EP2370184B1 - Muscle and/or joint exercise apparatus - Google Patents
Muscle and/or joint exercise apparatus Download PDFInfo
- Publication number
- EP2370184B1 EP2370184B1 EP09802163.7A EP09802163A EP2370184B1 EP 2370184 B1 EP2370184 B1 EP 2370184B1 EP 09802163 A EP09802163 A EP 09802163A EP 2370184 B1 EP2370184 B1 EP 2370184B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- exercise
- user
- motor
- mobile member
- arm
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 210000003205 muscle Anatomy 0.000 title claims description 88
- 230000033001 locomotion Effects 0.000 claims description 121
- 238000006073 displacement reaction Methods 0.000 claims description 89
- 238000000034 method Methods 0.000 claims description 43
- 230000002441 reversible effect Effects 0.000 claims description 23
- 210000001364 upper extremity Anatomy 0.000 claims description 23
- 210000003141 lower extremity Anatomy 0.000 claims description 20
- 230000000670 limiting effect Effects 0.000 claims description 9
- 230000000694 effects Effects 0.000 claims description 8
- 230000001133 acceleration Effects 0.000 claims description 7
- 230000029058 respiratory gaseous exchange Effects 0.000 claims description 7
- QVGXLLKOCUKJST-UHFFFAOYSA-N atomic oxygen Chemical compound [O] QVGXLLKOCUKJST-UHFFFAOYSA-N 0.000 claims description 6
- 229910052760 oxygen Inorganic materials 0.000 claims description 6
- 239000001301 oxygen Substances 0.000 claims description 6
- 230000036772 blood pressure Effects 0.000 claims description 4
- 230000035790 physiological processes and functions Effects 0.000 claims description 4
- 239000008280 blood Substances 0.000 claims description 3
- 210000004369 blood Anatomy 0.000 claims description 3
- 230000007613 environmental effect Effects 0.000 claims description 3
- 230000003750 conditioning effect Effects 0.000 claims 2
- 238000013519 translation Methods 0.000 description 78
- 208000031968 Cadaver Diseases 0.000 description 38
- 238000006243 chemical reaction Methods 0.000 description 29
- 230000006870 function Effects 0.000 description 24
- 238000012549 training Methods 0.000 description 22
- 230000005540 biological transmission Effects 0.000 description 17
- 210000003414 extremity Anatomy 0.000 description 16
- 230000004048 modification Effects 0.000 description 14
- 238000012986 modification Methods 0.000 description 14
- 230000003387 muscular Effects 0.000 description 14
- 238000005259 measurement Methods 0.000 description 11
- 230000008901 benefit Effects 0.000 description 10
- 230000036544 posture Effects 0.000 description 9
- 210000002435 tendon Anatomy 0.000 description 8
- FGUUSXIOTUKUDN-IBGZPJMESA-N C1(=CC=CC=C1)N1C2=C(NC([C@H](C1)NC=1OC(=NN=1)C1=CC=CC=C1)=O)C=CC=C2 Chemical compound C1(=CC=CC=C1)N1C2=C(NC([C@H](C1)NC=1OC(=NN=1)C1=CC=CC=C1)=O)C=CC=C2 FGUUSXIOTUKUDN-IBGZPJMESA-N 0.000 description 6
- 230000008859 change Effects 0.000 description 6
- 230000002427 irreversible effect Effects 0.000 description 6
- 230000003189 isokinetic effect Effects 0.000 description 6
- 210000003127 knee Anatomy 0.000 description 6
- 230000000750 progressive effect Effects 0.000 description 6
- 230000033764 rhythmic process Effects 0.000 description 6
- 238000012360 testing method Methods 0.000 description 6
- 230000003042 antagnostic effect Effects 0.000 description 5
- 210000001513 elbow Anatomy 0.000 description 5
- 230000000007 visual effect Effects 0.000 description 5
- 241001080024 Telles Species 0.000 description 4
- 210000003423 ankle Anatomy 0.000 description 4
- 230000002457 bidirectional effect Effects 0.000 description 4
- 230000008602 contraction Effects 0.000 description 4
- 239000000835 fiber Substances 0.000 description 4
- 210000001624 hip Anatomy 0.000 description 4
- 210000002414 leg Anatomy 0.000 description 4
- 210000000056 organ Anatomy 0.000 description 4
- 230000007170 pathology Effects 0.000 description 4
- 210000004197 pelvis Anatomy 0.000 description 4
- 239000003053 toxin Substances 0.000 description 4
- 231100000765 toxin Toxicity 0.000 description 4
- 108700012359 toxins Proteins 0.000 description 4
- 238000012546 transfer Methods 0.000 description 4
- 238000012550 audit Methods 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 230000002526 effect on cardiovascular system Effects 0.000 description 3
- 208000014674 injury Diseases 0.000 description 3
- 239000003607 modifier Substances 0.000 description 3
- 210000001087 myotubule Anatomy 0.000 description 3
- 238000006213 oxygenation reaction Methods 0.000 description 3
