EP2702272B1 - Pump system - Google Patents
Pump system Download PDFInfo
- Publication number
- EP2702272B1 EP2702272B1 EP12724580.1A EP12724580A EP2702272B1 EP 2702272 B1 EP2702272 B1 EP 2702272B1 EP 12724580 A EP12724580 A EP 12724580A EP 2702272 B1 EP2702272 B1 EP 2702272B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- manipulated variable
- operating parameter
- limit value
- actual operating
- actual
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Not-in-force
Links
Images







Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B49/00—Control, e.g. of pump delivery, or pump pressure of, or safety measures for, machines, pumps, or pumping installations, not otherwise provided for, or of interest apart from, groups F04B1/00 - F04B47/00
- F04B49/06—Control using electricity
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B17/00—Pumps characterised by combination with, or adaptation to, specific driving engines or motors
- F04B17/03—Pumps characterised by combination with, or adaptation to, specific driving engines or motors driven by electric motors
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B49/00—Control, e.g. of pump delivery, or pump pressure of, or safety measures for, machines, pumps, or pumping installations, not otherwise provided for, or of interest apart from, groups F04B1/00 - F04B47/00
- F04B49/06—Control using electricity
- F04B49/065—Control using electricity and making use of computers
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04C—ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT PUMPS
- F04C14/00—Control of, monitoring of, or safety arrangements for, machines, pumps or pumping installations
- F04C14/06—Control of, monitoring of, or safety arrangements for, machines, pumps or pumping installations specially adapted for stopping, starting, idling or no-load operation
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04C—ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT PUMPS
- F04C2/00—Rotary-piston machines or pumps
- F04C2/08—Rotary-piston machines or pumps of intermeshing-engagement type, i.e. with engagement of co-operating members similar to that of toothed gearing
- F04C2/12—Rotary-piston machines or pumps of intermeshing-engagement type, i.e. with engagement of co-operating members similar to that of toothed gearing of other than internal-axis type
- F04C2/14—Rotary-piston machines or pumps of intermeshing-engagement type, i.e. with engagement of co-operating members similar to that of toothed gearing of other than internal-axis type with toothed rotary pistons
- F04C2/16—Rotary-piston machines or pumps of intermeshing-engagement type, i.e. with engagement of co-operating members similar to that of toothed gearing of other than internal-axis type with toothed rotary pistons with helical teeth, e.g. chevron-shaped, screw type
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B2203/00—Motor parameters
- F04B2203/02—Motor parameters of rotating electric motors
- F04B2203/0204—Frequency of the electric current
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04C—ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT PUMPS
- F04C2240/00—Components
- F04C2240/40—Electric motor
- F04C2240/403—Electric motor with inverter for speed control
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04C—ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT PUMPS
- F04C2240/00—Components
- F04C2240/70—Use of multiplicity of similar components; Modular construction
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04C—ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT PUMPS
- F04C2240/00—Components
- F04C2240/80—Other components
- F04C2240/81—Sensor, e.g. electronic sensor for control or monitoring
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04C—ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT PUMPS
- F04C2270/00—Control; Monitoring or safety arrangements
- F04C2270/05—Speed
- F04C2270/052—Speed angular
- F04C2270/0525—Controlled or regulated
Definitions
- the invention relates to a displacement pump system with a positive displacement pump module according to the preamble of patent claim 1 (hereinafter also referred to as pump module), which is preferably designed as a, in particular multi-spindle, screw pump.
- pump module a positive displacement pump module
- the pump system includes a drive module for driving the pump module, the drive module being replaceable independently of the pump module, i. releasably connected to the pump module.
- the drive module comprises, in addition to an electric drive motor, a frequency converter assigned thereto for regulating or setting a drive motor rotational speed.
- the pump system comprises control means with a logic and a controller for generating a manipulated variable as a function of a reference variable and at least one actual operating parameter, such as a fluid pressure and / or a volumetric flow.
- control means with a logic and a controller for generating a manipulated variable as a function of a reference variable and at least one actual operating parameter, such as a fluid pressure and / or a volumetric flow.
- the pump system as judges a higher-level control system.
- the reference variable can be preset manually, for example by a corresponding setting on the control means and then generated by the control means itself and / or by a simple voltage source separate from the control means and outputting an electrical voltage value as a reference variable.
- Today's displacement pump motors for driving positive displacement pumps include a frequency converter with integrated controller, which is able to control the input signal, in particular a voltage signal for the frequency converter in dependence on a measured actual operating parameter and a reference variable to be achieved.
- the controller transmits the manipulated variable determined as a function of the reference variable to the frequency inverter "without criticism".
- the problem with this is that the controller associated with the frequency converter is designed today only engine-specific, that is not optimized with respect to the actual interest in Verdrängerpumpensystemen positive displacement pump. This can lead to problems with positive displacement pump systems, since positive displacement pumps in principle pose an increased risk for the pump itself and / or for further process units compared to centrifugal pumps. This is due to the characteristic behavior different from turbomachines attributed by positive displacement pumps. In principle, even in extreme cases, this can lead to complete self-destruction or sustained disruption of the positive-displacement pump, especially if signs of damage are not detected in time.
- the document DE 20 2005 001746 discloses a control system for pumps with a frequency converter for adjusting an engine speed.
- the present invention seeks to provide a pump system that guarantees increased safety for other process units and for the pump module itself.
- the variability for the end customer should be increased and an optimized in terms of optimum functionality and longevity of the pump module speed control should be possible.
- the invention is based on the idea of separating the control means previously integral with the frequency converter, in order to separate a control module which is separate from the drive module, i. to obtain independent control module, in which the logic means, possibly with database and, preferably designed as a PI or PID controller, controller is provided, thus independent of the frequency in dependence of a reference variable and at least one actual operating parameter (actual System parameter) to provide an input signal (manipulated variable) for the frequency converter, which is then converted by the drive module, more precisely by the frequency converter by a corresponding Wicklungsbestromung in an engine speed.
- the logic means possibly with database and, preferably designed as a PI or PID controller, controller
- the invention also makes it possible to use very simply constructed frequency converter, which act in the simplest case as a controller that set the predetermined speed of the separate control module speed command, for example, designed as an asynchronous motor by appropriate current influencing.
- very simply constructed frequency converter which act in the simplest case as a controller that set the predetermined speed of the separate control module speed command, for example, designed as an asynchronous motor by appropriate current influencing.
- previously used "intelligent" frequency converter but this is then preferably not used in the previous manner, i. be controlled.
- a possibly contained PI or PID controller of the frequency converter is therefore preferably not supplied with a pressure sensor signal and not with a flow rate signal and not a vibration sensor signal and not with a temperature sensor signal and not with a torque sensor signal, with the aim on this input base a manipulated variable, in particular to generate in the form of a speed command signal - but this control variable is obtained from the separate control module and implemented by the frequency converter in a conventional manner in an engine speed.
- Verdrängerpumpensystem In addition to the simplified interchangeability of the drive module independent of the actual control (control means or control module) for generating the variable to be converted by the variable manipulated variable (possibly a later yet to be explained corrected manipulated variable), formed according to the concept of the invention Verdrängerpumpensystem further significant advantages. It is thus possible for the first time to use a logic (logic means) optimized specifically for the pump module with suitable pump module-specific software and a controller optimized for the actual pump process, preferably an optimally selected PI or PID controller. Prefers is the, in particular a microcontroller comprehensive logic associated software that is specially adapted to the pump module used, so that the actual drive motor can be replaced independently of the pump module and the control module, without affecting the configuration of the pump module via the control module.
- the control module for the first time offers the possibility of monitoring the pump module independently of any control room and regulating it by means of speed control, wherein the logic is preferably designed to detect impermissible operating conditions (impermissible system actual parameters) and If necessary, reduce the pump module by adapting the setpoint speed to be set by the frequency inverter to a safe operating point by reducing the setpoint speed as the input signal for the frequency inverter.
- the logic is preferably designed to detect impermissible operating conditions (impermissible system actual parameters) and If necessary, reduce the pump module by adapting the setpoint speed to be set by the frequency inverter to a safe operating point by reducing the setpoint speed as the input signal for the frequency inverter.
- the logic is designed in such a way that upon detection of a critical system actual parameter (in particular by comparison with limit values stored in this database) either one, in particular stored in a database, safe, preferably a (further) damage to the pump module preventing setpoint speed or Assigns manipulated variable or an adjusted system setpoint parameters due to which the integral controller of the control module outputs a, preferably lower, setpoint speed as a manipulated variable.
- the setpoint speed specified by the logic can in extreme cases be zero, but is preferably located in a speed range greater than zero, so that the actual process can continue despite critical system actual parameters.
- a control module higher-level control (control room) are provided with advantage as judgessdorfnvorgabesch, with the one due to an actual operating parameter predetermined by the control module manipulated variable (or a later to be explained corrected manipulated variable) is over-tunable, for example, not to endanger the process as such.
- the control room can preferably specify a control variable other than that specified by the control module, in particular a speed specification, which is then converted by the frequency converter into a rotational speed of the drive module.
- the regulation of the speed setpoint signal is not carried out in the control module, but in the control room.
- control module is used by the control room as an auxiliary controller, such that the system nominal parameter to be adjusted is determined by the control room, ie a system nominal parameter provided by the control module is overruled, in particular to have negative effects on the actual process in which The pump module is integrated, not to endanger.
- control room and / or the control module is designed to output a start and / or stop signal for the motor of the drive module.
- control module or its intelligence is preferably configured in such a way that the main aim is to ensure a long service life of the pump module or to prevent lasting damage from this.
- This is realized with advantage in such a way that, if a critical actual operating parameter was measured and the manipulated variables were recognized as critical by the logic, this is either dictated by this one setpoint speed and converted by the drive module, or influenced by the logic of the system setpoint parameter
- the goal is that by modifying the controller of the control module regulates a lower target speed.
- This control task is then taken over by the control room, which can override the control module from case to case or under predetermined conditions, for example such that instead of a provided by the logic of the control module target speed directly from the control room predetermined manipulated variable, in particular target speed signal to the frequency the drive module is passed (the control of this signal is preferably taken over by the control room) and / or in that instead of one of the logic of the control module in dependence If a measured system actual parameter is actually provided, another (corrected) manipulated variable is specified by the control room as the input value for the controller of the control module.
- control module is arranged spatially separated from the drive unit in a separate control module housing from the drive unit and / or the frequency converter, preferably at a minimum distance of 0.5 m, preferably 1 m or more.
- the control module housing is preferably assigned at least one, preferably digital, signal input for receiving the actual operating parameter, for example from a sensor module and / or from an optionally provided control room. Additionally or alternatively, the control module housing is assigned a, in particular analog, signal input for receiving an actual operating parameter and / or a command variable from the control room.
- the housing is also assigned a manipulated variable output signal output, in particular a speed setpoint signal output via which the manipulated variable generated by the controller of the control module (possibly a corrected manipulated variable) in the direction of the frequency converter of the drive unit and / or a speed setpoint signal in the direction or respectively predetermined by the control room .
- a manipulated variable output signal output in particular a speed setpoint signal output via which the manipulated variable generated by the controller of the control module (possibly a corrected manipulated variable) in the direction of the frequency converter of the drive unit and / or a speed setpoint signal in the direction or respectively predetermined by the control room .
- a command variable for example, a desired volume flow or a desired pressure of the fluid generated control variable, preferably a voltage signal not directly, ie uncritically or without plausibility, ie review as an input signal to the frequency converter, but the manipulated variable, or a later to be explained by possibly additionally provided, in particular second, correction means obtained corrected manipulated variable or according to a functional relationship from the manipulated variable or the corrected manipulated variable determined comparison value with at least a first limit (pump protection limit) to compare the at least one first limit value reflects a risk potential for the positive displacement pump and / or another process unit.
- a command variable for example, a desired volume flow or a desired pressure of the fluid generated control variable, preferably a voltage signal not directly, ie uncritically or without plausibility, ie review as an input signal to the frequency converter, but the manipulated variable, or a later to be explained by possibly additionally provided, in particular second, correction means obtained corrected manipulated variable or according to a functional relationship from the manipulated variable or the corrected
- the first limit value is not a static limit value, ie a fixed or fixed limit value (which of course additionally a comparison can also be made with such fixed limit values), but a dynamically determined limit value, which is calculated on the basis of an actual operating parameter.
- the limit value is currently calculated as a function of a plurality of actual operating parameters, wherein these actual operating parameters may be the first actual operating parameter, ie an actual controlled variable from the controlled system, on the basis of which the controller determines and corrects the manipulated variable at least one further, ie another actual operating parameter, which is either measured directly by means of a sensor or calculated on the basis of an actual value, in particular simulated.
- the advantage of the invention is that it not only works with static limits, but according to the invention takes into account that the limits are subject to dynamics, ie can change in operation of the positive displacement pump in response to changing actual operating parameters.
- a corrected manipulated variable is provided with the aid of first correction means, with which preferably the manipulated variable generated by the controller or an already previously corrected manipulated variable that has been generated, for example, by second correction means is overwritten.
- the corrected manipulated variable assumes the maximum or minimum permissible value, that is to say preferably a first, currently calculated limit value in order to come as close as possible to the reference variable or more precisely the manipulated variable directly resulting from the reference variable.
- the corrected manipulated variable is a quantity covered by a first limit value (preferably a correspondingly limited voltage signal).
- the Verdoller pump protection ensuring limit can be determined by the controller in response to the command variable manipulated variable or a corrected manipulated variable, (for example, a correcting variable received from first correction means, in particular the corrected correcting variable output by the first correcting means or a currently calculated comparative value are compared with at least one second limiting value (conveying fluid protection limit value) whose adherence or not exceeding is to ensure the quality of the conveying fluid. or falling below the second limit (with a defined probability) a predetermined Affect the quality parameters of the pumped with the positive displacement fluid.
- a corrected manipulated variable for example, a correcting variable received from first correction means, in particular the corrected correcting variable output by the first correcting means or a currently calculated comparative value are compared with at least one second limiting value (conveying fluid protection limit value) whose adherence or not exceeding is to ensure the quality of the conveying fluid. or falling below the second limit (with a defined probability) a predetermined Affect the quality parameters of the pumped with the positive
- a corrected manipulated variable is output by second correction means, which is preferably either directly or indirectly in the form of a comparison value to the comparison with the at least one first limit value or as an input variable (target specification) is passed to the frequency converter.
- the manipulated variable generated by the controller or the manipulated variable obtained from upstream further, for example, the first correction means, is preferably overwritten by the corrected manipulated variable of the second correction means.
- the second limit value is not a fixed, stored limit value, but rather a second limit value calculated on the basis of a plurality of current actual operating parameters, wherein the actual operating parameters used in the calculation are the first actual operating parameter, in particular an actual control variable, and additionally a different (further) measured actual operating parameter or an actual operating parameter calculated, in particular based on an actual value.
- the actual operating parameters used in the calculation are the first actual operating parameter, in particular an actual control variable, and additionally a different (further) measured actual operating parameter or an actual operating parameter calculated, in particular based on an actual value.
- a comparison of a manipulated variable, a corrected manipulated variable, a comparison value and / or an actual operating parameter can be performed with a fixed delivery fluid limit and in case of exceeding or falling below a correction of the manipulated variable or the corrected manipulated variable can be performed.
- a manipulated variable, a corrected manipulated variable or a comparison value either against at least one first (pump protection) limit value or only against a second (conveying fluid protection) limit value or alternatively against both at least one first (pump protection) limit value.
- Limit value and additionally against at least a second (Förderfluidschutz-) limit value which in turn alternatively first against at least a first threshold and then subsequently against at least a second threshold can be compared, or conversely first against a second threshold and subsequently against a first threshold.
- a logic which ensures that the controller output signal (control variable) initially compared with at least a first and / or at least a second limit (pump protection limit and / or bainfluidschutz limit) is, wherein the at least one first and the at least one second threshold current, ie is calculated taking into account a measured or calculated actual operating parameter and that, in the event that an above or below the at least one first limit value and / or the at least one second limit value is determined, generates a corrected manipulated variable and then this instead of the from the controller originally generated manipulated variable or instead of an already previously corrected manipulated variable as an input signal to the frequency converter (frequency converter) is passed, which energizes the positive displacement motor based on this target specification.
- a logic logic
- the logic means in hardware separately from the controller, for example in the form of a microcontroller separate from the controller.
- the logic means several sets of system parameters are stored, which are specific for different positive displacement pumps (ie each record is specific to a positive displacement pump), in particular for different types and Sizes of positive displacement pumps and which can be selected between these data sets, in particular in a basic configuration, for example via a menu control. In this way it is possible to use the same control means in connection with different positive displacement pumps.
- control means enable possible negative effects on current, changing operating parameters of a reference variable or the effects of a manipulated variable directly resulting from the reference variable on the integrity of the positive displacement pump and / or on the product quality, i. the quality of the means of the positive displacement pump delivered delivery fluid on the basis of a comparison with a situational determined, i.
- the corrected manipulated variable is preferably the first or second limit value calculated by the jointly or alternatively provided first or second limit value adjusting means.
- the control means take into account all the above parameters for controlling the frequency converter, wherein preferably the pump speed in the form of the manipulated variable is taken into account finds, the conveying fluid pressure, preferably measured at or near the pressure port or alternatively calculated from other parameters, as the first actual operating parameter and the conveying fluid viscosity or a parameter, in particular a fluid parameter to which the conveying fluid viscosity is in a physical context, in particular the delivery fluid temperature as the second operating parameter, wherein the aforementioned first actual operating parameter, ie the conveying fluid pressure and the further actual operating parameter, preferably the conveying fluid viscosity or the conveying fluid temperature are taken into account by means of the first limiting value specification means in order to calculate the first limiting value whose exceeding or falling below a D binPark the positive displacement pump could have resulted.
- the comparison means then compare the control variable output by the controller, ie a speed signal with the first limit value, wherein first correcting means output a corrected manipulated variable, ie a corrected speed signal in the event that the manipulated variable output by the controller, taking into account the conveying fluid pressure and the conveying fluid viscosity or of a parameter related thereto in a functional context.
- first correcting means output a corrected manipulated variable, ie a corrected speed signal in the event that the manipulated variable output by the controller, taking into account the conveying fluid pressure and the conveying fluid viscosity or of a parameter related thereto in a functional context.
- the corrected manipulated variable ie the corrected speed signal is preferably the first, previously calculated using the first threshold value setting means limit value.
- a delivery fluid volume flow or the pump speed reflecting the delivery volume flow
- a delivery fluid pressure are used as reference variables.
- This preferred embodiment does justice to the case that frequently occurs in practice that a rapid change in the disturbance, e.g. a sudden flow resistance change leads to a very rapid change in pressure and thus to a rapid change in the torque requirement at the pump. In the case of a rapid pressure reduction for large pump drives, this would lead to a rapid speed increase.
- An impermissible speed increase can be prevented by taking into account the delivery fluid pressure, preferably measured at the discharge nozzle as a first operating parameter and the direct or indirect consideration of the delivery fluid viscosity as a second operating parameter in the calculation of the first limit, so that damaging the pump fails.
- the conveying fluid pressure, the delivery fluid volume flow or the rotational speed or also the delivery fluid viscosity or a parameter, in particular a fluid parameter, of which the delivery fluid viscosity is directly dependent preferably come into consideration.
- the manipulated variable is preferably the rotational speed or a rotational speed signal, wherein for calculating the limit value, in particular a maximum permissible rotational speed, a delivery fluid volume flow is considered as the first operating parameter and the delivery fluid pressure (in particular measured at the discharge port of the pump) is taken into account as a further actual operating parameter.
- the comparison with the at least one limit value can be realized in different ways.
- the manipulated variable generated by the controller is used for comparison with the first limit value, or alternatively the corrected manipulated variable output by the first correction means or by the optionally provided further, for example second, correction means.
- the manipulated variable generated by the controller for the comparison with the second limit value or a corrected manipulated variable, wherein the corrected manipulated variable may be the corrected manipulated variable output by the first correcting means, if present, or that of the second correction means output corrected correcting variable. It is also possible to have a comparison value, e.g. calculate a current shear rate based on one of the above values and use this for comparison.
- the logic means may be the manipulated variable generated by the controller, a corrected manipulated variable or a comparison value calculated on the basis of the manipulated variable and / or the corrected manipulated variable or an actual operating parameter, in particular the first actual operating parameter and / or the further actual operating parameter also with at least one positive displacement pump associated with the control means, fixed limit value are compared, wherein in the event that such a limit value is exceeded or fallen below by a certain level of correction means, a corrected manipulated variable is output.
- a corrected manipulated variable is output by the correction means, this manipulated variable correction being corrected by first correction means and / or or may be upstream or downstream by second correction means.
- the corrected manipulated variable is a manipulated variable signal which is increased or reduced by a specific factor, or a manipulated variable signal which assumes a value stored in a memory, or a simulated, calculated value for which an overshoot or undershoot of the value Limit value is not expected.
- the last-described embodiment of the control means is primarily used to detect a sudden damage or sudden damage of the positive displacement pump. If, for example, a vibration parameter is monitored by sensor means as the measured actual operating parameter and if it exceeds a limit value stored in a nonvolatile memory or preferably alternatively or additionally a limit value determined as a function of a measured actual parameter, then the manipulated variable corresponding to the reference variable is not passed on, but one , For example, reduced by a factor of 2 calculated manipulated variable to operate the positive displacement pump as long as possible without any damage, such as bearing damage occurs or worsened, for which the increased vibration value can be an indication.
- the controller is designed as a PI controller or as a PID controller.
- the first actual operating parameter which is supplied to the controller for determining a manipulated variable and based on which the first (pump protection) limit value and / or the second (Förderfluidschutz-) limit value is calculated if necessary, and the If necessary, it is used for the calculation of the corrected manipulated variable by the correction means.
- this first actual operating parameter is a preferably measured, actual controlled variable from the controlled system, in particular a so-called actual main controlled variable, for example an actual pressure of the conveying fluid or an actual pressure difference of the conveying fluid, for example between suction side and pressure side Positive displacement pump or to an actual volume flow of the fluid.
- the first operating parameter is preferably measured, but can alternatively also be simulated or calculated, in particular from a plurality of further actual operating parameters.
- the first and / or second limit value must be calculated not only on the basis of the first actual operating parameter supplied to the controller, but additionally on the basis of a functional relationship on the basis of another (further) actual operating parameter.
- the at least one further actual operating parameter can be a measured auxiliary variable or, in particular, the frequency converter calculated on the basis of an actual value measured, for example a frequency reference of the frequency converter or a torque reference of the frequency converter. It is also possible that at least one further actual operating parameter is a measured or calculated on the basis of an actual value auxiliary control variable, in particular a speed of the positive displacement motor or a torque of the positive displacement motor.
- At least one further actual operating parameter can be included in the calculation of the first and / or second limit value and / or in the calculation of a corrected manipulated variable and / or in the calculation of a comparison value by a measured temperature, for example a conveying fluid temperature or a bearing temperature, in particular a rolling bearing of a drive spindle of the positive displacement pump act. It is also possible for the at least one further actual operating parameter to be a measured vibration value. It is also possible for the at least one further actual operating parameter to be a measured or calculated delivery fluid viscosity. It is also possible for the at least one further actual operating parameter to be a measured leakage quantity.
- first actual operating parameter only a single further actual operating parameter is taken into account in the calculation of a limit value or a corrected manipulated variable but, for example, additionally for the first auxiliary operating parameter two or more further, preferably different actual operating parameters.
- the at least one further operating parameter may be a measured actual control variable, for example a measured actual main control variable, for example an actual pressure of the conveying fluid, an actual pressure difference or a actual flow.
- an actual pressure is measured as the operating parameter, for example an overpressure on the discharge nozzle of the positive displacement pump, too high a pressure can be hazardous to the positive displacement pump, in particular a bursting possibility.
- the maximum allowable pressure may be dependent on other actual operating parameters, such as the temperature of the conveying fluid.
- Too little pressure at the suction nozzle can be used as a cavitation indicator.
- the delivery fluid viscosity is taken into account, in particular for metrological reasons representative of the viscosity of the delivery fluid whose measured temperature.
- the temperature can thus be additionally or alternatively monitored by a pressure as actual operating parameters.
- An excess temperature of the conveying fluid can be hazardous to the pump, in particular with regard to a possible bearing damage.
- the engine speed can be taken into account in accordance with a fixed assignment or function which is directly proportional to the positive displacement pump speed (spindle speed), in particular corresponds to this. Too high or too low a speed can also be a risk, especially if further operating parameters, such as the temperature and / or the pressure exceeds or falls below certain limits.
- vibrations of the positive-displacement pump and / or of the positive-displacement pump motor can occur be monitored. Excessive vibrations jeopardize the alignment between positive displacement pump motor and positive displacement pump with the possible consequence of bearing damage to the positive displacement pump and / or the positive displacement motor. Even with impermissible vibrations mechanical seal damage is possible. Overall, the life of the positive displacement pump can be reduced by impermissible oscillations, in particular if further actual operating parameters, such as the rotational speed and / or the temperature and / or the pressure exceed or fall below certain limits.
- the viscosity of the conveying fluid which is functionally related to the conveying fluid temperature, can be taken into account directly or indirectly via the temperature in determining a limit value, a corrected manipulated variable or, if provided, a comparison value. Too low a viscosity can be hazardous to the pump because of the resulting decreasing lubricating properties of the fluid between the spindles. Too high a viscosity may be positive displacement pump motor hazard, so that the torque increases too much.
- too high a viscosity can be a risk of displacement, for example when using a magnetic coupling, which can break off unnoticed due to too high a viscosity, which leads to the destruction of the positive displacement pump or the magnetic coupling.
- At least one of the following actual operating parameters be monitored, for example, the torque which is functionally dependent on the viscosity of the conveying fluid.
- the torque can be taken into account as an indicator of an increasing displacement of the positive displacement pump.
- the positive displacement pump motor current can be included in the calculation of a limit value, a corrected manipulated variable or, if provided, in a comparison value.
- the motor current is a simple and inexpensive to measure Size, especially at constant other parameters, such as the viscosity of the torque, which in turn may indicate wear of the pump.
- the leakage rate can be monitored. This is based on the idea that each mechanical seal requires a nominal leakage in order to lubricate the static and dynamic components of the mechanical seal. If the leakage rate increases, this can be an indicator of incipient mechanical seal damage.
- the manipulated variable generated by the controller or the manipulated variable corrected by the correction means should be compared with a first or second limit value, but additionally or alternatively for this comparison a comparative value should be calculated, which is in a functional relationship to the manipulated variable or is the corrected manipulated variable, may be included in the calculation of this comparison value based on a functional relationship of several of the aforementioned actual operating parameters, in particular the first actual operating parameters and at least one of the other actual operating parameters.
- first and / or second limiting value specification means and / or the first or second correction means take into account in their calculations for the displacement pump-specific geometry parameters assigned to the control means, for example a gap width and / or a spindle diameter.
- the limit value specification means and / or the correction means may be designed taking into account a delivery fluid parameter stored in a storage, in particular a shearing behavior of the delivery fluid.
- the at least one measured actual parameter for example the first actual operating parameter or a further actual parameter
- the at least one measured actual parameter is not fed directly by sensor means into the control means but at the at least one actual operating parameter to the control means of a process control room is transmitted, in particular, as will be explained later, via a bus system.
- a shear rate is taken into account, in particular a maximum permissible shear rate stored in a memory and / or a shear rate currently calculated using at least one actual operating parameter according to a functional relationship is taken into account.
- a static limit value analysis takes place in which the manipulated variable, a corrected manipulated variable, a comparison value or directly a first operating parameter and / or a further operating parameter with one in a preferably non-volatile memory
- the limit value stored in the logic means is / are compared and, if the limit value should be exceeded or undershot by a predetermined amount, a corrected manipulated variable is determined and output so as not to jeopardize the pump or product quality.
- the manipulated variable predetermined by the controller or, based on a preceding comparison, already corrected manipulated variable can be increased or reduced by a predetermined amount, in particular a predetermined factor.
- a second or second correction means may take into account a delivery fluid parameter (fluid-specific property value / constant) in accordance with a mathematical function or assignment which is stored, for example, in a non-volatile memory of the control means.
- Prefers can be selected under different fluid parameter data sets manually or automatically, for example, depending on a measurement result.
- the shear behavior of the conveying fluid is preferably taken into account as the conveying fluid parameter, in particular if a shear gradient is used to determine a limiting value or a corrected actuating variable.
- the logic means for determining and / or signaling a maintenance due date of the positive displacement pump are designed as a function of a measured or calculated actual operating parameter and / or as a function of a displacement-pump-specific parameter assigned to the control means.
- the logic means preferably comprise a corresponding functional unit which takes into account the measured or calculated actual parameter and / or the displacement-pump-specific parameter in determining the maintenance due date.
