EP2975469A1 - Guidage flexible horloger - Google Patents
Guidage flexible horloger Download PDFInfo
- Publication number
- EP2975469A1 EP2975469A1 EP14176918.2A EP14176918A EP2975469A1 EP 2975469 A1 EP2975469 A1 EP 2975469A1 EP 14176918 A EP14176918 A EP 14176918A EP 2975469 A1 EP2975469 A1 EP 2975469A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- construction
- assembly
- blades
- building boards
- rotation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Classifications
-
- G—PHYSICS
- G04—HOROLOGY
- G04B—MECHANICALLY-DRIVEN CLOCKS OR WATCHES; MECHANICAL PARTS OF CLOCKS OR WATCHES IN GENERAL; TIME PIECES USING THE POSITION OF THE SUN, MOON OR STARS
- G04B15/00—Escapements
- G04B15/14—Component parts or constructional details, e.g. construction of the lever or the escape wheel
-
- G—PHYSICS
- G04—HOROLOGY
- G04B—MECHANICALLY-DRIVEN CLOCKS OR WATCHES; MECHANICAL PARTS OF CLOCKS OR WATCHES IN GENERAL; TIME PIECES USING THE POSITION OF THE SUN, MOON OR STARS
- G04B17/00—Mechanisms for stabilising frequency
- G04B17/04—Oscillators acting by spring tension
-
- G—PHYSICS
- G04—HOROLOGY
- G04B—MECHANICALLY-DRIVEN CLOCKS OR WATCHES; MECHANICAL PARTS OF CLOCKS OR WATCHES IN GENERAL; TIME PIECES USING THE POSITION OF THE SUN, MOON OR STARS
- G04B17/00—Mechanisms for stabilising frequency
- G04B17/04—Oscillators acting by spring tension
- G04B17/045—Oscillators acting by spring tension with oscillating blade springs
-
- G—PHYSICS
- G04—HOROLOGY
- G04B—MECHANICALLY-DRIVEN CLOCKS OR WATCHES; MECHANICAL PARTS OF CLOCKS OR WATCHES IN GENERAL; TIME PIECES USING THE POSITION OF THE SUN, MOON OR STARS
- G04B31/00—Bearings; Point suspensions or counter-point suspensions; Pivot bearings; Single parts therefor
- G04B31/06—Manufacture or mounting processes
Definitions
- the present invention relates to a flexible watchmaking guide, in particular a rotationally flexible guiding device for pivoting a member of a watch movement about an axis of rotation.
- the spring blades extending in the radial direction are fragile and do not have an optimal shape for the desired function, namely a great flexibility in the plane orthogonal to the axis of rotation and a high rigidity in the direction of the axis of rotation.
- the control of the thickness of the blade is difficult to control precisely, which adversely affects the performance and especially the properties of flexibility, robustness and well defined elasticity parameters.
- An object of the invention is to provide a guide device elastic rotationally compact and economical to manufacture, and having a good performance in use.
- an elastic guide device in rotation for a clock mechanism for rotating a member relative to another member about an axis of rotation defining an axial direction.
- the device includes construction blades, each construction blade includes an assembly attachment portion comprising a body and a functional portion extending from the body to an end, the assembly attachment portion and the functional portion being separated by at least one slot into at least two elastically connected extensions and which extend in a radial direction, said direction transverse to the axial direction, said device further comprising anchor zones disposed at opposite axial ends of the flexible guidance, the anchoring zones being configured to be fixed to said members.
- the building boards are formed from a thin plate (wafer) of material, in particular of crystalline material, defining a main plane, the building boards being oriented so that the axis of rotation of the flexible guide is parallel to the plane main construction blades.
- the thin plate comprises two layers of equal or different thicknesses welded or glued together, the building blade having portions with a thickness corresponding to the thickness of one of the layers and portions with a thickness of thickness corresponding to the thickness of the two layers.
- the assembly fastening portion of each of the building boards includes a recess-intersecting assembly cavity and recess and an assembly extension, in a radial direction for to be locked together.
- the body represents a central portion of the device including an axis of rotation of the device.
- the body of at least one of the building boards comprises an assembly cavity configured for insertion, in a radial direction, transverse to the axial direction, of a portion of the other construction blade so that in the assembly fastening portion of the construction blades intersect.
- one of the construction blades includes a slot forming the assembly cavity, the functional portion of the other blade being inserted into the slot until the body of the latter butts against the body of the first.
- each construction blade can be formed by deposition and / or etching processes according to an essentially two-dimensional process
- the building boards are made of a silicon-based material.
- the building boards may for example be formed of a wafer cut from a monocrystalline silicon block.
- the building boards may be Ni, NiP, amorphous metal or be formed by a LIGA type electroforming process.
- the building boards may also include sacrificial structures that assist in assembly.
- each construction blade comprises a functional portion extending in a radial direction on either side of the body, this body forming a central portion of rotation relative to the ends of the blades.
- the ends of the blades are free and floating.
- the device can advantageously be configured as a spring, and simultaneously as a support, for an oscillator or pivoting member about the axis of rotation, without the need for another pivot or support for the pivoting member.
- each of the building boards includes only a functional portion extending from the assembly attachment portion, forming for example a substantially "V" configuration.
- the assembly fastening portion of each of the building boards includes an intersecting assembly cavity and an extension assembly that interlock in a radial direction to be locked together.
- the building boards comprise a plurality of slots spaced apart in the axial direction to form a plurality of functional extensions having resilient portions.
- each building blade forms a monolithic structure.
- the device comprises only two monolithic construction blades.
- an elastically rotational guiding device 2 comprises construction blades 4a, 4b configured to be assembled and secured together to form the rotational elastic guiding device.
- Each construction blade comprises at least one slot 12 separating the construction blade into at least two elastically coupled and removable parts.
- the elastic guide device allows the rotation about an axis of rotation Z, of a member 1 (for example a rocker or an anchor) relative to another member 3 (for example a frame), the members attached to the device of elastic guide to the anchoring zones 9, 11 respectively.
- the anchoring zones 9, 11 are arranged at opposite axial ends of the flexible guiding device, the axial direction being defined by the axis of rotation Z.
- the building boards 4a, 4b comprise an assembly fastener portion 6, and a functional portion 10 extending from the assembly fastener portion to a free end 8, the assembly fastener portion 6, and the functional part 10 being separated by at least one slot 12 in at least two elastically connected extensions 17 extending in a radial direction X, Y transverse to the axial direction Z.