- 230000002829 reductive effect Effects 0.000 description 3
- 230000036387 respiratory rate Effects 0.000 description 3
- 239000000523 sample Substances 0.000 description 3
- 210000002832 shoulder Anatomy 0.000 description 3
- 238000002560 therapeutic procedure Methods 0.000 description 3
- 230000008733 trauma Effects 0.000 description 3
- 210000000689 upper leg Anatomy 0.000 description 3
- 210000000707 wrist Anatomy 0.000 description 3
- 230000009471 action Effects 0.000 description 2
- 230000006978 adaptation Effects 0.000 description 2
- 239000005557 antagonist Substances 0.000 description 2
- 210000000988 bone and bone Anatomy 0.000 description 2
- 238000011161 development Methods 0.000 description 2
- 230000018109 developmental process Effects 0.000 description 2
- 210000000245 forearm Anatomy 0.000 description 2
- 238000012423 maintenance Methods 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 230000001575 pathological effect Effects 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 238000011084 recovery Methods 0.000 description 2
- 230000000241 respiratory effect Effects 0.000 description 2
- 230000005236 sound signal Effects 0.000 description 2
- 230000003068 static effect Effects 0.000 description 2
- 230000035900 sweating Effects 0.000 description 2
- 230000001225 therapeutic effect Effects 0.000 description 2
- 101100536354 Drosophila melanogaster tant gene Proteins 0.000 description 1
- 206010019280 Heart failures Diseases 0.000 description 1
- 208000016285 Movement disease Diseases 0.000 description 1
- 206010070757 Muscle contusion Diseases 0.000 description 1
- 208000002193 Pain Diseases 0.000 description 1
- 241000287107 Passer Species 0.000 description 1
- 208000000491 Tendinopathy Diseases 0.000 description 1
- 206010043255 Tendonitis Diseases 0.000 description 1
- 241000897276 Termes Species 0.000 description 1
- 230000003044 adaptive effect Effects 0.000 description 1
- 239000000556 agonist Substances 0.000 description 1
- 230000006399 behavior Effects 0.000 description 1
- 208000027499 body ache Diseases 0.000 description 1
- 230000000747 cardiac effect Effects 0.000 description 1
- 210000004903 cardiac system Anatomy 0.000 description 1
- 239000003638 chemical reducing agent Substances 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 230000036461 convulsion Effects 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 230000007812 deficiency Effects 0.000 description 1
- 230000006735 deficit Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 230000001627 detrimental effect Effects 0.000 description 1
- 210000002683 foot Anatomy 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 210000004247 hand Anatomy 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 230000036571 hydration Effects 0.000 description 1
- 238000006703 hydration reaction Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 230000000266 injurious effect Effects 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 230000007774 longterm Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 238000000465 moulding Methods 0.000 description 1
- 210000004126 nerve fiber Anatomy 0.000 description 1
- 244000045947 parasite Species 0.000 description 1
- 230000003071 parasitic effect Effects 0.000 description 1
- 230000036961 partial effect Effects 0.000 description 1
- 238000000554 physical therapy Methods 0.000 description 1
- 230000004962 physiological condition Effects 0.000 description 1
- 230000010349 pulsation Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000008929 regeneration Effects 0.000 description 1
- 238000011069 regeneration method Methods 0.000 description 1
- 230000002787 reinforcement Effects 0.000 description 1
- 230000003252 repetitive effect Effects 0.000 description 1
- 230000000284 resting effect Effects 0.000 description 1
- 230000000452 restraining effect Effects 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 230000008685 targeting Effects 0.000 description 1
- 201000004415 tendinitis Diseases 0.000 description 1
- 230000001960 triggered effect Effects 0.000 description 1
- 238000010792 warming Methods 0.000 description 1
- 230000004580 weight loss Effects 0.000 description 1
Images














Classifications
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B21/00—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices
- A63B21/005—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices using electromagnetic or electric force-resisters
- A63B21/0058—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices using electromagnetic or electric force-resisters using motors