- This functional unit preferably calculates the maintenance due date based on a predetermined (functional) assignment.
- the maintenance due date is preferably signaled via corresponding signaling means, for example a display and / or an LED traffic light, which can emit different color signals.
- the first and / or second correction means are designed such that, in the event that the limit value is exceeded or fallen below by a predetermined, in particular very high or very low value, a stop signal for the positive displacement pump motor, in particular emit for a motor contactor, due to which the positive displacement pump motor is stopped, in particular to avoid further endangering the positive displacement pump or other process units or the quality of the conveying fluid.
- control means are designed to communicate via a bus system, in particular a CAN bus system, in particular in order to communicate with other positive displacement pump control means and / or a process control system, ie transmit and / or receive data can.
- a bus system in particular a CAN bus system, in particular in order to communicate with other positive displacement pump control means and / or a process control system, ie transmit and / or receive data can.
- a CAN bus system is assigned, which is known mainly from the automotive industry. This bus system is surprisingly found to be particularly reliable and robust in connection with positive displacement pump systems.
- control means are assigned input means, in particular in the form of at least one key, preferably in the form of a plurality of keys and / or a touch screen, etc. in order to be able to configure and / or read out the control means.
- input means in particular in the form of at least one key, preferably in the form of a plurality of keys and / or a touch screen, etc.
- one of a plurality of system parameter data sets and / or delivery fluid parameter data sets stored in a non-volatile memory can be selected via the input means.
- control means have memory means which are designed and controlled to store, in particular also to log, received, calculated and / or transmitted data, in particular measured values or voltage profiles.
- the memory means are particularly preferably designed and controlled in order to store measured actual operating parameters and / or reference variables and / or manipulated variables and / or corrected manipulated variables.
- the system preferably also comprises at least one sensor (sensor means), preferably at least two sensors, which are connected to the control means in signal-conducting fashion, the sensor or the sensors for measuring the first actual operating signal and possibly at least one further actual sensor.
- Operating signal is formed and arranged.
- a pressure sensor for determining a fluid pressure, in particular a differential pressure and / or a temperature, for example a delivery fluid temperature or a storage temperature.
- the control means are signal-connected to the frequency converter in order to receive an actual auxiliary manipulated variable as the first and / or at least one further actual operating parameter, in particular a rotational frequency setpoint or a torque setpoint from the frequency converter.
- the logic of the control module is designed to detect and / or signaling a maintenance need of the pump module, depending on the evaluation of an actual operating parameter, which, if necessary, of the logic in terms of maintenance relevance, in particular is verifiable with the inclusion of a database. It is particularly expedient if the logic is designed or programmed in such a way that a need for maintenance is detected in sufficient time before an intervention actually required in order to be able to determine a period or a period until the recommended implementation of the service implementation. As will be explained later, the maintenance requirement or the recommended period until the maintenance is carried out in the case of providing several control modules of a, so-called master box of the control modules. The communication with this master box can take place, for example, via a bus system, in particular a CAN bus system.
- control module is associated with a control system for communicating with a control room and / or with a further control module and / or with a sensor module or that the control module is connected to such a bus system.
- a known from the automotive industry CAN bus system has been found to be particularly advantageous, reliable and robust in connection with a pump system.
- the preferred provided sensor module may alternatively communicate via a digital connection and / or analog connection with the control module and / or a control room.
- each control module is associated with a displacement pump module and in consequence a drive module.
- control module is designed to receive and store data that it receives from other control modules of the system, for example, status information and / or from Systemist parameters (actual operating parameters) and / or speed setpoint signals and / or system setpoint parameters.
- such a master box additionally or alternatively with signaling means, such as a screen, a lights, in particular LED traffic lights, and / or a speaker equipped to communicate with a user or to signal the user an event can, for example a fault and / or the need for maintenance, including, if applicable, a suggested maintenance period until the actual due date of the maintenance.
- signaling means such as a screen, a lights, in particular LED traffic lights, and / or a speaker equipped to communicate with a user or to signal the user an event can, for example a fault and / or the need for maintenance, including, if applicable, a suggested maintenance period until the actual due date of the maintenance.
- the at least one sensor module there are different possibilities.
- This can be, for example, as a vibration sensor, in particular for detecting critical oscillations of the pump module and / or with a pressure sensor for detecting an actual pressure and / or as a temperature sensor for determining an actual temperature and / or as a flow rate sensor for detecting an Ist diehnes and / or as a torque sensor for detecting a torque be formed of the pump module.
- a vibration sensor in particular for detecting critical oscillations of the pump module and / or with a pressure sensor for detecting an actual pressure and / or as a temperature sensor for determining an actual temperature and / or as a flow rate sensor for detecting an Ist dies and / or as a torque sensor for detecting a torque be formed of the pump module.
- a pressure sensor for detecting an actual pressure and / or as a temperature sensor for determining an actual temperature and / or as a flow rate sensor for detecting an Ist dies and / or as a torque sensor for detecting
- a database with system-specific information, in particular pump-module-specific information is provided in the control module, which can be accessed by the logic of the control module so as to be able to specify a suitable setpoint speed and / or a suitable system setpoint parameter for the controller of the control module ,
- control module comprising a logic and a controller, in particular a PI or PID controller, for generating a manipulated variable, in particular a speed setpoint signal for a drive unit as a function of at least one system actual parameter and as a function of a reference variable, wherein the reference variable is preferably predetermined by a control room.
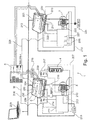
- the displacement pump system 1 shown in the figures comprises a first and a second control module 202, 203, of which the control module (first control module 202) shown on the left in the drawing is equipped as a so-called master box with signaling means 204 in the form of a screen 205 and an LED -Ampel 6.
- the first control module 202 (master box) is designed as a data storage unit (data logger) which is connected to the second control module 203 in a signal-conducting manner and transmits data such as actual operating parameters, command values or predefined data Save speeds and preferably with a time code provides.
- the signaling means 204 are used to signal controls or to display maintenance requirements or time proposals for carrying out the maintenance, which are determined by the first control module 202 and / or the second control module 203 or optionally further, not shown, control modules.
- the first control module 202 is associated with a drive module 207, comprising an electric, designed here as an asynchronous motor drive 3 and a frequency converter 4 associated therewith, which is shown separately only for better illustration and preferably arranged directly on the drive motor 3.
- a drive module 207 comprising an electric, designed here as an asynchronous motor drive 3 and a frequency converter 4 associated therewith, which is shown separately only for better illustration and preferably arranged directly on the drive motor 3.
- the drive module 207 is operatively connected via a coupling 210 to a first pump module 211 designed as a screw-type pump.
- a sensor module 212 for detecting an actual operating parameter X is arranged, which in the embodiment shown with a vibration sensor is equipped to detect impermissible vibrations, which are then evaluated by the first control module 202, more precisely by integral logic means 7, in particular by comparison with stored in an integral database of the control module 202 information.
- Fig. 1 results is the first sensor module 212 via a bus system 213, here a CAN bus system, signal-conducting connected to the first control module 202.
- bus system 213 here a CAN bus system
- logic means 7 are integrated and a trained in the embodiment shown as a PID controller, also not shown for clarity, controller 6 for generating a later still to be explained control variable or a corrected manipulated variable for the first frequency which is not formed or alternatively not used or controlled and / or supplied with Systemistparameters is to generate a speed setpoint signal depending on a pressure signal and / or a flow rate signal and / or a vibration sensor signal and / or a temperature sensor signal and / or a torque signal itself.
- the first control module 202 like the second control module 203, has a plurality of inputs and outputs which are highlighted in the first control module 202 for better visualization.
- the first control module 202 includes analog inputs 214, via one of which the first control module 202 is signal-connected to a higher-level control room (command value setting means 8). Via a connection formed here as an analog connection 216, the control room can transmit a command variable W or, alternatively, a control variable, the latter being looped through the first control module 202, for example, and routed to the first frequency converter 4 via one of preferably several analog outputs 217.
- the first control module 202 is also able to independently generate a manipulated variable, in particular a speed setpoint signal as a function of a reference variable W, an actual operating parameter X and at least one further operating parameter with which the first frequency converter 4 is actuated ,
- the first control module 202 not only communicates via the bus system 213 with the sensor module 212 or receives data from it, but is also connected to the second control module 203 via the bus system 213 embodied as a CAN bus system.
- control room Via a digital connection 228, the control room (example for reference variable specification means 8) can transmit to the second control module 203 an engine input and an engine output signal, on the basis of which the second control module 203 controls the drive module 224.
- sensor modules 212, 227 designed as vibration sensor modules
- further sensors or sensor modules, each with one or more sensors may be provided in order to detect a wide variety of systemic parameters in the area of the respective pump module 211, 226.
- a computer 229 may be provided which preferably communicates via the bus system 213 with the control modules 202, 203.
- the first control module 202 in addition to the signaling means 204 and input means 230 for making, preferably menu-driven inputs.
- the second control module 203 is in contrast to the first control module 202 not formed as a data storage unit for storing other control modules data and includes in the embodiment shown only a second LED traffic light and no display, with an embodiment is completely feasible without signaling means.
- the first drive motor 3 of the first pump module 211 runs at a speed that is generated by the frequency converter on the basis of a speed output by the control module 202.
- the corresponding or underlying reference variable W is fed via the analog connection 216 into one of the analog inputs 214 of the first control module 202. This determines based on the reference variable W and taking into account an actual operating parameter, a manipulated variable, which is output via an analog output 217 and passed to the first frequency converter 4, which controls the first drive motor 3 according to the manipulated variable.
- All monitored system actual parameters, in particular a vibration signal determined by the first sensor module 212, which is supplied to the first control module 202 via the bus system 213 are below warning thresholds stored in a database of the logic of the first control module 202.
- a green LED 231 of the LED traffic light 206 lights up.
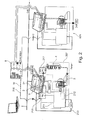
- Fig. 3 visualized scenario reaches an actual operating parameters, here the determined by means of the first sensor module 212 total vibration of the first pump module 211 a first, stored in the aforementioned database of the logic of the first control module 202 warning threshold, with the result that the first logic, the first signaling means 204 such controls that a yellow LED 232 of the first LED traffic light 206 is lit.
- a corresponding warning or information is displayed in the screen 205 of the signaling means 204.
- the software of the logic of the first control module 2 it is determined that when the first warning threshold is reached, the first pump module 211 is to be driven at a slower speed in order to maintain the permitted maximum vibration values.
- the logic of the first control module 202 determined in the sequence a corrected downward correcting variable, which then via the analog output 217 the first frequency converter 4 of the first drive module 207th is forwarded.
- a corresponding information is output to the control room via one of the digital outputs 219.
- the control room decides whether the speed setpoint of the control room determined by the actual process or the speed setpoint of the second control module 203 are routed to the frequency converter.
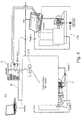
- FIG. 4 The scenario presented is a sequence of the previously described by Fig. 3 described scenarios.
- the cause of the increased vibration values has been eliminated.
- the debugger has been acknowledged at the first control module 202, causing the logic to illuminate the green LED 231 on the first control module 202.
- the logic of the second control module 203 in conjunction with the integrated PID controller of the second control module 203 is determined that now the first pump module 202, more precisely its upstream drive motor 3 can continue to operate with the predetermined speed from the control room.
- the error is reported by the logic via one of the digital outputs 219 to the control room and the over-tuning of the predetermined speed command signal from the control room is canceled.
- a sudden pressure increase on the pressure side is detected or measured via a pressure sensor module 233 and transmitted via an analog connection 234 to one of the analog inputs 214 of the second control module 203.
- the logic of the second control module 203 recognizes by database alignment exceeding an allowable limit (warning threshold) and causes the flashing of a red LED 235 on the second control module 203.
- a corresponding message is sent to the control room by the logic of the second control module 203 via a digital output 19.
- the drive motor 3 is turned off, so that the second pump module takes no damage.
- Via a digital output 221 the motor contactor is driven accordingly, with the result that the drive motor 208 turns off
- Fig. 6 to 8 various embodiments of Verdrängerpumpensystemen described, each having a control module, which is formed as a separate unit, and which is spaced from the drive module and housed in a separate housing.
- the mode of operation of the control module present as a control module will be explained in detail on the basis of the exemplary embodiments. This mode of operation of the control modules shown can also from the in the Fig. 1 to 5 be implemented control modules.
- a positive displacement pump system 1 schematically the construction of a positive displacement pump system 1 is shown.
- This comprises a in the embodiment shown as a single or multi-spindle pump, in particular three-spindle pump, trained positive displacement pump 2.
- the positive displacement pump 2 is operatively connected to a motor shaft of a trained as an electric motor displacement pump motor 3, which comprises a frequency converter 4, depending on a generated by a controller 6
- Manipulated variable Y S or a corrected manipulated variable Y ' S or possibly multiple times corrected manipulated variable Y' S controls the energization of the motor windings of the positive displacement pump motor 3 and / or regulates.
- Displacement pump motor and frequency converter form a drive module 207.
- a corrected manipulated variable Y ' S comprises the positive displacement pump 1, for example, formed by a microcontroller control means 5, comprising a previously mentioned controller 6 and logic means 7.
- the control means 5 are as separate from the drive module 207 control module 202 with its own Housing before.
- the control means 5 are preferably preceded by this separate suitss istnvorgabesch 8, for example, a process control, which provide the control means 5 with a reference variable W, for example, a nominal volume flow or a desired pressure representing electrical voltage signal.
- a reference variable W for example, a nominal volume flow or a desired pressure representing electrical voltage signal.
- the reference variable W and an externally supplied first actual operating parameter X are supplied to the controller 6, more precisely to a difference former 9 of the controller 6, which calculates the difference XW.
- the actual controller 6, which is designed, for example, as a PI or PID controller, thus determines a manipulated variable Y S on the basis of the reference variable W and the first actual operating parameter X measured here . This is not fed directly to the frequency converter 4 as in the prior art. but first passes through logic means 7.
- first comparison means 10 which compare the manipulated variable Y S generated by the controller 6 with at least a first limit, preferably a maximum to be observed first limit Y Grenzmax and / or a minimum to be observed limit Y Grenzmin .
- a comparison value standing in a functional relationship with the manipulated variable Y S can be calculated in the calculation thereof according to a (not) shown (optional) comparison value specification means on the basis of the manipulated variable Y s functional relationship and at least one actual operating parameters, for example, the first actual operating parameters X and at least one further, to be explained later further actual operating parameters can be incorporated.
- the comparison value specification means may, according to a functional relationship for calculating the comparison value, take into account at least one geometry parameter of the positive displacement pump and / or a delivery fluid parameter, which must then also be taken into account when taking into account the limit value.
- this additional comparison value calculation step is saved and the manipulated variable Y S is compared directly with at least one first limit value Y limit max and / or Y limit value, wherein the at least one first limit value represents a positive displacement pump protection limit whose exceeding or falling below a defect the positive displacement pump has or could have.
- the comparison means 10 is associated with a first functional unit 11, which includes first correction means 13 in addition to first limit value specification means 12.
- the functional unit 11 calculates the at least one first limit value Y Kirmax , Y Kirmin of the comparison means 10 is supplied in addition to the manipulated variable Y S generated by the controller 6.
- the comparison means now check whether the manipulated variable Y S falls below a maximum first limit value Y réellemax and / or whether the manipulated variable Y S has a minimum first value Limit Y exceeds limit.
- the manipulated variable Y S is a permissible control variable which does not endanger the positive-displacement pump, which can be supplied to further comparisons and correction routines, not shown, or as shown directly as input signal to the frequency converter 4 of the positive-displacement pump motor 3 on this basis controls.
- the first actual operating unit 11 is supplied with the first actual operating parameter X and another measured or calculated actual operating parameter Y H and / or X H , wherein the actual operating parameter Y H in the exemplary embodiment shown is an auxiliary manipulated variable of the frequency converter, for example, a rotational frequency setpoint or a torque setpoint of the frequency converter. These are not measured values, but based on at least one actual parameter, for example based on a current control measurement calculated by the frequency converter, in particular simulated values.
- the further actual operating parameter X H is an auxiliary control variable, for example an engine and / or positive displacement pump speed or a torque, which are preferably measured directly on the engine 3.
- an operating parameter for example the first actual operating parameter, here the actual value of the controlled variable from the process control path 14 is considered and at least one further actual operating parameter Y H , X H or a, preferably measured Hauptstellêt Y HH for the process control variable X, for example, a pressure or a flow.
- the first correction means 13 In the event that an exceeding of the maximum first limit value Y Grenzmax and / or a falling below the minimum first limit value Y Mariemin is detected by the comparison means, this is reported to the first function unit 11, the first correction means 13 then a corrected manipulated variable Y 'S determine taking into account the first actual operating parameter X and one of the aforementioned further actual operating parameters Y H , X H , Y HH .
- This corrected manipulated variable Y ' S can then, as shown, be fed to the comparison means as an input variable for comparison with a first limit value Y Grenzmax and / or Y Grenzmin or bypassing the Comparison means (not shown) a further comparison and correction procedure or directly the frequency converter 4 as an input signal.
- specific geometry parameters GP and / or conveying fluid parameters FP specific to the conveying fluid can be supplied to the first limiting value specification means 12 and / or the first correction means 13 for the positive displacement pump assigned to the control means 5, which, in the context of a functional relationship, find their way into the calculation of the first limit values Y limit max , Y limit min , and / or the corrected manipulated variable Y ' S.
- the corrected manipulated variable Y ' S is the maximum or minimum permissible first limit value Y réellemax , Y Kirmin , as close as possible to the manipulated variable Y S generated by the controller.
- the first limit value specification means 12 and the first correction means 13 include a common computer (computer means), since the corrected manipulated variable Y ' S in the embodiment shown corresponds to a first limit value Y limit max , Y limit min .
- the manipulated variable Y S generated by the controller is overwritten with the corrected manipulated variable Y ' S.
- the first correction means 13 and the first limit value specification means 12 can be realized completely separately, ie with separate calculation means, ie in separate functional units.
- the corrected manipulated variable Y ' S should correspond to a first limit value, in which case, as in Fig. 1 shown limit value setting means 12 and correction means 13 merge together, so have a common calculation routine.
- the first actual operating parameter X corresponds to the actual controlled variable, in the exemplary embodiment shown a pressure, measured in bar. It is assumed that the reference variable X is a pressure and is initially 20 bar. Likewise, the actual operating parameter X is measured as 20 bar.
- the controller 6 determines a new manipulated variable Y S , in this case a speed-proportional voltage value, which is significantly smaller than in a previous run or in a previous calculation.
- the first threshold value setting means 12 calculates a minimum allowable limit value Y limit min. This represents in the embodiment shown a minimum allowable speed. Maintaining a minimum permissible speed is desirable in order to avoid the risk of lubricant leakage when this minimum permissible speed is exceeded.
- Y Grenzmax corresponds to the minimum permissible limit value. This is a minimum permissible speed (n permissible ).
- the first actual operating parameter X is in this case the measured controlled variable, here the new actual pressure of 10 bar.
- the factor • ⁇ is a further operating parameters, namely a measure for the, in particular via a temperature measurement of the conveying fluid certain operating viscosity of the fluid or for the situation influence of viscosity on the maximum allowable pressure. This value is 10 0.32 for the particular medium in the embodiment shown.
- the constant k is the correction value for the lubricity of the medium, this is exemplified by 0.75 for the particular medium.
- the constant b is a correction value for the tribocharging capability of the pump casing. This is in the illustrated embodiment 1.
- the pump-specific characteristic c is a characteristic value for the radially loaded rotor diameter. This is for example in the embodiment shown 0.55.
- the minimum permissible limit value Y Grenzmin is supplied to the first comparison means 10 which compare the manipulated variable Y S determined by the controller 6 with this. Depending on the comparison, either the manipulated variable Y S determined by the controller is transmitted to the frequency converter or a corrected manipulated variable Y ' S is determined by the first correction means, which preferably corresponds to the previously calculated (or newly calculated) minimum permissible limit value Y limit min .
- the first actual operating parameter X corresponds to the actual controlled variable, here a pressure.
- An actual pressure of 20 bar is measured.
- the setpoint of the controlled variable i. the reference variable W from 20 to 30 bar.
- the disturbance variable there is a change in the disturbance variable. It is believed that the flow resistance increases due to a smaller flow area, i. a smaller fürström trimmessers, for example, as a result of a tool change.
- the aforementioned manipulated variable Ys is the minimum limit for refracting Y Kirmin (first threshold value) which represents the minimum allowable speed. The calculation is based on the functional relationship specified in the first embodiment.
- the first correction means 13 Since the manipulated variable Y S falls below the minimum permissible limit value Y limit value, ie the minimum permissible speed, the first correction means 13 output a corrected manipulated variable Y ' S , which is transmitted to the frequency converter instead of the manipulated variable Y S.
- the corrected manipulated variable Y ' S preferably corresponds to the calculated minimum permissible limit value Y limit min .
- the reference variable W is a volume flow measured in l / min.
- the first actual operating parameter X is a measured volume flow. It is assumed that the volumetric flow demand increases during operation. In the example shown, the reference value is to double, namely from 1500 l / min to 3000 l / min.
- the controller 6 determines a manipulated variable Y S , here a speed.
- This manipulated variable Y S ie the speed specified by the controller 6 is compared by the comparison means 10 with a maximum permissible speed, ie a first limit value Y Grenzmax . This maximum permissible speed is determined based on the NPSH available , ie based on the existing NPSH or the holding pressure level of the system.
- Fig. 4 In the diagram according to Fig. 4 is indicated on the left vertical axis of the NPSH in meters of water (mWs). On the right vertical axis, the speed is given in revolutions per minute. On the horizontal axis, the axial velocity of the fluid is given in m / s.
- the diagram refers to an exemplary pump with a size 20 and a lead angle of the spindle of 56 °.
- the linearly rising line characterizes the axial velocity v ax of the medium (delivery fluid) as a function of the rotational speed.
- the first limit value Y Stahlmax ie the maximum permissible rotational speed
- the diagram must move up to the linear line.
- the maximum permissible speed ie the first limit value Y Kirmax
- the reference variable ie the required volume flow doubles, which is 3000 l / min due to the linear relationship between a manipulated variable change from the assumed 1500 rpm. Since this manipulated variable Y S of 3000 1 / min is smaller than the first limit Y Grenzmax of about 3800 1 / min, the manipulated variable Y S can be transmitted to the frequency converter 4 as an input.
- the correction means 13 will correct the manipulated variable Y S given by the controller 6 by a corrected manipulated variable Y ' S , which corresponds to, for example, the first limit, ie 3800 1 / min in the present example.
- the embodiment according to Fig. 7 differs from the embodiment according to Fig. 6 merely in that the manipulated variable Y S generated by the controller 6 is not compared with at least one first limit value assuring or representing the positive displacement pump protection, but with at least one second limit value ensuring the delivery fluid quality. In the exemplary embodiment shown, this is a second limit value. Also at Fig. 7 The control means are present as separate from the drive module control module.
- the at least one second limit value Y Grenzmax , Y Grenzmin ensures compliance with the delivery fluid quality .
- a single, maximum second limit value Y limit-max is provided by second limit value specification means 15, wherein, alternatively, a plurality of second limit values, eg an additional one minimum limit Y limit min , which can be calculated to ensure the conveyed fluid quality .
- each second comparison means 16 determines whether the manipulated variable generated by the controller 6 Y S or a corrected already in a preceding, not included here further correction procedure manipulated variable exceeds the second threshold value Y réellemin by a certain amount. If the manipulated variable Y S is less than or equal to the maximum limit value, the manipulated variable Y S generated by the controller 6 or supplied to the comparison means 16 is made available (calculated) to the frequency converter 4.
- the second limit value specification means 15 take into account the first actual operating parameter X and at least one further (other) actual operating parameter, for example an auxiliary manipulated variable Y H , an auxiliary controlled variable X H and / or a skin manipulated variable YHH . It can also be realized that, in addition, geometry parameters GP of the displacement pump and / or delivery fluid parameters FP, as well as the vibration, are taken into account in the calculation.
- the fourth example concerns the protection of the medium, i.
- the second limit value is determined such that the manipulated variable does not result in a negative impairment of a quality parameter of the delivery fluid (delivery medium) conveyed by the positive displacement pump.
- the second limit value corresponds to a maximum permissible speed.
- the first operating parameter X is a volume flow of the process line.
- the determination of the second limit value includes functional conditions of the pump, ie speed ratios are taken into account, namely the angular velocity difference of the rotating positive displacement rotors (spindles) relative to the stationary pump housing.
- the velocity ratios in the columns are directly proportional to the pump speed and there is an inversely directly proportional relationship to the size of the function gap, ie the actual linear shear rate.
- This functional gap is dependent on pump-specific conditions, namely on the actual radial gap, ie on the firmly set pump rotor radial clearance and also on current operating conditions, namely the current pressure load of the delivery fluid, as well as the current viscosity of the delivery fluid.
- the latter two further actual operating parameters are measured and are taken into account in the calculation of the second limit value Y Grenzmax , ie in the calculation of the maximum permissible rotational speed.
- a delivery fluid having a dynamic viscosity ⁇ of 5 Pas is delivered.
- the maximum permissible speed therefore corresponds to the limit value Y réellemax.
- the embodiment according to Fig. 8 combines the embodiments according to the Fig. 6 and Fig. 7 ie, the control means 5 are designed in such a way that the manipulated variable Y S output by the controller 6 can be compared both with at least one first limit value (pump protection limit value) and with at least one second limit value (medium protection limit value).
- the control variable Y S generated by the controller 6 is first compared with a first and then with a second threshold, wherein the reverse arrangement is of course feasible, ie, that is compared first with a second and then with a first limit.
- the output value of the first comparison forms the input variable for the second comparison, wherein the output variable of the first comparison can be the uncorrected manipulated variable Y S , namely if there is no limit value overshoot or undershoot in the first comparison and Y s is thus not corrected or, alternatively, by a manipulated variable Y ' S corrected by the first comparison means 10.
- Y S or Y ' S are then the input variables for the second comparison means 16. If no correction is made here, the input value for the second comparison Y S or Y' S is sent to the frequency converter 4 or in the case of a correction the corrected manipulated variable Y " S.
- first and second decision-making means 20, 21 are provided in which it is determined whether a pump protection comparison or a medium protection comparison is to be carried out.
- the respective decision can for example be specified by software, so that the user alternatively only one Pump protection comparison or a medium protection comparison can realize, or both comparison operations.
- the manipulated variable is a speed signal for the pump, the pump speed being plotted in the diagram on the left vertical axis.
- the delivery pressure measured at the discharge nozzle of the pump, flows into the calculation of the first limit value, the delivery fluid pressure being plotted on the right vertical axis.
- the delivery fluid viscosity (medium viscosity) flows into the calculation of the first limit value as a further actual operating parameter, the medium viscosity being plotted on the horizontal lower axis.
- the delivery fluid volume flow or the pump speed or the delivery fluid pressure into consideration. In the specific embodiment, it is assumed that the delivery fluid pressure is the reference variable.
- the conveying fluid viscosity due to a corresponding medium change from 12mm 2 / s to 9 mm 2 / s, to 6 mm 2 / s, to 4 mm 2 / s and then (stepwise) up to 2mm 2 / s drops.
- the delivery fluid volume flow may fluctuate.
- the reference variable ie the process pressure (delivery fluid pressure) should initially be kept at 10bar, then 20bar, etc., ie incrementally by 10bar each up to a maximum of 50bar. In other words, the reference variable will gradually change from 10bar to 50bar.
- the controller outputs a manipulated variable (Y S ) as a function of the reference variable (W).
- the first limit value specification means calculate a first limit value, in the present case a minimum rotational speed Y limit min as a function of the first actual operating parameter, here the delivery fluid pressure and the further actual operating parameter, here the medium viscosity, wherein in the concrete exemplary embodiment the medium viscosity is determined indirectly via the delivery fluid temperature.
- the first limit value in the present case a minimum rotational speed Y limit min as a function of the first actual operating parameter, here the delivery fluid pressure and the further actual operating parameter, here the medium viscosity, wherein in the concrete exemplary embodiment the medium viscosity is determined indirectly via the delivery fluid temperature.
- the minimum speed would cause a defect state of the positive displacement pump.
- the comparison means compare in the specific embodiment of the controller predetermined manipulated variable, ie, a speed signal with the first limit value calculated by the first threshold value setting means. If the manipulated variable in the illustrated embodiment is above this first limit value, the manipulated variable is forwarded to the frequency converter as an input signal.
