EP3125546B1 - Dispositif de formation d'une image sécurisée d'un objet, installation et procédé associés - Google Patents
Dispositif de formation d'une image sécurisée d'un objet, installation et procédé associés Download PDFInfo
- Publication number
- EP3125546B1 EP3125546B1 EP16182099.8A EP16182099A EP3125546B1 EP 3125546 B1 EP3125546 B1 EP 3125546B1 EP 16182099 A EP16182099 A EP 16182099A EP 3125546 B1 EP3125546 B1 EP 3125546B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- sequence
- image
- images
- pattern
- predefined
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000009434 installation Methods 0.000 title claims description 19
- 238000000034 method Methods 0.000 title description 5
- 230000005540 biological transmission Effects 0.000 claims description 37
- 230000003287 optical effect Effects 0.000 claims description 31
- 230000015572 biosynthetic process Effects 0.000 claims 2
- 230000006835 compression Effects 0.000 description 7
- 238000007906 compression Methods 0.000 description 7
- 238000001514 detection method Methods 0.000 description 4
- 230000001174 ascending effect Effects 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 238000002955 isolation Methods 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 230000001681 protective effect Effects 0.000 description 1
- 230000035484 reaction time Effects 0.000 description 1
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L23/00—Control, warning or like safety means along the route or between vehicles or trains
- B61L23/04—Control, warning or like safety means along the route or between vehicles or trains for monitoring the mechanical state of the route
- B61L23/041—Obstacle detection
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L15/00—Indicators provided on the vehicle or train for signalling purposes
- B61L15/0018—Communication with or on the vehicle or train
- B61L15/0027—Radio-based, e.g. using GSM-R
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L15/00—Indicators provided on the vehicle or train for signalling purposes
- B61L15/009—On-board display devices
Definitions
- Guided vehicles operating automatically are generally equipped with cameras allowing control of the vehicle by an operator located outside the vehicle.
- cameras are arranged to film specific areas such as the lane on which the vehicle is traveling, thus ensuring that no other vehicle is engaged on the path.
- the transmission of video images acquired by cameras is not always reliable due to errors or problems in the transmission. Such errors are, for example, due to a delay in the transmission of video images, erroneous compression of the video images or even to a malfunction of the camera which transmits a series of images that are not updated.
- He is known to WO 2011/144261 a system aimed at securing remote transmission of an image of an object acquired by a camera. To do this, camera identification information or a date stamp is projected into the camera's field of vision.
- the invention relates to an installation for securing a remote transmission of images of an object according to claim 1.
- the installation also comprises one or more of the characteristics of claims 2 to 6 taken in isolation or in all technically possible combinations.
- FIG. 1 An installation 10 for securing a remote transmission of images of an object is illustrated on the figure 1 .
- the installation 10 is configured to secure the remote transmission of a series of images of an object 11.
- object 11 is a railway track.
- Installation 10 is capable of operating in an automated manner.
- the installation 10 comprises a training device 12, a transmission unit 15, an analysis system 16 and a restitution system 18 of the analysis result.
- the installation 10 also includes a display system 20.
- the analysis system 16, the restitution system 18 and the display system 20 are located at a distance from the training device 12. Thus, in the case where the training device 12 is placed in a guided vehicle, the system d The analysis 16, the restitution system 18 and the display system 20 are generally not arranged in this vehicle.
- the training device 12 is installed in a railway vehicle 19.
- the railway vehicle 19 is automatic and controlled at distance.
- the analysis system 16, the restitution system 18 and the display system 20 are arranged outside the vehicle 19.
- the training device 12 comprises a video acquisition system 21, a module 24 for generating a security image, a module 26 for superimposing the security image and optionally a reflector 28.
- the video acquisition system 21 includes an acquisition surface.
- the acquisition surface is a photosensitive receiver, for example a CCD matrix (acronym for Charge-Coupled Device translated into French as Charge Transfer Device ) .
- the video acquisition system 21 is configured to acquire video images formed on its acquisition surface.
- the video acquisition system 21 is, for example, a camera.
- the image of the object 11 is formed on the acquisition surface of the video acquisition system 21.
- the module 24 for generating the security image is, for example, a calculator.
- the security image includes an optical signature.
- optical signature is meant an optical image comprising information suitable for securing the remote transmission of the image of an object.
- secure transmission is meant the error-free transmission with a transmission time less than or equal to 500 milliseconds (ms) of the image acquired by a video acquisition system to a reception system, i.e. that is, the transmission time is less than or equal to twice the reaction time of a driver.
- the optical signature comprises at least two figures comprising at least two zones, preferably at least three zones, advantageously at least four zones.
- each figure preferably have a polygonal shape, advantageously a square, rectangular or trapezoid shape.
- a polygonal shape advantageously a square, rectangular or trapezoid shape.
- Such shapes make it possible, in fact, to facilitate the compression of the optical signature during remote transmission of the optical signature.
- such shapes also facilitate the automatic analysis of the optical signature by the analysis system 16.
- the areas of each figure are preferably identical.
- the generation module 24 is capable of generating a pattern 35 moving over the areas of each figure according to a predefined sequence.
- the predefined sequence for each figure defines the order and duration of presence of the pattern 35 on the areas of the figure.
