EP2706931B1 - Dispositif de rupture de tissu - Google Patents
Dispositif de rupture de tissu Download PDFInfo
- Publication number
- EP2706931B1 EP2706931B1 EP12724408.5A EP12724408A EP2706931B1 EP 2706931 B1 EP2706931 B1 EP 2706931B1 EP 12724408 A EP12724408 A EP 12724408A EP 2706931 B1 EP2706931 B1 EP 2706931B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- tissue
- rotary
- disruptor
- conduit
- tissue disruptor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000006073 displacement reaction Methods 0.000 claims description 34
- 238000003780 insertion Methods 0.000 claims description 22
- 230000037431 insertion Effects 0.000 claims description 22
- 230000007246 mechanism Effects 0.000 claims description 21
- 230000000694 effects Effects 0.000 claims description 3
- 210000001519 tissue Anatomy 0.000 description 147
- 238000000034 method Methods 0.000 description 12
- 241001465754 Metazoa Species 0.000 description 3
- 210000000988 bone and bone Anatomy 0.000 description 3
- 206010028980 Neoplasm Diseases 0.000 description 2
- 230000004927 fusion Effects 0.000 description 2
- 238000000227 grinding Methods 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 210000004872 soft tissue Anatomy 0.000 description 2
- 238000004873 anchoring Methods 0.000 description 1
- 230000000740 bleeding effect Effects 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 239000007943 implant Substances 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 210000004705 lumbosacral region Anatomy 0.000 description 1
- 230000035515 penetration Effects 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
- 238000010298 pulverizing process Methods 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 239000000523 sample Substances 0.000 description 1
- 125000006850 spacer group Chemical group 0.000 description 1
- 238000010408 sweeping Methods 0.000 description 1
- 210000000115 thoracic cavity Anatomy 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images

















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/16—Bone cutting, breaking or removal means other than saws, e.g. Osteoclasts; Drills or chisels for bones; Trepans
- A61B17/1662—Bone cutting, breaking or removal means other than saws, e.g. Osteoclasts; Drills or chisels for bones; Trepans for particular parts of the body
- A61B17/1671—Bone cutting, breaking or removal means other than saws, e.g. Osteoclasts; Drills or chisels for bones; Trepans for particular parts of the body for the spine
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/16—Bone cutting, breaking or removal means other than saws, e.g. Osteoclasts; Drills or chisels for bones; Trepans
- A61B17/1613—Component parts
- A61B17/1631—Special drive shafts, e.g. flexible shafts
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320016—Endoscopic cutting instruments, e.g. arthroscopes, resectoscopes
- A61B17/32002—Endoscopic cutting instruments, e.g. arthroscopes, resectoscopes with continuously rotating, oscillating or reciprocating cutting instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00367—Details of actuation of instruments, e.g. relations between pushing buttons, or the like, and activation of the tool, working tip, or the like
- A61B2017/00398—Details of actuation of instruments, e.g. relations between pushing buttons, or the like, and activation of the tool, working tip, or the like using powered actuators, e.g. stepper motors, solenoids
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2926—Details of heads or jaws
- A61B2017/2927—Details of heads or jaws the angular position of the head being adjustable with respect to the shaft
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2926—Details of heads or jaws
- A61B2017/2932—Transmission of forces to jaw members
- A61B2017/2933—Transmission of forces to jaw members camming or guiding means
- A61B2017/2936—Pins in guiding slots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2926—Details of heads or jaws
- A61B2017/2932—Transmission of forces to jaw members
- A61B2017/2943—Toothed members, e.g. rack and pinion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320016—Endoscopic cutting instruments, e.g. arthroscopes, resectoscopes
- A61B17/32002—Endoscopic cutting instruments, e.g. arthroscopes, resectoscopes with continuously rotating, oscillating or reciprocating cutting instruments
- A61B2017/320032—Details of the rotating or oscillating shaft, e.g. using a flexible shaft
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/03—Automatic limiting or abutting means, e.g. for safety
- A61B2090/033—Abutting means, stops, e.g. abutting on tissue or skin
- A61B2090/034—Abutting means, stops, e.g. abutting on tissue or skin abutting on parts of the device itself
Definitions
- the present invention relates to one or more devices configured to cut, grind or otherwise disrupt soft or hard tissue in a human or animal body, typically to facilitate removal of the tissue.
- the present invention is a tissue disruption system as defined in the appended claims.
- a tissue disruption system comprising: a rigid conduit having an open proximal end, a distal opening and a direction of elongation, and; a tissue disruption device for deployment via said conduit, the tissue disruption device comprising: (a) a rotary tissue disruptor having an axis of rotation, said rotary tissue disruptor being configured for insertion along the rigid conduit with said axis of rotation parallel to the direction of elongation; (b) an elongated member deployable so as to extend through said conduit and linked so as to support said rotary tissue disruptor during insertion of said rotary tissue disruptor along said conduit; (c) an angular displacement mechanism associated with said rotary tissue disruptor and configured to selectively displace said rotary tissue disruptor such that said axis of rotation sweeps through a range of angular motion; and (d) a rotary drive linked to said rotary tissue disruptor so as to drive said rotary tissue disruptor in rotary motion while said rotary tissue disruptor is
- the angular displacement mechanism generates angular motion that is asymmetric relative to the direction of elongation of the conduit.
- the angular displacement mechanism includes a pivotal linkage at least partially defining a path of the angular motion.
- the angular displacement mechanism includes an elongated actuator deployable so as to extend along the conduit and linked to the rotary tissue disruptor such that relative displacement of the elongated actuator and the elongated member actuates the angular motion of the rotary tissue disruptor.
- the elongated actuator is a rotary drive shaft linking the rotary drive to the rotary tissue disruptor.
- the rotary drive comprises at least one miniature motor deployed in proximity to the rotary tissue disruptor for insertion along the conduit.
- the rotary drive comprises at least one miniature motor integrated with the rotary tissue disruptor so as to undergo angular motion together with the rotary tissue disruptor.
- the distal opening includes an open tip of the conduit.
- a distal tip of the conduit is closed, and wherein the distal opening is implemented as a lateral opening proximal to the distal tip.
- the rotary tissue disruptor comprises a rotating shaft located on the axis of rotation and a plurality of blades projecting radially from, and spaced along, the shaft.
- the plurality of blades include at least a first blade having a first radial length and at least a second blade having a second radial length smaller than the first radial length.
- a conduit having a given maximum internal dimension the plurality of blades span a dimension perpendicular to the axis of rotation greater than the given maximum internal dimension, at least a subset of the blades being formed with a predefined flexion region configured to allow flexing of a part of the blades for insertion along the conduit.
