a cleaning process to be applied on the pool cleaning process by the system; and wherein the cleaning unit may be configured to apply the cleaning process on the pool cleaning unit.
- The controller may be configured to determine at least one parameter out of (a) a duration of the cleaning process, (b) a duration of one or more phases of the cleaning process, (c) a cleaning material to be used during the cleaning process, and (d) one or more cleaning materials to be used during one or more phases of the cleaning process.
- The cleaning unit may include a cleaning element that may be configured, once positioned within a space surrounded by the filtering unit of the pool cleaning robot, to direct fluid towards an interior of the filtering unit.
- The cleaning element may be anozzled pop-up water jets thrusting sprinkler.
- The cleaning element water jets thrusting power may be augmented using a valve.
- The cleaning element may be an apertured bag.
- The cleaning unit may include a cleaning element manipulator for determining a spatial relationship between the cleaning element and the filtering unit.
- The cleaning element may be rigid.
- The cleaning element may be elastic.
- The cleaning unit may include an additional cleaning element for contacting the interior of the filtering unit during the cleaning process.
- The cleaning unit may include an additional cleaning element for contacting, during the cleaning process, debris that extend from the interior of the filtering unit without contacting the filtering unit.
- The cleaning element, once inserted through a first opening of the pool cleaning robot into a space surrounded by the filtering unit of the pool cleaning robot, blocks only a part of the first opening.
- The system may include a sensor that may be configured to sense a cleanliness of a filtering unit of the pool cleaning robot, once positioned within a space surrounded by the filtering unit of the pool cleaning robot.
- The subject matter regarded as the invention is particularly pointed out and distinctly claimed in the concluding portion of the specification. The invention, however, both as to organization and method of operation, together with objects, features, and advantages thereof, may best be understood by reference to the following detailed description when read with the accompanying drawings in which
-
FIG. 1 illustrates a pool cleaning robot that climbs on a sidewall of the pool while propagating towards a docking station and a cable that connects the pool cleaning robot to a docking station is loose according to an example; -
FIG. 2 illustrates a pool cleaning robot that is proximate to an edge of the pool and a cable that connects a handle of the pool cleaning robot to a docking station is tense and the handle is in a closed position according to an example; -
FIG. 3 illustrates a pool cleaning robot that is proximate to an edge of the pool and the cable that connects the handle of the pool cleaning robot to a docking station is tense and the handle is in an open position according to an example; -
FIG. 4 illustrates a pool cleaning robot is partly outside the water of the pool in an intermediate position in which water can be drained from the pool cleaning robot according to an example; -
FIG. 5 illustrates a pool cleaning robot is completely outside the water of the pool and propagates towards the docking station according to an example; -
FIG. 6 illustrates a pool cleaning robot is docked at the docking station according to an example; -
FIG. 7 illustrates a pool cleaning robot that climbs on a sidewall of the pool while propagating towards a docking station and the cable that connects the pool cleaning robot to a docking station is loose according to an example; -
FIG. 8 illustrates a pool cleaning robot that is still underwater but is proximate to an edge of the pool and the cable that connects the handle of the pool cleaning robot to a docking station and the handle is partially opened - in an intermediate position according to an example; -
FIG. 9 illustrates a pool cleaning robot that is partially above the water of the pool, still in a vertical position and proximate to an edge of the pool, wherein the cable that connects the handle of the pool cleaning robot to a docking station is tense and the handle is in an open position according to an example; -
FIG. 10 illustrates a pool cleaning robot is partly outside the water of the pool in an intermediate positon in which water can be drained from the pool cleaning robot, wherein a second interfacing element contacts the edge of the pool according to an example; -
FIG. 11 illustrates a pool cleaning robot is completely outside the water of the pool but is closer to the edge of the pool than to the docking station according to an example; -
FIG. 12 illustrates a pool cleaning robot is docked at the docking station according to an example; -
FIG. 13 illustrates a pool cleaning robot that climbs on a sidewall of the pool while propagating towards a docking station and the cable that connects the pool cleaning robot to a docking station is loose according to an example; -
FIG. 14 illustrates a pool cleaning robot that is slightly above the water and is proximate to an edge of the pool and the cable that connects the handle of the pool cleaning robot to a docking station and the handle is partially opened - in an intermediate position according to an example; -
FIG. 15 illustrates a pool cleaning robot that is partially above the water of the pool, still in a vertical position and proximate to an edge of the pool, wherein the cable that connects the handle of the pool cleaning robot to a docking station is tense and the handle is in an open position according to an example; -
FIG. 16 illustrates a pool cleaning robot is partly outside the water of the pool in an intermediate positon in which water can be drained from the pool cleaning robot, wherein a second interfacing element contacts the edge of the pool according to an example; -
FIG. 17 illustrates a pool cleaning robot is completely outside the water of the pool but is closer to the edge of the pool than to the docking station according to an example; -
FIG. 18 illustrates a pool cleaning robot is docked at the docking station according to an example; -
FIG. 19 illustrates a pool cleaning robot according to an example; -
FIG. 20 illustrates a pool cleaning robot according to an example; -
FIG. 21 illustrates a pool cleaning robot according to an example; -
FIG. 22 illustrates a pool cleaning robot according to an example; -
FIG. 23 illustrates a pool cleaning robot according to an example; -
FIG. 24 illustrates a docking station and a pool cleaning robot according to an example; -
FIG. 25 illustrates a pool cleaning robot according to an example; -
FIG. 26 illustrates a handle of a pool cleaning robot according to an example; and -
FIG. 27 illustrates a method according to an example; -
FIGs. 28 and50 illustrate methods according to an example; -
FIG. 29 illustrates a pool cleaning robot that is floatingand is spaced apart from the sidewall of the pool, wherein the cable that connects the handle of the pool cleaning robot to a docking station is not tense and the handle is in a closed position according to an example; -
FIG. 30 illustrates a pool cleaning robot that is floating and is spaced apart from the sidewall of the pool, wherein the cable that connects an anchor to a docking station is not tense according to an example; -
FIG. 31 illustrates a pool cleaning robot that is floating and is proximate to the sidewall of the pool, wherein the cable that connects an anchor to a docking station is tense according to an example; -
FIG. 32 illustrates a pool cleaning robot that is partly outside the water of the pool and is positioned in a first intermediate positon in which water can be drained from the pool cleaning robot, wherein a front area of the bottom of the pool cleaning robot contacts the edge of the pool according to an example; -
FIG. 33 illustrates a pool cleaning robot that is partly outside the water of the pool and is positioned in a second intermediate positon in which water can be drained from the pool cleaning robot, wherein a second interfacing element of the pool cleaning robot contacts the edge of the pool according to an example; -
FIG. 34 illustrates a pool cleaning robot that is completely outside the water of the pool but is closer to the edge of the pool than to the docking station according to an example; -
FIG. 35 illustrates a pool cleaning robot and adocking station according to an example; -
FIG. 36 illustrates a pool cleaning robot and a docking station according to an example; -
FIG. 37 illustrates a pool cleaning robot according to an example; -
FIG. 38 illustrates a pool cleaning robot and a cleaning unit of the docking station according to an example; -
FIG. 39 illustrates water of a pool, a sidewall of a pool, an external surface of the pool, space, docking station, pool cleaning robot and cover according to an example; -
FIGs. 40A and 40B illustrate water of a pool, a sidewall of a pool, an external surface of the pool, space, docking station, pool cleaning robot and cover according to an example; -
FIGs. 41A and 41B illustrate water of a pool, a sidewall of a pool, an external surface of the pool, space, docking station, pool cleaning robot and cover according to at leastone embodiment of the invention; -
FIGs.42A and 42B , illustrate a space and supporting elements according to various embodiment of the invention; -
FIGs. 43A, 43B, 43B and 43D illustrate various covers according to various embodiment of the invention; -
FIGs. 44A and 44B illustrate water of a pool, a sidewall of a pool, an external surface of the pool, space, docking station, pool cleaning robot and cover according to an example; -
FIG. 45 illustrates a pool cleaning robot and a cleaning element according to an example; -
FIG. 46A illustrates a pool cleaning robot, a cleaning element and an additional cleaning element according to an example; -
FIG. 46B illustrates a pool cleaning robot, a cleaning element and sensor according to an example; -
FIGs 47A- 47B illustrate a pool cleaning robot according to various embodiment of the invention; -
FIGs 48A- 48C illustrate a pool cleaning robot according to various embodiment of the invention; -
FIG. 49 illustrates water of a pool, a sidewall of a pool, an external surface of the pool, space, docking station, pool cleaning robot and cover according to an example. - In the following description specific details are set forth in order to provide a thorough understanding of various examples of pool cleaning robots .
- In the following detailed description, numerous specific details are set forth in order to provide a thorough understanding of various examples of pool cleaning robots. However, it will be understood by those skilled in the art that the present invention may be practiced without these specific details. In other instances, well-known methods, procedures, and components have not been described in detail.
- It will be appreciated that for simplicity and clarity of illustration, elements shown in the figures have not necessarily been drawn to scale. For example, the dimensions of some of the elements may be exaggerated relative to other elements for clarity. Further, where considered appropriate, reference numerals may be repeated among the figures to indicate corresponding or analogous elements.
- Any reference in the specification to a system should be applied mutatis mutandis to a method that can be executed by the system.
- Any reference in the specification to a method should be applied mutatis mutandis to a system capable of executing the method.
- According to an example there may be provided a pool cleaning robot for cleaning a pool, the pool cleaning robot may include a housing; a first interfacing element may be configured to interface between the pool cleaning robot and a bottom of a pool while the pool cleaning robot cleans the bottom of the pool; and one or more second interfacing elements that may be configured to reduce a friction between the pool and the pool cleaning robot during at least a portion of an exit process in which the pool cleaning robot exits the pool.
- The one or more second interfacing elements may include at least one radially symmetrical rotating element.
- A given second interface of the one or more second interfacing elements may be configured not to contact the bottom of the pool when the pool cleaning robot cleans the bottom of the pool.
- The one or more second interfacing elements may include at least one radially symmetrical rotating element.
- The one or more second interfacing elements may include a radially symmetrical rotating element that may be coupled to an intermediate element, wherein the intermediate element may be configured to move between a first position to a second position thereby changing a spatial relationship between the housing and the radially symmetrical rotating element. The movement of the intermediate element can include a movement to any intermediate position between the first and second positions.
- The pool cleaning robot may include an interface manipulator that may be configured to move the intermediate element between the first position to the second position.
- The intermediate element may be rotatably coupled to the housing.
- The intermediate element may be rotatably coupled to the housing by a handle that has an axis of rotation that virtually intersects with a front upper part of the housing.
- The radially symmetrical rotating element may be configured to protrude from the intermediate element during the portion of the exit process.
- The pool cleaning robot according to claim wherein the radially symmetrical rotating element may be configured not to protrude from the intermediate element when the pool cleaning robot cleans the pool.
- The pool cleaning robot may include a sensor and a controller; wherein the controller may be configured to trigger a movement of the intermediate element between the first position and the second position based on signals sent from the sensor.
- The sensor may be a height sensor.
- The sensor may be an out of water sensor that may be configured to sense that at least a portion of the pool cleaning robot exits a water of the pool.