- pattern 35 is the uniform lighting of a area of each figure.
- the pattern advantageously has a simple polygonal shape, preferably a square or rectangular shape.
- the predefined sequence of movement of the pattern 35 between the zones of each figure is distinct from one figure to another. Such a characteristic makes it possible to increase the probability of detecting transmission errors.
- the optical signature includes four figures A, B, C, D of identical shape.
- the four figures are arranged in distinct corners of the image of the object, thus making it possible to detect non-homogeneous anomalies in the transmission and compression of the images, for example which would only affect a portion of the image.
- each figure A, B, C, D includes four square areas identical to each other.
- the zones are denoted A1, A2, A3, A4 for the first figure A; B1, B2, B3, B4 for the second figure B; C1, C2, C3, C4 for the third figure C; D1, D2, D3, D4 for the fourth figure D.
- the predefined sequence for each figure defines an order and a time of presence of the pattern 35, here the lighting of a zone, on the zones of the figure.
- the zones of each figure are illuminated in ascending order of the zone index starting with zone A1 for figure A, zone B2 for figure B, zone C3 for figure C and zone D4 for figure D.
- the presence time of the pattern 35 on each zone of each figure A, B, C, D is, for example, equal to 0.5 second (s).
- the presence time of the pattern 35 is different depending on the area of each figure. This makes it possible, for example, to distinguish each camera and therefore each train.
- the superposition module 26 comprises a light projector capable of projecting the security image onto the reflector 28 located in the field of the video acquisition system 21.
- the light projector is capable of generating a laser beam, preferably monochromatic so as to facilitate the detection and analysis of the security image, or a backlit image.
- a backlit image is an image lit from behind.
- the superposition module 26 is capable of superimposing, on the acquisition surface, via the reflector 28, the security image on the image of the object 11 to form a secure image of the object 11.
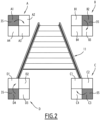
- the figure 2 represents a secure image resulting from the superposition of an image of the object 11, here a railway track, with the security image comprising the optical signature formed in Figures A, B, C and D.
- the reflector 28 is chosen from the group consisting of: a semi-transparent plate located between the video acquisition system 21 and the object 11, a transparent plate located between the video acquisition system 21 and the object 11, the transparent plate comprising a frosted area at the location of the projection of the optical signature of the security image and a windshield of a vehicle in which the training device 12 is suitable for being installed.
- the reflector 28 is the windshield of the railway vehicle 19 in which the device 12 is arranged.
- the reflector 28 is, for example, the protective glass of the video acquisition system 21.
- the projector of the superposition module 26 is capable of projecting directly, without the intermediary of the reflector 28, the security image onto the acquisition surface of the video acquisition system 21.
- the transmission unit 15 is configured to transmit to the analysis system 16, the successive images acquired by the video acquisition system 21, these successive images resulting from the superposition, at different times, on the acquisition surface, of the image of object 11 and the security image.
- the successive images acquired by the acquisition system 21 form a sequence of secure images.
- the transmission unit 15 is, for example, an antenna.
- the analysis system 16 is configured to analyze the conformity of the movement sequence of the pattern 35 on the zones of each figure of the sequence of images transmitted with the predefined sequence for each figure.
- the analysis system 16 comprises a reception unit 36 capable of receiving the sequence of images transmitted by the transmission unit 15.
- the analysis system 16 comprises an analysis unit 38 of the optical signature of the sequence of images transmitted.
- the analysis unit 38 comprises a memory 39 in which the predefined sequence is recorded.
- the reception unit 36 is, for example, an antenna.
- the analysis unit 38 is capable of analyzing the conformity of the optical signature of the sequence of images transmitted by convolution of the figures of the sequence of images transmitted with a set of predefined models for each figure.
- the set of predefined models for each figure brings together all the possible positions of the pattern 35 on the areas of the figure during the predefined sequence.
- the set of models is therefore predefined, for each figure, according to the predefined sequence of movement of the pattern 35 on the areas of the figure.
- all predefined templates includes four figure templates, each having an area containing the pattern that differs from one figure template to another.
- the analysis unit 38 is thus capable of determining the order and duration of presence of the pattern 35 on the areas of each figure of the transmitted image sequence.
- the analysis unit 38 is then configured to compare the movement sequence of the pattern 35 determined with respect to the predefined sequence recorded in the memory 39.
- the optical signature is said to conform to the transmitted sequence of images and the transmission is considered secure.
- the sequence of images transmitted is compliant when the movement of the pattern 35 reproduces the predefined sequence for a certain number of figures but not necessarily for all of the figures, for example example only for 75 percent (%) of the figures.
- the restitution system 18 is capable of communicating the result of the analysis carried out by the analysis system 16.
- the restitution system 18 is, for example, configured to generate an alert when the optical signature of the sequence of images transmitted does not conform.
- the restitution system 18 is also capable of ordering the immediate stopping of the vehicle 19 by any existing means.
- the display system 20 is able to display the sequence of images transmitted with possibly an indicator of the conformity of the optical signature of the sequence of images transmitted.
- the display system 20 uses any existing means, for example a cross crossing out the display, a black display, a red frame, a red translucent filter, to indicate to the operator that the display is no longer secure.