- a corrected manipulated variable is determined or determined as an input signal in the embodiment shown and passed on to the frequency converter as a corrected manipulated variable in the embodiment shown by the first correction means passing on the first limit value determined by the limit value specification means.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Computer Hardware Design (AREA)
- Control Of Positive-Displacement Pumps (AREA)
- Compressors, Vaccum Pumps And Other Relevant Systems (AREA)
- Details And Applications Of Rotary Liquid Pumps (AREA)
- Compressor (AREA)
Description
Die Erfindung betrifft ein Verdrängerpumpensystem mit einem Verdrängerpumpenmodul gemäß dem Oberbegriff des Patentanspruchs 1 (im Folgenden auch Pumpenmodul), welches bevorzugt als, insbesondere mehrspindlige, Schraubenspindelpumpe ausgebildet ist. Zusätzlich zu dem Pumpenmodul umfasst das Pumpensystem ein Antriebsmodul zum Antreiben des Pumpenmoduls, wobei das Antriebsmodul unabhängig von dem Pumpenmodul austauschbar ist, d.h. lösbar mit dem Pumpenmodul verbunden ist. Das Antriebsmodul umfasst neben einem elektrischen Antriebsmotor einen diesem zugeordneten Frequenzumrichter zum Regeln oder Stellen einer Antriebsmotordrehzahl. Ferner umfasst das Pumpensystem Steuermittel mit einer Logik und einem Regler zum Erzeugen einer Stellgröße in Abhängigkeit einer Führungsgröße und mindestens eines Ist-Betriebsparameters, wie beispielsweise eines Fluiddrucks und/oder eines Volumenstroms. Bevorzugt umfasst das Pumpen-System als Führungsgrößenvorgabemittel eine Leitwarte, also ein übergeordnetes Kontrollsystem. Zusätzlich oder alternativ zu einer Prozessleitwarte kann die Führungsgröße manuell, beispielsweise durch eine entsprechende Einstellung an den Steuermitteln vorgegeben und dann von den Steuermitteln selbst erzeugt und/oder von einer einfachen, von den Steuermitteln separaten Spannungsquelle erzeugt werden, die einen elektrischen Spannungswert als Führungsgröße ausgibt.The invention relates to a displacement pump system with a positive displacement pump module according to the preamble of patent claim 1 (hereinafter also referred to as pump module), which is preferably designed as a, in particular multi-spindle, screw pump. In addition to the pump module, the pump system includes a drive module for driving the pump module, the drive module being replaceable independently of the pump module, i. releasably connected to the pump module. The drive module comprises, in addition to an electric drive motor, a frequency converter assigned thereto for regulating or setting a drive motor rotational speed. Furthermore, the pump system comprises control means with a logic and a controller for generating a manipulated variable as a function of a reference variable and at least one actual operating parameter, such as a fluid pressure and / or a volumetric flow. Preferably, the pump system as Führungsgrößenvorgabemittel a control room, so a higher-level control system. In addition or as an alternative to a process control system, the reference variable can be preset manually, for example by a corresponding setting on the control means and then generated by the control means itself and / or by a simple voltage source separate from the control means and outputting an electrical voltage value as a reference variable.
Heutige Verdrängerpumpenmotoren zum Antreiben von Verdrängerpumpen umfassen ein Frequenzumrichter mit integriertem Regler, der in der Lage ist, das Eingangssignal, insbesondere ein Spannungssignal für den Frequenzumrichter in Abhängigkeit eines gemessenen Ist-Betriebsparameters und einer zu erreichenden Führungsgröße zu regeln. Dabei gibt der Regler die in Abhängigkeit der Führungsgröße ermittelte Stellgröße "kritiklos" an den Frequenzumrichter weiter. Problematisch dabei ist, dass der dem Frequenzumrichter zugeordnete Regler heute lediglich motorspezifisch ausgelegt ist, d.h. nicht hinsichtlich der eigentlichen bei Verdrängerpumpensystemen interessierenden Verdrängerpumpe optimiert ist. Dies kann bei Verdrängerpumpensystemen zu Problemen führen, da von Verdrängerpumpen grundsätzlich im Vergleich zu Kreiselpumpen eine erhöhte Gefährdung für die Pumpe selbst und/oder für weitere Prozessaggregate ausgeht. Dies ist auf das von Strömungsmaschinen unterschiedliche Kennlinienverhalten von Verdrängerpumpen zurückzuführen. Grundsätzlich kann dies auch im Extremfall zu einer vollständigen Selbstzerstörung oder nachhaltigen Störung der Verdrängerpumpe führen, insbesondere dann, wenn Schädigungsanzeichen nicht rechtzeitig erkannt werden.Today's displacement pump motors for driving positive displacement pumps include a frequency converter with integrated controller, which is able to control the input signal, in particular a voltage signal for the frequency converter in dependence on a measured actual operating parameter and a reference variable to be achieved. In this case, the controller transmits the manipulated variable determined as a function of the reference variable to the frequency inverter "without criticism". The problem with this is that the controller associated with the frequency converter is designed today only engine-specific, that is not optimized with respect to the actual interest in Verdrängerpumpensystemen positive displacement pump. This can lead to problems with positive displacement pump systems, since positive displacement pumps in principle pose an increased risk for the pump itself and / or for further process units compared to centrifugal pumps. This is due to the characteristic behavior different from turbomachines attributed by positive displacement pumps. In principle, even in extreme cases, this can lead to complete self-destruction or sustained disruption of the positive-displacement pump, especially if signs of damage are not detected in time.
Auch wird der Einfluss des unmittelbar aus der Führungsgröße (Sollvorgabe) resultierenden Stellgrößensignals auf die Qualität des Förderfluids bei bekannten Verdrängerpumpen nicht berücksichtigt.Also, the influence of the directly resulting from the reference variable (target specification) manipulated variable signal on the quality of the delivery fluid in known positive displacement pumps is not considered.
Darüber hinaus ist bei bekannten Pumpen-System nachteilig, dass eine auf dem jeweiligen, den Frequenzumrichter umfassenden, elektrischen Antriebsmotor eine spezifische Programmierung der Logik der Steuermittel erfolgen muss, welche im Hinblick auf optimierte Eigenschaften des Pumpenmoduls immer nur einen Kompromiss darstellt. Bei bekannten Pumpen-Systemen ist es immer nur möglich, das Antriebsmodul unabhängig von dem Pumpenmodul auszutauschen - ein Austausch der Steuermittel ist durch deren Integration im Frequenzumrichter des Elektromotors nicht möglich.In addition, it is disadvantageous in known pump system that on the respective, the frequency converter comprehensive, electric drive motor must be made a specific programming of the logic of the control means, which always represents only a compromise in terms of optimized properties of the pump module. In known pump systems, it is always possible to replace the drive module independently of the pump module - a replacement of the control means is not possible by their integration in the frequency converter of the electric motor.
Das Dokument
Ausgehend von dem vorgenannten Stand der Technik liegt der Erfindung die Aufgabe zugrunde, ein Pumpen-System anzugeben, das eine erhöhte Sicherheit für weitere Prozessaggregate und für das Pumpenmodul selbst garantiert. Darüber hinaus soll die Variabilität für den Endkunden erhöht werden und eine im Hinblick auf eine optimale Funktionalität und Langlebigkeit des Pumpenmoduls optimierte Drehzahlregelung möglich sein.Based on the aforementioned prior art, the present invention seeks to provide a pump system that guarantees increased safety for other process units and for the pump module itself. In addition, the variability for the end customer should be increased and an optimized in terms of optimum functionality and longevity of the pump module speed control should be possible.
Diese Aufgabe wird hinsichtlich des Pumpen-Systems mit den Merkmalen des Anspruchs 1 gelöst. Vorteilhafte Weiterbildungen der Erfindung sind in den Unteransprüchen angegeben. In den Rahmen der Erfindung fallen sämtliche Kombinationen aus zumindest zwei von in der Beschreibung, den Ansprüchen und/oder den Figuren offenbarten Merkmalen. Zur Vermeidung von Wiederholungen sollen vorrichtungsgemäß offenbarte Merkmale als verfahrensgemäß offenbart gelten und beanspruchbar sein. Ebenso sollen verfahrensgemäß offenbarte Merkmale als vorrichtungsgemäß offenbart gelten und beanspruchbar sein.This object is achieved in terms of the pump system with the features of
Der Erfindung liegt der Gedanke zugrunde, die bisher dem Frequenzumrichter integralen Steuermittel von diesem zu separieren, um ein von dem Antriebsmodul separates, d.h. eigenständiges Steuermodul zu erhalten, in welchem die Logikmittel, ggf. mit Datenbank und dem, bevorzugt als PI- oder PID-Regler ausgeführten, Regler vorgesehen ist, um somit unabhängig von dem Frequenzumrichter in Abhängigkeit einer Führungsgröße und mindestens eines Ist-Betriebsparameters (Ist-Systemparameter) ein Eingangssignal (Stellgröße) für den Frequenzumrichter bereitstellen zu können, welches dann von dem Antriebsmodul, genauer von dessen Frequenzumrichter durch eine entsprechende Wicklungsbestromung in eine Motordrehzahl umgesetzt wird. Durch die Erfindung ist es erstmals möglich, das Antriebsmodul auf einfache Weise unabhängig von den Steuermitteln zum Erzeugen des Drehzahlsollsignals austauschen bzw. frei wählen zu können. Die Erfindung ermöglicht es zudem sehr einfach aufgebaute Frequenzumrichter einzusetzen, die im einfachsten Falle als Steller wirken, die das von dem separaten Steuermodul vorgegebene Drehzahlsollsignal am beispielsweise als Asynchronmotor ausgebildeten Motor durch entsprechende Strombeeinflussung einstellen. Selbstverständlich ist es auch möglich, bisher zum Einsatz kommende "intelligente" Frequenzumrichter einzusetzen, wobei diese jedoch dann vorzugsweise nicht in der bisherigen Art und Weise genutzt, d.h. angesteuert werden. Ein etwaiger enthaltener PI- oder PID-Regler des Frequenzumrichters wird also vorzugsweise nicht mit einem Drucksensorsignal und nicht mit einem Durchflussmengensignal und nicht einem Vibrationssensorsignal und nicht mit einem Temperatursensorsignal und auch nicht mit einem Drehmomentsensorsignal beaufschlagt, mit dem Ziel auf dieser Eingangsbasis eine Stellgröße, insbesondere in Form eines Drehzahlsollsignals zu generieren - vielmehr wird diese Stellgröße von dem separaten Steuermodul erhalten und vom Frequenzumrichter in an sich bekannter Weise in eine Motordrehzahl umgesetzt.The invention is based on the idea of separating the control means previously integral with the frequency converter, in order to separate a control module which is separate from the drive module, i. to obtain independent control module, in which the logic means, possibly with database and, preferably designed as a PI or PID controller, controller is provided, thus independent of the frequency in dependence of a reference variable and at least one actual operating parameter (actual System parameter) to provide an input signal (manipulated variable) for the frequency converter, which is then converted by the drive module, more precisely by the frequency converter by a corresponding Wicklungsbestromung in an engine speed. By means of the invention, it is possible for the first time to be able to exchange or freely select the drive module independently of the control means for generating the desired speed signal. The invention also makes it possible to use very simply constructed frequency converter, which act in the simplest case as a controller that set the predetermined speed of the separate control module speed command, for example, designed as an asynchronous motor by appropriate current influencing. Of course, it is also possible to use previously used "intelligent" frequency converter, but this is then preferably not used in the previous manner, i. be controlled. A possibly contained PI or PID controller of the frequency converter is therefore preferably not supplied with a pressure sensor signal and not with a flow rate signal and not a vibration sensor signal and not with a temperature sensor signal and not with a torque sensor signal, with the aim on this input base a manipulated variable, in particular to generate in the form of a speed command signal - but this control variable is obtained from the separate control module and implemented by the frequency converter in a conventional manner in an engine speed.
Neben der vereinfachten Austauschbarkeit des Antriebsmodul unabhängig von der eigentlichen Steuerung (Steuermittel bzw. Steuermodul) zur Erzeugung des vom Frequenzumrichter umzusetzenden Stellgröße (ggf. eine später noch zu erläuternde korrigierte Stellgröße), hat das nach dem Konzept der Erfindung ausgebildete Verdrängerpumpensystem weitere wesentliche Vorteile. So ist es erstmals möglich, eine gezielt auf das Pumpenmodul hin optimierte Logik (Logikmittel) mit geeigneter pumpenmodulspezifischer Software sowie einen für den eigentlichen Pumpenprozess optimierten Regler, vorzugsweise einen optimal ausgewählten PI- oder PID-Regler, einzusetzen. Bevorzugt ist der, insbesondere einen Mikrocontroller umfassenden, Logik eine Software zugeordnet, die speziell auf das eingesetzte Pumpenmodul abgestimmt ist, so dass der eigentliche Antriebsmotor unabhängig vom Pumpenmodul und von dem Steuermodul ausgetauscht werden kann, ohne die Konfiguration des Pumpenmoduls über das Steuermodul zu beeinflussen. Alternativ ist es denkbar, für unterschiedliche Pumpenmodule unterschiedliche Software vorzusehen, oder eine umfassende Software, in welcher das jeweils eingesetzte Pumpenmodul, bevorzugt aber eine geeignete Menüsteuerung, ausgewählt werden kann. Eine spezifische Anpassung des Steuermoduls an das jeweils zum Einsatz kommende Pumpenmodul, d.h. eine hardwaremäßige Veränderung ist nicht notwendig.In addition to the simplified interchangeability of the drive module independent of the actual control (control means or control module) for generating the variable to be converted by the variable manipulated variable (possibly a later yet to be explained corrected manipulated variable), formed according to the concept of the invention Verdrängerpumpensystem further significant advantages. It is thus possible for the first time to use a logic (logic means) optimized specifically for the pump module with suitable pump module-specific software and a controller optimized for the actual pump process, preferably an optimally selected PI or PID controller. Prefers is the, in particular a microcontroller comprehensive logic associated software that is specially adapted to the pump module used, so that the actual drive motor can be replaced independently of the pump module and the control module, without affecting the configuration of the pump module via the control module. Alternatively, it is conceivable to provide different software for different pump modules, or comprehensive software in which the pump module used in each case, but preferably a suitable menu control, can be selected. A specific adaptation of the control module to the respectively used pump module, ie a hardware modification is not necessary.
Das Steuermodul bietet erstmalig die Möglichkeit, unabhängig von der Ausgestaltung des Antriebsmodul das Pumpenmodul, bei Bedarf auch unabhängig von einer etwaigen Leitwarte zu überwachen und per Drehzahlregelung zu regeln, wobei die Logik bevorzugt ausgebildet ist, um unzulässige Betriebsbedingungen (unzulässige Systemistparameter) zu erkennen und das Pumpenmodul ggf. durch Anpassung der vom Frequenzumrichter einzustellenden Solldrehzahl in einen sicheren Betriebspunkt durch Reduzierung der Solldrehzahl als Eingangssignal für den Frequenzumrichter zurückzufahren.Regardless of the design of the drive module, the control module for the first time offers the possibility of monitoring the pump module independently of any control room and regulating it by means of speed control, wherein the logic is preferably designed to detect impermissible operating conditions (impermissible system actual parameters) and If necessary, reduce the pump module by adapting the setpoint speed to be set by the frequency inverter to a safe operating point by reducing the setpoint speed as the input signal for the frequency inverter.
Bevorzugt ist die Logik derart ausgebildet, dass in diese beim Erkennen eines kritischen Systemistparameters (insbesondere durch Vergleich mit in dieser Datenbank abgelegten Grenzwerten) entweder eine, insbesondere in einer Datenbank abgelegte, sichere, bevorzugt eine (weitere) Schädigung des Pumpenmoduls verhindernde, Solldrehzahl bzw. Stellgröße vorgibt oder einen angepassten Systemsollparameter aufgrund dessen der integrale Regler des Steuermoduls eine, bevorzugt niedrigere, Solldrehzahl als Stellgröße ausgibt. Die von der Logik vorgegebene Solldrehzahl kann im Extremfall null sein, ist jedoch bevorzugt in einem Drehzahlbereich größer als null angesiedelt, damit der eigentliche Prozess trotz kritischer Systemistparameter weiterlaufen kann. Durch den Einsatz des nach dem Konzept der Erfindung ausgebildeten Steuermoduls kann ein plötzlicher Totalausfall mit Folgeschäden und einem ggf. resultierenden Produktionsausfall bzw. Betriebsausfall minimiert werden.Preferably, the logic is designed in such a way that upon detection of a critical system actual parameter (in particular by comparison with limit values stored in this database) either one, in particular stored in a database, safe, preferably a (further) damage to the pump module preventing setpoint speed or Assigns manipulated variable or an adjusted system setpoint parameters due to which the integral controller of the control module outputs a, preferably lower, setpoint speed as a manipulated variable. The setpoint speed specified by the logic can in extreme cases be zero, but is preferably located in a speed range greater than zero, so that the actual process can continue despite critical system actual parameters. By using the control module designed according to the concept of the invention, a sudden total failure with consequential damage and possibly resulting production failure or operational failure can be minimized.
In Weiterbildung der Erfindung sind mit Vorteil als Führungsgrößenvorgabemittel eine dem Steuermodul übergeordnete Kontrollinstanz (Leitwarte) vorgesehen, mit der eine aufgrund eines Ist-Betriebsparameters vom Steuermodul vorgegebene Stellgröße (oder eine später noch zu erläuternde korrigierte Stellgröße) überstimmbar ist, beispielsweise um den Prozess als solches nicht zu gefährden. Anders ausgedrückt kann die Leitwarte bevorzugt eine andere als die von dem Steuermodul vorgegebene Stellgröße, insbesondere eine Drehzahlvorgabe vorgeben, die dann von dem Frequenzumrichter in eine Drehzahl des Antriebsmoduls umgesetzt wird. In diesem Fall erfolgt bevorzugt die Regelung des Drehzahlsollsignals nicht im Steuermodul, sondern in der Leitwarte. Auch ist es denkbar, dass das Steuermodul von der Leitwarte als Hilfsregler benutzt wird, dergestalt, dass der einzuregelnde Systemsollparameter von der Leitwarte bestimmt wird, also ein von dem Steuermodul vorgesehener Systemsollparameter überstimmt wird, insbesondere um somit negative Auswirkungen auf den eigentlichen Prozess, in den das Pumpenmodul eingebunden ist, nicht zu gefährden.In a further development of the invention, a control module higher-level control (control room) are provided with advantage as Führungsgrößenvorgabemittel, with the one due to an actual operating parameter predetermined by the control module manipulated variable (or a later to be explained corrected manipulated variable) is over-tunable, for example, not to endanger the process as such. In other words, the control room can preferably specify a control variable other than that specified by the control module, in particular a speed specification, which is then converted by the frequency converter into a rotational speed of the drive module. In this case, preferably the regulation of the speed setpoint signal is not carried out in the control module, but in the control room. It is also conceivable that the control module is used by the control room as an auxiliary controller, such that the system nominal parameter to be adjusted is determined by the control room, ie a system nominal parameter provided by the control module is overruled, in particular to have negative effects on the actual process in which The pump module is integrated, not to endanger.
Bevorzugt ist die Leitwarte und/oder das Steuermodul zur Ausgabe eines Start- und/oder Stoppsignals für den Motor des Antriebsmoduls ausgebildet.Preferably, the control room and / or the control module is designed to output a start and / or stop signal for the motor of the drive module.
Grundsätzlich ist das Steuermodul bzw. dessen Intelligenz (Logik) bevorzugt derart konfiguriert, dass als Hauptziel verfolgt wird, eine Langlebigkeit des Pumpenmoduls zu gewährleisten bzw. nachhaltige Schäden von dieser abzuwenden. Dies ist mit Vorteil derart realisiert, dass, falls ein kritischer Ist-Betriebsparameter gemessen und von der Logik die Stellgrößen als kritisch erkannt wurde, entweder von dieser eine Solldrehzahl vorgegeben und vom Antriebsmodul umgesetzt wird, oder von der Logik der Systemsollparameter beeinflusst wird, mit dem Ziel, dass durch dessen Änderung der Regler des Steuermoduls eine niedrigere Solldrehzahl einregelt. Es kann jedoch notwendig sein, sich über die entsprechenden "Vorschläge" des Steuermoduls hinwegzusetzen und unter bewusster Riskierung eines Schaden des Pumpenmoduls den Prozess als solches nicht zu gefährden oder zumindest noch eine zeitlang aufrecht zu erhalten. Diese Kontrollaufgabe wird dann von der Leitwarte übernommen, die von Fall zu Fall bzw. unter vorbestimmten Bedingungen das Steuermodul überstimmen kann, beispielsweise dergestalt, dass anstelle einer von der Logik des Steuermoduls vorgesehenen Solldrehzahl unmittelbar ein von der Leitwarte vorgegebenes Stellgröße, insbesondere Solldrehzahlsignal an den Frequenzumrichter des Antriebsmoduls geleitet wird (wobei die Regelung dieses Signals bevorzugt von der Leitwarte übernommen wird) und/oder dadurch, dass anstelle eines von der Logik des Steuermoduls in Abhängigkeit eines gemessenen Systemistparameters eigentlich vorgesehenen Stellgrößen eine andere (korrigierte) Stellgröße von der Leitwarte vorgegeben wird, als Eingangswert für den Regler des Steuermoduls.In principle, the control module or its intelligence (logic) is preferably configured in such a way that the main aim is to ensure a long service life of the pump module or to prevent lasting damage from this. This is realized with advantage in such a way that, if a critical actual operating parameter was measured and the manipulated variables were recognized as critical by the logic, this is either dictated by this one setpoint speed and converted by the drive module, or influenced by the logic of the system setpoint parameter The goal is that by modifying the controller of the control module regulates a lower target speed. However, it may be necessary to override the appropriate "suggestions" of the control module and, consciously risking damage to the pump module, not jeopardize the process as such or at least maintain it for some time. This control task is then taken over by the control room, which can override the control module from case to case or under predetermined conditions, for example such that instead of a provided by the logic of the control module target speed directly from the control room predetermined manipulated variable, in particular target speed signal to the frequency the drive module is passed (the control of this signal is preferably taken over by the control room) and / or in that instead of one of the logic of the control module in dependence If a measured system actual parameter is actually provided, another (corrected) manipulated variable is specified by the control room as the input value for the controller of the control module.
Ganz besonders bevorzugt ist es, wenn das Steuermodul räumlich getrennt von der Antriebseinheit in einem von der Antriebseinheit und/oder dem Frequenzumrichter separaten Steuermodulgehäuse angeordnet ist, vorzugsweise in einem Mindestabstand von 0,5m, vorzugsweise von 1 m oder mehr. Bevorzugt ist dem Steuermodulgehäuse mindestens ein, bevorzugt digitaler, Signaleingang zum Empfangen des Ist-Betriebsparameters, beispielsweise von einem Sensormodul und/oder von einer fakultativ vorgesehenen Leitwarte zugeordnet. Zusätzlich oder alternativ ist dem Steuermodulgehäuse ein, insbesondere analoger, Signaleingang zum Empfangen eines Ist-Betriebsparameters und/oder einer Führungsgröße von der Leitwarte zugeordnet. Bevorzugt ist dem Gehäuse auch ein Stellgrößenausgangssignalausgang, insbesondere ein Drehzahlsollsignalausgang zugeordnet über den die von dem Regler des Steuermoduls erzeugte Stellgröße (ggf. eine korrigierte Stellgröße) in Richtung Frequenzumrichter der Antriebseinheit und/oder ein von der Leitwarte vorgegebenes, insbesondere geregeltes, Drehzahlsollsignal in Richtung bzw. für die Antriebseinheit ausgebbar ist.It is very particularly preferred if the control module is arranged spatially separated from the drive unit in a separate control module housing from the drive unit and / or the frequency converter, preferably at a minimum distance of 0.5 m, preferably 1 m or more. The control module housing is preferably assigned at least one, preferably digital, signal input for receiving the actual operating parameter, for example from a sensor module and / or from an optionally provided control room. Additionally or alternatively, the control module housing is assigned a, in particular analog, signal input for receiving an actual operating parameter and / or a command variable from the control room. Preferably, the housing is also assigned a manipulated variable output signal output, in particular a speed setpoint signal output via which the manipulated variable generated by the controller of the control module (possibly a corrected manipulated variable) in the direction of the frequency converter of the drive unit and / or a speed setpoint signal in the direction or respectively predetermined by the control room . Can be output for the drive unit.
In Weiterbildung der Erfindung ist mit Vorteil vorgesehen, die vom Regler in Abhängigkeit einer Führungsgröße, beispielsweise einem Sollvolumenstrom oder einem Solldruck des Förderfluids generierte Stellgröße, bevorzugt ein Spannungssignal nicht unmittelbar, d.h. kritiklos bzw. ohne Plausibilisierung, d.h. Überprüfung als Eingangssignal an den Frequenzumrichter weiterzugeben, sondern die Stellgröße, oder eine später noch zu erläuternde von ggf. zusätzlich vorgesehenen, insbesondere zweiten, Korrekturmitteln erhaltene, korrigierte Stellgröße oder gemäß einem funktionalen Zusammenhang aus der Stellgröße oder der korrigierten Stellgröße ermittelten Vergleichswert mit mindestens einem ersten Grenzwert (Pumpenschutzgrenzwert) zu vergleichen, wobei der mindestens eine erste Grenzwert ein Gefährdungspotenzial für die Verdrängerpumpe und/oder ein weiteres Prozessaggregat widerspiegelt. Anders ausgedrückt hätte ein Über- bzw. Unterschreiten des ersten Grenzwertes (mit einer definierten Wahrscheinlichkeit) einen vorbestimmten Defektzustand der Verdrängerpumpe zur Folge. Vorteilhaft ist es dabei, wenn es sich bei dem ersten Grenzwert nicht um einen statischen, d.h. fest vorgegebenen bzw. festgelegten Grenzwert handelt (wobei selbstverständlich zusätzlich auch ein Vergleich mit derartigen festen Grenzwerten durchgeführt werden kann), sondern um einen dynamisch bestimmten Grenzwert, der auf Basis eines Ist-Betriebsparameters errechnet wird. Anders ausgedrückt wird der Grenzwert in Abhängigkeit mehrerer Ist-Betriebsparameter aktuell berechnet, wobei es sich bei diesen Ist-Betriebsparametern um den ersten Ist-Betriebsparameter, also eine Ist-Regelgröße aus der Regelstrecke handeln kann, auf deren Basis der Regler die Stellgröße ermittelt und um mindestens einen weiteren, d.h. einen anderen Ist-Betriebsparameter, der entweder unmittelbar mittels eines Sensors gemessen oder auf Basis eines Ist-Wertes berechnet, insbesondere simuliert wird. Noch anders ausgedrückt besteht der Vorteil der Erfindung darin, dass nicht nur mit statischen Grenzwerten gearbeitet wird, sondern gemäß der Erfindung Berücksichtigung findet, dass die Grenzwerte einer Dynamik unterliegen, d.h. sich im Betrieb der Verdrängerpumpe in Abhängigkeit von sich ändernden Ist-Betriebsparametern ändern können. Für den Fall, dass der so ermittelte erste (Pumpenschutz-)Grenzwert um ein bestimmtes Maß über- bzw. unterschritten wird, wird mit Hilfe von ersten Korrekturmitteln eine korrigierte Stellgröße bereitgestellt, mit der vorzugsweise die vom Regler erzeugte Stellgröße oder eine bereits zuvor korrigierte Stellgröße, die beispielsweise von zweiten Korrekturmitteln erzeugt wurde, überschrieben wird. Besonders zweckmäßig ist es, wenn die korrigierte Stellgröße den maximal oder minimal zulässigen Wert annimmt, also bevorzugt einen ersten, aktuell berechneten Grenzwert, um der Führungsgröße oder genauer der aus der Führungsgröße unmittelbar resultierenden Stellgröße möglichst nahe zu kommen. Anders ausgedrückt handelt es sich bei der korrigierten Stellgröße um eine auf einen ersten Grenzwert gedeckelte Größe (bevorzugt ein entsprechend begrenztes Spannungssignal).In a further development of the invention is advantageously provided by the controller in response to a command variable, for example, a desired volume flow or a desired pressure of the fluid generated control variable, preferably a voltage signal not directly, ie uncritically or without plausibility, ie review as an input signal to the frequency converter, but the manipulated variable, or a later to be explained by possibly additionally provided, in particular second, correction means obtained corrected manipulated variable or according to a functional relationship from the manipulated variable or the corrected manipulated variable determined comparison value with at least a first limit (pump protection limit) to compare the at least one first limit value reflects a risk potential for the positive displacement pump and / or another process unit. In other words, exceeding or falling below the first limit value (with a defined probability) would result in a predetermined defect state of the positive displacement pump. It is advantageous in this case if the first limit value is not a static limit value, ie a fixed or fixed limit value (which of course additionally a comparison can also be made with such fixed limit values), but a dynamically determined limit value, which is calculated on the basis of an actual operating parameter. In other words, the limit value is currently calculated as a function of a plurality of actual operating parameters, wherein these actual operating parameters may be the first actual operating parameter, ie an actual controlled variable from the controlled system, on the basis of which the controller determines and corrects the manipulated variable at least one further, ie another actual operating parameter, which is either measured directly by means of a sensor or calculated on the basis of an actual value, in particular simulated. Stated another way, the advantage of the invention is that it not only works with static limits, but according to the invention takes into account that the limits are subject to dynamics, ie can change in operation of the positive displacement pump in response to changing actual operating parameters. In the event that the thus determined first (pump protection) limit value is exceeded or fallen below by a certain amount, a corrected manipulated variable is provided with the aid of first correction means, with which preferably the manipulated variable generated by the controller or an already previously corrected manipulated variable that has been generated, for example, by second correction means is overwritten. It is particularly expedient if the corrected manipulated variable assumes the maximum or minimum permissible value, that is to say preferably a first, currently calculated limit value in order to come as close as possible to the reference variable or more precisely the manipulated variable directly resulting from the reference variable. In other words, the corrected manipulated variable is a quantity covered by a first limit value (preferably a correspondingly limited voltage signal).
