EP3160586B1 - Radiotherapy planning system and method - Google Patents
Radiotherapy planning system and method Download PDFInfo
- Publication number
- EP3160586B1 EP3160586B1 EP15732217.3A EP15732217A EP3160586B1 EP 3160586 B1 EP3160586 B1 EP 3160586B1 EP 15732217 A EP15732217 A EP 15732217A EP 3160586 B1 EP3160586 B1 EP 3160586B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- radiotherapy planning
- planning system
- solution
- pareto
- auto
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N5/00—Radiation therapy
- A61N5/10—X-ray therapy; Gamma-ray therapy; Particle-irradiation therapy
- A61N5/103—Treatment planning systems
- A61N5/1031—Treatment planning systems using a specific method of dose optimization
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N5/00—Radiation therapy
- A61N5/10—X-ray therapy; Gamma-ray therapy; Particle-irradiation therapy
- A61N5/1048—Monitoring, verifying, controlling systems and methods
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/12—Computing arrangements based on biological models using genetic models
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H20/00—ICT specially adapted for therapies or health-improving plans, e.g. for handling prescriptions, for steering therapy or for monitoring patient compliance
- G16H20/40—ICT specially adapted for therapies or health-improving plans, e.g. for handling prescriptions, for steering therapy or for monitoring patient compliance relating to mechanical, radiation or invasive therapies, e.g. surgery, laser therapy, dialysis or acupuncture
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H40/00—ICT specially adapted for the management or administration of healthcare resources or facilities; ICT specially adapted for the management or operation of medical equipment or devices
- G16H40/20—ICT specially adapted for the management or administration of healthcare resources or facilities; ICT specially adapted for the management or operation of medical equipment or devices for the management or administration of healthcare resources or facilities, e.g. managing hospital staff or surgery rooms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N5/00—Radiation therapy
- A61N5/10—X-ray therapy; Gamma-ray therapy; Particle-irradiation therapy
- A61N5/103—Treatment planning systems
- A61N5/1031—Treatment planning systems using a specific method of dose optimization
- A61N2005/1032—Genetic optimization methods
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N5/00—Radiation therapy
- A61N5/10—X-ray therapy; Gamma-ray therapy; Particle-irradiation therapy
- A61N5/1048—Monitoring, verifying, controlling systems and methods
- A61N2005/1074—Details of the control system, e.g. user interfaces
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N5/00—Radiation therapy
- A61N5/10—X-ray therapy; Gamma-ray therapy; Particle-irradiation therapy
- A61N5/103—Treatment planning systems
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H20/00—ICT specially adapted for therapies or health-improving plans, e.g. for handling prescriptions, for steering therapy or for monitoring patient compliance
Definitions
- the present invention relates to a radiotherapy planning system, a radiotherapy planning method, and a computer readable storage medium for determining a radiotherapy planning solution corresponding to a fluence profile.
- radiotherapy planning is to determine fast and accurately the best dose distribution (i.e., fluence beam profile) which can satisfy as much as possible all clinical goals. For instance, a certain dose must be delivered to the tumor, sparing as much as possible nearby organs at risk (OARs). Therefore, optimization problems in radiotherapy (RT) inverse planning are inherently multi-criteria problems since they involve multiple planning goals for tumor targets and neighboring critical tissue structures. Clinical decisions are generally required, commonly based on an assignment of importance weights among these conflicting goals until the clinical wishes appear satisfied. Satisfying the clinical wishes typically involves many repetitive optimizations.
- US2013197878A1 discloses a fluence and beam orientation optimization package for radiotherapy optimization, called PARETO (Pareto-Aware Radiotherapy Evolutionary Treatment Optimization), making use of a multi-objective genetic algorithm capable of optimizing several objective functions simultaneously and mapping the structure of their trade-off surface efficiently and in detail.
- PARETO generates a database of Pareto non-dominated solutions and allows the graphical exploration of trade-offs between multiple planning objectives during IMRT treatment planning.
- PARETO offers automated multi-objective treatment plan optimization, which does not require any objective weights to be chosen, and therefore finds a large sample of optimized solutions defining a trade-off surface, which represents the range of compromises that are possible.
- an auto-planning routine When invoked on a new patient, an auto-planning routine typically creates various target and normal tissue planning structures, sets up the beams and dose prescription, and loads customized intensity modulated radiation therapy (IMRT) objectives to start the optimization.
- Target objectives are based on the prescription dose
- organ at risk objectives are determined from a model that takes into account the geometric properties of the target and organs at risk to predict mean doses based on prior cases.