- The pool cleaning robot may include a controller; wherein the controller may be configured to trigger a movement of the intermediate element between the first position and the second position based on signals sent from an external system that may include an external sensor that may be configured to assist in an extraction of the pool cleaning robot from the pool.
- An intermediate element may be mechanically coupled to an external system that may be configured to assist in an extraction of the pool cleaning robot from the pool; wherein the pool cleaning robot may be configured to perform the movement of the intermediate element between the first position and the second position based on a command from the system.
- An intermediate element may be mechanically coupled to the external system via a cable; and wherein the movement of the intermediate element between the first position and the second position may be responsive to a tension of the cable.
- The pool cleaning robot may include a motor that may be configured to assist in propelling the pool cleaning robot during the exit process.
- The pool cleaning robot may include a winch (see for
example winch 999 offigure 49 ) that may be configured to propel the pool cleaning robot during the exit process. - The pool cleaning robot may include at least one aperture for draining fluid from the pool cleaning robot during the exit process; and a controller that may be configured to affect a timing of at least one phase of the exit process based upon an estimated or an actual amount of the fluid within the pool cleaning robot.
- The pool cleaning robot may include at least one aperture for draining fluid from the pool cleaning robot during the exit process; and a controller that may be configured to affect a timing of at least one phase of the exit process based upon an aggregate weight of the pool cleaning robot and the fluid within the pool cleaning robot.
- The pool cleaning robot may include a controller that may be configured to prevent a center of the pool cleaning robot from passing an edge of the pool before an amount of fluid that resides in the pool cleaning robot may be below a predefined threshold.
- The one or more second interfacing elements may be configured to reduce a friction between an edge of the pool and the pool cleaning robot during the portion of the exit process.
- At least one of the one or more second interfacing elements may be coupled to a bottom of the housing.
- The pool cleaning robot may include a drive system that may include a main portion and an auxiliary portion; wherein the auxiliary portion may be arranged to move the pool cleaning robot during the portion of the exit process; and wherein the main portion may be arranged to move the pool cleaning robot when the robot cleans the pool.
- According to an example there may be provided a pool cleaning robot for cleaning a pool, the pool cleaning robot may include a housing; a first interfacing element may be configured to interface between the pool cleaning robot and a bottom of a pool while the pool cleaning robot cleans the bottom of the pool; and an movable handle that may be configured to be coupled, at an anchor area, to an external system interface; wherein the movable handle may be configured to elevate the anchor area during a portion of an exit process in which the pool cleaning robot, with an assistance of the external system, exits the pool; wherein the external system may be positioned outside the pool.
- The pool cleaning robot may include one or more second interfacing elements that may be configured to reduce a friction between the pool and the pool cleaning robot during at least a portion of the exit process.
- The pool cleaning robot may include an interface manipulator that may be configured to move the intermediate element between a first position to the second position thereby changing the distance between the housing and the external system.
- According to an example there may be provided a pool cleaning robot for cleaning a pool, the pool cleaning robot may include a housing; a first interfacing element may be configured to interface between the pool cleaning robot and a bottom of a pool while the pool cleaning robot cleans the bottom of the pool; and a second interfacing element that may be configured to interface between the pool cleaning robot and an exterior surface during a portion of an exit process in which the pool cleaning robot exits the pool; and wherein the second interfacing element may be configured not to contact the bottom of the pool when the pool cleaning robot cleans the bottom of the pool.
- There according to an examplemay be provided a pool cleaning robot for cleaning a pool, the pool cleaning robot may include a housing; a first interfacing element may be configured to interface between the pool cleaning robot and a bottom of a pool while the pool cleaning robot cleans the bottom of the pool; one or more second interfacing elements that may be configured to contact an edge of the pool during an exit process during which the pool cleaning robot exits the pool; and an interface manipulator that may be configured to change a spatial relationship between the housing and the one or more second interfacing elements thereby preventing a given second interfacing element of one or more second interfacing elements to contact the bottom of the pool while the pool cleaning robot cleans the bottom of the pool.
- There according to an examplemay be provided a pool cleaning robot for cleaning a pool, the pool cleaning robot may include a housing; a first interfacing element may be configured to interface between the pool cleaning robot and a bottom of a pool while the pool cleaning robot cleans the bottom of the pool; one or more second interfacing elements that differ from the first interfacing element and may be configured to contact an edge of the pool during an exit process during which the pool cleaning robot exits the pool; at least one aperture for draining fluid from the pool cleaning robot during the exit process; anda controller that may be configured to control a timing of at least one portion of the exit process in response to actual or estimated amount of fluid within the pool cleaning robot.
- According to an example there may be provided a system for extraction of a pool cleaning robot from a pool, the system may include a cable that may be arranged to be coupled to a pool cleaning robot during an exit process during which the pool cleaning robot may be extracted from the pool; a cable manipulator for pulling the cable during the exit process; and a controller that may be configured to control the pulling of the cable based on an estimated or an actual amount of the fluid within the pool cleaning robot.
- According to an example there may be provided a method for extracting a pool cleaning robot from a pool, the method may include pulling a cable that may be coupled to the pool cleaning robot during an exit process during which the pool cleaning robot exits the pool; and controlling, by a controller of a system, the cable based on an estimated or an actual amount of the fluid within the pool cleaning robot.
- The system may be positioned at a predefined distance from an edge of the pool.
- The pulling may be executed by a motor and a reel; and wherein a part of the reel may be positioned below the edge of the pool.
- There may be provided a pool cleaning robot that may be mechanically coupled to an extraction element that is used to extract the pool cleaning robot from the pool. The extraction element may be a cable and the following text refers to a cable. It should be noted that the cable is merely a non-limiting example of an extraction element.
- There may be provided a pool cleaning robot for cleaning a pool, the pool cleaning system may include a housing; and a drive system, wheels and/or tracks, cleaning brushes, a pump system, a filtering system, a tethered electrical cable and an electronic control system that may be arranged to move the pool cleaning robot in relation to an environment of the pool cleaning robot.
- The electronic control may receive inputs from sensors and/or accelerometer that govern the performance and environment of the pool cleaning robot.
- According to an example there may be further provided a pool cleaning system that comprises a pool cleaning robot in conjunction of a separatecable-reel/winch that is external to the pool and that may be able to autonomously exit the pool cleaning robot from the pool.
- The pool cleaning robot may be coupled to a docking station (also referred to as system or external system) that is located outside the pool) by a cable such as but not limited to an electrical cable that is tethered to the pool cleaning robot on its first end and to a cable reel/ winch on its second end. Alternatively - the electrical cable may be provided in additional to a cable that is mechanically coupled to the system.
- The docking station is an example of a maintenance system that may perform any type of maintenance operation. Non-limiting examples of maintenance operations include cleaning the pool cleaning robot, receiving debris from the pool cleaning robot, shredding debris outputted from the pool cleaning robot, replacing a filter of the pool cleaning robot, loading a filter to the pool cleaning robot, electrically charging the pool cleaning robot, repairing and/or replacing any part of the pool cleaning robot. Additionally or alternatively, the docking station is configured to receive and/or provide information and/or commands and/or to and/or from the pool cleaning robot. During one or more the maintenance operation the pool cleaning robot may be docked in the docking station or otherwise may be accessible to the maintenance operation. For example, when washing the pool cleaning robot, the pool cleaning robot should be close enough to the docking station in order to be washed by fluid extracted from the docking station.
- The tethered cable or the tethered electrical cable may include reinforcing fiber strands that may comprise aramid strands. The cable may be further reinforced internally with additional aramid strands or other carbon type strands in order to withstand the extended stresses on the cable that may cause tearing.
- The pool cleaning system may include the said pool cable-reel/winch that is able to interact both mechanically and electronically with the pool cleaning robot.
- The process of exiting from the pool may direct the pool cleaning robot onto a docking station that may comprise the cable-reel/winch and a power supply and a cable reel/winch drive motor and a control box able to govern the cablereel/winch and communicate with the pool cleaning robot control box by wire or wireless means.
- A manual override handle or other man machine interface (not shown) may be used to manually reel-in and pull out the pool cleaning robot from the pool.
- In another embodiment, the cable reel/winch is an independent system that is not located on a docking station and may comprise the reel, a drive motor, electrical supply and power supply with said independent system is bolted or attached to the ground or another immovable anchoring element so that, for safety reasons, it may not detach and reach the pool water.
- An immovable anchoring element may for example be the wall of a house or a concrete, metal or wooden pole of any solid built construction in the vicinity of the swimming pool.
- A number of pool cleaning robot services may be provided whilst the pool cleaning robot is positioned on a docking station. Amongst these services are automatic filter replacement and filter clean up as discussed and in
US provisional patent application 61/745,556 filing date 22nd December 2012 PCT/IL2013/051055 filing date 22nd of December 2013 andUS provisional patent 61/992,247 - In an alternative option to a docking station/caddy, the said pool cleaning robot will autonomously exit the pool and park in the vicinity of the pool edge and may await end user intervention or another pool cleaning cycle.
- In any of above at least one embodiment of exiting the pool, the reverse operation of returning the pool cleaning robot to the pool may be also performed. Namely, the pool cleaning robot will travel from vicinity of pool edge or from the docking station/caddy whilst cable reel/winch releases sufficient slack to tethered cable to reach pool edge. As soon as the cleaner attempts to drop into the pool water the reel/will hold back any further slack to allow the handle to unfold and extend to an upward position thereby allowing smooth and slow descent into the water.
- The handle therefore performsa dual purpose by being a carrying handle for the end user but that may also serve as an intermediate element that is used toattach the pool cleaning robot to a docking station by means of the electrical power cord.
- The pool cleaning robot depicted in
figures 1-18 usually travel on the pool floor or climb the pool walls in order to sweep, brush and suck in dirt and debris that are accumulated on the said surfaces and wall. - In
figures 1-4 the pool cleaning robot is denoted 20, the intermediate element is a handle that is denoted 12, an axis of rotation of the handle is denoted 25, a second interfacing element (such as wheel) is denoted 22. The cable that is connected between the pool cleaning robot and the docking station (also referred to system or external system) 100 is denoted 50, the reel of the docking station is denoted 60, a motor/winch of the docking station is denoted 90. - In
figure 7 the pool cleaning robot is illustrated as including acontroller 29,sensor 11 and anaperture 28 for draining fluid. The pool cleaning robot may have more than a single sensor, more than a single aperture and the positions of the aperture, controller and sensor may differ from those illustrated infigure 1 . For example, thesensor 11 may be floating in the fluid within the pool cleaning robot and his location is indicative of the amount of fluid in the pool cleaning robot. Thesensor 11 may track after a floating element that floats in the fluid within the pool cleaning robot and the location of the floating element is indicative of the amount of fluid in the pool cleaning robot. The sensor may be an optical sensor, a pressure sensor that tracks the fluid within the pool cleaning sensor. There may be provided an orientation sensor and a timer for monitoring the exit process. The duration of the pool cleaning robot at each orientation during the exit process may provide an estimate of the amount of fluid within the pool cleaning robot. - It is noted that the pool cleaning robot may include the controller and not the sensor or the sensor and not the controller.