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B24/00—Electric or electronic controls for exercising apparatus of preceding groups; Controlling or monitoring of exercises, sportive games, training or athletic performances
- A63B24/0003—Analysing the course of a movement or motion sequences during an exercise or trainings sequence, e.g. swing for golf or tennis
- A63B24/0006—Computerised comparison for qualitative assessment of motion sequences or the course of a movement
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B24/00—Electric or electronic controls for exercising apparatus of preceding groups; Controlling or monitoring of exercises, sportive games, training or athletic performances
- A63B24/0075—Means for generating exercise programs or schemes, e.g. computerized virtual trainer, e.g. using expert databases
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B71/00—Games or sports accessories not covered in groups A63B1/00 - A63B69/00
- A63B71/06—Indicating or scoring devices for games or players, or for other sports activities
- A63B71/0619—Displays, user interfaces and indicating devices, specially adapted for sport equipment, e.g. display mounted on treadmills
- A63B71/0622—Visual, audio or audio-visual systems for entertaining, instructing or motivating the user
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B24/00—Electric or electronic controls for exercising apparatus of preceding groups; Controlling or monitoring of exercises, sportive games, training or athletic performances
- A63B24/0003—Analysing the course of a movement or motion sequences during an exercise or trainings sequence, e.g. swing for golf or tennis
- A63B24/0006—Computerised comparison for qualitative assessment of motion sequences or the course of a movement
- A63B2024/0012—Comparing movements or motion sequences with a registered reference
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B71/00—Games or sports accessories not covered in groups A63B1/00 - A63B69/00
- A63B71/06—Indicating or scoring devices for games or players, or for other sports activities
- A63B71/0619—Displays, user interfaces and indicating devices, specially adapted for sport equipment, e.g. display mounted on treadmills
- A63B71/0622—Visual, audio or audio-visual systems for entertaining, instructing or motivating the user
- A63B2071/0625—Emitting sound, noise or music
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B71/00—Games or sports accessories not covered in groups A63B1/00 - A63B69/00
- A63B71/06—Indicating or scoring devices for games or players, or for other sports activities
- A63B71/0619—Displays, user interfaces and indicating devices, specially adapted for sport equipment, e.g. display mounted on treadmills
- A63B2071/0655—Tactile feedback
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B21/00—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices
- A63B21/00181—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices comprising additional means assisting the user to overcome part of the resisting force, i.e. assisted-active exercising
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B21/00—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices
- A63B21/002—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices isometric or isokinetic, i.e. substantial force variation without substantial muscle motion or wherein the speed of the motion is independent of the force applied by the user
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/10—Positions
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/20—Distances or displacements
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/20—Distances or displacements
- A63B2220/24—Angular displacement
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/30—Speed
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/40—Acceleration
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/50—Force related parameters
- A63B2220/51—Force
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/50—Force related parameters
- A63B2220/54—Torque
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/62—Time or time measurement used for time reference, time stamp, master time or clock signal
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/70—Measuring or simulating ambient conditions, e.g. weather, terrain or surface conditions
- A63B2220/72—Temperature
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/70—Measuring or simulating ambient conditions, e.g. weather, terrain or surface conditions