- the device may have construction blades with functional parts on either side of the fastening portion 6 as shown in FIGS. figures 1 a and 1b, or with a functional portion extending only to one side of the fastening fastening portion 6 as illustrated in FIGS. Figures 2a to 2c .
- the assembly fixing portion 6 may constitute a body 13, which in certain embodiments or variants, represents the central part of the device including the axis of rotation Z of the device.
- the axial direction represented by the Z axis which is parallel to the axis of rotation of the rotationally elastic guiding device.
- the radial direction is illustrated by the X and Y axes lying in a plane orthogonal to the orthogonal direction Z.
- it is sought to have high rigidity in the axial direction and great flexibility in rotation.
- the assembly fastening portion comprises a body 13a, 13b, the body 13b of at least one of the building boards 4b including an assembly recess or recess 14 configured for insertion in a radial direction of a part of the other construction blade 4a so that in the assembly fixing portion 6 the construction blades 4a, 4b intersect.
- This intercrossing of assembly fixing parts of the two construction blades 4a, 4b is very advantageous since it makes it possible to independently manufacture the building boards in an optimal manner to define the thicknesses of the blade while having, once assembled, a rotationally guiding device with high rigidity in the axial direction Z.
- each building blade 4a, 4b may be formed by known methods of deposition or etching, for example through a photolithography mask, silicon or other materials in an essentially two-dimensional process.
- a two-dimensional process makes it possible to obtain precise thicknesses along the length of the blade as well as shapes represented by different thicknesses on the length of the blade easy to manufacture with great accuracy via masks defined by simple photolithography processes.
- the direction of growth or reduction of the blades can be carried out only in a direction of elastic displacement Tx, Ty orthogonal to the radial direction X, Y, such a process being simple, economical and allowing good control of the thicknesses in order to obtain rigid blades in the axial direction Z but having a precise elasticity and well controlled with a uniform and robust structure.
- the construction strips are formed from a plate cut from a block of material, in particular a crystalline material, the plate being commonly called "wafer".
- the block of material may in particular be a monocrystalline silicon block or the block of another material used in the industry of wafers for integrated circuits or micromechanics.
- the engraving of the building boards is carried out in a direction orthogonal to the main plane of the board (which is parallel to the cutting surface of the board).
- the building boards are oriented so that the axis of rotation of the flexible guide, which extends in the axial direction Z, is parallel to the main plane of the building boards.
- the properties and elastic characteristics of the building boards in their direction of elastic displacement Tx, Ty are therefore dependent on the thicknesses in the direction orthogonal to the main plane, these thicknesses being able to be very well controlled in economical manufacturing processes.
- the plate may comprise two layers of equal or different thicknesses welded or glued together, which allows, in an etching process, to obtain precise thicknesses corresponding to the thicknesses of one or the other layers.
- the interface between the two layers defines a threshold for precisely stopping the reduction of material at the interface during the etching process. Precision in the formation of thicknesses is a advantage to master the elastic properties and strength of the construction blades. In this embodiment, it is possible economically and accurately to produce two-level building boards, having parts with a thickness corresponding to the thickness of one or the other of the layers and parts with a corresponding thickness. to the thickness of the two layers.
- the building boards may also include sacrificial structures that assist in assembly.
- one of the building boards 4b comprises a slot 14 forming the assembly cavity, the functional part 10 of the other board 4a being inserted in the slot 14 until the body 13a of the latter board against the body 13b of the construction blade 4b.
- each construction blade 4a, 4b comprises a functional portion 10 extending in a radial direction on either side of the body 13a, 13b, this body forming a central portion of rotation relative to the ends 8 of the blades.
- the ends 8 of the blades are free.
- the ends 8 may be attached to a pendulum or to a frame or other structure.
- the body 13a, 13b is fixed in the anchoring zones 9, 11 on either side of the slot 12 with two members, one being movable relative to the other.
- one of the anchoring zones 9 may be attached to a frame, and the other of the anchoring zones to a pivoting member relative to the frame.
- the device may serve as a spring and support for an oscillator or pivoting member about the axis of rotation Z, without the need for another pivot or support for the pivoting member.
- the device may, however, be used in other configurations, for example the central body 13 may be attached to two movable members to the anchoring zones 9, 11, the ends 8 of the blades being coupled to a frame.
- the building boards 4a, 4b each comprise only a functional extension portion 10 extending from the assembly fastening portion 6 forming a "V" configuration.
- the axial ends 9, 11 of the assembly fixing portion 6 may be coupled to members or movable structures relative to each other.
- the assembly fastening portion 6 of each of the building boards 4a, 4b includes an assembly recess 14 and an assembly extension 15 which interlock and interlock to lock together.
- the two construction blades can be locked together by a welding or brazing process, by an adhesive, or by a clamp or other mechanical clipping means.
- the building boards 4a, 4b may comprise a plurality of slots 12 spaced in the axial direction Z as illustrated in FIG. Figure 2c , the figure 3 and the Figures 4a to 4c to form a plurality of functional extension portions having resilient portions 16. This increases the amplitude of the elastic rotation angle between the anchor zones 9, 11.
- the building boards can have complex shapes while being simple to manufacture with precision, by varying the thickness in the direction of etching respectively deposition (direction T ) for example as illustrated in FIGS. Figures 2a to 2c with a functional part comprising elastic portions 16 and a rigid portion 18 interposed between the elastic portions and a radial slot 12 or several radial slots 12.
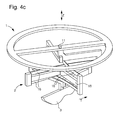
- FIGS. Figures 4a to 4c Another example is illustrated in FIGS. Figures 4a to 4c , where the blades comprise elastic portions 16 extending substantially over the entire length of the blade and connected at their ends 8 to rigid portions 18, the rigid portions extending from the ends 8 to the pivot axis Z.
- Elastic portions have thinner walls than the walls of the rigid portions.
- the elasticity in the direction of rotation (direction T ) of the building boards can be controlled by varying the length of the rigid portions 18 respectively the length of the elastic portions 16, and also by varying the number of radial extensions, respectively of slots, stacked in the axial direction. This also makes it possible to control the distribution of masses and ultimately not only the spring constant but also the resonant frequencies, including first-order elastic system.
