EP2749376B1 - Power tool having rotary input control - Google Patents
Power tool having rotary input control Download PDFInfo
- Publication number
- EP2749376B1 EP2749376B1 EP13198640.8A EP13198640A EP2749376B1 EP 2749376 B1 EP2749376 B1 EP 2749376B1 EP 13198640 A EP13198640 A EP 13198640A EP 2749376 B1 EP2749376 B1 EP 2749376B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- tool
- housing
- motor
- controller
- rotational
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000006073 displacement reaction Methods 0.000 claims description 67
- 230000033001 locomotion Effects 0.000 claims description 61
- 230000007246 mechanism Effects 0.000 claims description 24
- 238000000034 method Methods 0.000 description 38
- 230000006870 function Effects 0.000 description 14
- 230000002441 reversible effect Effects 0.000 description 12
- 230000001133 acceleration Effects 0.000 description 11
- 230000008859 change Effects 0.000 description 9
- 230000003534 oscillatory effect Effects 0.000 description 9
- 230000005540 biological transmission Effects 0.000 description 8
- 238000005259 measurement Methods 0.000 description 8
- 230000010355 oscillation Effects 0.000 description 8
- 230000000694 effects Effects 0.000 description 7
- 230000014759 maintenance of location Effects 0.000 description 7
- 210000003811 finger Anatomy 0.000 description 5
- 210000000707 wrist Anatomy 0.000 description 4
- 230000009471 action Effects 0.000 description 3
- 230000006835 compression Effects 0.000 description 3
- 238000007906 compression Methods 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 238000012544 monitoring process Methods 0.000 description 3
- 238000003825 pressing Methods 0.000 description 3
- 230000000881 depressing effect Effects 0.000 description 2
- 238000005286 illumination Methods 0.000 description 2
- 238000009987 spinning Methods 0.000 description 2
- 210000003813 thumb Anatomy 0.000 description 2
- 230000007704 transition Effects 0.000 description 2
- 229910001369 Brass Inorganic materials 0.000 description 1
- 206010023230 Joint stiffness Diseases 0.000 description 1
- 241000321728 Tritogonia verrucosa Species 0.000 description 1
- 230000003213 activating effect Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000000712 assembly Effects 0.000 description 1
- 238000000429 assembly Methods 0.000 description 1
- 230000006399 behavior Effects 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000004397 blinking Effects 0.000 description 1
- 239000010951 brass Substances 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 230000000994 depressogenic effect Effects 0.000 description 1
- 230000001627 detrimental effect Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 230000005669 field effect Effects 0.000 description 1
- 238000007667 floating Methods 0.000 description 1
- 231100001261 hazardous Toxicity 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 238000012886 linear function Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000002035 prolonged effect Effects 0.000 description 1
- 239000002023 wood Substances 0.000 description 1
Images


































Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25B—TOOLS OR BENCH DEVICES NOT OTHERWISE PROVIDED FOR, FOR FASTENING, CONNECTING, DISENGAGING OR HOLDING
- B25B21/00—Portable power-driven screw or nut setting or loosening tools; Attachments for drilling apparatus serving the same purpose
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25B—TOOLS OR BENCH DEVICES NOT OTHERWISE PROVIDED FOR, FOR FASTENING, CONNECTING, DISENGAGING OR HOLDING
- B25B23/00—Details of, or accessories for, spanners, wrenches, screwdrivers
- B25B23/14—Arrangement of torque limiters or torque indicators in wrenches or screwdrivers
Definitions
- the present invention relates generally to power tools, such as a power screwdriver, and, more particularly, to a control scheme that controls rotation of an output member of a tool based on rotary user input.
- users may control tool output through the use of an input switch.
- This can be in the form of a digital switch in which the user turns the tool on with full output by pressing a button and turns the tool off by releasing the button. More commonly, it is in the form of an analog trigger switch in which the power delivered to the tool's motor is a function of trigger travel.
- the user grips the tool and uses one or more fingers to actuate the switch. The user's finger must travel linearly along one axis to control a rotational motion about a different axis. This makes it difficult for the user to directly compare trigger travel to output rotation and to make quick speed adjustments for finer control.
- Another issue with this control method is the difficulty in assessing joint tightness. As a joint becomes tighter, the fastener becomes more reluctant to move farther into the material. Because the tool motor attempts to continue spinning while the output member slows down, a reactionary torque can be felt in the user's wrist as the user increases bias force in an attempt to keep the power tool stationary. In this current arrangement, the user must first sense tightness with the wrist before making the appropriate control adjustment with the finger.
- the present invention provides a power tool in accordance with Claim 1.
- Preferred features of the invention are defined and described in the dependant claims.
- an exemplary power screwdriver is indicated generally by reference number 10.
- the screwdriver 10 is comprised generally of an output member 11 configured to rotate about a longitudinal axis 8 and a motor 26 driveably connected to the output member 11 to impart rotary motions thereto.
- Tool operation is controlled by a trigger switch, a rotational rate sensor and a controller in a manner further described below.
- a chuck or some other type of tool holder may be affixed to the end of the output member 11. Further details regarding an exemplary bit holder are set forth in U.S. patent application Ser. No. 12/394,426 which is incorporated herein by reference.
- Other components needed to construct the screwdriver 10 are further described below. While the following description is provided with reference to screwdriver 10, it is readily understood that the broader aspects of the present disclosure are applicable to other types of power tools, including but not limited to tools having elongated housings aligned concentrically with the output member of the tool.
- the housing assembly for the screwdriver 10 is preferably further comprised of a first housing portion 12 and a second housing portion 14.
- the first housing portion 12 defines a handle for the tool and can be mounted to the second housing portion 14.
- the first housing portion 12 is rotatable in relation to the second housing portion 14.
- the first and second housing portions 12, 14 are aligned with each other along the longitudinal axis of the tool as shown in FIG. 1 This arrangement is referred to herein as an "inline" configuration.
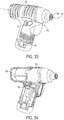
- the screwdriver 10 may be further configured into a "pistol-type" arrangement as shown in FIG. 3 .
- This second arrangement is achieved by depressing a rotation release mechanism 130 located in the side of the second housing portion 14.
- the first housing portion 12 will rotate 180 degrees in relation to the second housing portion 14, thereby resulting in the "pistol-type” arrangement.
- the first and second housing portions 12, 14 form a concave elongated groove 6 that extends from one side of the tool continuously around the back to the other side of the tool.
- the first housing portion 12 can be formed from a pair of housing shells 41, 42 that can cooperate to define an internal cavity 43.
- the internal cavity 43 is configured to receive a rechargeable battery pack 44 comprised of one or more battery cells.
- a circuit board 45 for interfacing the battery terminals with other components is fixedly mounted in the internal cavity 43 of the first housing portion 12.
- the trigger switch assembly 50 is also pivotably coupled to the first housing portion 12.
- the second housing portion 14 can be formed of a pair of housing shells 46, 47 that can cooperate to define another internal cavity 48.
- the second housing portion 14 is configured to receive the powertrain assembly 49 which includes the motor 26, the transmission, and the output member 11.
- the power train assembly 49 can be mounted in the internal cavity 48 such that a rotational axis of the output member is disposed concentrically about the longitudinal axis of the second housing portion 14.
- One or more circuit boards 45 are also fixedly mounted in the internal cavity 48 of the second housing portion 14 (as shown in FIG. 14A ). Components mounted to the circuit board may include the rotational rate sensor 22, the microcontroller 24 as well as other circuitry for operating the tool.
- the second housing portion 14 is further configured to support the rotation release mechanism 130.
- the rotary release mechanism 130 can be mounted in either the first or second housing portions 12, 14.
- the release mechanism 130 comprises a lock bar assembly 140 that engages with a set of locking features 132 associated with the other one of the first and second housing portions.
- the lock bar assembly 140 is slidably mounted inside the second housing portion 14.
- the lock bar assembly 140 is positioned preferably so that it may be actuated by the thumb of a hand gripping the first housing portion 12 of the tool.
- Other placements of the lock bar assembly and/or other types of lock bar assemblies are also contemplated. Further details regarding another lock bar assembly is found in U.S. patent application Ser. No. 12/783,850 which was filed on May 20, 2010 and is incorporated herein by reference.
- the lock bar assembly 140 is comprised of a lock bar 142 and a biasing system 150.
- the lock bar 142 is further defined as a bar body 144, two push members 148 and a pair of stop members 146.
- the push members 148 are integrally formed on each end of the bar body 144.
- the bar body 144 can be an elongated structure having a pocket 149 into which the biasing system 150 is received.
- the pocket 149 can be tailored to the particular configuration of the biasing system.
- the biasing system 150 is comprised of two pins 152 and a spring 154. Each pin 152 is inserted into opposing ends of the spring 154 and includes an integral collar that serves to retain the pin in the pocket. When placed into the pocket, the other end of each pin protrudes through an aperture formed in an end of the bar body with the collar positioned between the inner wall of the pocket and the spring.
- the stop members 146 are disposed on opposite sides of the bar body 144 and integrally formed with the bar body 144.
- the stop members 146 can be further defined as annular segments that extend outwardly from a bottom surface of the bar body 144.
- the stop members 146 are arranged to engage the set of locking features 132 that are integrally formed on the shell assembly of the first housing portion 12 as best seen in FIG. 14A .
- the biasing system 150 operates to bias the lock bar assembly 140 into the locking position. In this locking position, the engagement of the stop members 146 with the locking features 132 prevents the first housing portion from being rotated in relation to the second housing portion.
- the push members 148 protrude through a push member aperture formed on each side of the second housing portion 14.
- the stop members 146 slide out of engagement with the locking features 132 as shown in FIG. 14B , thereby enabling the first housing portion to rotate freely in relation to the second housing portion.
- the push members 148 are offset from the center axis on which the first housing portion 12 and the second housing portion 14 rotate with respect to one another. This arrangement creates an inertial moment that helps to rotate the second housing portion 14 in relation to the first housing portion 12. With a single actuating force, the tool operator can release the lock bar assembly 140 and continue rotating the second housing portion.
- the user can then continue to rotate the second housing portion.
- the user can then continue to rotate the second housing portion (e.g., 180 degrees) until the stop members re-engage the locking features.
- the biasing system 150 biases the lock bar assembly 140 into a locking position as shown in FIG. 14C .
- tool rotation is used to control rotation of the output member.
- rotational motion of the tool about the longitudinal axis of the output member is monitored using the rotational motion sensor disposed in the power tool.
- the angular velocity, angular displacement, and/or direction of rotation can be measured and used as a basis for driving the output member.
- the resulting configuration improves upon the shortcomings of conventional input schemes.
- the control input and the resulting output occur as a rotation about the axis. This results in a highly intuitive control similar to the use of a manual screwdriver.
- control input could be rotational about a different axis associated with the tool.
- control input could be about an axis offset but in parallel with the axis of the output member or even an axis askew from the axis of the output member. Further details regarding the control scheme may be found in U.S. Patent Application No. 61/292,966 which was filed on Jan. 7, 2010, and is incorporated herein by reference.
- the switch may be a single pole, single throw switch accessible on the exterior of the tool.
- the switch When the operator places the switch in an ON position, the tool is powered up (i.e., battery is connected to the controller and other electronic components). Rotational motion is detected and acted upon only when the tool is powered up.
- the switch When the operator places the switch in an OFF position, the tool is powered down and no longer operational.
- the tool operator actuates a trigger switch assembly 50 to initiate tool operation.
- the trigger switch assembly 50 is comprised primarily of an elongated casing 52 that houses at least one momentary switch 53 and a biasing member 54, such as a spring.
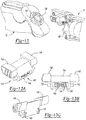
- the elongated casing 52 is movably coupled to the first housing portion 12 in such a way that allows it to translate and/or pivot about any point of contact by the operator. For example, if the tool operator presses near the top or bottom of the elongated casing 52, the trigger switch assembly 50 pivots as shown in FIGS. 5A and 5B , respectively.
- the trigger switch assembly 50 is translated inward towards the tool body as shown in FIG. 5C .
- the force applied to the elongated casing 52 by the operator will depress at least one of the switches from an OFF position to an ON position.
- the switches 53 are arranged electrically in parallel with each other (as shown in FIG. 7 ) such that only one of the switches needs to be actuated to power up the tool.
- the biasing member 54 biases the elongated casing 52 away from the tool, thereby returning each of the switches to an OFF position.
- the trigger switch assembly 50 may be comprised of more than two switches 53 and/or more than one biasing member 54 as shown in FIGS. 6A-6C .
- FIG. 16 illustrates an alternative trigger switch assembly 50, where like numerals refer to like parts.
- Elongated casing 52 is preferably captured by the first housing portion 12 so that it can only slide in one particular direction A.
- Elongated casing 52 may have ramps 52R.
- Ramps 52R engage cams 55R on a sliding link 55.
- Sliding link 55 is captured by the first housing portion 12 so that it can preferably only slide in along a direction B substantially perpendicular to direction A.
- Sliding link 55 is preferably rotatably attached to rotating link 56.
- Rotating link 56 may be rotatably attached to the first housing portion 12 via a post 56P.
- elongated casing 52 contacts springs 54 which bias elongated casing 52 in a direction opposite to direction A.
- sliding link 55 may contact springs 55S which bias sliding link 55 in a direction opposite to direction B.
- rotating link 56 may contact a spring 56S that biases rotating link 56 away from momentary switch 53.
- switch 53 can be disposed away from elongated casing 52, motor 26 can be provided adjacent to elongated casing 52 and sliding link 55, allowing for a more compact arrangement.
- FIGS. 17A-17B illustrate one such an alternative switch assembly, where like numerals refer to like parts.
- a power train assembly 49 as shown in FIG. 4 which includes motor 26, the output member 11 and/or any transmission there between, is preferably encased in a housing 71 and made to translate axially inside the first housing portion 12.
- a spring 72 of adequate stiffness biases the drivetrain assembly 71 forward in the tool housing.
- a momentary pushbutton switch 73 is placed in axial alignment with the drivetrain assembly 71.
- the drivetrain assembly remains stationary but a collar 74 surrounding the bit is made to translate axially and actuate a switch.
- Other arrangements for actuating the switch are also contemplated.
- the battery 28 is connected via power-regulating circuits to the rotational motion sensor, the controller 24, and other support electronics.
- the controller 24 immediately turns on a bypass switch 34 (e.g., FET). This enables the tool electronics to continue receiving power even after the pushbutton is released.
- the spring 72 again biases the drivetrain assembly 71 forward and the pushbutton 73 is released.
- the controller 24 will remain powered for a predetermined amount of time (e.g., 10 seconds) after the pushbutton 73 is released.
- the tool may be applied to the same or different fastener without the tool being powered down.
- the controller 24 will turn off the bypass switch 34 and power down the tool. It is preferable that there is some delay between a desired tool shut down and powering down the electronics. This gives the driver circuit time to brake the motor to avoid motor coasting.
- actuation of pushbutton 73 also serves to reset (i.e., set to zero) the angular position. Powering the electronics may be controlled by the pushbutton or with a separate switch. Batteries which are replaceable and/or rechargeable serve as the power source in this embodiment, although the concepts disclosed herein as also applicable to corded tools.
- the operational state of the tool may be conveyed to the tool operator by a light emitting diode 35 (LED) that will be illuminated while the tool is powered-up.
- the LED 35 may be used to indicate other tool conditions. For example, a blinking LED 35 may indicate when a current level has been exceeded or when the battery is low. In an alternative arrangement, LED 35 may be used to illuminate a work surface.
- multiple LEDs may be used to indicate the direction and speed of tool operation.
- three side-by-side LEDs 35 can be lit consecutively one at a time from left to right when the output member 11 is rotating in a clockwise direction and from right to left when output member 11 is rotating in a counterclockwise direction.
- the duration of illumination, or blink rate may indicate the speed of operation, where the longer each LED is lit, the slower the operation speed.
- the LEDs 35 should to reflect this transition.
- the LEDs 35 could all be lit simultaneously for a brief period when the tool's rotation passes back through the starting or reference point to indicate the change.
- the LEDs 35 might turn off or return to showing battery life or some other status. If the user continues to rotate the tool in the opposite direction, the LEDs 35 would resume consecutive illumination and blink rate based on direction and speed of rotation.
- Other alternative embodiments could include more or fewer LEDs used as described above.
- the direction of rotation of output member 11 might be indicated by one LED arrow.
- the arrow may change color based on speed, for example, from green to yellow to orange to red. The speed could also be indicated by the arrow's blink rate.
- the tool may be powered up but not engaged with a fastener.
- the controller may be further configured to drive the output member only when the pushbutton switch 73 is actuated.
- the output member is driven only when the tool is engaged with a fastener and a sufficient bias force is applied to the drivetrain assembly.
- Control algorithm may allow for a lesser bias force when a fastener is being removed.
- the output member may be driven in a reverse direction when a sufficient bias load is applied to the drivetrain assembly as described above. Once the output member begins rotating, it will not shut off (regardless of the bias force) until some forward rotation is detected.
- Non-contacting sensing methods may also be used to control operation of the tool.
- a non-contact sensor 170 may be disposed on the forward facing surface 174 of the tool adjacent to the bit 178 as shown in FIG. 17C .
- the non-contact sensor 170 may be used to sense when the tool is approaching, being applied to, or withdrawing from a workpiece.
- Optic or acoustic sensors are two exemplary types of non-contact sensors.
- an inertial sensor such as an accelerometer, can be configured to sense the relative position or acceleration of the tool.
- an inertial sensor can detect linear motion of the tool towards or away from a workpiece along the longitudinal axis of the tool. This type of motion is indicative of engaging a workpiece with the tool or removing the tool after the task is finished.
- one sensing method may be used for startup while another is used for shutdown. Methods that respond to force applied to the workpiece may be preferred for determining when to start up the tool, while methods that sense the state of the fastener or movement of the tool away from the application may be preferred for determining when to modify tool output (e.g., shut down the tool).
- Components residing in the housing of the screwdriver 10 include a rotational rate sensor 22, which may be spatially separated in a radial direction from the output member as well as a controller 24 electrically connected to the rotational rate sensor 22 and a motor 26 as further illustrated schematically in FIG. 7 .
- a motor drive circuit 25 enables voltage from the battery to be applied across the motor in either direction.
- the motor 26 in turn drivably connects through a transmission (not shown) to the output member 11.
- the motor drive circuit 25 is an H-bridge circuit arrangement although other arrangements are contemplated.
- the screwdriver 10 may also include a temperature sensor 31, a current sensor 32, a tachometer 33 and/or a LED 35. Although a few primary components of the screwdriver 10 are discussed herein, it is readily understood that other components may be needed to construct the screwdriver.
- rotational motion sensor 22 is further defined as a gyroscope.
- the operating principle of the gyroscope is based on the Coriolis effect.
- the rotational rate sensor is comprised of a resonating mass.
- the resonating mass When the power tool is subject to rotational motion about the axis of the spindle, the resonating mass will be laterally displaced in accordance with the Coriolis effect, such that the lateral displacement is directly proportional to the angular rate. It is noteworthy that the resonating motion of the mass and the lateral movement of the mass occur in a plane which is oriented perpendicular to the rotational axis of the rotary member.
- Capacitive sensing elements are then used to detect the lateral displacement and generate an applicable signal indicative of the lateral displacement.
- Exemplary rotational rate sensors include the ADXRS150 or ADSRS300 gyroscope devices commercially available from Analog Devices, or the ISZ-650 or IXZ-2500 gyroscope devices commercially available from InvenSense, Inc. It is readily understood that accelerometers, compasses, inertial sensors and other types of rotational motion sensors are contemplated by this disclosure. It is also envisioned that the sensor as well as other tool components may be incorporated into a battery pack or any other removable pieces that interface with the tool housing.
- the rotational motion sensor 22 monitors rotational motion of the sensor with respect to the longitudinal axis of the output member 11.
- a control module implemented by the controller 24 receives input from the rotational motion sensor 22 and drives the motor 26 and thus the output member 11 based upon input from the rotational motion sensor 22.
- the control module may drive the output member 11 in the same direction as the detected rotational motion of the tool.
- module may refer to, be part of, or include an Application Specific Integrated Circuit (ASIC); an electronic circuit; a combinational logic circuit; a field programmable gate array (FPGA); a processor (shared, dedicated, or group) that executes code; other suitable components that provide the described functionality; or a combination of some or all of the above, such as in a system-on-chip.
- ASIC Application Specific Integrated Circuit
- FPGA field programmable gate array
- module may include memory (shared, dedicated, or group) that stores code executed by the processor, where code, as used above, may include software, firmware, and/or microcode, and may refer to programs, routines, functions, classes, and/or objects.
- angular displacement may be monitored by the controller 24 based upon input received from the rotational motion sensor 22.
- step 81 a starting or reference point ( ⁇ ) is initialized to zero. Any subsequent angular displacement of the tool is then measured in relation to this reference.
- the control scheme is implemented as computer executable instructions residing in a memory and executed by a processor of the controller 24.
- the user may wish to reset the starting or reference point ( ⁇ ).