- A63B2220/74—Atmospheric pressure
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/70—Measuring or simulating ambient conditions, e.g. weather, terrain or surface conditions
- A63B2220/75—Humidity
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2225/00—Miscellaneous features of sport apparatus, devices or equipment
- A63B2225/20—Miscellaneous features of sport apparatus, devices or equipment with means for remote communication, e.g. internet or the like
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2225/00—Miscellaneous features of sport apparatus, devices or equipment
- A63B2225/50—Wireless data transmission, e.g. by radio transmitters or telemetry
Definitions
- the present invention relates to a muscular and / or joint exercise apparatus, to a muscular and / or joint exercise device comprising such an exercise apparatus and to a method of using this exercise apparatus; such apparatus being adapted for rehabilitation and / or physical training of a user's body part, such as an upper limb (arm) and / or lower limb (limb), or an upper limb part ( forearm, wrist, elbow) and / or lower (ankle, thigh, knee), or another part of the body such as the hip or pelvis.
- a user's body part such as an upper limb (arm) and / or lower limb (limb), or an upper limb part ( forearm, wrist, elbow) and / or lower (ankle, thigh, knee), or another part of the body such as the hip or pelvis.
- It relates more particularly to a muscular and articular exercise machine that can advantageously be used in a hospital, a physiotherapy practice, a sports club, a fitness club or at home at the user, of course. per user any person likely to use such an exercise machine.
- the muscles because of the asymmetry of the orientation of their fibers and their insertions, exert on the bones and their joints forces and / or simultaneous bidirectional or even multi-directional couples .
- almost all the muscles exert multi-directional stresses on the articular segments.
- the overactivation of the muscular activity can reach 15 to 25% of muscular motor units recruited in addition to a muscle exercise developing unidirectional efforts; the motor unit being defined as an assembly comprising a muscle fiber and a nerve fiber ensuring its control.
- bidirectional, multidirectional or pluridirectional terms express the possibility for a subject, a limb, or one or more joints, to be able to simultaneously or successively perform an effort according to several degrees of freedom, therefore according to several directions, as will be shown hereinafter in detail.
- the tensile force F of the machine remains during all the movement almost constant.
- the breathing is adjusted substantially to the rhythm of the movements, which do not correspond to the normal rhythm of breathing. So this breathing will not allow a correct oxygen supply and the muscle will work in anaerobic way, in other words with a deficit in oxygenation.
- Such a deficiency of oxygenation of the muscles creates toxins that will have to be evacuated, to avoid aches, by stretching at the end of exercise and a greater hydration.
- known musculoskeletal devices are generally not versatile or multifunctional in the sense that these devices have articulations specifically dedicated to the exercise of certain muscles or certain limbs or parts of limbs, such as the arm, the shoulder , elbow, wrist, thigh, ankle etc.
- the state of the art can also be illustrated by teaching documents FR 2 875 140 A1 and FR 2 619 723 A1 .
- These documents disclose apparatus for training and re-educating the lower limbs, and in particular the knee for the document FR 2 875 140 A1 , which use rotatable members.
- Such apparatus and system have the disadvantage of being bulky and difficult to transport, besides they are limited to the exercise of the lower limbs, or even only the exercise of the knee, using such a movable member in rotation.
- multi-purpose devices that can perform several functions successively, by adding two separate devices.
- these devices can not simultaneously perform bi-directional, multidirectional or multidirectional movements or efforts, in the sense that they do not make it possible to simultaneously perform bidirectional or multidirectional movements or efforts.
- the document US 2007/0299371 A1 discloses an exercise apparatus adapted to guide a patient to perform a movement along a determined spatial trajectory.
- This apparatus includes a telescopic arm limited in terms of range of motion and is therefore intended for learning gestures on small amplitudes.