- An advantage of the invention is that the building boards can be manufactured as structured pieces and in two levels: a first level which can be very thin, for example of the order of 10 ⁇ m to shape the flexible blades, and a thicker level, for example of the order of magnitude of 400 ⁇ m, to achieve rigid amounts, this essentially giving a structured two-level planar piece with slots.
- the assembly of two blades by interlocking and interlocking is also very simple to perform.
- a flexible guide according to the invention can be used for various applications, for example as guiding the anchor in a watch, or as a guide of the balance in a watch, the balance having no pivot axis to friction or spiral, these two elements being replaced by the flexible guide.
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Manufacturing & Machinery (AREA)
- Micromachines (AREA)
- Mechanical Light Control Or Optical Switches (AREA)
- Springs (AREA)
Abstract
Description
- La présente invention concerne un guidage flexible horloger, notamment un dispositif de guidage élastique en rotation permettant le pivotement d'un organe d'un mouvement de montre autour d'un axe de rotation.
- Dans les mouvements horlogers il y a plusieurs composants qui pivotent autour d'un axe de rotation tel que l'ancre, ou le balancier d'un dispositif d'échappement. Certains de ces organes pivotants sont couplés à un ressort, entre autre des organes oscillants, tels que le balancier du dispositif d'échappement. Dans les montres mécaniques, il est avantageux d'avoir un mouvement à haut rendement afin d'augmenter la réserve de marche. La perte d'énergie due aux frottements dans les paliers des pièces pivotantes est l'une des sources de perte d'énergie les plus importantes. Le facteur de qualité des pièces est aussi une considération importante pour les montres mécaniques.
- Afin de réduire ces pertes, il est connu de proposer un guidage en rotation flexible oscillant autour d'un pivot sans paliers tel que décrit dans la demande de brevet
EP 2 273 323 . Ce guidage flexible comprend des composants en silicium gravés dans une plaque de silicium pour réaliser une structure monolithique comportant un cadre, des lames élastiques et un corps d'attache central. Pour obtenir un cadre suffisamment robuste et une amplitude de rotation suffisamment élevée pour la fonction d'oscillateur, une pluralité de ces structures monolithiques sont empilées les unes sur les autres. L'un des inconvénients de cette structure est que le coût de fabrication des éléments monolithiques tridimensionnels est élevé. En outre, les lames de ressort s'étendant dans la direction radiale sont fragiles et n'ont pas une forme optimale pour la fonction désirée, à savoir une grande souplesse dans le plan orthogonal à l'axe de rotation et une grande rigidité dans la direction de l'axe de rotation. En effet, comme les lames sont gravées dans une plaque de silicium selon la direction orthogonale à la surface de la plaque, le contrôle de l'épaisseur de la lame est difficile à maîtriser avec précision, ce qui influe négativement sur les performances et notamment les propriétés de souplesse, de robustesse et de paramètres d'élasticité bien déterminés. - Un objet de l'invention est de fournir un dispositif de guidage élastique en rotation compact et économique à fabriquer, et ayant un bon rendement à l'usage.
- Il est avantageux, pour certaines fonctions, de fournir un dispositif de guidage élastique permettant un grande angle de rotation.
- Il est avantageux de fournir un procédé de fabrication d'un dispositif de guidage élastique en rotation permettant de réaliser des structures complexes, selon l'application, mais qui soit économique à mettre en oeuvre.
- Il est avantageux de fournir un dispositif de guidage élastique à très faible consommation d'énergie à l'usage.
- Il est avantageux de fournir un dispositif de guidage élastique robuste.
- Des objets de l'invention sont réalisés par un dispositif de guidage élastique en rotation pour un mécanisme horloger selon la revendication 1. Les revendications dépendantes décrivent des aspects avantageux de l'invention.
- Dans la présente est décrit un dispositif de guidage élastique en rotation pour un mécanisme horloger permettant la rotation d'un organe par rapport à un autre organe autour d'un axe de rotation définissant une direction axiale.
- Le dispositif comprend des lames de construction, chaque lame de construction comprend une partie de fixation d'assemblage comprenant un corps et une partie fonctionnelle s'étendant du corps jusqu'à une extrémité, la partie de fixation d'assemblage et la partie fonctionnelle étant séparées par au moins une fente en au moins deux extensions élastiquement connectées et qui s'étendent dans une direction radiale, ladite direction transversale à la direction axiale, ledit dispositif comprenant en autre des zones d'ancrage disposées à des extrémités axiales opposées du dispositif de guidage flexible, les zones d'ancrage étant configurées pour être fixées auxdits organes. Les lames de construction sont formées à partir d'une plaque mince (wafer) de matériau, notamment de matériau cristallin, définissant un plan principal, les lames de construction étant orientées de sorte que l'axe de rotation du guidage flexible soit parallèle au plan principal des lames de construction.
- Dans une forme d'exécution, la plaque mince comprend deux couches d'épaisseurs égales ou différentes soudées ou collées ensemble, la lame de construction ayant des parties avec une épaisseur correspondant à l'épaisseur de l'une des couches et des parties avec une épaisseur correspondant à l'épaisseur des deux couches.
- Dans une forme d'exécution, la partie de fixation d'assemblage de chacune des lames de construction comprend une cavité ou un dégagement d'assemblage et une extension d'assemblage qui s'entrecroisent et qui s'emboîtent, selon une direction radiale pour être verrouillées ensemble.
- Dans une forme d'exécution, le corps représente une partie centrale du dispositif englobant un axe de rotation du dispositif.
- Dans une forme d'exécution, le corps d'au moins l'une des lames de construction comprend une cavité d'assemblage configurée pour l'insertion, selon une direction radiale, transversale à la direction axiale, d'une partie de l'autre lame de construction de sorte que dans la partie de fixation d'assemblage des lames de construction s'entrecroisent.
- Dans une forme d'exécution, l'une des lames de construction comprend une fente formant la cavité d'assemblage, la partie fonctionnelle de l'autre lame étant insérée dans la fente jusqu'à ce que le corps de cette dernière butte contre le corps de la première.
- Avantageusement, chaque lame de construction peut être formée par des procédés de dépôt et/ou de gravage selon un procédé essentiellement bidimensionnel,
- Dans une forme d'exécution, les lames de construction sont en une matière à base de silicium. Dans une forme d'exécution, les lames de construction peuvent par exemple être formées d'un wafer découpé à partir d'un bloc de silicium monocristallin.