- the operator can choose to display or hide the area of the screen containing the optical signature.
- the display system 20 is, for example, a screen.
- the security process is implemented automatically by the systems, units and devices of the installation 10.
- the video acquisition system 21 forms the image of the object 11 on its acquisition surface.
- the generation module 24 of the training device 12 generates the security image comprising the optical signature.
- the superposition module 26 projects the generated security image onto the reflector 28.
- the superposition module 26 superimposes, on the acquisition surface, via the reflector 28, the security image on the image of the object to form a secure image of the object.
- Object 11 the superposition module 26 superimposes, on the acquisition surface, via the reflector 28, the security image on the image of the object to form a secure image of the object.
- the video acquisition system 21 acquires a series of secure images formed successively by repetition of the previous steps.
- the secure image sequence is transmitted continuously to the analysis system 16 via the transmission unit 15.
- the reception unit 36 of the analysis system 16 successively receives the images of the transmitted image sequence.
- the analysis unit 38 of the analysis system 16 analyzes the conformity of the optical signature of the transmitted image sequence. For this, the analysis unit 38 carries out, for example, the convolution of each figure of the sequence of images transmitted with the predefined models for each figure and compares the determined sequence of movement of the pattern 35 on the areas of each figure with the predefined sequence for the figure.
- the restitution system 18 communicates during a following step 150, the results of the analysis carried out by the analysis system 16. For this, the restitution system 18 generates, for example, an alert or an emergency stop of the vehicle 19 when the optical signature of the transmitted image sequence is judged to be non-compliant.
- the display system 20 successively displays the images of the transmitted image sequence.
- the transmitted image sequence is displayed only when it is said to be compliant.
- the specific shape of the optical signature makes it possible to obtain a dynamic optical signature with the same pattern 35 moving in a known sequence. This facilitates the compression and analysis of the optical signature and thereby the detection of non-compliant images.
- the polygonal shape of the areas of the figure facilitates the compression of the security image and therefore its transmission.
- the bandwidth used for the transmission of the sequence of secure images is further minimized.
- the redundancy of the figures makes it possible to improve the resistance to video transmission errors in the tunnel and to cover the risk of confusion of the sequence of images acquired in real time with a sequence of images previously stored in the camera.
- Timing of the sequence makes it possible to detect a possible slow drift in the video transmission time by continuously analyzing the history of timings measured at reception.
- such a security system is capable of defining a safety integrity level SIL 2 (acronym for “Safety Integrated Level”) or SIL 3, a safety integrity level being a relative level of reduction of risks inherent to a security function.
- SIL 2 ancronym for “Safety Integrated Level”
- SIL 3 a safety integrity level being a relative level of reduction of risks inherent to a security function.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Closed-Circuit Television Systems (AREA)
Description
- La présente invention concerne une installation de sécurisation d'une transmission à distance d'images d'un objet comprenant un dispositif de formation d'une image sécurisée d'un objet, le dispositif comprenant :
- un système d'acquisition vidéo comprenant une surface d'acquisition, l'image de l'objet étant formée sur la surface d'acquisition,
- un module de génération d'une image de sécurisation, l'image de sécurisation comprenant une signature optique, et
- un module de superposition de l'image de sécurisation sur l'image de l'objet, formée sur la surface d'acquisition, pour former une image sécurisée de l'objet sur la surface d'acquisition.
- Les véhicules guidés fonctionnant de manière automatique sont généralement équipés de caméras permettant d'assurer un contrôle du véhicule par un opérateur situé à l'extérieur du véhicule.
- Par exemple, dans les transports en commun automatisés, tels que le métro automatisé, des caméras sont agencées pour filmer des zones spécifiques telle que la voie sur laquelle est engagé le véhicule, permettant ainsi de s'assurer qu'aucun autre véhicule n'est engagé sur la voie.
- Cependant, la transmission des images vidéo acquises par les caméras n'est pas toujours fiable du fait d'erreurs ou de problèmes dans la transmission. De telles erreurs sont, par exemple, dues à un retard dans la transmission des images vidéo, une compression erronée des images vidéo ou encore à un disfonctionnement de la caméra qui transmet une suite d'images non mise à jour.
- Il est connu de
WO 2011/144261 un système visant à sécuriser une transmission à distance d'une image d'un objet acquise par une caméra. Pour cela, une information d'identification de la caméra ou un datage est projeté dans le champ de vision de la caméra. - Cependant, la compression, en vue de sa transmission à distance, d'une image comprenant une information d'identification quelconque ou un datage n'est pas optimale et s'avère consommatrice en bande passante.
-
WO 02/28110 A EP 2 147 844 etDE 100 06 091 concernent encore d'autres systèmes visant à sécuriser une transmission à distance d'une image d'un objet acquise par une caméra. - Il existe donc un besoin pour optimiser la compression d'une image transmise à distance tout en facilitant l'analyse de la fiabilité de la transmission à distance.
- L'invention concerne une installation de sécurisation d'une transmission à distance d'images d'un objet selon la revendication 1.
- Suivant d'autres aspects avantageux de l'invention, l'installation comprend également l'une ou plusieurs des caractéristiques des revendications 2 à 6 prises isolément ou suivant toutes les combinaisons techniquement possibles.