- At least one of the plurality of blades comprises: (a) a base portion mounted for rotation together with the rotating shaft; (b) a pivotal portion pivotally mounted relative to the base portion so as to be displaceable between a folded position folded towards the rotating shaft and a cutting position extended away from the rotating shaft; and (c) a biasing element deployed to bias the pivotal portion towards the folded position such that, during rotation of the rotating shaft, the blade opens under the effect of centripetal force to the cutting position and, when stopped, the blade is biased towards the folded position.
- the rotary tissue disruptor comprises a plurality of rotating segments flexibly interlinked so as to rotate together, and wherein the axis of rotation is the axis of rotation of a first of the segments.
- a distal segment of the rotary tissue disruptor is pivotally anchored to a support element such that the angular motion occurs as an arching motion of the plurality of segments.
- the tissue disruption system can be used in a method for disrupting target tissue in a human or animal body, the method comprising the steps of: (a) introducing a rigid conduit into the body, the conduit having an open proximal end and a distal opening, the conduit being fixed in a position with the distal opening adjacent to the target tissue; (b) introducing through the rigid conduit the aforementioned tissue disruption device so that at least part of the rotary tissue disruptor projects from the distal opening; and (c) actuating both the rotary drive and the angular displacement mechanism so that the rotary tissue disruptor rotates at a plurality of positions within the range of angular motion, thereby disrupting the target tissue.
- the target tissue includes at least part of an intervertebral disc.
- the target tissue is soft tissue.
- the target tissue is bone.
- the target tissue is hard tissue.
- the target tissue is a tumor.
- At least part of the target tissue is removed by application of suction via the rigid conduit.
- At least part of the target tissue is removed through removal of the rotary tissue disruptor with a quantity of the target tissue lodged therein.
- the present invention is a tissue disruption device.
- a preferred embodiment is particularly configured for cutting and grinding intervertebral disc material during discectomy or fusion procedures in the cervical, thoracic and lumbar spine
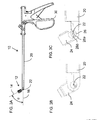
- tissue disruption device for deployment via a rigid conduit 100 ( FIGS. 6A and 6B ) having an open proximal end 102 and a distal opening 104.
- distal opening in this context denotes an opening which is either at the tip of the conduit, or in the case of a lateral opening, which is sufficiently near the distal end of the conduit to provide allow tissue disruption device 10 to disrupt tissue adjacent to the distal end of the conduit.
- tissue disruption device 10 includes a rotary tissue disruptor 12 having an axis of rotation 14.
- Rotary tissue disruptor 12 is configured for insertion along the rigid conduit with its axis of rotation 14 parallel to an insertion direction 16, corresponding to the direction of elongation of the conduit.
- An angular displacement mechanism is configured to selectively displace rotary tissue disruptor 12 such that axis of rotation 14 sweeps through a range of angular motion ⁇ ( FIG. 3A ).
- a rotary drive is linked to rotary tissue disruptor 12 so as to drive the rotary tissue disruptor in rotary motion about axis 14 while the rotary tissue disruptor is at a range of angular position within the range of angular motion.
- the angular displacement mechanism preferably generates angular motion of rotary tissue disruptor 12 within a plane that includes insertion direction 16, and preferably in a motion that is asymmetric relative to insertion direction 16.
- the range of motion is from the straight insertion state in which axis of rotation 14 is parallel to the insertion direction 16 and a deflected state in which axis 14 is inclined by angle ⁇ relative to the insertion direction 16.
- the range of deflection ⁇ is at least 30 degrees, and in some cases at least 45 degrees.
- the positioning and orientation of rotary tissue disruptor 12 is preferably delineated by the conduit position such that careful alignment of the conduit is sufficient to ensure that target outside the region of target tissue cannot be accidentally damaged by operation of the rotary tissue disruptor.
- the nature of the angular motion together with the distal and proximal ends of the opening inherently delimit the region of operation of the tissue disruptor 12.
- the tissue disruption device 10 and conduit 100 preferably include complementary abutment features (not shown) which define a fully inserted position, thereby preventing incursion of the rotary tissue disruptor 12 beyond the target tissue at a given depth beyond the conduit tip.
- rotary tissue disruptor 12 is preferably supported by an elongated member 20 deployable so as to extend through the conduit.
- Either rotary tissue disruptor 12 or elongated member 20 mechanically interacts with conduit 100 such that linear displacement of the rotary tissue disruptor parallel to the direction of elongation is limited to a predefined range of displacement during the angular motion.
- linear displacement of rotary tissue disruptor 12 parallel to the direction of insertion is substantially prevented during the angular motion.
- the tip of tissue disruptor 12 terminates in a rounded non-cutting tip 18.
- angular displacement mechanism configured to selectively displace rotary tissue disruptor 12 such that axis of rotation 14 sweeps through a range of angular motion ⁇ .
- the phrase "sweep through” is used in this context to refer to the motion caused by pivoting about a location near or beyond one end of the tool, or any other motion in which the tool's axis of rotation over most or all of the length of the rotating body advances in the same general direction, even if with variable magnitude, so as to sweep out an area in which the tissue is to be disrupted.
- the angular displacement mechanism includes a pivotal linkage at least partially defining a path of the angular motion.
- the pivotal linkage may be implemented as a pivot pin sliding in a slot, a hinge, or any other mechanical engagement which defines a pivotal engagement.
- FIGS. 1A-7C illustrate an implementation in which rotary tissue disruptor 12 is mounted to elongated member 20 at a fixed hinge 22 which supports a base block 24 of the disruptor.
- the angular displacement mechanism preferably uses a positive displacement mechanism, meaning that motion of an actuating member forces a corresponding motion of tissue disruptor 12, in contrast to relying upon resilient biasing.
- the angular displacement mechanism employs a rigid linkage to actuate the displacement.
- tissue disrupting device 10 here includes an elongated actuator 26 extend along alongside, or in this case within, elongated member 20, and linked to tissue disruptor 12 such that relative displacement of elongated actuator 26 and elongated member 20 actuates the angular motion of rotary tissue disruptor 12.
- actuator 26 is located on the side of hinge 22 away from the direction of deflection such that advancing of actuator 26 distally causes increased deflection of axis of rotation 14 from direction of insertion 16 while retraction in a proximal direction returns disruptor 12 towards its straightened state.
- 3C shows the use of toothed engagement to allow transfer of significant torque to the angular displacement of disruptor 12, with teeth 28 a near the end of actuator 26 engaged in corresponding teeth/recesses 28 b formed as part of base block 24.
- a manually operated handle grip 30 is linked so as to advance actuator 26 when squeezed and to retract actuator 26 when released.
- FIGS. 14A-14B and 15A-15B these illustrate alternative non-limiting examples of angular deflection mechanisms according to the present invention.
- a pin 32 projecting from each side of base block 24 is engaged in an arcuate slot 34 formed in elongated member 20.