Zusätzlich zu dem Vergleich der Stellgröße, einer korrigierten Stellgröße, oder eines aktuell ermittelten Vergleichswertes mit einem ersten, den Verdrängerpumpenschutz sicherstellenden Grenzwert kann die vom Regler in Abhängigkeit der Führungsgröße ermittelte Stellgröße oder eine korrigierte Stellgröße, (beispielsweise eine von ersten Korrekturmitteln erhaltenen korrigierte Stellgröße, insbesondere die von den ersten Korrekturmitteln ausgegebene korrigierte Stellgröße oder ein aktuell berechneter Vergleichswert mit mindestens einem zweiten Grenzwert (Förderfluidschutz-Grenzwert) verglichen werden, dessen Einhaltung bzw. Nicht-Über- bzw. Unterschreiten die Qualität des Förderfluids sichern soll. Anders ausgedrückt würde ein Über- bzw. Unterschreiten des zweiten Grenzwertes (mit einer definierten Wahrscheinlichkeit) einen vorbestimmten Qualitätsparameter des mit der Verdrängerpumpe geförderten Fluids beeinträchtigen. Wird nun von Vergleichsmitteln ein Über- bzw. Unterschreiten (je nachdem, ob es sich um einen maximalen oder minimalen Grenzwert handelt) des mindestens einen zweiten Grenzwertes um ein vorbestimmtes Maß festgestellt, so wird von zweiten Korrekturmitteln eine korrigierte Stellgröße ausgegeben, die bevorzugt entweder direkt oder indirekt in Form eines Vergleichswertes dem Vergleich mit dem mindestens einen ersten Grenzwert oder als Eingangsgröße (Sollvorgabe) an den Frequenzumrichter weitergegeben wird. Bevorzugt wird die vom Regler erzeugte Stellgröße oder die von vorgelagerten weiteren, beispielsweise den ersten Korrekturmitteln erhaltene Stellgröße mit der korrigierten Stellgröße der zweiten Korrekturmittel überschrieben.In addition to the comparison of the manipulated variable, a corrected manipulated variable, or a currently determined comparison value with a first, the Verdoller pump protection ensuring limit can be determined by the controller in response to the command variable manipulated variable or a corrected manipulated variable, (for example, a correcting variable received from first correction means, in particular the corrected correcting variable output by the first correcting means or a currently calculated comparative value are compared with at least one second limiting value (conveying fluid protection limit value) whose adherence or not exceeding is to ensure the quality of the conveying fluid. or falling below the second limit (with a defined probability) a predetermined Affect the quality parameters of the pumped with the positive displacement fluid. If comparisons are used to determine that the at least one second limit value has exceeded or fallen below by a predetermined amount (depending on whether it is a maximum or minimum limit value), a corrected manipulated variable is output by second correction means, which is preferably either directly or indirectly in the form of a comparison value to the comparison with the at least one first limit value or as an input variable (target specification) is passed to the frequency converter. The manipulated variable generated by the controller or the manipulated variable obtained from upstream further, for example, the first correction means, is preferably overwritten by the corrected manipulated variable of the second correction means.
Wesentlich ist hierbei auch, dass es sich bei dem zweiten Grenzwert nicht um einen fest vorgegebenen, abgelegten Grenzwert handelt, sondern um einen auf Basis mehrerer aktueller Ist-Betriebsparameter berechneten zweiten Grenzwert, wobei es sich bei den in die Berechnung einfließenden Ist-Betriebsparameter um den ersten Ist-Betriebsparameter, insbesondere eine Ist-Regelgröße handelt und zusätzlich um einen anderen (weiteren) gemessenen Ist-Betriebsparameter oder um einen, insbesondere auf Basis eines Ist-Wertes, berechneten Ist-Betriebsparameter. Selbstverständlich kann zusätzlich ein Vergleich einer Stellgröße, einer korrigierten Stellgröße, eines Vergleichswertes und/oder eines Ist-Betriebsparameters mit einem festen Förderfluid-Grenzwert durchgeführt und bei Über- bzw. Unterschreiten eine Korrektur der Stellgröße oder der korrigierten Stellgröße durchgeführt werden.It is also essential here that the second limit value is not a fixed, stored limit value, but rather a second limit value calculated on the basis of a plurality of current actual operating parameters, wherein the actual operating parameters used in the calculation are the first actual operating parameter, in particular an actual control variable, and additionally a different (further) measured actual operating parameter or an actual operating parameter calculated, in particular based on an actual value. Of course, in addition a comparison of a manipulated variable, a corrected manipulated variable, a comparison value and / or an actual operating parameter can be performed with a fixed delivery fluid limit and in case of exceeding or falling below a correction of the manipulated variable or the corrected manipulated variable can be performed.
Wie bereits angedeutet liegt es im Rahmen der Erfindung eine Stellgröße, eine korrigierte Stellgröße oder einen Vergleichswert entweder nur gegen mindestens einen ersten (Pumpenschutz-)Grenzwert abzugleichen oder nur gegen einen zweiten (Förderfluidschutz-)Grenzwert oder alternativ gegen sowohl mindestens einen ersten (Pumpenschutz-)Grenzwert und zusätzlich gegen mindestens einen zweiten (Förderfluidschutz-)Grenzwert, wobei wiederum alternativ zuerst gegen mindestens einen ersten Grenzwert und dann nachfolgend gegen mindestens einen zweiten Grenzwert verglichen werden kann, oder umgekehrt zunächst gegen einen zweiten Grenzwert und nachfolgend gegen einen ersten Grenzwert.As already indicated, it is within the scope of the invention to adjust a manipulated variable, a corrected manipulated variable or a comparison value either against at least one first (pump protection) limit value or only against a second (conveying fluid protection) limit value or alternatively against both at least one first (pump protection) limit value. ) Limit value and additionally against at least a second (Förderfluidschutz-) limit value, which in turn alternatively first against at least a first threshold and then subsequently against at least a second threshold can be compared, or conversely first against a second threshold and subsequently against a first threshold.
Wesentlich ist es also dem Regler zur Erzeugung einer Stellgröße eine Logik (Logikmittel) zuzuordnen, die dafür Sorge trägt, dass das Reglerausgangssignal (Stellgröße) zunächst mit mindestens einem ersten und/oder mindestens einem zweiten Grenzwert (Pumpenschutzgrenzwert und/oder Förderfluidschutz-Grenzwert) verglichen wird, wobei der mindestens eine erste und der mindestens eine zweite Grenzwert aktuell, d.h. unter Berücksichtigung eines gemessenen oder berechneten Ist-Betriebsparameters berechnet wird und dass, für den Fall, dass ein Über- bzw. Unterschreiten des mindestens einen ersten Grenzwertes und/oder des mindestens einen zweiten Grenzwertes festgestellt wird, eine korrigierte Stellgröße erzeugt und dann diese anstelle der vom Regler ursprünglich erzeugten Stellgröße oder anstelle einer bereits zuvor korrigierten Stellgröße als Eingangssignal an den Frequenzumrichter (Frequenzumformer) weitergegeben wird, welcher auf Basis dieser Sollvorgabe den Verdrängerpumpenmotor bestromt.It is therefore essential to assign to the controller for generating a manipulated variable a logic (logic means), which ensures that the controller output signal (control variable) initially compared with at least a first and / or at least a second limit (pump protection limit and / or Förderfluidschutz limit) is, wherein the at least one first and the at least one second threshold current, ie is calculated taking into account a measured or calculated actual operating parameter and that, in the event that an above or below the at least one first limit value and / or the at least one second limit value is determined, generates a corrected manipulated variable and then this instead of the from the controller originally generated manipulated variable or instead of an already previously corrected manipulated variable as an input signal to the frequency converter (frequency converter) is passed, which energizes the positive displacement motor based on this target specification.
Grundsätzlich ist es möglich, die Logikmittel hardwaremäßig getrennt von dem Regler auszuführen, beispielsweise in Form eines von dem Regler getrennten Mikrokontrollers. Bevorzugt ist eine Ausführungsform, bei der Regler und die Steuermittel von einem gemeinsamen Mikrokontroller realisiert sind bzw. einen gemeinsamen Mikrokontroller umfassen.In principle, it is possible to execute the logic means in hardware separately from the controller, for example in the form of a microcontroller separate from the controller. Preferred is an embodiment in which the controller and the control means are realized by a common microcontroller or comprise a common microcontroller.
Wie später noch erläutert werden wird, ist es besonders bevorzugt, wenn in die Berechnung des mindestens einen ersten Grenzwertes und/oder des mindestens einen zweiten Grenzwertes verdrängerpumpenspezifische Parameter, insbesondere Geometrieparameter, wie ein Spaltmaß, und/oder ein Spindeldurchmesser mit einfließen. Hierzu ist es besonders zweckmäßig, wenn in einem (nicht flüchtigen) Speicher, insbesondere einem EEPROM, der Logikmittel mehrere Datensätze von Systemparametern abgelegt sind, die spezifisch sind für unterschiedliche Verdrängerpumpen (d.h. jeder Datensatz ist spezifisch für eine Verdrängerpumpe), insbesondere für unterschiedliche Bauarten und Baugrößen von Verdrängerpumpen und das zwischen diesen Datensätzen, insbesondere bei einer Grundkonfiguration, beispielsweise über eine Menüsteuerung, ausgewählt werden kann. Auf diese Weise ist es möglich, die gleichen Steuermittel im Zusammenhang mit unterschiedlichen Verdrängerpumpen einzusetzen.As will be explained later, it is particularly preferred if in the calculation of the at least one first limit value and / or the at least one second limit value positive displacement pump-specific parameters, in particular geometry parameters, such as a gap, and / or a spindle diameter are included. For this purpose, it is particularly useful if in a (non-volatile) memory, in particular an EEPROM, the logic means several sets of system parameters are stored, which are specific for different positive displacement pumps (ie each record is specific to a positive displacement pump), in particular for different types and Sizes of positive displacement pumps and which can be selected between these data sets, in particular in a basic configuration, for example via a menu control. In this way it is possible to use the same control means in connection with different positive displacement pumps.
Die Steuermittel ermöglichen erstmals mögliche negative Auswirkungen bei aktuellen, sich ändernden Betriebsparametern einer Führungsgröße bzw. die Auswirkungen aus einer aus der Führungsgröße unmittelbar resultierenden Stellgröße auf die Intaktheit der Verdrängerpumpe und/oder auf die Produktqualität, d.h. die Qualität des Mittels der Verdrängerpumpe geförderten Förderfluids anhand eines Vergleichs mit einem situativ bestimmten, d.h. sich im Laufe der Zeit ändernden Grenzwert zu erkennen und gegebenenfalls gegenzusteuern, indem bei Erkennen eines Gefährdungspotenzials nicht wie bisher die unmittelbar aus der Führungsgröße resultierende, vom Regler erzeugte Stellgröße (Spannungssignal) unmittelbar vom Frequenzumrichter in eine Verdrängerpumpenmotordrehzahl umgesetzt wird oder der Verdrängerpumpenmotor durch Ansteuerung eines Schützes einfach ausgeschaltet wird, sondern indem stattdessen eine, insbesondere reduzierte, oder erhöhte in Abhängigkeit eines ersten Betriebsparameters und mindestes eines, bevorzugt gemessenen, weiteren Ist-Betriebsparameters berechnete korrigierte Stellgröße (vorzugsweise größer null) dem Frequenzumrichter übergeben wird. Bevorzugt handelt es sich bei der korrigierten Stellgröße um die von den gemeinsam oder alternativ vorgesehenen ersten bzw. zweiten Grenzwertevorgabemitteln berechneten ersten bzw. zweiten Grenzwert.For the first time, the control means enable possible negative effects on current, changing operating parameters of a reference variable or the effects of a manipulated variable directly resulting from the reference variable on the integrity of the positive displacement pump and / or on the product quality, i. the quality of the means of the positive displacement pump delivered delivery fluid on the basis of a comparison with a situational determined, i. to recognize itself in the course of time changing limit and counteract if necessary, by the immediate from the reference variable resulting from the controller manipulated variable (voltage signal) is immediately converted by the frequency converter in a positive displacement motor speed when detecting a hazard potential or the positive displacement motor by controlling a contactor is simply turned off, but instead by one, in particular reduced, or increased in response to a first operating parameter and at least one, preferably measured, further actual operating parameter calculated corrected manipulated variable (preferably greater than zero) is passed to the frequency converter. The corrected manipulated variable is preferably the first or second limit value calculated by the jointly or alternatively provided first or second limit value adjusting means.
Die physikalischen Größen (Parameter) der Pumpendrehzahl, der Förderfluidviskosität und des Förderfluiddrucks stehen in dem folgenden physikalischen Zusammenhang, d.h. sind gegenseitig voneinander abhängig: ![]()
- n : Pumpendrehzahl
- p : Förderfluiddruck in Druckleitung bzw. Förderfluiddruckdifferenz an der Pumpe Exponent a, Faktor b und c Konstanten der Verdrängerpumpe,
- k: Faktor der Förderfluidschmierfähigkeit
- υ: Förderfluidviskosität
- n: pump speed
- p: conveying fluid pressure in pressure line or conveying fluid pressure difference at the pump exponent a, factor b and c constants of the positive displacement pump,
- k: Factor of conveying fluid lubricity
- υ: conveying fluid viscosity
Gemäß eines bevorzugten Ausführungsbeispiels ist vorgesehen, dass die Steuermittel sämtliche vorstehenden Parameter zur Ansteuerung des Frequenzumrichters berücksichtigen, wobei vorzugsweise die Pumpendrehzahl in Form der Stellgröße Berücksichtigung findet, der Förderfluiddruck, vorzugsweise gemessen am oder in der Nähe des Druckstutzens oder alternativ aus weiteren Parametern berechnet, als erster Ist-Betriebsparameter und die Förderfluidviskosität oder ein Parameter, insbesondere ein Fluidparameter, zu welchem die Förderfluidviskosität in einem physikalischen Zusammenhang steht, insbesondere die Förderfluidtemperatur als zweiter Betriebsparameter, wobei vorgenannter erster Ist-Betriebsparameter, d.h. der Förderfluiddruck und der weitere Ist-Betriebsparameter vorzugsweise die Förderfluidviskosität oder die Förderfluidtemperatur mittels der ersten Grenzwertvorgabemittel berücksichtigt werden, um den ersten Grenzwert zu berechnen, dessen Über- bzw. Unterschreiten einen Deffektzustand der Verdrängerpumpe zur Folge haben könnte. Die Vergleichsmittel vergleichen dann die vom Regler ausgegebene Stellgröße, also ein Drehzahlsignal mit dem ersten Grenzwert, wobei erste Korrekturmittel eine korrigierte Stellgröße, d.h. ein korrigiertes Drehzahlsignal für den Fall ausgeben, dass die vom Regler ausgegebene Stellgröße den unter Berücksichtigung des Förderfluiddrucks und der Förderfluidviskosität bzw. eines hierzu in einem funktionalen Zusammenhang stehenden Parameters überbzw. unterschreitet, wobei es sich bei der korrigierten Stellgröße, d.h. dem korrigierten Drehzahlsignal vorzugsweise um den ersten, zuvor mit Hilfe der ersten Grenzwertvorgabemitteln errechneten Grenzwert handelt. Als Führungsgrößen kommen bei der bevorzugten Ausführungsform ein Förderfluidvolumenstrom (bzw. die den Fördervolumenstrom widerspiegelnde Pumpendrehzahl) oder ein Förderfluiddruck zur Anwendung.According to a preferred embodiment, it is provided that the control means take into account all the above parameters for controlling the frequency converter, wherein preferably the pump speed in the form of the manipulated variable is taken into account finds, the conveying fluid pressure, preferably measured at or near the pressure port or alternatively calculated from other parameters, as the first actual operating parameter and the conveying fluid viscosity or a parameter, in particular a fluid parameter to which the conveying fluid viscosity is in a physical context, in particular the delivery fluid temperature as the second operating parameter, wherein the aforementioned first actual operating parameter, ie the conveying fluid pressure and the further actual operating parameter, preferably the conveying fluid viscosity or the conveying fluid temperature are taken into account by means of the first limiting value specification means in order to calculate the first limiting value whose exceeding or falling below a Deffektzustand the positive displacement pump could have resulted. The comparison means then compare the control variable output by the controller, ie a speed signal with the first limit value, wherein first correcting means output a corrected manipulated variable, ie a corrected speed signal in the event that the manipulated variable output by the controller, taking into account the conveying fluid pressure and the conveying fluid viscosity or of a parameter related thereto in a functional context. is below, wherein it is the corrected manipulated variable, ie the corrected speed signal is preferably the first, previously calculated using the first threshold value setting means limit value. In the preferred embodiment, a delivery fluid volume flow (or the pump speed reflecting the delivery volume flow) or a delivery fluid pressure are used as reference variables.
Diese bevorzugte Ausführungsform wird dem in der Praxis häufig auftretenden Fall gerecht, dass eine schnelle Störgrößenänderung, z.B. eine schlagartige Durchflusswiderstandsänderung zu einer sehr schnellen Druckänderung und damit zu einer schnellen Änderung des Drehmomentbedarfs an der Pumpe führt. Im Falle einer schnellen Druckerniedrigung bei großen Pumpenantrieben würde dies zu einer schnellen Drehzahlerhöhung führen. Eine unzulässige Drehzahlerhöhung kann durch die Berücksichtigung des Förderfluiddrucks, vorzugsweise gemessen am Druckstutzen als erster Betriebsparameters und der unmittelbaren oder mittelbaren Berücksichtigung der Förderfluidviskosität als zweiter Betriebsparameter bei der Berechnung des ersten Grenzwertes verhindert werden, so dass eine Beschädigung der Pumpe ausbleibt.This preferred embodiment does justice to the case that frequently occurs in practice that a rapid change in the disturbance, e.g. a sudden flow resistance change leads to a very rapid change in pressure and thus to a rapid change in the torque requirement at the pump. In the case of a rapid pressure reduction for large pump drives, this would lead to a rapid speed increase. An impermissible speed increase can be prevented by taking into account the delivery fluid pressure, preferably measured at the discharge nozzle as a first operating parameter and the direct or indirect consideration of the delivery fluid viscosity as a second operating parameter in the calculation of the first limit, so that damaging the pump fails.
Bei kleinen Antriebsmotoren würde eine sehr schnelle schlagartige Druckerhöhung zu einer schnellen Drehzahlreduzierung führen, wobei auch hier die Berücksichtigung des vorgenannten Erstbetriebsparameters und des vorgenannten weiteren Betriebsparameters zu einer korrigierten Stellgröße, d.h. einem korrigierten Drehzahlsignal führt, wodurch auch in diesem Fall eine Beschädigung der Pumpe verhindert werden kann.In the case of small drive motors, a very rapid sudden increase in pressure would lead to a rapid speed reduction, whereby the consideration of the aforementioned Erstbetriebsparameters and the aforementioned further operating parameter to a corrected manipulated variable, ie a corrected speed signal leads, whereby damage to the pump can be prevented in this case.
Im Falle der Realisierung des Mediumschutzes kommen bevorzugt als Führungsgröße der Förderfluiddruck, der Förderfluidvolumenstrom bzw. die Drehzahl oder aber auch die Förderfluidviskosität bzw. ein Parameter, insbesondere ein Fluidparameter, von dem die Förderfluidviskosität unmittelbar abhängig ist in Betracht. Die Stellgröße ist bevorzugt die Drehzahl bzw. ein Drehzahlsignal, wobei zur Berechnung des Grenzwertes, insbesondere eine maximal zulässige Drehzahl bevorzugt als erster Betriebsparameter ein Förderfluidvolumenstrom und als weiterer Ist-Betriebsparamter der Förderfluiddruck (insbesondere gemessen am Druckstutzen der Pumpe) berücksichtigt wird.In the case of the realization of the medium protection, the conveying fluid pressure, the delivery fluid volume flow or the rotational speed or also the delivery fluid viscosity or a parameter, in particular a fluid parameter, of which the delivery fluid viscosity is directly dependent, preferably come into consideration. The manipulated variable is preferably the rotational speed or a rotational speed signal, wherein for calculating the limit value, in particular a maximum permissible rotational speed, a delivery fluid volume flow is considered as the first operating parameter and the delivery fluid pressure (in particular measured at the discharge port of the pump) is taken into account as a further actual operating parameter.
Wie erwähnt, kann der Vergleich mit dem mindestens einen Grenzwert auf unterschiedliche Weise realisiert werden. So ist es besonders bevorzugt, wenn zum Vergleich mit dem ersten Grenzwert die von dem Regler erzeugte Stellgröße herangezogen wird, oder alternativ die von den ersten Korrekturmitteln oder die von fakultativ vorgesehenen weiteren, beispielsweise zweiten, Korrekturmitteln ausgegebene korrigierte Stellgröße. Auch ist es möglich, nicht unmittelbar die vorgenannte Stellgröße oder eine korrigierte Stellgröße für den Vergleich heranzuziehen, sondern einen Vergleichswert, der auf Basis eines vorbestimmten funktionalen Zusammenhangs aus der Stellgröße oder einer korrigierten Stellgröße berechnet wird. In analoger Weise ist es möglich für den Vergleich mit dem zweiten Grenzwert die vom Regler erzeugte Stellgröße heranzuziehen oder eine korrigierte Stellgröße, wobei es bei der korrigierten Stellgröße um die, falls vorhanden, von den ersten Korrekturmitteln ausgegebene korrigierte Stellgröße handeln kann oder um die von den zweiten Korrekturmitteln ausgegebene korrigierte Stellgröße. Ebenso ist es möglich einen Vergleichswert z.B. eine aktuelle Scherrate auf Basis eines der vorgenannten Werte zu berechnen und diesen für den Vergleich heranzuziehen.As mentioned, the comparison with the at least one limit value can be realized in different ways. Thus, it is particularly preferred if the manipulated variable generated by the controller is used for comparison with the first limit value, or alternatively the corrected manipulated variable output by the first correction means or by the optionally provided further, for example second, correction means. It is also possible not to directly use the aforementioned manipulated variable or a corrected manipulated variable for the comparison, but rather a comparison value which is calculated on the basis of a predetermined functional relationship from the manipulated variable or a corrected manipulated variable. In an analogous manner, it is possible to use the manipulated variable generated by the controller for the comparison with the second limit value or a corrected manipulated variable, wherein the corrected manipulated variable may be the corrected manipulated variable output by the first correcting means, if present, or that of the second correction means output corrected correcting variable. It is also possible to have a comparison value, e.g. calculate a current shear rate based on one of the above values and use this for comparison.
Wie bereits angedeutet, können die Logikmittel die vom Regler erzeugte Stellgröße, eine korrigierte Stellgröße oder einen auf Basis der Stellgröße und/oder der korrigierten Stellgröße berechneten Vergleichswert oder ein Ist-Betriebsparameter, insbesondere der erste Ist-Betriebsparameter und/oder der weitere Ist-Betriebsparameter auch mit mindestens einem für die den Steuermitteln zugeordnete Verdrängerpumpe spezifischen, festen Grenzwert verglichen werden, wobei für den Fall, dass ein solcher Grenzwert um ein bestimmtes Maß über- bzw. unterschritten wird von Korrekturmitteln eine korrigierte Stellgröße ausgegeben wird. Handelt es sich bei dem zu vergleichenden Ist-Betriebsparameter beispielsweise um einen gemessenen Ist-Schwingungswert und überschreitet dieser ein für die bestimmte Verdrängerpumpe maximales Maß (Grenzwert) so wird von Korrekturmitteln eine korrigierte Stellgröße ausgegeben, wobei diese Stellgrößenkorrektur einer möglichen Korrektur durch erste Korrekturmittel und/oder durch zweite Korrekturmittel vor- oder nachgelagert sein kann. Bei der korrigierten Stellgröße handelt es sich im einfachsten Fall um ein um einen bestimmten Faktor erhöhtes oder reduziertes Stellgrößensignal, oder ein Stellgrößensignal, das ein in einem Speicher abgelegten Wert annimmt, oder ein simulierten, berechneten Wert, für den ein Über- bzw. Unterschreiten des Grenzwertes nicht zu erwarten ist.As already indicated, the logic means may be the manipulated variable generated by the controller, a corrected manipulated variable or a comparison value calculated on the basis of the manipulated variable and / or the corrected manipulated variable or an actual operating parameter, in particular the first actual operating parameter and / or the further actual operating parameter also with at least one positive displacement pump associated with the control means, fixed limit value are compared, wherein in the event that such a limit value is exceeded or fallen below by a certain level of correction means, a corrected manipulated variable is output. If the actual operating parameter to be compared is, for example, a measured actual oscillation value and if it exceeds a maximum value (limit value) for the particular positive displacement pump, a corrected manipulated variable is output by the correction means, this manipulated variable correction being corrected by first correction means and / or or may be upstream or downstream by second correction means. In the simplest case, the corrected manipulated variable is a manipulated variable signal which is increased or reduced by a specific factor, or a manipulated variable signal which assumes a value stored in a memory, or a simulated, calculated value for which an overshoot or undershoot of the value Limit value is not expected.
Die zuletzt geschilderte Ausgestaltung der Steuermittel dient vor allem zum Erkennen einer plötzlich auftretenden Beschädigung oder eines plötzlich auftretenden Beschädigungsanzeichens der Verdrängerpumpe. Wird beispielsweise von Sensormitteln als gemessener Ist-Betriebsparameter ein Schwingungsparameter überwacht und überschreitet dieser einen in einem nicht flüchtigen Speicher hinterlegten oder bevorzugt alternativ oder zusätzlich einen in Abhängigkeit eines gemessenen Ist-Parameters bestimmten Grenzwert, so wird nicht die der Führungsgröße entsprechende Stellgröße weitergegeben, sondern einen, beispielsweise um den Faktor 2 reduzierte errechnete Stellgröße, um die Verdrängerpumpe noch möglichst lange betreiben zu können, ohne dass ein Schaden, beispielsweise ein Lagerschaden auftritt oder sich verschlimmert, für den der erhöhte Schwingungswert ein Indiz darstellen kann.The last-described embodiment of the control means is primarily used to detect a sudden damage or sudden damage of the positive displacement pump. If, for example, a vibration parameter is monitored by sensor means as the measured actual operating parameter and if it exceeds a limit value stored in a nonvolatile memory or preferably alternatively or additionally a limit value determined as a function of a measured actual parameter, then the manipulated variable corresponding to the reference variable is not passed on, but one , For example, reduced by a factor of 2 calculated manipulated variable to operate the positive displacement pump as long as possible without any damage, such as bearing damage occurs or worsened, for which the increased vibration value can be an indication.
Im Hinblick auf die konkrete Ausgestaltung des, vorzugsweise von einem Mikrokontroller gebildeten Reglers der Steuermittel gibt es unterschiedliche Möglichkeiten. Bevorzugt ist der Regler als PI-Regler oder als PID-Regler ausgeführt.With regard to the specific embodiment of the regulator of the control means, which is preferably formed by a microcontroller, there are different possibilities. Preferably, the controller is designed as a PI controller or as a PID controller.