- This device is therefore not very suitable for joint rehabilitation which requires much greater amplitude possibilities.
- this telescopic arm is limited in terms of radial forces by its mechanical design. Indeed, this telescopic arm is poorly adapted to resume radial forces too strong, and thus limits the exercises to very low radial forces.
- This device is not suitable for muscle building exercises that require significant effort.
- the barycentre of this device varies significantly in operation, thus requiring particularly expensive compensation mechanisms, complex and cumbersome, namely servo mechanisms of the motors and the rudder brake.
- the apparatus described in the document US 2007/0299371 A1 is a solution with four degrees of mobility of which at least three are motorized which is particularly expensive and cumbersome, especially with a work table, and therefore limited to clinical or hospital type rehabilitation centers.
- the clutter of the work table also prevents work in space.
- This device has the advantage of being lightweight and compact, transportable or portable, mainly comprising the hollow body, the motor means and the movable member.
- the bulk of such a device lies essentially in the bulk of the body, when the arm is retracted at least partially inside the body; the motor medium being advantageously fixed on the bottom of the body, inside or outside the body.
- this device is easily transportable by hand or in a car, allowing for example a therapist or a sports trainer to move with one or more devices according to the invention and to go to the home of his patients or clients to have them perform exercises on these devices.
- the positioning of the motor means and the means of cooperation on the bottom of the body thus makes it possible to stabilize the center of gravity on the rear of the apparatus, and thus to shift the weight of the apparatus to the frame with the advantage of minimizing weight changes in operation, during exercises.
- the motor means is disposed in a housing integral with the crop, and the cooperation means is fixed on the housing in question, so that the cooperation means is disposed substantially between the removable means and the motor means.
- this device is suitable for simultaneously making bidirectional movements or efforts, multidirectional or multidirectional, allowing to perform an effort according to several degrees of freedom.
- the movable member provides a first degree of freedom vis-à-vis the body, and the hinge means provides at least one additional degree of freedom.
- the device can be used in the rehabilitation (or fitness) of the majority of the patient's muscles.
- the user can choose the work plan by adjusting the position of the body on the frame, thanks to the removable means for removable mounting of the body on a support which is adjustable in translation on a frame.
- the movable member By combining the mobility of the movable member in translation, the one or more degrees of freedom in rotation produced by the articulation means, and the possibility of adjusting the position (eg height or vertical position) of the apparatus, a a multitude of combinations and movements for the patient can be envisaged, with the patient being able, for example, to be in a lying, sitting or standing posture, and with the apparatus (in other words the body of the apparatus) which can be positioned adjustable horizontally, vertically or inclined.
- This device thus makes it possible to make the user work in a quasi-half space, of approximately - 90 ° to + 90 ° in horizontal and approximately - 90 ° to + 90 ° in vertical.
- This apparatus advantageously makes it possible to perform aerobic exercises. With this device, it is indeed possible to work with an effort during a part of the exercise and so avoid to copy its exhalation on the effort and to regulate its breathing on the exercise and thus its heart rate on the breathing. Respiration and heart rate are therefore decoupled from the effort. Gaseous exchanges (oxygen supply to the muscle) are therefore optimized, thus allowing exercises to be performed without a consequent need for prior cardiovascular heating.
- This device allows the practice of physical training and / or rehabilitation to populations unable to perform a warm-up beforehand.
- the toxins generated during the efforts are also drained out of the muscle more effectively, thus avoiding a consequent need for muscle stretching after the exercises, while avoiding the traumas of the following day such as body aches.
- This device therefore allows populations unable to perform a cardiovascular warm-up before exercise and / or stretching after exercise to practice this type of physical training and / or rehabilitation.
- this apparatus makes it possible to work on a single chain of muscles without the antagonistic muscle chain being solicited under load in the exercise.
- the device can provide energy, or resist energy, in a moving direction of the movable member and ensure a return to the initial position without the user having to develop effort.