- Arcuate slot 34 is configured such that, when block 24 is advanced relative to elongated member 20, pin 32 rides along slot 34 to generate deflection as illustrated in FIG. 14B .
- Advancing of base block 24 may be achieved either by a dedicated actuator element as described above or by applying longitudinal force to a torsion drive shaft passing along the elongated body.
- FIGS. 15A and 15B illustrate a case where a pivot hinge 22 is at one side of base block 24, such that rearward displacement of the torsion drive shaft causes angular displacement of rotary tissue disruptor 12.
- the cut-away view of FIG. 15A shows the torsion drive train, here including a rotary drive shaft 36 with a universal joint 38.
- rotary tissue disruptor 12 this is linked to rotary tissue disruptor 12 so as to drive the rotary tissue disruptor in rotary motion about axis 14 while the rotary tissue disruptor is at a range of angular position within the range of angular motion.
- one or more motor is used to provide the motive force to drive tissue disruptor 12.
- the motor may be electric, hydraulic or pneumatically driven, with the electric option typically preferred for reasons of convenience of implementation.
- Manually actuated rotary drive arrangements for example, with a manually rotated power input handle, also fall within the scope of the present invention.
- the rotary drive is located in the proximal portion of the device, outside the body, as exemplified by motor 40 and step-down gear 42 in FIGS. 6A and 6B .
- the output power it transferred along elongated member 20 by a rotary drive shaft 36, which must be configured to transfer rotary power to tissue disruptor 12 while accommodating the angular motion of the disruptor.
- this is achieved by using a drive shaft 36 with an integrated flexion region 44 formed by a series of orthogonally cut slots.
- An alternative to this approach is the use of one or more flexible linkage, such as the aforementioned universal joint 38 illustrated in FIG. 15A .
- alternative implementations of the present invention employ one or more miniature motor deployed in proximity to rotary tissue disruptor 12, i.e., near the distal end of the device 10, so that the motor is itself inserted along conduit 100 into the body.
- the miniature motor(s) are integrated within base block 24 or at any other location beyond the point of pivoting, thereby avoiding the need for a flexible linkage.
- the required electrical supply can readily be provided along the length of the elongated member 20 by use of flexible wires which accommodate the required motion.
- Suitable miniature motors are commercially available from a number of sources, such as the product line "DC-Micromotors” available from Dr. Fritz Faulhaber GmbH (Germany), and rotary SQUIGGLETM motors available from NewScale Technologies of Victor, NY (USA).
- DC-Micromotors available from Dr. Fritz Faulhaber GmbH (Germany)
- rotary SQUIGGLETM motors available from NewScale Technologies of Victor, NY (USA).
- the required motor specifications can readily be chosen by one ordinarily skilled in the art according to the power, speed and maximum torque required for each given application.
- a plurality of miniature motors may be connected in series to increase the total output power of the assembly.
- rotary tissue disruptor 12 may be any type of rotating tool for disrupting tissue of any type.
- the term "disrupting” as used herein refers generically to any process which changes the state or properties of tissue by direct application of mechanical energy, including but not limited to, cutting, scoring, severing, slicing, lacerating, grinding and pulverizing.
- the tissue disruption may be performed on healthy or diseased tissue, whether hard tissue or soft tissue.
- bladedes or “cutting elements”
- cutting elements which directly perform the tissue disruption will be referred to herein as “blades” or “cutting elements”, but depending upon the type of tissue and the type of disruption desired, these cutting elements may not be sharped, and may in some cases be implemented as flexible or brush-like elements.
- Various non-limiting exemplary "cutting elements” will be illustrated herein. A suitable selection of cutting elements suitable for each particular application will readily be made by a person ordinarily skilled in the art on the basis of the examples described together with an understanding of each particular intended application.
- rotary tissue disruptor 12 is formed with a rotating shaft 46 located on axis of rotation 14 and a plurality of blades 48 projecting radially from, and spaced along, shaft 46. Examples of this type are illustrated herein in FIGS. 1A-15B .
- Blades 48 may have many different forms. Two non-limiting but preferred examples are illustrated in FIGS. 8A-8C and FIGS. 10-10C , respectively. In both cases, blades 48 have a shaped central opening 50 for non-rotatable mounting on shaft 46 and two diametrically opposed cutting portions 52. Although shown here with two cutting portions per blade, a single cutting portion per blade, or 3 or more cutting portions per blade, may also be used.
- FIGS. 8D and 8E show a partially assembled tissue disruptor 12 formed from a number of the blades of FIGS. 8A-8C with interposed spacers 54. In this example, all of the blades are of equal dimensions and are equally spaced.
- FIG. 11A illustrates a partially assembled tissue disruptor 12 which has different radial lengths of blades in different regions.
- the term "radial length” is used herein to refer to the maximum distance reached by any part of a blade from the axis of rotation.
- an intermediate region 56 along a length of rotating shaft 46 has blades of a first radial length and regions 58 distal and proximal to the intermediate region have blades of a second radial length smaller than the first radial length. This configuration is particularly useful in certain applications, such as for example during a spinal fusion or disc replacement procedure.
- variable length profile is effective to break up intervertebral disc material as part of a discectomy procedure and at the same time penetrates more deeply in a central region, helping to bare "bleeding bone” for effective anchoring and integration of an implant.
- FIGS. 7A-7C illustrate the extent of coverage achieved using such a profile in an axial plane during discectomy.
- FIGS. 12A-12C illustrate a set of uniform-length blades in three different sizes, which may be used sequentially to perform gradually increased tissue disruption.
- tissue distraction device 10 is preferably constructed to allow quick release and interchange of tissue disruptors 12 during a procedure. Quick release mechanisms of various types are known in the art, and will not be described here in detail.
- FIGS. 13A-13D illustrate further variant implementations of varying radial length and spacing of blades 48. Variations in the lengths and density of the cutting elements can be used to vary the type of tissue disruption performed, the texture of the adjacent tissue at the border of the disrupted tissue, and the quantity of disrupted tissue which tends to be lodged between the blades and removed together with the device after use.
- blades 48 as illustrated here have predefined flexion regions 60 which allow parts of the blades to flex. This feature is particularly valuable in cases where blades 48 span a dimension perpendicular to axis of rotation 14 greater than a given maximum internal dimension of the conduit through which they are introduced. As shown in FIGS. 9A and 9B , flexibility of the blades allows them to flex for insertion along conduit 100 and then to return to their intended dimensions on leaving the conduit, ready for use.
- FIGS. 16A-21 A range of other possible implementations of tissue disruptors 12 are illustrated in FIGS. 16A-21 , and are mostly self-explanatory.
- the examples include various configurations of cutting wires or strips ( FIGS. 16A, 16E and 17A-18B ) and various other rigid cutter forms ( FIGS. 16B-16D and 21 ) and a brush-like form ( FIG. 20 ).