- the user's wrist may be rotated 40° clockwise, and the user wants to reverse the direction of the tool's operation. Instead of rotating back through the reference point and continuing to rotate to the left, the user may reset the reference point to be the current position (in this example, 40° clockwise). Any subsequent counterclockwise rotation from the new reference point will reverse the direction of the rotation of output member 11.
- the second exemplary embodiment where holding in the trigger switch assembly 50 is how the tool remains in a powered-up state, releasing the trigger switch assembly 50 would reset the reference point.
- pressing the dedicated zero button 210 would reset the reference point.
- Persons skilled in the art will recognize that other implementations can be envisioned, such as requiring the zero button 210 to be pressed and held for a short period of time in order to prevent accidental zeroing.
- Angular displacement of the tool is then monitored at step 82.
- the angular displacement is derived from the rate of angular displacement over time or angular velocity ( ⁇ TOOL ) as provided by the gyroscope.
- ⁇ TOOL angular velocity
- the rotational rate sensor described above is presently preferred for determining angular displacement of the tool, it is readily understood that this disclosure is not limited to this type of sensor. On the contrary, angular displacement may be derived in other manners and/or from other types of sensors.
- the signal from any rotational rate sensor can be filtered in the analog domain with discrete electrical components and/or digitally with software filters.
- the motor is driven at different rotational speeds depending upon the amount of rotation. For example, the angular displacement is compared at 84 to an upper threshold. When the angular displacement exceeds an upper threshold ⁇ UT (e.g., 30° of rotation), then the motor is driven at full speed as indicated at 85. The angular displacement is also compared at 86 to a lower threshold. When the angular displacement is less than the upper threshold but exceeds a lower threshold ⁇ LT (e.g., 5° of rotation), then the motor is driven at half speed as indicated at 87. It is readily understood that the control scheme may employ more or less displacement thresholds as well as drive the motor at other speeds.
- ⁇ UT e.g. 30° of rotation
- Angular displacement continues to be monitored at step 82. Subsequent control decisions are based on the absolute angular displacement in relation to the starting point as shown at 83.
- the operating speed of the motor is maintained. In this way, continuous operation of the tool is maintained until the tool is returned to its original position.
- returning the tool to its original position means that the user returns the tool to within 10° to 15° of the original position, for example. This creates a range around the reference point that allows for a small margin of user error. The user is not required to find the exact reference point that was set.
- the output of the tool is modified at 190.
- the voltage applied to the motor is discontinued at 190, thereby terminating operation of the tool.
- the speed at which the motor is driven is reduced to some minimal level that allows for spindle rotation at no load.
- Threshold values may include hysteresis; that is, the lower threshold is set at one value (e.g. six degrees) for turning on the motor but set at a different value (e.g., four degrees) for turning off the motor, for example. It is also to be understood that only the relevant steps of the methodology are discussed in relation to FIG. 8A , but that other functionality may be needed to control and manage the overall operation of the system.
- FIGS. 8B A variant of this control scheme 80' is shown in FIGS. 8B .
- the motor speed may be set generally as a function of the angular displacement as indicated at 87'. More specifically, the motor speed may be set proportional to the full speed. In this example, the motor speed is derived from a linear function. It is also noted that more complex functions, such as quadratic, exponential or logarithmic functions, may be used to control motor speed. In another embodiment, the motor speed could be proportional to the displacement, velocity, acceleration, or a combination thereof (as shown in FIG. 8B , step 87').
- direction of tool rotation may be used to control the rotational direction of the output member.
- a clockwise rotation of the tool results in a clockwise rotation of the output member
- a counterclockwise rotation of the tool results in a counterclockwise rotation of the output member.
- the tool may be configured with a switch that enables the operator to select the rotational direction of the output member.
- rotational motion sensor 22 can be used in diverse ways.
- the motion sensor 22 can be used to detect fault conditions and terminate operation.
- One such scheme is shown in FIG. 8C where, if the angular displacement is larger than the upper threshold ⁇ u (step 86), it could be advantageous to check whether the angular displacement exceeds on a second upper threshold ⁇ OT (step 88). If such threshold is exceeded, then operation of screwdriver 10 can be terminated (step 89).
- Such arrangement is important in tools that should not be inverted or put in certain orientations. Examples of such tools include table saws, power mowers, etc.
- operation of screwdriver 10 can be terminated if motion sensor 22 detects a sudden acceleration, such as when a tool is dropped.
- control schemes in FIGS. 8A-8C can be modified by monitoring angular velocity of output member 11 about the longitudinal axis 8 instead of angular displacement.
- an upper threshold such as 100°/second
- a lower threshold such as 50°/second
- control schemes shown in FIGS. 8A-8C can be modified by monitoring angular acceleration instead of angular velocity.
- an upper threshold such as 100°/ second per second
- a lower threshold such as 50°/ second per second
- a combination of displacement, velocity, and/or acceleration could determine the control scheme.
- a ratcheting control scheme 60 is also contemplated by this disclosure.
- the controller monitors angular displacement of the tool at 61 based upon input received from the rotational motion sensor 22. From angular displacement, the controller is able to determine the direction of the displacement at 62 and drive the motor 26 to simulate a ratchet function as further described below.
- the controller must also receive an indication from the operator at 63 as to which direction the operator desires to ratchet.
- the screwdriver 10 may be configured with a switch that enables the operator to select between forward and reverse ratchet directions.
- Other input mechanisms are also contemplated.
- the controller drives the motor in the following manner.
- the output member is driven at a higher ratio than the rotation experienced by the tool.
- the output member may be driven one or more full revolutions for each quarter turn of the tool by the operator.
- the output member is rotated at a ratio greater than one when the direction of rotational motion is the same as a user selected ratcheting direction as indicated at 65. It may not be necessary for the user to select a ratchet direction. Rather the control may make a ratcheting direction decision based on a parameter, for example, an initial rotation direction is assumed the desired forward direction.
- the output member is driven at a one-to-one ratio.
- the output member is rotated at a ratio equal to one when the direction rotational motion is the opposite the user selected ratcheting direction as indicated at 67.
- the bit and screw would remain stationary as the user twists the tool backward to prepare for the next forward turn, thereby mimicking a ratcheting function.
- FIG. 9 illustrates three exemplary control curves.
- Curve A is a linear control curve in which there is a large variable control region. If the user does not need fine control for the application and simply wants to run an application as fast as possible, the user would prefer curve B. In this curve, the tool output ramps up and obtains full output quickly. If the user is running a delicate application, such as seating a brass screw, the user would prefer curve C. In this curve, obtaining immediate power is sacrificed to give the user a larger control region. In the first part of the curve, output power changes slowly; whereas, the output power changes more quickly in the second part of the curve.
- the tool may be programmed with two or more control curves.
- the tool operator may select one of a set number of control curves directly with an input switch.
- the controller applies the control curve indicated by the input switch until the tool operator selects a different control curve.
- the controller of the tool can select an applicable control curve based on an input control variable (ICV) and its derivative.
- ICVs include displacement, velocity, and acceleration.
- the motor speed from the selected curve may be determined by either the same or some other variable.
- the controller may select the control curve based on distance a trigger has traveled and the speed at which the user actuates the trigger switch. In this example, the selection of the control curve is not made until the trigger has traveled some predetermined distance (e.g., 5% of the travel range as shown in FIG. 9A ) as measured from a starting position.
- the controller computes the speed of the trigger and selects a control curve from a group of control curves based on the computed speed. If the user simply wants to drive the motor as quick as possible, the user will tend to pull the trigger quickly. For this reason, if the speed of trigger exceeds some upper speed threshold, the controller infers that the user wants to run the motor as fast as possible and selects an applicable control curve (e.g., Curve B in FIG. 9A ). If the user is working on a delicate application and requires more control, the user will tend to pull the trigger more slowly.
- an applicable control curve e.g., Curve B in FIG. 9A
- the controller infers the user desires more control and selects a different control curve (e.g., Curve C in FIG. 9A ). If the speed of the trigger falls between the upper and lower thresholds, the controller may select another control curve (e.g., Curve A in FIG. 9A ). Curve selection could be (but is not limited to being) performed with every new trigger pull, so the user can punch the trigger to run the screw down, release, and obtain fine seating control with the next slower trigger pull.
- Curve selection could be (but is not limited to being) performed with every new trigger pull, so the user can punch the trigger to run the screw down, release, and obtain fine seating control with the next slower trigger pull.
- the controller then controls the motor speed in accordance with the selected control curve.
- the distance travelled by the trigger correlates to a percent output power. Based on the trigger distance, the controller will drive the motor at the corresponding percent output in accordance with the selected control curve. It is noted that this output could be motor pulse width modulation, as in an open loop motor control system, or it could be motor speed directly, as in a closed loop motor control system.
- the controller may select the control curve based on a different input control variable, such as the angular distance the tool has been rotated from a starting point and its derivative, i.e., the angular velocity at which the tool is being rotated. Similar to trigger speed, the controller can infer that the user wants to run the motor as fast as possible when the tool is rotated quickly and infer that the user wants to run the motor slower when the tool is being rotated slowly. Thus, the controller can select and apply a control curve in the manner set forth above. In this example, the percentage of the input control variable is computed in relation to a predefined range of expected rotation (e.g., +/- 180 degrees). Selecting an applicable control curve based on another type of input control variable land its derivative is also contemplated by this disclosure.
- a different input control variable such as the angular distance the tool has been rotated from a starting point and its derivative, i.e., the angular velocity at which the tool is being rotated. Similar to trigger speed, the controller can infer that the
- the controller may compute trigger speed and select a suitable control curve after the trigger has been released or otherwise begins traveling towards its starting position.
- FIG. 9B illustrates three exemplary control curves that can be employed during such a back-off condition.
- Curve D is a typical back off curve which mimics the typical ramp up curve, such as Curve A. In this curve, the user passes through the full range of analog control before returning to trigger starting position.
- Curve E is an alternative curve for faster shutoff. If the trigger is released quickly, the controller infers that the user simply wants to shut the tool off and allows the user to bypass most of the variable speed region.
- the controller infers that the user desires to enter the variable speed region. In this case, the controller may select and apply Curve F to allow the user better finish control, as would be needed to seat a screw. It is envisioned that the controller may monitor the input control variable and select an applicable control curve based on other types of triggering events which occur during tool operation.
- Ramp up curves may be combined with back off curves to form a single selectable curve as shown in FIG. 9C .
- the user wishes to use the tool to drive a long machine screw and thus selects the applicable control curves using the input switch as discussed above.
- the controller applies Curve B to obtain full tool output quickly.
- the controller applies Curve F, thereby giving the user more control and the ability to seat the screw to the desired tightness.
- Selection of control curves may be based on the input control variable in combination with other tool parameters.
- the controller may monitor output torque using known techniques such as sensing current draw. With reference to FIG. 9D , the controller has sensed a slow trigger release, thereby indicating the user desires variable speed for finish control. If the controller further senses that output torque is high, the controller can infer that the user needs more output power to keep the fastener moving (e.g., a wood screw application). In this case, the controller selects Curve G, where the control region is shifted upward to obtain a usable torque. On the other hand, if the controller senses that output torque is low, the controller can infer that additional output power is not needed (e.g., a machine screw application) and thus select Curve H. Likewise, the controller may select from amongst different control curves at tool startup based on the sensed torque. Tool parameters other than torque may also be used to select a suitable control curve.
- Selection of control curves can also be based on a second derivative of the input control variable.
- the controller can continually compute the acceleration of the trigger. When the acceleration exceeds some threshold, the controller may select a different control curve. This approach is especially useful if the tool has already determined a ramp up or back off curve but the user desires to change behavior mid curve. For example, the user has pulled the trigger slowly to allow a screw to gain engagement with a thread. Once engaged, the user punches the trigger to obtain full output. Since the tool always monitors trigger acceleration, the tool senses that the user is finished with variable speed control and quickly sends the tool into full output as shown in FIG. 9E .
- trigger input is used as an example in this scenario, but it should be noted that any user input control, such as a gesture, could be used as the input control variable.
- sensor 22 can detect when the user shakes a tool to toggle between control curves or even operation modes.
- a user can shake a sander to toggle between a rotary mode and a random orbit mode.
- the controller controls the motor speed in accordance with the same input control variable as is used to select the control curve. It is envisioned that the controller may control the motor speed with an input control variable that differs from the input control variable used to select the control curve.
- motor speed may be set based on displacement of the trigger; whereas, the control curve is selected in accordance with the velocity at which the trigger is actuated.
- the screwdriver 10 includes a current sensor 32 to detect current being delivered to the motor 26. It is disadvantageous for the motor of the tool to run at high current levels for a prolonged period of time. High current levels are typically indicative of high torque output.
- the controller is configured to modify tool output (e.g., shut down the tool) to prevent damage and signal to the operator that manually applied rotation may be required to continue advancing the fastener and complete the task.
- the tool may be further equipped with a spindle lock. In this scenario, the operator may actuate the spindle lock, thereby locking the spindle in fixed relation to the tool housing. This causes the tool to function like a manual screwdriver.
- the current sensor and controller may control the motor so that, at high torque levels, the power tool can be used as a simulated manual, ratcheting screwdriver.
- the controller monitors a current sense signal (I SENSE ) from the current sensor, where I SENSE indicates the amount of current being delivered to the motor.
- the controller compares I SENSE to a predetermined reference value I MAX , which indicates the maximum current that may be delivered to the motor.
- I MAX can be stored in memory and can be a fixed value or a user-selectable value. In many applications I SENSE and I MAX may correlate or be related to the output torque of the drive shaft. At step 806, if I SENSE does not exceed I MAX , then the controller continues to operate the power tool according to one of the control schemes set forth in Figs. 8A-8C .
- step 808 if I SENSE exceeds I MAX for a predetermined amount of time, then the controller causes a reduced, but non-zero, amount of power (LOW-PWM) to be delivered to the motor in the direction that the motor and output shaft were previously being driven.
- LOW-PWM is low enough so that the LOW-PWM signal cannot overcome the output torque being encountered by the tool shaft.
- I SENSE indicates that the current being delivered to the motor is greater than approximately 20 amps (e.g., approximately 25 amps) for at least 200 ms
- the controller operates to deliver a LOW-PWM signal to the motor that is less than approximately 20% (e.g., approximately 15%) of the maximum PWM duty cycle that was previously being delivered to the motor during normal operation. Therefore, if the user continues to rotate the tool housing in the driving direction of the motor, the user will need to manually apply a torque that is greater than the output torque, so that the tool functions as a manual screwdriver.
- the control scheme of FIG. 8D is not limited for use with the inertia control schemes of FIGS. 8A-8C , but can also be used with a more traditional electric power tool or screwdriver that is operated by a switch or trigger.
- the screwdriver 10 may be further configured to provide a user-perceptible output when the tool is operational. Providing the user with haptic feedback is one example of a user-perceptible output.
- the motor driven circuit 25 may be configured as an H-bridge circuit as noted above and in FIG. 7 .
- the H-bridge circuit is used to selectively open and close pairs of field effect transistors (FETs) to change the current flow direction and therefore the rotational direction of the motor.
- the motor By quickly transitioning back and forth between forward and reverse, the motor can be used to generate a vibration perceptible to the tool operator.
- the frequency of a vibration is dictated by the time span for one period and the magnitude of a vibration is dictated by the ratio of on time to off time as shown in FIG. 10 .
- Other schemes for vibrating the tool also fall within the broader aspects of this disclosure.
- the H-bridge circuit 25 (as seen in FIG. 7 ) may be driven in the manner described above before the angular displacement of the tool reaches the lower threshold. Consequently, the user is provided with haptic feedback when the spindle is not rotating. It is also envisioned that user may be provided haptic feedback while the spindle is rotating. For example, the positive and negative voltage may be applied to the motor with an imbalance between the voltages such that the motor will advance in either a forward or reverse direction while still vibrating the tool. It is understood that haptic feedback is merely one example of a perceptible output and other types of outputs also are contemplated by this disclosure.
- Vibrations having differing frequencies and/or differing magnitudes can also be used to communicate different operational states to the user.
- the magnitude of the pulses can be changed proportionally to speed to help convey where in a variable-speed range the tool is operating. So as not to limit the total tool power, this type of feedback may be dropped out beyond some variable speed limit (e.g., 70% of maximum speed).
- the vibrations may be used to warn the operator of a hazardous tool condition.
- the haptic feedback can be coupled with other perceptible indicators to help communicate the state of the tool to the operator. For instance, a light on the tool may be illuminated concurrently with the haptic feedback to indicate a particular state.
- haptic feedback can be used to indicate that the output member has rotated 360°, or that a particular desired torque setting has been achieved.
- an automated method for calibrating a gyroscope residing in the screwdriver 10.
- Vsense sensed-analog voltage
- ZRO offset error
- This offset error can be caused by different variants, such as mechanical stress on a gyroscope after mounting to a PCT or an offset error in the measuring equipment.
- the offset error is unique to each gyroscope but should remain constant over time. For this reason, calibration is often performed after a tool is assembled to determine the offset error.
- the offset error can be stored in memory and used when calculating the rotational rate (i.e., rate-(Vsense-Vref-ZRO/scale).
- FIG. 11 illustrates an exemplary method for calibrating the offset error of the gyroscope in the tool.
- the method is implemented by computer- executable instructions executed by a processor of the controller 24 in the tool.
- the calibration procedure must occur when the tool is stationary. This is likely to occur once an operation is complete and/or the tool is being powered down. Upon completing an operation, the tool will remain powered on for a predetermined amount of time. During this time period, the calibration procedure is preferably executed. It is understood that the calibration procedure may be executed at other times when the tool is or is likely to be stationary. For example, the first derivative of the sensed voltage measure may be analyzed to determine when the tool is stationary.
- the calibration procedure begins with a measure of the offset error as indicated at 114. After the offset error is measured, it is compared to a running average of preceding offset error measurements (ZROavg).
- the running average may be initially set to the current calibration value for the offset error.
- the measured offset error is compared at 115 to a predefined error threshold. If the absolute difference between the measured offset error and the running average is less than or equal to the predefined offset error threshold, the measured offset error may be used to compute a newly-calibrated offset error. More specifically, the measurement counter (calCount) may be incremented at 116 and the measured offset error is added to an accumulator (ZROaccum) at 117.
- the running average is then computed at 118 by dividing the accumulator by the counter.
- a running average is one exemplary way to compute the newly-calibrated offset error.
- the running average can be stored in memory at 121 as the newly-calibrated offset error and subsequently used by the controller during the calculations of the rotational rate.
- the tool When the absolute difference between the measured offset error and the running average exceeds the predefined offset error threshold, the tool must be rotating. In this case, the accumulator and measurement counter are reset as indicated at steps 126 and 127. The calibration procedure may continue to execute until the tool is powered down or some other trigger ends the procedure.
- the tool may employ a longer-term calibration scheme.
- the method set forth above determines whether or not there is a need to alter the calibration value.
- the longer-term calibration scheme would use a small amount of time (e.g., 0.25 s) to perform short-term calibrations, since errors would not be critical if no rotational motion is sensed in the time period.
- the averaged ZRO would be compared to the current calibration value. If the averaged ZRO is greater than the current calibration value, the controller would raise the current calibration value. If the averaged ZRO is less than the current calibration value, the controller would lower the current calibration value. This adjustment could either be incremental or proportional to the difference between the averaged value and the current value.
- While a tool body's uncontrolled spinning may not have a large effect on tool operation for trigger-controlled tools, it may have a prominent and detrimental effect for rotation-controlled tools. If the user controls tool output speed through the tool-body rotation, any undesired motion of the tool body could cause an undesired output speed. In the following scenario, it can even create an oscillation effect.
- the user rotates the tool clockwise in an attempt to drive a screw. If there is a great amount of backlash, the motor speed will increase rapidly until the backlash is taken up. If the user's grip is too relaxed at this point, the tool will spin uncontrolled in the counterclockwise direction. If the tool passes the zero rotation point and enters into negative rotation, the motor will reverse direction and spin counterclockwise. The backlash will again be taken up, eventually causing the tool body to spin uncontrolled in the clockwise direction. This oscillation or oscillatory state may continue until tool operation ceases.
- FIG. 15 depicts an exemplary method of preventing such an oscillatory state in the screwdriver 10.
- the method works cooperatively with the control scheme described in relation to FIG. 8A . It is understood that the method can be adapted to work with other control schemes, including those set forth above.
- the method is implemented by controller 24 in the tool.
- Rotational direction of the output spindle is dictated by the angular displacement of the tool as discussed above. For example, a clockwise rotation of the tool results in clockwise rotation of the output member. However, the onset of an oscillatory state may be indicated when tool rotation occurs for less than a predetermined amount of time before being rotated in the opposing direction. Therefore, upon detecting rotation of the tool, a time is initiated at 102. The timer accrues the amount of time the output member has been rotating in a given direction. Rotational motion of the tool and its direction are continually being monitored as indicated at 103.
- the method compares the value of the timer to a predefined threshold (e.g., 50 ms) at 104. If the value of the timer is less than the threshold, the onset of an oscillatory state may be occurring. In an exemplary embodiment, the oscillatory state is confirmed by detecting two oscillations although it may be presumed after a single oscillation. Thus, a flag is set at 105 to indicate the occurrence of a first oscillation. If the value of the timer exceeds the threshold, the change in rotational direction is presumed to be intended by the operator and thus the tool is not in an oscillating state. In either case, the timer value is reset and monitoring continues.