Im Hinblick auf die Auswahl bzw. Ausgestaltung des ersten Ist-Betriebsparameters, der dem Regler zum Ermitteln einer Stellgröße zugeführt wird und auf dessen Basis gegebenenfalls der erste (Pumpenschutz-)Grenzwert und/oder der zweite (Förderfluidschutz-)Grenzwert berechnet wird, und der ggf. zur Berechnung der korrigierten Stellgröße von den Korrekturmitteln herangezogen wird, gibt es unterschiedliche Möglichkeiten. Bevorzugt handelt es sich bei diesem ersten Ist-Betriebsparameter um eine bevorzugt gemessene, Ist-Regelgröße aus der Regelstrecke, insbesondere eine sogenannte Ist-Hauptregelgröße, beispielsweise einen Ist-Druck des Förderfluids oder eine Ist-Druckdifferenz des Förderfluids, beispielsweise zwischen Saug- und Druckseite der Verdrängerpumpe oder um einen Ist-Volumenstrom des Förderfluids. Der erste Betriebsparameter wird bevorzugt gemessen, kann alternativ auch simuliert bzw. berechnet werden, insbesondere aus mehreren weiteren Ist-Betriebsparametern.With regard to the selection or design of the first actual operating parameter, which is supplied to the controller for determining a manipulated variable and based on which the first (pump protection) limit value and / or the second (Förderfluidschutz-) limit value is calculated if necessary, and the If necessary, it is used for the calculation of the corrected manipulated variable by the correction means, there are different possibilities. Prefers this first actual operating parameter is a preferably measured, actual controlled variable from the controlled system, in particular a so-called actual main controlled variable, for example an actual pressure of the conveying fluid or an actual pressure difference of the conveying fluid, for example between suction side and pressure side Positive displacement pump or to an actual volume flow of the fluid. The first operating parameter is preferably measured, but can alternatively also be simulated or calculated, in particular from a plurality of further actual operating parameters.
Wie eingangs bereits erläutert, muss der erste und/oder zweite Grenzwert nicht nur anhand des ersten, dem Regler zugeführten Ist-Betriebsparameters berechnet werden, sondern zusätzlich auf Grundlage eines funktionellen Zusammenhanges auf Basis eines anderen (weiteren) Ist-Betriebsparameters. Bei dem zumindest einen weiteren Ist-Betriebsparameter kann es sich um eine gemessene oder auf Basis eines, beispielsweise gemessenen, Ist-Wertes berechnete Hilfsstellgröße, insbesondere des Frequenzumrichters handeln, beispielsweise um einen Drehfrequenzsollwert des Frequenzumrichters oder einen Drehmomentsollwert des Frequenzumrichters. Auch ist es möglich, dass es sich bei mindestes einem weiteren Ist-Betriebsparameter um eine gemessene oder auf Basis eines Ist-Wertes berechnete Hilfsregelgröße, insbesondere eine Drehzahl des Verdrängerpumpenmotors oder ein Drehmoment des Verdrängerpumpenmotors handelt. Auch ist es möglich, dass es sich bei mindestens einem weiteren Ist-Betriebsparameter der in die Berechnung des ersten und/oder zweiten Grenzwertes und/oder in die Berechnung einer korrigierten Stellgröße und/oder in die Berechnung eines Vergleichswertes einfließt um eine gemessene Temperatur, beispielsweise eine Förderfluidtemperatur oder eine Lagertemperatur, insbesondere eines Wälzlagers einer Antriebsspindel der Verdrängerpumpe handeln. Auch ist es möglich, dass es sich bei dem mindestens einen weiteren Ist-Betriebsparameter um einen gemessenen Vibrationswert handelt. Auch ist es möglich, dass es sich bei dem mindestes einen weiteren Ist-Betriebsparameter um eine gemessene oder berechnete Förderfluidviskosität handelt. Auch ist es möglich, dass es sich bei dem mindestens einen weiteren Ist-Betriebsparameter um eine gemessene Leckagemenge handelt. Besonders bevorzugt ist es, wenn nicht nur der erste Ist-Betriebsparameter nur ein einziger weiterer Ist-Betriebsparameter bei der Berechnung eines Grenzwertes oder einer korrigierten Stellgröße berücksichtigt werden, sondern beispielsweise zusätzlich zum ersten Hilfsbetriebsparameter zwei oder mehrere weitere, vorzugsweise unterschiedliche Ist-Betriebsparameter.As already explained above, the first and / or second limit value must be calculated not only on the basis of the first actual operating parameter supplied to the controller, but additionally on the basis of a functional relationship on the basis of another (further) actual operating parameter. The at least one further actual operating parameter can be a measured auxiliary variable or, in particular, the frequency converter calculated on the basis of an actual value measured, for example a frequency reference of the frequency converter or a torque reference of the frequency converter. It is also possible that at least one further actual operating parameter is a measured or calculated on the basis of an actual value auxiliary control variable, in particular a speed of the positive displacement motor or a torque of the positive displacement motor. It is also possible for at least one further actual operating parameter to be included in the calculation of the first and / or second limit value and / or in the calculation of a corrected manipulated variable and / or in the calculation of a comparison value by a measured temperature, for example a conveying fluid temperature or a bearing temperature, in particular a rolling bearing of a drive spindle of the positive displacement pump act. It is also possible for the at least one further actual operating parameter to be a measured vibration value. It is also possible for the at least one further actual operating parameter to be a measured or calculated delivery fluid viscosity. It is also possible for the at least one further actual operating parameter to be a measured leakage quantity. It is particularly preferred if not only the first actual operating parameter only a single further actual operating parameter is taken into account in the calculation of a limit value or a corrected manipulated variable but, for example, additionally for the first auxiliary operating parameter two or more further, preferably different actual operating parameters.
Für Anwendungen des Mediumschutzes (bevorzugt nicht für Anwendungen des Pumpenschutzes kann es sich bei dem mindestens einen weiteren Betriebsparameter um eine gemessene Ist-Regelgröße, beispielsweise eine gemessene Ist-Hauptregelgröße handeln, beispielsweise um einen Ist-Druck des Förderfluids, eine Ist-Druckdifferenz oder einen Ist-Volumenstrom.For applications of medium protection (preferably not for pump protection applications, the at least one further operating parameter may be a measured actual control variable, for example a measured actual main control variable, for example an actual pressure of the conveying fluid, an actual pressure difference or a actual flow.
Wird beispielsweise ein Ist-Druck als Betriebsparameter gemessen, beispielsweise ein Überdruck am Druckstutzen der Verdrängerpumpe, so kann ein zu hoher Druck verdrängerpumpengefährdend sein, insbesondere eine Berstmöglichkeit beinhalten. Dabei kann der maximal zulässige Druck abhängig sein von weiteren Ist-Betriebsparametern, wie beispielsweise der Temperatur des Förderfluids.If, for example, an actual pressure is measured as the operating parameter, for example an overpressure on the discharge nozzle of the positive displacement pump, too high a pressure can be hazardous to the positive displacement pump, in particular a bursting possibility. In this case, the maximum allowable pressure may be dependent on other actual operating parameters, such as the temperature of the conveying fluid.
Ein zu geringer Druck am Saugstutzen kann als Kavitationsindikator genutzt werden. Bevorzugt wird neben dem Druck als Betriebsparameter die Förderfluidviskosität berücksichtigt, insbesondere aus messtechnischen Gründen stellvertretend für die Viskosität des Förderfluids dessen gemessen Temperatur.Too little pressure at the suction nozzle can be used as a cavitation indicator. Preferably, in addition to the pressure as the operating parameter, the delivery fluid viscosity is taken into account, in particular for metrological reasons representative of the viscosity of the delivery fluid whose measured temperature.
Die Temperatur kann also zusätzlich oder alternativ von einem Druck als Ist-Betriebsparameter überwacht werden. Eine Übertemperatur des Förderfluids kann pumpengefährdend sein, insbesondere im Hinblick auf einen möglichen Lagerschaden.The temperature can thus be additionally or alternatively monitored by a pressure as actual operating parameters. An excess temperature of the conveying fluid can be hazardous to the pump, in particular with regard to a possible bearing damage.
Als Ist-Betriebsparameter kann bei der Grenzwertberechnung und/oder der Berechnung eines korrigierten Stellwertes zusätzlich oder alternativ zum Druck die Motordrehzahl gemäß einer festen Zuordnung bzw. Funktion berücksichtigt werden, die direkt proportional zur Verdrängerpumpendrehzahl (Spindeldrehzahl) ist, insbesondere dieser entspricht. Eine zu hohe oder zu niedrige Drehzahl kann ebenfalls ein Risiko darstellen, insbesondere dann, wenn weitere Betriebsparameter, wie beispielsweise die Temperatur und/oder der Druck gewisse Grenzen über- bzw. unterschreiten.When the limit value calculation and / or the calculation of a corrected control value, the engine speed can be taken into account in accordance with a fixed assignment or function which is directly proportional to the positive displacement pump speed (spindle speed), in particular corresponds to this. Too high or too low a speed can also be a risk, especially if further operating parameters, such as the temperature and / or the pressure exceeds or falls below certain limits.
Zusätzlich oder alternativ zu den vorstehenden Ist-Betriebsparametern können Schwingungen (Vibrationen) der Verdrängerpumpe und/oder des Verdrängerpumpenmotors überwacht werden. Zu starke Schwingungen gefährden dabei die Ausrichtung zwischen Verdrängerpumpenmotor und Verdrängerpumpe mit der möglichen Folge eines Lagerschadens an der Verdrängerpumpe und/oder am Verdrängerpumpenmotor. Auch sind bei unzulässigen Schwingungen Gleitringdichtungsschäden möglich. Insgesamt kann die Lebensdauer der Verdrängerpumpe durch unzulässige Schwingungen reduziert werden, insbesondere dann, wenn weitere Ist-Betriebsparameter, wie die Drehzahl und/oder die Temperatur und/oder der Druck gewisse Grenzen über- bzw. unterschreiten.In addition or as an alternative to the above actual operating parameters, vibrations (vibrations) of the positive-displacement pump and / or of the positive-displacement pump motor can occur be monitored. Excessive vibrations jeopardize the alignment between positive displacement pump motor and positive displacement pump with the possible consequence of bearing damage to the positive displacement pump and / or the positive displacement motor. Even with impermissible vibrations mechanical seal damage is possible. Overall, the life of the positive displacement pump can be reduced by impermissible oscillations, in particular if further actual operating parameters, such as the rotational speed and / or the temperature and / or the pressure exceed or fall below certain limits.
Zusätzlich oder alternativ zu den vorstehenden weiteren Betriebsparametern kann die Viskosität des Förderfluids, die in einem funktionalen Zusammenhang zur Förderfluidtemperatur steht, direkt oder mittelbar über die Temperatur bei der Bestimmung eines Grenzwertes, einer korrigierten Stellgröße oder, falls vorgesehen eines Vergleichswertes berücksichtigt werden. Eine zu geringe Viskosität kann verdrängerpumpengefährdend sein aufgrund daraus resultierender nachlassender Schmiereigenschaften des Förderfluids zwischen den Spindeln. Eine zu hohe Viskosität kann verdrängerpumpenmotorgefährdend sein, so dass das Drehmoment zu sehr ansteigt. Zudem kann eine zu hohe Viskosität (zu niedrige Temperatur) verdrängerpumpengefährdend sein, beispielsweise beim Einsatz einer Magnetkupplung, welche durch eine zu hohe Viskosität unbemerkt abreißen kann, was zur Zerstörung der Verdrängerpumpe bzw. der Magnetkupplung führt.In addition or as an alternative to the above further operating parameters, the viscosity of the conveying fluid, which is functionally related to the conveying fluid temperature, can be taken into account directly or indirectly via the temperature in determining a limit value, a corrected manipulated variable or, if provided, a comparison value. Too low a viscosity can be hazardous to the pump because of the resulting decreasing lubricating properties of the fluid between the spindles. Too high a viscosity may be positive displacement pump motor hazard, so that the torque increases too much. In addition, too high a viscosity (too low a temperature) can be a risk of displacement, for example when using a magnetic coupling, which can break off unnoticed due to too high a viscosity, which leads to the destruction of the positive displacement pump or the magnetic coupling.
Neben den zuvor erläuterten Ist-Betriebsparametern, die einzeln, in Gruppen oder bevorzugt gemeinsam zur Sicherstellung eines Komponentenschutzes (Verdrängerpumpenschutzes) oder zur Sicherstellung bzw. Gewährleistung einer Förderfluidqualität gemessen und gemäß einer mathematischen Funktion bei Berechnungen berücksichtigt werden, kann mindestens einer der nachstehenden Ist-Betriebsparameter überwacht werden, beispielsweise das Drehmoment, welches funktional abhängig von der Viskosität des Förderfluids ist. Insbesondere kann das Drehmoment als Indikator für einen ansteigenden Verdrängerpumpenverschleiß berücksichtigt werden.In addition to the above-described actual operating parameters, which are measured individually, in groups or preferably together to ensure component protection (positive displacement pump protection) or to ensure or guarantee a delivery fluid quality and taken into account in calculations according to a mathematical function, at least one of the following actual operating parameters be monitored, for example, the torque which is functionally dependent on the viscosity of the conveying fluid. In particular, the torque can be taken into account as an indicator of an increasing displacement of the positive displacement pump.
Zusätzlich oder alternativ kann der Verdrängerpumpenmotorstrom in die Berechnung eines Grenzwertes, einer korrigierten Stellgröße oder falls vorgesehen in einen Vergleichswert einfließen. Der Motorstrom ist eine einfach und kostengünstig zu messende Größe, insbesondere bei gleichbleibenden anderen Parametern, wie beispielsweise der Viskosität für das Drehmoment, welche wiederum auf Verschleiß der Pumpe hinweisen kann. Zusätzlich oder alternativ kann die Leckagerate überwacht werden. Hier liegt der Gedanke zugrunde, dass jede Gleitringdichtung eine Nennleckage benötigt, damit die statische und dynamische Komponente der Gleitringdichtung geschmiert wird. Steigt die Leckagerate an, kann dies ein Indikator für einen beginnenden Gleitringdichtschaden sein.Additionally or alternatively, the positive displacement pump motor current can be included in the calculation of a limit value, a corrected manipulated variable or, if provided, in a comparison value. The motor current is a simple and inexpensive to measure Size, especially at constant other parameters, such as the viscosity of the torque, which in turn may indicate wear of the pump. Additionally or alternatively, the leakage rate can be monitored. This is based on the idea that each mechanical seal requires a nominal leakage in order to lubricate the static and dynamic components of the mechanical seal. If the leakage rate increases, this can be an indicator of incipient mechanical seal damage.
Falls nicht, was jedoch bevorzugt ist, unmittelbar die vom Regler erzeugte Stellgröße oder die von Korrekturmitteln korrigierte Stellgröße mit einem ersten oder zweiten Grenzwert verglichen werden soll, sondern zusätzlich oder alternativ für diesen Vergleich ein Vergleichwert berechnet werden soll, der in einem funktionalen Zusammenhang zur Stellgröße oder zur korrigierten Stellgröße steht, kann in die Berechnung dieses Vergleichswertes anhand eines funktionalen Zusammenhangs mehrerer der vorgenannten Ist-Betriebsparameter, insbesondere der erste Ist-Betriebsparameter und mindestens einer der weiteren Ist-Betriebsparemeter einfließen.If not, which is preferred, however, the manipulated variable generated by the controller or the manipulated variable corrected by the correction means should be compared with a first or second limit value, but additionally or alternatively for this comparison a comparative value should be calculated, which is in a functional relationship to the manipulated variable or is the corrected manipulated variable, may be included in the calculation of this comparison value based on a functional relationship of several of the aforementioned actual operating parameters, in particular the first actual operating parameters and at least one of the other actual operating parameters.
Besonders bevorzugt ist es, wenn die ersten und/oder zweiten Grenzwertvorgabemittel und/oder die ersten oder zweiten Korrekturmittel bei ihren Berechnungen für die den Steuermitteln zugeordnete verdrängerpumpespezifische Geometrieparameter berücksichtigen, beispielsweise eine Spaltbreite und/oder einen Spindeldurchmesser. Zusätzlich oder alternativ können die Grenzwertvorgabemittel und/oder die Korrekturmittel einen in einem Speicher abgelegten Förderfluidparameter, insbesondere ein Scherverhalten des Förderfluids berücksichtigend ausgebildet sein.It is particularly preferred if the first and / or second limiting value specification means and / or the first or second correction means take into account in their calculations for the displacement pump-specific geometry parameters assigned to the control means, for example a gap width and / or a spindle diameter. Additionally or alternatively, the limit value specification means and / or the correction means may be designed taking into account a delivery fluid parameter stored in a storage, in particular a shearing behavior of the delivery fluid.
So ist es insbesondere im Hinblick auf die Überwachung der Qualität des Förderfluids oder des damit hergestellten Endproduktes vorteilhaft, die Winkelgeschwindigkeiten der Verdrängerpumpenspindel bei der Berechnung eines Grenzwertes, einer korrigierten Stellgröße oder, falls vorgesehen, bei der Berechnung eines Vergleichswertes zu berücksichtigen. Dabei sollte bevorzugt mindestens ein Geometrieparameter sowie der Steigungswinkel der betreffenden Spindel berücksichtigt werden, da unterschiedliche Steigungswinkel der Spindel bei gleicher Motordrehzahl zu unterschiedlichen Relativgeschwindigkeiten innerhalb der Verdrängerpumpe führen.Thus, it is advantageous in particular with regard to the monitoring of the quality of the delivery fluid or of the final product produced therewith to take into account the angular velocities of the positive displacement pump spindle when calculating a limit value, a corrected manipulated variable or, if provided, during the calculation of a comparison value. In this case, preferably at least one geometry parameter and the pitch angle of the relevant spindle should be taken into account, since different pitch angles of the spindle at the same engine speed lead to different relative speeds within the positive displacement pump.
Denkbar ist auch eine Variante, bei der der mindestens eine gemessene Ist-Parameter, beispielsweise der erste Ist-Betriebsparameter oder ein weiterer Ist-Parameter nicht unmitttelbar von Sensormitteln in die Steuermittel eingespeist wird, sondern bei der der mindestens eine Ist-Betriebsparameter den Steuermitteln von einer Prozess-Leitwarte übermittelt wird, insbesondere, wie später noch erläutert werden wird, über ein Bussystem.Also conceivable is a variant in which the at least one measured actual parameter, for example the first actual operating parameter or a further actual parameter, is not fed directly by sensor means into the control means but at the at least one actual operating parameter to the control means of a process control room is transmitted, in particular, as will be explained later, via a bus system.
Besonders bevorzugt ist es, wenn bei der Berechnung des mindestens einen ersten und/oder mindestens einen zweiten Grenzwertes eine Schergefälle Berücksichtigung findet, insbesondere ein maximal zulässiges, in einem Speicher abgelegtes Schergefälle und/oder ein aktuell anhand mindestens eines Ist-Betriebsparameters berechnetes Schergefälle gemäß einem funktionalen Zusammenhang berücksichtigt wird.It is particularly preferred if, in the calculation of the at least one first and / or at least one second limit value, a shear rate is taken into account, in particular a maximum permissible shear rate stored in a memory and / or a shear rate currently calculated using at least one actual operating parameter according to a functional relationship is taken into account.
Wie bereits erläutert, ist es denkbar, dass neben einer dynamischen Grenzwertbetrachtung auch eine statische Grenzwertbetrachtung erfolgt, bei welcher die Stellgröße, eine korrigierte Stellgröße, ein Vergleichswert oder unmittelbar ein erster Betriebsparameter und/oder ein weiterer Betriebsparameter mit einem in einem, vorzugsweise nicht flüchtigen Speicher der Logikmittel abgelegten Grenzwert verglichen wird/werden und, sollte der Grenzwert um ein vorbestimmtes Maß über- bzw. unterschritten werden, eine korrigierte Stellgröße ermittelt und ausgegeben wird, um somit die Pumpe oder Produktqualität nicht zu gefährden. Im einfachsten Fall, kann hierzu die vom Regler vorgegebene Stellgröße oder aufgrund eines vorangehenden Vergleichs bereits korrigierte Stellgröße um ein vorgegebenes Maß, insbesondere einen vorgegebenen Faktor, erhöht oder reduziert werden.As already explained, it is conceivable that, in addition to a dynamic limit value analysis, a static limit value analysis takes place in which the manipulated variable, a corrected manipulated variable, a comparison value or directly a first operating parameter and / or a further operating parameter with one in a preferably non-volatile memory The limit value stored in the logic means is / are compared and, if the limit value should be exceeded or undershot by a predetermined amount, a corrected manipulated variable is determined and output so as not to jeopardize the pump or product quality. In the simplest case, for this purpose, the manipulated variable predetermined by the controller or, based on a preceding comparison, already corrected manipulated variable can be increased or reduced by a predetermined amount, in particular a predetermined factor.
Zusätzlich oder alternativ zu mindestens einem gemessenen und ersten Ist-Betriebsparameter und/oder zusätzlich oder alternativ zu einem gemessenen oder berechneten weiteren Ist-Betriebsparameter und/oder zu mindestens einem vorgegebenen verdrängerpumpenspezifischen Geometrieparameter können die ersten und/oder zweiten Grenzwertvorgabemittel und/oder die ersten und/oder zweiten Korrekturmittel bei der Berechnung des entsprechenden Grenzwertes oder der korrigierten Stellgröße einen Förderfluidparameter (fluidspezifischer Eigenschaftswert/Konstante) gemäß einer mathematischen Funktion oder Zuordnung berücksichtigend ausgebildet sein, der beispielsweise in einem nicht flüchtigen Speicher der Steuermittel abgelegt ist. Bevorzugt kann unter verschiedenen Fluidparameterdatensätzen manuell oder automatisch, beispielsweise in Abhängigkeit eines Messergebnisses, ausgewählt werden. Bevorzugt wird als Förderfluidparameter das Scherverhalten des Förderfluids berücksichtigt, insbesondere dann, wenn zur Bestimmung eines Grenzwertes oder einer korrigierten Stellgröße ein Schergefälle herangezogen wird.In addition or as an alternative to at least one measured and first actual operating parameter and / or additionally or alternatively to a measured or calculated further actual operating parameter and / or to at least one predefined displacement pump-specific geometry parameter, the first and / or second limit value specification means and / or the first and the second limit value specification means In the calculation of the corresponding limit value or the corrected manipulated variable, a second or second correction means may take into account a delivery fluid parameter (fluid-specific property value / constant) in accordance with a mathematical function or assignment which is stored, for example, in a non-volatile memory of the control means. Prefers can be selected under different fluid parameter data sets manually or automatically, for example, depending on a measurement result. The shear behavior of the conveying fluid is preferably taken into account as the conveying fluid parameter, in particular if a shear gradient is used to determine a limiting value or a corrected actuating variable.
Ganz besonders zweckmäßig ist es, wenn die Logikmittel zum Ermitteln und/oder Signalisieren einer Wartungsfälligkeit der Verdrängerpumpe in Abhängigkeit eines gemessenen oder berechneten Ist-Betriebsparameters und/oder in Abhängigkeit eines für den Steuermitteln zugeordneten verdrängerpumpenspezifischen Parameters ausgebildet sind. Bevorzugt umfassen die Logikmittel hierzu eine entsprechende Funktionseinheit, die den gemessenen oder berechneten Ist-Parameter und/oder den verdrängerpumpenspezifischen Parameter bei der Ermittlung der Wartungsfälligkeit berücksichtigend ausgebildet ist. Bevorzugt berechnet diese Funktionseinheit die Wartungsfälligkeit anhand einer vorgegebenen (funktionellen) Zuordnung. Die Wartungsfälligkeit wird bevorzugt über entsprechende Signalisierungsmittel, beispielsweise ein Display und/oder eine LED-Ampel, die unterschiedliche Farbsignale aussenden kann, signalisiert.It is particularly expedient if the logic means for determining and / or signaling a maintenance due date of the positive displacement pump are designed as a function of a measured or calculated actual operating parameter and / or as a function of a displacement-pump-specific parameter assigned to the control means. For this purpose, the logic means preferably comprise a corresponding functional unit which takes into account the measured or calculated actual parameter and / or the displacement-pump-specific parameter in determining the maintenance due date. This functional unit preferably calculates the maintenance due date based on a predetermined (functional) assignment. The maintenance due date is preferably signaled via corresponding signaling means, for example a display and / or an LED traffic light, which can emit different color signals.
Besonders zweckmäßig ist es, wenn die ersten und/oder zweiten Korrekturmittel derart ausgebildet sind, dass diese für den Fall, dass der Grenzwert um einen vorgegebenen, insbesondere sehr hohen oder sehr niedrigen Wert über- bzw. unterschritten wird, ein Stoppsignal für den Verdrängerpumpenmotor, insbesondere für ein Motorschütz aussenden, aufgrund dessen der Verdrängerpumpenmotor gestoppt wird, insbesondere um eine weitere Gefährdung der Verdrängerpumpe oder weitere Prozessaggregate oder der Qualität des Förderfluids zu vermeiden.It is particularly expedient if the first and / or second correction means are designed such that, in the event that the limit value is exceeded or fallen below by a predetermined, in particular very high or very low value, a stop signal for the positive displacement pump motor, in particular emit for a motor contactor, due to which the positive displacement pump motor is stopped, in particular to avoid further endangering the positive displacement pump or other process units or the quality of the conveying fluid.
In Weiterbildung der Erfindung ist mit Vorteil vorgesehen, dass die Steuermittel über ein Bussystem, insbesondere ein CAN-Bussystem, kommunizierend ausgebildet sind, insbesondere um mit anderen Verdrängerpumpensteuermitteln und/oder einer Prozess-leitwarte kommunizieren zu können, d.h. Daten übermitteln und/oder empfangen zu können. Besonders zweckmäßig ist es dabei, wenn im Steuermodul, insbesondere zur Kommunikation mit der Leitwarte und/oder mindestens einem weiteren Modul ein CAN-Bussystem zugeordnet ist, welches vorwiegend aus der Automobiltechnik bekannt ist. Dieses Bussystem ist, wie sich überraschend herausgestellt hat, besonders zuverlässig und robust im Zusammenhang mit Verdrängerpumpensystemen.In a development of the invention, it is advantageously provided that the control means are designed to communicate via a bus system, in particular a CAN bus system, in particular in order to communicate with other positive displacement pump control means and / or a process control system, ie transmit and / or receive data can. It is particularly expedient if in the control module, in particular for communication with the control room and / or at least one further module, a CAN bus system is assigned, which is known mainly from the automotive industry. This bus system is surprisingly found to be particularly reliable and robust in connection with positive displacement pump systems.
Besonders zweckmäßig ist es, wenn den Steuermitteln Eingabemittel, insbesondere in Form mindestens einer Taste, bevorzugt in Form von mehreren Tasten und/oder eines Touchscreens, etc. zugeordnet sind, um die Steuermittel konfigurieren und/oder auslesen zu können. Besonders bevorzugt kann über die Eingabemittel einer von mehreren in einem nicht flüchtigen Speicher abgelegten Systemparameterdatensätzen und/oder Förderfluidparameterdatensätzen ausgewählt werden.It is particularly expedient if the control means are assigned input means, in particular in the form of at least one key, preferably in the form of a plurality of keys and / or a touch screen, etc. in order to be able to configure and / or read out the control means. Particularly preferably, one of a plurality of system parameter data sets and / or delivery fluid parameter data sets stored in a non-volatile memory can be selected via the input means.
Ganz besonders zweckmäßig ist eine Ausführungsvariante der Steuermittel, bei der die Steuermittel Speichermittel aufweisen, die ausgebildet und angesteuert sind, um empfangene, errechnete und/oder ausgesendete Daten, insbesondere Messwerte oder Spannungsverläufe zu speichern, insbesondere mitzuloggen. Besonders bevorzugt sind die Speichermittel ausgebildet und angesteuert, um gemessene Ist-Betriebsparameter und/oder Führungsgrößen und/oder Stellgrößen und/oder korrigierte Stellgrößen zu speichern.An embodiment variant of the control means is particularly expedient, in which the control means have memory means which are designed and controlled to store, in particular also to log, received, calculated and / or transmitted data, in particular measured values or voltage profiles. The memory means are particularly preferably designed and controlled in order to store measured actual operating parameters and / or reference variables and / or manipulated variables and / or corrected manipulated variables.