- the cutters each have a low-profile form for insertion through the conduit and a larger-diameter open cutting form. Generally, the transition between these forms may occur either elastically, simply by being squeezed into the conduit, or may be actuated by a suitable actuator element (not shown).
- the cutter is formed with a base portion 62 mounted for rotation together with rotating shaft 46 and one or more pivotal portion 64 pivotally mounted relative to the base portion so as to be displaceable between a folded position ( FIG. 19A ) folded towards the rotating shaft and a cutting position ( FIG. 19B ) extended away from the rotating shaft.
- a biasing element (not shown) is deployed to bias the pivotal portion towards the folded position such that, during rotation of the rotating shaft, the blade opens under the effect of centripetal force to the cutting position and, when stopped, the blade is biased towards the folded position.
- a rotary tissue disruptor which has a single rigid rotating shaft 46
- various implementations of the present invention may use a rotary tissue disruptor which has either a segmented or flexible rotary shaft.
- the aforementioned axis of rotation 14 is taken to be the axis of rotation at the proximal end of the tissue disruptor structure.
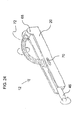
- FIGS. 22A-24 illustrate a tissue disruptor 12 in which rotating shaft 46 is subdivided into three segments 46 a -46 c interconnected by flexible drive linkages 66.
- the end of distal segment 46 c is pivotally anchored at a hinge 68 while being still free to rotate about its longitudinal axis.
- the proximal end of proximal segment 46 a is pivotally anchored by a pin-in-slot arrangement 70 while being free to rotate about its longitudinal axis.
- pin-in-slot arrangement 70 allows the tissue disruptor to transform from the state of FIG. 22A to that of FIG. 22B , performing an arching motion of the segments, and sweeping through a D-shaped volume of tissue. It will be noted that the proximal segment 46 a performs a motion fully analogous to that described above with reference to the earlier embodiments, and answers to the same geometric definitions used there.
- rotary drive shaft 36 is retracted, the device returns to the configuration of FIG. 22A .
- segments 46 a -46 c are preferably provided with a plurality of radially projecting and axially spaced blades 48, such as those illustrated in FIGS. 22C and 22D .
- FIGS. 23A-23C illustrate a further embodiment similar to that of FIGS. 22A-22D except that the segments here are all mounted on a common flexible shaft 72.
- flexible shaft 72 itself becomes the direct support for the various blades (not shown) or other structures for disrupting tissue.
- the tangential direction at the proximal end of flexible shaft 72 is taken to be the "axis of rotation" of the tissue disruptor for the purpose of the geometrical definition of the present invention.
- rigid conduit 100 is first introduced into the body and fixed in a position with the distal opening adjacent to the target tissue.
- Tissue disruptor 12 is then introduced through the rigid conduit so that at least part of the rotary tissue disruptor projects from the distal opening.
- Both the rotary drive and the angular displacement mechanism are then actuated so that the rotary tissue disruptor rotates at a plurality of positions within the range of angular motion, thereby disrupting the target tissue. Most preferably, rotation of the tissue disruptor occurs continuously during the angular motion.
- the technique of the present invention may be used to advantage on soft target tissue, and in particular, at least part of an intervertebral disc, as well as hard target tissue, and in particular, bone. It may also be advantageously used to disrupt a tumor.
- At least part of the target tissue may be removed, during or after the tissue disruption process, either by application of suction via the rigid conduit or by removal of at least part of the target tissue through removal of the rotary tissue disruptor with a quantity of the target tissue lodged therein.
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- Public Health (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Orthopedic Medicine & Surgery (AREA)
- General Health & Medical Sciences (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Veterinary Medicine (AREA)
- Dentistry (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Surgical Instruments (AREA)
- Prostheses (AREA)
- Preparation Of Compounds By Using Micro-Organisms (AREA)
- Micro-Organisms Or Cultivation Processes Thereof (AREA)
Claims (15)
- Système de rupture des tissus, comprenant :un conduit rigide (100), comportant une extrémité proximale ouverte (102), une ouverture distale (104) et une direction d'allongement, et :un dispositif de rupture des tissus (10), destiné à être déployé à travers ledit conduit, le dispositif de rupture des tissus comprenant :(a) un moyen de rupture rotatif des tissus (12), comportant un axe de rotation (14), -ledit moyen de rupture rotatif des tissus étant destiné à être inséré le long du conduit rigide, ledit axe de rotation étant parallèle à la direction d'allongement :(b) un élément allongé (2), pouvant être déployé, de sorte à s'étendre à travers ledit conduit, et étant relié de sorte à supporter ledit moyen de rupture rotatif des tissus (12) au cours de l'insertion dudit moyen de rupture rotatif des tissus le long dudit conduit (100) ;(c) un mécanisme à déplacement angulaire (22, 32, 34, 38, 44), associé audit moyen de rupture rotatif des tissus et destiné à déplacer sélectivement ledit moyen de rupture rotatif des tissus, de sorte que ledit axe de rotation balaie une plage de déplacement angulaire ; et(d) un moyen d'entraînement rotatif (40), relié audit moyen de rupture rotatif des tissus (12), de sorte à entraîner ledit moyen de rupture rotatif des tissus en un déplacement rotatif pendant que ledit moyen de rupture rotatif des tissus se trouve au niveau d'une plage de positions angulaires à l'intérieur de ladite plage de déplacement angulaire ; caractérisé en ce queledit dispositif de rupture des tissus (12) coopère de manière mécanique avec ledit conduit (100), de sorte qu'un déplacement linéaire dudit moyen de rupture rotatif des tissus parallèle à ladite direction d'allongement est empêché ou limité à une plage de déplacement prédéfinie au cours dudit déplacement angulaire.
- Système de rupture des tissus selon la revendication 1, dans lequel ledit mécanisme de déplacement angulaire entraîne un déplacement angulaire asymétrique par rapport à la direction d'allongement du conduit (100).
- Système de rupture de tissus selon la revendication 1, dans lequel ledit mécanisme de déplacement angulaire englobe une liaison pivotante (22, 32, 70), définissant au moins en partie un trajet dudit déplacement angulaire.
- Système de rupture de tissus selon la revendication 1, dans lequel ledit mécanisme de déplacement angulaire englobe un actionneur allongé (26, 36) pouvant être déployé de sorte à s'étendre le long dudit conduit (100), et étant relié audit moyen de rupture rotatif des tissus (12), de sorte qu'un déplacement relatif dudit actionneur allongé et dudit élément allongé entraîne ledit déplacement angulaire dudit moyen de rupture rotatif des tissus.
- Système de rupture de tissus selon la revendication 4, dans lequel ledit actionneur allongé est un arbre d'entraînement rotatif (36), reliant ledit moyen d'entrainement rotatif audit moyen de rupture rotatif des tissus.