- a predefined threshold e.g. 50 ms
- a corrective action may be initiated as indicated at 107.
- the tool may be shut down for a short period of time (e.g., 1 ⁇ 4 second), thereby enabling the user to regain control of the tool before operation is resumed.
- a short period of time e.g. 1 ⁇ 4 second
- Other types of corrective actions are also contemplated by this disclosure. It is envisioned that the corrective action may be initiated after a single oscillation or some other specific number of oscillations exceeding two. Likewise, other techniques for detecting an oscillatory state fall within the broader aspects of this disclosure.
- the tool may be configured with self-locking planetary gear set 90 disposed between the output member 11 and a drive shaft 91 of the motor 26.
- the self-locking gear set could include any planetary gear set which limits the ability to drive the sun gear through the ring gear and/or limits the ability of the spindle to reverse. This limiting feature could be inherent in the planetary gear set or it could be some added feature such as a sprag clutch or a one way clutch.
- one inherent method to limit the ability of a ring gear to back drive a sun gear 92 is to add an additional ring gear 93 as the output of the planetary gear set 94 and fix the first ring gear 95. By fixing the first ring gear 95, power is transferred through the sun gear 92 into the planetary gear set 94 into the second (unfixed, out) ring gear 93.
- the advantage of having a self-locking planetary gear set is that when the motor is bogged down at high torque levels during twisting operations such as, but not limited to, threaded fasteners, the tool operator can overcome the torque by twisting the tool. This extra torque applied to the application from the tool operator is counteracted by the forces within the self-locking planetary gear set, and the motor does not back drive. This allows the tool operator to apply additional torque to the application.
- the controller when the sensed current exceeds some predefined threshold, the controller may be configured to drive the motor at some minimal level that allows for spindle rotation at no load. This avoids stressing the electronics in a stall condition but would allow for ratcheting at stall. The self-locking planetary gears would still allow the user to override stall torque manually. Conversely, when the user turns the tool in the reverse direction to wind up for the next forward turn, the spindle rotation would advance the bit locked in the screwhead, thereby counteracting the user's reverse tool rotation.
- a second exemplary power screwdriver is indicated generally by reference number 10'.
- This embodiment allows the user to hold the screwdriver 10' in the palm of the user's hand and actuate the trigger switch assembly 50' with the palm of the user's hand, most preferably the area of the palm that forms the base of the user's thumb.
- the tool operator actuates the trigger switch assembly 50' to initiate tool operation.
- the trigger switch assembly 50' is actuated and remains depressed just by holding the screwdriver 10'. This allows for natural and intuitive use, where the user can simply hold the screwdriver 10' and turn it.
- the trigger switch assembly 50' is substantially similar to the trigger switch assembly 50.
- the trigger switch assembly 50' is comprised primarily of an elongated casing 52 that houses at least one momentary switch 53 and a biasing member 54, such as a spring.
- the elongated casing 52 is movably coupled to housing 200 in such a way that allows it to translate and/or pivot about any point of contact by the operator. For example, if the tool operator presses near the top or bottom of the elongated casing 52, the trigger switch assembly 50' pivots as shown in FIGS. 5A and 5B , respectively.
- the trigger switch assembly 50' is translated inward towards the tool body as shown in FIG. 5C .
- the force applied to the elongated casing 52 by the operator will depress at least one of the switches from an OFF position to an ON position.
- the switches 53 are arranged electrically in parallel with each other (as shown in FIG. 7 ) such that only one of the switches needs to be actuated to power up the tool.
- the biasing member 54 biases the elongated casing 52 away from the tool, thereby returning each of the switches to an OFF position.
- the trigger switch assembly 50' may be comprised of more than two switches 53 and/or more than one biasing member 54 as shown in FIGS. 6A-6.C . This embodiment otherwise functions as described for the previous embodiment.
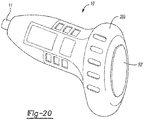
- a third exemplary power screwdriver is indicated generally by reference number 10".
- the tool operator actuates the trigger switch assembly 50" with the user's index finger to power up the screwdriver 10".
- the trigger switch assembly 50" functions as an ON/OFF switch. Once the user presses and releases the trigger switch assembly 50", the screwdriver 10" is in an ON state (i.e., the battery is connected to the controller and other electronic components). Rotational motion is detected and acted upon only when the tool is powered up. When the operator places the switch in an OFF position, the tool is powered down and is no longer operational. The screwdriver 10" remains in the ON state until the user turns it off by pressing and releasing the trigger switch assembly 50" again. It is also contemplated that the screwdriver 10" will automatically shut off after a period of inactivity, and the trigger switch assembly 50" may be implemented in other ways.
- Output member 11 rotates around longitudinal axis 8' based on angular displacement as described above. In other words, the user rotates the screwdriver 10" to drive output member 11.
- a zero button 210 allows the user to reset the starting or reference point as previously described.
- the tool may be further configured with a reaming tool 214 disposed between the second housing portion 14 and the output member 11.
- a reaming tool 214 disposed between the second housing portion 14 and the output member 11.
- the motor 26 either drives the output member 11 or the reaming tool 214.
- the mode is selected manually by the user as shown in FIGS. 22A-22B and described below.
- the mode is selected by applying either the output member 11 or the reaming tool 214 to a workpiece in order to use screwdriver 10" as a screwdriver or a reamer, respectively, as shown in FIGS. 23A-23B and described below.
- Other means for selecting the mode of operation are also contemplated by this disclosure.
- the reaming tool would oscillate. For example, the user's wrist remains rotated clockwise, and the reaming tool rotates in a clockwise direction for a short time period, reverses direction for a short time period, repeating until operation is terminated.
- the reaming tool would have a pulse mode. If the drive signal is pulsed, a spike in the torque output might facilitate overcoming a burr.
- the power tool could have multiple gears associated with it. At lower speeds, higher torque could be achieved while at higher speeds, lower torque would be sufficient for driving screws, for example.
- FIGS. 22A-22B show an exemplary clutch mechanism for selectively engaging the reaming tool 214 (to operate screwdriver 10" as a reamer) or the output member 11 (to operate screwdriver 10" as a screwdriver). It is to be understood that the representation of the reaming tool 214 in FIGS. 22A-22B has been simplified from its depiction in FIG. 21 in order to more clearly convey the mode switching.
- the user rotates a collar 240 between two positions to select the mode of operation. It should be understood that this collar could also be implemented to translate between the two positions while remaining rotationally fixed.
- the collar 240 is attached to a grounding ring 228.
- the grounding ring 228 engages a planet carrier 236 and prevents it from rotating.
- the motor drives the planets 237 to rotate about the pins of the planet carrier 236, causing the ring gear 232 to rotate. This drives the reaming tool 214 while the output member 11 remains fixed, and as such, screwdriver 10" operates as in reamer mode.
- the planet carrier 236 When the grounding ring 228 is in the forward position as shown in FIG. 22B , the planet carrier 236 is free to rotate, and the ring gear 232 is fixed. In this configuration, the motor drives the planets 237 which in turn drives the output member 11, and as such, screwdriver 10" operates in screwdriver mode. It is envisioned that in an alternative embodiment, the ring gear 232 and the planet carrier 236 may be fixed to one another and free to rotate at the same time.
- FIGS. 23A and 23B illustrate another exemplary clutch mechanism for selecting the mode of operation.
- a dog type clutch 238 is used to selectively engage the reaming tool 214. It is to be understood that the representation of the reaming tool 214 in FIGS. 23A-23B has been simplified from its depiction in FIG. 21 in order to more clearly convey the mode switching.
- screwdriver 10" operates as a screwdriver as shown in FIG. 23A unless the user applies the reaming tool 214 to a workpiece 230. If no force is applied to the reaming tool, the dog clutch 238 is not engaged, and the output member 11 is free to rotate.
- the user applies the reaming tool 214 to a workpiece 230. This bias load applies a force to the compression springs 234, as shown in FIG. 23B . This engages the dog clutch 238, which causes the reaming tool 214 to rotate with the output member 11..
- This embodiment otherwise functions the same as the other embodiments discussed above.
- a reaming attachment 300 may be coupled to an output shaft 312 of a power tool 310.
- the power tool 310 may be similar to the above-described screwdriver 10 that is driven according to rotation of the tool housing as sensed by a rotational motion sensor.
- the power tool 310 may be an ordinary power drill, power driver, or power screwdriver that is driven according to actuation of an on-off power switch or a variable speed trigger switch.
- the reaming attachment 300 includes a driving shaft 302 integral with the output shaft 312 for rotation with the output shaft 312 about a longitudinal axis X.
- the driving shaft 302 is permanently attached to the output shaft 312 of the power tool 310.
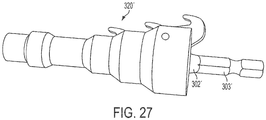
- a similar reaming attachment 300' may include a driving shaft 302' having a hex fitting 303' that can be removably coupled to an output shaft of a power tool, e.g., by a quick-release tool holder, a chuck, or a hex tool holder.
- a driving shaft can be removably coupled to an output shaft, e.g., by a threaded connection, a friction fit coupling, a snap-fit connector, and/or a bayonet connection.
- the driving shaft 302 non-rotationally carries a screwdriving portion 320 and a reaming portion 330. Unlike the embodiments of FIGS. 22A-23B , the screwdriving portion 320 and the reaming portion 330 always rotate together with the driving shaft 302 about the axis X, and thus together with the output shaft 312 of the power tool 310.
- the reaming portion 330 includes a front body portion 332 and a rear body portion 340 that are non-rotationally carried by the driving shaft 302.
- the front body portion 332 has a stepped configuration with a plurality of cylindrical steps 334 that increase in diameter from front to rear. Adjacent cylindrical steps 334 are connected by frustroconical surfaces 336.
- the rear body portion 340 comprises a generally cylindrical disc 342.
- the rear body portion 340 is axially fixed to the driving shaft 302 and abuts the housing front end of the power tool 310.
- the front body portion 332 is axially moveable relative to the driving shaft 302 and is biased away from the rear body portion 340 by a compression spring 344 disposed between the front body portion 332 and the rear body portion 340.
- the front and rear body portions 332, 340 have radial slots 346, 348, respectively, that extend in an axial direction. Removably received in the axial slots 346, 348 is a reaming blade 350.
- the blade 350 has a rear end 352 axially fixed to the rear body portion 340, and a working end 354 that remains stationary relative to the driving shaft 302 when the front body portion 340 moves axially.
- the working end 354 has a stepped configuration with a plurality of hook shaped cutting surfaces 356, each having a diameter corresponding to one of the cylindrical steps 334 on the front body portion 332.
- the output shaft 312 causes the driving shaft 302, screwdriving portion 320, and the front and rear bodies 332, 340 of the reaming portion 340 to rotate simultaneously about the longitudinal axis X.
- the reaming attachment 320 may be used to drive a fastener 360 into a workpiece W (as shown in FIG. 25 ).
- a screwdriving bit 362 is inserted into the bit holding portion 322.
- the front body 332 remains biased in its forward-most position, so that the cutting surfaces 356 of the blade 350 are not exposed.
- the driving shaft 302 causes the screwdriving bit 362 to rotate to drive the screw 360 into the workpiece.
- the reaming attachment 230 may also be used to ream the edge 370 of a pipe P to remove burrs or shavings.
- the front body is inserted into the pipe P until one of the stepped cylindrical surfaces 334 or conical surfaces 336 abut against the edge 370 of the pipe P.
- the front body 332 retracts rearward in a direction R against the force of spring 344. This retraction of the front body 332 causes the cutting surfaces 356 of the blade 350 to be exposed.
- One of the hook shaped cutting surfaces 356 hooks around the edge 370 of the blade.
- the cutting surface 356 rotates to remove material from the edge 370 of the pipe P.
- the front portion 332 is removed from the pipe P and moves axially forward opposite the direction R, to cause apparent retraction of the cutting surfaces 356.
- the screwdriving portion 320 includes a bit holding portion 322 formed at the front end of the driving shaft 302.
- the bit holding portion 322 is formed with an internal bore 324 configured to retain a bit 362, such a screwdriving bit, for driving a fastener (e.g., screw 360) into a workpiece W.
- the bit holding portion 322 may include a bit retention assembly for holding the bit 362 in the internal bore 324.
- a bit retention assembly 380 includes a shaft 412 having a sidewall 413 defining the internal bore 324 in the form of a polygonal (e.g., hexagonal) cavity.
- the stepped front body 332 of the reamer portion 340 functions as an actuator sleeve and is disposed around a first end 424 of the shaft 412.
- the stepped front body 332 engages a retainer 426 (e.g., a ball) that is received in a groove opening 428 of the sidewall 413 of the shaft 412.
- a retainer 426 e.g., a ball
- inside wall of the stepped front body 332 includes an internal ramp portion 432 and an internal cylindrical portion 433 that each can selectively abut the retainer ball 426.
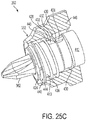
- a retainer spring 430 substantially surrounds the shaft 412 and biases the retainer ball 426 in a forward direction (best shown in FIG. 25C ).
- the retainer spring 430 can be a helical compression spring having a helix portion 430a and ending at a bend portion that transitions to an inwardly projecting portion that is received at least partially in the groove opening 428 to bias the retainer 426 in a forward direction toward the front end 424 of the shaft 412.
- a rearward portion of the retainer spring 430 is disposed against a forward facing shoulder 412a of the shaft 412.
- An actuator spring 436 biases the stepped front body 332 in a rearward direction relative to the first end 424 of the shaft 412.
- a retainer clip 440 is received in a recessed groove 442 in the first end 424 of the shaft 412 for supporting a washer 444 against a forward end of the actuator spring 436.
- a second end of the actuator spring 436 is received against an interior shoulder portion 445 of the stepped front body 332 in order to bias the stepped front body 332 in a rearward direction relative to the first end 424 of the shaft 412.
- the stepped front body 332 In its rest position, the stepped front body 332 is positioned over the bit holding portion 322 so that the inner cylindrical portion 433 abuts the ball 426 and biases the ball radially inwardly.
- the end of the bit 362 engages the ball 426, pushing the ball 426 rearward against the force of the the retainer spring 430.
- the ball 426 moves rearward in the groove opening 428, it also moves radially outward along the internal ramp 432, providing clearance for further insertion of the bit.
- the spring 430 causes the ball 426 to move forward and radially inward to engage a notch or groove 363 in the bit 362.
- the inner cylindrical surface 433 now pushes the ball 462 radially inward to retain the bit 362 in the bore 324.
- the stepped front body 332 is pulled in a forward direction against the force of the spring 436. This causes the ramp 432 to be axially aligned with the ball 462 so that the ball can move radially outward along the surface of the ramp. Thus, the ball no longer tightly engages the groove 363 in the bit, enabling the bit 362 to be removed from the bore 324.
- the bit retention device 380 may include a plunger for ejecting the bit from the bore when the ball is not engaging the bit.
- other types of bit retention mechanisms may be used, such as, for example, a hog ring, a retention clip, or a magnet. Examples of other retention mechanisms can be found, e.g., in U.S. Patent App. Pub. No. 2012/0326401 , which is incorporated by reference.
- the driving shaft 302 may be formed with a screwdriving or nut driving head portion, or another type of rotational driving implement.
- a rotary power tool in the form of a ratchet wrench 510 may include the above or below described embodiments of an improved user input control. Exemplary components and features of the ratchet wrench 510 are described below.
- ratchet wrench 510 While the following description is provided with reference to a ratchet wrench 510, it should be readily understood to one of ordinary skill in the art that the broader aspects of the present disclosure are applicable to other types of power tools that have an output axis at an angle to a rotatable axis of the motor, including but not limited to other power tools that have an elongated housing aligned perpendicularly to a rotational axis of an output member of the tool, e.g., a right angle drill or right angle screwdriver.
- the ratchet wrench 510 is a right angle socket wrench and includes an elongated housing 512 having a longitudinal axis 509.
- the housing 512 may be formed from two or more housing shells that cooperate to define an internal cavity.
- the housing 512 is configured to receive a motor 526, a transmission 515 coupled to an output of the motor 526, and an intermediate rotatable shaft 519 rotatably coupled to an output of the transmission 515.
- Coupled to the housing 512 is a ratcheting head 521 having a ratcheting mechanism 523 coupled to an output of the intermediate shaft 519, and an output member or drive shaft 511, where the rotational axis 508 of the output member 511 is arranged generally perpendicular to the longitudinal axis 509 of the housing 512.
- the drive shaft 511 is configured to rotate about its rotational axis 508 in a ratcheting manner in one direction (either clockwise or counterclockwise) when the intermediate shaft 519 is rotated by the motor in either a clockwise or a counterclockwise direction.
- the ratcheting head 521 further includes a mechanical switch 525 that enables the rotational direction of the output shaft 511 to be switched between ratcheting in the clockwise direction and ratcheting in the counterclockwise direction, regardless of the direction of rotation of the intermediate shaft. Further details regarding operation of the ratcheting head can be found in prior art ratcheting wrenches, including, e.g., U.S. Patent Nos.
- the ratcheting head may have other types of transmission mechanisms that do not ratchet, but that only change the direction of rotation by a right angle, right angle or bevel gears, as will be understood by one of ordinary skill in the art.
- the output member 511 may has a polygonal shape (e.g., a square) for being received in a corresponding polygonal opening in a socket wrench accessory.
- a chuck or another type of tool holder may be affixed to the end of the output member 511. Further details regarding an exemplary bit holder are set forth in U.S. Patent Application No. 12/394,426 which is incorporated herein by reference.
- the housing 512 may also receive or be coupled to a rechargeable and/or removable power source 528 such as a battery pack with one or more battery cells.
- the power source may be an AC power plug coupled to the housing.
- An on-off switch 553 may be coupled to the housing 512 and may control power-up of the tool as discussed below.
- a control circuit 530 may be disposed on one or more circuit boards inside of the housing and in electrical communication with the switch 553 and the power source 528. As shown schematically in FIG. 29 , the control circuit 530 includes a rotational rate sensor 522 and a microcontroller 524 as well as other circuitry for interfacing with the power source 528, the on-off switch 553, and the motor 526 and for operating the tool.
- the control circuit 530 may operate according to one of the control methods discussed above with respect to the other embodiments of power tools, or according to one of the alternative control methods discussed below.
- the rotational rate sensor 522 may be spatially separated in a radial direction from the rotational axis of the output member 511 and may be oriented so that it senses rotational movement about the axis 508 of the output member 511.
- a motor drive circuit 525 enables voltage from the power source 528 to be applied across the motor 526 in either direction.
- the motor drive circuit 525 comprises an H-bridge circuit arrangement although other arrangements are contemplated.
- the control circuit 530 of the wrench 510 may also include a temperature sensor 531, a current sensor 532, a tachometer 533 and/or a LED 535.
- the controller 524 may be coupled to a direction switch module 540 that can be actuated by the user to indicate a desired direction of rotation of the output shaft.
- the rotational motion sensor 522 is gyroscope, such as a MEMS gyroscope.
- the operating principle of the gyroscope is based on the Coriolis effect.
- the rotational rate sensor may be comprised of one or more resonating masses. When the power tool is subject to rotational motion about the axis of the output member, the resonating mass will be laterally displaced in accordance with the Coriolis effect, such that the lateral displacement is directly proportional to the angular rate.
- resonating motion of the mass and the lateral movement of the mass(es) occur in one or more planes which may be orientated perpendicular to the rotational axis 508 of the output shaft 511.
- Sensing elements in the gyroscope detect the lateral displacement of the mass(es) and generate an applicable signal indicative of the lateral displacement.
- An exemplary rotational rate sensor is the ADXRS150 or ADXRS300 gyroscope device commercially available from Analog Devices, or the ISZ-650 or IXZ-2500 gyroscope devices commercially available from InvenSense, Inc.
- rotational rate sensor 522 described above is presently preferred for determining angular displacement of the tool, it is readily understood that this disclosure is not limited to this type of sensor. On the contrary, angular displacement may be derived in other manners and/or from other types of sensors. It is also noted that the signal from any rotational rate sensor can be filtered in the analog domain with discrete electrical components and/or digitally with software filters. It is readily understood that accelerometers, compasses, inertial sensors and other types of rotational motion sensors are contemplated by this disclosure. It is also envisioned that the rotational sensor as well as other tool components may be incorporated into a battery pack or any other removable pieces that interface with the tool housing.
- the rotational motion sensor 522 senses and monitors rotational motion of the housing 512 with respect to the rotational axis 508 of the output member 511.
- a control module implemented by the controller 524 receives input from the rotational motion sensor 522 and drives the motor 526 and thus the output member 511 based upon input from the rotational motion sensor 522.
- the term module may refer to, be part of, or include an Application Specific Integrated Circuit (ASIC); an electronic circuit; a combinational logic circuit; a field programmable gate array (FPGA); a processor (shared, dedicated, or group) that executes code; other suitable components that provide the described functionality; or a combination of some or all of the above, such as in a system-on-chip.