- IMRT intensity modulated radiation therapy
- a DVH-guided IMRT optimization algorithm for automatic treatment planning and adaptive radiotherapy replanning by M. Zarepisheh et al, Medical Physics, vol. 41, no. 6, page 061711 (2014 ) discloses an algorithm that automatically creates a treatment plan guided by the DVH curves of a reference plan that contains information on the clinician-approved dose-volume trade-offs among different targets/organs and among different portions of a DVH curve for an organ.
- the reference plan is the initial plan for the same patient, while for automatic treatment planning the reference plan is selected from a library of clinically approved and delivered plans of previously treated patients with similar medical conditions and geometry.
- the proposed algorithm employs a voxel-based optimization model and navigates the large voxel-based Pareto surface.
- the voxel weights are iteratively adjusted to approach a plan that is similar to the reference plan in terms of the DVHs. If the reference plan is feasible but not Pareto optimal, the algorithm generates a Pareto optimal plan with the DVHs better than the reference ones. If the reference plan is too restricting for the new geometry, the algorithm generates a Pareto plan with DVHs close to the reference ones. In both cases, the new plans have similar DVH trade-offs as the reference plans.
- Document WO 2014/068435 discloses therapy planning system and method for generating an optimal treatment plan.
- a plurality of objectives are automatically formulated based on a plurality of clinical goals. Further, a plurality of treatment plan parameters are optimized based on the plurality of objectives to generate a treatment plan. The plurality of objectives are reformulated and the plurality of treatment plan parameters are reoptimized based on the reformulated plurality of objectives to generate a reoptimized treatment plan. The optimizing is repeated based on the reformulated plurality of objectives to generate a reformulated treatment plan.
- a radiotherapy planning system for determining a solution corresponding to a fluence profile
- the radiotherapy planning system comprising: an auto-planned solution generation unit for automatically generating one or more auto-planned treatment plans based on one or more dose quality metrics; a weight assignment unit configured to assign a predetermined plurality of weights to said one or more dose quality metrics; a weight adjustment unit configured to adjust a selected weight from said plurality of weights; and a Pareto frontier navigation unit configured to generate said solution corresponding to said fluence profile in response to said adjusted selected weight.
- the radiotherapy planning system is configured to compare said solution to a clinical goal, wherein said radiotherapy planning system is further configured to generate a comparison signal indicative of whether or not said solution satisfies said clinical goal and to provide said solution as a warm start to generate a final auto-generated plan, if said comparison signal indicates that said solution does not satisfy said clinical goal.
- Another family of multi-criteria optimization approaches comprises the so-called "interactive methods".
- interactive methods a decision maker plays an important part and the idea is to support her/him in the search for the most preferred solution.
- steps of an iterative solution algorithm are repeated and the decision maker progressively provides preference information so that the most preferred solution can be found.
- the Pareto frontier navigator of the present invention is part of this last group of methods. Pareto navigators are known to the skilled person and described, e.g., in the article " Approximating convex Pareto surfaces in multiobjective radiotherapy planning", Med.Phys. (2006), 33(9) pp. 3399-3407, by D.L.
- GUI graphical user interface
- a first 'auto-generated' solution is produced, e.g., by using the Pinnacle 3 Auto-planning tool.
- the planner may either accept and deliver this solution (i.e., beam fluence profiles) or refine it.
- the present invention can be used to make the refinement step easier and faster.
- the initial position from where one starts to move within the Pareto solution space corresponds to the solution obtained at step 0.
- the user can move the sliders to further move towards a new local Pareto solution which may better fit his requirements.
- said radiotherapy planning system further comprises an auto-generated solution assessment unit for deciding whether at least one of said one or more auto-planned treatment plans satisfies a clinical goal.
- said radiotherapy planning system is configured to use a Pareto frontier navigator.
- a Pareto frontier navigator By using a Pareto frontier navigator, system is configured to use a Pareto frontier navigator.
- the radiotherapy planning system finds the best final plan within a local neighborhood of a limited set of auto-planned solutions.
- a tool is provided that allows the planner to navigate within the Pareto optimal space.
- the radiotherapy planning system finds the best trade-off between all target and OAR's dose objectives. If said comparison signal indicates that said solution does not satisfy said clinical goal, said radiotherapy planning system is further configured to provide said solution as a warm start to generate a final auto-generated plan.
- said Pareto frontier navigation unit is configured to determine a convex hull piecewise linear approximation of a Pareto front.
- v is the vector of convex combination weights for each navigated solution in Y c
- x k refers to an auto-generated plan
- k 1,..., N + 2
- f is a vector-valued function, where each component is one of N dose quality metrics.
- said weight adjustment unit comprises a graphical user interface, where, for each respective weight from said plurality of weights, a slider is provided to adjust said respective weight.