Bevorzugt umfasst das System auch mindestens einen Sensor (Sensormittel), vorzugsweise mindestens zwei Sensoren, der bzw. die signalleitend mit den Steuermitteln verbunden sind, wobei der Sensor bzw. die Sensoren zum Messen des ersten Ist-Betriebssignals und ggf. mindestens eines weiteren Ist-Betriebssignals ausgebildet und angeordnet sind. Beispielsweise handelt es sich um einen Drucksensor zur Bestimmung eines Fluiddrucks, insbesondere eines Differenzdrucks und/oder einer Temperatur, beispielsweise einer Förderfluidtemperatur oder einer Lagertemperatur. Auch kann es sich um einen Drehzahlmesser zur Bestimmung der Verdrängerpumpenzahl und/oder um einen Drehmomentmesser zum Erfassen des Verdrängerpumpenmotordrehmoments und/oder um ein Vibrationssensor zum Messen eines Vibrationswertes und/oder um einen Fluidviskositätsmesser zum Bestimmen der Fluidviskosität und/oder einen Leckageratenmesser und/oder einen Volumenstrommesser handeln. Besonders zweckmäßig ist es, wenn die Steuermittel signalleitend mit dem Frequenzumrichter verbunden sind, um als ersten und/oder mindestens einen weiteren Ist-Betriebsparameter eine Ist-Hilfsstellgröße zu empfangen, insbesondere einen Drehfrequenzsollwert oder einen Drehmomentsollwert aus dem Frequenzumformer.The system preferably also comprises at least one sensor (sensor means), preferably at least two sensors, which are connected to the control means in signal-conducting fashion, the sensor or the sensors for measuring the first actual operating signal and possibly at least one further actual sensor. Operating signal is formed and arranged. For example, it is a pressure sensor for determining a fluid pressure, in particular a differential pressure and / or a temperature, for example a delivery fluid temperature or a storage temperature. It may also be a tachometer for determining the Verdrängerpumpenzahl and / or a torque meter for detecting the Verdrängerpumpenmotordrehmoments and / or a vibration sensor for measuring a vibration value and / or a fluid viscosity meter for determining the fluid viscosity and / or a Leckageatenmesser and / or Volumetric flow meter act. It is particularly expedient if the control means are signal-connected to the frequency converter in order to receive an actual auxiliary manipulated variable as the first and / or at least one further actual operating parameter, in particular a rotational frequency setpoint or a torque setpoint from the frequency converter.
In Weiterbildung der Erfindung ist mit Vorteil vorgesehen, dass die Logik des Steuermoduls zum Erkennen und/oder Signalisierung einer Wartungsnotwendigkeit des Pumpenmoduls ausgebildet ist und zwar in Abhängigkeit der Auswertung eines Ist-Betriebsparameters, welcher ggf. von der Logik im Hinblick auf eine Wartungsrelevanz, insbesondere unter Einbezug einer Datenbank überprüfbar ist. Besonders zweckmäßig ist es, wenn die Logik derart ausgebildet bzw. programmiert ist, dass eine Wartungsnotwendigkeit ausreichende Zeit vor einem tatsächlich notwendigen Eingriff erkannt wird, um somit eine Frist bzw. einen Zeitraum bis zur empfohlenen Vornahme der Wartungsdurchführung ermitteln zu können. Wie später noch erläutert werden wird, wird die Wartungsnotwendigkeit bzw. die empfohlene Zeitspanne bis zur Vornahme der Wartung im Falle des Vorsehens mehrerer Steuermodule von einer, sogenannten Masterbox der Steuermodule übernommen. Die Kommunikation mit dieser Masterbox kann beispielsweise über ein Bussystem, insbesondere ein CAN-Bussystem erfolgen.In a further development of the invention is advantageously provided that the logic of the control module is designed to detect and / or signaling a maintenance need of the pump module, depending on the evaluation of an actual operating parameter, which, if necessary, of the logic in terms of maintenance relevance, in particular is verifiable with the inclusion of a database. It is particularly expedient if the logic is designed or programmed in such a way that a need for maintenance is detected in sufficient time before an intervention actually required in order to be able to determine a period or a period until the recommended implementation of the service implementation. As will be explained later, the maintenance requirement or the recommended period until the maintenance is carried out in the case of providing several control modules of a, so-called master box of the control modules. The communication with this master box can take place, for example, via a bus system, in particular a CAN bus system.
Wie zuvor bereits angedeutet, ist es besonders zweckmäßig, wenn dem Steuermodul zur Kommunikation mit einer Leitwarte und/oder mit einem weiteren Steuermodul und/oder mit einem Sensormodul ein Bussystem zugeordnet ist bzw. dass das Steuermodul an ein solches Bussystem angeschlossen ist. Überraschenderweise hat sich ein aus der Automobiltechnik bekanntes CAN-Bussystem als besonders Vorteilhaft, zuverlässig und robust im Zusammenhang mit einem Pumpen-System herausgestellt. Das bevorzugt vorgesehene Sensormodul kann alternativ auch über eine Digitalverbindung und/oder Analogverbindung mit dem Steuermodul und/oder einer Leitwarte kommunizieren.As already indicated above, it is particularly expedient if the control module is associated with a control system for communicating with a control room and / or with a further control module and / or with a sensor module or that the control module is connected to such a bus system. Surprisingly, a known from the automotive industry CAN bus system has been found to be particularly advantageous, reliable and robust in connection with a pump system. The preferred provided sensor module may alternatively communicate via a digital connection and / or analog connection with the control module and / or a control room.
Besonders zweckmäßig ist es, wenn an das vorgenannte Bussystem mehrere Steuermodule angeschlossen sind, wobei bevorzugt jedem Steuermodul ein Verdrängerpumpenmodul und in der Folge auch ein Antriebsmodul zugeordnet ist.It is particularly useful if a plurality of control modules are connected to the aforementioned bus system, wherein preferably each control module is associated with a displacement pump module and in consequence a drive module.
Wie ebenfalls bereits angedeutet, ist es bevorzugt, wenn eines von mehreren zum Einsatz kommenden Steuermodulen als sogenannte Masterbox ausgebildet ist, d.h. eine erhöhte Funktionalität hat. Hierunter wird verstanden, dass dieses Steuermodul zum Empfangen und Speichern von Daten ausgebildet ist, die es von anderen Steuermodulen des Systems empfängt, beispielsweise von Statusinformationen und/oder von Systemistparametern (Ist-Betriebsparameter) und/oder von Drehzahlsollsignalen und/oder von Systemsollparametern. Bevorzugt ist eine derartige Masterbox zusätzlich oder alternativ mit Signalisierungsmitteln, beispielsweise einem Bildschirm, einer Lichter-, insbesondere LED-Ampel, und/oder einem Lautsprecher ausgestattet, um mit einem Benutzer kommunizieren zu können bzw. um dem Benutzer ein Ereignis signalisieren zu können, beispielsweise eine Störung und/oder die Notwendigkeit einer Wartung, ggf. inklusive eines vorgeschlagenen Wartungszeitraums bis zur tatsächlichen Fälligkeit der Wartung.As also already indicated, it is preferred if one of a plurality of control modules used is designed as a so-called master box, ie has an increased functionality. This is understood to mean that this control module is designed to receive and store data that it receives from other control modules of the system, for example, status information and / or from Systemist parameters (actual operating parameters) and / or speed setpoint signals and / or system setpoint parameters. Preferably, such a master box additionally or alternatively with signaling means, such as a screen, a lights, in particular LED traffic lights, and / or a speaker equipped to communicate with a user or to signal the user an event can, for example a fault and / or the need for maintenance, including, if applicable, a suggested maintenance period until the actual due date of the maintenance.
Im Hinblick auf die Ausbildung des mindestens einen Sensormoduls gibt es unterschiedliche Möglichkeiten. Dieses kann beispielsweise als Vibrationssensor, insbesondere zum Erkennen kritischer Schwingungen des Pumpenmoduls und/oder mit einem Drucksensor zum Erfassen eines Istdruckes und/oder als Temperatursensor zum Ermitteln einer Isttemperatur und/oder als Durchflussmengensensor zum Erfassen eines Istdurchflusses und/oder als Drehmomentsensor zum Erfassen eines Drehmoments des Pumpenmoduls ausgebildet sein. Es ist denkbar, mehrere derartige Sensoren in einem Sensormodul zusammenzufassen oder für unterschiedliche Sensoren separate Sensormodule vorzusehen. Das Sensormodulsignal kann beispielsweise unmittelbar dem Steuermodul zugeleitet werden, oder falls vorhanden über die Leitwarte.With regard to the design of the at least one sensor module, there are different possibilities. This can be, for example, as a vibration sensor, in particular for detecting critical oscillations of the pump module and / or with a pressure sensor for detecting an actual pressure and / or as a temperature sensor for determining an actual temperature and / or as a flow rate sensor for detecting an Istdurchflusses and / or as a torque sensor for detecting a torque be formed of the pump module. It is conceivable to combine a plurality of such sensors in a sensor module or to provide separate sensor modules for different sensors. The sensor module signal can for example be fed directly to the control module, or if available via the control room.
Besonders zweckmäßig ist es, wenn in dem Steuermodul eine Datenbank mit systemspezifischen Informationen, insbesondere pumpenmodulspezifischen Informationen, vorgesehen ist, auf die die Logik des Steuermoduls zugreifen kann, um so eine geeignete Solldrehzahl und/oder einen geeigneten Systemsollparameter für den Regler des Steuermoduls vorgeben zu können.It is particularly expedient if a database with system-specific information, in particular pump-module-specific information, is provided in the control module, which can be accessed by the logic of the control module so as to be able to specify a suitable setpoint speed and / or a suitable system setpoint parameter for the controller of the control module ,
Die Erfindung führt auch auf die Verwendung eines Steuermoduls, umfassend einer Logik und einen Regler, insbesondere einen PI- oder PID-Regler, zum Erzeugen einer Stellgröße, insbesondere eines Drehzahlsollsignals für eine Antriebseinheit in Abhängigkeit mindestens eines System-Istparameters und in Abhängigkeit einer Führungsgröße, wobei die Führungsgröße vorzugsweise von einer Leitwarte vorgebbar ist.The invention also leads to the use of a control module comprising a logic and a controller, in particular a PI or PID controller, for generating a manipulated variable, in particular a speed setpoint signal for a drive unit as a function of at least one system actual parameter and as a function of a reference variable, wherein the reference variable is preferably predetermined by a control room.
Weitere Vorteil, Merkmale und Einzelheiten der Erfindung ergeben sich aus der nachfolgenden Beschreibung bevorzugter Ausführungsbeispiele sowie anhand der Zeichnungen. Diese zeigen in:
- Fig. 1:
- einen möglichen Aufbau eines Pumpensystems mit zwei Steuermodulen, denen jeweils ein Antriebsmodul und ein Pumpenmodul zugeordnet ist, wobei den beiden Steuermodulen eine fakultative Leitwarte übergeordnet ist,
- Fig. 2 bis Fig. 5:
- unterschiedliche Ereignisszenerien am Beispiel des Pumpen-Systems gemäß
Fig. 1 , und - Fig. 6:
- eine mögliche Ausgestaltung von als Steuermodul vorliegenden Steuermitteln, die ausgebildet sind, um eine von einem Regler erzeugte Stellgröße mit einem ersten (Pumpenschutz-)Grenzwert zu vergleichen, insbesondere für ein System gemäß den
Fig. 1 ,bis 5 - Fig. 7:
- eine alternative Ausgestaltung von als Steuermodul vorliegenden Steuermitteln, die ausgebildet sind um eine vom Regler erzeugte Stellgröße mit einem (Förderfluidschutz-)Grenzwert zu vergleichen, insbesondere für ein System gemäß
Fig. 1 ,bis 5 - Fig. 8.
- eine weitere Ausgestaltungsvariante von als Steuermodul vorliegenden Steuermitteln für ein Verdrängerpumpensystem, wie dies beispielhaft in den
Fig. 1 dargestellt ist, wobei von den Steuermitteln die vom Regler erzeugte Stellgröße mit einem ersten Grenzwert und/oder einem zweiten Grenzwert zu vergleichbar und ggf. korrigierbar ist, und wobei die Vergleichsreihenfolge auch anders, als inbis 5Fig. 8 dargestellt, d.h. in umgekehrter Reihenfolge realisiert sein kann, - Fig. 9:
- ein NPSH-Diagramm, und
- Fig. 10
- in einem Diagramm den physikalischen Zusammenhang zwischen dem Förderfluiddruck, gemessen am Druckstutzen der Pumpe, der Förderfluidviskosität (Mediumviskosität) und der Pumpendrehzahl, hier einer Pumpenmindestdrehzahl.
- Fig. 1:
- a possible construction of a pump system with two control modules, to each of which a drive module and a pump module is assigned, wherein the two control modules are superordinated to an optional control room,
- 2 to 5:
- different event scenarios using the example of the pump system according to
Fig. 1 , and - Fig. 6:
- a possible embodiment of the control module present as control module, which are designed to compare a manipulated variable generated by a controller with a first (pump protection) limit, in particular for a system according to the
Fig. 1 to 5 . - Fig. 7:
- an alternative embodiment of present as a control module control means which are designed to compare a control variable generated by the controller with a (Förderfluidschutz-) limit, in particular for a system according to
Fig. 1 to 5 . - Fig. 8.
- a further embodiment variant of present as a control module control means for a positive displacement pump system, as exemplified in the
Fig. 1 to 5 is represented by the control means, the control variable generated by the controller with a first threshold and / or a second threshold to be comparable and possibly correctable, and wherein the comparison order also different, as inFig. 8 represented, that can be realized in reverse order, - Fig. 9:
- an NPSH diagram, and
- Fig. 10
- in a diagram, the physical relationship between the delivery fluid pressure, measured at the discharge nozzle of the pump, the delivery fluid viscosity (medium viscosity) and the pump speed, here a minimum pump speed.
In den Figuren sind gleiche Elemente und Elemente mit der gleichen Funktion mit den gleichen Bezugszeichen gekennzeichnet.In the figures, like elements and elements having the same function are denoted by the same reference numerals.
Das in den Figuren gezeigte Verdrängerpumpensystem 1 umfasst ein erstes und ein zweites Steuermodul 202, 203, von denen das in der Zeichnung links gezeigte Steuermodul (erstes Steuermodul 202) als sogenannte Masterbox mit Signalisierungsmitteln 204 ausgestattet ist und zwar in Form eines Bildschirms 205 und einer LED-Ampel 6.The
Neben den Signalisierungsmitteln 204 ist das erste Steuermodul 202 (Masterbox) im Gegensatz zu dem zweiten Steuermodul 203 als Datenspeichereinheit (Datenlogger) ausgebildet, die signalleitend mit dem zweiten Steuermodul 203 verbunden ist und von dieser übermittelte Daten, beispielsweise wie Ist-Betriebsparameter, Führungsgrößen oder vorgegebene Drehzahlen speichert und bevorzugt mit einem Zeitcode versieht. Die Signalisierungsmittel 204 dienen zum Signalisieren von Steuerungen oder zur Darstellung von Wartungsnotwendigkeiten bzw. Zeitvorschlägen zur Durchführung der Wartung, die von dem ersten Steuermodul 202 und/oder dem zweiten Steuermodul 203 oder gegebenenfalls weiteren, nicht dargestellten Steuermodulen ermittelt werden.In contrast to the
Dem ersten Steuermodul 202 ist ein Antriebsmodul 207 zugeordnet, umfassend einen elektrischen, hier als Asynchronmotor ausgebildeten Antriebsmotor 3 sowie einen diesem zugeordneten Frequenzumrichter 4, der lediglich zur besseren Darstellung separat dargestellt und bevorzugt unmittelbar am Antriebsmotor 3 angeordnet ist.The
Das Antriebsmodul 207, genauer der Antriebsmotor 3 des Antriebsmoduls 207 ist über eine Kupplung 210 mit einem als Schraubenspindelpumpe ausgebildeten ersten Pumpenmodul 211 wirkverbunden.The
Am ersten Pumpenmodul 211 ist ein Sensormodul 212 zum Erfassen eines Ist-Betriebsparameters X angeordnet, welches in dem gezeigten Ausführungsbeispiel mit einem Vibrationssensor ausgestattet ist, um unzulässige Vibrationen erfassen zu können, die dann vom ersten Steuermodul 202, genauer von integralen Logikmitteln 7 ausgewertet werden, insbesondere durch Vergleich mit in einer integralen Datenbank des Steuermoduls 202 abgelegten Informationen.At the
Wie sich aus
Im ersten Steuermodul 202 sind, bereits erwähnte, nicht dargestellte Logikmittel 7 integriert sowie ein in dem gezeigten Ausführungsbeispiel als PID-Regler ausgebildeter, ebenfalls aus Übersichtlichkeitsgründen nicht dargestellter Regler 6 zum Erzeugen einer später noch zu erläuternden Stellgröße oder einer korrigierten Stellgröße für den ersten Frequenzumrichter 4, der nicht ausgebildet ist oder alternativ nicht genutzt bzw. angesteuert und/oder mit Systemistparametern versorgt ist um in Abhängigkeit eines Drucksignals und/oder eines Durchflussmengensignals und/oder eines Vibrationssensorsignals und/oder eines Temperatursensorsignals und/oder eines Drehmomentsignals selbst ein Drehzahlsollsignal zu erzeugen.In the
Das erste Steuermodul 202 weist, wie das zweite Steuermodul 203 mehrere Ein- und Ausgänge auf, die beim ersten Steuermodul 202 zur besseren Visualisierung hervorgehoben dargestellt sind. Das erste Steuermodul 202 umfasst Analogeingänge 214, über einen von denen das erste Steuermodul 202 signalleitend mit einer übergeordneten Leitwarte (Führungsgrößenvorgabemittel 8) verbunden ist. Über eine, hier als Analogverbindung 216 ausgebildete Verbindung kann von der Leitwarte eine Führungsgröße W oder alternativ bereits eine Stellgröße übermittelt werden, wobei letztere beispielsweise durch das erste Steuermodul 202 durchgeschleift wird und über einen von bevorzugt mehreren, Analogausgängen 217 zum ersten Frequenzumrichter 4 geleitet wird. Wie später noch erläutert werden wird ist das erste Steuermodul 202 jedoch auch in der Lage selbstständig eine Stellgröße, insbesondere ein Drehzahlsollsignal in Abhängigkeit einer Führungsgröße W, eines Ist-Betriebsparameters X und mindestens eines weiteren Betriebsparameters zu erzeugen, mit welcher der erste Frequenzumrichter 4 angesteuert wird.The
Neben den Analogeingängen 214 existieren mehrere Digitaleingänge 218.In addition to the
Darüber hinaus existieren mehrere Digitalausgänge 219 über die Statussignale und andere Daten an die Leitwarte übermittelt werden können.In addition, there are several
Zu erkennen ist, dass das erste Steuermodul 202 über das Bussystem 213 nicht nur mit dem Sensormodul 212 kommuniziert bzw. Daten von diesem empfängt, sondern über das als CAN-Bussystem ausgebildete Bussystem 213 auch mit dem zweiten Steuermodul 203 verbunden ist. Dieses umfasst wie das erste Steuermodul 202 (zweite) Digitalausgänge 220, (zweite) Digitaleingänge 221, (zweite) Analogeingänge 222 sowie (zweite) Analogausgänge 223 zum Übermitteln eines von der Leitwarte vorgegebenen oder von dem zweiten Steuermodul 203 in Abhängigkeit einer von der Leitwarte vorgegebenen Führungsgröße erzeugten Stellgröße an dem nicht separat dargestellten Frequenzumrichter eines zweiten Antriebsmoduls 224, welches über eine zweite Kupplung 225 wirkverbunden ist mit einem zweiten ebenfalls als Verdrängerpumpe ausgebildeten zweiten Pumpenmodul 226, an welchem ebenfalls ein zweites Sensormodul 227 angeordnet ist. welches über das Bussystem 213 mit dem zweiten Steuermodul 203 kommuniziert.It can be seen that the
Über eine Digitalverbindung 228 kann die Leitwarte (Beispiel für Führungsgrößenvorgabemittel 8) dem zweiten Steuermodul 203 ein Motorein- sowie ein Motoraussignal übermitteln, aufgrund dessen das zweite Steuermodul 203 das Antriebsmodul 224 ansteuert.Via a
Anstelle der dargestellten, als Vibrationssensormodule ausgebildeten Sensormodule 212, 227 können zusätzlich oder alternativ weitere Sensoren bzw. Sensormodule mit jeweils einem oder mehreren Sensoren vorgesehen sein, um verschiedenste Systemistparameter im Bereich des jeweiligen Pumpenmoduls 211, 226 zu erfassen.Instead of the illustrated
Zum Auslesen und/oder Programmieren kann ein Computer 229 vorgesehen werden, der bevorzugt über das Bussystem 213 mit den Steuermodulen 202, 203 kommuniziert.For reading out and / or programming, a
Wie sich aus
Im Folgenden werden anhand der
Bei dem in
Bei einem zweiten, in
Das in
Bei dem in
Im Folgenden werden anhand der
Die anhand der
In
Zur Generierung der Stellgröße YS oder einer korrigierten Stellgröße Y'S umfasst das Verdrängerpumpensystem 1, beispielsweise von einem Mikrokontroller gebildete Steuermittel 5, umfassend einen zuvor erwähnten Regler 6 sowie Logikmittel 7. Die Steuermittel 5 liegen als von dem Antriebsmodul 207 separates Steuermodul 202 mit eigenem Gehäuse vor.To generate the manipulated variable Y S or a corrected manipulated variable Y ' S comprises the
Den Steuermitteln 5 sind vorzugsweise von diesem separate Führungsgrößenvorgabemittel 8 vorgeordnet, beispielsweise eine Prozessleitwarte, die die Steuermittel 5 mit einer Führungsgröße W versorgen, beispielsweise ein einen Sollvolumenstrom oder einen Solldruck repräsentierendes elektrisches Spannungssignal.The control means 5 are preferably preceded by this
Die Führungsgröße W sowie ein von außen zugeführter erster Ist-Betriebsparameter X werden dem Regler 6, genauer einem Differenzbildner 9 des Reglers 6 zugeführt, welcher die Differenz X-W berechnet. Der eigentliche, beispielsweise als PI- oder PID-Regler ausgeführte Regler 6 bestimmt also auf Basis der Führungsgröße W und des ersten, hier gemessenen Ist-Betriebsparameters X eine Stellgröße YS. Diese wird nicht wie im Stand der Technik unmittelbar dem Frequenzumrichter 4 zugeleitet, sondern durchläuft zunächst Logikmittel 7. Diese umfassen in dem gezeigten Ausführungsbeispiel erste Vergleichsmittel 10, die die vom Regler 6 erzeugte Stellgröße YS mit mindestens einem ersten Grenzwert vergleichen, vorzugsweise einen maximalen einzuhaltenden ersten Grenzwert YGrenzmax und/oder einen minimalen einzuhaltenden Grenzwert YGrenzmin. Anstelle eines unmittelbaren Vergleiches der Stellgröße YS mit dem mindestens einen ersten Grenzwert kann mit Hilfe von nicht dargestellten (fakultativen) Vergleichswertvorgabemitteln auf Basis der Stellgröße YS ein mit der Stellgröße YS in einem funktionalen Zusammenhang stehender Vergleichswert berechnet werden, in dessen Berechnung gemäß einem funktionalen Zusammenhang auch mindestens ein Ist-Betriebsparameter, beispielsweise der erste Ist-Betriebsparameter X und mindestens ein weiterer, später noch zu erläuternder weiterer Ist-Betriebsparameter einfließen kann. Auch können die Vergleichswertvorgabemittel gemäß einem funktionalen Zusammenhang zur Berechnung des Vergleichswertes mindestens einen Geometrieparameter der Verdrängerpumpe und/oder einen Förderfluidparameter berücksichtigen, der bzw. die dann auch bei der Berücksichtigung des Grenzwertes weitere Berücksichtigung finden müssen. In dem gezeigten Ausführungsbeispiel wird dieser zusätzliche Vergleichswertberechnungsschritt jedoch eingespart und es wird unmittelbar die Stellgröße YS mit mindestens einem ersten Grenzwert YGrenzmax und/oder YGrenzmin verglichen, wobei der mindestens eine erste Grenzwert einen Verdrängerpumpenschutzgrenzwert darstellt, dessen Über- bzw. Unterschreiten einen Defekt der Verdrängerpumpe zur Folge hat oder haben könnte.The reference variable W and an externally supplied first actual operating parameter X are supplied to the
Den Vergleichsmitteln 10 ist eine erste Funktionseinheit 11 zugeordnet, die neben ersten Grenzwertvorgabemitteln 12 erste Korrekturmittel 13 beinhaltet. Die Funktionseinheit 11 berechnet den mindestens einen ersten Grenzwert YGrenzmax, YGrenzmin der den Vergleichsmitteln 10 neben der vom Regler 6 erzeugten Stellgröße YS zugeführt wird. Die Vergleichsmittel überprüfen nun, ob die Stellgröße YS einen maximalen ersten Grenzwert YGrenzmax unterschreitet und/oder ob die Stellgröße YS einen minimalen ersten Grenzwert YGrenzmin überschreitet. Falls dies der Fall ist, handelt es sich bei der Stellgröße YS um eine zulässige, die Verdrängerpumpe nicht gefährdende Stellgröße, die weiteren nicht dargestellten Vergleichen und Korrekturroutinen zugeführt werden kann oder wie dargestellt unmittelbar als Eingangssignal dem Frequenzumrichter 4 der auf dieser Basis den Verdrängerpumpenmotor 3 ansteuert.The comparison means 10 is associated with a first functional unit 11, which includes first correction means 13 in addition to first limit value specification means 12. The functional unit 11 calculates the at least one first limit value Y Grenzmax , Y Grenzmin of the comparison means 10 is supplied in addition to the manipulated variable Y S generated by the
Zur Berechnung des mindestens einen ersten Grenzwertes wird der ersten Funktionseinheit 11 der erste Ist-Betriebsparameter X zugeführt und ein weiterer gemessener oder berechneter Ist-Betriebsparameter YH und/oder XH, wobei es sich bei dem Ist-Betriebsparameter YH in dem gezeigten Ausführungsbeispiel um eine Hilfsstellgröße des Frequenzumrichters handelt, beispielsweise um einen Drehfrequenzsollwert oder einen Drehmomentsollwert des Frequenz-umrichters. Hierbei handelt es sich nicht um gemessene Werte, sondern anhand mindestens eines Ist-Parameters, beispielsweise auf Basis einer aktuellen Steuermessung vom Frequenzumrichter berechnete, insbesondere simulierte Werte. Bei dem weiteren Ist-Betriebsparameter XH handelt es sich in dem gezeigten Ausführungsbeispiel um eine Hilfsregelgröße, beispielsweise einen Motor- und/oder Verdrängerpumpendrehzahl oder ein Drehmoment, die bevorzugt unmittelbar am Motor 3 gemessen werden. In jedem Fall wird also von den ersten Grenzwertvorgabemitteln 12 zur Berechnung des mindestens einen Pumpenschutz-Grenzwertes ein Betriebsparameter, also beispielsweise der erste Ist-Betriebsparameter, hier der Istwert der Regelgröße aus der Prozessregelstrecke 14 berücksichtigt und mindestens ein weiterer Ist-Betriebsparameter YH, XH oder eine, bevorzugt gemessene Hauptstellgröße YHH für die Prozessregelgröße X, beispielsweise ein Druck oder ein Volumenstrom.To calculate the at least one first limit value, the first actual operating unit 11 is supplied with the first actual operating parameter X and another measured or calculated actual operating parameter Y H and / or X H , wherein the actual operating parameter Y H in the exemplary embodiment shown is an auxiliary manipulated variable of the frequency converter, for example, a rotational frequency setpoint or a torque setpoint of the frequency converter. These are not measured values, but based on at least one actual parameter, for example based on a current control measurement calculated by the frequency converter, in particular simulated values. In the exemplary embodiment shown, the further actual operating parameter X H is an auxiliary control variable, for example an engine and / or positive displacement pump speed or a torque, which are preferably measured directly on the
Für den Fall, dass von den Vergleichsmitteln ein Überschreiten des maximalen ersten Grenzwertes YGrenzmax und/oder ein Unterschreiten des minimalen ersten Grenzwertes YGrenzmin festgestellt wird, wird dies an die erste Funktionseinheit 11 gemeldet, deren erste Korrekturmittel 13 dann eine korrigierte Stellgröße Y'S ermitteln unter Berücksichtigung des ersten Ist-Betriebsparameters X und eines der vorgenannten weiteren Ist-Betriebsparameter YH, XH, YHH. Diese korrigierte Stellgröße Y'S kann dann, wie dargestellt den Vergleichsmitteln als Eingangsgröße zum Vergleichen mit einem ersten Grenzwert YGrenzmax und/oder YGrenzmin zugeleitet werden oder unter Umgehung der Vergleichsmittel (nicht dargestellt) einem weiteren Vergleichs- und Korrekturprozedere oder unmittelbar dem Frequenzumrichter 4 als Eingangssignal.In the event that an exceeding of the maximum first limit value Y Grenzmax and / or a falling below the minimum first limit value Y Grenzmin is detected by the comparison means, this is reported to the first function unit 11, the first correction means 13 then a corrected manipulated variable Y 'S determine taking into account the first actual operating parameter X and one of the aforementioned further actual operating parameters Y H , X H , Y HH . This corrected manipulated variable Y ' S can then, as shown, be fed to the comparison means as an input variable for comparison with a first limit value Y Grenzmax and / or Y Grenzmin or bypassing the Comparison means (not shown) a further comparison and correction procedure or directly the
Aus einem, bevorzugt nicht flüchtigen Speicher 19 können den ersten Grenzwertvorgabemitteln 12 und/oder den ersten Korrekturmitteln 13 für die den Steuermitteln 5 zugeordnete Verdrängerpumpe spezifische Geometrieparameter GP und/oder für das Förderfluid spezifische Förderfluidparameter FP, wie beispielsweise des Scherverhalten des Förderfluids, zugeleitet werden, die im Rahmen eines funktionellen Zusammenhangs Eingang finden in die Berechnung der ersten Grenzwerte YGrenzmax, YGrenzmin, und/oder der korrigierten Stellgröße Y'S.From a preferably
In dem gezeigten Ausführungsbeispiel handelt es sich bei der korrigierten Stellgröße Y'S um den maximal oder minimal zulässigen ersten Grenzwert YGrenzmax, YGrenzmin, um der vom Regler erzeugten Stellgröße YS möglichst nahezukommen. Insofern beinhalten die ersten Grenzwertvorgabemittel 12 und die ersten Korrekturmittel 13 einen gemeinsamen Rechner (Rechnermittel), da die korrigierte Stellgröße Y'S in dem gezeigten Ausführungsbeispiel einen ersten Grenzwert YGrenzmax, YGrenzmin entspricht. Die vom Regler erzeugte Stellgröße YS wird mit der korrigierten Stellgröße Y'S überschrieben.In the exemplary embodiment shown, the corrected manipulated variable Y ' S is the maximum or minimum permissible first limit value Y Grenzmax , Y Grenzmin , as close as possible to the manipulated variable Y S generated by the controller. In this respect, the first limit value specification means 12 and the first correction means 13 include a common computer (computer means), since the corrected manipulated variable Y ' S in the embodiment shown corresponds to a first limit value Y limit max , Y limit min . The manipulated variable Y S generated by the controller is overwritten with the corrected manipulated variable Y ' S.