- the term module may include memory (shared, dedicated, or group) that stores code executed by the processor, where code, as used above, may include software, firmware, and/or microcode, and may refer to programs, routines, functions, classes, and/or objects.
- control circuit 530 and its control method operate such that user rotation of the housing about the rotational axis 508 of the output shaft 511 is used to control motor operation.
- rotational motion of the tool about the rotational axis 508 of the output member 511 is monitored using the rotational motion sensor 522.
- the angular velocity, angular displacement, and/or direction of rotation can be sensed and used as a basis for driving the motor 526 and thus the output shaft 511.
- the control input and the resulting output occur as rotation about the same axis. This results in a highly intuitive control similar to the use of a manual wrench.
- the control scheme is implemented as computer executable instructions residing in a memory and executed by a processor of the controller 524.
- the switch 553 may be include a pushbutton switch accessible on the exterior of the tool housing.
- the switch 513 When the operator depresses the pushbutton switch 513 a first time, the tool is powered up (i.e., battery is connected to the controller and other electronic components). Rotational motion is detected and acted upon only when the tool is powered up.
- the on/off switch 513 may be a single pole, single throw switch accessible on the exterior of the tool. When the operator places the switch in an ON position, the tool is powered up. When the operator places the switch in an OFF position, the tool is powered down and no longer operational.
- FIG. 30A One exemplary power control scheme 540 for the tool 510 is illustrated in FIG. 30A .
- a starting or reference point ( ⁇ ) is initialized to zero. Any subsequent angular displacement of the tool is then measured in relation to this reference.
- angular displacement ( ⁇ ) of the tool is monitored. The angular displacement may be derived from the rate of angular displacement over time or angular velocity as provided by the rotational rate sensor 522.
- the reference value ( ⁇ ) is set to be the previous reference value plus the change in angular displacement ( ⁇ ).
- the controller determines whether the new reference value indicates that the tool has been rotated in the clockwise direction. If so, then at step 545, the controller drives the motor to rotate.
- the controller determines whether the new reference value indicates that the tool has been rotated in the counterclockwise direction. If so, then at step 545, the controller drives the motor to rotate. Whenever the motor rotates, regardless of the direction of rotation of the housing, the output shaft 511 will rotate in the direction set by the switch 525.
- Threshold values may include hysteresis; that is, the lower threshold is set at six degrees for turning on the motor but set at four degrees for turning off the motor, for example. It is also to be understood that only the relevant steps of the methodology are discussed above in relation to FIG. 30A , but that other functionality may be needed to control and manage the overall operation of the wrench.
- FIG. 30B Another exemplary power control scheme 640 for the tool 510 is illustrated in FIG. 30B .
- the power tool is configured so that the motor only rotates when the housing 512 is rotated in the same direction as the switch 525 has been set for rotating the output shaft 511. For example, if the switch 525 has been set to ratchet in the clockwise direction, the motor will only rotate if the housing 512 is also rotated in the clockwise direction by about the output shaft axis 508. If the housing 512 is rotated in the counterclockwise direction, then the motor will not rotate. Similarly, if the switch has been set to ratchet in the counterclockwise direction, the motor will only rotate if the housing is also rotated in the counterclockwise direction about the output shaft axis 508. If the housing 512 is rotated in the clockwise direction, then the motor will not rotate.
- FIGS. 31A-31C illustrate an exemplary direction switch module 550 that is coupled to the direction control switch 525 for this purpose.
- the direction control switch 525 is a knob that can be moved among three positions: left, center and right.
- the knob is coupled directly to a slide bar 552 having a toothed portion 554.
- the tooth of the slid bar engages a wheel 556 of a switching mechanism, rotating the wheel and thereby determining the rotational direction of the ratcheting mechanism.
- the toothed portion 554 of the slide bar 552 When positioned in either the left or right positions, the toothed portion 554 of the slide bar 552 also closes a set of electrical contacts, thereby communicating the position of the slide bar 552 to the controller 524. This will enable the controller to drive the motor only when the tool housing is rotated in the direction set by the position of the actuator as will be further described below.
- the toothed portion 554 electrically connects left electrical contact 556 and center electrical contact 558 to indicate to the controller that the user desires to operate the tool in only the counterclockwise direction.
- the slide bar 552 When the slide bar 552 is in the right position, as shown in FIG.
- the toothed portion 554 electrically connects a right electrical contact 560 and the center electrical contact 558 to indicate to the controller that the user desires to operate the tool only in the clockwise direction.
- the toothed portion 554 does not electrically connect the center electrical contact 558 to either the left electrical contact 556 or the right electrical contact 560, which indicates to the controller that the user does not desire to operate the tool.
- Other types of switches and sensors for switches could be substituted, as will be apparent to one of ordinary skill in the art.
- a starting or reference point ( ⁇ ) is initialized to zero. Any subsequent angular displacement of the tool is then measured in relation to this reference.
- angular displacement ( ⁇ ) of the tool is monitored. The angular displacement may be derived from the rate of angular displacement over time or angular velocity as provided by the rotational rate sensor 522.
- the reference value ( ⁇ ) is set to be the previous reference value plus the change in angular displacement ( ⁇ ).
- the controller determines whether the new reference value indicates that the housing has been rotated in the clockwise direction about the axis 608.
- the controller determines whether the switch 525 is also set to rotate the output shaft in the clockwise direction. If so, then at step 545, the controller drives the motor to rotate (the motor can be rotated in either direction). If not, then, at step 648, the controller terminates operation of the motor.
- step 644 the controller determines that the new reference value does not indicate that the housing has been rotated in the clockwise direction about the axis 508, then at step 646, the controller determines whether the new reference value indicates that the tool has been rotated in the counterclockwise direction. If so, then at step 649, the controller determines whether the switch 525 is also set to rotate the output shaft in the counterclockwise direction. If so, then at step 645, the controller drives the motor to rotate (in either direction). Whenever the motor rotates, regardless of the direction of rotation of the housing, the output shaft 511 will rotate in the direction set by the switch 525.
- Threshold values may include hysteresis; that is, the lower threshold is set at six degrees for turning on the motor but set at four degrees for turning off the motor, for example. It is also to be understood that only the relevant steps of the methodology are discussed above in relation to FIG. 30B , but that other functionality may be needed to control and manage the overall operation of the wrench.
- the motor may be driven at a variable speed having some relationship to the amount or rate of rotation of the housing 512 about the axis 508, as described above with respect to the other embodiments.
- the control schemes of FIGS. 30A and 30B may incorporate the haptic feedback algorithms discussed above to indicate to the user when the tool is active and ready for use.
- the control schemes of FIGS. 30A and 30B may be used with in-line ratcheting screwdrivers or other in-line tools where the output axis is coincident or parallel to the axis of the motor and/or the housing or handle.
- FIGS. 32A and 32B illustrate an alternative embodiment of a power socket wrench 510'.
- the wrench 510' is similar to the wrench 510 described above except that the wrench 510' is equipped with two drive squares 515', 516', one extending from each side of a ratchet head 517'.
- the drive squares are configured to receive a socket as is readily known in the art.
- the motor and the output shaft only need to be driven in one direction regardless of the direction of rotation of the housing because one of the drive squares 515' can be used for clockwise ratcheting rotation, while the other of the drive squares 516' can be used for counterclockwise ratcheting rotation.
- the user selects the appropriate side of the ratchet head to apply to the workpiece.
- the wrench 510' may be programmed to operate according to the control scheme of FIG. 30A , described above. That is, the tool operator actuates an on/off switch 513' in order to power up the tool and begin work.
- the user rotates the tool housing about the rotational axis of the drive squares. Angular displacement of the tool housing is monitored in relation to a zero position. The motor is driven once the angular displacement exceeds a minimum displacement threshold and continues until the tool housing is rotated back to the zero position. It is understood that the motor is driven in a fixed direction which is independent of the direction the tool housing is rotated.
- the impact driver 760 is comprised generally of a housing 762 having a shape like a conventional power drill.
- the housing 762 defines a handle portion 763 which is gripped by a user during tool operation.
- An output member 764 that includes a tool bit holder extends from one end of the housing and is configured to rotate about its rotational axis 765.
- the rotational axis of the output member 764 may be angled relative to a longitudinal axis of the handle portion 763 (e.g., substantially perpendicular).
- a motor 766 residing in the housing 762 is drivably connected to the output member 764 to impart rotary motion thereto.
- An impact mechanism 767 is interposed between the motor 766 and the output member 764. Further details regarding an exemplary impact mechanism are set forth in U.S. Patent No. 5,016,501 and U.S. Patent Application Pub. Nos. 2007/0267207 and 2010/0071923 , which are incorporated herein by reference.
- Other exemplary impact mechanisms can be found in IDS600 Impact Screwdriver and FDS600 Impact Screwdriver commercially available from Black & Decker and in the DCF895 Impact Driver, DCF896 Impact Driver, and the DCF880 Impact Wrench available commercially from DeWALT Industrial Tool Co.
- the impact driver 760 includes a printed circuit board 770 to which is mounted a microcontroller, rotational motion sensor (e.g., a gyroscope) and other control electronics, similar to the components of the control circuit of FIG. 7 , described above.
- the printed circuit board 770 has a front end portion 776 and a rear end portion 772.
- the front end portion 776 is sandwiched between a pair of elastomeric dampers 782 (or springs), one of which is coupled to an exterior wall 778 of the housing 762, and the other of which is coupled to a fixed interior wall 780 of the housing 762.
- the dampers 782 are oriented to dampen vibrations in a direction Y that is substantially perpendicular to the longitudinal axis L of the motor and output shaft.
- the rear end portion 772 of the printed circuit board 770 is fixedly connected to a floating shoe 774 that is not fixedly connected to the housing.
- a depending portion 784 of the shoe 774 is coupled to a plurality of elastomeric dampers 786 (or springs) that abut the interior wall 780 of the housing and another portion of the housing.
- the dampers 786 are oriented to dampen vibrations in a direction X that is substantially parallel to the longitudinal axis L.
- the dampers 782 and 786 combine to dampen vibrations from the motor and the impact mechanism (which can generate large vibrations) so that the vibrations do not interfere with the readings of the rotary motion sensor.
- the tool operator actuates an on/off switch 761 in order to power up the tool and begin work.
- the user rotates the tool housing 763 about the rotational axis of the output member 764 to drive the motor.
- Angular displacement of the tool housing is monitored in relation to a zero position.
- the motor is driven once the angular displacement exceeds a minimum displacement threshold and continues until the tool housing is rotated back to the zero position.
- the motor is driven is a clockwise direction.
- the motor is driven in a counter-clockwise direction.
- the rotational direction of the motor is determined by the rotational motion of the tool housing.
- the impact driver may otherwise operate in a manner similar to one or more of the control schemes described above (e.g., with respect to FIGS. 8A-8C , 9A-9E, 18, 30A, and 30B .
- Example embodiments are provided so that this disclosure will be thorough and will fully convey the scope to those who are skilled in the art. Numerous specific details are set forth such as examples of specific components, devices, and methods, to provide a thorough understanding of embodiments of the present disclosure. It will be apparent to those skilled in the art that specific details need not be employed, that example embodiments may be embodied in many different forms and that neither should be construed to limit the scope of the disclosure. In some example embodiments, well-known processes, well-known device structures, and well-known technologies are not described in detail.
Description
- The present invention relates generally to power tools, such as a power screwdriver, and, more particularly, to a control scheme that controls rotation of an output member of a tool based on rotary user input.
- In present-day power tools, users may control tool output through the use of an input switch. This can be in the form of a digital switch in which the user turns the tool on with full output by pressing a button and turns the tool off by releasing the button. More commonly, it is in the form of an analog trigger switch in which the power delivered to the tool's motor is a function of trigger travel. In both of these configurations, the user grips the tool and uses one or more fingers to actuate the switch. The user's finger must travel linearly along one axis to control a rotational motion about a different axis. This makes it difficult for the user to directly compare trigger travel to output rotation and to make quick speed adjustments for finer control.
- Another issue with this control method is the difficulty in assessing joint tightness. As a joint becomes tighter, the fastener becomes more reluctant to move farther into the material. Because the tool motor attempts to continue spinning while the output member slows down, a reactionary torque can be felt in the user's wrist as the user increases bias force in an attempt to keep the power tool stationary. In this current arrangement, the user must first sense tightness with the wrist before making the appropriate control adjustment with the finger.
-
US 2012/160529 discloses a power tool according to the preamble ofClaim 1. - The present invention provides a power tool in accordance with
Claim 1. Preferred features of the invention are defined and described in the dependant claims. -
FIG. 1 is a perspective view of an exemplary power screwdriver. -
FIG. 2 is a longitudinal section view of the power screwdriver ofFIG. 1 . -
FIG. 3 is a perspective view of the power screwdriver ofFIG. 1 with the handle being disposed in a pistol-grip position. -
FIG. 4 is an exploded perspective view of the power screwdriver ofFIG. 1 . -
FIGS. 5A-5C are fragmentary section views depicting different ways of actuating the trigger assembly of the power screwdriver ofFIG. 1 . -
FIGS. 6A-6C are perspective views of exemplary embodiments of the trigger assembly. -
FIG. 7 is a schematic for an exemplary implementation of the power screwdriver. -
FIGS. 8A-8C are flow charts for exemplary control schemes for the power screwdriver. -
FIG. 8D is a flow chart for another embodiment of a control scheme for the power screwdriver. -
FIGS. 9A-9E are charts illustrating different control curves that may be employed by the power screwdriver. -
FIG. 10 is a diagram depicting an exemplary pulsing scheme for providing haptic feedback to the tool operator. -
FIG. 11 is a flow chart depicting an automated method for calibrating a gyroscope residing in the power screwdriver. -
FIG. 12 is a partial sectional view of the power screwdriver ofFIG. 1 illustrating the interface between the first and second housing portions. -
FIG. 13A-13C are perspective views illustrating an exemplary lock bar assembly used in the power screwdriver. -
FIG. 14A-14C are partial sectional views illustrating the operation of the lock bar assembly during configuration of the screwdriver from the "pistol" arrangement to the "inline" arrangement. -
FIG. 15 is a flowchart of an exemplary method for preventing an oscillatory state in the power screwdriver. -
FIG. 16 is a fragmentary section view depicting an alternative trigger switch assembly. -
FIGS. 17A-17C are cross-sectional views illustrating alternative on/off and sensing mechanisms. -
FIG. 18 is a flowchart for another exemplary control scheme for the tool. -
FIGS. 19A-19B are diagrams illustrating an exemplary self-locking planetary gear set. -
FIG. 20 is a perspective view of a second exemplary power screwdriver. -
FIG. 21 is a perspective view of a third exemplary power screwdriver. -
FIGS. 22A-B are cross-sectional views of the exemplary power screwdriver ofFIG. 21 , illustrating one way to activate the reaming tool. and -
FIGS. 23A-B are cross-sectional views of the exemplary power screwdriver ofFIG. 21 , illustrating a second way to activate the reaming tool. -
FIG. 24 is a perspective view of another exemplary power screwdriver and reaming tool. -
FIGS. 25A is a side view of the power screwdriver and reaming tool ofFIG. 24 . -
FIG. 25B is an exploded view of a portion of the power screwdriver and reaming tool ofFIG. 24 . -
FIG. 25C is a partial cross-sectional view of a portion of the power screwdriver and reaming tool ofFIG. 24 . -
FIGS. 26A and26B are side views of the power screwdriver and reaming tool ofFIG. 24 in operation. -
FIG. 27 is a perspective view of another embodiment of a screwdriver and reaming accessory for a power tool. -
FIG. 28A is a perspective view of another embodiment of an exemplary power tool with improved user input control configured as a power wrench. -
FIG. 28B is a top view of the power tool ofFIG. 28A . -
FIG. 29 is a schematic diagram of a control circuit for the power tool ofFIGS. 28A and 28B . -
FIG. 30A depicts a first exemplary control scheme for the power tool ofFIGS. 28A-29 . -
FIG. 30B depicts a second exemplary control scheme for the power tool ofFIGS. 28A-29 . -
FIGS. 31A-31C depict an exemplary actuator for selecting the direction of operation for the power tool ofFIGS. 28A-29 . -
FIG. 32A is a perspective view of another embodiment of an exemplary power tool with improved user input control configured as an alternative embodiment of a power wrench -
FIG. 32B is a top view of the alternative embodiment of the power socket wrench ofFIG. 31A . -
FIG. 33 is a perspective view of another embodiment of an exemplary power tool with improved user input control configured as an impact driver. -
FIGS. 34-36 are side views partially in section of the impact driver ofFIG. 33 . - The drawings described herein are for illustrative purposes only of selected embodiments of the invention and not all possible implementations. Corresponding reference numerals indicate corresponding parts throughout the several views of the drawings.
- With reference to
FIGS. 1 and 2 , an exemplary power screwdriver is indicated generally byreference number 10. Thescrewdriver 10 is comprised generally of anoutput member 11 configured to rotate about alongitudinal axis 8 and amotor 26 driveably connected to theoutput member 11 to impart rotary motions thereto. Tool operation is controlled by a trigger switch, a rotational rate sensor and a controller in a manner further described below. A chuck or some other type of tool holder may be affixed to the end of theoutput member 11. Further details regarding an exemplary bit holder are set forth inU.S. patent application Ser. No. 12/394,426 which is incorporated herein by reference. Other components needed to construct thescrewdriver 10 are further described below. While the following description is provided with reference toscrewdriver 10, it is readily understood that the broader aspects of the present disclosure are applicable to other types of power tools, including but not limited to tools having elongated housings aligned concentrically with the output member of the tool. - The housing assembly for the
screwdriver 10 is preferably further comprised of afirst housing portion 12 and asecond housing portion 14. Thefirst housing portion 12 defines a handle for the tool and can be mounted to thesecond housing portion 14. Thefirst housing portion 12 is rotatable in relation to thesecond housing portion 14. In a first arrangement, the first andsecond housing portions FIG. 1 This arrangement is referred to herein as an "inline" configuration. - The
screwdriver 10 may be further configured into a "pistol-type" arrangement as shown inFIG. 3 . This second arrangement is achieved by depressing arotation release mechanism 130 located in the side of thesecond housing portion 14. Upon depressing therelease mechanism 130, thefirst housing portion 12 will rotate 180 degrees in relation to thesecond housing portion 14, thereby resulting in the "pistol-type" arrangement. In the second arrangement, the first andsecond housing portions elongated groove 6 that extends from one side of the tool continuously around the back to the other side of the tool. By placing an index finger in thegroove 6 on opposing sides, the tool operator can better grip the tool, and the positioning of the palm directly behind thelongitudinal axis 8 allows the operator to better control the screwdriver. - With reference to
FIGS. 2 and4 , thefirst housing portion 12 can be formed from a pair ofhousing shells internal cavity 43. Theinternal cavity 43 is configured to receive arechargeable battery pack 44 comprised of one or more battery cells. Acircuit board 45 for interfacing the battery terminals with other components is fixedly mounted in theinternal cavity 43 of thefirst housing portion 12. Thetrigger switch assembly 50 is also pivotably coupled to thefirst housing portion 12. - Likewise, the
second housing portion 14 can be formed of a pair ofhousing shells internal cavity 48. Thesecond housing portion 14 is configured to receive thepowertrain assembly 49 which includes themotor 26, the transmission, and theoutput member 11. Thepower train assembly 49 can be mounted in theinternal cavity 48 such that a rotational axis of the output member is disposed concentrically about the longitudinal axis of thesecond housing portion 14. One ormore circuit boards 45 are also fixedly mounted in theinternal cavity 48 of the second housing portion 14 (as shown inFIG. 14A ). Components mounted to the circuit board may include therotational rate sensor 22, themicrocontroller 24 as well as other circuitry for operating the tool. Thesecond housing portion 14 is further configured to support therotation release mechanism 130. - With reference to
FIGS. 3 ,4 ,12, 13 , and14 , therotary release mechanism 130 can be mounted in either the first orsecond housing portions release mechanism 130 comprises alock bar assembly 140 that engages with a set of locking features 132 associated with the other one of the first and second housing portions. In the exemplary embodiment, thelock bar assembly 140 is slidably mounted inside thesecond housing portion 14. Thelock bar assembly 140 is positioned preferably so that it may be actuated by the thumb of a hand gripping thefirst housing portion 12 of the tool. Other placements of the lock bar assembly and/or other types of lock bar assemblies are also contemplated. Further details regarding another lock bar assembly is found inU.S. patent application Ser. No. 12/783,850 - The
lock bar assembly 140 is comprised of alock bar 142 and abiasing system 150. Thelock bar 142 is further defined as abar body 144, twopush members 148 and a pair ofstop members 146. Thepush members 148 are integrally formed on each end of thebar body 144. Thebar body 144 can be an elongated structure having apocket 149 into which thebiasing system 150 is received. Thepocket 149 can be tailored to the particular configuration of the biasing system. In the exemplary embodiment, thebiasing system 150 is comprised of twopins 152 and aspring 154. Eachpin 152 is inserted into opposing ends of thespring 154 and includes an integral collar that serves to retain the pin in the pocket. When placed into the pocket, the other end of each pin protrudes through an aperture formed in an end of the bar body with the collar positioned between the inner wall of the pocket and the spring. - The
stop members 146 are disposed on opposite sides of thebar body 144 and integrally formed with thebar body 144. Thestop members 146 can be further defined as annular segments that extend outwardly from a bottom surface of thebar body 144. In a locking position, thestop members 146 are arranged to engage the set of locking features 132 that are integrally formed on the shell assembly of thefirst housing portion 12 as best seen inFIG. 14A . Thebiasing system 150 operates to bias thelock bar assembly 140 into the locking position. In this locking position, the engagement of thestop members 146 with the locking features 132 prevents the first housing portion from being rotated in relation to the second housing portion. - To actuate the
lock bar assembly 140, thepush members 148 protrude through a push member aperture formed on each side of thesecond housing portion 14. When thelock bar assembly 140 is translated in either direction by the tool operator, thestop members 146 slide out of engagement with the locking features 132 as shown inFIG. 14B , thereby enabling the first housing portion to rotate freely in relation to the second housing portion. Of note, thepush members 148 are offset from the center axis on which thefirst housing portion 12 and thesecond housing portion 14 rotate with respect to one another. This arrangement creates an inertial moment that helps to rotate thesecond housing portion 14 in relation to thefirst housing portion 12. With a single actuating force, the tool operator can release thelock bar assembly 140 and continue rotating the second housing portion. The user can then continue to rotate the second housing portion. The user can then continue to rotate the second housing portion (e.g., 180 degrees) until the stop members re-engage the locking features. Once thestop members 146 are aligned with the locking features, thebiasing system 150 biases thelock bar assembly 140 into a locking position as shown inFIG. 14C . - An improved user-input method for the
screwdriver 10 is proposed. Briefly, tool rotation is used to control rotation of the output member. In an exemplary embodiment rotational motion of the tool about the longitudinal axis of the output member is monitored using the rotational motion sensor disposed in the power tool. The angular velocity, angular displacement, and/or direction of rotation can be measured and used as a basis for driving the output member. The resulting configuration improves upon the shortcomings of conventional input schemes. With the proposed configuration, the control input and the resulting output occur as a rotation about the axis. This results in a highly intuitive control similar to the use of a manual screwdriver. While the following description describes rotation about the longitudinal axis of the output member, it is readily understood that the control input could be rotational about a different axis associated with the tool. For example, the control input could be about an axis offset but in parallel with the axis of the output member or even an axis askew from the axis of the output member. Further details regarding the control scheme may be found inU.S. Patent Application No. 61/292,966 - This type of control scheme requires the tool to know when the operator would like to perform work. One possible solution is a switch that the tool operator actuates to begin work. For example, the switch may be a single pole, single throw switch accessible on the exterior of the tool. When the operator places the switch in an ON position, the tool is powered up (i.e., battery is connected to the controller and other electronic components). Rotational motion is detected and acted upon only when the tool is powered up. When the operator places the switch in an OFF position, the tool is powered down and no longer operational.