- Dans d'autres formes d'exécution les lames de construction peuvent être en Ni, NiP, métal amorphe ou être formées par un procédé d'électroformage de type LIGA.
- Les lames de construction peuvent aussi comporter des structures sacrificielles qui aident à l'assemblage.
- Dans une forme d'exécution, chaque lame de construction comprend une partie fonctionnelle s'étendant dans une direction radiale de part et d'autre du corps, ce corps formant une partie centrale de rotation par rapport aux extrémités des lames.
- Dans une forme d'exécution, les extrémités des lames sont libres et flottantes.
- Dans une forme d'exécution, le dispositif peut avantageusement être configuré en tant que ressort, et simultanément en tant que support, pour un oscillateur ou organe pivotant autour de l'axe de rotation, sans avoir besoin d'un autre pivot ou support pour l'organe pivotant.
- Dans une forme d'exécution, chacune des lames de construction ne comprend qu'une partie fonctionnelle s'étendant de la partie de fixation d'assemblage, formant par exemple une configuration essentiellement en "V".
- Dans une forme d'exécution, la partie de fixation d'assemblage de chacune des lames de construction comprend une cavité d'assemblage et une extension d'assemblage qui s'entrecroisent et qui s'emboîtent dans une direction radiale pour être verrouillées ensemble.
- Dans une forme d'exécution, les lames de construction comprennent une pluralité de fentes espacées dans la direction axiale pour former une pluralité d'extensions fonctionnelles ayant des portions élastiques.
- Dans une forme d'exécution avantageuse, chaque lame de construction forme une structure monolithique.
- Dans une forme d'exécution avantageuse, le dispositif ne comprend que deux lames de construction monolithiques.
- D'autres buts et aspects avantageux de l'invention apparaitront à la lecture des revendications, ainsi que de la description détaillée de formes d'exécution ci-après, et des dessins annexés, dans lesquels :
- La
Fig. 1a est une vue en perspective schématique d'un dispositif de guidage élastique en rotation pour un mécanisme horloger, selon une forme d'exécution de l'invention ; - La
Fig. 1b est une vue de la forme d'exécution de lafigure 1a en cours d'assemblage ; - La
Fig. 1c est un dessin schématique illustrant une fonction du dispositif de guidage dans un mécanisme; - Les
Fig. 2a, 2b sont des vues en perspective éclatée schématique d'un dispositif de guidage élastique en rotation pour un mécanisme horloger, selon une deuxième forme d'exécution de l'invention ; - La
Fig. 2c est une vue en perspective du dispositif assemblé de lafigure 2a ; - La
Fig. 3 est une vue en perspective schématique d'un dispositif de guidage élastique en rotation pour un mécanisme horloger, selon une troisième forme d'exécution de l'invention ; - La
Fig. 4a est une vue en perspective éclatée d'un dispositif de guidage élastique en rotation pour un mécanisme horloger, selon une quatrième forme d'exécution de l'invention ; - Les
Fig. 4b et4c sont des vues en perspective de la quatrième forme d'exécution en position neutre et pivotée respectivement. - Faisant référence aux figures, un dispositif de guidage élastique en rotation 2 comprend des lames de construction 4a, 4b configurées pour être assemblées et fixées ensemble afin de former le dispositif de guidage élastique en rotation. Chaque lame de construction comprend au moins une fente 12 séparant la lame de construction en au moins deux parties couplées élastiquement et amovibles. Le dispositif de guidage élastique permet la rotation autour d'un axe de rotation Z, d'un organe 1 (par exemple un balancier ou une ancre) par rapport à un autre organe 3 (par exemple un bâti), les organes fixés au dispositif de guidage élastique aux zones d'ancrage 9, 11 respectivement. Les zones d'ancrage 9, 11 sont disposées à des extrémités axiales opposées du dispositif de guidage flexible, la direction axiale étant définie par l'axe de rotation Z.
- Les lames de construction 4a, 4b comprennent une partie de fixation d'assemblage 6, et une partie fonctionnelle 10 s'étendant de la partie de fixation d'assemblage jusqu'à une extrémité libre 8, la partie de fixation d'assemblage 6 et la partie fonctionnelle 10 étant séparées par au moins une fente 12 en au moins deux extensions 17 élastiquement connectés s'étendant dans une direction radiale X, Y transversale à la direction axiale Z.
- Le dispositif peut avoir des lames de construction avec des parties fonctionnelles de part et d'autre de la partie de fixation d'assemblage 6 comme illustré dans les
figures 1 a et 1 b, ou avec une partie fonctionnelle ne s'étendant que d'un côté de la partie de fixation d'assemblage 6 comme illustré dans lesfigures 2a à 2c . La partie de fixation d'assemblage 6 peut constituer un corps 13, qui dans certaines formes d'exécution ou variantes, représente la partie centrale du dispositif englobant l'axe de rotation Z du dispositif. - Dans les figures, la direction axiale représentée par l'axe Z qui est parallèle à l'axe de rotation du dispositif de guidage élastique en rotation. La direction radiale est illustrée par les axes X et Y se trouvant dans un plan orthogonal à la direction orthogonale Z. Dans les applications de guidage flexible on cherche à avoir une grande rigidité dans la direction axiale et une grande flexibilité en rotation.
- La partie de fixation d'assemblage comprend un corps 13a, 13b, le corps 13b d'au moins l'une des lames de construction 4b comprenant une cavité ou un dégagement d'assemblage 14 configuré pour l'insertion dans une direction radiale d'une partie de l'autre lame de construction 4a de sorte que dans la partie de fixation d'assemblage 6 les lames de construction 4a, 4b s'entrecroisent. Cet entrecroisement de parties de fixation d'assemblage des deux lames de construction 4a, 4b est très avantageux puisqu'il permet de fabriquer indépendamment les lames de construction de manière optimale pour définir les épaisseurs de la lame tout en ayant, une fois assemblées, un dispositif de guidage élastique en rotation avec une grande rigidité dans la direction axiale Z. En effet, chaque lame de construction 4a, 4b peut être formée par des procédés connus de dépôt ou de gravage, par exemple à travers un masque photolithographie, de silicium ou d'autres matériaux dans un procédé essentiellement bidimensionnel. Un procédé bidimensionnel permet d'obtenir des épaisseurs précises sur la longueur de la lame ainsi que des formes représentées par différentes épaisseurs sur la longueur de la lame faciles à fabriquer avec une grande précision via des masques définis par des procédés de photolithographie simple. La direction de croissance ou de réduction des lames peut être effectuée uniquement selon une direction de déplacement élastique Tx, Ty orthogonale à la direction radiale X, Y, un tel processus étant simple, économique et permettant de bien maîtriser les épaisseurs afin d'obtenir des lames rigides dans la direction axiale Z mais ayant une élasticité précise et bien contrôlée avec une structure uniforme et robuste.