- said radiotherapy planning system in response to receiving a user interaction with a slider, is configured to optimize an inner linear programming problem based on the adjusted weight.
- the preferred embodiment moves towards the next best convex combination of Pareto solutions which satisfy the new/current sliders positions.
- said graphical user interface is further configured to update and display respective dose maps and dose volume histograms.
- said graphical user interface is further configured to update and display respective dose maps and dose volume histograms.
- said radiotherapy planning system is configured to compare said solution to a clinical goal and wherein said radiotherapy planning system is further configured to generate a comparison signal indicative of whether or not the said solution satisfies said clinical goal.
- the radiotherapy planning system according to the present invention may assist in deciding whether the present solution already provides a satisfactory treatment plan so that the iterative planning procedure may be stopped.
- the radiotherapy planning system according to the present invention enables the user to decide upon being queried whether to continue or not.
- a user may set the preference to automatically stop the treatment planning procedure once a satisfactory solution (i.e., a solution satisfying one or more clinical goals) is found.
- said radiotherapy planning system is further configured to deliver the said solution to a radiation therapy system. If a current solution satisfies one or more clinical goals, the iterative treatment planning procedure may be stopped, because a satisfactory solution has been found. Radiation therapy may then commence right away or after a certain time period. In any case, it is preferable to transmit the determined solution to a radiation therapy system in order to have the treatment plan ready to be used.
- said radiotherapy planning system is configured to employ a Pareto-front based refinement technique.
- a Pareto-front based refinement technique By employing a Pareto-front based refinement technique, the radiotherapy planning system according to the preferred embodiment avoids an additional lengthy manual parameter tweaking to refine the auto-generated solution. Thereby, the radiotherapy planning system according to the preferred embodiment increases planner control on the auto-generated plan refinement process.
- said radiotherapy planning system is configured to determine a set of treatment plans which sample a Pareto frontier. By determining a set of treatment plans which sample a Pareto frontier, fast and interactive browsing through various treatment options is possible.
- said radiotherapy planning system is configured to determine a set of N+2 treatment plans, wherein N corresponds to the number of dose quality metrics, wherein said radiotherapy planning system is configured to determine N anchor treatment plans by optimizing each dose quality metric individually, and wherein said radiotherapy planning system is further configured to determine one additional balance treatment plan by using the same weight for each dose quality metric.
- said radiotherapy planning system is configured to build an approximated Pareto front by generating convex linear combinations of said one or more auto-planned treatment plans.
- the radiotherapy planning system achieves that the subsequent solution search (i.e., Pareto navigation) will be bounded to a local neighborhood of the auto-planned solutions.
- said radiotherapy planning system is configured to normalize each of said one or more dose quality metrics.
- a radiotherapy planning method for determining a solution corresponding to a fluence profile, the radiotherapy planning method comprising the steps of generating one or more auto-planned treatment plans based on one or more dose quality metrics; assigning a predetermined plurality of weights to said one or more dose quality metrics; adjusting a selected weight from said plurality of weights; generating said solution corresponding to said fluence profile in response to said adjusted selected weight by using a Pareto frontier navigation unit; comparing said solution to a clinical goal; and generating a comparison signal indicative of whether or not said solution satisfies said clinical goal, wherein, if said comparison signal indicates that said solution does not satisfy said clinical goal, said solution is provided as a warm start to generate a final auto-generated plan.
- a computer readable storage medium encoded with one or more computer executable instructions, which, when executed by a processor of a computing system causes the processor to carry out the steps of the radiotherapy planning method defined by claim 12.
- radiotherapy planning system of claim 1 the radiotherapy planning method of claim 12, and the computer readable storage medium of claim 13 have similar and/or identical preferred embodiments, in particular, as defined in the dependent claims.
- Radiotherapy planning system 100 comprises an auto-planned solution generation unit 110 for automatically generating one or more auto-planned treatment plans 111 based on one or more dose quality metrics 112; a weight assignment unit 120 configured to assign a predetermined plurality of weights 121 to said one or more dose quality metrics 112; a weight adjustment unit 130 configured to adjust a selected weight 121a from said plurality of weights 121; and a Pareto frontier navigation unit 140 configured to generate said solution 101 corresponding to said fluence profile in response to said adjusted selected weight 121a.
- Fig. 2 shows schematically and exemplarily another embodiment of a radio-therapy planning method 200 for determining a solution 101 corresponding to a fluence profile
- the radiotherapy planning method 200 comprising the steps of generating (step 210) one or more auto-planned treatment plans 111 based on one or more dose quality metrics 112; assigning (step 220) a predetermined plurality of weights 121 to said one or more dose quality metrics 112; adjusting (step 230) a selected weight 121a from said plurality of weights 121; and generating (step 240) said solution 101 corresponding to said fluence profile in response to said adjusted selected weight 121a.