- In the exemplary embodiment, the tool operator actuates a
trigger switch assembly 50 to initiate tool operation. With reference toFIGS. 5A-5C , thetrigger switch assembly 50 is comprised primarily of anelongated casing 52 that houses at least onemomentary switch 53 and a biasingmember 54, such as a spring. Theelongated casing 52 is movably coupled to thefirst housing portion 12 in such a way that allows it to translate and/or pivot about any point of contact by the operator. For example, if the tool operator presses near the top or bottom of theelongated casing 52, thetrigger switch assembly 50 pivots as shown inFIGS. 5A and 5B , respectively. If the tool operator presses near the middle of theelongated casing 52, thetrigger switch assembly 50 is translated inward towards the tool body as shown inFIG. 5C . In any case, the force applied to theelongated casing 52 by the operator will depress at least one of the switches from an OFF position to an ON position. If there are two ormore switches 53, theswitches 53 are arranged electrically in parallel with each other (as shown inFIG. 7 ) such that only one of the switches needs to be actuated to power up the tool. When the operator releases the trigger, the biasingmember 54 biases theelongated casing 52 away from the tool, thereby returning each of the switches to an OFF position. The elongated shape of the casing helps the operator to actuate the switch from different grip positions. It is envisioned that thetrigger switch assembly 50 may be comprised of more than twoswitches 53 and/or more than one biasingmember 54 as shown inFIGS. 6A-6C . -
FIG. 16 illustrates an alternativetrigger switch assembly 50, where like numerals refer to like parts.Elongated casing 52 is preferably captured by thefirst housing portion 12 so that it can only slide in one particular directionA. Elongated casing 52 may haveramps 52R.Ramps 52R engagecams 55R on a slidinglink 55. Slidinglink 55 is captured by thefirst housing portion 12 so that it can preferably only slide in along a direction B substantially perpendicular to direction A. - Sliding
link 55 is preferably rotatably attached torotating link 56. Rotatinglink 56 may be rotatably attached to thefirst housing portion 12 via apost 56P. - Accordingly, when the user moves
elongated casing 52 along direction A, ramps52R move cams 55R (and thus sliding link 55) along direction B. This causesrotating link 56 to rotate and make contact withmomentary switch 53, powering up thescrewdriver 10. - Preferably, elongated casing 52 contacts springs 54 which bias elongated
casing 52 in a direction opposite to direction A. Similarly, slidinglink 55 may contactsprings 55S which bias slidinglink 55 in a direction opposite to direction B. Also, rotatinglink 56 may contact aspring 56S thatbiases rotating link 56 away frommomentary switch 53. - Persons skilled in the art will recognize that, because
switch 53 can be disposed away fromelongated casing 52,motor 26 can be provided adjacent toelongated casing 52 and slidinglink 55, allowing for a more compact arrangement. - Persons skilled in the art will also recognize that, instead of having the user activating a
discrete trigger assembly 50 in order to power upscrewdriver 10,screwdriver 10 can have an inherent switch assembly.FIGS. 17A-17B illustrate one such an alternative switch assembly, where like numerals refer to like parts. - Referring now to
FIGS. 17A-17B for this embodiment, apower train assembly 49 as shown inFIG. 4 , which includesmotor 26, theoutput member 11 and/or any transmission there between, is preferably encased in ahousing 71 and made to translate axially inside thefirst housing portion 12. Aspring 72 of adequate stiffness biases thedrivetrain assembly 71 forward in the tool housing. Amomentary pushbutton switch 73 is placed in axial alignment with thedrivetrain assembly 71. When the tool is applied to a fastener, a bias load is applied along the axis of the tool and thedrivetrain assembly 71 translates rearward compressing the spring and contacting the pushbutton. In an alternative example, the drivetrain assembly remains stationary but acollar 74 surrounding the bit is made to translate axially and actuate a switch. Other arrangements for actuating the switch are also contemplated. - When the
pushbutton 73 is actuated (i.e., placed in a closed state), thebattery 28 is connected via power-regulating circuits to the rotational motion sensor, thecontroller 24, and other support electronics. With reference toFIG. 7 , thecontroller 24 immediately turns on a bypass switch 34 (e.g., FET). This enables the tool electronics to continue receiving power even after the pushbutton is released. When the tool is disengaged from the fastener, thespring 72 again biases thedrivetrain assembly 71 forward and thepushbutton 73 is released. In an exemplary embodiment, thecontroller 24 will remain powered for a predetermined amount of time (e.g., 10 seconds) after thepushbutton 73 is released. During this time, the tool may be applied to the same or different fastener without the tool being powered down. Once thepushbutton 73 has released for the predetermined amount of time, thecontroller 24 will turn off thebypass switch 34 and power down the tool. It is preferable that there is some delay between a desired tool shut down and powering down the electronics. This gives the driver circuit time to brake the motor to avoid motor coasting. In the context of the embodiment described inFIG. 7 , actuation ofpushbutton 73 also serves to reset (i.e., set to zero) the angular position. Powering the electronics may be controlled by the pushbutton or with a separate switch. Batteries which are replaceable and/or rechargeable serve as the power source in this embodiment, although the concepts disclosed herein as also applicable to corded tools. - The operational state of the tool may be conveyed to the tool operator by a light emitting diode 35 (LED) that will be illuminated while the tool is powered-up. The
LED 35 may be used to indicate other tool conditions. For example, a blinkingLED 35 may indicate when a current level has been exceeded or when the battery is low. In an alternative arrangement,LED 35 may be used to illuminate a work surface. - In another alternative arrangement (as shown in
figure 21 ), multiple LEDs may be used to indicate the direction and speed of tool operation. For example, three side-by-side LEDs 35 can be lit consecutively one at a time from left to right when theoutput member 11 is rotating in a clockwise direction and from right to left whenoutput member 11 is rotating in a counterclockwise direction. The duration of illumination, or blink rate, may indicate the speed of operation, where the longer each LED is lit, the slower the operation speed. When the direction of rotation ofoutput member 11 is reversed, theLEDs 35 should to reflect this transition. For example, theLEDs 35 could all be lit simultaneously for a brief period when the tool's rotation passes back through the starting or reference point to indicate the change. If the user does nothing else, theLEDs 35 might turn off or return to showing battery life or some other status. If the user continues to rotate the tool in the opposite direction, theLEDs 35 would resume consecutive illumination and blink rate based on direction and speed of rotation. Other alternative embodiments could include more or fewer LEDs used as described above. - In another alternative arrangement, the direction of rotation of
output member 11 might be indicated by one LED arrow. The arrow may change color based on speed, for example, from green to yellow to orange to red. The speed could also be indicated by the arrow's blink rate. - In this embodiment, the tool may be powered up but not engaged with a fastener. Accordingly, the controller may be further configured to drive the output member only when the
pushbutton switch 73 is actuated. In other words, the output member is driven only when the tool is engaged with a fastener and a sufficient bias force is applied to the drivetrain assembly. Control algorithm may allow for a lesser bias force when a fastener is being removed. For instance, the output member may be driven in a reverse direction when a sufficient bias load is applied to the drivetrain assembly as described above. Once the output member begins rotating, it will not shut off (regardless of the bias force) until some forward rotation is detected. This will allow the operator to loosen a screw and lower the bias load applied as the screw reverses out of the material without having the tool shut off because of a low bias force. Other control schemes that distinguish between a forward operation and a reverse operation are also contemplated by this disclosure. - Non-contacting sensing methods may also be used to control operation of the tool. For example, a
non-contact sensor 170 may be disposed on theforward facing surface 174 of the tool adjacent to thebit 178 as shown inFIG. 17C . Thenon-contact sensor 170 may be used to sense when the tool is approaching, being applied to, or withdrawing from a workpiece. Optic or acoustic sensors are two exemplary types of non-contact sensors. Likewise, an inertial sensor, such as an accelerometer, can be configured to sense the relative position or acceleration of the tool. For example, an inertial sensor can detect linear motion of the tool towards or away from a workpiece along the longitudinal axis of the tool. This type of motion is indicative of engaging a workpiece with the tool or removing the tool after the task is finished. These methods may be more effective for sensing joint completion and/or determining when to turn the tool off. - Combinations of sensing methods are also contemplated by this disclosure. For example, one sensing method may be used for startup while another is used for shutdown. Methods that respond to force applied to the workpiece may be preferred for determining when to start up the tool, while methods that sense the state of the fastener or movement of the tool away from the application may be preferred for determining when to modify tool output (e.g., shut down the tool).
- Components residing in the housing of the
screwdriver 10 include arotational rate sensor 22, which may be spatially separated in a radial direction from the output member as well as acontroller 24 electrically connected to therotational rate sensor 22 and amotor 26 as further illustrated schematically inFIG. 7 . Amotor drive circuit 25 enables voltage from the battery to be applied across the motor in either direction. Themotor 26 in turn drivably connects through a transmission (not shown) to theoutput member 11. In the exemplary embodiment, themotor drive circuit 25 is an H-bridge circuit arrangement although other arrangements are contemplated. Thescrewdriver 10 may also include atemperature sensor 31, acurrent sensor 32, atachometer 33 and/or aLED 35. Although a few primary components of thescrewdriver 10 are discussed herein, it is readily understood that other components may be needed to construct the screwdriver. - In an exemplary embodiment,
rotational motion sensor 22 is further defined as a gyroscope. The operating principle of the gyroscope is based on the Coriolis effect. Briefly, the rotational rate sensor is comprised of a resonating mass. When the power tool is subject to rotational motion about the axis of the spindle, the resonating mass will be laterally displaced in accordance with the Coriolis effect, such that the lateral displacement is directly proportional to the angular rate. It is noteworthy that the resonating motion of the mass and the lateral movement of the mass occur in a plane which is oriented perpendicular to the rotational axis of the rotary member. Capacitive sensing elements are then used to detect the lateral displacement and generate an applicable signal indicative of the lateral displacement. Exemplary rotational rate sensors include the ADXRS150 or ADSRS300 gyroscope devices commercially available from Analog Devices, or the ISZ-650 or IXZ-2500 gyroscope devices commercially available from InvenSense, Inc. It is readily understood that accelerometers, compasses, inertial sensors and other types of rotational motion sensors are contemplated by this disclosure. It is also envisioned that the sensor as well as other tool components may be incorporated into a battery pack or any other removable pieces that interface with the tool housing. - During operation, the
rotational motion sensor 22 monitors rotational motion of the sensor with respect to the longitudinal axis of theoutput member 11. A control module implemented by thecontroller 24 receives input from therotational motion sensor 22 and drives themotor 26 and thus theoutput member 11 based upon input from therotational motion sensor 22. For example, the control module may drive theoutput member 11 in the same direction as the detected rotational motion of the tool. As used herein, the term module may refer to, be part of, or include an Application Specific Integrated Circuit (ASIC); an electronic circuit; a combinational logic circuit; a field programmable gate array (FPGA); a processor (shared, dedicated, or group) that executes code; other suitable components that provide the described functionality; or a combination of some or all of the above, such as in a system-on-chip. The term module may include memory (shared, dedicated, or group) that stores code executed by the processor, where code, as used above, may include software, firmware, and/or microcode, and may refer to programs, routines, functions, classes, and/or objects. - Functionality for an
exemplary control scheme 80 is further described below in relation toFIG. 8A . During tool operation, angular displacement may be monitored by thecontroller 24 based upon input received from therotational motion sensor 22. Instep 81, a starting or reference point (θ) is initialized to zero. Any subsequent angular displacement of the tool is then measured in relation to this reference. In an exemplary embodiment, the control scheme is implemented as computer executable instructions residing in a memory and executed by a processor of thecontroller 24. - At any point during operation, the user may wish to reset the starting or reference point (θ). For example, the user's wrist may be rotated 40° clockwise, and the user wants to reverse the direction of the tool's operation. Instead of rotating back through the reference point and continuing to rotate to the left, the user may reset the reference point to be the current position (in this example, 40° clockwise). Any subsequent counterclockwise rotation from the new reference point will reverse the direction of the rotation of
output member 11. In the second exemplary embodiment (as shown inFigure 20 ), where holding in thetrigger switch assembly 50 is how the tool remains in a powered-up state, releasing thetrigger switch assembly 50 would reset the reference point. In an alternate embodiment, pressing the dedicated zero button 210 (as shown inFigure 21 ) would reset the reference point. Persons skilled in the art will recognize that other implementations can be envisioned, such as requiring the zerobutton 210 to be pressed and held for a short period of time in order to prevent accidental zeroing. - Angular displacement of the tool is then monitored at
step 82. In the exemplary embodiment, the angular displacement is derived from the rate of angular displacement over time or angular velocity (ωTOOL ) as provided by the gyroscope. While the rotational rate sensor described above is presently preferred for determining angular displacement of the tool, it is readily understood that this disclosure is not limited to this type of sensor. On the contrary, angular displacement may be derived in other manners and/or from other types of sensors. It is also noted that the signal from any rotational rate sensor can be filtered in the analog domain with discrete electrical components and/or digitally with software filters. - In this proposed control scheme, the motor is driven at different rotational speeds depending upon the amount of rotation. For example, the angular displacement is compared at 84 to an upper threshold. When the angular displacement exceeds an upper threshold θUT (e.g., 30° of rotation), then the motor is driven at full speed as indicated at 85. The angular displacement is also compared at 86 to a lower threshold. When the angular displacement is less than the upper threshold but exceeds a lower threshold θLT (e.g., 5° of rotation), then the motor is driven at half speed as indicated at 87. It is readily understood that the control scheme may employ more or less displacement thresholds as well as drive the motor at other speeds.
- Angular displacement continues to be monitored at
step 82. Subsequent control decisions are based on the absolute angular displacement in relation to the starting point as shown at 83. When the angular displacement of the tool remains above the applicable threshold, then the operating speed of the motor is maintained. In this way, continuous operation of the tool is maintained until the tool is returned to its original position. In the exemplary embodiment, returning the tool to its original position means that the user returns the tool to within 10° to 15° of the original position, for example. This creates a range around the reference point that allows for a small margin of user error. The user is not required to find the exact reference point that was set. On the other hand, when the tool operator rotates the tool in the opposite direction and angular displacement of the tool drops below (is less than) the lower threshold, then the output of the tool is modified at 190. In an exemplary embodiment, the voltage applied to the motor is discontinued at 190, thereby terminating operation of the tool. In an alternative embodiment, the speed at which the motor is driven is reduced to some minimal level that allows for spindle rotation at no load. Other techniques for modifying output of the tool are also envisioned. Threshold values may include hysteresis; that is, the lower threshold is set at one value (e.g. six degrees) for turning on the motor but set at a different value (e.g., four degrees) for turning off the motor, for example. It is also to be understood that only the relevant steps of the methodology are discussed in relation toFIG. 8A , but that other functionality may be needed to control and manage the overall operation of the system. - A variant of this control scheme 80' is shown in
FIGS. 8B . When the angular displacement is less than the upper threshold but exceeds a lower threshold θLT (e.g., 5° of rotation), then the motor speed may be set generally as a function of the angular displacement as indicated at 87'. More specifically, the motor speed may be set proportional to the full speed. In this example, the motor speed is derived from a linear function. It is also noted that more complex functions, such as quadratic, exponential or logarithmic functions, may be used to control motor speed. In another embodiment, the motor speed could be proportional to the displacement, velocity, acceleration, or a combination thereof (as shown inFIG. 8B , step 87'). - In either control scheme described above, direction of tool rotation may be used to control the rotational direction of the output member. In other words, a clockwise rotation of the tool results in a clockwise rotation of the output member, and a counterclockwise rotation of the tool results in a counterclockwise rotation of the output member. Alternatively, the tool may be configured with a switch that enables the operator to select the rotational direction of the output member.
- Persons skilled in the art will recognize that
rotational motion sensor 22 can be used in diverse ways. For example, themotion sensor 22 can be used to detect fault conditions and terminate operation. One such scheme is shown inFIG. 8C where, if the angular displacement is larger than the upper threshold θu (step 86), it could be advantageous to check whether the angular displacement exceeds on a second upper threshold θOT (step 88). If such threshold is exceeded, then operation ofscrewdriver 10 can be terminated (step 89). Such arrangement is important in tools that should not be inverted or put in certain orientations. Examples of such tools include table saws, power mowers, etc. - Similarly, operation of
screwdriver 10 can be terminated ifmotion sensor 22 detects a sudden acceleration, such as when a tool is dropped. - Alternatively, the control schemes in
FIGS. 8A-8C can be modified by monitoring angular velocity ofoutput member 11 about thelongitudinal axis 8 instead of angular displacement. In other words, when the angular velocity of rotation exceeds an upper threshold, such as 100°/second, then the motor is driven at full speed, whereas if the angular velocity is lower than the upper threshold but exceeds a lower threshold, such as 50°/second, then the motor is driven at half speed. - Alternatively, the control schemes shown in
FIGS. 8A-8C can be modified by monitoring angular acceleration instead of angular velocity. In other words, when the angular acceleration of rotation exceeds an upper threshold, such as 100°/ second per second, then the motor is driven at full speed, whereas if the angular acceleration is lower than the upper threshold but exceeds a lower threshold, such as 50°/ second per second, then the motor is driven at half speed. Alternatively, a combination of displacement, velocity, and/or acceleration could determine the control scheme. - With reference to
FIG. 18 , a ratchetingcontrol scheme 60 is also contemplated by this disclosure. During tool operation, the controller monitors angular displacement of the tool at 61 based upon input received from therotational motion sensor 22. From angular displacement, the controller is able to determine the direction of the displacement at 62 and drive themotor 26 to simulate a ratchet function as further described below. - In this proposed control scheme, the controller must also receive an indication from the operator at 63 as to which direction the operator desires to ratchet. In an exemplary embodiment, the
screwdriver 10 may be configured with a switch that enables the operator to select between forward and reverse ratchet directions. Other input mechanisms are also contemplated. - When the forward ratchet direction is selected by the operator, the controller drives the motor in the following manner. When the operator rotates the tool clockwise, the output member is driven at a higher ratio than the rotation experienced by the tool. For example, the output member may be driven one or more full revolutions for each quarter turn of the tool by the operator. In other words, the output member is rotated at a ratio greater than one when the direction of rotational motion is the same as a user selected ratcheting direction as indicated at 65. It may not be necessary for the user to select a ratchet direction. Rather the control may make a ratcheting direction decision based on a parameter, for example, an initial rotation direction is assumed the desired forward direction.