- Système de rupture de tissus selon la revendication 1, dans lequel ledit moyen d'entraînement rotatif comprend au moins un moteur miniature déployé à proximité dudit moyen de rupture rotatif des tissus (12), en vue d'une insertion le long du conduit (100).
- Système de rupture de tissus selon la revendication 1, dans lequel ledit moyen d'entraînement rotatif comprend au moins un moteur miniature intégré dans ledit moyen de rupture rotatif des tissus (12), de sorte à effectuer un déplacement angulaire ensemble avec ledit moyen de rupture rotatif des tissus.
- Système de rupture de tissus selon la revendication 1, dans lequel ladite ouverture distale (104) englobe une pointe ouverte dudit conduit.
- Système de rupture de tissus selon la revendication 1, dans lequel une pointe distale dudit conduit est fermée, ladite ouverture distale (104) ayant la forme d'une ouverture latérale proximale à ladite pointe distale.
- Système de rupture de tissus selon la revendication 1, dans lequel ledit moyen de rupture rotatif des tissus comprend un arbre rotatif (46), agencé sur ledit axe de rotation, et plusieurs lames (48) débordant radialement de celui-ci est espacées le long dudit arbre.
- Système de rupture de tissus selon la revendication 10, dans lequel lesdites plusieurs lames (48) englobent au moins une première lame (56) ayant une première longueur radiale, et au moins une deuxième lame (58) ayant une deuxième longueur radiale, inférieure à ladite première longueur radiale.
- Système de rupture de tissus selon la revendication 10, dans lequel ledit conduit a une dimension intérieure maximale définie, lesdites plusieurs lames couvrant une dimension perpendiculaire audit axe de rotation, supérieure à ladite dimension intérieure maximale définie, au moins un sous-groupe desdites lames (48) comportant une région de flexion prédéfinie (60) destinée à permettre le fléchissement d'une partie desdites lames en vue d'une insertion le long dudit conduit (100).
- Système de rupture de tissus selon la revendication 10, dans lequel au moins une desdites plusieurs lames (48) comprend :(a) une partie de base (62), montée en vue d'une rotation commune avec ledit arbre rotatif ;(b) une partie pivotante (64), montée de manière pivotante par rapport à ladite partie de base, de sorte à pouvoir être déplacée entre une position repliée, repliée vers ledit arbre rotatif, et une position de coupe s'étendant à l'écart dudit arbre rotatif ; et(c) un élément poussoir, déployé pour pousser ladite partie pivotante vers ladite position repliée, de sorte qu'au cours de la rotation dudit arbre rotatif, ladite lame s'ouvre sous l'influence de la force centripète dans à ladite position de coupe, et ; ladite lame étant poussée vers ladite position repliée lors d'un arrêt.
- Système de rupture de tissus selon la revendication 1, dans lequel ledit moyen de rupture rotatif des tissus comprend plusieurs segments rotatifs (46a, 46b, 46c), reliés mutuellement de manières flexible, de sorte à tourner ensemble, et dans lequel ledit axe de rotation est l'axe de rotation d'un premier desdits segments (46a).
- Système de rupture de tissus selon la revendication 14, dans lequel un segment distal (46c) dudit moyen de rupture rotatif des tissus (12) est ancré de manière pivotante (68) sur un élément de support, de sorte que ledit déplacement angulaire se fait sous forme d'un déplacement arqué desdits plusieurs segments.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201161485140P | 2011-05-12 | 2011-05-12 | |
| PCT/IB2012/052406 WO2012153319A1 (fr) | 2011-05-12 | 2012-05-14 | Dispositif de rupture de tissu et procédés correspondants |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2706931A1 EP2706931A1 (fr) | 2014-03-19 |
| EP2706931B1 true EP2706931B1 (fr) | 2015-04-15 |
Family
ID=46178596
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP12724408.5A Active EP2706931B1 (fr) | 2011-05-12 | 2012-05-14 | Dispositif de rupture de tissu |
Country Status (10)
| Country | Link |
|---|---|
| US (3) | US8845638B2 (fr) |
| EP (1) | EP2706931B1 (fr) |
| JP (1) | JP2014519874A (fr) |
| CN (2) | CN103648415A (fr) |
| AU (1) | AU2012254824A1 (fr) |
| BR (1) | BR112013029079A2 (fr) |
| CA (1) | CA2835061A1 (fr) |
| IL (2) | IL229546A0 (fr) |
| RU (1) | RU2013150021A (fr) |
| WO (1) | WO2012153319A1 (fr) |
Families Citing this family (69)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6793678B2 (en) | 2002-06-27 | 2004-09-21 | Depuy Acromed, Inc. | Prosthetic intervertebral motion disc having dampening |
| WO2004073563A2 (fr) | 2003-02-14 | 2004-09-02 | Depuy Spine, Inc. | Dispositif et procede de fusion intervertebrale forme in-situ |
| US20040267367A1 (en) | 2003-06-30 | 2004-12-30 | Depuy Acromed, Inc | Intervertebral implant with conformable endplate |
| US20070162132A1 (en) | 2005-12-23 | 2007-07-12 | Dominique Messerli | Flexible elongated chain implant and method of supporting body tissue with same |
| US8034110B2 (en) | 2006-07-31 | 2011-10-11 | Depuy Spine, Inc. | Spinal fusion implant |
| WO2008070863A2 (fr) | 2006-12-07 | 2008-06-12 | Interventional Spine, Inc. | Implant intervertébral |
| US9039768B2 (en) | 2006-12-22 | 2015-05-26 | Medos International Sarl | Composite vertebral spacers and instrument |
| US8900307B2 (en) | 2007-06-26 | 2014-12-02 | DePuy Synthes Products, LLC | Highly lordosed fusion cage |
| US20090088789A1 (en) | 2007-09-28 | 2009-04-02 | O'neil Michael J | Balloon With Shape Control For Spinal Procedures |
| EP2237748B1 (fr) | 2008-01-17 | 2012-09-05 | Synthes GmbH | Implant intervertébral extensible |
| US20090248092A1 (en) | 2008-03-26 | 2009-10-01 | Jonathan Bellas | Posterior Intervertebral Disc Inserter and Expansion Techniques |
| WO2009124269A1 (fr) | 2008-04-05 | 2009-10-08 | Synthes Usa, Llc | Implant intervertébral extensible |
| US9526620B2 (en) | 2009-03-30 | 2016-12-27 | DePuy Synthes Products, Inc. | Zero profile spinal fusion cage |
| US9168138B2 (en) | 2009-12-09 | 2015-10-27 | DePuy Synthes Products, Inc. | Aspirating implants and method of bony regeneration |
| US9393129B2 (en) | 2009-12-10 | 2016-07-19 | DePuy Synthes Products, Inc. | Bellows-like expandable interbody fusion cage |
| US8979860B2 (en) | 2010-06-24 | 2015-03-17 | DePuy Synthes Products. LLC | Enhanced cage insertion device |