- Fig. 3 shows schematically and exemplarily an illustration 300 of a three dimensional Pareto surface as described, e.g., in the article " Deliverable navigation for multicriteria step and shoot IMRT treatment planning", Phys. Med. Biol. (2013), Vol. 58, pp. 87-103, by D. Craft and C. Richter .
- Auto-generated treatment plans are indicated by bold black dots. Convex combinations of those auto-generated treatment plans correspond to the triangles formed by respective three solution points. The mentioned convex combinations of auto-generated solutions approximate a three-dimensional Pareto surface. Further details are described in the above-mentioned article by Craft and Richter.
- a potential solution (such as, e.g., a set of fluence beam profiles) may be determined, e.g., by using the Auto-planning Pinnacle 3 tool, as described in the article " MO-D-BRB-07: Automated IMRT Plan Generation for Prostate Cancer", Med. Phys. (2010), Vol. 37, pp. 3340-3340 by R. Kashani et al.. If the auto-generated solution already satisfies all clinical wishes, then the plan can be readily delivered. If however due to different causes, the new dose distribution is not accurate enough, an additional lengthy manual parameter tweaking is needed to refine the auto-generated solution.
- Fig. 4 shows schematically and exemplarily a screenshot 400 of an auto-planning tool to be used, e.g., with the Philips Pinnacle 3 treatment planning system.
- Target optimization goals are shown in panel 420.
- OAR optimization goals are shown in panel 430.
- Said auto-planning routines rely on machine-readable instructions herein referred to as Pinnacle 'scripts'.
- Pinnacle scripts correspond to assemblies of internal commands. Preferably, scripts can be called at any time on new patient files.
- the auto-planning routine When invoked on a new patient, the auto-planning routine creates various target and normal tissue planning structures, sets the beams and dose prescription, and loads customized intensity modulated radiation therapy objectives to start the optimization.
- the target objectives are typically based on a given prescription dose, while organ at risk objectives are determined from a model that takes into account geometric properties of the target and organs at risk to predict mean doses based on prior cases.
- the auto-planning solutions could require more frequent intercession during optimization due to the model's occasional overemphasize of organs at risk sparing.
- This iterative manual refinement process can be very long and is not real-time interactive. In some complex clinical sites, it could take up to several hours to find the best solution, hampering the benefits of auto-planning on large efficiency gains and robust quality control of the clinical RTP process.
- a first 'auto-generated' solution is produced, e.g., by using the Pinnacle 3 Auto-planning tool. Then, the planner may choose to accept and deliver this solution (i.e., beam fluence profiles) or to refine it.
- the present invention can be used to make the refinement step easier and faster.
- f is a vector-valued function, where each component is one of the N dose quality metrics (refinement sliders) discussed at step 0.
- v is the vector of convex combination weights for each navigated solution in Y c .
- the initial v ini values will be the ones related to the plan optimized at step 0, i.e. the plan the planner is willing to further refine.
- the slider's position f ( x* ) can be de-normalized back to the initial ranges before displaying it on the GUI.
- a Pareto frontier navigator in case the optimal auto-generated solution determined at the zero-th step is not accurate enough, it is proposed to use a Pareto frontier navigator, as described in the article " Deliverable navigation for multicriteria step and shoot IMRT treatment planning", Phys. Med. Biol. (2013), Vol. 58, pp. 87-103, by D. Craft and C. Richter .
- the aim is to find the best final plan within a local neighborhood of a limited set of auto-planned solutions x k , where a "solution" corresponds to a specific fluence beam profile.
- the first step in Pareto navigation thus corresponds to determining a set of plans, which accurately sample the Pareto frontier.
- Pareto database plans This set of plans shall be referred to as Pareto database plans.
- the subsequent solution search i.e., Pareto navigation
- a real-time interactive Pareto navigator as described in the above-mentioned article " Deliverable navigation for multicriteria step and shoot IMRT treatment planning", Phys. Med. Biol. (2013), Vol. 58, pp. 87-103, by D. Craft and C. Richter , can be deployed to increase planner control on the auto-generated plan refinement process.
- a set of plans are generated via auto-planning using different combinations of the auto-planning settings' slider positions. For example, one idea could be to determine N plans, which shall be referred to as “anchor plans", by optimizing each k -th quality metric. In other words, one plan for each quality metric is optimized individually.
- the slider position of one metric is set to its maximum value, while all other sliders are set to the minimum. Then, the sliders' positions are used, e.g., by the Pinnacle 3 Auto-planning tool, to obtain one auto-generated solution. This solution is collected in the Pareto matrix Y.