- On the other hand, when the operator rotates the tool counter clockwise, the output member is driven at a one-to-one ratio. Thus the output member is rotated at a ratio equal to one when the direction rotational motion is the opposite the user selected ratcheting direction as indicated at 67. In the case of the screwdriver, the bit and screw would remain stationary as the user twists the tool backward to prepare for the next forward turn, thereby mimicking a ratcheting function.
- The control schemes set forth above can be further enhanced by the use of multiple control profiles. Depending on the application, the tool operator may prefer a control curve that gives more speed or more control.
FIG. 9 illustrates three exemplary control curves. Curve A is a linear control curve in which there is a large variable control region. If the user does not need fine control for the application and simply wants to run an application as fast as possible, the user would prefer curve B. In this curve, the tool output ramps up and obtains full output quickly. If the user is running a delicate application, such as seating a brass screw, the user would prefer curve C. In this curve, obtaining immediate power is sacrificed to give the user a larger control region. In the first part of the curve, output power changes slowly; whereas, the output power changes more quickly in the second part of the curve. Although three curves are illustrated, the tool may be programmed with two or more control curves. - In one embodiment, the tool operator may select one of a set number of control curves directly with an input switch. In this case, the controller applies the control curve indicated by the input switch until the tool operator selects a different control curve.
- In an alternative embodiment, the controller of the tool can select an applicable control curve based on an input control variable (ICV) and its derivative. Examples of ICVs include displacement, velocity, and acceleration. The motor speed from the selected curve may be determined by either the same or some other variable. For example, the controller may select the control curve based on distance a trigger has traveled and the speed at which the user actuates the trigger switch. In this example, the selection of the control curve is not made until the trigger has traveled some predetermined distance (e.g., 5% of the travel range as shown in
FIG. 9A ) as measured from a starting position. - Once the trigger has traveled the requisite distance, the controller computes the speed of the trigger and selects a control curve from a group of control curves based on the computed speed. If the user simply wants to drive the motor as quick as possible, the user will tend to pull the trigger quickly. For this reason, if the speed of trigger exceeds some upper speed threshold, the controller infers that the user wants to run the motor as fast as possible and selects an applicable control curve (e.g., Curve B in
FIG. 9A ). If the user is working on a delicate application and requires more control, the user will tend to pull the trigger more slowly. Accordingly, if the speed of trigger is below some lower speed threshold, the controller infers the user desires more control and selects a different control curve (e.g., Curve C inFIG. 9A ). If the speed of the trigger falls between the upper and lower thresholds, the controller may select another control curve (e.g., Curve A inFIG. 9A ). Curve selection could be (but is not limited to being) performed with every new trigger pull, so the user can punch the trigger to run the screw down, release, and obtain fine seating control with the next slower trigger pull. - The controller then controls the motor speed in accordance with the selected control curve. In the example above, the distance travelled by the trigger correlates to a percent output power. Based on the trigger distance, the controller will drive the motor at the corresponding percent output in accordance with the selected control curve. It is noted that this output could be motor pulse width modulation, as in an open loop motor control system, or it could be motor speed directly, as in a closed loop motor control system.
- In another example, the controller may select the control curve based on a different input control variable, such as the angular distance the tool has been rotated from a starting point and its derivative, i.e., the angular velocity at which the tool is being rotated. Similar to trigger speed, the controller can infer that the user wants to run the motor as fast as possible when the tool is rotated quickly and infer that the user wants to run the motor slower when the tool is being rotated slowly. Thus, the controller can select and apply a control curve in the manner set forth above. In this example, the percentage of the input control variable is computed in relation to a predefined range of expected rotation (e.g., +/- 180 degrees). Selecting an applicable control curve based on another type of input control variable land its derivative is also contemplated by this disclosure.
- It may be beneficial to monitor the input control variable and select control curves at different points during tool operation. For example, the controller may compute trigger speed and select a suitable control curve after the trigger has been released or otherwise begins traveling towards its starting position.
FIG. 9B illustrates three exemplary control curves that can be employed during such a back-off condition. Curve D is a typical back off curve which mimics the typical ramp up curve, such as Curve A. In this curve, the user passes through the full range of analog control before returning to trigger starting position. Curve E is an alternative curve for faster shutoff. If the trigger is released quickly, the controller infers that the user simply wants to shut the tool off and allows the user to bypass most of the variable speed region. If the user backs off slowly, the controller infers that the user desires to enter the variable speed region. In this case, the controller may select and apply Curve F to allow the user better finish control, as would be needed to seat a screw. It is envisioned that the controller may monitor the input control variable and select an applicable control curve based on other types of triggering events which occur during tool operation. - Ramp up curves may be combined with back off curves to form a single selectable curve as shown in
FIG. 9C . In an exemplary application, the user wishes to use the tool to drive a long machine screw and thus selects the applicable control curves using the input switch as discussed above. When the user pulls the trigger, the controller applies Curve B to obtain full tool output quickly. When the user has almost finished running down the screw, the user releases the trigger and the controller applies Curve F, thereby giving the user more control and the ability to seat the screw to the desired tightness. - Selection of control curves may be based on the input control variable in combination with other tool parameters. For example, the controller may monitor output torque using known techniques such as sensing current draw. With reference to
FIG. 9D , the controller has sensed a slow trigger release, thereby indicating the user desires variable speed for finish control. If the controller further senses that output torque is high, the controller can infer that the user needs more output power to keep the fastener moving (e.g., a wood screw application). In this case, the controller selects Curve G, where the control region is shifted upward to obtain a usable torque. On the other hand, if the controller senses that output torque is low, the controller can infer that additional output power is not needed (e.g., a machine screw application) and thus select Curve H. Likewise, the controller may select from amongst different control curves at tool startup based on the sensed torque. Tool parameters other than torque may also be used to select a suitable control curve. - Selection of control curves can also be based on a second derivative of the input control variable. In an exemplary embodiment, the controller can continually compute the acceleration of the trigger. When the acceleration exceeds some threshold, the controller may select a different control curve. This approach is especially useful if the tool has already determined a ramp up or back off curve but the user desires to change behavior mid curve. For example, the user has pulled the trigger slowly to allow a screw to gain engagement with a thread. Once engaged, the user punches the trigger to obtain full output. Since the tool always monitors trigger acceleration, the tool senses that the user is finished with variable speed control and quickly sends the tool into full output as shown in
FIG. 9E . - Again, trigger input is used as an example in this scenario, but it should be noted that any user input control, such as a gesture, could be used as the input control variable. For example,
sensor 22 can detect when the user shakes a tool to toggle between control curves or even operation modes. For example, a user can shake a sander to toggle between a rotary mode and a random orbit mode. In the examples set forth above, the controller controls the motor speed in accordance with the same input control variable as is used to select the control curve. It is envisioned that the controller may control the motor speed with an input control variable that differs from the input control variable used to select the control curve. For example, motor speed may be set based on displacement of the trigger; whereas, the control curve is selected in accordance with the velocity at which the trigger is actuated. - Referring to
FIG. 7 , thescrewdriver 10 includes acurrent sensor 32 to detect current being delivered to themotor 26. It is disadvantageous for the motor of the tool to run at high current levels for a prolonged period of time. High current levels are typically indicative of high torque output. When the sensed current exceeds some predefined threshold, the controller is configured to modify tool output (e.g., shut down the tool) to prevent damage and signal to the operator that manually applied rotation may be required to continue advancing the fastener and complete the task. The tool may be further equipped with a spindle lock. In this scenario, the operator may actuate the spindle lock, thereby locking the spindle in fixed relation to the tool housing. This causes the tool to function like a manual screwdriver. - Referring to
FIG. 8D , in a related embodiment, in embodiments where the power tool described above has a spindle lock or self-locking gears, the current sensor and controller may control the motor so that, at high torque levels, the power tool can be used as a simulated manual, ratcheting screwdriver. Atstep 802, during operation of the power tool according to one of the control schemes inFIGS. 8A-8C , the controller monitors a current sense signal (ISENSE) from the current sensor, where ISENSE indicates the amount of current being delivered to the motor. Atstep 804, the controller compares ISENSE to a predetermined reference value IMAX, which indicates the maximum current that may be delivered to the motor. IMAX can be stored in memory and can be a fixed value or a user-selectable value. In many applications ISENSE and IMAX may correlate or be related to the output torque of the drive shaft. Atstep 806, if ISENSE does not exceed IMAX, then the controller continues to operate the power tool according to one of the control schemes set forth inFigs. 8A-8C . - At step, 808, if ISENSE exceeds IMAX for a predetermined amount of time, then the controller causes a reduced, but non-zero, amount of power (LOW-PWM) to be delivered to the motor in the direction that the motor and output shaft were previously being driven. This LOW-PWM is low enough so that the LOW-PWM signal cannot overcome the output torque being encountered by the tool shaft. For example, if ISENSE indicates that the current being delivered to the motor is greater than approximately 20 amps (e.g., approximately 25 amps) for at least 200 ms, then the controller operates to deliver a LOW-PWM signal to the motor that is less than approximately 20% (e.g., approximately 15%) of the maximum PWM duty cycle that was previously being delivered to the motor during normal operation. Therefore, if the user continues to rotate the tool housing in the driving direction of the motor, the user will need to manually apply a torque that is greater than the output torque, so that the tool functions as a manual screwdriver. If the user rotates the tool housing in the opposite direction, the LOW-PWM signal will make the output shaft remain effectively stationary relative to the workpiece, thus preventing rotating a fastener in the opposite direction. Thus, the power tool will act as a ratcheting screwdriver while in the LOW-PWM mode of operation. It should be understood that the control scheme of
FIG. 8D is not limited for use with the inertia control schemes ofFIGS. 8A-8C , but can also be used with a more traditional electric power tool or screwdriver that is operated by a switch or trigger. - For the above-described inertia-controlled tools, there may be no indication to the user that the tool is operational, for example, when the user depresses the
trigger switch assembly 50 but does not rotate the tool. Accordingly, thescrewdriver 10 may be further configured to provide a user-perceptible output when the tool is operational. Providing the user with haptic feedback is one example of a user-perceptible output. The motor drivencircuit 25 may be configured as an H-bridge circuit as noted above and inFIG. 7 . The H-bridge circuit is used to selectively open and close pairs of field effect transistors (FETs) to change the current flow direction and therefore the rotational direction of the motor. By quickly transitioning back and forth between forward and reverse, the motor can be used to generate a vibration perceptible to the tool operator. The frequency of a vibration is dictated by the time span for one period and the magnitude of a vibration is dictated by the ratio of on time to off time as shown inFIG. 10 . Other schemes for vibrating the tool also fall within the broader aspects of this disclosure. - Within the control schemes presented in
FIGS. 8A-8C , the H-bridge circuit 25 (as seen inFIG. 7 ) may be driven in the manner described above before the angular displacement of the tool reaches the lower threshold. Consequently, the user is provided with haptic feedback when the spindle is not rotating. It is also envisioned that user may be provided haptic feedback while the spindle is rotating. For example, the positive and negative voltage may be applied to the motor with an imbalance between the voltages such that the motor will advance in either a forward or reverse direction while still vibrating the tool. It is understood that haptic feedback is merely one example of a perceptible output and other types of outputs also are contemplated by this disclosure. - Vibrations having differing frequencies and/or differing magnitudes can also be used to communicate different operational states to the user. For example, the magnitude of the pulses can be changed proportionally to speed to help convey where in a variable-speed range the tool is operating. So as not to limit the total tool power, this type of feedback may be dropped out beyond some variable speed limit (e.g., 70% of maximum speed). In another example, the vibrations may be used to warn the operator of a hazardous tool condition. Lastly, the haptic feedback can be coupled with other perceptible indicators to help communicate the state of the tool to the operator. For instance, a light on the tool may be illuminated concurrently with the haptic feedback to indicate a particular state.
- Additionally, haptic feedback can be used to indicate that the output member has rotated 360°, or that a particular desired torque setting has been achieved.
- In another aspect of this invention, an automated method is provided for calibrating a gyroscope residing in the
screwdriver 10. Gyroscopes typically output a sensed-analog voltage (Vsense) that is indicative of the rate of rotation. Rate of rotation can be determined by comparing the sensed voltage to a reference voltage (e.g., rate=(Vsense-Vref)/scale factor). With some gyroscopes, this reference voltage is output directly by the gyroscope. In other gyroscopes, this reference voltage is a predetermined level (i.e., gyroscope supply voltage/2) that is set as a constant in the controller. When the sensed voltage is not equal to the reference voltage, rotational motion is detected. When the sensed voltage is equal to the reference voltage, no motion is occurring. In practice, there is an offset error (ZRO) between the two voltages (i.e., ZRO=Vsense-Vref). This offset error can be caused by different variants, such as mechanical stress on a gyroscope after mounting to a PCT or an offset error in the measuring equipment. The offset error is unique to each gyroscope but should remain constant over time. For this reason, calibration is often performed after a tool is assembled to determine the offset error. The offset error can be stored in memory and used when calculating the rotational rate (i.e., rate-(Vsense-Vref-ZRO/scale). - Due to changes in environmental conditions, it may become necessary to recalibrate the tool during the course of tool use. Therefore, it is desirable for the tool to be able to recalibrate itself in the field.
FIG. 11 illustrates an exemplary method for calibrating the offset error of the gyroscope in the tool. In an exemplary embodiment, the method is implemented by computer- executable instructions executed by a processor of thecontroller 24 in the tool. - First, the calibration procedure must occur when the tool is stationary. This is likely to occur once an operation is complete and/or the tool is being powered down. Upon completing an operation, the tool will remain powered on for a predetermined amount of time. During this time period, the calibration procedure is preferably executed. It is understood that the calibration procedure may be executed at other times when the tool is or is likely to be stationary. For example, the first derivative of the sensed voltage measure may be analyzed to determine when the tool is stationary.
- The calibration procedure begins with a measure of the offset error as indicated at 114. After the offset error is measured, it is compared to a running average of preceding offset error measurements (ZROavg). The running average may be initially set to the current calibration value for the offset error. The measured offset error is compared at 115 to a predefined error threshold. If the absolute difference between the measured offset error and the running average is less than or equal to the predefined offset error threshold, the measured offset error may be used to compute a newly-calibrated offset error. More specifically, the measurement counter (calCount) may be incremented at 116 and the measured offset error is added to an accumulator (ZROaccum) at 117. The running average is then computed at 118 by dividing the accumulator by the counter. A running average is one exemplary way to compute the newly-calibrated offset error.
- Next, a determination is made as to whether the tool is stationary during the measurement cycle. If the offset error measurements remain constant or nearly constant over some period of time (e.g., 4 seconds) as determined at 119, the tool is presumed to be stationary. Before this time period is reached, additional measurements of the offset error are taken and added to the running average so long as the difference between each offset error measurement and the running average is less than the offset error threshold. Once the time period is reached, the running average is deemed to be a correct measurement for the offset error. The running average can be stored in memory at 121 as the newly-calibrated offset error and subsequently used by the controller during the calculations of the rotational rate.
- When the absolute difference between the measured offset error and the running average exceeds the predefined offset error threshold, the tool must be rotating. In this case, the accumulator and measurement counter are reset as indicated at
steps - To prevent sudden erroneous calibrations, the tool may employ a longer-term calibration scheme. The method set forth above determines whether or not there is a need to alter the calibration value. The longer-term calibration scheme would use a small amount of time (e.g., 0.25 s) to perform short-term calibrations, since errors would not be critical if no rotational motion is sensed in the time period. The averaged ZRO would be compared to the current calibration value. If the averaged ZRO is greater than the current calibration value, the controller would raise the current calibration value. If the averaged ZRO is less than the current calibration value, the controller would lower the current calibration value. This adjustment could either be incremental or proportional to the difference between the averaged value and the current value.
- Due to transmission backlash, the tool operator may experience an undesired oscillatory state under certain conditions. While the gears of a transmission move through the backlash, the motor spins quickly, and the user will experience like reactionary torque. As soon as the backlash is taken up, the motor suddenly experiences an increase in load as the gears tighten, and the user will quickly feel a strong reactionary torque as the motor slows down. This reactionary torque can be strong enough to cause the tool to rotate in the opposite direction as the output spindle. This effect is increased with a spindle lock system. The space between the forward and reverse spindle locks acts similarly to the space between gears, adding even more backlash into the system. The greater the backlash, the greater amount of time the motor has to run at a higher speed. The higher a speed the motor achieves before engaging the output spindle, the greater the reactionary torque, and the greater the chance that the body of the tool will spin in the opposite direction.
- While a tool body's uncontrolled spinning may not have a large effect on tool operation for trigger-controlled tools, it may have a prominent and detrimental effect for rotation-controlled tools. If the user controls tool output speed through the tool-body rotation, any undesired motion of the tool body could cause an undesired output speed. In the following scenario, it can even create an oscillation effect. The user rotates the tool clockwise in an attempt to drive a screw. If there is a great amount of backlash, the motor speed will increase rapidly until the backlash is taken up. If the user's grip is too relaxed at this point, the tool will spin uncontrolled in the counterclockwise direction. If the tool passes the zero rotation point and enters into negative rotation, the motor will reverse direction and spin counterclockwise. The backlash will again be taken up, eventually causing the tool body to spin uncontrolled in the clockwise direction. This oscillation or oscillatory state may continue until tool operation ceases.
-
FIG. 15 depicts an exemplary method of preventing such an oscillatory state in thescrewdriver 10. For illustration purposes, the method works cooperatively with the control scheme described in relation toFIG. 8A . It is understood that the method can be adapted to work with other control schemes, including those set forth above. In an exemplary embodiment, the method is implemented bycontroller 24 in the tool. - Rotational direction of the output spindle is dictated by the angular displacement of the tool as discussed above. For example, a clockwise rotation of the tool results in clockwise rotation of the output member. However, the onset of an oscillatory state may be indicated when tool rotation occurs for less than a predetermined amount of time before being rotated in the opposing direction. Therefore, upon detecting rotation of the tool, a time is initiated at 102. The timer accrues the amount of time the output member has been rotating in a given direction. Rotational motion of the tool and its direction are continually being monitored as indicated at 103.
- When the tool is rotated in the opposite direction, the method compares the value of the timer to a predefined threshold (e.g., 50 ms) at 104. If the value of the timer is less than the threshold, the onset of an oscillatory state may be occurring. In an exemplary embodiment, the oscillatory state is confirmed by detecting two oscillations although it may be presumed after a single oscillation. Thus, a flag is set at 105 to indicate the occurrence of a first oscillation. If the value of the timer exceeds the threshold, the change in rotational direction is presumed to be intended by the operator and thus the tool is not in an oscillating state. In either case, the timer value is reset and monitoring continues.
- In an oscillatory state, the rotational direction of the tool will again change as detected at 103. In this scenario, the value of the timer is less than the threshold and the flag is set to indicate the preceding occurrence of the first oscillation. Accordingly, a corrective action may be initiated as indicated at 107. In an exemplary embodiment, the tool may be shut down for a short period of time (e.g., ¼ second), thereby enabling the user to regain control of the tool before operation is resumed. Other types of corrective actions are also contemplated by this disclosure. It is envisioned that the corrective action may be initiated after a single oscillation or some other specific number of oscillations exceeding two. Likewise, other techniques for detecting an oscillatory state fall within the broader aspects of this disclosure.
- In another arrangement, the tool may be configured with self-locking planetary gear set 90 disposed between the
output member 11 and adrive shaft 91 of themotor 26. The self-locking gear set could include any planetary gear set which limits the ability to drive the sun gear through the ring gear and/or limits the ability of the spindle to reverse. This limiting feature could be inherent in the planetary gear set or it could be some added feature such as a sprag clutch or a one way clutch. Referring toFIGS. 19A and 19B , one inherent method to limit the ability of a ring gear to back drive asun gear 92 is to add anadditional ring gear 93 as the output of the planetary gear set 94 and fix thefirst ring gear 95. By fixing thefirst ring gear 95, power is transferred through thesun gear 92 into the planetary gear set 94 into the second (unfixed, out)ring gear 93. - When torque is applied back through the
output ring gear 93 into the planetary gear set 94, the internal gear teeth on the output ring gear are forced into engagement with the corresponding teeth on the planetary gear set 94. The teeth on the planetary gear set 94 are then forced into engagement with the corresponding teeth on the fixed ring gear. When this happens, the forces on the planetary gears' teeth are balanced by the forces acting through theoutput ring gear 93 and the equal and opposite forces acting through the fixedring gear 95 as seen inFIG. 19B . When the forces are balanced, the planetary gear is fixed and does not move. This locks the planetary gear set and prevents torque from being applied to the sun gear. Other arrangements for the self-locking gear set are also contemplated by this disclosure. - The advantage of having a self-locking planetary gear set is that when the motor is bogged down at high torque levels during twisting operations such as, but not limited to, threaded fasteners, the tool operator can overcome the torque by twisting the tool. This extra torque applied to the application from the tool operator is counteracted by the forces within the self-locking planetary gear set, and the motor does not back drive. This allows the tool operator to apply additional torque to the application.