- D'autres caractéristiques et avantages de l'invention apparaîtront à la lecture de la description qui suit des modes de réalisation de l'invention, donnée à titre d'exemple uniquement et en référence aux dessins qui sont :
-
figure 1 , une vue schématique d'une installation selon l'invention de sécurisation d'une transmission à distance d'images d'un objet, -
figure 2 , une vue schématique d'une image sécurisée selon l'invention obtenue par superposition d'une image d'un objet et d'une image de sécurisation sur la surface d'acquisition d'un système d'acquisition vidéo, et -
figure 3 , un organigramme d'un procédé de sécurisation selon l'invention d'une transmission à distance d'images d'un objet. - Une installation 10 de sécurisation d'une transmission à distance d'images d'un objet est illustrée sur la
figure 1 . - L'installation 10 est configurée pour sécuriser la transmission à distance d'une suite d'images d'un objet 11. Dans l'exemple illustré sur la
figure 1 , l'objet 11 est une voie de chemin de fer. - L'installation 10 est propre à fonctionner de manière automatisée.
- L'installation 10 comprend un dispositif de formation 12, une unité de transmission 15, un système d'analyse 16 et un système de restitution 18 du résultat de l'analyse. Avantageusement, l'installation 10 comprend également un système d'affichage 20.
- Le système d'analyse 16, le système de restitution 18 et le système d'affichage 20 sont situés à distance du dispositif de formation 12. Ainsi, dans le cas où le dispositif de formation 12 est disposé dans un véhicule guidé, le système d'analyse 16, le système de restitution 18 et le système d'affichage 20 ne sont généralement pas disposés dans ce véhicule.
- Dans l'exemple illustré sur la
figure 1 , le dispositif de formation 12 est installé dans un véhicule ferroviaire 19. Le véhicule ferroviaire 19 est automatique et contrôlé à distance. Dans cet exemple, le système d'analyse 16, le système de restitution 18 et le système d'affichage 20 sont disposés à l'extérieur du véhicule 19. - Le dispositif de formation 12 comprend un système d'acquisition vidéo 21, un module 24 de génération d'une image de sécurisation, un module 26 de superposition de l'image de sécurisation et optionnellement un réflecteur 28.
- Le système d'acquisition vidéo 21 comprend une surface d'acquisition. La surface d'acquisition est un récepteur photosensible, par exemple une matrice CCD (acronyme de l'anglais Charge-Coupled Device traduit en français par Dispositif à transfert de charge).
- Le système d'acquisition vidéo 21 est configuré pour acquérir des images vidéo formées sur sa surface d'acquisition. Le système d'acquisition vidéo 21 est, par exemple, une caméra.
- L'image de l'objet 11 est formée sur la surface d'acquisition du système d'acquisition vidéo 21.
- Le module 24 de génération de l'image de sécurisation est, par exemple, un calculateur.
- L'image de sécurisation comprend une signature optique. Il est entendu par l'expression « signature optique », une image optique comprenant des informations propres à sécuriser la transmission à distance de l'image d'un objet. Il est entendu par l'expression « transmission sécurisée », la transmission sans erreur avec un temps de transmission inférieur ou égal à 500 millisecondes (ms) de l'image acquise par un système d'acquisition vidéo vers un système de réception, c'est-à-dire que le temps de transmission est inférieur ou égal à deux fois le temps de réaction d'un conducteur.
- La signature optique comprend au moins deux figures comportant au moins deux zones, de préférence au moins trois zones, avantageusement au moins quatre zones.
- Les zones de chaque figure ont de préférence une forme polygonale, avantageusement une forme carrée, rectangulaire ou trapézoïde. De telles formes permettent, en effet, de faciliter la compression de la signature optique lors de la transmission à distance de la signature optique. En outre, de telles formes facilitent également l'analyse automatique de la signature optique par le système d'analyse 16.
- Les zones de chaque figure sont de préférence identiques.
- En variante, la taille et la forme des zones de chaque figure varient.
- Le module de génération 24 est propre à générer un motif 35 se déplaçant sur les zones de chaque figure selon une séquence prédéfinie. La séquence prédéfinie pour chaque figure définit l'ordre et la durée de présence du motif 35 sur les zones de la figure. Dans l'exemple illustré sur la
figure 2 , le motif 35 est l'éclairage uniforme d'une zone de chaque figure. Le motif a avantageusement une forme polygonale simple, de préférence une forme carrée ou rectangulaire. - Lorsque la signature optique comprend au moins deux figures, la séquence prédéfinie de déplacement du motif 35 entre les zones de chaque figure est distincte d'une figure à l'autre. Une telle caractéristique permet d'augmenter la probabilité de détecter des erreurs de transmission.