- It should be noted that the depiction of the distances of the
docking stations 100 from the pool's edge infigures 1-18 and24 are purely illustrative. Distances and other relevant parameters may vary according to national electrical regulations prevailing in each country or county where said station may be installed. - In
figures 1-12 the docking station is positioned above theexternal surface 40 and includes aframe 70,wheels 80,lower surface 110 on which thepool cleaning robot 20 can climb and be positioned above.Thedocking station 10 also includes a controller (denoted 102 infigure 7 ) for controlling the exit process. - In
figures 13-18 thedocking system 100 is located within aspace 200 formed in theexternal surface 40 that may be a pool deck, thespace 200 may include a sealedcover 202 with a hole and be equipped with cable guiding idler rollers (not shown) in which cable can pass through. The bottom of the docking station is located below theedge 35 of the pool and may include a subterranean electrical junction box, a water drain and the like.Docking system 100 may include a controller and/or a sensor - but they are not shown for brevity of explanation. - The pool includes
water 10 and asidewall 30 that interfaces with an external surface 40.Themotor 90 may be positioned inside the reel (As shown infigure 1 ), outside the rail and be fed by electricity from a mains power outlet, may belong to the robot, the docking station or belong to a third element. Both pool cleaning robot and the docking station may include motors. The docking station may be static, may move along the external surface and the like. - The pool (or external surface) may include or may be connected to stoppers that may prevent the docking station to enter the pool or move beyond the stoppers. For example,
line 101 offigure 1 may represent a stopper and element 103offigure 7 may represent a fastening element that fastens the docking station to the external surface in any conceivable method. - It is noted that the exit process of the pool cleaning robot from the pool can be done by using the drive power of the pool cleaning robot and/or the reel of the docking station.For example- any phase of the exit process of
figures 2-7 may be executed by using the reel and/or the pool cleaning robot. - It is noted, referring to
figures2-3 that the movement of thehandle 12 from a closed position to an open position can be triggered by the tension of the cable but may be triggered by sensors such as height sensors, out of water sensor and the like.The sensor may besensor 11 of the pool cleaning robot and/orsensor 92 of thedocking station 100. - During the exit process, and as especially illustrated in
figures 3 ,10 and16 , the friction between the pool cleaning robot and the edge of the pool is decreased by having second interfacing elements such as wheels or guide wheels orauxiliary wheels - The first interfacing elements are wheels (denoted 13 and 14 in
figure 7 ) and/or tracksor any other interfacing elements that interface with the pool during the cleaning process. - An automatic, self-propelledpool cleaning robot may be governed by a controller (that may be positioned in a water proof box) in which a pre-set software or a manually overridden software set controls, amongst other, its cycle time. At the end of a cleaning cycle time, the pool cleaning robot stops its operation waiting for the end user to pull it out for service or for storage.
- The reeling-in starts at a stage where the pool cleaning robot needs to exit the pool. The need may arise due to end of cycle, end of another pre-set period of time or reason such as a full filter bag that needs to be cleaned up or another service event.
- According to an example as soon as a pre-set time event or any service event may occur, the cleaning program will end and the pool cleaning robot initiates aspecific pool exit program protocol, a wired or wireless message is relayed to the cable reel/winch - wherever it may be positioned or located - so that the reeling-out or extraction process may start.
- The first stage will be to have the pool cleaning robot positioned near the wall in the vicinity where the cable reel/winch is located.
- The pool cleaning robot may actively assist with the floor travelling and extraction process by means of its drive motors.
- The pool cleaning robot may actively assist with the wall travelling and extraction process by means of its pump and drive motors.
- The pool cleaning robot emits wired or wireless communications to the reel/winch constantly sending data regarding its position, bearing and speed of travel
-
Figures 1-18 depict the pool cleaning robot as it is beingreeled or pulled out (using a cable) while alsoassisting with the pool climbing to reach the waterline level. - The cable may be tethered to the pool cleaning robot via its handle. Other at least one embodiment may be possible.
- During the pool exit and/or pool reentry phases, the pulling pressure exerted on the cableand handle may unfold and extend or retractthe handle to a forward and/or upward or outward position whereby the distance between the cable and the pool cleaning robot housing is extended in order toincrease the hoist span angle to be as wide as possible to enablesmooth exiting and traversing of the sharp corner between the wall and the external environment of the pool.
- The foldable/
retractable handle 12 movement around the axis ofrotation 25 of the handle, may be governed by a spring mechanism for deploying and folding the said handle that may be automatic (not shown). The handle of the pool cleaning robot will normally be in a folded or a "closed" position whereby the handle arms are fitted and/or locked into dedicated slots on the surface or within thehousing of the pool cleaning robot in a way that does not interfere with normal cleaner operation (not shown).During the exiting phasesfrom the pool, the handle will detach or release from the said slots and deploy to a retracted position or an "open" position. - Such a lock and release mechanism may be spring activated. Springs that force a movable element to be in a certain position are known in the art (for example - a spring arrangement of a mouse trap). Thus, when the force and/or torque applied on the handle exceeds a predefined threshold the spring (or any other restraining element) is overcome and the handle moved to an open position.
- The handle may be configured to move upwards and downwards - instead of rotatably moving. This is illustrated in
figures 19-22 . Thehandle 15 may be extended upwards (in relation to the bottom of the housing). This handle may include telescopic bars and/or telescopic subsections or any other mechanism for elevating or lowering an anchor area - which is the area that is connected to thecable 50. The telescopic handle sections or sub sections may emerge or reenter from or to slots in the housing by means of springs, or other spring like mechanisms, from built-in pipes or tubeslocated within the housing (not shown). - It should be noted that the telescopic handle may include second interfacing elements such as wheels 21-23 of
figure 7 and/or may have one, two or more than three interfacing elements located at the lower and front part of the telescopic handle. There may also be provided a combination ofhandles 12 and 15 - a telescopic upper part and a lower part that may be parallel to or oriented to the telescopic upper part - with one or more second interfacing wheels. - It is noted that when the pool cleaning robot has first interfacing elements that are
wheels 13 and 14 - without a track then the bottom of the pool cleaning robot may includesecond interfacing elements 16. - The pool cleaning robot electrical power cordconnects the docking station to the handle by means a sturdy mechanical attachment, the cable further winds through the internal hollow arms of the handle and eventually exits the handle to connect to the housing and supply electrical power to the pool cleaning robot motors and its control box.
- During the exit phases, at least one auxiliaryguide wheel,that is integrally attached to the handle and that may be oriented towards the pool floor or wall surfacesor outward fromthe bottom of the pool cleaning housing, may bump out to protrude and make contact with the said wall surfaces.
Figure 26 illustratespistons handle 15 that may move theguide wheels - Said guide wheel may be a set of guide wheels that will form a set of multiple auxiliary foldable and retractable guide wheels to assist with the traversing, exiting and re-entryphases and processes of the pool cleaning robot. During the handle extraction or deployment to its fullest length, the guide wheels may simultaneously and progressively exit out from their slots. And vice versa, when folding the handle back into its folded position the guide wheels may simultaneously and progressively reenter into a folded position in the slots (not shown).
- The guide wheels may have varying sizes and may be made of abrasion and chemical resistance natural or synthetic rubber such as polyurethane or silicone. Varying hardness (or softness) may be applied to different guide wheels.
- Additional wheels and / or rollers may be located at the bottom of the housing in order to reduce friction and possible damage to either the pool surfaces/covers or the pool cleaning robot itself.
- It should be noted that the pool cleaning robot may be filled with water and as soon as it reaches the waterline, water will incrementally evacuate the pool cleaning robot housingand it will become heavier as it moves out of water and gravity takes effect.
- At a certain point in the exiting phases, the guide wheel will be forced against the corner meeting of the pool wall and external surface. This is the critical event where the reeling-in will utilize maximum energy to be able to cross the corner obstacle while pulling the entire weight of the pool cleaning robot.
- After exiting, the pool cleaning robot may be further pulled to a parking spot on or near the docking station or caddy or be left to park near or by the pool side.
- During external navigation to the said parking spot, the pool cleaning robot may assist with its driving system in order to speed up and facilitate the process.
- A message may be wirelessly transmitted that the pool cleaning robot has exited the pool and is in parking position.
- Due to obstacles that the pool cleaning robot may encounter, for example: pool cleaning robot is overweight whilst speed of reeling-out is too fast. The interactive communication between the pool cleaning robot and the reel/winch may actuate to implement corrective action measures for example by reducing exit speed or improving exit angle etc.
- A torque sensor, torque transducer or a strain gage may be incorporated onto the motor/
winch 90 on the rotating reel for measuring and recording the torqueapplied during the pulling of the pool cleaning robot. Thecontroller 102 may receive and compare the data from one or more sensors (of the pool cleaning robot and/or of the docking station) with the preset thresholds for maximum and minimum torques allowed in the controlling of the exit or reentry process. - In other words, if the weight of the pool cleaning robot exceeds (for example 25 kgs) while exiting, then the controller may initiate an ON/OFF reeling mode whereby after each reeling and measuring the torque, the reeling will stop to allow for water evacuation from the vertically inclined pool cleaning robot. The stop may be replaced by slowing the speed of the exit process - slowing the rotation of the reel. The slowing may almost stop the progress of the pool cleaning robot. The control process may change the speed of rotation of the reel between more than two speeds during the exit process.
- Any major obstacle encountered (for example a guide wheel stuck) may also signal for a temporary stop with back and forth torque testing or even to a reeling full stop sending the pool cleaning robot back into the pool. A low torque may be interpreted as a pool cleaning robot travelling horizontally so the reeling may set the rotation to a dead slow pre-set speed; and, vice versa when the pool cleaning robot travels on its own wheels/tracks to exit the docking station or the parking back into the pool. The pool cleaning robot travelling may signal the winch to incrementally release cable slack. At the pool edge, the winch will sense the increase weight while descending to the pool and resume an ON/OFF reeling mode until the pool cleaning robot has reentered the pool water and signals minimum torque levels.
- The operation of returning or submerging the pool cleaning robot into the pool is performed in the reverse order whereby this will include a governing pool reentry or reintroduction program protocol at the winch/reel control box.
- The said additional wheels and / or rollers that may be located at the bottom of the housing becomeparticularlyuseful in a wheeled (non-tracked) pool cleaning robot embodiment.
- The said additional wheels may be further driven by means of the onboard pool cleaning robot drive system.
- For swimmers safety around the pool, the docking station/winch and /or pool cleaning robot may be equipped with a buzzer and flashing LED to draw attention that a reeling maneuver is underway.
-
Figure 23 illustrates thewinch 17 may be included in the pool cleaning robot. The winch of the pool cleaning robot may replace the winch of the external system.The pool cleaning robot may or may not include the handle.Cable 50 is connected between the pool cleaning robot and the external system - it may be fixed to a frame of the external system that may also include an electrical power supply pack. The winch may be controlled by thecontroller 102 of the pool cleaning robot or by the controller of the system. - The pool cleaning robot and the external system may communicate with each other in order to send commands, status indications, sensor readings and the like.