- In this arrangement, when the sensed current exceeds some predefined threshold, the controller may be configured to drive the motor at some minimal level that allows for spindle rotation at no load. This avoids stressing the electronics in a stall condition but would allow for ratcheting at stall. The self-locking planetary gears would still allow the user to override stall torque manually. Conversely, when the user turns the tool in the reverse direction to wind up for the next forward turn, the spindle rotation would advance the bit locked in the screwhead, thereby counteracting the user's reverse tool rotation.
- With reference to
FIG. 20 , a second exemplary power screwdriver is indicated generally by reference number 10'. This embodiment allows the user to hold the screwdriver 10' in the palm of the user's hand and actuate the trigger switch assembly 50' with the palm of the user's hand, most preferably the area of the palm that forms the base of the user's thumb. In this embodiment, the tool operator actuates the trigger switch assembly 50' to initiate tool operation. Given the orientation of the screwdriver 10' in the palm of the user's hand, it should be recognized that the trigger switch assembly 50' is actuated and remains depressed just by holding the screwdriver 10'. This allows for natural and intuitive use, where the user can simply hold the screwdriver 10' and turn it. - With reference to
FIGS. 5A-5C and20 , the trigger switch assembly 50' is substantially similar to thetrigger switch assembly 50. The trigger switch assembly 50' is comprised primarily of anelongated casing 52 that houses at least onemomentary switch 53 and a biasingmember 54, such as a spring. Theelongated casing 52 is movably coupled tohousing 200 in such a way that allows it to translate and/or pivot about any point of contact by the operator. For example, if the tool operator presses near the top or bottom of theelongated casing 52, the trigger switch assembly 50' pivots as shown inFIGS. 5A and 5B , respectively. If the tool operator presses near the middle of theelongated casing 52, the trigger switch assembly 50' is translated inward towards the tool body as shown inFIG. 5C . In any case, the force applied to theelongated casing 52 by the operator will depress at least one of the switches from an OFF position to an ON position. If there are two ormore switches 53, theswitches 53 are arranged electrically in parallel with each other (as shown inFIG. 7 ) such that only one of the switches needs to be actuated to power up the tool. When the operator releases the trigger, the biasingmember 54 biases theelongated casing 52 away from the tool, thereby returning each of the switches to an OFF position. The elongated shape of the casing helps the operator to actuate the switch from different grip positions. It is envisioned that the trigger switch assembly 50' may be comprised of more than twoswitches 53 and/or more than one biasingmember 54 as shown inFIGS. 6A-6.C . This embodiment otherwise functions as described for the previous embodiment. - With reference to
FIG. 21 , a third exemplary power screwdriver is indicated generally byreference number 10". In this embodiment, the tool operator actuates thetrigger switch assembly 50" with the user's index finger to power up thescrewdriver 10". Thetrigger switch assembly 50" functions as an ON/OFF switch. Once the user presses and releases thetrigger switch assembly 50", thescrewdriver 10" is in an ON state (i.e., the battery is connected to the controller and other electronic components). Rotational motion is detected and acted upon only when the tool is powered up. When the operator places the switch in an OFF position, the tool is powered down and is no longer operational. Thescrewdriver 10" remains in the ON state until the user turns it off by pressing and releasing thetrigger switch assembly 50" again. It is also contemplated that thescrewdriver 10" will automatically shut off after a period of inactivity, and thetrigger switch assembly 50" may be implemented in other ways. -
Output member 11 rotates around longitudinal axis 8' based on angular displacement as described above. In other words, the user rotates thescrewdriver 10" to driveoutput member 11. In this third embodiment, a zerobutton 210 allows the user to reset the starting or reference point as previously described. - The tool may be further configured with a
reaming tool 214 disposed between thesecond housing portion 14 and theoutput member 11. For example, a user may wish to refine a hole drilled using the tool or remove burrs from the cut end of a piece of conduit. This embodiment has two modes of operation: themotor 26 either drives theoutput member 11 or thereaming tool 214. In one arrangement, the mode is selected manually by the user as shown inFIGS. 22A-22B and described below. In another arrangement, the mode is selected by applying either theoutput member 11 or thereaming tool 214 to a workpiece in order to usescrewdriver 10" as a screwdriver or a reamer, respectively, as shown inFIGS. 23A-23B and described below. Other means for selecting the mode of operation are also contemplated by this disclosure. - Other reaming tool variations are contemplated. In an alternative embodiment, the reaming tool would oscillate. For example, the user's wrist remains rotated clockwise, and the reaming tool rotates in a clockwise direction for a short time period, reverses direction for a short time period, repeating until operation is terminated. In another alternative embodiment, the reaming tool would have a pulse mode. If the drive signal is pulsed, a spike in the torque output might facilitate overcoming a burr. In still another alternative embodiment, the power tool could have multiple gears associated with it. At lower speeds, higher torque could be achieved while at higher speeds, lower torque would be sufficient for driving screws, for example.
-
FIGS. 22A-22B show an exemplary clutch mechanism for selectively engaging the reaming tool 214 (to operatescrewdriver 10" as a reamer) or the output member 11 (to operatescrewdriver 10" as a screwdriver). It is to be understood that the representation of thereaming tool 214 inFIGS. 22A-22B has been simplified from its depiction inFIG. 21 in order to more clearly convey the mode switching. - In this exemplary embodiment, the user rotates a
collar 240 between two positions to select the mode of operation. It should be understood that this collar could also be implemented to translate between the two positions while remaining rotationally fixed. Thecollar 240 is attached to agrounding ring 228. When thegrounding ring 228 is in the rearward position as shown inFIG. 22A , thegrounding ring 228 engages aplanet carrier 236 and prevents it from rotating. In this configuration, the motor drives theplanets 237 to rotate about the pins of theplanet carrier 236, causing thering gear 232 to rotate. This drives thereaming tool 214 while theoutput member 11 remains fixed, and as such,screwdriver 10" operates as in reamer mode. When thegrounding ring 228 is in the forward position as shown inFIG. 22B , theplanet carrier 236 is free to rotate, and thering gear 232 is fixed. In this configuration, the motor drives theplanets 237 which in turn drives theoutput member 11, and as such,screwdriver 10" operates in screwdriver mode. It is envisioned that in an alternative embodiment, thering gear 232 and theplanet carrier 236 may be fixed to one another and free to rotate at the same time. -
FIGS. 23A and 23B illustrate another exemplary clutch mechanism for selecting the mode of operation. In this embodiment, adog type clutch 238 is used to selectively engage thereaming tool 214. It is to be understood that the representation of thereaming tool 214 inFIGS. 23A-23B has been simplified from its depiction inFIG. 21 in order to more clearly convey the mode switching. - In this arrangement,
screwdriver 10" operates as a screwdriver as shown inFIG. 23A unless the user applies thereaming tool 214 to aworkpiece 230. If no force is applied to the reaming tool, thedog clutch 238 is not engaged, and theoutput member 11 is free to rotate. To operatescrewdriver 10" as a reamer, the user applies thereaming tool 214 to aworkpiece 230. This bias load applies a force to the compression springs 234, as shown inFIG. 23B . This engages thedog clutch 238, which causes thereaming tool 214 to rotate with theoutput member 11..This embodiment otherwise functions the same as the other embodiments discussed above. - Referring to
FIGS. 24-27 , in other embodiments, areaming attachment 300 may be coupled to anoutput shaft 312 of apower tool 310. Thepower tool 310 may be similar to the above-describedscrewdriver 10 that is driven according to rotation of the tool housing as sensed by a rotational motion sensor. In other embodiments, thepower tool 310 may be an ordinary power drill, power driver, or power screwdriver that is driven according to actuation of an on-off power switch or a variable speed trigger switch. - Referring to
FIG. 24 , the reamingattachment 300 includes a drivingshaft 302 integral with theoutput shaft 312 for rotation with theoutput shaft 312 about a longitudinal axis X. In the embodiment ofFIG. 24 , the drivingshaft 302 is permanently attached to theoutput shaft 312 of thepower tool 310. However, referring toFIG. 27 , in other embodiments, a similar reaming attachment 300' may include a driving shaft 302' having a hex fitting 303' that can be removably coupled to an output shaft of a power tool, e.g., by a quick-release tool holder, a chuck, or a hex tool holder. In other embodiments, a driving shaft can be removably coupled to an output shaft, e.g., by a threaded connection, a friction fit coupling, a snap-fit connector, and/or a bayonet connection. - The driving
shaft 302 non-rotationally carries ascrewdriving portion 320 and a reamingportion 330. Unlike the embodiments ofFIGS. 22A-23B , thescrewdriving portion 320 and the reamingportion 330 always rotate together with the drivingshaft 302 about the axis X, and thus together with theoutput shaft 312 of thepower tool 310. - The reaming
portion 330 includes afront body portion 332 and arear body portion 340 that are non-rotationally carried by the drivingshaft 302. Thefront body portion 332 has a stepped configuration with a plurality ofcylindrical steps 334 that increase in diameter from front to rear. Adjacentcylindrical steps 334 are connected byfrustroconical surfaces 336. Therear body portion 340 comprises a generallycylindrical disc 342. Therear body portion 340 is axially fixed to the drivingshaft 302 and abuts the housing front end of thepower tool 310. Thefront body portion 332 is axially moveable relative to the drivingshaft 302 and is biased away from therear body portion 340 by acompression spring 344 disposed between thefront body portion 332 and therear body portion 340. - The front and
rear body portions radial slots axial slots reaming blade 350. Theblade 350 has arear end 352 axially fixed to therear body portion 340, and a workingend 354 that remains stationary relative to the drivingshaft 302 when thefront body portion 340 moves axially. The workingend 354 has a stepped configuration with a plurality of hook shaped cutting surfaces 356, each having a diameter corresponding to one of thecylindrical steps 334 on thefront body portion 332. - In operation, when the
power tool 310 causes theoutput shaft 312 to rotate about its axis, theoutput shaft 312 causes the drivingshaft 302,screwdriving portion 320, and the front andrear bodies portion 340 to rotate simultaneously about the longitudinal axis X. As shown inFIG. 25 , the reamingattachment 320 may be used to drive afastener 360 into a workpiece W (as shown inFIG. 25 ). Ascrewdriving bit 362 is inserted into thebit holding portion 322. Thefront body 332 remains biased in its forward-most position, so that the cutting surfaces 356 of theblade 350 are not exposed. The drivingshaft 302 causes thescrewdriving bit 362 to rotate to drive thescrew 360 into the workpiece. - As shown in
FIGS. 26A and26B , the reamingattachment 230 may also be used to ream theedge 370 of a pipe P to remove burrs or shavings. As shown inFIG. 26A , the front body is inserted into the pipe P until one of the steppedcylindrical surfaces 334 orconical surfaces 336 abut against theedge 370 of the pipe P. Referring toFIG. 26B , as further axial bias is applied to thepower tool 310, thefront body 332 retracts rearward in a direction R against the force ofspring 344. This retraction of thefront body 332 causes the cutting surfaces 356 of theblade 350 to be exposed. One of the hook shaped cuttingsurfaces 356 hooks around theedge 370 of the blade. As the drivingshaft 302 rotates, the cuttingsurface 356 rotates to remove material from theedge 370 of the pipe P. When the reaming is complete, thefront portion 332 is removed from the pipe P and moves axially forward opposite the direction R, to cause apparent retraction of the cutting surfaces 356. - Referring to
FIGS. 25A-25C , thescrewdriving portion 320 includes abit holding portion 322 formed at the front end of the drivingshaft 302. Thebit holding portion 322 is formed with aninternal bore 324 configured to retain abit 362, such a screwdriving bit, for driving a fastener (e.g., screw 360) into a workpiece W. Thebit holding portion 322 may include a bit retention assembly for holding thebit 362 in theinternal bore 324. For example, referring toFIGS. 25B and25C , abit retention assembly 380 includes ashaft 412 having asidewall 413 defining theinternal bore 324 in the form of a polygonal (e.g., hexagonal) cavity. - The stepped
front body 332 of thereamer portion 340 functions as an actuator sleeve and is disposed around afirst end 424 of theshaft 412. The steppedfront body 332 engages a retainer 426 (e.g., a ball) that is received in agroove opening 428 of thesidewall 413 of theshaft 412. In inside wall of the steppedfront body 332 includes aninternal ramp portion 432 and an internalcylindrical portion 433 that each can selectively abut theretainer ball 426. Aretainer spring 430 substantially surrounds theshaft 412 and biases theretainer ball 426 in a forward direction (best shown inFIG. 25C ). Theretainer spring 430 can be a helical compression spring having ahelix portion 430a and ending at a bend portion that transitions to an inwardly projecting portion that is received at least partially in thegroove opening 428 to bias theretainer 426 in a forward direction toward thefront end 424 of theshaft 412. A rearward portion of theretainer spring 430 is disposed against a forward facing shoulder 412a of theshaft 412. - An
actuator spring 436 biases the steppedfront body 332 in a rearward direction relative to thefirst end 424 of theshaft 412. Aretainer clip 440 is received in a recessed groove 442 in thefirst end 424 of theshaft 412 for supporting awasher 444 against a forward end of theactuator spring 436. A second end of theactuator spring 436 is received against aninterior shoulder portion 445 of the steppedfront body 332 in order to bias the steppedfront body 332 in a rearward direction relative to thefirst end 424 of theshaft 412. - In its rest position, the stepped
front body 332 is positioned over thebit holding portion 322 so that the innercylindrical portion 433 abuts theball 426 and biases the ball radially inwardly. When thebit 362 is inserted into theinternal bore 324, the end of thebit 362 engages theball 426, pushing theball 426 rearward against the force of the theretainer spring 430. As theball 426 moves rearward in thegroove opening 428, it also moves radially outward along theinternal ramp 432, providing clearance for further insertion of the bit. Once thebit 362 is fully inserted into thebore 324, thespring 430 causes theball 426 to move forward and radially inward to engage a notch or groove 363 in thebit 362. The innercylindrical surface 433 now pushes the ball 462 radially inward to retain thebit 362 in thebore 324. - In order to release the bit 326 from the
bit retention device 380, the steppedfront body 332 is pulled in a forward direction against the force of thespring 436. This causes theramp 432 to be axially aligned with the ball 462 so that the ball can move radially outward along the surface of the ramp. Thus, the ball no longer tightly engages thegroove 363 in the bit, enabling thebit 362 to be removed from thebore 324. - In other embodiments, the
bit retention device 380 may include a plunger for ejecting the bit from the bore when the ball is not engaging the bit. In yet other embodiments, other types of bit retention mechanisms may be used, such as, for example, a hog ring, a retention clip, or a magnet. Examples of other retention mechanisms can be found, e.g., inU.S. Patent App. Pub. No. 2012/0326401 , which is incorporated by reference. In further embodiments, the drivingshaft 302 may be formed with a screwdriving or nut driving head portion, or another type of rotational driving implement. - With reference to
FIGS. 28A and 28B , in another exemplary embodiment, a rotary power tool in the form of aratchet wrench 510 may include the above or below described embodiments of an improved user input control. Exemplary components and features of theratchet wrench 510 are described below. While the following description is provided with reference to aratchet wrench 510, it should be readily understood to one of ordinary skill in the art that the broader aspects of the present disclosure are applicable to other types of power tools that have an output axis at an angle to a rotatable axis of the motor, including but not limited to other power tools that have an elongated housing aligned perpendicularly to a rotational axis of an output member of the tool, e.g., a right angle drill or right angle screwdriver. - The
ratchet wrench 510 is a right angle socket wrench and includes anelongated housing 512 having alongitudinal axis 509. Thehousing 512 may be formed from two or more housing shells that cooperate to define an internal cavity. Thehousing 512 is configured to receive amotor 526, atransmission 515 coupled to an output of themotor 526, and an intermediaterotatable shaft 519 rotatably coupled to an output of thetransmission 515. Coupled to thehousing 512 is a ratchetinghead 521 having aratcheting mechanism 523 coupled to an output of theintermediate shaft 519, and an output member or driveshaft 511, where therotational axis 508 of theoutput member 511 is arranged generally perpendicular to thelongitudinal axis 509 of thehousing 512.. - The
drive shaft 511 is configured to rotate about itsrotational axis 508 in a ratcheting manner in one direction (either clockwise or counterclockwise) when theintermediate shaft 519 is rotated by the motor in either a clockwise or a counterclockwise direction. The ratchetinghead 521 further includes amechanical switch 525 that enables the rotational direction of theoutput shaft 511 to be switched between ratcheting in the clockwise direction and ratcheting in the counterclockwise direction, regardless of the direction of rotation of the intermediate shaft. Further details regarding operation of the ratcheting head can be found in prior art ratcheting wrenches, including, e.g.,U.S. Patent Nos. 6,490,953 and7,793,568 , which are hereby incorporated by reference. In the alternative, the ratcheting head may have other types of transmission mechanisms that do not ratchet, but that only change the direction of rotation by a right angle, right angle or bevel gears, as will be understood by one of ordinary skill in the art. - The
output member 511 may has a polygonal shape (e.g., a square) for being received in a corresponding polygonal opening in a socket wrench accessory. In an alternative embodiment, a chuck or another type of tool holder may be affixed to the end of theoutput member 511. Further details regarding an exemplary bit holder are set forth inU.S. Patent Application No. 12/394,426 which is incorporated herein by reference. - The
housing 512 may also receive or be coupled to a rechargeable and/orremovable power source 528 such as a battery pack with one or more battery cells. Alternative, the power source may be an AC power plug coupled to the housing. An on-off switch 553 may be coupled to thehousing 512 and may control power-up of the tool as discussed below. Acontrol circuit 530 may be disposed on one or more circuit boards inside of the housing and in electrical communication with theswitch 553 and thepower source 528. As shown schematically inFIG. 29 , thecontrol circuit 530 includes arotational rate sensor 522 and amicrocontroller 524 as well as other circuitry for interfacing with thepower source 528, the on-off switch 553, and themotor 526 and for operating the tool. Thecontrol circuit 530 may operate according to one of the control methods discussed above with respect to the other embodiments of power tools, or according to one of the alternative control methods discussed below. - The
rotational rate sensor 522 may be spatially separated in a radial direction from the rotational axis of theoutput member 511 and may be oriented so that it senses rotational movement about theaxis 508 of theoutput member 511. Amotor drive circuit 525 enables voltage from thepower source 528 to be applied across themotor 526 in either direction. In the exemplary embodiment, themotor drive circuit 525 comprises an H-bridge circuit arrangement although other arrangements are contemplated. Thecontrol circuit 530 of thewrench 510 may also include atemperature sensor 531, acurrent sensor 532, atachometer 533 and/or aLED 535. In addition, thecontroller 524 may be coupled to adirection switch module 540 that can be actuated by the user to indicate a desired direction of rotation of the output shaft. - In the exemplary embodiment, the
rotational motion sensor 522 is gyroscope, such as a MEMS gyroscope. The operating principle of the gyroscope is based on the Coriolis effect. Briefly, the rotational rate sensor may be comprised of one or more resonating masses. When the power tool is subject to rotational motion about the axis of the output member, the resonating mass will be laterally displaced in accordance with the Coriolis effect, such that the lateral displacement is directly proportional to the angular rate. It is noteworthy that the resonating motion of the mass and the lateral movement of the mass(es) occur in one or more planes which may be orientated perpendicular to therotational axis 508 of theoutput shaft 511. Sensing elements in the gyroscope detect the lateral displacement of the mass(es) and generate an applicable signal indicative of the lateral displacement. An exemplary rotational rate sensor is the ADXRS150 or ADXRS300 gyroscope device commercially available from Analog Devices, or the ISZ-650 or IXZ-2500 gyroscope devices commercially available from InvenSense, Inc. [0001] While therotational rate sensor 522 described above is presently preferred for determining angular displacement of the tool, it is readily understood that this disclosure is not limited to this type of sensor. On the contrary, angular displacement may be derived in other manners and/or from other types of sensors. It is also noted that the signal from any rotational rate sensor can be filtered in the analog domain with discrete electrical components and/or digitally with software filters. It is readily understood that accelerometers, compasses, inertial sensors and other types of rotational motion sensors are contemplated by this disclosure. It is also envisioned that the rotational sensor as well as other tool components may be incorporated into a battery pack or any other removable pieces that interface with the tool housing. - During operation, the
rotational motion sensor 522 senses and monitors rotational motion of thehousing 512 with respect to therotational axis 508 of theoutput member 511. A control module implemented by thecontroller 524 receives input from therotational motion sensor 522 and drives themotor 526 and thus theoutput member 511 based upon input from therotational motion sensor 522. As used herein, the term module may refer to, be part of, or include an Application Specific Integrated Circuit (ASIC); an electronic circuit; a combinational logic circuit; a field programmable gate array (FPGA); a processor (shared, dedicated, or group) that executes code; other suitable components that provide the described functionality; or a combination of some or all of the above, such as in a system-on-chip. The term module may include memory (shared, dedicated, or group) that stores code executed by the processor, where code, as used above, may include software, firmware, and/or microcode, and may refer to programs, routines, functions, classes, and/or objects. - In
power tool 510, thecontrol circuit 530 and its control method operate such that user rotation of the housing about therotational axis 508 of theoutput shaft 511 is used to control motor operation. In an exemplary embodiment, rotational motion of the tool about therotational axis 508 of theoutput member 511 is monitored using therotational motion sensor 522. The angular velocity, angular displacement, and/or direction of rotation can be sensed and used as a basis for driving themotor 526 and thus theoutput shaft 511. With the proposed control circuit and method, the control input and the resulting output occur as rotation about the same axis. This results in a highly intuitive control similar to the use of a manual wrench. In an exemplary embodiment, the control scheme is implemented as computer executable instructions residing in a memory and executed by a processor of thecontroller 524. - This type of control scheme requires the tool to know when the operator would like to perform work. One possible solution is actuation of the on/off
switch 553 that the tool operator actuates to begin work. For example, theswitch 553 may be include a pushbutton switch accessible on the exterior of the tool housing. When the operator depresses the pushbutton switch 513 a first time, the tool is powered up (i.e., battery is connected to the controller and other electronic components). Rotational motion is detected and acted upon only when the tool is powered up. When the operator depresses the pushbutton switch 513 a second time, the tool is powered down and thus no longer operational. In another example, the on/offswitch 513 may be a single pole, single throw switch accessible on the exterior of the tool. When the operator places the switch in an ON position, the tool is powered up. When the operator places the switch in an OFF position, the tool is powered down and no longer operational. - One exemplary