- Dans l'exemple illustré sur la
figure 2 , la signature optique comprend quatre figures A, B, C, D de forme identique. Les quatre figures sont disposées dans des coins distincts de l'image de l'objet permettant ainsi de détecter des anomalies non homogènes dans la transmission et la compression des images, par exemple qui affecteraient seulement une portion de l'image. - Dans l'exemple de la
figure 2 , chaque figure A, B, C, D comprend quatre zones carrées identiques les unes aux autres. Les zones sont notées A1, A2, A3, A4 pour la première figure A ; B1, B2, B3, B4 pour la deuxième figure B ; C1, C2, C3, C4 pour la troisième figure C ; D1, D2, D3, D4 pour la quatrième figure D. - La séquence prédéfinie pour chaque figure définit un ordre et un temps de présence du motif 35, ici l'éclairage d'une zone, sur les zones de la figure. Dans cet exemple, les zones de chaque figure sont éclairées par ordre croissant de l'indice de la zone en commençant par la zone A1 pour la figure A, la zone B2 pour la figure B, la zone C3 pour la figure C et la zone D4 pour la figure D. Le temps de présence du motif 35 sur chaque zone de chaque figure A, B, C, D est, par exemple, égal à 0,5 seconde (s).
- En variante, le temps de présence du motif 35 est différent en fonction de la zone de chaque figure. Cela permet par exemple de distinguer chaque caméra et par conséquent chaque train.
- Le module de superposition 26 comprend un projecteur lumineux propre à projeter l'image de sécurisation sur le réflecteur 28 situé dans le champ du système d'acquisition vidéo 21. Le projecteur lumineux est propre à générer un faisceau laser, de préférence monochromatique de sorte à faciliter la détection et l'analyse de l'image de sécurisation, ou une image rétro-éclairée. Une image rétro-éclairée est une image éclairée par l'arrière.
- Le module de superposition 26 est propre à superposer, sur la surface d'acquisition, par l'intermédiaire du réflecteur 28, l'image de sécurisation à l'image de l'objet 11 pour former une image sécurisée de l'objet 11. Ainsi, la
figure 2 représente une image sécurisée résultant de la superposition d'une image de l'objet 11, ici une voie ferrée, avec l'image de sécurisation comprenant la signature optique formée des figures A, B, C et D. - Le réflecteur 28 est choisi parmi le groupe consistant en : une plaque semi-transparente située entre le système d'acquisition vidéo 21 et l'objet 11, une plaque transparente située entre le système d'acquisition vidéo 21 et l'objet 11, la plaque transparente comportant une zone dépolie à l'emplacement de la projection de la signature optique de l'image de sécurisation et un pare-brise d'un véhicule dans lequel le dispositif de formation 12 est propre à être installé.
- Dans l'exemple de la
figure 1 , le réflecteur 28 est le pare-brise du véhicule ferroviaire 19 dans lequel est disposé le dispositif 12. Dans le cas où le dispositif 12 est intégré, par exemple à l'avant du véhicule 19, le réflecteur 28 est, par exemple, la vitre de protection du système d'acquisition vidéo 21. - En variante, le projecteur du module de superposition 26 est propre à projeter directement, sans l'intermédiaire du réflecteur 28, l'image de sécurisation sur la surface d'acquisition du système d'acquisition vidéo 21.
- L'unité de transmission 15 est configurée pour transmettre au système d'analyse 16, les images successives acquises par le système d'acquisition vidéo 21, ces images successives résultant de la superposition, à différents instants, sur la surface d'acquisition, de l'image de l'objet 11 et de l'image de sécurisation. Les images successives acquises par le système d'acquisition 21 forment une suite d'images sécurisées.
- L'unité de transmission 15 est, par exemple, une antenne.
- Le système d'analyse 16 est configuré pour analyser la conformité de la séquence de déplacement du motif 35 sur les zones de chaque figure de la suite d'images transmise avec la séquence prédéfinie pour chaque figure.
- Le système d'analyse 16 comprend une unité de réception 36 propre à réceptionner la suite d'images transmise par l'unité de transmission 15. En outre, le système d'analyse 16 comprend une unité d'analyse 38 de la signature optique de la suite d'images transmise. L'unité d'analyse 38 comprend une mémoire 39 dans laquelle est enregistrée la séquence prédéfinie.
- L'unité de réception 36 est, par exemple, une antenne.
- L'unité d'analyse 38 est propre à analyser la conformité de la signature optique de la suite d'images transmise par convolution des figures de la suite d'images transmise avec un ensemble de modèles prédéfinis pour chaque figure. L'ensemble de modèles prédéfinis pour chaque figure regroupe l'ensemble des positions possibles du motif 35 sur les zones de la figure au cours de la séquence prédéfinie. L'ensemble de modèles est donc prédéfini, pour chaque figure, en fonction de la séquence prédéfinie de déplacement du motif 35 sur les zones de la figure. Dans l'exemple de la
figure 2 , l'ensemble de modèles prédéfinis comprend quatre modèles de figures ayant chacun une zone contenant le motif différente d'un modèle de figure à un autre. - L'unité d'analyse 38 est ainsi propre à déterminer l'ordre et la durée de présence du motif 35 sur les zones de chaque figure de la suite d'images transmise.
- L'unité d'analyse 38 est alors configurée pour comparer la séquence de déplacement du motif 35 déterminée par rapport à la séquence prédéfinie enregistrée dans la mémoire 39.
- Lorsque le déplacement du motif 35 de la suite d'images transmise reproduit la séquence prédéfinie pour chaque figure, la signature optique est dite conforme à la suite d'images transmise et la transmission est considérée sécurisée.