Figure 24 illustratespool cleaning robot 20 as including acommunication unit 18 and theexternal system 200 as including acommunication unit 108. The communication can be wireless and/or wired communication.Pool cleaning robot 20 may include one or more of the elements illustrated in the previous figures- such ascontroller 29 and/orsensor 11. -
External system 100 may include one or more of the elements illustrated in the previous figures- such ascontroller 102 and/orsensor 92. -
Figure 25 illustrates apool cleaning robot 20 that includes aninterface manipulator 19 for rotatinghandle 12 about arotation axis 28. Theinterface manipulator 19 may be a motor that may be controlled by acontroller 29. -
Figure 27 illustratesmethod 200 according to an example. -
Method 200 may include step 210 of pulling a cable that may be coupled to the pool cleaning robot during an exit process during which the pool cleaning robot exits the pool. - Step 210 may be followed by
step 220 of controlling, by a controller of a system and/or the pool cleaning robot, the pulling of the cable based on an estimated or an actual amount of the fluid within the pool cleaning robot. - The system may be positioned at a predefined distance (for example between 30 centimeters and 2 meters or more) from an edge of the pool. No part of the system may be directly above the water of the pool.
- The pulling may be executed by a motor and a reel; and wherein a part of the reel may be positioned below the edge of the pool. See, for example,
system 200 offigures 7-18 . - Exiting the pool while forcing water out of the pool cleaning robot
- It has been found that forcing the water to exit the pool cleaning robot during an exit process from the pool may speed up the exit process and may reduce a load imposed, during the exit process, on the pool cleaning robot and/or a docking station that may participate in the exit process.
- It should be noted that a third device (such as an additional controller) may participate in the pool exit process.
- Additionally or alternatively, the load may be reduced by allowing the pool cleaning robot to depart from the sidewall of the pool.Instead of trying to rotate the pool cleaning robot from a vertical position (when climbing a vertical sidewall of the pool) the pool cleaning robot is allowed to depart from the sidewall of the pool and start the exit process while being non-vertical. This reduces the force that is required to apply when the pool cleaning robot exits the pool.
- When the pool cleaning robot cleans the pool an impeller of the pool cleaning robot is rotated at a first direction thereby causing the water to enter through a first opening, (optionally pass through a unidirectional valve), pass through the filtering unit (to be cleaned) and then exit through a second opening.
- The pool cleaning robot may force the water (inside the pool cleaning robot) to exit the pool cleaning robot by reversing the direction of rotation of the impeller. Accordingly, the impeller will be rotated at a second direction (opposite or counter to the first direction).
- Rotating the impeller at the second direction may cause the water within the pool cleaning robot to exit through the first opening - in case where the water can exit from the first opening. For example - when there is no unidirectional valve that prevents the passage of the water from the filtering unit to the first opening.
- Rotating the impeller at the first direction may cause the water to exit through one or more other openings.
- The water may exit the pool cleaning robot as a water jet or in any other manner.
-
Figures 29 and30 illustrate jets ofwater 501 that exit from the pool cleaning robot from one or more openings (not shown). A non-limiting example of openings through which jets of water may exit are illustrated inUS patent application serial number 2014/0230168 which is incorporated herein by reference in its entirety. -
Figures 32 and33 illustrate arear door 27 that once opened allows the water to exit the pool cleaning robot through the rear door. - The openings may be formed in any part of the pool cleaning robot, may be of any shape and/or size.Especially, an opening through which water may exit may be positioned at the bottom of the housing, at the top of the housing and/or at any sidewall of the housing.
- Any opening through which the water may exit may be continuously opened, may be opened only under certain circumstances (for example opened when the pool cleaning robot is at least partially outside the water, when the pool cleaning robot is at certain angle in relation to the horizon, and the like), may be closed while the pool cleaning robot is submerged and cleans the pool, and the like.
- Each opening may be covered by a cover and/or seal and/or a door for closing the opening.
-
Figure 28 illustratesmethod 300 according to an example. -
Method 300 starts bystep 310 of determining to start a pool exit process.The pool exit process may start when the pool cleaning robot already climbed at least some of the sidewall of the pool. The pool cleaning robot may have reached the waterline, may be positioned at a predefined distance below the waterline (for example 5,10, 15, 20, 25, 30, 35, 40 centimeters below the waterline), may be partially above the waterline (a part of the robot may be above of the waterline), may be positioned at a certain position in relation to the edge of the pool, in relation to the bottom of the pool, at the bottom of the pool and the like. - Step 310 may include determining to start the pool exit process at a predefined period (for example one or few minutes) before an end of a cleaning cycle. Alternatively -
step 310 may be responsive to the state of the pool cleaning robot (end of cycle time, cleanliness of the filtering unit, an occurrence of a malfunction, sensing a certain high or low pressure/load of any other condition, such as the entering of a person to swim in the pool, that may require the pool cleaning robot to exit the pool.) For example-step 310 may include determining to exit the pool when a filter bag is sensed to be unclean, partially clogged or clogged and/or wherein the pool cleaning robot senses that there is a mechanical difficulty.The filtering unit may include one or more filters and the cleanliness of the filtering unit may include the cleanliness of the one or more filters. - Step 310 may also include determining to start the pool exit process when people enter the pool (their presence may be sensed by a sensor such as a pool sensor), when a person requests (for example by remote control) that the pool cleaning robot exits the pool and the like.
- The position of the pool cleaning robot may be sensed by a height sensor, by a water pressure sensor, or by any one or more other sensors. For example, the location of the pool cleaning robot in relation to the bottom of the pool may be determined by sensing that the robot started to climb a sidewall (for example by an accelerometer, by sensing the load imposed on the motor by or any other angle sensor) and measuring the distance that pool cleaning robot passes from the beginning of the climbing. The distance may be measured by sensing time and/orvelocity of the pool cleaning robot, by counting the rotations of the motor engine or wheel or any driving element of the pool cleaning robot).
- Additionally or alternatively, the position of the pool cleaning robot may be sensed by a sensor that differs from the pool cleaning robot.
- The sensor may be located within the pool, connected to the pool and/or positioned in proximity to the pool and/or positioned in any location that may cover the pool or at least an area of the pool from which the pool cleaning robot may exit the pool. For example- the sensor may be positioned at an area that is close to an external docking station at a certain distance (for example 5,10, 15, 20, 25, 30, 35, 40 centimeters below the waterline) below the edge of the pool.
- The sensor may belong to the docking station.
- The sensor may sense the location of the pool cleaner using image processing, magnetic or other proximity sensing, acoustic processing and the like. Once sensing that the pool cleaning robot reached a location that should trigger the pool exit process the unit may inform the pool cleaning robot to start the pool exit process.
- The preliminarypool exiting procedure may start with the electrical cord starting to pull the pool cleaner (cord becomes tense) while it is still somewhere at the bottom of the pool busy with its cleaning cycle time. The endeavor is to bring the cleaner near the meeting point between floor and wall, in the area and, importantly, in the vicinity of the docking station that serves as the optimal exit point en route to the docking station. The cord may then loosen up to allow the pool cleaner to start climbing the wall.
- Step 310 may be followed by
step 320 of stopping, by the pool cleaning robot, the climbing on the sidewall of the pool and disengaging from the sidewall of the pool. - Step 320 may include stopping the pump motor from operating in a first mode during which the pool cleaning robot climbs on the sidewall of the pool. In this mode the pump motor rotates an impeller at a first direction thereby causing water to be sucked to the pool cleaning robot through a first opening and assisting in maintaining the pool cleaning robot in contact with the sidewall of the pool.
- Stopping the pump motor from operating in the first mode causes the pool cleaning robot to disengage from the sidewall of the pool. (See
figure 29 ). - Step 320 may be followed by
step 330 of forcing water to exit from the pool cleaning robot. - Step 320 may be followed by
step 330 after a predefined period lapsed from the beginning ofstep 320. The predefined period may have any value, it may range between 0.1 and 30 seconds but may be more than 30 seconds. - During the predefined period the pool cleaning robot may be detached from the sidewall of the pool.
- Step 330 may include operating the pump motor at a second mode during which the pool cleaning robot expels water and floats on the water (at the waterline).
- In the second mode the pump motor rotates the impeller at a second direction that is opposite to the first direction. This causes water to exit through one or more openings of the pool cleaning robot.
- Step 330 may also include allowing air to enter the pool cleaning robot. The air may be sucked by the impeller.
- Step 330 may be followed by
step 340 of estimating or checking whether the pool cleaning robot to be light enough to enable the pool cleaning robot to exit the pool. The pool cleaning robot may be light enough when it expelled all or a substantial quantity of the water in the pool cleaning robot and/or when the weight of the water within the pool cleaning robot is below a water weight threshold and/or when the overall weight of the pool cleaning robot and the water within the pool cleaning robot is below an overall pool cleaning robot weight. - The water weight threshold and/or the overall pool cleaning robot weight or any other criterion related to the exit of the pool cleaning robot from the pool may be set by an operator of the pool cleaning robot, by a manufacturer of the pool cleaning robot, and the like.
- The checking may include using a group of one or more sensors. At least one sensor of the group may be included within the pool cleaning robot (see for
example sensor 11 offigure 7 and32 ). - Additionally or alternatively, at least one sensor of the group may be located elsewhere (see for
example sensor 92 offigures 2-3 and32 ). - The estimating may include estimating that the pool cleaning robot is light enough by tracking the progress of the exit process and estimating the amount of water that was drained from the pool cleaning robot. For example- measuring how long the pool cleaning robot was floating, how long the pool cleaning robot was at different positions (for example - the positioned illustrated in
figures 29 ,30 ,31 ,32 and33 ) may indicate the amount of water that was expelled - and thus the amount of water that still exists in the pool cleaning robot. - The estimation may be based on the time lapsed from the beginning of the pool exit process (of time lapsed from any point of the pool exit process). This time may be compared to a predefined period of time that were found to provide adequate water expelling.
- If it is determined that the pool cleaning robot is not light enough, then step 340 is followed by
step 330. - Step 330 and/or step 340 may be executed by the pool cleaning robot (for example by
controller 29 offigure 32 ), by the docking station (for example bycontroller 102 offigure 32 ), by both the pool cleaning robot and the docking station and the like. - For example, the weight of the pool cleaning robot may be sensed (directly or indirectly) by
sensor 92 of the docking station. Indirectly sensing may involve sensing the torque and/or strain ofcable 50. The detection signals ofsensor 92 may be sent to the pool cleaning robot that may determine whether the pool cleaning robot is light enough. Alternatively,controller 102 may determine whether the pool cleaning robot is light enough and send the determination to whether the pool cleaning robot is light enough. Alternatively,sensor 11 may sense (directly or indirectly) the weight of the pool cleaning robot. Indirectly may mean thatsensor 11 senses the amount of fluid within whether the pool cleaning robot is light enough (for example, by means of two water sensing electrodes). The detection signals ofsensor 92 may be processed bycontroller 29 and/or may be sent to the docking station that will determine whether the pool cleaning robot is light enough. - It is noted that the docking station may weigh the pool cleaning robot when the pool cleaning robot is located in the docking station. This weight measurement may be used to evaluate whether the pool cleaning robot was really light enough - and may be used for adjusting
step 340. For example- the duration ofstep 330 may be shortened if the weight of the pool cleaning robot is below the overall weight threshold. Yet for another example -the duration ofstep 330 may be increased if the weight of the pool cleaning robot is above the overall weight threshold. - If it is determined that the pool cleaning robot is light enough, then step 340 is followed by
step 350 of completing the pool exit process. -
Method 300 may include step 380 of pulling the pool cleaning robot towards the docking station. Step 380 may be executed by the docking station and/or by the pool cleaning robot. - Step 380 may be executed during at least one or more parts of
steps - Step 380 may include assisting, by the docking station, the pool cleaning robot to pass the edge of the pool and move towards the docking station.See, for example,
figures 33 and34 . -
Method 300 may also includestep 390 of operating the drive system of the pool cleaning robot. - Step 390 may be executed in parallel to at least one or more parts of
steps - Step 390 may include changing a speed of propagation of the pool cleaning robot during the pool exit process.