- Such a work makes it possible to exercise a muscle or a muscular chain precisely without loading the muscles of the antagonistic chain, thus opening the practice of physical training and / or rehabilitation to people who have muscular trauma or problems of articulation, tendon or bone.
- This device can of course be programmed to solicit several muscles and also involve several chains of muscles during the same exercise. It is thus possible with this device to work antagonistic chains, for balancing, muscle development or time saving.
- the hinge means is designed to provide two degrees of freedom in rotation about respectively two axes of rotation, in particular perpendicular to each other; one of the axes of rotation possibly coinciding with the main axis of translation.
- the articulation means comprises a first pivot connection along the main axis connected to a second pivot connection along a transverse axis perpendicular to the main axis.
- the or each articulation means further comprises at least one adjustable stop limiting the rotation of the body about at least one axis of rotation, so that said stop allows to define an adjustable angle range for the rotating said body about the corresponding axis of rotation.
- the hinge means makes it possible to limit the rotation of the body about the axis of rotation concerned and thus to define an angle range for the rotation about the corresponding axis of rotation, so as to limiting the movement of the user's body part within a certain corner sector, or even within a given freedom cone when two degrees of freedom in rotation are limited.
- the body supports at least one secondary motor means capable of rotating the body about an axis of rotation, said secondary motor means comprising at least one angle sensor around its axis of rotation. .
- the or each angle sensor may be connected to a control means for controlling the or each secondary motor means so as to constrain the body part of the user to follow a defined path, said angle sensor being able to be associated a displacement sensor of the movable member to be able to locate the movable member in the space; the control means for performing a step of controlling the path of the movable member in space.
- the apparatus has a connection means adapted to connect said part of the body of the user to said movable member so that the user can impose a displacement force on said movable member and vice versa.
- the connecting means corresponds to one of the means chosen from a spherical handle, a ball-and-socket handle, a pivoting handle, a strap, a gripping surface formed on one end of the movable member, and any other equivalent gripping means for both pulling and / or pushing the movable member.
- the connecting means is adapted to the part of the body to be exerted, so that it is advantageous for the connecting means to be interchangeable.
- the connecting means is removably attached to the movable member to allow this interchangeability.
- the apparatus allows in particular to perform exercises on including the lower and upper limbs, without for example an exclusive use to one or the other member. Work exercises involving other parts of the body (pelvis, back, etc.) can also be performed with this apparatus, for example by means of a strap.
- the body internally supports guide means of the movable member to support the radial forces perpendicular to the main axis and guide said movable member in its translational movement.
- the device can perform muscle building exercises that require significant effort.
- the guidance of the movable member is substantially isostatic, thus ensuring optimal recovery of radial forces and allowing the device to withstand substantial radial forces.
- the motor means comprises a rotary motor, a threaded shaft rotated by the motor and a nut forming part fixed on the movable member and provided with a threaded hole cooperating with the shaft. threaded, and that the nut piece is secured to the slide.
- the body is for example of a length between 700 and 1500 mm, preferably between 1000 and 1200 mm.
- the movable member has for example a maximum travel distance of between 500 and 1000 mm, preferably between 700 and 800 mm.
- the apparatus further comprises display means adapted to perform a step of displaying the evolution of the main exercise parameter and / or of at least one setpoint parameter during the exercise so that to inform the user and / or a third person of the evolution of this or these characteristic parameters of the exercise performed by the user, said display means being in particular realized in the form of a screen or of a monitor or set of light-emitting diodes on or off the device.
- This display makes it possible to follow in real time the work performed by the user, either for a third party practitioner or sports trainer anxious to control the exercise in progress, possibly to modify the exercise en route according to curves displayed by the display means.
- the apparatus further comprises a transmission means adapted to perform a data transmission step reflecting the evolution of the main exercise parameter and / or at least one setpoint parameter during the exercise at destination.
- a transmission means adapted to perform a data transmission step reflecting the evolution of the main exercise parameter and / or at least one setpoint parameter during the exercise at destination.