- En variante, en fonction des tolérances souhaitées et du risque d'erreurs accepté, la suite d'images transmise est conforme lorsque le déplacement du motif 35 reproduit la séquence prédéfinie pour un certain nombre de figures mais pas forcément pour la totalité des figures, par exemple seulement pour 75 pourcents (%) des figures.
- Le système de restitution 18 est propre à communiquer le résultat de l'analyse effectuée par le système d'analyse 16. Le système de restitution 18 est, par exemple, configuré pour générer une alerte lorsque la signature optique de la suite d'images transmise n'est pas conforme.
- En complément de l'alerte, le système de restitution 18 est également propre à ordonner l'arrêt immédiat du véhicule 19 par tout moyen existant.
- Optionnellement, le système d'affichage 20 est propre à afficher la suite d'images transmise avec éventuellement un indicateur de la conformité de la signature optique de la suite d'images transmise. Le système d'affichage 20 utilise tout moyen existant, par exemple une croix barrant l'affichage, un affichage noir, un cadre rouge, un filtre translucide rouge, pour indiquer à l'opérateur que l'affichage n'est plus sécurisé.
- En complément, l'opérateur peut choisir d'afficher ou de masquer la zone de l'écran contenant la signature optique.
- Le système d'affichage 20 est, par exemple, un écran.
- Le procédé de sécurisation d'une transmission à distance d'une suite d'images d'un objet va maintenant être décrit en référence à la
figure 3 illustrant un organigramme dudit procédé. - Le procédé de sécurisation est mis en oeuvre automatiquement par les systèmes, unités et dispositifs de l'installation 10.
- Lors d'une étape 90 initiale, le système d'acquisition vidéo 21 forme l'image de l'objet 11 sur sa surface d'acquisition.
- Lors d'une étape 100, le module de génération 24 du dispositif de formation 12 génère l'image de sécurisation comprenant la signature optique.
- Puis, lors d'une étape 105, le module de superposition 26 projette l'image de sécurisation générée sur le réflecteur 28.
- Lors d'une étape 110 suivante, le module de superposition 26 superpose, sur la surface d'acquisition, par l'intermédiaire du réflecteur 28, l'image de sécurisation à l'image de l'objet pour former une image sécurisée de l'objet 11.
- Ensuite, lors d'une étape 120 suivante, le système d'acquisition vidéo 21 acquiert une suite d'images sécurisées formées successivement par répétition des étapes précédentes. La suite d'images sécurisée est transmise en continu au système d'analyse 16 via l'unité de transmission 15.
- Puis, lors d'une étape 130 suivante, l'unité de réception 36 du système d'analyse 16 réceptionne successivement les images de la suite d'images transmise.
- Ensuite, lors d'une étape 140, l'unité d'analyse 38 du système d'analyse 16 analyse la conformité de la signature optique de la suite d'images transmise. Pour cela, l'unité d'analyse 38 effectue, par exemple, la convolution de chaque figure de la suite d'images transmise avec les modèles prédéfinis pour chaque figure et compare la séquence déterminée de déplacement du motif 35 sur les zones de chaque figure avec la séquence prédéfinie pour la figure.
- Le système de restitution 18 communique lors d'une étape 150 suivante, les résultats de l'analyse effectuée par le système d'analyse 16. Pour cela, le système de restitution 18 génère, par exemple, une alerte ou un arrêt d'urgence du véhicule 19 lorsque la signature optique de la suite d'images transmise est jugée non conforme.
- Ensuite, lors d'une étape optionnelle 160, le système d'affichage 20 affiche successivement les images de la suite d'images transmise.
- En variante, la suite d'images transmise est affichée uniquement lorsqu'elle est dite conforme.
- Ainsi, la forme spécifique de la signature optique permet d'obtenir une signature optique dynamique avec un même motif 35 se déplaçant selon une séquence connue. Cela facilite la compression et l'analyse de la signature optique et par là-même la détection d'images non conformes.
- La détection d'erreurs ou de problèmes dans la transmission se fait par un algorithme simple, mettant en oeuvre une convolution. Un tel algorithme de détection serait plus complexe dans le cas d'une signature optique comprenant un datage notamment, car cela nécessiterait une synchronisation préalable de l'émetteur et du récepteur.
- En outre, la forme polygonale des zones de la figure facilite la compression de l'image de sécurisation et donc sa transmission. Ainsi, la bande passante utilisée pour la transmission de la suite d'images sécurisées est encore minimisée.
- De plus, la redondance des figures permet d'améliorer la tenue aux erreurs de transmission vidéo en tunnel et de couvrir le risque de confusion de la suite d'images acquise en temps réel avec une suite d'images préalablement mémorisée dans la caméra.
- Enfin, la connaissance exacte de la chronométrie de la séquence permet de détecter une éventuelle dérive lente du temps de transmission de la vidéo en analysant en continue l'historique des chronométries mesurées à la réception.
- Ainsi, un tel système de sécurisation est propre à définir un niveau d'intégrité de sécurité SIL 2 (acronyme de l'anglais « Safety Integrated Level ») ou SIL 3, un niveau d'intégrité de sécurité étant un niveau relatif de réduction de risques inhérents à une fonction de sécurité.