- For example, the velocity of propagation of the pool cleaning robot may be increased during step 350 (in comparison to the velocity of propagation during
steps 330 and 340). - Yet for another example, when the pool cleaning robot and/or the docking station senses that the pool cleaning robot encounters an obstacle (for example - see
figures 32 and33 - when the pool cleaning robot contacts the edge of the pool) the drive system of the pool cleaning robot may perform multiple corrective changes of direction (back and forth). - Yet for a further example - when an area of the pool cleaning robot that is not the front edge of the pool cleaning robot (for example see
figures 32 and33 ) contacts the edge of the pool - the pool cleaning robot may be maintained at the same position - and the driving system of the pool cleaning robot may provide enough drive to maintain the pool cleaning robot at that position - without slipping into the pool. - The pool exit process, a pool re-entry process and/or the progress of one or more steps of
method 300 may be assisted by reading information received from one or more sensor. For example-step 310 may start when the pool cleaning robot is at a certain position, the pool cleaning robot may enter or exitspace 200 and/or enter or exit thedocking station 200, thecover 202 may be positioned in one or more positions based on sensor readings. -
Figure 39 illustrateswater 10 of a pool, asidewall 30 of a pool, anexternal surface 40 of the pool,space 200,docking station 100 included inspace 200,pool cleaning robot 20,cover 202 andmultiple sensors - Sensors 801-808 illustrates various examples of locations of sensors -
sensor 801 is located withinsidewall 30 and/or connected to sidewall 30 and may sense the location of thepool cleaning robot 20 within the water of the pool. -
Sensor 802 is located withinexternal surface 40 and/or attached to theexternal surface 40.Sensor 803 is located above theexternal surface 40.Sensor 804 is positioned afterspace 200.Sensor 807 is attached to cover 202 and/or embedded to thecover 202.Sensor 804 is positioned abovecover 202.Sensor 804 is located above the pool.Each one ofsensors pool cleaning robot 20 on theexternal surface 40 and/or the climbing of thepool cleaning robot 20 on the edge of the pool.Sensors pool cleaning robot 20 within the pool. -
Sensors 808 is located withinspace 200 andsensor 806 is part of the docking station 200 (or attached to the docking station) and may sense the movements of thepool cleaning robot 20 withinspace 200. - Sensors 801-808 may be image sensor, visual sensor, acoustic sensors, radiation based sensors, radio frequency sensors, acoustic sensor, magnetic sensors and the like.
-
Figure 39 also illustrates an external controller 810 (external in the sense that the external controller does not belong to thepool cleaning robot 20 and does not belong to the docking station 100)- that may participate in controlling the exit of thepool cleaning robot 20 from the pool, the entering of thepool cleaning robot 20 tospace 200, the movements ofcover 202, the operation of the docking station, and the like. - For safety purposes, cover 202 may include a buzzer and/or a flashing LED to draw swimmers attention to when a cover opening or closing manoeuvre is underway.
-
External controller 810 may receive information from either one of sensors 801-808 and/or from thepool cleaning robot 20 and/or from thepool cleaning robot 20 and control the pool exit process, a pool re-entry process, the cleaning ofpool cleaning robot 20 or any maintenance operation performed by the docking station 100.For example, theexternal controller 810 may receive weight and/or stress reading and determine whether thepool cleaning robot 20 may exit the pool. -
Figures 47A and 47B illustratepool cleaning robot 20 according to an example. -
Figure 47A shows apool cleaning robot 20 that includescontroller 29,housing 222, animpeller 651, apump motor 652, filteringunit 618,rear door 27,drive motor 654,valve 614,wheels first opening 612 andsecond opening 653. -
Pool cleaning robot 20 may or may not include any component illustrated in any of the figures as belonging to the pool cleaning robot. - When operating in a first mode the
pump motor 652 may rotate theimpeller 651 at a first direction thereby forcing fluid to enter the pool cleaning robot fromfirst opening 612, pass throughvalve 614 be filtered by filtering unit 618 (includes one or more filters) and exit the pool cleaning robot viasecond opening 653. - When operating in a second mode the
pump motor 652 may rotate theimpeller 651 at a second direction (opposite to the first direction) thereby forcing fluid to enter thepool cleaning robot 20 fromsecond opening 653, and exit through the thirdopening 27' that is selectively covered byrear door 27. - In a
pool cleaning robot 200 that does not include valve 614 (or otherwise allows fluid to exit the pool cleaning robot via thefirst opening 612, and when operating at the second mode theimpeller 651 may force fluid to enter thepool cleaning robot 20 through thesecond opening 653 and exit through thefirst opening 612. -
Figure 47B illustrates apool cleaning robot 20 that includes additional openings such asfourth opening 656 and afifth opening 655.Fourth opening 655 may be formed at one side of thepool cleaning robot 20 while another opening (not shown) may be formed at an opposite side of Thepool cleaning robot 20. - The
pool cleaning robot 20 may have multiple openings that may be located at any location of thehousing 222 and may have any shape and size. These openings may be used for jetting fluid (seejets 501 offigure 10 ) that may also assist in driving and/or maneuvering thepool cleaning robot 20. - Each opening may be preceded by a fluid conduit and/or a fluid manipulator for selectively driving fluid through the opening. See, for example, the different openings for jetting water and the fluid manipulation components of
US patent application serial number 2014/0230168 which is incorporated herein by reference in its entirety. -
Figures 48A, 48B and 48C illustratepool cleaning robot 20 according to at leastone embodiment of the invention. -
Figure 48A illustrates apool cleaning robot 20 that includescontroller 29,housing 222, animpeller 651, apump motor 652, filteringunit 618,rear door 27, third opening 27', drivemotor 654,wheels second opening 653 andfluid control unit 617. -
Fluid control unit 617 control the passage of fluid through thefirst opening 617. - When the
pool cleaning robot 20 cleans the pool (for example when it is in a first mode) thefluid control unit 617 allows the passage of water into the pool cleaning robot 20 (through first opening 612) and prevents the passage of fluid from thepool cleaning robot 20 to the pool (through first opening 612). - When the
pool cleaning robot 20 wishes to extract fluid from the pool cleaning robot 20 (during a third mode) while preventing fluid to enter the pool cleaning robot throughfirst opening 612 thefluid control unit 617 may prevent the passage of fluid into thepool cleaning robot 20 throughfirst opening 612. - This may allow the
pool cleaning robot 20 to extract or empty water during a pool exit process (or at any other time) without changing the direction of rotation of the impeller. - The
fluid control unit 617 may include valve that may be operate as a uni-directional valve such as a flexible rubber or as a seal. - The
fluid control unit 617 may include a stopper orlimiter 618 for preventing thevalve 614 from opening when thepool cleaning robot 20 is operated at the third mode. -
Figures 48A-48C illustrate alimiter 618 that may rotate about an axis and selectively preventvalve 614 from opening or not preventvalve 614 from opening. -
Figure 48A illustrates thepool cleaning robot 20 when operating at the first mode whilefigures 48B and 48C illustrate thepool cleaning robot 20 when operating at the second or third mode. -
Pool cleaning robot 20 may or may not include any component illustrated in any of the figures as belonging to the pool cleaning robot. - When operating in a first mode the
pump motor 652 may rotate theimpeller 651 at a first direction thereby forcing fluid to enter the pool cleaning robot fromfirst opening 612, pass throughvalve 614 be filtered by filtering unit 618 (includes one or more filters) and exit the pool cleaning robot viasecond opening 653. - When operating in a second mode the
pump motor 652 may rotate theimpeller 651 at a second direction (opposite to the first direction) thereby forcing fluid to enter thepool cleaning robot 20 fromsecond opening 653, and exit through the third opening 27' that is selectively covered byrear door 27 or through any unidirectional valve such as a flexible rubber or a seal mentioned above. -
US patent application illustrates uni-directional valve formed at the bottom of the external space and is arranged to facilitate draining of fluid at the withdrawal of a pool cleaning apparatus from the water.serial number 14/023,557 filing date September 11, 2013 - When executing
method 300 the pool cleaning robot, instead of operating in the first mode, the pool cleaning robot may operate at a third mode and continue to rotate at the first direction (as of the first mode) while preventing water from exiting through the first opening. - This is reflected in
step 332 offigure 39 . -
Figures 29-34 illustrates various phases in the execution ofmethod 300. -
Figure 29 illustratespool cleaning robot 20 that is floating (the rear end ofpool cleaning robot 20 is above the waterline 16) and is spaced apart from thesidewall 30 of the pool. - Cable 50 (that connects the
handle 12 of thepool cleaning robot 20 to docking station 100) is not tense and thehandle 12 is in a closed position. -
Figure 29 also illustrates jets ofwater 501 that are expelled frompool cleaning robot 20,water 10 in which most ofpool cleaning robot 20 is immersed),external surface 40 and pool edge interfacing elements 530 (such as wheels or tubes located at a central area of the bottom of pool cleaning robot 20). The docking station is illustrated as includingreel 60 andwheel 80. -
Figure 30 illustratespool cleaning robot 20 that is floating (rear top edge is above waterline 16) and is spaced apart from thesidewall 30 of the pool.Cable 30 connects a third interfacing element (such as anchor 510) to adocking station 100 is not tense. -
Anchor 510 interfaces between cable50 andpool cleaning robot 20. The top edge ofanchor 510 may or may not be positioned above the housing ofpool cleaning robot 20.Anchor 510 may or may not be connected to the top of the housing of pool cleaning robot 20.The cable may be threaded through the interface. -
Figure 30 also illustrates jets ofwater 501 that are expelled frompool cleaning robot 20,water 10 in which most ofpool cleaning robot 20 is immersed). Infigure 30 thedocking station 100 is positioned withinspace 200 that may be covered bycover 202. Anaperture 203 may be formed within thecover 202 andcable 50 may pass throughaperture 203. - Cover 202 may be located at the same height as external surfaced 40 or may be located at a different height. Cover 202 can be a continuous cover or may include multiple apertures. Cover 202 may be a mesh or may have any shape and size.