- Les lames de construction sont formées à partir d'une plaque découpée dans un bloc de matériau, notamment un matériau cristallin, la plaque étant communément appelée « wafer ». Le bloc de matériau peut notamment être un bloc de silicium monocristallin ou le bloc d'un autre matériau utilisé dans l'industrie des wafers pour circuits intégrés ou de la micromécanique. Le gravage des lames de construction est effectué dans une direction orthogonale au plan principal de la plaque (qui est parallèle à la surface de découpe de la plaque). Les lames de construction sont orientées de sorte que l'axe de rotation du guidage flexible, qui s'étend dans la direction axiale Z, soit parallèle au plan principal des lames de construction. Les propriétés et caractéristiques élastiques des lames de constructions dans leur direction de déplacement élastique Tx, Ty sont par conséquent dépendantes des épaisseurs dans la direction orthogonale au plan principal, ces épaisseurs pouvant être très bien maîtrisées dans des procédés de fabrication économiques.
- Dans une forme d'exécution, la plaque peut comporter deux couches d'épaisseurs égales ou différentes soudées ou collées ensemble, cela permettant, dans un procédé de gravage, d'obtenir des épaisseurs précises correspondantes aux épaisseurs de l'une ou l'autre des couches. En effet, l'interface entre les deux couches définit un seuil permettant d'arrêter précisément la réduction de matériau au niveau de l'interface lors du procédé de gravage. La précision dans la formation des épaisseurs est un avantage pour bien maitriser les propriétés élastiques et la résistance des lames de construction. Dans cette forme d'exécution, on peut fabriquer économiquement et avec précision des lames de construction à deux niveaux, ayant des parties avec une épaisseur correspondante à l'épaisseur de l'une ou l'autre des couches et des parties avec une épaisseur correspondante à l'épaisseur des deux couches.
- Les lames de construction peuvent aussi comporter des structures sacrificielles qui aident à l'assemblage.
- Dans la forme d'exécution illustrée dans les
figures 1b et 1a , l'une des lames de construction 4b comprend une fente 14 formant la cavité d'assemblage, la partie fonctionnelle 10 de l'autre lame 4a étant insérée dans la fente 14 jusqu'à ce que le corps 13a de cette dernière butte contre le corps 13b de la lame de construction 4b. Dans la variante illustrée, chaque lame de construction 4a, 4b comprend une partie fonctionnelle 10 s'étendant dans une direction radiale de part et d'autre du corps 13a, 13b, ce corps formant une partie centrale de rotation par rapport aux extrémités 8 des lames. Dans cette forme d'exécution, les extrémités 8 des lames sont libres. Cependant, dans des variantes, les extrémités 8 peuvent être fixées à un balancier ou à un bâti ou à une autre structure. - Le corps 13a, 13b est fixé dans les zones d'ancrage 9, 11 de part et d'autre de la fente 12 à deux organes, l'un étant mobile relatif à l'autre. Par exemple, l'une des zones d'ancrage 9 peut être fixée à un bâti, et l'autre des zones d'ancrage à un organe pivotant par rapport au bâti. Dans cette forme d'exécution, le dispositif peut servir en tant que ressort et de support pour un oscillateur ou organe pivotant autour de l'axe de rotation Z, sans avoir besoin d'un autre pivot ou support pour l'organe pivotant. Le dispositif peut toutefois être utilisé dans d'autres configurations, par exemple le corps central 13 peut être fixé à deux organes mobiles aux zones d'ancrage 9, 11, les extrémités 8 des lames étant couplées à un bâti.
- Faisant référence à la forme d'exécution illustrée dans les
figures 2a à 2c , les lames de construction 4a, 4b ne comprennent chacune qu'une partie d'extension fonctionnelle 10 s'étendant de la partie de fixation d'assemblage 6 formant une configuration en "V". Les extrémités axiales 9, 11 de la partie de fixation d'assemblage 6 peuvent être couplées à des organes ou structures mobiles relatifs entre eux. La partie de fixation d'assemblage 6 de chacune des lames de construction 4a, 4b comprend une cavité d'assemblage 14 et une extension d'assemblage 15 qui s'entrecroisent et qui s'emboîtent pour être verrouillées ensemble. Les deux lames de construction peuvent êtres verrouillées ensemble par un procédé de soudage ou de brasure, par une colle, ou par une pince ou autre moyen de clipsage mécanique. Les lames de construction 4a, 4b peuvent comprendre une pluralité de fentes 12 espacées dans la direction axiale Z tel qu'illustré dans lafigure 2c , lafigure 3 et lesfigures 4a à 4c pour former une pluralité de parties d'extensions fonctionnelles ayant des parties élastiques 16. Cela permet d'augmenter l'amplitude de l'angle de rotation élastique entre les zones d'ancre 9, 11. - Les lames de construction peuvent avoir des formes complexes tout en étant simples à fabriquer avec précision, en variant l'épaisseur dans la direction de gravure respectivement de dépôt (direction T) par exemple comme illustré dans les
figures 2a à 2c avec une partie fonctionnelle comprenant des portions élastiques 16 et une portion rigide 18 interposée entre les portions élastiques ainsi qu'une fente radiale 12 ou plusieurs fentes radiales 12. Un autre exemple est illustré dans lesfigures 4a à 4c , où les lames comprennent des portions élastiques 16 s'étendant essentiellement sur toute la longueur de la lame et connectées à leurs extrémités 8 à des portions rigides 18, les portions rigides s'étendant des extrémités 8 à l'axe de pivot Z. Les portions élastiques ont des parois plus minces que les parois des portions rigides. - L'élasticité dans la direction de rotation (direction T) des lames de construction peut être maîtrisée en variant la longueur des portions rigides 18 respectivement la longueur des portions élastiques 16, et aussi en variant le nombre d'extensions radiales, respectivement de fentes, empilés dans la direction axiale. Cela permet également de maîtriser la distribution des masses et en finalité non seulement la constante du ressort mais également les fréquences de résonnance, notamment de premier ordre du système élastique.