- an external terminal in particular of the telephone and / or computer terminal type, in order to inform a third party located at a distance from the user of the evolution of this or these parameters characteristic of the exercise performed by the user, said transmission means being in particular of the type wired transmission or wireless transmission.
- a remote person such as a practitioner or a sports trainer
- This guide means thus allows the user to be guided in his exercises in a visual way (with for example a screen positioned in front of him) and / or in a sound manner (with for example a loudspeaker that emits prerecorded sentences) , with the issue of written or spoken sentences of the informative type (such as "you have five minutes left” or “go slower") or type intended to encourage the user (such as "you will beat your record ").
- the device is for example equipped with integrated man-machine interfaces (such as a screen, a keyboard, a speech synthesizer, a microphone, etc.) and communication devices (such as a touch screen, a computer, etc. .) that allow entry or recording of setpoint curves and data transfer before and after exercise. It also provides the user and his immediate or distant entourage with sound, visual and graphical data in real time during the exercises.
- integrated man-machine interfaces such as a screen, a keyboard, a speech synthesizer, a microphone, etc.
- communication devices such as a touch screen, a computer, etc. .
- Such a device is particularly advantageous because the combination of such a frame and such an apparatus allows to choose his work plan from an infinity of solutions. Indeed, this device allow work in a complete half-space, limited by the frame that supports the support.
- the apparatus and device according to the invention allow the work of the upper limbs, lower limbs and also the trunk (work spine) with a single equipment.
- This method thus controls in slaving a movable member moved or braked in translation, thus making it possible to perform linear movements according to a predefined setpoint curve.
- the enslavement aims essentially at the fact that the real curve is getting closer, with a certain tolerance, to the setpoint curve; said setpoint curve corresponding to an objective to be achieved by the user, during the exercise, in terms of effort during movement of the movable member.
- the movable member is able to push and pull the member, and also to withstand a force exerted by the body of the user on the movable member in both directions of movement; during a cycle (movement with return to the starting point) the main exercise parameter may vary depending on the setting.
- the programming of the effort thus makes it possible to have a multifunctional device, the same method (or device) that can be used for, for example, all the members of the user, lower and upper, and other parts of the body (hip , basin, etc.).
- the programming of the effort offers many physiological advantages for the user: the set-point curves (as for example curves of effort or velocity according to the displacement of the mobile organ) are entirely programmable or parameterizable by the user or by a practitioner, such as a physiotherapist, or by a sports trainer.
- the exercise corresponds to a static work because the user will exert an effort, or will resist a effort, so that the point of contact of his body and the movable organ will remain motionless in space.
- the exercises correspond to work in dynamics with a displacement of the movable member vis-à-vis the body of the user.
- control method makes it possible to modify the exercise (by modifying or replacing the setpoint curve) or to stop the exercise in case, for example, of fatigue or of user failure; we then speak of a process (or device) of self-adaptive exercise because the exercise automatically adapts itself to the user according to a protocol or a preset parameterization.
- the setpoint curve or curves can be curves of effort (or counter-force) as a function of the displacement of the movable member or time.
- the servocontrol of the motor means ensures the respect of the main parameter of effort, or counter-force, and the speed of the movable member is a resultant taken into account to ensure a range of operation or to view or save the data; the speed being here a predetermined setpoint parameter.
- the setpoint curve or curves may be velocity curves of the movable member as a function of the displacement of the movable member or time.
- the motor means ensures compliance with the main speed parameter, and the effort is a consequence whose measurement ensures a range of operation and can be displayed or recorded; the force here being a predetermined setpoint parameter.
- control method comprises a step of receiving at least one instruction issued by the user or a third party, and a step of modifying or changing the setpoint curve according to said instruction in order to modify the current year or replace the current year with another year.
- This step of modifying or replacing the setpoint curve is of the same type as step f) described above; the only difference being the origin (or starting point) of the step, namely the reception of a setpoint sent by an individual in this case and a variation of a setpoint parameter in the case of step f ). It is of course conceivable that these two steps are carried out in parallel.