- Cover 202 may open in various manners. For example, one edge of the cover may be elevated while another edge of
cover 202 may maintain at the same height. Both edges of the cover may be elevated, the cover may be coupled (in a detachable or non-detachable manner) to the external surface 40 (or any other element). Thecover 202 may slide along substantially horizontal tracks, may be rolled on a reel, and the like. The cover surface may be flush with 40. - The configuration illustrated in
figure 30 is beneficial in the sense that when thecover 202 is closed thecover 202 does not form an obstacle and does not disturb people from walking near the edge of the pool. - The
cover 202 may include one or more solar panels. -
Figure 31 illustratespool cleaning robot 20 that is floating (most ofpool cleaning robot 20 is above waterline 16) and is proximate (for example- between 1-15 centimeters) to thesidewall 30 of the pool.Cable 50 is tense.Anchor 510 is bent towardsdocking station 100.Pool cleaning robot 20 is in a horizontal position. -
Figure 32 illustratespool cleaning robot 20 that is partly outside thewater 10 of the pool and is positioned in a first intermediate positon in which water can be drained from the pool cleaning robot 20.A front area of the bottom of the pool cleaning robot contacts theedge 35 of the pool. The front area precedessecond interfacing elements 530. - The
pool cleaning robot 20 is tilted - the front edge ofpool cleaning robot 20 is higher thanedge 35 of the pool while the rear edge of thepool cleaning robot 20 is submerged and is lower than theedge 35 of the pool. - In
figure 32 arear door 27 is partially submerged and is open- is detaches from the housing (for example by gravity) and the water may be drained throughrear door 27. - The
door 27 may be pivotally coupled to the housing. See, for example door 908 ofUS patent application serial number 2014/0230168 . -
Figure 32 illustratespool cleaning robot 20 as further including (a)controller 29 for controlling the operation ofpool cleaning robot 20, (b)sensor 11, and (c)communication module 18. -
Figure 32 illustratesdocking station 100 as further includingcontroller 102 andsensor 92. -
Docking station 100 is located withinspace 200. -
Figure 33 illustratespool cleaning robot 20 thatis partly outside the water of the pool (most of thepool cleaning robot 20 is outside the water - the rear bottom part ofpool cleaning robot 20 is submerged). - Pool cleaning robot 20is positioned in a second intermediate positon in which water can be drained from the pool cleaning robot.
-
Second interfacing element 530 of the pool cleaning robot contacts theedge 35 of the pool. -
Docking station 100 is located withinspace 200. -
Figure 34 illustratespool cleaning robot 20 that is completely outside thewater 10 of the pool but is closer to theedge 35 of the pool than to thedocking station 100 according to an example.Pool cleaning robot 20 propagates by means of its own drive system onexternal surface 40 andcable 50 may not befully tensed but may be partially or fully tensed.Docking station 100 is located withinspace 200. - It should be noted that although
figures 30-34 illustrated adocking station 100 that was positioned below the edge of the pool andfigure 29 illustrated a docking station that was positioned above the edge of the pool - these are merely non-limiting examples of the position of the docking station. The pool exit process may be executed with any docking stations that are positioned at any location or distance from the pool edge. -
Figures 35 and36 illustratepool cleaning robot 20 anddocking station 100 according to an example. - In both figures the docking station is a "underground" or "concealed" docking station that is positioned within a
space 200 that is covered bycover 202. - In
figure 35 thecover 202 is in an OPEN position and infigure 36 thecover 202 is in a CLOSED position. - The
cover 202 may be rotated at one end byfirst motor 540 and may be elevated at another end byrod 560 that is moved by asecond motor 550. Infigure 35 thefirst motor 540 performs a rotational movement whilesecond motor 550 performs a linear movement. - The
cover 202 is positioned at the OPEN position by a coordinated movements induced by first and/orsecond motors cover 202 may be positioned in the OPEN position by a movement of only one of the motors. - The
cover 202 may be hinged and moved to the OPEN position by elevating one side (as shown infigure 35 ) or more sides of thecover 202. For example-first motor 540 may be replaced byrod 560 andsecond motor 550 thereby elevating theentire cover 202. - Any combination of motors and interfacing elements may be used for moving the
cover 202 between an OPEN and CLOSED positions. - The
cover 202 may be moved between multiple positions as long as one or more positions will allow pool cleaning robot to enterspace 200 and one or more other positions will allowcover 202 to at least a partiallyclose space 200. See, for example,figures 40 ,41 ,42 ,43 and44 . - For example- instead of an elevation and a lowering of cover 202 -
cover 202 may move between the OPEN and CLOSED positions by rotation, by a horizontal movement, by rolling cover onto a reel, and the like. - Cover 202 may be rigid or flexible. When flexible,
cover 202 may be supported by structural elements (such as rods or bars). The structural elements may be static or may move from an OPEN position to a CLOSED position. The structural elements may slide in or outside of the sidewalls ofspace 200. - The
cover 202 and/or the combination ofcover 202 and the structural elements may withstand a person that steps oncover 202 and/or may run or jump oncover 202. - First and
second motors controller 29 may send control signals), may be controlled bydocking station 100 or may be controlled by any other controller (not shown). - The first and
second motors - Additionally or alternatively, the one or more sensors may sense that
pool cleaning robot 20 is approaching thecover 202, that thepool cleaning robot 20 enteredspace 200, that thepool cleaning robot 20 is moving towards an exit ofspace 200, and the like. - These one or more sensor may be embedded in the
external surface 40, in the sidewalls ofspace 200, in the docking station and the like. These one or more sensors may be image sensor, visual sensors, magnetic sensors, weight sensors, accelerometers, proximity sensor and the like. -
Figure 35 illustrates aninclined interface 580 that has a top edge that interfaces with the top of external surface and a bottom edge that is located at the level of the bottom of thedocking station 100. It is noted that the top and bottom edges may be positioned at heights that differ from those illustrated infigure 35 . -
Inclined interface 580 may or may not include a linear or non-linear surface, may or may not be curved, may be smooth (seefigure 36 ) or may be non-smooth (seefigure 35 ) and/or may or may not include (or be connected to) steps, grooves, protuberances, and the like. - A non-smooth inclined interface may reduce the chance that pool cleaning
robot 20 will slip downwards and/or may ease the climbing ofpool cleaning robot 20 on theinclined interface 580. - The inclined surface may contact the
docking station 100 and/or may be spaced apart from the docking station. -
Figure 29 also illustrates afluid system 590 that is positioned below thedocking station 100.Fluid system 590 may be a drainage system that may drain water that is still in thepool cleaning robot 20 and/or drain water orother fluid after the water or other fluid cleans the pool cleaning robot. - Fluid system 590 (especially when operating as a drainage system) may be preceded by a shredding system (not shown) for shredding debris extracted from
pool cleaning robot 20 or from a used filter extracted frompool cleaning robot 20. - It should be noted that
fluid system 590 may be used for providing fluid or water to thedocking station 100 and/or may be used for cleaningpool cleaning robot 20. -
Figures 40A and 40B illustratewater 10 of a pool, sidewall 30 of a pool, external surface 400 of the pool,space 200,docking station 100,pool cleaning robot 20 and cover 202 according to an example. Cover 202 is moved bycover motor 702 within and out of opening 704 between an OPEN position (40B) and a CLOSED position (40A). Cover 202 performs a linear movement but any other movement may be provided. - When in OPEN position the
pool cleaning robot 20 may enterspace 200 and reachdocking station 100. - Cover 202 may be moved by more than a single engine.
- Rails and/or other support elements may be positioned within
space 200 and may supportcover 202. -
Motor 702 may be located withinopening 704. Opening 704 may include rails, and the like. -
Figures 41A and 41B illustratewater 10 of a pool, sidewall 30 of a pool, external surface 400 of the pool,space 200,docking station 100,pool cleaning robot 20 and cover 202 according to an example. Cover 202 is flexible and can be rolled by rollingunit 710 between an OPEN position (41B) and a CLOSED position (41A). The rolling unit may have a rolling drum. -
Rolling unit 710 may include a motor and a rolling mechanism. - The
cover 202 may or may not be supported by supporting elements such asrods 714. Rods may be constant or may move within or outside space 200.There may be a single supporting element and/or more than two supporting elements. The supporting elements may be of any shape and/or size. -
Figures 42A and 42B are top views ofspace 200 according to various embodiment of the invention. -
Figure 42A shows eitherfixed rods 714 or rods at their supporting position.Figure 42B illustrates threerods 714 that are at their supporting position but may be moved to a concealed (or non-supporting) position bymotors 716. The motors may moverods 714 within oroutside openings 718 formed in the exterior of the pool. - The
rods 714 are shown as being normal to the longitudinal axis of space 200- but there may be any spatial relationship between the rods and space. - For example-
rods 714 may be vertical and connected to the bottom ofspace 200. -
Figures 43A, 43B, 43B and 43D illustratevarious covers 202 according to various embodiment of the invention. - Cover 202 may be a mesh or an aperture net (43A).
- Cover 202 may include a
fixed part 2023 and twomovable parts 2021 and 2022 (closed position-figure 43B ) that may be moved (linear movements - 43D, rotational movement - 43C or any other combination of movements) that may be moved between different positions thereby closingspace 200 or only partially closingspace 200. - The
cover 202 may include any combination of parts that may be able to move in order to selectively open andclose space 200. -
Figures 44A and 44B illustratewater 10 of a pool, sidewall 30 of a pool, external surface 400 of the pool,space 200,docking station 100,pool cleaning robot 20,cover 202 and anelevator 660 according to various embodiment of the invention. - The elevator 600 includes an
elevator shaft 665, anelevator interface 661 for supporting the pool cleaning robot and a movement mechanism (illustrated as includingmotor 664 and ropes or stick 662) for moving theelevator interface 661 within theelevator shaft 665 between an upper position for receiving thepool cleaning robot 20 from external surface 40 (44A) and a lower position for providing the pool cleaning robot to the docking station 100 (44B) -and vice versa. -
Figure 37 illustrates apool cleaning robot 20 according to an example. -
Figure 37 illustrates apool cleaning robot 20 that include a third interfacing element such asanchors Anchor 511 is a spring or may include a spring that can be attached to thepool cleaning robot 20 and tocable 50.Anchor 510 may be elastic or plastic andfigure 37 illustrates an elastic anchor.Figure 37 illustrates rod-shaped anchors but anchors 510 and 511 may have any shape including that of a partly-round or square handle (not shown)that maybe constructed of elastic or plastic stiff/semi-rigid material or of a spring mechanism or a combination of both anelastic and a spring that are bendable wherebyall anchor embodiments are constructed using shape-memory material technologies. -
Anchors Figure 37 illustrates an angular range of about 30 degrees (between vertical position to 60 degrees) - but any angular edge may be provided. -
Anchors 510 may include a single joint or part or may include multiple parts. For example-anchor 510 may include multiple joints that may be move in relation to each other. The anchor may be a telescopic rod. - The cable50 may be attached to or may be
threadedthrough anchor 510 by any mean- by a ring, by a fastening element, the cable may pass through one or more apertures of anchor, and the like. -
Figure 37 also illustratespool cleaning robot 20 as includingwheels 13 and 14 - although any interfacing element may be used with or without tracks that can be observed inFigure 37 . -
Figure 37 further shows third interfacing elements such as set of rollingrods 530 that cover a central area of the bottom of thepool cleaning robot 20. The rods may be static or may rotate about their axis.Figure 37 illustrates nine rods although any number of rods may be provided. The rods may differ from each other or may be equal to each other. The rods may be small enough such as not to contactexternal surface 40 whenpool cleaning robot 20 moves along theexternal surface 40. -
Figure 38 illustrates apool cleaning robot 20 and afilter cleaning unit 610 of the docking station according to an example. -
Pool cleaning robot 20 is illustrated as including filteringunit 618 andopening 612. During a filter cleaning process,a part of a cleaning unit 610 (such as a pop-up sprinkler620) may enter through theopening 612 into thefiltering unit 618. - The pop-up
sprinkler 620 may have a cross section that is smaller than theopening 612 thereby the pop-up sprinkler may, even when passing through theopening 612, may not seal theopening 612 and may leave a space for fluid and/or debris to exit the pool cleaning robot through theopening 612 during the cleaning process. The cross section of the pop-up sprinkler and/or the opening may have any shape and/or size. The cross section of the pop-up sprinkler may have the same shape or may differ from each other by shape. - The pop-up
sprinkler 620 may include a valve 613. The valve 613 may be a ball valve that creates intermittent water jet spray thrusts to improve and create powerful streams of internal nozzle spraying to remove stubborn dirt or debris attached. Multiple nozzles or openings may be employed with varying nozzle diameter apertures along the pop up sprinkler rod. This is especially important in initial cleaning cycles when season starts and the dirt from the previous bathing season clings hard onto the filter surfaces. - The additional liquid container containing cleaning fluid such as, for examplean anti-calc substance may be used to mix this said liquid with the spraying water (see rectangular box on the left of "612")
- Electrical and water inlets see on the right "630".