- Un avantage de l'invention est que les lames de construction peuvent être fabriquées en tant que pièces structurées et en deux niveaux : un premier niveau qui peut être très fin, par exemple de l'ordre de 10µm pour façonner les lames flexibles, et un niveau plus épais, par exemple de l'ordre de grandeur de 400µm, permettant de réaliser des montants rigides, cela donnant essentiellement une pièce planaire structurée à deux niveaux avec des fentes. L'assemblage de deux lames par entrecroisement et emboîtement est aussi très simple à effectuer.
- Un guidage flexible selon l'invention peut être utilisé pour différentes applications, par exemple en tant que guidage de l'ancre dans une montre, ou en tant que guidage du balancier dans une montre, le balancier n'ayant plus d'axe pivotant à frottement ni de spirale, ces deux éléments étant remplacés par le guidage flexible.
-
- 1 organe (e.g. balancier)
- 2 dispositif de guidage élastique en rotation
- 3 organe (e.g. bâti)
- 4a, 4b lames de construction
- 6 partie de fixation d'assemblage
- 13 corps
- 14 cavité d'assemblage
- 15 extension d'assemblage
- 8 extrémité libre
- 10 partie fonctionnelle
- 17 extension radiale
- 16 portion élastique
- 18 portion rigide
- 12 fente radiale
- 9, 11 zones d'ancrage
- Z direction axiale / axe de rotation
- X, Y directions radiales
- X-Y plan radial
- Z-X, Z-Y plan axial
- Tx, Ty directions de déplacement élastique
Claims (17)
- Dispositif de guidage élastique en rotation pour un mécanisme horloger permettant la rotation d'un organe par rapport à un autre organe autour d'un axe de rotation Z définissant une direction axiale, comprenant des lames de construction (4a, 4b), chaque lame de construction comprend une partie de fixation d'assemblage (6) comprenant un corps (3a, 3b) et une partie fonctionnelle (10) s'étendant du corps jusqu'à une extrémité (8), la partie de fixation d'assemblage et la partie fonctionnelle étant séparées par au moins une fente (12) en au moins deux extensions (17) élastiquement connectés qui s'étendent dans une direction radiale (X, Y) transversale à la direction axiale, ledit dispositif comprenant en outre des zones d'ancrage (9, 11) disposées à des extrémités axiales opposées du dispositif de guidage flexible, et configurées pour être fixées auxdits organes, ledit dispositif étant caractérisé en ce que les lames de construction sont formées à partir d'une plaque de matériau définissant un plan principal, les lames de construction étant orientées de sorte à ce que l'axe de rotation du guidage flexible Z soit parallèle au plan principal des lames de construction.
- Dispositif selon la revendication 1, caractérisé en ce que ladite plaque est en un matériau cristallin.
- Dispositif selon la revendication 1 ou 2, caractérisé en ce que ladite plaque comprend deux couches d'épaisseurs égales ou différentes soudées ou collées ensemble, la lame de construction ayant des parties avec une épaisseur correspondant à l'épaisseur de l'une des couches et des parties avec une épaisseur correspondant à l'épaisseur des deux couches.
- Dispositif selon l'une des revendications précédentes, caractérisé en ce que le corps représente une partie centrale du dispositif englobant un axe de rotation (Z) du dispositif.
- Dispositif selon l'une des revendications précédentes, caractérisé en ce que le corps (13b) d'au moins l'une des lames de construction (4b) comprend une cavité d'assemblage (14) configurée pour l'insertion, dans une direction radiale, d'une partie de l'autre lame de construction (4a) de sorte que dans la partie de fixation d'assemblage des lames de construction s'entrecroisent.
- Dispositif selon l'une des revendications précédentes, caractérisé en ce que l'une des lames de construction (4b) comprend une fente (14) formant la cavité d'assemblage, la partie fonctionnelle de l'autre lame (4a) étant insérée dans la fente jusqu'à ce que le corps (13a) de cette dernière butte contre le corps (13b) de la première.
- Dispositif selon l'une des revendications précédentes, caractérisé en ce que chaque lame de construction est formée par des procédés de dépôt et/ou de gravage dans un procédé essentiellement bidimensionnel.
- Dispositif selon l'une des revendications précédentes, caractérisé en ce que les lames de construction sont réalisées en une matière à base de silicium.
- Dispositif selon l'une des revendications précédentes, caractérisé en ce que chaque lame de construction comprend une partie fonctionnelle s'étendant dans une direction radiale de part et d'autre du corps, ce corps formant une partie centrale de rotation par rapport aux extrémités (8) des lames.
- Dispositif selon l'une des revendications précédentes, caractérisé en ce que les extrémités (8) des lames sont libres.
- Dispositif selon l'une des revendications précédentes, caractérisé en ce qu'il est configuré en tant que ressort et support pour un oscillateur ou organe pivotant autour de l'axe de rotation Z, sans avoir besoin d'un autre pivot ou support pour l'organe pivotant.
- Dispositif selon l'une des revendications précédentes, caractérisé en ce que chacune des lames de construction ne comprennent qu'une partie fonctionnelle s'étendant de la partie de fixation d'assemblage, formant une configuration en "V".
- Dispositif selon l'une des revendications précédentes, caractérisé en ce que les lames de construction comprennent une pluralité de fentes espacées dans la direction axiale pour former une pluralité d'extensions fonctionnelles ayant des portions élastiques (16).
- Dispositif selon l'une des revendications précédentes, caractérisé en ce que chaque lame de construction forme une structure monolithique.
- Dispositif selon l'une des revendications précédentes, caractérisé en ce qu'il est constitué de deux lames de construction.
- Dispositif selon l'une des revendications précédentes, caractérisé en ce que la partie de fixation d'assemblage de chacune des lames de construction comprend une cavité ou un dégagement d'assemblage (14) et une extension d'assemblage (15) qui s'entrecroisent et qui s'emboîtent dans une direction radiale pour être verrouillées ensemble.
- Mouvement de montre comprenant un dispositif selon l'une des revendications précédentes.