power control scheme 540 for thetool 510 is illustrated inFIG. 30A . Atstep 541, a starting or reference point (θ) is initialized to zero. Any subsequent angular displacement of the tool is then measured in relation to this reference. Atstep 542, angular displacement (Δθ) of the tool is monitored. The angular displacement may be derived from the rate of angular displacement over time or angular velocity as provided by therotational rate sensor 522. Atstep 543, the reference value (θ) is set to be the previous reference value plus the change in angular displacement (Δθ). Atstep 544, the controller determines whether the new reference value indicates that the tool has been rotated in the clockwise direction. If so, then atstep 545, the controller drives the motor to rotate. If not, then atstep 546, the controller determines whether the new reference value indicates that the tool has been rotated in the counterclockwise direction. If so, then atstep 545, the controller drives the motor to rotate. Whenever the motor rotates, regardless of the direction of rotation of the housing, theoutput shaft 511 will rotate in the direction set by theswitch 525. - Subsequent control decisions are based on the absolute angular displacement in relation to the starting point as shown at 543. When the angular displacement of the tool remains above the applicable threshold, then the operating speed of the motor is maintained. In this way, continuous operation of the tool is maintained until the tool is returned to its original position. On the other hand, when the tool operator rotates the tool in the opposite direction and angular displacement of the tool drops below (is less than) a lower threshold, then operation of the motor is terminated at 548. Threshold values may include hysteresis; that is, the lower threshold is set at six degrees for turning on the motor but set at four degrees for turning off the motor, for example. It is also to be understood that only the relevant steps of the methodology are discussed above in relation to
FIG. 30A , but that other functionality may be needed to control and manage the overall operation of the wrench. - Another exemplary
power control scheme 640 for thetool 510 is illustrated inFIG. 30B . In this control scheme, the power tool is configured so that the motor only rotates when thehousing 512 is rotated in the same direction as theswitch 525 has been set for rotating theoutput shaft 511. For example, if theswitch 525 has been set to ratchet in the clockwise direction, the motor will only rotate if thehousing 512 is also rotated in the clockwise direction by about theoutput shaft axis 508. If thehousing 512 is rotated in the counterclockwise direction, then the motor will not rotate. Similarly, if the switch has been set to ratchet in the counterclockwise direction, the motor will only rotate if the housing is also rotated in the counterclockwise direction about theoutput shaft axis 508. If thehousing 512 is rotated in the clockwise direction, then the motor will not rotate. - For this control scheme, it is necessary for the controller to know the position of the
directional control switch 525.FIGS. 31A-31C illustrate an exemplarydirection switch module 550 that is coupled to thedirection control switch 525 for this purpose. In the exemplary embodiment, thedirection control switch 525 is a knob that can be moved among three positions: left, center and right. The knob is coupled directly to aslide bar 552 having atoothed portion 554. As the knob is moved from the left position to the right position or vice versa, the tooth of the slid bar engages awheel 556 of a switching mechanism, rotating the wheel and thereby determining the rotational direction of the ratcheting mechanism. When theswitch 525 is moved to the left position as shown inFigure 31A , the direction of the ratcheting mechanism is set to counter-clockwise. When theswitch 525 is moved to the right position as shown inFigure 31C , the direction of the ratcheting mechanism is set to clockwise. Further details regarding an exemplary switching mechanism are set forth inU.S. Patent Nos. 3,529,498 and3,621,738 which are incorporated herein by reference. - When positioned in either the left or right positions, the
toothed portion 554 of theslide bar 552 also closes a set of electrical contacts, thereby communicating the position of theslide bar 552 to thecontroller 524. This will enable the controller to drive the motor only when the tool housing is rotated in the direction set by the position of the actuator as will be further described below. For example, when theslide bar 552 is in the left position, as shown inFIG. 31A , thetoothed portion 554 electrically connects leftelectrical contact 556 and centerelectrical contact 558 to indicate to the controller that the user desires to operate the tool in only the counterclockwise direction. When theslide bar 552 is in the right position, as shown inFIG. 31C , thetoothed portion 554 electrically connects a rightelectrical contact 560 and the centerelectrical contact 558 to indicate to the controller that the user desires to operate the tool only in the clockwise direction. When theslide bar 552 is in the center position, as shown inFIG. 31B , thetoothed portion 554 does not electrically connect the centerelectrical contact 558 to either the leftelectrical contact 556 or the rightelectrical contact 560, which indicates to the controller that the user does not desire to operate the tool. Other types of switches and sensors for switches could be substituted, as will be apparent to one of ordinary skill in the art. - Referring again to
FIG. 30B , atstep 641, a starting or reference point (θ) is initialized to zero. Any subsequent angular displacement of the tool is then measured in relation to this reference. Atstep 642, angular displacement (Δθ) of the tool is monitored. The angular displacement may be derived from the rate of angular displacement over time or angular velocity as provided by therotational rate sensor 522. Atstep 643, the reference value (θ) is set to be the previous reference value plus the change in angular displacement (Δθ). Atstep 644, the controller determines whether the new reference value indicates that the housing has been rotated in the clockwise direction about the axis 608. If so, then at step 647, the controller determines whether theswitch 525 is also set to rotate the output shaft in the clockwise direction. If so, then atstep 545, the controller drives the motor to rotate (the motor can be rotated in either direction). If not, then, atstep 648, the controller terminates operation of the motor. - If at
step 644, the controller determines that the new reference value does not indicate that the housing has been rotated in the clockwise direction about theaxis 508, then atstep 646, the controller determines whether the new reference value indicates that the tool has been rotated in the counterclockwise direction. If so, then atstep 649, the controller determines whether theswitch 525 is also set to rotate the output shaft in the counterclockwise direction. If so, then atstep 645, the controller drives the motor to rotate (in either direction). Whenever the motor rotates, regardless of the direction of rotation of the housing, theoutput shaft 511 will rotate in the direction set by theswitch 525. - Subsequent control decisions are based on the absolute angular displacement in relation to the starting point as shown at 643. When the angular displacement of the tool remains above the applicable threshold, then the operating speed of the motor is maintained. In this way, continuous operation of the tool is maintained until the tool is returned to its original position. On the other hand, when the tool operator rotates the tool in the opposite direction and angular displacement of the tool drops below (is less than) a lower threshold, then operation of the motor is terminated at 648. Threshold values may include hysteresis; that is, the lower threshold is set at six degrees for turning on the motor but set at four degrees for turning off the motor, for example. It is also to be understood that only the relevant steps of the methodology are discussed above in relation to
FIG. 30B , but that other functionality may be needed to control and manage the overall operation of the wrench. - It should be understood, that in the control schemes described with respect to
FIGS. 30A and30B , the motor may be driven at a variable speed having some relationship to the amount or rate of rotation of thehousing 512 about theaxis 508, as described above with respect to the other embodiments. In addition, it should be understood, that the control schemes ofFIGS. 30A and30B may incorporate the haptic feedback algorithms discussed above to indicate to the user when the tool is active and ready for use. It should also be understood that the control schemes ofFIGS. 30A and30B may be used with in-line ratcheting screwdrivers or other in-line tools where the output axis is coincident or parallel to the axis of the motor and/or the housing or handle. -
FIGS. 32A and 32B illustrate an alternative embodiment of a power socket wrench 510'. The wrench 510' is similar to thewrench 510 described above except that the wrench 510' is equipped with two drive squares 515', 516', one extending from each side of aratchet head 517'. The drive squares are configured to receive a socket as is readily known in the art. In this variant, the motor and the output shaft only need to be driven in one direction regardless of the direction of rotation of the housing because one of the drive squares 515' can be used for clockwise ratcheting rotation, while the other of the drive squares 516' can be used for counterclockwise ratcheting rotation. Thus, there is no need for a mechanical switch for switching between clockwise and counterclockwise rotation. Depending on the desired direction, the user selects the appropriate side of the ratchet head to apply to the workpiece. - Thus, the wrench 510' may be programmed to operate according to the control scheme of
FIG. 30A , described above. That is, the tool operator actuates an on/off switch 513' in order to power up the tool and begin work. To drive the motor, the user rotates the tool housing about the rotational axis of the drive squares. Angular displacement of the tool housing is monitored in relation to a zero position. The motor is driven once the angular displacement exceeds a minimum displacement threshold and continues until the tool housing is rotated back to the zero position. It is understood that the motor is driven in a fixed direction which is independent of the direction the tool housing is rotated. - Referring to
FIGS. 33-36 , in another implementation of the present disclosure, one of the motor control schemes described above may be incorporated into a rotary impactdriver power tool 760. Theimpact driver 760 is comprised generally of ahousing 762 having a shape like a conventional power drill. Thehousing 762 defines ahandle portion 763 which is gripped by a user during tool operation. Anoutput member 764 that includes a tool bit holder extends from one end of the housing and is configured to rotate about itsrotational axis 765. In one embodiment, the rotational axis of theoutput member 764 may be angled relative to a longitudinal axis of the handle portion 763 (e.g., substantially perpendicular). Amotor 766 residing in thehousing 762 is drivably connected to theoutput member 764 to impart rotary motion thereto. Animpact mechanism 767 is interposed between themotor 766 and theoutput member 764. Further details regarding an exemplary impact mechanism are set forth inU.S. Patent No. 5,016,501 andU.S. Patent Application Pub. Nos. 2007/0267207 and2010/0071923 , which are incorporated herein by reference. Other exemplary impact mechanisms can be found in IDS600 Impact Screwdriver and FDS600 Impact Screwdriver commercially available from Black & Decker and in the DCF895 Impact Driver, DCF896 Impact Driver, and the DCF880 Impact Wrench available commercially from DeWALT Industrial Tool Co. - Referring to
FIGS. 35 and36 , theimpact driver 760 includes a printedcircuit board 770 to which is mounted a microcontroller, rotational motion sensor (e.g., a gyroscope) and other control electronics, similar to the components of the control circuit ofFIG. 7 , described above. The printedcircuit board 770 has afront end portion 776 and arear end portion 772. Thefront end portion 776 is sandwiched between a pair of elastomeric dampers 782 (or springs), one of which is coupled to anexterior wall 778 of thehousing 762, and the other of which is coupled to a fixedinterior wall 780 of thehousing 762. Thedampers 782 are oriented to dampen vibrations in a direction Y that is substantially perpendicular to the longitudinal axis L of the motor and output shaft. - The
rear end portion 772 of the printedcircuit board 770 is fixedly connected to a floatingshoe 774 that is not fixedly connected to the housing. A dependingportion 784 of theshoe 774 is coupled to a plurality of elastomeric dampers 786 (or springs) that abut theinterior wall 780 of the housing and another portion of the housing. Thedampers 786 are oriented to dampen vibrations in a direction X that is substantially parallel to the longitudinal axis L. Thedampers - To operate the impact driver, the tool operator actuates an on/off
switch 761 in order to power up the tool and begin work. The user rotates thetool housing 763 about the rotational axis of theoutput member 764 to drive the motor. Angular displacement of the tool housing is monitored in relation to a zero position. In one embodiment, the motor is driven once the angular displacement exceeds a minimum displacement threshold and continues until the tool housing is rotated back to the zero position. When the tool housing is rotated in a clockwise direction, the motor is driven is a clockwise direction. When the tool housing is rotated in a counter-clockwise direction, the motor is driven in a counter-clockwise direction. Thus, the rotational direction of the motor is determined by the rotational motion of the tool housing. The impact driver may otherwise operate in a manner similar to one or more of the control schemes described above (e.g., with respect toFIGS. 8A-8C ,9A-9E, 18, 30A, and 30B . - The foregoing description of the embodiments has been provided for purposes of illustration and description. It is not intended to be exhaustive or to limit the invention. Individual elements or features of a particular embodiment are generally not limited to that particular embodiment, but, where applicable, are interchangeable and can be used in a selected embodiment, even if not specifically shown or described. The same may also be varied in many ways. Such variations are not to be regarded as a departure from the invention, and all such modifications are intended to be included within the scope of the invention.
- Example embodiments are provided so that this disclosure will be thorough and will fully convey the scope to those who are skilled in the art. Numerous specific details are set forth such as examples of specific components, devices, and methods, to provide a thorough understanding of embodiments of the present disclosure. It will be apparent to those skilled in the art that specific details need not be employed, that example embodiments may be embodied in many different forms and that neither should be construed to limit the scope of the disclosure. In some example embodiments, well-known processes, well-known device structures, and well-known technologies are not described in detail.
Claims (7)
- A power tool (510) comprising:a housing (512);an output member (511) coupled to the housing (512), the output member (511) including an output shaft configured to rotate about a longitudinal axis (508);a switch (525) configured to select a desired rotational direction of the output shaft between a clockwise direction and a counterclockwise direction;a motor (526) contained in the housing (512) and drivably connected to the output shaft to impart rotary motion thereto;a rotational motion sensor (522) arranged in the housing (512) and operable to detect rotational motion of the housing (512) about a rotational axis that is substantially parallel to, or coaxial with, the longitudinal axis (508) of the output shaft; anda controller (530) arranged in the housing (512);wherein the controller (530) is configured to receive a first signal indicative of the desired rotational direction from the switch (525) and a second signal indicative of the rotational motion of the housing (512) from the rotational motion sensor (522), the controller (530) operable to determine a direction of the rotational motion of the housing (512) about the rotational axis and characterized in that the controller (530) is configured to drive the motor (526) only when the direction of rotational motion of the housing (512) is the same as the desired rotational direction.
- The power tool (510) of claim 1, wherein the output member (511) comprises a ratcheting mechanism configured to rotate the output shaft in a ratcheting manner in a direction that is the same as the desired rotational direction.
- The power tool (510) of claim 2, wherein the switch (525) is coupled to the ratcheting mechanism to enable switching the rotation of the output shaft between ratcheting in a clockwise direction and ratcheting in a counterclockwise direction.
- The power tool (510) of one of claims 1-3, wherein the controller (530) determines angular displacement of the housing (512) about the rotational axis in relation to a reference position and drives the motor (526) at a rotational speed that correlates to the angular displacement of the housing (512).
- The power tool (510) of claim 4, wherein the controller (530) resets the reference position to zero in response to an input command from an operator of the tool.
- The power tool (510) of one of claims 1-3, wherein the controller (530) drives the motor (526) at a maximum rotational speed when the angular displacement of the tool (510) exceeds a first threshold and drives the motor (526) at a designated rotational speed that is less than the maximum rotational speed when the angular displacement of the tool (510) is less than the first threshold but greater than a second threshold.
- The power tool (510) of one of claims 1-3, wherein the controller (530) is operable to drive the motor (526) to cause the output shaft to rotate in a clockwise motion about the longitudinal axis (508) when the rotational motion of the housing (512) about the rotational axis is clockwise, and to drive the motor (526) to cause the output shaft to rotate in a counterclockwise motion about the longitudinal axis (508) when the rotational motion of the housing (512) about the rotational axis is counterclockwise.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201261746606P | 2012-12-28 | 2012-12-28 | |
| US14/108,920 US9475180B2 (en) | 2010-01-07 | 2013-12-17 | Power tool having rotary input control |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP2749376A2 EP2749376A2 (en) | 2014-07-02 |
| EP2749376A3 EP2749376A3 (en) | 2018-04-18 |
| EP2749376B1 true EP2749376B1 (en) | 2020-11-04 |
Family
ID=49885015
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP13198640.8A Active EP2749376B1 (en) | 2012-12-28 | 2013-12-19 | Power tool having rotary input control |
Country Status (1)
| Country | Link |
|---|---|
| EP (1) | EP2749376B1 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWI755273B (en) * | 2021-02-08 | 2022-02-11 | 詹鎔穗 | Torque screwdriver structure |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102015205172A1 (en) * | 2015-03-23 | 2016-09-29 | Robert Bosch Gmbh | Machine tool, in particular hand tool, with a motor drive unit and with at least one sensor device |
| US10625405B2 (en) | 2016-09-13 | 2020-04-21 | Milwaukee Electric Tool Corporation | Powered ratcheting torque wrench |
| EP4046752A3 (en) * | 2020-12-07 | 2022-09-21 | Black & Decker Inc. | Power tool with multiple modes of operation and ergonomic handgrip |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3529498A (en) | 1969-02-05 | 1970-09-22 | Oren V Northcutt | Power wrench |
| US3621738A (en) | 1969-06-17 | 1971-11-23 | Oren V Northcutt | Powered ratchet wrench |
| US5016501B1 (en) | 1988-07-29 | 1997-07-15 | Sb Power Tool Co | Automatic shaft lock |
| US6490953B2 (en) | 2001-04-12 | 2002-12-10 | Mechanics Custom Tools Corp. | Externally captured ratchet head and housing assembly |
| JP4754395B2 (en) | 2006-04-20 | 2011-08-24 | 株式会社マキタ | Screwing machine |
| JP5242974B2 (en) * | 2007-08-24 | 2013-07-24 | 株式会社マキタ | Electric tool |
| US7793568B2 (en) | 2008-07-16 | 2010-09-14 | Nmtc, Inc. | Ratchet mechanism |
| US9193053B2 (en) | 2008-09-25 | 2015-11-24 | Black & Decker Inc. | Hybrid impact tool |
| US8800999B2 (en) | 2009-02-27 | 2014-08-12 | Black & Decker Inc. | Bit retention device |
| US8418778B2 (en) * | 2010-01-07 | 2013-04-16 | Black & Decker Inc. | Power screwdriver having rotary input control |
-
2013
- 2013-12-19 EP EP13198640.8A patent/EP2749376B1/en active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWI755273B (en) * | 2021-02-08 | 2022-02-11 | 詹鎔穗 | Torque screwdriver structure |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2749376A2 (en) | 2014-07-02 |
| EP2749376A3 (en) | 2018-04-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9475180B2 (en) | Power tool having rotary input control | |
| US10160049B2 (en) | Power tool having rotary input control | |
| US9321156B2 (en) | Power tool having rotary input control | |
| EP2631035B1 (en) | Power tool | |
| EP2521832B1 (en) | Power screwdriver having rotary input control | |
| US9415488B2 (en) | Screwdriving tool having a driving tool with a removable contact trip assembly | |
| EP2671681B1 (en) | Power tool having multiple operating modes | |
| US7557534B2 (en) | Power tool, battery, charger and method of operating the same | |
| EP2749376B1 (en) | Power tool having rotary input control | |
| US11701759B2 (en) | Electric power tool | |
| US20110127941A1 (en) | Power tool | |
| JP2006321043A (en) | Power tool, battery, battery charger, and operating method thereof | |
| US20190047133A1 (en) | Application-optimized deactivation behavior of an electronic slipping clutch | |
| EP4260984A1 (en) | Power tool with sheet metal fastener mode | |
| KR101957437B1 (en) | Electronic Tool having Hitting Function and Hitting Method of the Same |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 17P | Request for examination filed |
Effective date: 20131219 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: B25B 23/14 20060101ALI20180309BHEP Ipc: B25B 21/00 20060101AFI20180309BHEP |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| R17P | Request for examination filed (corrected) |
Effective date: 20181017 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20200703 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1330190 Country of ref document: AT Kind code of ref document: T Effective date: 20201115 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602013073762 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20201104 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 1330190 Country of ref document: AT Kind code of ref document: T Effective date: 20201104 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210304 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210204 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201104 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201104 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210205 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201104 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201104 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210204 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201104 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210304 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201104 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201104 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201104 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201104 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201104 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201104 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201104 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201104 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201104 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602013073762 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201104 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201104 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20201231 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20210805 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20201219 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201104 Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210104 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201104 Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201104 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20201219 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20201231 Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201104 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20201231 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210304 Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201104 Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201104 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201104 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201104 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20201231 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20231026 Year of fee payment: 11 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20231024 Year of fee payment: 11 |