- The pop-up
sprinkler 620 may be rotated about an axis or not. - The pop-up
sprinkler 620 may be made of a rigid material or of a softer material such as soft rubber that will inflate into the interior space of the filter or as stated above, expand/contract telescopically. The process will be preferably mechanical but may be subject to an electrical/electronic control. - It is noted that the pop-up
sprinkler 620 is merely a non-limiting example of a cleaning element. Other cleaning elements may include, for example, elastic and/or non-elastic cleaning elements, cleaning elements that include a hollow tube or a hollow bag with a fluid inlet and a fluid outlet, pop-up cleaning elements that are not rods, telescopic cleaning elements, cleaning elements that do not pop-up, and the like. - The operation of the pop-up sprinkler is as follows: as the filter becomes clogged during normal cycle time in-pool operation while the pool cleaning robot is submerged, the pool cleaner records the level of clogging and will classify it to anything between severely clogged to containing some minor dirt. This will becommunicated to the controller of the docking station to determine a cleaning process that may fit the state of the filtering unit. The sensing of the state of the filtering unit may be sensed by monitoring the power consumed by the pump motor (cleaner filtering unit results in lower power consumption), the rotational speed of the impeller (a cleaner filtering unit results in faster revolutions of the impeller), by a pressure sensor (a cleaner filtering unit results in lower pressure levels within the pool cleaning robot),inspecting the filtering unit with a sensor, and the like. The said sensing may be performed externally to the pool while, for example, in the docking station by means of an image sensor for imaging the filtering unit.
- It should be noted the
pool cleaning robot 20 may communicate (directly or indirectly) with any one of thedocking stations 100 that have any cleaning element (even those that do not includes pop-up sprinkler 620) so that thedocking station 100 will determine (select and/or calculate) a cleaning process and then apply a cleaning process that is fitted to state of the pool cleaning robot 20 - especially to the cleanliness of the filtering unit. - The determining of the cleaning process may be performed by another device (such as external controller or any computerized system) and/or by the
pool cleaning robot 20 itself. - The determining of the cleaning process may include determining one or more cleaning parameters such as a duration of the cleaning process, durations of different phases in the cleaning process (for example duration of fluid pulses), the composition of a cleaning fluid (more or less anti-calc materials, more or less PH, and the like), which cleaning elements to use (for example using a brush or not, the number of cleaning elements to be used, and the like.
-
Figure 45 illustratespool cleaning robot 20 and a cleaning element such as anapertured bag 640 according to an example. - The flow of
water 691 and/or cleaning fluid through theaperture bag 640 may erect the aperture bag and cause jets of the water and/or cleaningfluid 691 to exit the aperture bag through apertures and clean the interior offiltering unit 618. - Multiple nozzles or openings may be employed with varying nozzle or apertures diameters along theapertured bag.
- Debris and/or used water and/or cleaning fluid may exit the pool cleaning robot via opening 612 (see arrow 692).
-
Figure 45 also showswheels valve 614 of the pool cleaning robot that is at an open position. -
Figure 46A illustratespool cleaning robot 20, a cleaning element such as anaperture bag 640 and an additional cleaning element such asbrush 650 according to an example. - The
brush 650 can assist the cleaning of thefiltering unit 618 by contacting thefiltering unit 618 or by being positioned at the proximity to thefiltering unit 618 thereby contacting (and thus removing) debris stuck in thefiltering unit 618. Thebrush 650 may be elevated and/or rotated bymanipulator 652. - Debris and/or used water and/or cleaning fluid may exit the pool cleaning robot via opening 612 (see arrow 692).
-
Figure 46A also showswheels valve 614 of the pool cleaning robot that is at an open position. -
FIG. 46B illustrates apool cleaning robot 20, acleaning element 610 andsensor 657 according to an example; - The
sensor 657 does not belong to the pool cleaning robot and may belong to thedocking station 100. Thesensor 657 may sense the cleanliness of the filtering unit (for example by imaging parts of the filtering unit) and send information to a controller (such as controller 102) for determining parameters of the cleaning process.Sensor 657 may be moved within the filtering unit bymanipulator 658. - Where more than one filtering unit is in place in a pool cleaner, for example, a second filter (not shown) with a second opening inlet, there could be provided a second or morecleaning unit 610 (not shown) such as a pop-up
sprinkler 620 oraperture bags 640 - It has been found that forcing the water to exit the pool cleaning robot during an exit process from the pool may speed up the exit process and may reduce a load imposed, during the exit process, on the pool cleaning robot and/or a docking station that may participate in the exit process.
- Additionally or alternatively, the load may be reduced by allowing the pool cleaning robot to depart from the sidewall of the pool.Instead of trying to rotate the pool cleaning robot from a vertical position (when climbing a vertical sidewall of the pool) the pool cleaning robot is allowed to depart from the sidewall of the pool and start the exit process while being non-vertical. This reduces the force that is required to apply when the pool cleaning robot exits the pool.
- When the pool cleaning robot cleans the pool an impeller of the pool cleaning robot is rotated at a first direction thereby causing the water to enter through a first opening, (optionally pass through a unidirectional valve), pass through the filtering unit (to be cleaned) and then exit through a second opening.
- The pool cleaning robot may force the water (inside the pool cleaning robot) to exit the pool cleaning robot by reversing the direction of rotation of the impeller. Accordingly, the impeller will be rotated at a second direction (opposite or counter to the first direction).
- Rotating the impeller at the second direction may cause the water within the pool cleaning robot to exit through the first opening - in case where the water can exit from the first opening. For example - when there is no unidirectional valve that prevents the passage of the water from the filtering unit to the first opening.
- Rotating the impeller at the first direction may cause the water to exit through one or more other openings such as a third opening and/or a fourth opening and the like.
- The water may exit the pool cleaning robot as a water jet or in any other manner.
-
Figures 29 and30 illustrate jets ofwater 501 that exit from the pool cleaning robot from one or more openings (not shown). A non-limiting example of openings through which jets of water may exit are illustrated inUS patent application serial number 2014/0230168 . -
Figures 32 and33 illustrate arear door 27 that once opened allows the water to exit the pool cleaning robot through the rear door. - The openings may be formed in any part of the pool cleaning robot, may be of any shape and/or size.Especially, an opening through which water may exit may be positioned at the bottom of the housing, at the top of the housing and/or at any sidewall of the housing.
- Any opening through which the water may exit may be continuously opened, may be opened only under certain circumstances (for example opened when the pool cleaning robot is at least partially outside the water, when the pool cleaning robot is at certain angle in relation to the horizon, and the like), may be closed while the pool cleaning robot is submerged and cleans the pool, and the like.
- Each opening may be covered by a cover and/or seal and/or a door for closing the opening.
-
Figure 50 illustratesmethod 5000 that may includestep 5010 of moving the pool cleaning robot at a path that leads outside the pool, and step 5020 of forcing, during at least a part of the moving of the pool cleaning robot, water to exit the pool cleaning robot by rotating an impeller of the pool cleaning robot. -
Step 5010 may include climbing, by the pool cleaning robot, on a sidewall of a pool while rotating the impeller at a first direction; wherein the climbing is followed by stopping, by the pool cleaning robot, the climbing on the sidewall of the pool and disengaging from the sidewall of the pool. - Moreover, the terms "front, " "back, " "top, " "bottom, " "over, " "under " and the like in the description and in the claims, if any, are used for descriptive purposes and not necessarily for describing permanent relative positions. It is understood that the terms so used are interchangeable under appropriate circumstances such that the at least one embodiment of the invention described herein are, for example, capable of operation in other orientations than those illustrated or otherwise described herein.
- Also for example, in one embodiment, the illustrated examples may be implemented as circuitry located on a single integrated circuit or within a same device. Alternatively, the examples may be implemented as any number of separate integrated circuits or separate devices interconnected with each other in a suitable manner.
- Also for example, the examples, or portions thereof, may implemented as soft or code representations of physical circuitry or of logical representations convertible into physical circuitry, such as in a hardware description language of any appropriate type.
- Also, the invention is not limited to physical devices or units implemented in non-programmable hardware but can also be applied in programmable devices or units able to perform the desired device functions by operating in accordance with suitable program code, such as mainframes, minicomputers, servers, workstations, personal computers, notepads, personal digital assistants, electronic games, automotive and other embedded systems, cell phones and various other wireless devices, commonly denoted in this application as 'computer systems'.
- However, other modifications, variations and alternatives are also possible. The specifications and drawings are, accordingly, to be regarded in an illustrative rather than in a restrictive sense.
- In the claims, any reference signs placed between parentheses shall not be construed as limiting the claim. The word 'comprising' does not exclude the presence of other elements or steps then those listed in a claim. Furthermore, the terms "a" or "an," as used herein, are defined as one as or more than one. Also, the use of introductory phrases such as "at least one " and "one or more " in the claims should not be construed to imply that the introduction of another claim element by the indefinite articles "a " or "an " limits any particular claim containing such introduced claim element to inventions containing only one such element, even when the same claim includes the introductory phrases "one or more " or "at least one " and indefinite articles such as "a " or "an. " The same holds true for the use of definite articles. Unless stated otherwise, terms such as "first" and "second" are used to arbitrarily distinguish between the elements such terms describe. Thus, these terms are not necessarily intended to indicate temporal or other prioritization of such elements the mere fact that certain measures are recited in mutually different claims does not indicate that a combination of these measures cannot be used to advantage.
- Any system, apparatus or device referred to this patent application includes at least one hardware component.
- While certain features of the invention have been illustrated and described herein, many modifications, substitutions, changes, and equivalents will now occur to those of ordinary skill in the art. It is, therefore, to be understood that the appended claims define the scope of the invention.