Claims (6)
- Installation (10) de sécurisation d'une transmission à distance d'images d'un objet (11), l'installation (10) comprenant :- un dispositif de formation (12) d'une image sécurisée d'un objet (11), le dispositif (12) comprenant :- un système d'acquisition vidéo (21) comprenant une surface d'acquisition, l'image de l'objet (11) étant formée sur la surface d'acquisition,- un module (24) de génération d'une image de sécurisation, l'image de sécurisation comprenant une signature optique, et- un module de superposition (26) de l'image de sécurisation sur l'image de l'objet (11), formée sur la surface d'acquisition, pour former une image sécurisée de l'objet (11) sur la surface d'acquisition,- une unité (15) de transmission à distance d'une suite d'images sécurisées de l'objet (11) formées successivement par le dispositif de formation (12),- un système d'analyse (16) de la conformité de la signature optique de la suite d'images transmise avec la séquence prédéfinie de déplacement du motif (35) pour chaque figure (A, B, C, D) de la signature optique, et- un système de restitution (18) du résultat de l'analyse,caractérisé en ce que la signature optique comprend au moins deux figures (A, B, C, D) comprenant au moins deux zones (A1, A2, A3, A4, B1, B2, B3, B4, C1, C2, C3, C4, D1, D2, D3, D4), les figures (A, B, C, D) de la signature optique étant de forme identique, le module de génération (24) étant propre à générer un motif (35) se déplaçant sur les zones de chaque figure (A, B, C, D) selon une séquence prédéfinie, la séquence prédéfinie de déplacement du motif (35) entre les zones de chaque figure (A, B, C, D) étant distincte d'une figure (A, B, C, D) à une autre,
le système d'analyse (16) étant propre à analyser la conformité de la signature optique de la suite d'images transmise par convolution des figures (A, B, C, D) de la suite d'images transmise avec un ensemble de modèles prédéfinis pour chaque figure (A,B,C,D), l'ensemble de modèles étant prédéfini à partir de la séquence prédéfinie pour chaque figure (A, B, C, D), l'ensemble de modèles prédéfinis comprenant des modèles de figures ayant chacun une zone contenant le motif, la zone étant différente d'un modèle de figure à un autre. - Installation (10) selon la revendication 1, dans lequel les zones de chaque figure (A, B, C, D) et le motif (35) ont une forme polygonale simple, de préférence une forme carrée ou rectangulaire.
- Installation (10) selon la revendication 1 ou 2, dans lequel la séquence prédéfinie pour chaque figure (A, B, C, D) définit l'ordre et la durée de présence du motif (35) sur les zones de la figure (A, B, C, D).
- Installation (10) selon l'une quelconque des revendications 1 à 3, dans lequel le module de superposition (26) comprend un projecteur lumineux propre à projeter l'image de sécurisation sur un réflecteur (28), le réflecteur (28) étant situé dans le champ de vision du système d'acquisition vidéo (21).
- Installation (10) selon la revendication 4, dans lequel le réflecteur (28) est choisi parmi le groupe consistant en : une plaque semi-transparente située entre le système d'acquisition vidéo (21) et l'objet (11), une plaque transparente située entre le système d'acquisition vidéo (21) et l'objet (11), la plaque transparente comportant au moins une zone dépolie à l'emplacement de la projection de chaque figure (A, B, C, D) de la signature optique, et un pare-brise d'un véhicule (19) dans lequel le dispositif de formation (12) est propre à être installé.
- Installation (10) selon l'une quelconque des revendications précédentes, dans laquelle le système d'analyse est propre à comparer le déplacement du motif (35) sur les zones de chaque figure (A, B, C, D) de la suite d'images transmise, avec la séquence prédéfinie pour chaque figure (A, B, C, D), la suite d'images transmise étant conforme lorsque le déplacement du motif (35) reproduit la séquence prédéfinie pour chaque figure (A, B, C, D).