Insbesondere dann, wenn die korrigierte Stellgröße Y'S nicht dem ersten Grenzwert entsprechen soll, können die ersten Korrekturmittel 13 und die ersten Grenzwertvorgabemittel 12 vollständig separat, d.h. mit eigenen Rechenmitteln, d.h. in voneinander getrennten Funktionseinheiten realisiert werden. Dies ist selbstverständlich auch für den davor dargelegten Fall möglich, dass die korrigierte Stellgröße Y'S einen ersten Grenzwert entsprechen soll, wobei in diesem Fall, wie in
Im Folgenden wird das Ausführungsbeispiel gemäß
Der erste Ist-Betriebsparameter X entspricht der Ist-Regelgröße, in dem gezeigten Ausführungsbeispiel ein Druck, gemessen in bar. Es wird angenommen, dass die Führungsgröße X ein Druck ist und zunächst 20 bar beträgt. Ebenso wird der Ist-Betriebsparameter X als 20 bar gemessen.The first actual operating parameter X corresponds to the actual controlled variable, in the exemplary embodiment shown a pressure, measured in bar. It is assumed that the reference variable X is a pressure and is initially 20 bar. Likewise, the actual operating parameter X is measured as 20 bar.
Nun erfolgt eine Führungsgrößenänderung. Die Führungsgröße X ändert sich beispielsweise durch eine entsprechende Vorgabe von 20 bar auf 10 bar. Hieraus resultiert eine Regelabweichung W-X = 10 bar.Now a command value change takes place. The reference variable X changes, for example, by a corresponding specification from 20 bar to 10 bar. This results in a control deviation W-X = 10 bar.
Der Regler 6 ermittelt eine neue Stellgröße YS, in diesem Fall einen drehzahlproportionalen Spannungswert, der deutlich kleiner ist, als bei einem vorhergehenden Durchlauf bzw. bei einer vorhergehenden Berechnung. Die ersten Grenzwertvorgabemittel 12 berechnen einen minimal zulässigen Grenzwert YGrenzmin. Dieser repräsentiert in dem gezeigten Ausführungsbeispiel eine minimal zulässige Drehzahl. Das Einhalten einer minimal zulässigen Drehzahl ist wünschenswert, um die Gefahr eines Schmiermittelabrisses bei einem Unterschreiten dieser minimal zulässigen Drehzahl zu vermeiden.The
Die minimal zulässige Drehzahl, d.h. der minimal zulässige Grenzwert YGrenzmin wird berechnet anhand des folgenden funktionalen Zusammenhangs: 
In dem funktionalen Zusammenhang entspricht YGrenzmax dem mimimal zulässigen Grenzwert. Hierbei handelt es sich um eine minimal zulässige Drehzahl (nzulässig).In the functional context, Y Grenzmax corresponds to the minimum permissible limit value. This is a minimum permissible speed (n permissible ).
Der erste Ist-Betriebsparameter X ist in dem Fall die gemessene Regelgröße, hier der neue Ist-Druck von 10 bar. Bei dem Faktor • α handelt es sich um einen weiteren Betriebsparameter, nämlich um ein Maß für die, insbesondere über eine Temperaturmessung des Förderfluids bestimmte, Betriebsviskosität des Förderfluids bzw. für die Einflusssituation der Viskosität auf den maximal zulässigen Druck. Dieser Wert beträgt in dem gezeigten Ausführungsbeispiel 100,32 für das bestimmte Medium. Bei der Konstante k handelt es sich um den Korrekturwert für die Schmierfähigkeit des Mediums, dieser beträgt beispielhaft 0,75 für das bestimmte Medium.The first actual operating parameter X is in this case the measured controlled variable, here the new actual pressure of 10 bar. The factor • α is a further operating parameters, namely a measure for the, in particular via a temperature measurement of the conveying fluid certain operating viscosity of the fluid or for the situation influence of viscosity on the maximum allowable pressure. This value is 10 0.32 for the particular medium in the embodiment shown. The constant k is the correction value for the lubricity of the medium, this is exemplified by 0.75 for the particular medium.
Bei der Konstante b handelt es sich um einen Korrekturwert für die Tribobelastungsfähigkeit des Pumpenlaufgehäuses. Dieser beträgt in dem gezeigten Ausführungsbeispiel 1. Bei dem pumpenspezifischen Kennwert c handelt es sich um einen Kennwert für den radial belasteten Rotordurchmesser. Dieser beträgt beispielsweise in dem gezeigten Ausführungsbeispiel 0,55.The constant b is a correction value for the tribocharging capability of the pump casing. This is in the illustrated
Der minimal zulässige Grenzwert YGrenzmin wird den ersten Vergleichsmitteln 10 zugeführt, welche die vom Regler 6 ermittelte Stellgröße YS mit diesem vergleichen. In Abhängigkeit des Vergleichs wird entweder die vom Regler ermittelte Stellgröße YS an den Frequenzumrichter übermittelt oder es wird von den ersten Korrekturmitteln eine korrigierte Stellgröße Y'S ermittelt, welche bevorzugt den zuvor berechneten (oder einem neu berechneten) minimal zulässigen Grenzwert YGrenzmin entspricht.The minimum permissible limit value Y Grenzmin is supplied to the first comparison means 10 which compare the manipulated variable Y S determined by the
Der erste Ist-Betriebsparameter X entspricht der Ist-Regelgröße, hier einem Druck. Gemessen wird ein Ist-Druck von 20 bar. Aufgrund einer entsprechenden Vorgabe ändert sich der Sollwert der Regelgröße, d.h. die Führungsgröße W von 20 auf 30 bar. Gleichzeitig findet eine Änderung der Störgröße statt. Es wird angenommen, dass sich der Strömungswiderstand erhöht, in Folge einer kleineren Durchströmfläche, d.h. eines kleineren Durchströmdurchmessers, beispielsweise in Folge eines Werkzeugwechsels.The first actual operating parameter X corresponds to the actual controlled variable, here a pressure. An actual pressure of 20 bar is measured. Due to an appropriate default, the setpoint of the controlled variable, i. the reference variable W from 20 to 30 bar. At the same time there is a change in the disturbance variable. It is believed that the flow resistance increases due to a smaller flow area, i. a smaller Durchströmdurchmessers, for example, as a result of a tool change.
Dies führt in der Praxis dazu, dass die Ist-Betriebsgröße X, d.h. der Ist-Druck die Führungsgröße W deutlich überschreiten wird, bzw. würde, da zunächst noch mit unveränderter Drehzahl gefördert wird und sich aber zwischenzeitlich der Strömungswiderstand aufgrund des Werkzeugwechsels deutlich erhöht hat.In practice, this results in the actual operating quantity X, i. the actual pressure will clearly exceed the reference variable W, or would, since initially with still unchanged speed is promoted and but in the meantime the flow resistance has increased significantly due to the tool change.
Die daraus entstehende Regelabweichung am Differenzbildnerausgang führt dann zu einer signifikanten Zurücknahme, d.h. Reduzierung der Stellgröße YS. Für den Fall, dass diese unkorrigiert an den Frequenzumrichter 4 als Sollvorgabe übermittelt würde, würde dies zu einer Gefährdung der Pumpe hinsichtlich des zulässigen Drucks bei verringerter niedriger Drehzahl resultieren. Um dies zu verhindern, wird die vorgenannte Stellgröße Ys mit dem zu berechenden minimalen Grenzwert YGrenzmin (erster Grenzwert) verglichen, welcher die minimal zulässige Drehzahl repräsentiert. Die Berechnung erfolgt anhand des im ersten Ausführungsbeispiel angegebenen funktionalen Zusammenhangs. Da die Stellgröße YS den minimal zulässigen Grenzwert YGrenzmin, d.h. die minimal zulässige Drehzahl unterschreitet, wird von den ersten Korrekturmitteln 13 eine korrigierte Stellgröße Y'S ausgegeben, die an Stelle der Stellgröße YS an den Frequenzumrichter übermittelt wird.The resulting control deviation at the subtractor output then leads to a significant withdrawal, ie reduction of the manipulated variable Y S. In the event that this uncorrected transmitted to the
Bevorzugt entspricht die korrigierte Stellgröße Y'S dem berechneten minimal zulässigen Grenzwert YGrenzmin.The corrected manipulated variable Y ' S preferably corresponds to the calculated minimum permissible limit value Y limit min .
Die Führungsgröße W ist ein Volumenstrom gemessen in l/min. Der erste Ist-Betriebsparameter X ist ein gemessener Volumenstrom. Es wird angenommen, dass sich während des Betriebs die Volumenstromanforderung vergrößert. In dem gezeigten Beispiel soll sich die Führungsgröße verdoppeln und zwar von 1500 l/min auf 3000 l/min. Aus der hieraus resultierenden Regelabweichung W-X bestimmt der Regler 6 eine Stellgröße YS, hier eine Drehzahl. Diese Stellgröße YS, d.h. die vom Regler 6 vorgegebene Drehzahl wird von den Vergleichsmitteln 10 verglichen mit einer maximal zulässigen Drehzahl, d.h. einem ersten Grenzwert YGrenzmax. Diese maximal zulässige Drehzahl wird bestimmt auf Basis des NPSHverfügbar, d.h. auf Basis des vorhandenen NPSH bzw. der Haltedruckhöhe der Anlage. Diese beträgt in dem gezeigten Ausführungsbeispiel 8 mWs (Meter Wassersäule). Auf Basis des NPSHverfügbar und einem weiteren, gemessenen Ist-Betriebsparameter, hier der Viskosität des Mediums, wird YGrenzmax, d.h. die maximal zulässige Drehzahl bestimmt. Dies erfolgt beispielhaft anhand des in ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Es kann also für eine Pumpe mit einer bestimmten Pumpenbaugröße, mit einem bestimmten Spindelsteigungswinkel und einem bestimmten NPSH-Wert eine zulässige Pumpendrehzahl nzul BG
Bei dem Diagramm gemäß
Zur Bestimmung des ersten Grenzwertes YGrenzmax, d.h. der maximal zulässigen Drehzahl muss in dem Diagramm ausgehend von einem NPSH von 8 mWs nach rechts verfahren werden, bis zu der für die gemessene Viskosität von 500 mm2/s charakteristisehe Kurve. Am Schnittpunkt mit dieser Kurve muss im Schaubild nach oben verfahren werden bis zu der linearen Linie. Im Schnittpunkt mit dieser Linie kann dann auf der rechten Hochachse die maximal zulässige Drehzahl d.h. der erste Grenzwert YGrenzmax abgelesen werden. Dieser beträgt für die gemessene Viskosität, d.h. den weiteren Ist-Betriebsparameter, etwa 3800 Umdrehungen/min.To determine the first limit value Y Grenzmax , ie the maximum permissible rotational speed, it is necessary to move to the right in the diagram, starting from an NPSH of 8 mWs, up to the characteristic value of 500 mm 2 / s for the measured viscosity Curve. At the intersection with this curve, the diagram must move up to the linear line. At the intersection with this line, the maximum permissible speed, ie the first limit value Y Grenzmax, can then be read on the right vertical axis. This is about 3800 revolutions / min for the measured viscosity, ie the other actual operating parameters.
Wie eingangs erwähnt, verdoppelt sich die Führungsgröße, d.h. der geforderte Volumenstrom, was aufgrund des linearen Zusammenhangs einer Stellgrößenänderung von den angenommenen 1500 1/min auf 3000 1/min beträgt. Da diese Stellgröße YS von 3000 1/min kleiner ist als der erste Grenzwert YGrenzmax von etwa 3800 1/min kann die Stellgröße YS an den Frequenzumrichter 4 als Eingangsgröße übermittelt werden.As mentioned above, the reference variable, ie the required volume flow doubles, which is 3000 l / min due to the linear relationship between a manipulated variable change from the assumed 1500 rpm. Since this manipulated variable Y S of 3000 1 / min is smaller than the first limit Y Grenzmax of about 3800 1 / min, the manipulated variable Y S can be transmitted to the
Würde sich die Führungsgröße nicht nur verdoppeln, sondern beispielsweise verdreifachen, würde hieraus eine Stellgröße von 4500 1/Minute resultieren, welche größer wäre als der erste Grenzwert YGrenzmax, so dass die Korrekturmittel 13 die vom Regler 6 vorgegebene Stellgröße YS durch eine korrigierte Stellgröße Y'S überschreiben würden, welche beispielsweise dem ersten Grenzwert, d.h. in dem vorliegenden Beispiel 3800 1/min entspricht.If the reference variable would not only double but triple, for example, this would result in a manipulated variable of 4500 1 / minute, which would be greater than the first limit value Y limit value, so that the correction means 13 will correct the manipulated variable Y S given by the
Das Ausführungsbeispiel gemäß
Der mindestens eine zweite Grenzwert YGrenzmax, YGrenzmin stellt die Einhaltung der Förderfluidqualität sicher. In dem gezeigten Ausführungsbeispiel wird von zweiten Grenzwertvorgabemitteln 15 ausschließlich ein einziger, maximaler zweiter Grenzwert YGrenz-max bereitgestellt, wobei alternativ auf mehrere zweite Grenzwerte, z.B. zusätzlich ein minimaler Grenzwert YGrenzmin, die die Förderfluidqualität sicherstellen berechnet werden können.The at least one second limit value Y Grenzmax , Y Grenzmin ensures compliance with the delivery fluid quality . In the exemplary embodiment shown, only a single, maximum second limit value Y limit-max is provided by second limit value specification means 15, wherein, alternatively, a plurality of second limit values, eg an additional one minimum limit Y limit min , which can be calculated to ensure the conveyed fluid quality .
Jedenfalls vergleichen zweite Vergleichsmittel 16, ob die vom Regler 6 erzeugte Stellgröße YS oder eine bereits in einem vorhergehenden, hier nicht umfassten weiteren Korrekturprozedere korrigierte Stellgröße den zweiten Grenzwert YGrenzmin um ein bestimmtes Maß überschreitet. Ist die Stellgröße YS kleiner als der oder gleich dem maximalen Grenzwert wird die vom Regler 6 erzeugte bzw. die den Vergleichsmitteln 16 zugeführte Stellgröße YS dem Frequenzumrichter 4 als Eingangsgröße bereitgestellt (berechnet).If compare each second comparison means 16 determines whether the manipulated variable generated by the controller 6 Y S or a corrected already in a preceding, not included here further correction procedure manipulated variable exceeds the second threshold value Y Grenzmin by a certain amount. If the manipulated variable Y S is less than or equal to the maximum limit value, the manipulated variable Y S generated by the
Ansonsten wird mit Hilfe von neben den zweiten Grenzwertvorgabemitteln 15 in einer zweiten Funktionseinheit 17 umfassten zweiten Korrekturmitteln 18 eine korrigierte Stellgröße Y'S bereitgestellt, mit der die Stellgröße YS überschrieben wird. Zur Berechnung des mindestens einen zweiten Grenzwertes YGrenzmin berücksichtigen die zweiten Grenzwertvorgabemittel 15 anhand eines funktionalen Zusammenhangs den ersten Ist-Betriebsparameter X und mindestens eines weiteren (anderen) Ist-Betriebsparameter, beispielsweise eine Hilfsstellgröße YH, eine Hilfsregelgröße XH und/oder eine Hautstellgröße YHH. Auch ist es realisierbar, dass bei der Berechnung zusätzlich Geometrieparameter GP der Verdrängerpumpe und/oder Förderfluidparameter FP, sowie die Vibration Berücksichtigung finden.Otherwise, with the aid of second correction means 18 included in a second
Das vierte Beispiel betrifft den Schutz des Mediums, d. h der zweite Grenzwert wird so bestimmt, dass aus der Stellgröße keine negative Beeinträchtigung eines Qualitätsparameters des mit der Verdrängerpumpe geförderten Förderfluids (Fördermediums) resultiert.The fourth example concerns the protection of the medium, i. The second limit value is determined such that the manipulated variable does not result in a negative impairment of a quality parameter of the delivery fluid (delivery medium) conveyed by the positive displacement pump.
In dem konkreten Beispiel soll sichergestellt werden, dass das Fördermedium nicht unzulässig geschert wird. In die Berechnung des zweiten Grenzwertes geht daher die maximal zulässige Scherrate des Mediums ein. Es soll wieder eine Drehzahlregelung realisiert werden, so dass der zweite Grenzwert einer maximal zulässigen Drehzahl entspricht. Dies bedeutet, dass der erste Betriebsparameter X ein Volumenstrom der Prozessstrecke ist. Neben der mediumspezifischen Grenze der maximal zulässigen Scherrate gehen in die Bestimmung des zweiten Grenzwertes Funktionsgegebenheiten der Pumpe ein, d.h. es finden Geschwindigkeitsverhältnisse Berücksichtigung, nämlich der Winkelgeschwindigkeitsunterschied der rotierenden Verdränger-Rotoren (Spindeln) gegenüber dem stillstehenden Pumpengehäuse. Die Geschwindigkeitsverhältnisse in den Spalten sind direkt proportional abhängig von der Pumpendrehzahl und es besteht ein umgekehrt direkt proportionaler Zusammenhang zu der Größe des Funktionsspaltes, d.h. zu dem jeweils aktuellen linearen Schergefälle. Dieser Funktionsspalt ist zum Einen abhängig von pumpenspezifischen Verhältnissen, nämlich von dem vorliegenden Ist-Radialspalt, d.h. von dem festegelegten Pumpenrotor-Radialspiel und zudem von aktuellen Betriebsverhältnissen, nämlich der jeweils aktuellen Druckbelastung des Förderfluids, sowie der jeweils aktuellen Viskosität des Förderfluids. Letztgenannte beiden weiteren Ist-Betriebsparameter werden gemessen und finden bei der Berechnung des zweiten Grenzwertes YGrenzmax, d.h. bei der Berechnung der maximal zulässigen Drehzahl Berücksichtigung.In the specific example, it should be ensured that the pumped medium is not sheared unduly. The maximum permissible shear rate of the medium is therefore included in the calculation of the second limit value. It should again be realized a speed control, so that the second limit corresponds to a maximum permissible speed. This means that the first operating parameter X is a volume flow of the process line. In addition to the medium-specific limit of the maximum permissible shear rate, the determination of the second limit value includes functional conditions of the pump, ie speed ratios are taken into account, namely the angular velocity difference of the rotating positive displacement rotors (spindles) relative to the stationary pump housing. The velocity ratios in the columns are directly proportional to the pump speed and there is an inversely directly proportional relationship to the size of the function gap, ie the actual linear shear rate. This functional gap is dependent on pump-specific conditions, namely on the actual radial gap, ie on the firmly set pump rotor radial clearance and also on current operating conditions, namely the current pressure load of the delivery fluid, as well as the current viscosity of the delivery fluid. The latter two further actual operating parameters are measured and are taken into account in the calculation of the second limit value Y Grenzmax , ie in the calculation of the maximum permissible rotational speed.
So wird beispielsweise ein Förderfluid mit einer dynamischen Viskosität η von 5 Pas gefördert. Dies entspricht einer kinematischen Viskosität v von 5000 mm2/s, wobei sich bei einer angenommenen Dichte ρ von 1000 kg/m3 unter Einhaltung einer maximal zulässigen Schubspannung τ von 100000 N/m2 ein maximal zulässiges Schergefälle Dzul von 20000 1/sec für das Förderfluid in einer bestimmten Pumpe ergibt. Diese ist charakterisiert durch einen Rotordurchmesser von Da=70mm und durch einen differenzdruckabhängigen Radialspalt S = h0, der bei Δp = 5 bar einen Wert von 0,021 mm ergibt. Hieraus ergibt sich eine maximal zulässige Drehzahl, d.h. ein zweiter Grenzwert YGrenz-max von 191 1/min. Solange die von dem Regler 6 vorgegebene Stellgröße YS unterhalb des vorgenannten Wertes liegt, kann die Stellgröße YS unmittelbar an den Frequenzumrichter 4 weitergegeben werden - ansonsten wird die Stellgröße YS durch eine von zweiten Korrekturmitteln 18 korrigierte bzw. begrenzte Stellgröße Y"S überschrieben.For example, a delivery fluid having a dynamic viscosity η of 5 Pas is delivered. This corresponds to a kinematic viscosity v of 5000 mm 2 / s, wherein, assuming a density ρ of 1000 kg / m 3 while maintaining a maximum allowable shear stress τ of 100000 N / m 2, a maximum allowable shear rate D zul of 20,000 1 / sec for the delivery fluid in a given pump. This is characterized by a rotor diameter of D a = 70 mm and by a differential pressure-dependent radial gap S = h 0 , which gives a value of 0.021 mm at Δp = 5 bar. This results in a maximum permissible speed, ie a second limit Y limit max of 191 1 / min. As long as the preset of the
Das oben beschriebene Beispiel basiert dabei auf den folgenden Berechnungsgrundlagen:
- Aus
- z.B. τzul = D * η und η = v * ρ für newtonsche Flüssigkeiten
- folgt

- Des Weiteren gilt

- Mit Einsetzen in

- kann unter Zusammenfassung aller vorkommenden Konstanten zu k die maximal zulässige Drehzahl berechnet werden:

- Out
- eg τ zul = D * η and η = v * ρ for Newtonian fluids
- follows
- Furthermore, applies
- With insertion in
- can be calculated by summing all occurring constants to k the maximum allowable speed:
Die maximal zulässige Drehzahl entspricht daher dem Grenzwert YGrenzmax. The maximum permissible speed therefore corresponds to the limit value Y Grenzmax.
Für den Fall, dass das zu fördernde Förderfluid (Medium) kein newtonsches Verhalten aufweist, müssten beispielsweise für strukturviskose Förderfluide zunächst die Reynoldszahlen im Pumpenfunktionsspalt, das Schergefälle und die dadurch sich ergebenden repräsentativen Viskositäten gemäß bekannter physikalischer Zusammenhänge berechnet werden. Hierdurch können in gleicher Weise wie im Fall newtonischer Förderfluide die zulässigen Verhältnisse für diese Fluide überwacht und eingehalten werden.In the event that the conveying fluid (medium) to be pumped does not exhibit Newtonian behavior, the Reynolds numbers in the pump function gap, the shear rate and the resulting shear, would have to be calculated, for example, for pseudoplastic conveying fluids representative viscosities are calculated according to known physical relationships. In this way, in the same way as in the case of Newtonian conveying fluids, the permissible conditions for these fluids can be monitored and maintained.
Das Ausführungsbeispiel gemäß
Es ist für das Ausführungsbeispiel gemäß
YS oder Y'S sind dann die Eingangsgrößen für die zweiten Vergleichsmittel 16. Erfolgt hier keine Korrektur wird der Eingangswert für den zweiten Vergleich YS oder Y'S an den Frequenzumrichter 4 geleitet oder im Falle einer Korrektur die korrigierte Stellgröße Y"S.Y S or Y ' S are then the input variables for the second comparison means 16. If no correction is made here, the input value for the second comparison Y S or Y' S is sent to the
In dem gezeigten Ausführungsbeispiel sind erste und zweite Entscheidungsmittel 20, 21 vorgesehen, in denen bestimmt wird, ob ein Pumpenschutzvergleich bzw. ein Mediumschutzvergleich durchgeführt werden soll. Die jeweilige Entscheidung kann beispielsweise softwaremäßig vorgegeben werden, so dass der Benutzer alternativ nur ein Pumpenschutzvergleich oder einen Mediumschutzvergleich realisieren kann, oder beide Vergleichsoperationen.In the exemplary embodiment shown, first and second decision-making means 20, 21 are provided in which it is determined whether a pump protection comparison or a medium protection comparison is to be carried out. The respective decision can for example be specified by software, so that the user alternatively only one Pump protection comparison or a medium protection comparison can realize, or both comparison operations.
Dieses Ausführungsbeispiel stellt ein bevorzugtes Ausführungsbeispiel zur Realisierung des Pumpenschutzes dar. Die Stellgröße ist ein Drehzahlsignal für die Pumpe, wobei die Pumpendrehzahl im Diagramm auf der linken Hochachse aufgetragen ist. Als erster Ist-Betriebsparameter fließt der Förderdruck, gemessen am Druckstutzen der Pumpe in die Berechnung des ersten Grenzwertes ein, wobei der Förderfluiddruck auf der rechten Hochachse aufgetragen ist. Die Förderfluidviskosität (Mediumviskosität) fließt als weiterer Ist-Betriebsparameter in die Berechnung des ersten Grenzwertes ein, wobei die Mediumviskosität auf der waagerechten unteren Achse aufgetragen ist. Als Führungsgrößen kommen hier alternativ der Förderfluidvolumenstrom bzw. die Pumpendrehzahl oder der Förderfluiddruck in Betracht. Im konkreten Ausführungsbeispiel wird davon ausgegangen, dass der Förderfluiddruck die Führungsgröße darstellt.This exemplary embodiment represents a preferred embodiment for realizing the pump protection. The manipulated variable is a speed signal for the pump, the pump speed being plotted in the diagram on the left vertical axis. As the first actual operating parameter, the delivery pressure, measured at the discharge nozzle of the pump, flows into the calculation of the first limit value, the delivery fluid pressure being plotted on the right vertical axis. The delivery fluid viscosity (medium viscosity) flows into the calculation of the first limit value as a further actual operating parameter, the medium viscosity being plotted on the horizontal lower axis. As a guide variables come here alternatively the delivery fluid volume flow or the pump speed or the delivery fluid pressure into consideration. In the specific embodiment, it is assumed that the delivery fluid pressure is the reference variable.