Claims (17)
- A system for cleaning a pool cleaning robot (20), the system comprises a controller (102), a communication system (18,200) and a cleaning unit (610); characterised in that the communication system is configured to receive information about a cleanliness of a filtering unit (618) of the pool cleaning robot; wherein the controller is configured to determine, based on the cleanliness of the filtering unit, a cleaning process to be applied on the pool cleaning robot by the system; and wherein the cleaning unit is configured to apply the cleaning process on the pool cleaning robot.
- The system according to claim 1 wherein the controller is configured to determine at least one parameter out of (a) a duration of the cleaning process, (b) a duration of one or more phases of the cleaning process, (c) a cleaning material to be used during the cleaning process, and (d) one or more cleaning materials to be used during one or more phases of the cleaning process.
- The system according to claim 1 wherein the cleaning unit comprises a cleaning element (620) that is configured, once positioned within a space surrounded by the filtering unit of the pool cleaning robot, to direct fluid towards an interior of the filtering unit.
- The system according to claim 3 wherein the cleaning element is a nozzled pop-up water jets thrusting sprinkler.
- The system according to claim 3 wherein the cleaning element water jets thrusting power is augmented using a valve (613).
- The system according to claim 3 wherein the cleaning element is an apertured bag (640).
- The system according to claim 3 wherein the cleaning unit comprises a cleaning element manipulator (652) for determining a spatial relationship between the cleaning element and the filtering unit.
- The system according to claim 3 wherein the cleaning element is rigid.
- The system according to claim 3 wherein the cleaning element is elastic.
- The system according to claim 3 wherein the cleaning unit comprises an additional cleaning element (650) for contacting the interior of the filtering unit during the cleaning process.
- The system according to claim 3 wherein the cleaning unit comprises an additional cleaning element (650) for contacting, during the cleaning process, debris that extend from the interior of the filtering unit without contacting the filtering unit.
- The system according to claim 3 wherein the cleaning element, once inserted through a first opening of the pool cleaning robot into a space surrounded by the filtering unit of the pool cleaning robot, blocks only a part of the first opening.
- The system according to claim 1 comprising a sensor (657) that is configured to sense a cleanliness of a filtering unit of the pool cleaning robot, once positioned within a space surrounded by the filtering unit of the pool cleaning robot.
- A method for cleaning a pool cleaning robot (20), the method comprises determining by a docking station a cleaning process that is fitted to a cleanliness of a filtering unit of pool cleaning robot; and applying the cleaning process.
- The method according to claim 14 comprising determining at least one parameter out of (a) a duration of the cleaning process, (b) a duration of one or more phases of the cleaning process, (c) a cleaning material to be used during the cleaning process, and (d) one or more cleaning materials to be used during one or more phases of the cleaning process.
- The method according to claim 14 comprising sensing, by a sensor of the pool cleaning robot the cleanliness of the filtering unit while submerged in water.
- The method according to claim 16 wherein the sensor is selected out of (a) a power sensor for monitoring power consumed by a pump motor of the pool cleaning unit; (b) an image sensor for imaging the filtering unit, (c) a rotation sensor for sensing a rotational speed of an impeller of the pool cleaning unit; (d) a pressure sensor for sensing a pressure level within the pool cleaning robot.
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/089,606 US10533335B2 (en) | 2013-10-13 | 2016-04-04 | Autonomous pool cleaning robot |
| US201615231396A | 2016-08-08 | 2016-08-08 | |
| US15/231,431 US10260248B2 (en) | 2013-10-13 | 2016-08-08 | Pool cleaning robot and a method for cleaning the pool cleaning robot |
| US15/231,200 US10723571B2 (en) | 2013-10-13 | 2016-08-08 | Pool cleaning robot having an interface |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3228785A1 EP3228785A1 (en) | 2017-10-11 |
| EP3228785B1 true EP3228785B1 (en) | 2021-11-17 |
Family
ID=58314143
Family Applications (4)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP17162375.4A Active EP3228782B1 (en) | 2016-04-04 | 2017-03-22 | Pool cleaning robot and a method for extracting the pool cleaning robot from a pool |
| EP17162377.0A Active EP3228784B1 (en) | 2016-04-04 | 2017-03-22 | System for maintaining a pool cleaning robot |
| EP17162378.8A Active EP3228785B1 (en) | 2016-04-04 | 2017-03-22 | Pool cleaning robot and a method for cleaning the pool cleaning robot |
| EP17162376.2A Active EP3228783B1 (en) | 2016-04-04 | 2017-03-22 | Pool cleaning robot |
Family Applications Before (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP17162375.4A Active EP3228782B1 (en) | 2016-04-04 | 2017-03-22 | Pool cleaning robot and a method for extracting the pool cleaning robot from a pool |
| EP17162377.0A Active EP3228784B1 (en) | 2016-04-04 | 2017-03-22 | System for maintaining a pool cleaning robot |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP17162376.2A Active EP3228783B1 (en) | 2016-04-04 | 2017-03-22 | Pool cleaning robot |
Country Status (2)
| Country | Link |
|---|---|
| EP (4) | EP3228782B1 (en) |
| ES (2) | ES2954602T3 (en) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110886522A (en) * | 2019-11-04 | 2020-03-17 | 杭州西子智能停车股份有限公司 | Vehicle carrier |
| CN112096133B (en) * | 2020-09-10 | 2022-03-08 | 三峡大学 | Cleaning vehicle capable of automatically cleaning wall of swimming pool and cleaning method thereof |
| US20220349200A1 (en) * | 2021-04-30 | 2022-11-03 | Zodiac Pool Care Europe | Cable storage concepts principally for use in connection with automatic swimming pool cleaners |
| WO2023187592A1 (en) * | 2022-03-29 | 2023-10-05 | Zodiac Pool Care Europe | Automatic swimming pool cleaner systems with improved visual communication |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2742351B1 (en) * | 1995-12-13 | 1998-04-30 | Hexagone | DEVICE FOR AUTOMATIC CLEANING OF THE FILTERING MEANS OF A POOL MAINTENANCE ROBOT |
| US8434182B2 (en) * | 1999-01-25 | 2013-05-07 | Aqua Products, Inc. | Pool cleaner with high pressure cleaning jets |
| IL156535A (en) * | 2003-06-19 | 2006-12-10 | Maytronics Ltd | Pool cleaning apparatus |
| US6971124B2 (en) * | 2003-10-14 | 2005-12-06 | Andrew L Pansini | Pool cleaner storage arrangement |
| ITFI20050234A1 (en) * | 2005-11-15 | 2007-05-16 | Fabio Bernini | AUTOMATIC POOL CLEANER |
| US9388595B2 (en) * | 2012-07-10 | 2016-07-12 | Aqua Products, Inc. | Pool cleaning system and method to automatically clean surfaces of a pool using images from a camera |
| US9091093B2 (en) * | 2012-07-10 | 2015-07-28 | Aqua Products, Inc. | Internal backwash system for robotic swimming pool cleaner |
| US9222275B2 (en) | 2012-09-11 | 2015-12-29 | Maytronics Ltd. | Pool cleaning robot having waterline movement capabilities |
| US20140137343A1 (en) * | 2012-11-20 | 2014-05-22 | Aqua Products, Inc. | Pool or tank cleaning vehicle with a powered brush |
| EP2743428B1 (en) * | 2012-12-17 | 2020-02-05 | Spectralight Technologies, Inc. | Pool cleaning robot |
| US9903130B2 (en) * | 2012-12-22 | 2018-02-27 | Maytronics Ltd. | Autonomous pool cleaning robot with an external docking station |
| US20140263087A1 (en) * | 2013-03-15 | 2014-09-18 | Hayward Industries, Inc. | Swimming Pool Cleaner With Docking System And/Or Other Related Systems And Methods |
| US9920545B2 (en) * | 2013-10-13 | 2018-03-20 | Maytronics Ltd. | Autonomous pool cleaning robot |
| WO2016026059A1 (en) * | 2014-08-19 | 2016-02-25 | Mueller Peter A | Storage housing for pool robot |
-
2017
- 2017-03-22 ES ES17162377T patent/ES2954602T3/en active Active
- 2017-03-22 EP EP17162375.4A patent/EP3228782B1/en active Active
- 2017-03-22 ES ES17162378T patent/ES2905270T3/en active Active
- 2017-03-22 EP EP17162377.0A patent/EP3228784B1/en active Active
- 2017-03-22 EP EP17162378.8A patent/EP3228785B1/en active Active
- 2017-03-22 EP EP17162376.2A patent/EP3228783B1/en active Active
Non-Patent Citations (1)
| Title |
|---|
| None * |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3228782A1 (en) | 2017-10-11 |
| EP3228782B1 (en) | 2022-05-25 |
| EP3228783A1 (en) | 2017-10-11 |
| EP3228785A1 (en) | 2017-10-11 |
| ES2954602T3 (en) | 2023-11-23 |
| EP3228783B1 (en) | 2024-10-23 |
| EP3228784B1 (en) | 2023-06-07 |
| ES2905270T3 (en) | 2022-04-07 |
| EP3228784C0 (en) | 2023-06-07 |
| EP3228784A1 (en) | 2017-10-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3081721B1 (en) | Autonomous pool cleaning robot | |
| US10260248B2 (en) | Pool cleaning robot and a method for cleaning the pool cleaning robot | |
| US11884498B2 (en) | Pool cleaning robot having an interface | |
| US10731370B2 (en) | Pool cleaning robot and a method for sensing a cleanliness of a filtering unit | |
| US20170057759A1 (en) | Pool cleaning robot and a method for extracting the pool cleaning robot from a pool | |
| EP3228785B1 (en) | Pool cleaning robot and a method for cleaning the pool cleaning robot | |
| US9982453B2 (en) | System for extracting a pool cleaning robot | |
| US9499996B2 (en) | Water removal from flexible cover | |
| US10718126B2 (en) | Self-propelled robotic swimming pool cleaner with retractably tethered floating buoy | |
| US20180155945A1 (en) | Self-propelled robotic swimming pool cleaner with extendible arms for climbing out of a swiiming pool | |
| US20190330869A1 (en) | Automatic pool cleaner with edge engagement assembly | |
| US20180208278A1 (en) | Ramped pontoon for retrieving a pool cleaner |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20180409 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| 17Q | First examination report despatched |
Effective date: 20191115 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20210609 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602017049331 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1448180 Country of ref document: AT Kind code of ref document: T Effective date: 20211215 |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: TRGR |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20211117 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2905270 Country of ref document: ES Kind code of ref document: T3 Effective date: 20220407 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211117 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211117 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211117 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220217 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220317 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220317 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211117 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220217 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211117 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211117 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211117 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220218 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211117 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211117 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211117 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211117 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211117 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211117 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602017049331 Country of ref document: DE |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20220818 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211117 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211117 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20220322 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211117 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20220331 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220322 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220322 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220322 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220331 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: UEP Ref document number: 1448180 Country of ref document: AT Kind code of ref document: T Effective date: 20211117 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20170322 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: AT Payment date: 20240321 Year of fee payment: 8 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211117 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211117 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20240320 Year of fee payment: 8 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SE Payment date: 20240320 Year of fee payment: 8 Ref country code: IT Payment date: 20240329 Year of fee payment: 8 Ref country code: FR Payment date: 20240328 Year of fee payment: 8 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 20240401 Year of fee payment: 8 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: ES Payment date: 20240429 Year of fee payment: 8 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211117 |