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR1557449A FR3039732B1 (fr) | 2015-07-31 | 2015-07-31 | Dispositif de formation d'une image securisee d'un objet, installation et procede associes |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3125546A1 EP3125546A1 (fr) | 2017-02-01 |
| EP3125546B1 true EP3125546B1 (fr) | 2023-12-13 |
Family
ID=54207565
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP16182099.8A Active EP3125546B1 (fr) | 2015-07-31 | 2016-07-29 | Dispositif de formation d'une image sécurisée d'un objet, installation et procédé associés |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP3125546B1 (fr) |
| FR (1) | FR3039732B1 (fr) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10710621B2 (en) * | 2017-11-28 | 2020-07-14 | Hitachi Rail Sts France | Method, system and apparatus for controlling a vehicle |
| EP3821594A1 (fr) * | 2018-07-13 | 2021-05-19 | ABB Schweiz AG | Procédé de surveillance de caméra |
| US20230122529A1 (en) * | 2020-03-11 | 2023-04-20 | Moog Inc. | Camera system in situation built-in-test |
| FR3110313A1 (fr) * | 2020-05-18 | 2021-11-19 | Commissariat A L'energie Atomique Et Aux Energies Alternatives | Système de vidéosurveillance |
| CN113619599B (zh) * | 2021-03-31 | 2023-03-24 | 中汽创智科技有限公司 | 一种远程驾驶方法、系统、装置及存储介质 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10006091A1 (de) * | 2000-02-11 | 2000-08-24 | Plettac Ag | Verfahren und Vorrichtung zur Erkennung von Fehlern in Signalverarbeitungsanlagen der Sicherheitstechnik |
| DE10047896A1 (de) * | 2000-09-26 | 2002-04-11 | Saftey Control | Verfahren zum Überprüfen der Funktionstüchtigkeit einer Sensoreinrichtung |
| DE102008034160A1 (de) * | 2008-07-22 | 2010-03-18 | Siemens Aktiengesellschaft | Vorrichtung zur Überwachung eines räumlichen Bereichs, insbesondere in der Umgebung oder innerhalb eines Fahrzeugs |
| KR101991135B1 (ko) * | 2010-05-19 | 2019-06-19 | 지멘스 에스에이에스 | 차량의 원격 제어를 위한 원격 비디오 송신의 보안 |
-
2015
- 2015-07-31 FR FR1557449A patent/FR3039732B1/fr active Active
-
2016
- 2016-07-29 EP EP16182099.8A patent/EP3125546B1/fr active Active
Also Published As
| Publication number | Publication date |
|---|---|
| FR3039732A1 (fr) | 2017-02-03 |
| FR3039732B1 (fr) | 2017-09-15 |
| EP3125546A1 (fr) | 2017-02-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3125546B1 (fr) | Dispositif de formation d'une image sécurisée d'un objet, installation et procédé associés | |
| US11483503B2 (en) | Three-dimensional sensor including bandpass filter having multiple passbands | |
| EP1989582B1 (fr) | Procede et dispositif d'identification et de calibration de systemes optiques panoramiques | |
| CN102971776B (zh) | 障碍物检测系统以及方法、障碍物检测装置 | |
| FR2864311A1 (fr) | Procede et systeme de visualisation pour vehicule | |
| EP2576315B1 (fr) | Securisation d'une transmission video a distance destinee au controle a distance d'un vehicule | |
| FR2938330A1 (fr) | Evaluation du relief de la surface d'un pneumatique par stereovision active | |
| EP0117162A1 (fr) | Procédé pour la détection d'une source de chaleur notamment d'un incendie de forêt dans une zone surveillée, et système pour la mise en oeuvre de ce procédé | |
| FR2711069A1 (fr) | Procédé de détection des situations de hors jeu de football et installation pour la mise en Óoeuvre dudit procédé. | |
| EP2098072B1 (fr) | Dispositif pour permettre une communication par visioconference et procede de communication associe | |
| EP3330891B1 (fr) | Système de communication avec dispositif antifraude | |
| CA1301327C (fr) | Procede et dispositif de determination du nombre de personnes presentesdans un espace determine | |
| EP2862154B1 (fr) | Regroupement de donnees attachees a des images | |
| WO2015025103A2 (fr) | Dispositif de décision prévu pour décider si un œil est vrai ou faux | |
| EP3926529B1 (fr) | Systèmes et méthodes de détermination d'un nombre de personnes dans un véhicule | |
| EP2359220B1 (fr) | Dispositif et procédé de synchronisation d'une onde lumineuse avec un signal electronique | |
| JP7484904B2 (ja) | 撮像素子、信号処理装置、信号処理方法、プログラム、及び、撮像装置 | |
| EP1526492B1 (fr) | Procédé et dispositif d'identification d'un véhicule en déplacement | |
| EP1542191B1 (fr) | Procédé et système d'identification d'un véhicule en déplacement | |
| EP0809408A1 (fr) | Caméra à effets spéciaux | |
| EP2877979B1 (fr) | Methode monocamera de determination d'une direction d'un solide | |
| EP4340546A1 (fr) | Procédé de détection d'un dysfonctionnement d'un luminaire, dispositif de détection électronique et produit programme d'ordinateur associés | |
| EP4128055A1 (fr) | Dispositif et procédé d'aide à la décision d'un système cognitif artificiel | |
| CA3064077A1 (fr) | Procede pour verifier l'affichage d'un contenu par un dispositif d'affichage numerique et systeme d'affichage numerique | |
| WO2024003330A2 (fr) | Procédé de contrôle d'un organe pilotable à distance faisant intervenir un ou plusieurs objets mobiles |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20170704 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| 17Q | First examination report despatched |
Effective date: 20180403 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R079 Ref document number: 602016084667 Country of ref document: DE Free format text: PREVIOUS MAIN CLASS: H04N0007180000 Ipc: B61L0015000000 Ref country code: DE Ref legal event code: R079 Free format text: PREVIOUS MAIN CLASS: H04N0007180000 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: B61L 23/04 20060101ALI20230613BHEP Ipc: B61L 15/00 20060101AFI20230613BHEP |
|
| INTG | Intention to grant announced |
Effective date: 20230704 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230823 |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: ALSTOM HOLDINGS |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602016084667 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: FRENCH |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: FP |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240314 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20231213 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20231213 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240314 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240313 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 1640236 Country of ref document: AT Kind code of ref document: T Effective date: 20231213 |