- One additional “balance” plan is optimized using the same weight for each quality metric.
- the name “balance plan” has been chosen to reflect that all weights are the same, i.e., all tuning parameters are equally important.
- the initial set of refined auto-planned solutions can be used to approximate and navigate the Pareto solution space.
- f is a vector-valued function, where each component is one of the N dose quality metrics (refinement sliders) discussed at the zero-th step described above. If one of the N + 2 anchor plans is already satisfying all clinical goals, the solution is kept and delivered to the patient. If this is not the case, an interactive real-time Pareto navigator is applied to move to a better solution point.
- Fig. 5 shows schematically and exemplarily a screenshot of a Pareto navigator tool.
- Current plots of dose distribution 510 and the corresponding dose-volume-histograms 520 are displayed.
- Pareto navigation sliders 530a, ..., 530e are depicted.
- dose distribution 510 and the corresponding dose-volume-histograms 520 are updated in real-time with an update time of approximately one second or less.
- a second step corresponds to providing a tool that allows the planner to navigate within the Pareto optimal space in order to find the best trade-off between all target and organ at risk's dose objectives.
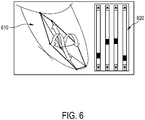
- the planner with a simple and interactive graphical user interface, where for at least one (preferably for each) of the tuning parameters a slider is provided to increase/decrease its importance, as illustrated in Fig. 6 .
- Fig. 6 shows schematically and exemplarily an illustration of a Pareto navigator tool slider movement.
- a linear programming problem is solved to move from the reference point towards a new point on the approximated local Pareto front.
- the term "slider” is generally used in computing to refer to a Graphical User Interface element used to set a value by moving an indicator, e.g., in a horizontal or vertical fashion.
- the tuning parameter's weight in a linear approximation problem is increased or decreased.
- this action invokes the optimization of an inner linear programming problem, which aims to "move" towards the next best convex combination of Pareto solutions which satisfy the new sliders positions. Accordingly, the user is given a real-time feedback about the quality of the new position at current sliders positions.
- the present invention however also covers solutions using triggers to update less frequently, although linear programming optimization is very fast so that always updating is not an issue.
- the corresponding dose map and dose volume histograms are preferably continuously updated and plotted (where the update time is, e.g., less than 1 s).
- v is the vector of convex combination weights for each navigated solution in Y c .
- the convex hull or convex envelope of a set X of points in Euclidean space is the smallest convex set that contains X.
- the convex hull may be visualized as the shape formed by a rubber band stretched around X , see the textbook " Computational Geometry: Algorithms and Applications ", Springer, pp. 2-8, 2000, by de Berg, M.; van Kreveld, M.; Overmars, Mark; Schwarzkopf, O .
- the convex hull may be defined as the intersection of all convex sets containing X or as the set of all convex combinations of points in X.
- convex hulls may be extended from Euclidean spaces to arbitrary real vector spaces; they may also be generalized further, to oriented matroids, see the textbook “ Axioms and hulls ", Lecture Notes in Computer Science no. 606, Heidelberg: Springer-Verlag, p. ix+109, doi:10.1007/3-540-55611-7, ISBN 3-540-55611-7, MR 1226891, 1992, by Knuth, Donald E .
- v * arg min z ⁇ R
- j is the index of the moved slider
- ⁇ is the slider selected value
- ⁇ : ⁇ 1,...
- N ⁇ is the set of sliders indices
- s are slack variables, i.e. variables that are added to an inequality constraint to transform it to an equality, see the book " Convex Optimization ", Cambridge University Press. ISBN 978-0-521-83378-3, 2004, by Boyd, Stephen P.; Vandenberghe, Lieven .
- the reference point y R represents a vector with N entries corresponding to the sliders' positions before the j -th slider was moved.
- the ⁇ value is enforced for the j -th metric and one looks for the best distance to the previous sliders positions in the remaining quality criteria.
- Corresponding dose map and dose volume histograms can also be computed and displayed preferably continuously (with a preferred update time of less than one second), as described in the above-mentioned article " Pareto navigation-algorithmic foundation of interactive multi-criteria IMRTplanning", Phys. Med. Biol. (2008), Vol. 53, pp. 985-998, by M. Monz et al.
- An example of a navigator graphical user interface is shown in Fig. 5 .
- the Pareto approximation may be used as warm start to generate a final auto-generated plan.
- the Pareto navigated solution x* i.e., the beam profile
- the Pareto navigated solution x* could be further processed by a traditional IMRT fluence map optimization tool (available in all radiation therapy planning tools, such as, e.g., the Pinnacle 3).