Priority Applications (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CH01064/14A CH709881A2 (fr) | 2014-07-14 | 2014-07-14 | Guidage flexible horloger. |
| EP14176918.2A EP2975469B1 (fr) | 2014-07-14 | 2014-07-14 | Guidage flexible horloger |
| JP2015136645A JP5982541B2 (ja) | 2014-07-14 | 2015-07-08 | 可撓性を有する計時器用ガイダンス |
| US14/795,448 US9323222B2 (en) | 2014-07-14 | 2015-07-09 | Flexible timepiece guidance |
| RU2015128252/12A RU2603571C1 (ru) | 2014-07-14 | 2015-07-13 | Упругий регулятор для часового механизма |
| CN201510408822.8A CN105319940B (zh) | 2014-07-14 | 2015-07-13 | 柔性钟表引导件 |
| HK16109419.6A HK1222000B (en) | 2014-07-14 | 2016-08-08 | Flexible timepiece guidance |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CH01064/14A CH709881A2 (fr) | 2014-07-14 | 2014-07-14 | Guidage flexible horloger. |
| EP14176918.2A EP2975469B1 (fr) | 2014-07-14 | 2014-07-14 | Guidage flexible horloger |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2975469A1 true EP2975469A1 (fr) | 2016-01-20 |
| EP2975469B1 EP2975469B1 (fr) | 2017-07-05 |
Family
ID=57890415
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP14176918.2A Active EP2975469B1 (fr) | 2014-07-14 | 2014-07-14 | Guidage flexible horloger |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9323222B2 (fr) |
| EP (1) | EP2975469B1 (fr) |
| JP (1) | JP5982541B2 (fr) |
| CN (1) | CN105319940B (fr) |
| CH (1) | CH709881A2 (fr) |
| RU (1) | RU2603571C1 (fr) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3276431A1 (fr) * | 2016-07-27 | 2018-01-31 | Cartier International AG | Oscillateur mécanique pour mouvement d'horlogerie |
| EP3792700A1 (fr) * | 2019-09-16 | 2021-03-17 | Patek Philippe SA Genève | Oscillateur horloger a pivot flexible |
| TWI745330B (zh) * | 2016-01-29 | 2021-11-11 | 瑞士商伊塔瑞士鐘錶製造公司 | 時計共振器機構、時計機芯及手錶 |
| EP4163735A1 (fr) | 2021-10-05 | 2023-04-12 | Patek Philippe SA Genève | Procédés de réalisation et de réglage d'un oscillateur a guidage flexible et mouvement horloger comprenant un tel oscillateur |
| WO2025012772A1 (fr) * | 2023-07-13 | 2025-01-16 | Patek Philippe Sa Geneve | Mécanisme horloger |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CH709880A2 (fr) * | 2014-07-14 | 2016-01-15 | Nivarox Sa | Guidage flexible horloger. |
| CH709905B1 (fr) * | 2014-07-21 | 2025-11-28 | Francois Besse | Pivot à lame |
| EP3035127B1 (fr) * | 2014-12-18 | 2017-08-23 | The Swatch Group Research and Development Ltd. | Oscillateur d'horlogerie à diapason |
| ES2698115T3 (es) * | 2015-12-16 | 2019-01-31 | Sa De La Manufacture Dhorlogerie Audemars Piguet & Cie | Mecanismo de regulación de una velocidad media en un movimiento de relojería y movimiento de relojería |
| EP3206089B1 (fr) * | 2016-02-10 | 2018-12-19 | The Swatch Group Research and Development Ltd. | Mécanisme résonateur d'horlogerie |
| CH712601A1 (fr) * | 2016-06-23 | 2017-12-29 | Complitime Sa | Mouvement d'horlogerie comprenant un organe réglant monté dans un support mobile pivotant. |
| EP3299905B1 (fr) * | 2016-09-27 | 2020-01-08 | CSEM Centre Suisse d'Electronique et de Microtechnique SA - Recherche et Développement | Oscillateur mécanique pour un mouvement d'horloge |
| EP3425458A1 (fr) * | 2017-07-07 | 2019-01-09 | ETA SA Manufacture Horlogère Suisse | Pièce sécable d'oscillateur d'horlogerie |
| CH714093B1 (fr) * | 2017-08-29 | 2026-04-15 | Swatch Group Res & Dev Ltd | Pivot isochrone pour résonateur d'horlogerie |
| EP3561607B1 (fr) * | 2018-04-23 | 2022-03-16 | ETA SA Manufacture Horlogère Suisse | Protection antichoc d'un mécanisme résonateur à guidage flexible rotatif |
| EP3572885B1 (fr) * | 2018-05-25 | 2022-04-20 | ETA SA Manufacture Horlogère Suisse | Oscillateur mécanique d'horlogerie isochrone en toute position |
| CH715438A1 (fr) | 2018-10-08 | 2020-04-15 | Mft Et Fabrique De Montres Et Chronometres Ulysse Nardin Le Locle S A | Oscillateur mécanique et mouvement horloger le comprenant. |
| US11409245B2 (en) * | 2018-11-08 | 2022-08-09 | Eta Sa Manufacture Horlogere Suisse | Anti shock protection for a resonator mechanism with a rotary flexure bearing |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3318087A (en) * | 1964-07-10 | 1967-05-09 | Movado And Manufacture Des Mon | Torsion oscillator |
| FR1502775A (fr) * | 1965-09-03 | 1967-11-24 | United States Time Corp | Procédé d'assemblage de ressort de résonateur, particulièrement destiné à un chronomètre |
| EP2273323A2 (fr) | 2009-07-10 | 2011-01-12 | Manufacture et fabrique de montres et chronomètres Ulysse Nardin Le Locle SA | Oscillateur mécanique |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CH421827A (de) * | 1964-07-31 | 1967-04-15 | Centre Electron Horloger | Mechanischer Resonator für Normalfrequenzoszillatoren in Zeitmessgeräten |
| CH496267A (fr) * | 1965-03-22 | 1970-05-29 | Movado Montres | Oscillateur à torsion pour pièce d'horlogerie |
| CH1385865A4 (fr) * | 1965-10-07 | 1967-11-30 | ||
| DE1815099A1 (de) * | 1968-12-17 | 1970-09-24 | Mauthe Gmbh Friedr | Oszillator als Gangordner von insbesondere elektrischen Uhren |
| US9201398B2 (en) * | 2010-07-19 | 2015-12-01 | Nivarox-Far S.A. | Oscillating mechanism with an elastic pivot and mobile element for transmitting energy |
| EP2703911B1 (fr) * | 2012-09-03 | 2018-04-11 | Blancpain SA. | Organe régulateur de montre |
-
2014
- 2014-07-14 EP EP14176918.2A patent/EP2975469B1/fr active Active
- 2014-07-14 CH CH01064/14A patent/CH709881A2/fr not_active Application Discontinuation
-
2015
- 2015-07-08 JP JP2015136645A patent/JP5982541B2/ja active Active
- 2015-07-09 US US14/795,448 patent/US9323222B2/en active Active
- 2015-07-13 RU RU2015128252/12A patent/RU2603571C1/ru active
- 2015-07-13 CN CN201510408822.8A patent/CN105319940B/zh active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3318087A (en) * | 1964-07-10 | 1967-05-09 | Movado And Manufacture Des Mon | Torsion oscillator |
| FR1502775A (fr) * | 1965-09-03 | 1967-11-24 | United States Time Corp | Procédé d'assemblage de ressort de résonateur, particulièrement destiné à un chronomètre |
| EP2273323A2 (fr) | 2009-07-10 | 2011-01-12 | Manufacture et fabrique de montres et chronomètres Ulysse Nardin Le Locle SA | Oscillateur mécanique |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWI745330B (zh) * | 2016-01-29 | 2021-11-11 | 瑞士商伊塔瑞士鐘錶製造公司 | 時計共振器機構、時計機芯及手錶 |
| EP3276431A1 (fr) * | 2016-07-27 | 2018-01-31 | Cartier International AG | Oscillateur mécanique pour mouvement d'horlogerie |