| US9907560B2 (en) | 2010-06-24 | 2018-03-06 | DePuy Synthes Products, Inc. | Flexible vertebral body shavers |
| US8623091B2 (en) | 2010-06-29 | 2014-01-07 | DePuy Synthes Products, LLC | Distractible intervertebral implant |
| CN103221001A (zh) * | 2010-07-15 | 2013-07-24 | Nlt脊椎有限公司 | 植入可弯折植体的手术系统及方法 |
| US11529241B2 (en) | 2010-09-23 | 2022-12-20 | DePuy Synthes Products, Inc. | Fusion cage with in-line single piece fixation |
| US20120078373A1 (en) | 2010-09-23 | 2012-03-29 | Thomas Gamache | Stand alone intervertebral fusion device |
| US20120078372A1 (en) | 2010-09-23 | 2012-03-29 | Thomas Gamache | Novel implant inserter having a laterally-extending dovetail engagement feature |
| US9402732B2 (en) | 2010-10-11 | 2016-08-02 | DePuy Synthes Products, Inc. | Expandable interspinous process spacer implant |
| US9421112B2 (en) * | 2011-07-14 | 2016-08-23 | Tria Spine Meikal Ltd. Sti. | Fixation system for spinal cages |
| US9271836B2 (en) | 2012-03-06 | 2016-03-01 | DePuy Synthes Products, Inc. | Nubbed plate |
| EP3597126A1 (fr) | 2012-04-28 | 2020-01-22 | Physcient, Inc. | Dispositifs de dissection des tissus mous |
| US9592069B2 (en) | 2012-04-28 | 2017-03-14 | Physcient, Inc. | Methods and devices for soft tissue dissection |
| WO2013179102A1 (fr) | 2012-05-29 | 2013-12-05 | NLT-Spine Ltd. | Implant capable de déflexion latérale |
| US10182921B2 (en) | 2012-11-09 | 2019-01-22 | DePuy Synthes Products, Inc. | Interbody device with opening to allow packing graft and other biologics |
| US20160270930A1 (en) | 2012-12-04 | 2016-09-22 | Nlt Spine Ltd. | System and method for deploying implant |
| US9717601B2 (en) | 2013-02-28 | 2017-08-01 | DePuy Synthes Products, Inc. | Expandable intervertebral implant, system, kit and method |
| US9522070B2 (en) | 2013-03-07 | 2016-12-20 | Interventional Spine, Inc. | Intervertebral implant |
| US9480574B2 (en) | 2013-03-14 | 2016-11-01 | Benvenue Medical, Inc. | Spinal fusion implants and devices and methods for deploying such implants |
| WO2015035268A1 (fr) * | 2013-09-06 | 2015-03-12 | Thomas Jefferson University | Craniotome à épaulements obliques et système minimal de fixation de plaque permettant une cosmèse et une intégrité structurale améliorées des craniotomies |
| USD753826S1 (en) * | 2013-11-20 | 2016-04-12 | Karl Storz Gmbh & Co. Kg | Bipolar cutting instrument |
| JP6227159B2 (ja) * | 2013-11-29 | 2017-11-08 | チョンチン シーシャン サイエンス アンド テクノロジー カンパニー, リミテッドChongqing Xishan Science & Technology Co., Ltd. | 連続可変角度部を含む側方研削ドリル |
| WO2015161249A1 (fr) | 2014-04-18 | 2015-10-22 | Physcient, Inc. | Méthodes et dispositifs pour dissection de tissu mou |
| US10383651B2 (en) | 2014-04-22 | 2019-08-20 | Physcient, Inc. | Instruments, devices, and related methods for soft tissue dissection |
| US10045803B2 (en) | 2014-07-03 | 2018-08-14 | Mayo Foundation For Medical Education And Research | Sacroiliac joint fusion screw and method |
| US10314605B2 (en) | 2014-07-08 | 2019-06-11 | Benvenue Medical, Inc. | Apparatus and methods for disrupting intervertebral disc tissue |
| US20160045207A1 (en) * | 2014-08-14 | 2016-02-18 | Biomet Manufacturing, Llc | Flexible bone reamer |
| US9833332B2 (en) * | 2014-10-27 | 2017-12-05 | Seth L Neubardt | Harvesting bone graft material for use in spinal and other bone fusion surgeries |
| US10022243B2 (en) | 2015-02-06 | 2018-07-17 | Benvenue Medical, Inc. | Graft material injector system and method |
| US11426290B2 (en) | 2015-03-06 | 2022-08-30 | DePuy Synthes Products, Inc. | Expandable intervertebral implant, system, kit and method |
| US9833321B2 (en) | 2016-04-25 | 2017-12-05 | Imds Llc | Joint fusion instrumentation and methods |
| US10413332B2 (en) | 2016-04-25 | 2019-09-17 | Imds Llc | Joint fusion implant and methods |
| JP7023877B2 (ja) | 2016-06-28 | 2022-02-22 | イーアイティー・エマージング・インプラント・テクノロジーズ・ゲーエムベーハー | 拡張可能かつ角度調節可能な関節運動式の椎間ケージ |
| CN109688981A (zh) | 2016-06-28 | 2019-04-26 | Eit 新兴移植技术股份有限公司 | 可扩张的、角度可调整的椎间笼 |
| US10888433B2 (en) | 2016-12-14 | 2021-01-12 | DePuy Synthes Products, Inc. | Intervertebral implant inserter and related methods |
| US10758286B2 (en) | 2017-03-22 | 2020-09-01 | Benvenue Medical, Inc. | Minimal impact access system to disc space |
| US10398563B2 (en) | 2017-05-08 | 2019-09-03 | Medos International Sarl | Expandable cage |
| US11344424B2 (en) | 2017-06-14 | 2022-05-31 | Medos International Sarl | Expandable intervertebral implant and related methods |
| US10940016B2 (en) | 2017-07-05 | 2021-03-09 | Medos International Sarl | Expandable intervertebral fusion cage |
| US10695073B2 (en) | 2017-08-22 | 2020-06-30 | Arthrex, Inc. | Control system for retrograde drill medical device |
| WO2019143970A2 (fr) * | 2018-01-22 | 2019-07-25 | Chauvet & Sons, Llc | Système, appareil et procédé de transmission sans fil de données de commande |
| US11583327B2 (en) | 2018-01-29 | 2023-02-21 | Spinal Elements, Inc. | Minimally invasive interbody fusion |
| WO2019178575A1 (fr) * | 2018-03-16 | 2019-09-19 | Benvenue Medical, Inc. | Instrumentation articulée et et ses procédés d'utilisation |
| US11006967B2 (en) * | 2018-08-09 | 2021-05-18 | Wright Medical Technology, Inc. | Cartilage removal tool and method |
| US11446156B2 (en) | 2018-10-25 | 2022-09-20 | Medos International Sarl | Expandable intervertebral implant, inserter instrument, and related methods |
| US11426286B2 (en) | 2020-03-06 | 2022-08-30 | Eit Emerging Implant Technologies Gmbh | Expandable intervertebral implant |
| US20210298783A1 (en) * | 2020-03-26 | 2021-09-30 | Integrity Implants Inc. | Controllably translatable tissue cutting devices |
| CN111570036A (zh) * | 2020-06-04 | 2020-08-25 | 湖北省银丰鼎诚生物工程有限公司 | 可拆卸手持破碎机 |
| US12096946B2 (en) * | 2021-01-28 | 2024-09-24 | Globus Medical, Inc. | Vertebral disc cutter and method |
| US11850160B2 (en) | 2021-03-26 | 2023-12-26 | Medos International Sarl | Expandable lordotic intervertebral fusion cage |
| US11752009B2 (en) | 2021-04-06 | 2023-09-12 | Medos International Sarl | Expandable intervertebral fusion cage |
| US12035922B2 (en) * | 2021-04-27 | 2024-07-16 | Globus Medical, Inc. | Bi-directional disk removal and decortication tool |
| AU2021479236A1 (en) * | 2021-12-17 | 2024-06-27 | Joint Preservation Innovations, LLC | Articulating rotary cutting tool |