- the proposed invention can be applied to all clinical cases where a conventional treatment planning system employing only auto-planning fails to produce IMRT plans which meet the required quality. Large efficiency gains, real-time interaction and robust quality control on the clinical IMRT planning process would appear possible by extending treatment planning systems with such a Pareto navigator tool.
- a single unit or device may fulfill the functions of several items recited in the claims.
- the mere fact that certain measures are recited in mutually different dependent claims does not indicate that a combination of these measures cannot be used to advantage.
- Determinations like determining a convex hull piecewise linear approximation of a Pareto front, determining a set of treatment plans which sample a Pareto frontier, determining a set of N+1 treatment plans, determining N anchor treatment plans, determining one additional balance treatment plan, et cetera performed by one or several units or devices can be performed by any other number of units or devices.
- the determination of a convex hull piecewise linear approximation of a Pareto front can be performed by a single unit or by any other number of different units.
- the control of the radiotherapy planning system in accordance with the above described radio-therapy planning method can be implemented as program code means of a computer program and/or as dedicated hardware.
- a computer program may be stored/distributed on a suitable medium, such as an optical storage medium or a solid-state medium, supplied together with or as part of other hardware, but may also be distributed in other forms, such as via the Internet or other wired or wireless telecommunication systems.
- a suitable medium such as an optical storage medium or a solid-state medium, supplied together with or as part of other hardware, but may also be distributed in other forms, such as via the Internet or other wired or wireless telecommunication systems.
- the present invention relates to a radiotherapy planning system for determining a solution corresponding to a fluence profile.
- the invention proposes to use a Pareto frontier navigator to select the best plan from a set of various auto-planned solutions.
- An interactive graphical user interface is provided to the planner to navigate among convex combinations of auto-planned solutions.
- This proposed Pareto plan navigation can be considered as a further optional refinement process, which can be applied to find the best plan in those cases where auto-generated solutions are not fully satisfying the planner's requirements.
- the navigation tool moves locally through a set of auto-generated plans and can potentially simplify the planner's decision making process and reduce the whole planning time on complex clinical cases from several hours to minutes.
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Life Sciences & Earth Sciences (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Animal Behavior & Ethology (AREA)
- Veterinary Medicine (AREA)
- Physics & Mathematics (AREA)
- Epidemiology (AREA)
- Medical Informatics (AREA)
- Primary Health Care (AREA)
- Biophysics (AREA)
- Theoretical Computer Science (AREA)
- Surgery (AREA)
- Urology & Nephrology (AREA)
- Business, Economics & Management (AREA)
- General Business, Economics & Management (AREA)
- Artificial Intelligence (AREA)
- Molecular Biology (AREA)
- Genetics & Genomics (AREA)
- Bioinformatics & Computational Biology (AREA)
- Computational Linguistics (AREA)
- Data Mining & Analysis (AREA)
- Evolutionary Computation (AREA)
- Evolutionary Biology (AREA)
- Computing Systems (AREA)
- General Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Software Systems (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Radiation-Therapy Devices (AREA)
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP14174905 | 2014-06-30 | ||
| PCT/EP2015/064328 WO2016001046A1 (en) | 2014-06-30 | 2015-06-25 | Radiotherapy planning system and method |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3160586A1 EP3160586A1 (en) | 2017-05-03 |
| EP3160586B1 true EP3160586B1 (en) | 2018-10-10 |
Family
ID=51176105
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP15732217.3A Active EP3160586B1 (en) | 2014-06-30 | 2015-06-25 | Radiotherapy planning system and method |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10441811B2 (enExample) |
| EP (1) | EP3160586B1 (enExample) |
| JP (2) | JP6858018B2 (enExample) |
| CN (1) | CN106471507B (enExample) |
| WO (1) | WO2016001046A1 (enExample) |
Families Citing this family (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6858018B2 (ja) * | 2014-06-30 | 2021-04-14 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 放射線治療計画システム及び方法 |
| KR101639369B1 (ko) * | 2014-10-22 | 2016-07-13 | 사회복지법인 삼성생명공익재단 | 방사선 치료기의 정도 관리 시스템 및 방법 |
| US10252081B2 (en) * | 2015-09-25 | 2019-04-09 | Varian Medical Systems International Ag | Apparatus and method using automatic generation of a base dose |
| JP6889495B2 (ja) | 2016-03-09 | 2021-06-18 | リフレクション メディカル, インコーポレイテッド | 放射線療法のためのフルエンスマップ生成方法 |