| EP3792700A1 (fr) * | 2019-09-16 | 2021-03-17 | Patek Philippe SA Genève | Oscillateur horloger a pivot flexible |
| EP4163735A1 (fr) | 2021-10-05 | 2023-04-12 | Patek Philippe SA Genève | Procédés de réalisation et de réglage d'un oscillateur a guidage flexible et mouvement horloger comprenant un tel oscillateur |
| WO2025012772A1 (fr) * | 2023-07-13 | 2025-01-16 | Patek Philippe Sa Geneve | Mécanisme horloger |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2975469B1 (fr) | 2017-07-05 |
| US9323222B2 (en) | 2016-04-26 |
| CN105319940B (zh) | 2017-08-18 |
| RU2603571C1 (ru) | 2016-11-27 |
| JP5982541B2 (ja) | 2016-08-31 |
| CH709881A2 (fr) | 2016-01-15 |
| CN105319940A (zh) | 2016-02-10 |
| JP2016020906A (ja) | 2016-02-04 |
| US20160011566A1 (en) | 2016-01-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2975469B1 (fr) | Guidage flexible horloger | |
| EP2273323B1 (fr) | Oscillateur mécanique | |
| EP2975470B1 (fr) | Guidage flexible horloger | |
| EP3548973B1 (fr) | Dispositif pour pièce d'horlogerie, mouvement horloger et pièce d'horlogerie comprenant un tel dispositif | |
| EP3356690A1 (fr) | Composant mécanique à pivot flexible et dispositif horloger le comprenant | |
| EP2952971B1 (fr) | Ancre pour mécanisme d'échappement d'un mouvement de montre | |
| EP2908187B1 (fr) | Régulation d'un résonateur d'horlogerie par action sur la longueur active d'un spiral | |
| EP3040783B1 (fr) | Sous-ensemble pour un mécanisme de réglage d'une vitesse dans un mouvement horloger et un tel mécanisme | |
| EP4075647B1 (fr) | Dispositif électromagnétique de conversion d'une énergie mécanique en une énergie électrique | |
| CH713790B1 (fr) | Mécanisme pour pièce d'horlogerie, mouvement horloger et pièce d'horlogerie comprenant un tel mécanisme. | |
| EP2506093B1 (fr) | Balancier pour mouvement d'horlogerie | |
| FR3071075B1 (fr) | Dispositif pour piece d'horlogerie, mouvement horloger et piece d'horlogerie comprenant un tel dispositif | |
| CH714030A2 (fr) | Oscillateur d'horlogerie à guidages flexibles à grande course angulaire. | |
| FR3048792B1 (fr) | Dispositif pour piece d'horlogerie, mouvement horloger et piece d'horlogerie comprenant un tel dispositif | |
| EP3615470B1 (fr) | Procédé de fabrication d'un oscillateur horloger | |
| CH713791B1 (fr) | Micro mécanisme à réglage de position, mouvement horloger et pièce d'horlogerie comprenant un tel mécanisme. | |
| EP3637196A1 (fr) | Oscillateur mécanique | |
| EP3117514A1 (fr) | Dispositif piezoelectrique de generation de tension electrique | |
| EP3489763A1 (fr) | Ancre pour echappement d'un mouvement horloger | |
| WO2025051637A1 (fr) | Mecanisme d'echappement d'un mouvement horloger et pièce d'horlogerie associée | |
| WO2024141600A1 (fr) | Système réglant pour mouvement horloger | |
| HK1222000A1 (zh) | 柔性钟表引导件 | |
| HK1222000B (en) | Flexible timepiece guidance | |
| HK1219138A1 (zh) | 柔性钟表引导件 | |
| HK1219138B (en) | Flexible timepiece guidance |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| 17P | Request for examination filed |
Effective date: 20160720 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20170222 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP Ref country code: CH Ref legal event code: NV Representative=s name: ICB INGENIEURS CONSEILS EN BREVETS SA, CH |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 907005 Country of ref document: AT Kind code of ref document: T Effective date: 20170715 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 4 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: FRENCH |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602014011423 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20170705 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 907005 Country of ref document: AT Kind code of ref document: T Effective date: 20170705 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170705 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171005 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170705 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170705 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170705 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170705 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170705 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171105 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171005 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170705 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170705 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170705 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170705 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171006 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602014011423 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170705 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170705 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170705 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170705 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170714 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170705 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170705 Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170705 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170705 |
|
| 26N | No opposition filed |
Effective date: 20180406 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20170731 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 5 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170714 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170705 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170705 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20140714 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170705 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170705 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170705 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170705 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170705 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230611 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20250619 Year of fee payment: 12 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20250619 Year of fee payment: 12 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20250620 Year of fee payment: 12 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 20250801 Year of fee payment: 12 |