| US12090064B2 (en) | 2022-03-01 | 2024-09-17 | Medos International Sarl | Stabilization members for expandable intervertebral implants, and related systems and methods |
| WO2024110681A1 (fr) | 2022-11-23 | 2024-05-30 | Abanza Tecnomed, S.L. | Instrument de rupture et système de rupture comprenant un élément de rupture articulé de manière bilatérale |
Family Cites Families (43)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7452359B1 (en) | 1988-06-13 | 2008-11-18 | Warsaw Orthopedic, Inc. | Apparatus for inserting spinal implants |
| US5484437A (en) | 1988-06-13 | 1996-01-16 | Michelson; Gary K. | Apparatus and method of inserting spinal implants |
| US5285795A (en) | 1991-09-12 | 1994-02-15 | Surgical Dynamics, Inc. | Percutaneous discectomy system having a bendable discectomy probe and a steerable cannula |
| ATE282366T1 (de) | 1993-06-10 | 2004-12-15 | Karlin Technology Inc | Wirbeldistraktor |
| US6159214A (en) | 1996-07-31 | 2000-12-12 | Michelson; Gary K. | Milling instrumentation and method for preparing a space between adjacent vertebral bodies |
| US7331963B2 (en) | 1997-10-06 | 2008-02-19 | Warsaw Orthopedic, Inc. | Drill head for use in placing an intervertebral disc device |
| US6083228A (en) | 1998-06-09 | 2000-07-04 | Michelson; Gary K. | Device and method for preparing a space between adjacent vertebrae to receive an insert |
| US20030191474A1 (en) | 2000-02-16 | 2003-10-09 | Cragg Andrew H. | Apparatus for performing a discectomy through a trans-sacral axial bore within the vertebrae of the spine |
| US7500977B2 (en) | 2003-10-23 | 2009-03-10 | Trans1 Inc. | Method and apparatus for manipulating material in the spine |
| US8100823B2 (en) | 2002-09-27 | 2012-01-24 | Surgitech, Llc | Surgical file system with a visualization instrument |
| AU2003283978C1 (en) | 2002-09-27 | 2010-01-21 | Surgitech, Llc | Shielded reciprocating surgical file |
| CA2519004A1 (fr) | 2003-03-13 | 2004-09-23 | Sdgi Holdings, Inc. | Trousse d'outils pour la preparation de plateaux vertebraux |
| US20040215222A1 (en) * | 2003-04-25 | 2004-10-28 | Michael Krivoruchko | Intravascular material removal device |
| US7578820B2 (en) | 2003-09-02 | 2009-08-25 | Moore Jeffrey D | Devices and techniques for a minimally invasive disc space preparation and implant insertion |
| US20050240193A1 (en) * | 2003-09-03 | 2005-10-27 | Kyphon Inc. | Devices for creating voids in interior body regions and related methods |
| US8784421B2 (en) | 2004-03-03 | 2014-07-22 | Boston Scientific Scimed, Inc. | Apparatus and methods for removing vertebral bone and disc tissue |
| US20050261692A1 (en) * | 2004-05-21 | 2005-11-24 | Scimed Life Systems, Inc. | Articulating tissue removal probe and methods of using the same |
| US20080103504A1 (en) | 2006-10-30 | 2008-05-01 | Schmitz Gregory P | Percutaneous spinal stenosis treatment |
| US8192435B2 (en) | 2004-10-15 | 2012-06-05 | Baxano, Inc. | Devices and methods for tissue modification |
| US20060229624A1 (en) * | 2005-03-31 | 2006-10-12 | Zimmer Technology, Inc. | Orthopaedic cutting instrument and method |
| US20070055259A1 (en) * | 2005-08-17 | 2007-03-08 | Norton Britt K | Apparatus and methods for removal of intervertebral disc tissues |
| US8123750B2 (en) * | 2005-08-17 | 2012-02-28 | Corespine Technologies, Llc | Apparatus and methods for removal of intervertebral disc tissues |
| US7914534B2 (en) | 2006-03-28 | 2011-03-29 | Loubert Suddaby | Disk preparation tool |
| US8137352B2 (en) | 2006-10-16 | 2012-03-20 | Depuy Spine, Inc. | Expandable intervertebral tool system and method |
| US20080114364A1 (en) * | 2006-11-15 | 2008-05-15 | Aoi Medical, Inc. | Tissue cavitation device and method |
| WO2008060277A2 (fr) | 2006-11-15 | 2008-05-22 | Aoi Medical, Inc. | Dispositif et procédé pour la cavitation d'un tissu |
| US20080243126A1 (en) | 2007-03-26 | 2008-10-02 | Robert Gutierrez | Rotary angled scraper for spinal disc space preparation |
| US8574253B2 (en) | 2007-04-06 | 2013-11-05 | Hologic, Inc. | Method, system and device for tissue removal |
| MX2009012552A (es) | 2007-05-21 | 2010-03-18 | Aoi Medical Inc | Dispositivo de cavitacion de articulacion. |
| US8394116B2 (en) * | 2008-04-15 | 2013-03-12 | The Regents Of The University Of Michigan | Surgical tools and components thereof |
| US8221425B2 (en) | 2008-04-30 | 2012-07-17 | Warsaw Orthopedic, Inc. | Percutaneous discectomy and endplate preparation tool |
| US8277506B2 (en) | 2008-06-24 | 2012-10-02 | Carefusion 2200, Inc. | Method and structure for stabilizing a vertebral body |
| US20100030216A1 (en) * | 2008-07-30 | 2010-02-04 | Arcenio Gregory B | Discectomy tool having counter-rotating nucleus disruptors |
| US8470043B2 (en) | 2008-12-23 | 2013-06-25 | Benvenue Medical, Inc. | Tissue removal tools and methods of use |
| US20100179557A1 (en) * | 2009-01-15 | 2010-07-15 | Husted Daniel S | Adjustable Powered Rongeur |
| US8394101B2 (en) | 2009-02-23 | 2013-03-12 | Globus Medical, Inc. | Discectomy instrument |
| US8142463B2 (en) * | 2009-03-13 | 2012-03-27 | Kyphon Sarl | Battery operated nucleus disruptor device for intervertebral disc |
| US20120157766A1 (en) * | 2009-05-21 | 2012-06-21 | The Regents Of The University Of Michigan | Device for endoscopic treatment of upper gastrointestinal bleeding |
| EP2451403B1 (fr) | 2009-07-09 | 2016-04-27 | R Tree Innovations, LLC | Système d'insertion d'implant intervertébrale |
| US8617164B2 (en) | 2009-09-24 | 2013-12-31 | Imds Corporation | Surgical rasping systems and methods |
| US20130072936A1 (en) * | 2009-11-10 | 2013-03-21 | John To | Angled grinder |
| EP2590579B1 (fr) * | 2010-07-07 | 2019-08-28 | Carevature Medical Ltd. | Dispositif chirurgical pour l'ablation de tissu |
| US20120109186A1 (en) | 2010-10-29 | 2012-05-03 | Parrott David A | Articulating laparoscopic surgical instruments |
-
2012
- 2012-05-14 BR BR112013029079A patent/BR112013029079A2/pt not_active IP Right Cessation
- 2012-05-14 RU RU2013150021/14A patent/RU2013150021A/ru not_active Application Discontinuation
- 2012-05-14 US US13/512,894 patent/US8845638B2/en active Active
- 2012-05-14 EP EP12724408.5A patent/EP2706931B1/fr active Active
- 2012-05-14 WO PCT/IB2012/052406 patent/WO2012153319A1/fr active Application Filing
- 2012-05-14 CA CA2835061A patent/CA2835061A1/fr not_active Abandoned