| US10850120B2 (en) | 2016-12-27 | 2020-12-01 | Varian Medical Systems International Ag | Selecting a dose prediction model based on clinical goals |
| US10512790B2 (en) | 2017-01-11 | 2019-12-24 | Varian Medical Systems International Ag. | Systems and methods for generating radiation treatment plans |
| US10188873B2 (en) * | 2017-03-22 | 2019-01-29 | Varian Medical Systems International Ag | Systems and methods for dose calculation in generating radiation treatment plans |
| US10744343B2 (en) * | 2017-04-28 | 2020-08-18 | Elekta Instrument Ab | Convex inverse planning method |
| CN108057177A (zh) * | 2017-12-11 | 2018-05-22 | 太原工业学院 | 一种基于模糊推理的混合准则放疗参数自动优化方法 |
| EP3581241B1 (en) * | 2018-06-12 | 2022-09-28 | RaySearch Laboratories AB | A method, a user interface, a computer program product and a computer system for optimizing a radiation therapy treatment plan |
| US10912949B2 (en) * | 2018-09-28 | 2021-02-09 | Varian Medical Systems, Inc. | Multi-criteria optimization tools including time-based criteria for radiation therapy |
| EP3920830A1 (en) * | 2019-02-05 | 2021-12-15 | Smith&Nephew, Inc. | Methods for improving robotic surgical systems and devices thereof |
| CN111243758B (zh) * | 2020-01-08 | 2023-06-30 | 杭州费尔斯通科技有限公司 | 一种应用于具有多次反馈调节特点场景的建模方法 |
| US11590362B2 (en) * | 2020-03-26 | 2023-02-28 | Siemens Healthineers International Ag | Radiotherapy treatment planning based on treatment delivery efficiency |
| EP4011442B1 (en) * | 2020-12-09 | 2024-05-08 | RaySearch Laboratories AB | Method and computer program product for dose map prediction for radiotherapy treatment planning |
| CN116940400A (zh) * | 2021-02-24 | 2023-10-24 | 反射医疗公司 | 优化放射疗法的治疗时间和计划质量的方法 |
| DE102021111421A1 (de) | 2021-05-03 | 2022-11-17 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung eingetragener Verein | Verfahren zum Entwerfen oder Gestalten eines verfahrenstechnischen oder chemischen Prozesses und GUI mit dieser Funktion |
| CA3235735A1 (en) * | 2021-09-25 | 2023-03-30 | Michael Bortz | Mco planning of treatments with available technologies in radiotherapy (rt) |
| CN115869550A (zh) * | 2021-09-26 | 2023-03-31 | 西安大医集团股份有限公司 | 剂量控制方法、装置及医疗设备 |
| US11847449B2 (en) | 2021-10-20 | 2023-12-19 | Evernorth Strategic Development, Inc. | Code interdependency analysis system |
| CN119234277A (zh) * | 2022-02-11 | 2024-12-31 | 医科达医疗器械有限公司 | 帕雷托最优放疗计划的探索 |
| US20240100357A1 (en) * | 2022-09-27 | 2024-03-28 | Siemens Healthineers International Ag | Method and apparatus to modify dose values during radiation treatment planning |
| CN120473078A (zh) * | 2025-07-07 | 2025-08-12 | 深圳第一健康医疗管理有限公司 | 家庭智能健康管理系统及其方法 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10151987C2 (de) | 2001-10-22 | 2003-11-06 | Fraunhofer Ges Forschung | Vorbereiten der Auswahl von Steuergrößen für eine zeitlich und räumlich einzustellende Dosisverteilung eines Strahlengerätes |
| US7437336B2 (en) * | 2003-08-01 | 2008-10-14 | George Mason Intellectual Properties, Inc. | Polyoptimizing genetic algorithm for finding multiple solutions to problems |
| EA010207B1 (ru) | 2003-10-07 | 2008-06-30 | Номос Корпорейшн | Система планирования, способ и устройство для конформной радиотерапии |
| US8489366B2 (en) * | 2007-07-30 | 2013-07-16 | The General Hospital Corporation | System and method for radiation dose control |
| US8315357B2 (en) * | 2009-10-08 | 2012-11-20 | The Board Of Trustees Of The Leland Stanford Junior University | Radiation therapy inverse treatment planning using a regularization of sparse segments |
| CN102859527B (zh) * | 2010-02-05 | 2017-03-22 | 皇家飞利浦电子股份有限公司 | 处置计划创建工作流程跟踪 |
| WO2011153639A2 (en) * | 2010-06-07 | 2011-12-15 | The University Of Manitoba | Multi-objective radiation therapy optimization method |
| CN103282967B (zh) * | 2010-08-17 | 2016-07-06 | 德克萨斯州立大学董事会 | 用于放射疗法的自动化治疗计划 |
| US10146393B2 (en) | 2012-05-31 | 2018-12-04 | Varian Medical Systems International Ag | Method and apparatus pertaining to radiation treatment plan optimization states |
| US9943702B2 (en) * | 2012-10-29 | 2018-04-17 | Koninklijke Philips N.V. | Automatic optimal IMRT/VMAT treatment plan generation |
| CN103083820B (zh) * | 2013-01-13 | 2015-05-13 | 中国科学院合肥物质科学研究院 | 一种剂量引导精确放射治疗系统 |
| JP6858018B2 (ja) * | 2014-06-30 | 2021-04-14 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 放射線治療計画システム及び方法 |
-
2015
- 2015-06-25 JP JP2016575420A patent/JP6858018B2/ja not_active Expired - Fee Related
- 2015-06-25 WO PCT/EP2015/064328 patent/WO2016001046A1/en not_active Ceased
- 2015-06-25 CN CN201580035989.2A patent/CN106471507B/zh active Active
- 2015-06-25 EP EP15732217.3A patent/EP3160586B1/en active Active
- 2015-06-25 US US15/314,698 patent/US10441811B2/en active Active
-
2020
- 2020-11-06 JP JP2020185818A patent/JP7132995B2/ja active Active
Non-Patent Citations (1)
| Title |
|---|
| None * |
Also Published As
| Publication number | Publication date |
|---|---|
| US20170189715A1 (en) | 2017-07-06 |
| WO2016001046A1 (en) | 2016-01-07 |
| US10441811B2 (en) | 2019-10-15 |
| JP2021035540A (ja) | 2021-03-04 |
| JP2017520319A (ja) | 2017-07-27 |
| JP7132995B2 (ja) | 2022-09-07 |
| CN106471507B (zh) | 2020-04-14 |