In dem gezeigten Ausführungsbeispiel wird davon ausgegangen, dass die Förderfluidviskosität (Mediumviskosität) wegen eines entsprechenden Mediumswechsel von 12mm2/s auf 9 mm2/s, auf 6 mm2/s, auf 4 mm2/s und dann (stufenweise) bis auf 2mm2/s absinkt. Der Förderfluidvolumenstrom darf schwanken. Die Führungsgröße, d.h. der Prozessdruck (Förderfluiddruck) soll anfänglich auf 10bar gehalten werden, danach auf 20bar, usw., also stufenweise um jeweils 10bar bis auf maximal 50bar steigen.. Anders ausgedrückt verändert sich die Führungsgröße stufenweise von anfänglich 10bar auf 50bar. Der Regler gibt in Abhängigkeit der Führungsgröße (W) eine Stellgröße (YS) aus. Die ersten Grenzwertvorgabemittel berechnen einen ersten Grenzwert, im vorliegenden Fall eine Mindestdrehzahl YGrenzmin in Abhängigkeit des ersten Ist-Betriebsparameters, hier des Förderfluiddrucks und des weiteren Ist-Betriebsparameters, hier der Mediumviskosität, wobei im konkreten Ausführungsbeispiel die Mediumviskosität mittelbar bestimmt wird über die Förderfluidtemperatur. Im vorliegenden Ausführunsbeispiel hätte ein Unterschreiten des ersten Grenzwertes, also der Mindestdrehzahl einen Defektzustand der Verdrängerpumpe zur Folge. Die Vergleichsmittel vergleichen in dem konkreten Ausführungsbeispiel die vom Regler vorgegebene Stellgröße, d.h. ein Drehzahlsignal mit dem von den ersten Grenzwertvorgabemitteln berechneten ersten Grenzwert. Liegt die Stellgröße in dem gezeigten Ausführungsbeispiel oberhalb dieses ersten Grenzwertes, wird die Stellgröße an den Frequenzumrichter als Eingangssignal weitergegeben. Unterschreitet die Stellgröße den ersten Grenzwert wird im dem gezeigten Ausführungsbeispiel eine korrigierte Stellgröße als Eingangssignal ermittelt bzw. bestimmt und an den Frequenzumrichter weitergegeben, wobei als korrigierte Stellgröße in dem gezeigten Ausführungsbeispiel von den ersten Korrekturmitteln der von den Grenzwertvorgabemitteln ermittelte erste Grenzwert weitergegeben wird.In the embodiment shown, it is assumed that the conveying fluid viscosity (medium viscosity) due to a corresponding medium change from 12mm 2 / s to 9 mm 2 / s, to 6 mm 2 / s, to 4 mm 2 / s and then (stepwise) up to 2mm 2 / s drops. The delivery fluid volume flow may fluctuate. The reference variable, ie the process pressure (delivery fluid pressure) should initially be kept at 10bar, then 20bar, etc., ie incrementally by 10bar each up to a maximum of 50bar. In other words, the reference variable will gradually change from 10bar to 50bar. The controller outputs a manipulated variable (Y S ) as a function of the reference variable (W). The first limit value specification means calculate a first limit value, in the present case a minimum rotational speed Y limit min as a function of the first actual operating parameter, here the delivery fluid pressure and the further actual operating parameter, here the medium viscosity, wherein in the concrete exemplary embodiment the medium viscosity is determined indirectly via the delivery fluid temperature. In the present Ausführunsbeispiel falling below the first limit, ie the minimum speed would cause a defect state of the positive displacement pump. The comparison means compare in the specific embodiment of the controller predetermined manipulated variable, ie, a speed signal with the first limit value calculated by the first threshold value setting means. If the manipulated variable in the illustrated embodiment is above this first limit value, the manipulated variable is forwarded to the frequency converter as an input signal. If the manipulated variable undershoots the first limit value, a corrected manipulated variable is determined or determined as an input signal in the embodiment shown and passed on to the frequency converter as a corrected manipulated variable in the embodiment shown by the first correction means passing on the first limit value determined by the limit value specification means.
- 11
- Verdrängerpumpensystempositive displacement pump
- 22
- Verdrängerpumpe bzw. VerdrängerpumpenmodulPositive displacement pump or positive displacement pump module
- 33
- VerdrängerpumpenmotorVerdrängerpumpenmotor
- 44
- Frequenzumrichterfrequency converter
- 55
- Steuermittelcontrol means
- 66
- Reglerregulator
- 77
- Logikmittellogic means
- 88th
- Führungsgrößenvorgabemittel, insbesondere LeitwarteCommand value specification means, in particular control room
- 99
- Differenzbilder des ReglersDifference pictures of the controller
- 1010
- erste Vergleichsmittelfirst comparison means
- 1111
- erste Funktionseinheitfirst functional unit
- 1212
- erste Grenzwertvorgabemittelfirst threshold value specification means
- 1313
- erste Korrekturmittelfirst correction means
- 1414
- ProzessregelstreckeProcess control system
- 1515
- zweite Grenzwertvorgabemittelsecond threshold value setting means
- 1616
- zweite Vergleichsmittelsecond comparison means
- 1717
- zweite Funktionseinheitsecond functional unit
- 1818
- zweite Korrekturmittelsecond correction means
- 1919
- SpeicherStorage
- 2020
- erste Entscheidungsmittelfirst decision-making tool
- 2121
- zweite Entscheidungsmittelsecond decision-making means
- 202202
- erstes Steuermodulfirst control module
- 203203
- zweites Steuermodulsecond control module
- 204204
- erstes Signalisierungsmittelfirst signaling means
- 205205
- Bildschirmscreen
- 206206
- LED-AmpelLED Traffic Light
- 207207
- Antriebsmoduldrive module
- 210210
- Kupplungclutch
- 211211
- erstes Pumpenmodulfirst pump module
- 212212
- erstes Sensormodulfirst sensor module
- 213213
- Bussystembus system
- 214214
- Analogeingängeanalog inputs
- 216216
- Analogverbindunganalog connection
- 217217
- Analogausganganalog output
- 218218
- DigitaleingängeDigital inputs
- 219219
- DigitalausgängeDigital outputs
- 220220
- zweite Digitalausgängesecond digital outputs
- 221221
- zweite Digitaleingängesecond digital inputs
- 222222
- zweite Analogeingängesecond analog inputs
- 223223
- zweite Analogausgängesecond analogue outputs
- 224224
- zweites Antriebsmodul, Sensormodulsecond drive module, sensor module
- 225225
- zweite Kupplungsecond clutch
- 226226
- zweites Pumpenmodulsecond pump module
- 227227
- zweites Sensormodulsecond sensor module
- 228228
- DigitalverbindungDigital connection
- 229229
- Computercomputer
- 230230
- Eingabemittelinput means
- 231231
- grüne LEDgreen LED
- 232232
- gelbe LEDyellow LED
- 233233
- DrucksensormodulPressure sensor module
- 234234
- Digitalverbindung bzw. AnalogverbindungDigital connection or analog connection
- 235235
- rote LEDred LED
- 236236
- rote LEDred LED
- YS Y s
- Stellgrößemanipulated variable
- YS'Y S '
- korrigierte Stellgrößecorrected manipulated variable
- YS"Y S "
- korrigierte Stellgrößecorrected manipulated variable
- XX
- erster Ist-Betriebsparameter (bevorzugt Ist-Regelgröße)first actual operating parameter (preferably actual controlled variable)
- YHH YHH
- weiterer Ist-Betriebsparameter (Hauptstellgröße)further actual operating parameter (main control variable)
- YH Y is H
- weiterer Ist-Betriebsparameter (Hilfsstellgröße)further actual operating parameter (auxiliary manipulated variable)
- XH X H
- weiterer Ist-Betriebsparameter (Hilfsregelgröße)further actual operating parameter (auxiliary control variable)
- WW
- Führungsgrößecommand variable
- GPGP
- Geometrieparameter der VerdrängerpumpeGeometry parameter of the positive displacement pump
- FPFP
- FörderfluidparameterConveying fluid parameters
Claims (16)
- Displacement pump system, having:- a displacement pump module (2; 211; 226), preferably a screw pump, and- a replaceable drive module (207) that is separate from the displacement pump module (2; 211; 226) and has an electric drive motor (3) and a frequency converter (4) assigned thereto for regulating or setting a drive motor speed, and- control means (5) having a controller (6) for creating a manipulated variable (Ys) for the frequency converter (4) depending on a reference variable (W) and a first actual operating parameter (X), and logic means (7) assigned to the controller (6)- reference variable setting means (8) for providing the reference variable (W) for the control means (5), wherein
the control means (5) are provided in a control module (202, 203) that is separate from the drive module (207), and
the drive module (207) is replaceable separately from the control module (202, 2033), and
the drive module (207) has no controllers configured and/or activated for generating a manipulated variable (Ys),
characterized in
that different system parameter data records for various displacement pumps (2) and/or different conveyed fluid parameters (FP), in particular ones that are selectable via a selection menu, are stored, preferably manually, in a nonvolatile memory (19), in particular an EEPROM of the control means (5). - System according to Claim 1,
characterized in
that the logic means (7) have first limit value setting means (12) which are designed to determine at least one first limit value (YGrenzmax, YGrenzmin) depending on the first actual operating parameter (X), in particular the conveyed fluid pressure, and at least one additional actual operating parameter (XH, YH, YHH), which, if exceeded or undershot, could result in a defect state of the displacement pump (2), and
which have first comparison means (10) that are configured to compare the manipulated variable (Ys), or a corrected manipulated variable (Y's, Y"s), or a comparison value determined according to a functional relationship from the manipulated variable (Ys) or the corrected manipulated variable (Y's, Y"s) to the at least one limit value (YGrenzmax, YGrenzmin), and
which have first correction means (13) that are configured in order to output - in the event that the first comparison means (10) detect an exceeding of or an undershooting of the at least one first limit value (YGrenzmax, YGrenzmin) by a certain degree - a corrected manipulated variable (Y's, Y"s) which corresponds to limit value (YGrenzmax, YGrenzmin) determined by the limit value setting means (12). - System according to Claim 1,
characterized in
that the logic means (7) have the second limit value setting means (15), which are configured to determine at least one second limit value (YGrenzmax, YGrenzmin) depending on the first actual operating parameter (X), and at least one additional actual operating parameter (XH, YH, YHH), in particular of the conveyed fluid viscosity, which, if exceeded or undershot, could have a negative impact on the quality parameter of the delivery fluid that was delivered with the displacement pump (2), and
which have second comparison means (16) that are configured to compare the manipulated variable (Ys), or a corrected manipulated variable (Y's, Y"s), or a comparison value determined according to a functional relationship from the manipulated variable (Ys) or the corrected manipulated variable (Y's, Y"s) to the at least one second limit value (YGrenzmax, YGrenzmin), and
which has second correction means (18) that are configured to output - in the event that the second comparison means (16) detect an exceeding or undershooting of the at least one second limit value (YGrenzmax, YGrenzmin) by a certain degree - a corrected manipulated variable (Y's, Y"s) that preferably corresponds to a limit value (YGrenzmax, YGrenzmin) determined by the second limit value setting means (15). - System according to Claim 2 or 3,
characterized in
that the first actual operating parameter is a measured actual controlled variable (X), in particular an actual pressure, an actual pressure difference, or an actual volumetric flow of the conveyed fluid. - System according to any of Claims 2 to 4,
characterized in
that the at least one additional actual operating parameter is a measured actual controlled variable (X), in particular an actual pressure, an actual pressure difference or an actual volumetric flow of the conveyed fluid, and/or that the at least one additional actual operating parameter is an auxiliary manipulated variable (YH) which is measured or calculated on an actual value basis, in particular a rotational frequency target value of the frequency converter (4) or a torque target value of the frequency converter (4), and/or that the at least one additional operating parameter is an auxiliary manipulated variable (YH) that is measured or calculated on the basis of an actual value, in particular a speed of the displacement pump motor (3) or a torque of the displacement pump motor (3), and/or that the at least one additional actual operating parameter is a measured temperature, in particular a conveyed fluid temperature or a storage temperature of the displacement pump (2), and/or that the at least on additional operating parameter is a measured vibration value, and/or that the at least one additional actual operating parameter is a conveyed fluid viscosity that is measured or calculated, and/or that the at least one additional actual operating parameter is a measured leakage rate. - System according to any of Claims 2 to 5,
characterized in
that the logic means (7) comprise at least one comparison value determination means which is configured to determine the comparison value on the basis of a functional relationship from the manipulated variable (Ys), or from the corrected manipulated variable (Y's, Y"s), and/or from the first and the at least one additional actual operating parameter (XH, YH, YHH). - System according to Claim 6,
characterized in
that the comparison value determination means are configured in such a way that, for the determination of the comparison value within the context of the functional relationship, they take into account at least one geometric parameter (GP) stored in a memory (19) that is specific for the displacement pump (2) assigned to the control means (5), preferably a gap width or a spindle diameter, and/or from a conveyed fluid parameter (FP) stored in a memory (19), in particular the shear behavior of the conveyed fluid. - System according to any of Claims 2 to 7,
characterized in
that the first and/or the second limit value setting means are configured determining the first or second limit value as a function of at least one geometric parameter (GP) stored in a memory (19) which is specific for the displacement pump (2) assigned to the control means (5), preferably a gap width or a spindle diameter, and/or as a function of a conveyed fluid parameter (FP) stored in a memory (19), in particular the shear behavior of the conveyed fluid. - System according to any of Claims 2 to 8,
characterized in
that the first and/or the second correction means are configured determining the corrected manipulated variable (Y's, Y"s) as a function of at least one geometric parameter (GP) stored in a memory (19) which is specific for the displacement pump (2) assigned to the control means (5), a gap width or a spindle diameter, and/or as a function of a conveyed fluid parameter (FP) stored in a memory (19), in particular the shear behavior of the conveyed fluid. - System according to any of Claims 2 to 9,
characterized in
that the first and/or the second limit value setting means are configured determining the first or the second limit value as a function of a minimum or maximum shearing rate in the displacement pump (2) stored in a memory (19) which is specific for the displacement pump (2) assigned to the control means (5), and/or as a function of the actual shearing rate, and/or that the first and/or second correction means are configured determining the corrected manipulated variable (Y's, Y"s) as a function of at least one shearing rate in the displacement pump (2) stored in a memory (19) which is specific for the displacement pump (2) assigned to the control means (5), and/or as a function of the actual shearing rate. - System according to any of Claims 2 to 10,
characterized in
that the first and/or the second comparison means are configured to compare the first actual operating parameter (X), and/or the at least one additional actual operating parameter (XH, YH, YHH), and/or a value calculated according to a functional relationship from the first actual operating parameter (X), and/or from the at least one additional actual operating parameter (XH, YH, YHH), or a manipulated variable (Ys) of the controller (6), or a corrected manipulated variable or a comparison value calculated on the basis of the manipulated variable (Ys), or the corrected manipulated variable (Y's, Y"s) to at least one limit value stored in a memory (19) of the logic means (7), and that the first or second correction means are configured to output a corrected manipulated variable (Y's, Y"s) in the event that the first comparison means detect an exceeding or an undershooting of the at least one set limit value. - System according to any of the preceding claims,
characterized in
that the logic means (7) for determining and/or signaling when a servicing of the displacement pump (2) is required are configured depending on the first actual operating parameter (X), and/or at least one additional actual operating parameter (XH, YH, YHH), and/or a parameter which is specific for the displacement pump (2) assigned to the control means (5). - System according to any of the preceding claims,
characterized in
that the control means (5) have storage means that are configured and activated in order to save the first actual operating parameter (X), and/or the at least one additional operating parameter (XH, YH, YHH), and/or the reference variables (W), and/or the comparison values, and/or the limit values, preferably each with a time stamp. - System according to any of the preceding claims,
characterized in
that the control means (5) along with the process monitoring system and/or plurality of control means (5) are configured to communicate with each other via a bus system, in particular a CAN bus system. - System according to any of the preceding claims,
characterized in
that the control means (5) are connected in a signal-conducting manner to at least one sensor for the reception of the first actual operating parameter (X) and/or the at least one additional measured actual operating parameter (XH, YH, YHH), and/or that the control means (5) is connected in a signal-conducting manner to the frequency converter (4) for the reception of the first actual operating parameter (X) and/or the at least one additional measured actual operating parameter (XH, YH, YHH), in particular a displacement pump motor speed, and/or a rotational frequency target value of the frequency converter (4), and/or a rotational frequency target value of the frequency converter (4). - System according to any of the preceding claims,
characterized in
that a plurality of control modules (202, 203) connected to the bus system (213) are provided, each of which is assigned to a drive module (207) and a pump module (2, 21 1,226).
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102011050018A DE102011050018A1 (en) | 2011-04-29 | 2011-04-29 | Pump System |
| PCT/EP2012/057664 WO2012146662A2 (en) | 2011-04-29 | 2012-04-26 | Pump system |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2702272A2 EP2702272A2 (en) | 2014-03-05 |
| EP2702272B1 true EP2702272B1 (en) | 2018-11-14 |
Family
ID=46197228
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP12724580.1A Not-in-force EP2702272B1 (en) | 2011-04-29 | 2012-04-26 | Pump system |
Country Status (6)
| Country | Link |
|---|---|
| US (2) | US9995297B2 (en) |
| EP (1) | EP2702272B1 (en) |
| JP (2) | JP2014512488A (en) |
| CN (1) | CN103620218B (en) |
| DE (1) | DE102011050018A1 (en) |
| WO (1) | WO2012146662A2 (en) |
Families Citing this family (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2013136627A1 (en) * | 2012-03-12 | 2015-08-03 | 富士電機株式会社 | Motor drive system |
| US10495084B2 (en) * | 2012-04-11 | 2019-12-03 | Itt Manufacturing Enterprises Llc | Method for twin screw positive displacement pump protection |
| US10046351B2 (en) * | 2014-07-14 | 2018-08-14 | Graco Minnesota Inc. | Material dispense tracking and control |
| JP6476696B2 (en) * | 2014-09-30 | 2019-03-06 | アイシン精機株式会社 | Fuel cell system |
| CN104900278B (en) * | 2015-06-19 | 2017-02-22 | 中国核动力研究设计院 | Simulating method for controlling pump flow during conversion between active system and passive system |
| US11624362B2 (en) * | 2015-08-07 | 2023-04-11 | Magpumps Limited | Device for pumping fluid |
| US10473097B2 (en) | 2015-09-02 | 2019-11-12 | Tigerflow Systems, Llc | System and method for speed control of variable speed pumping systems |
| WO2020033682A1 (en) | 2018-08-08 | 2020-02-13 | Fluid Handling Llc | Variable speed pumping control system with active temperature and vibration monitoring and control means |
| EP3629113A1 (en) * | 2018-09-28 | 2020-04-01 | Siemens Aktiengesellschaft | Projecting, configuring and maintenance of a drive device |
| DE102019108781A1 (en) | 2019-04-03 | 2020-10-08 | Peri Gmbh | Computer-aided method and device for optimized control of the delivery rate of a concrete pump or the like |
| DE102019112792A1 (en) | 2019-05-15 | 2020-11-19 | Leistritz Pumpen Gmbh | Method for determining a flow volume of a fluid conveyed by a pump |
| CN110332102B (en) * | 2019-07-23 | 2021-08-20 | 珠海格力电器股份有限公司 | Control method and device of automatic emptying water pump, corresponding equipment and storage medium |
| CN112697975A (en) * | 2020-12-15 | 2021-04-23 | 潍柴动力股份有限公司 | Method and device for measuring urea concentration, electronic device, and storage medium |
| DE102020133760A1 (en) * | 2020-12-16 | 2022-06-23 | Leistritz Pumpen Gmbh | Process for conveying a fluid through a screw pump and screw pump |
| RU207356U1 (en) * | 2021-03-23 | 2021-10-25 | Общество с ограниченной ответственностью "Кварт" | MOBILE PUMP MODULE DRAIN-FILLING LIQUIDS, ACIDS AND ALKALI |
| CN112983798B (en) * | 2021-03-25 | 2023-02-24 | 烟台杰瑞石油装备技术有限公司 | Control method and control device applied to electrically-driven fracturing equipment |
| EP4120558A1 (en) * | 2021-07-15 | 2023-01-18 | Abb Schweiz Ag | A method, an arrangement and a frequency converter for controlling vibration of an electric machine |
| JP2023127381A (en) * | 2022-03-01 | 2023-09-13 | 株式会社島津製作所 | Controller of vacuum pump and control method |
| CN115085630B (en) * | 2022-07-21 | 2024-05-28 | 国网新源控股有限公司 | Optimized motor vibration suppression method in starting process of static frequency converter |
| CN115454153A (en) * | 2022-10-26 | 2022-12-09 | 北京七星华创流量计有限公司 | Mass flow controller and flow control method thereof |
| CN116146357B (en) * | 2023-02-27 | 2023-09-26 | 贵州航天林泉电机有限公司 | Feedforward control method of electric fuel pump |
| CN116624360B (en) * | 2023-05-25 | 2024-02-09 | 广东托亚电器科技有限公司 | Low-pressure rapid inflation pumping structure and application thereof in vehicle-mounted inflator pump |
Family Cites Families (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE2823558C2 (en) * | 1978-05-30 | 1983-08-11 | Vanbelle, Jean William, 8174 Benediktbeuern | Device for monitoring complex machines such as compressor systems |
| DE29724347U1 (en) * | 1996-07-29 | 2000-11-16 | Gebr. Becker Gmbh & Co, 42279 Wuppertal | frequency converter |
| DE19724643A1 (en) * | 1997-06-11 | 1998-12-17 | Sihi Gmbh & Co Kg | Screw compressor and method of operating the same |
| US6097171A (en) * | 1998-01-30 | 2000-08-01 | A. O. Smith Corporation | Method and apparatus for controlling an induction motor |
| DE19842565B4 (en) * | 1998-09-03 | 2005-08-25 | Ksb Ag | Automatic determination of the PID controller parameters for a pressure control loop in multi-pump systems |
| JP3584279B2 (en) * | 1998-10-30 | 2004-11-04 | 理学電機工業株式会社 | X-ray fluorescence analyzer |
| JP2000283056A (en) * | 1999-03-26 | 2000-10-10 | Hitachi Ltd | Vacuum pump abnormality monitoring system |
| JP2001012379A (en) * | 1999-06-29 | 2001-01-16 | Aisin Seiki Co Ltd | Vacuum pump with maintenance judging function |
| US6360717B1 (en) * | 2000-08-14 | 2002-03-26 | Caterpillar Inc. | Fuel injection system and a method for operating |
| US8914300B2 (en) * | 2001-08-10 | 2014-12-16 | Rockwell Automation Technologies, Inc. | System and method for dynamic multi-objective optimization of machine selection, integration and utilization |
| JP2003077907A (en) | 2001-08-31 | 2003-03-14 | Toshiba Corp | Method and system for avoiding abnormal stop of manufacturing apparatus |
| GB0216647D0 (en) * | 2002-07-17 | 2002-08-28 | Schlumberger Holdings | System and method for obtaining and analyzing well data |
| US6890156B2 (en) | 2002-11-01 | 2005-05-10 | Polyphase Engineered Controls | Reciprocating pump control system |
| DE202005001746U1 (en) * | 2004-08-20 | 2005-12-22 | Nash-Elmo Industries Gmbh | Fluidic machine controller, has governor module which from actual value and reference value produces set value supplied to both control module and to control unit |
| DE102005014050A1 (en) * | 2005-03-23 | 2006-09-28 | Endress + Hauser Process Solutions Ag | Method for safe operation of a field device of automation technology |
| ITRM20050373A1 (en) * | 2005-07-13 | 2007-01-14 | Seko Bono Exacta S P A | PILOT DEVICE FOR A PUMP OPERATING ELECTROMAGNET, AND RELATED DOSING ELECTROMAGNETIC PUMP. |
| EP1847714B1 (en) * | 2006-04-20 | 2016-11-09 | ABB Oy | Frequency converter for motor pump |
| KR100885919B1 (en) * | 2007-05-21 | 2009-02-26 | 삼성전자주식회사 | Pump fault prediction device and punp fault prediction method |
| EA017143B1 (en) * | 2007-06-27 | 2012-10-30 | ЭйчАДи КОПЭРЕЙШН | System and process for production of nitrobenzene |
| GB2451876A (en) * | 2007-08-15 | 2009-02-18 | Mono Pumps Ltd | Pump system for a pressure sewer system |
| DE102008063927A1 (en) * | 2007-12-21 | 2009-06-25 | Robert Bosch Gmbh | Collective load determination method for hydrostatic machine i.e. hydro pump, of stationary plant e.g. press, involves measuring system parameters, memorizing measured values by control device, and determining and storing collective load |
| BRPI0800251B1 (en) * | 2008-02-22 | 2021-02-23 | Embraco Indústria De Compressores E Soluções Em Refrigeração Ltda | linear compressor control system and method |
| US20090220352A1 (en) | 2008-02-29 | 2009-09-03 | Carstensen Peter T | Method and Device for Monitoring and Controlling a Hydraulic Actuated Process |
| US9678496B2 (en) * | 2008-05-23 | 2017-06-13 | Amtec Meter & Controls, Inc. | Concrete material dispensing system |
| CN201363264Y (en) | 2009-03-18 | 2009-12-16 | 纪国忠 | Constant-temperature automatic control system for circulating water pump |
| US9164501B2 (en) * | 2009-10-05 | 2015-10-20 | Fisher-Rosemount Systems, Inc. | Methods and apparatus to manage data uploading in a process control environment |
| US8483916B2 (en) * | 2011-02-28 | 2013-07-09 | Caterpillar Inc. | Hydraulic control system implementing pump torque limiting |
-
2011
- 2011-04-29 DE DE102011050018A patent/DE102011050018A1/en not_active Ceased
-
2012
- 2012-04-26 JP JP2014506867A patent/JP2014512488A/en active Pending
- 2012-04-26 CN CN201280020693.XA patent/CN103620218B/en not_active Expired - Fee Related
- 2012-04-26 EP EP12724580.1A patent/EP2702272B1/en not_active Not-in-force
- 2012-04-26 WO PCT/EP2012/057664 patent/WO2012146662A2/en active Application Filing
- 2012-04-26 US US14/113,666 patent/US9995297B2/en not_active Expired - Fee Related
-
2017
- 2017-11-24 JP JP2017226074A patent/JP2018066375A/en active Pending
-
2018
- 2018-05-11 US US15/977,087 patent/US20180258926A1/en not_active Abandoned
Non-Patent Citations (1)
| Title |
|---|
| None * |
Also Published As
| Publication number | Publication date |
|---|---|
| US20180258926A1 (en) | 2018-09-13 |
| CN103620218A (en) | 2014-03-05 |
| DE102011050018A1 (en) | 2012-10-31 |
| US20140056720A1 (en) | 2014-02-27 |
| JP2018066375A (en) | 2018-04-26 |
| US9995297B2 (en) | 2018-06-12 |
| WO2012146662A2 (en) | 2012-11-01 |
| CN103620218B (en) | 2016-12-07 |
| JP2014512488A (en) | 2014-05-22 |
| WO2012146662A3 (en) | 2013-05-23 |
| EP2702272A2 (en) | 2014-03-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2702272B1 (en) | Pump system | |
| EP2702459A1 (en) | Controller for controlling a frequency inverter and control method | |
| EP2145112B2 (en) | Device and method for fault monitoring | |
| EP0228665B1 (en) | Limiting surge regulation method for turbocompressors | |
| EP3739212A1 (en) | Method for determining a flow volume of a fluid pumped by a pump | |
| EP1564411B2 (en) | Method for detecting operation errors of a pump aggregate | |
| EP1892597A1 (en) | State monitoring for machines and technical equipment | |
| DE112013004970T5 (en) | Pressure control by means of a phase current and initial setting in a vehicle series | |
| EP3824303B1 (en) | Method for evaluating the operational readiness of an electric motor, electric motor, and ventilator | |
| DE102007010768B4 (en) | Method for optimizing valve position and pump speed in a valve system with PID control without the use of external signals | |
| WO2012119723A2 (en) | Method for supplying coolant, a switching arrangement, and machine tool | |
| DE102008010466A1 (en) | Wind turbine with blade pitch regulator | |
| DE102010009164A1 (en) | Method for recognizing operating mode of e.g. spinning machine, involves measuring and evaluating operational parameter of electromotor and/or position unit, such that motor-referred or motor-wear-referred state quantity is determined | |
| EP2628391B1 (en) | Method for filling sausages with paste mass and filling machine for performing this method | |
| EP3259463B1 (en) | Method for regulating a fuel pump | |
| DE102015207672B3 (en) | Method for controlling a fuel delivery system | |
| WO2021018840A1 (en) | Method for monitoring a fuel supply system of an internal combustion engine and internal combustion engine for carrying out such a method | |
| DE102005003591A1 (en) | Secondary air diagnosis of an internal combustion engine | |
| DE102006032648A1 (en) | Diagnostic system for monitoring condition and detecting operation deterioration and failures in e.g. centrifugal pump, has evaluation unit determining and evaluating degradation index from deviations between actual and target parameters | |
| DE102007003695B4 (en) | Method and device for controlling drives | |
| DE102007014325B4 (en) | Method and device for monitoring a pressure signal, in particular a rail pressure signal of a common rail system | |
| DE102011120686A1 (en) | Method for monitoring a pump | |
| EP2165062B1 (en) | Method and apparatus for monitoring the function of a rotational speed regulator | |
| EP4261413A1 (en) | Device and method for determining a state, in particular a wear state, of a displacement unit | |
| DE102010047298A1 (en) | Method for operating centrifugal pump, involves outputting alarm signal when current value of predetermined operating parameter of centrifugal pump is greater than operation allowable range of respective parameter |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20131028 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| DAX | Request for extension of the european patent (deleted) | ||
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| 17Q | First examination report despatched |
Effective date: 20170808 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20180725 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP Ref country code: AT Ref legal event code: REF Ref document number: 1065141 Country of ref document: AT Kind code of ref document: T Effective date: 20181115 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502012013817 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20181114 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190214 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190314 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190214 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190215 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190314 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502012013817 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20190815 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 502012013817 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20190430 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20190426 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190426 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20191101 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190430 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190426 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190430 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190430 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190426 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190430 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 1065141 Country of ref document: AT Kind code of ref document: T Effective date: 20190426 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190426 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20120426 Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 |