- 2012-05-14 JP JP2014509886A patent/JP2014519874A/ja active Pending
- 2012-05-14 CN CN201280022999.9A patent/CN103648415A/zh active Pending
- 2012-05-14 AU AU2012254824A patent/AU2012254824A1/en not_active Abandoned
-
2013
- 2013-05-14 CN CN201380024645.2A patent/CN104284632A/zh active Pending
- 2013-11-14 US US14/079,670 patent/US20140074096A1/en not_active Abandoned
- 2013-11-21 IL IL229546A patent/IL229546A0/en unknown
-
2014
- 2014-08-14 US US14/459,336 patent/US9254138B2/en active Active
- 2014-09-28 IL IL234856A patent/IL234856A0/en unknown
Also Published As
| Publication number | Publication date |
|---|---|
| JP2014519874A (ja) | 2014-08-21 |
| RU2013150021A (ru) | 2015-06-20 |
| US20140074096A1 (en) | 2014-03-13 |
| WO2012153319A1 (fr) | 2012-11-15 |
| US20150012000A1 (en) | 2015-01-08 |
| US20140058394A1 (en) | 2014-02-27 |
| US8845638B2 (en) | 2014-09-30 |
| CN103648415A (zh) | 2014-03-19 |
| CA2835061A1 (fr) | 2012-11-15 |
| CN104284632A (zh) | 2015-01-14 |
| US9254138B2 (en) | 2016-02-09 |
| BR112013029079A2 (pt) | 2017-02-07 |
| IL234856A0 (en) | 2014-12-31 |
| AU2012254824A1 (en) | 2014-01-09 |
| EP2706931A1 (fr) | 2014-03-19 |
| IL229546A0 (en) | 2014-01-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2706931B1 (fr) | Dispositif de rupture de tissu | |
| US8246622B2 (en) | Tool and corresponding method for removal of material from within a body | |
| US8328812B2 (en) | Tool and corresponding method for removal of material from within a body | |
| US11357516B2 (en) | Abrasive cutting surgical instrument | |
| US8915936B2 (en) | Discectomy instrument | |
| EP2919675B1 (fr) | Dispositif de positionnement de lame | |
| US9358029B2 (en) | Retrograde resection apparatus and method | |
| EP2037824B1 (fr) | Dispositifs et procédés de retrait d'un noyau de disque | |
| US7842058B2 (en) | Manipulation and cutting system and method | |
| US20130172895A1 (en) | Devices, systems and methods for tissue modification | |
| US20070055259A1 (en) | Apparatus and methods for removal of intervertebral disc tissues | |
| WO2008016886A9 (fr) | Dispositifs et procédés de découpe de tissu | |
| US20090054898A1 (en) | Articulating Shaper | |
| WO2011060077A1 (fr) | Meule inclinée | |
| US10080572B2 (en) | Methods and devices for removing a spinal disc |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20131127 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| 17Q | First examination report despatched |
Effective date: 20140505 |
|
| 17Q | First examination report despatched |
Effective date: 20140526 |
|
| DAX | Request for extension of the european patent (deleted) | ||
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20141120 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 721500 Country of ref document: AT Kind code of ref document: T Effective date: 20150515 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602012006736 Country of ref document: DE Effective date: 20150528 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: VDEP Effective date: 20150415 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 721500 Country of ref document: AT Kind code of ref document: T Effective date: 20150415 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150415 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150415 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150817 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150415 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150415 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150415 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150715 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 4 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150415 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150415 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150415 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150815 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150716 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602012006736 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150531 Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150415 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150415 Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150415 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150531 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150415 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150415 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150415 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150415 Ref country code: RO Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150415 |
|
| 26N | No opposition filed |
Effective date: 20160118 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150514 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 5 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150415 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150415 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150415 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 6 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150415 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150415 Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20120514 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150415 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150415 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150415 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150514 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 7 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150415 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150415 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R081 Ref document number: 602012006736 Country of ref document: DE Owner name: SEASPINE, INC. (N.D.GES.D. STAATES DELAWARE), , US Free format text: FORMER OWNER: NLT SPINE LTD., KFAR SABA, IL |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: 732E Free format text: REGISTERED BETWEEN 20230525 AND 20230601 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230520 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20240419 Year of fee payment: 13 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20240418 Year of fee payment: 13 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20240418 Year of fee payment: 13 |