| CN106471507A (zh) | 2017-03-01 |
| EP3160586A1 (en) | 2017-05-03 |
| JP6858018B2 (ja) | 2021-04-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3160586B1 (en) | Radiotherapy planning system and method | |
| EP2983781B1 (en) | Incremental treatment planning | |
| EP3436148B1 (en) | Adaptive radiation therapy planning | |
| EP3347094B1 (en) | Knowledge based multi-criteria optimization for radiotherapy treatment planning | |
| CN107708807B (zh) | 用于放射疗法优化的方法、计算机程序产品和计算机系统 | |
| CN108771794B (zh) | 用于生成辐射处理计划中的剂量计算的系统和方法 | |
| CN113840632B (zh) | 用于放射疗法治疗计划的系统、计算机程序产品和方法 | |
| CN115666718B (zh) | 放射疗法治疗规划 | |
| US20230390585A1 (en) | Methods for optimizing treatment time and plan quality for radiotherapy | |
| CN118942629A (zh) | 剂量分布预测模型的预训练方法、预训练系统、训练方法及训练系统 | |
| US12138480B2 (en) | Radiation therapy treatment planning | |
| US20210023395A1 (en) | Planning system for planning a volumetric modulated arc radiation therapy procedure | |
| EP4389206A1 (en) | Systems and methods for generating plan quality scores to optimize radiotherapy treatment planning | |
| Zarepisheh et al. | Advances in inverse planning algorithm and strategy | |
| US20250345630A1 (en) | Deep learning-based multileaf collimator leaf sequencing for mri-guided online adaptive radiotherapy | |
| EP4389207A1 (en) | Systems and methods for optimizing radiotherapy planning using plan quality scores |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE INTERNATIONAL PUBLICATION HAS BEEN MADE |
|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20170130 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| DAV | Request for validation of the european patent (deleted) | ||
| DAX | Request for extension of the european patent (deleted) | ||
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20180430 |
|
| RIN1 | Information on inventor provided before grant (corrected) |
Inventor name: ISOLA, ALFONSO AGATINO Inventor name: NEUKIRCHEN, CHRISTOPH |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP Ref country code: AT Ref legal event code: REF Ref document number: 1050552 Country of ref document: AT Kind code of ref document: T Effective date: 20181015 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602015017872 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20181010 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 1050552 Country of ref document: AT Kind code of ref document: T Effective date: 20181010 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181010 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181010 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190210 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190110 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181010 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181010 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190110 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181010 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181010 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181010 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181010 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181010 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181010 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181010 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190111 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190210 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602015017872 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181010 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181010 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181010 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181010 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181010 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181010 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181010 |
|
| 26N | No opposition filed |
Effective date: 20190711 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181010 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181010 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20190630 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181010 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190625 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190630 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190630 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190625 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190630 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181010 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181010 Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20150625 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181010 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20220621 Year of fee payment: 8 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20220624 Year of fee payment: 8 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20230625 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230625 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230630 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20250402 Year of fee payment: 11 |