- a practitioner such as a physiotherapist, or a sports trainer can intervene on the exercise by forcing the control means to modify the exercise, the goal being for example to adapt the exercise according to the user placed under the observation of the practitioner or the sports trainer.
- the user can modify the exercise himself on the road according to his physical impressions of the current exercise.
- the apparatus may thus comprise means for receiving an instruction adapted to perform the reception step in accordance with the control method.
- the user as well as the therapist or sports trainer can thus intervene in real time during an exercise to modify one or more parameters, such as, for example, the effort or the speed as the main parameter of exercise.
- the user therefore completely controls his exercises and can adapt them voluntarily within a unitary movement to accelerate, increase the force, add iterations or time, lengthen or shorten a movement (ie say increase or decrease the amplitude of a translational movement of the movable member) and see the modification taken into account in real time.
- this exercise protocol allows to exercise the user's body part with at least two predetermined distinct phases; these phases being characterized in particular by the associated setpoint curves which have been recorded or entered by possibly a practitioner, such as a physiotherapist, or a sports trainer, depending on the pathology to be treated and / or training adapted to the 'user.
- a drive may thus consist of a programmed movement according to a given setpoint curve, itself repeated according to a defined number of iteration (or cycle). Some parameters of this initial exercise may change depending on one or more selected setpoint parameters.
- Some exercises of different types can be combined within the same exercise protocol; the complete exercise protocol that can be represented in a control algorithm.
- the conditions of linking from one exercise to another exercise and the number of exercise cycles may depend on the predetermined setpoint parameter (s).
- Such an exercise protocol the user works his part of the body in a single direction of translation, thus making it possible to work a very specific muscle chain, without making the antagonist muscle chain work.
- Such a protocol may also be intended to make more specifically work a joint of an upper or lower limb.
- the setpoint curve (as recorded or entered or possibly as replaced or modified) corresponds to the predefined variation of the predetermined main exercise parameter as a function of the displacement of the movable member, said variation effected only within a predetermined range of movement between a predetermined minimum value and a predetermined maximum value of the displacement.
- an exercise protocol defines an exercise phase during which the motor means is controlled to move the movable member according to a predefined setpoint curve only within a range of displacement. selected from the movable member.
- the movable member does not move over its entire stroke (that is to say between the retracted position and the deployed position), but moves on a reduced stroke, typically between two intermediate positions associated with corresponding minimum and maximum values.
- control method comprises a step of locating the movable member in space, and a step of controlling the position of the mobile member in the space in order to constrain the user to follow, with the mobile organ, a trajectory delimited in space during the exercise.
- control method and the associated apparatus make it possible to control the motor means and the secondary motor means or means in order to control the movement of the movable member around a predefined path, allowing work in the space of the part of the user's body (usually an upper or lower limb), with the advantage of working specific muscle chains, according to a program or exercise protocol chosen.
- the invention relates to an exercise apparatus 1 adapted to the rehabilitation and / or physical training of a body part of a user, such as an upper limb and / or lower.
- This apparatus 1 is adapted to work the upper and lower limbs of the user, as well as other parts of the body such as the hips or the pelvis.
- this apparatus 1 is also designed to perform muscle and joint exercises of the member in question.
- the body 2 is an elongated body along the main axis A which has the open end 20 and a bottom 21 on the end opposite to the open end 20.
- the body 2 is made from two half-shells assembled together; these two half-shells being for example made by molding a plastic material or by deformation of a metal sheet.
- the body 2 delimits internally an elongate cavity 22.
- the body 2 supports a means of cooperation 6 between the body 2 and a frame, such as for example a gantry, a wall or the floor or any other fixed element.
- This cooperation means 6 is disposed on the bottom 21 at the other end of the body 2 opposite to the open end 20.
- the cooperation means 6 comprises a hinge means 60 offering two degrees of rotation for the body 2 around respectively two axes of rotation perpendicular to each other, one of the axes of rotation coinciding with the main axis A of the body 2.
- This articulation means 60 comprises for example a first pivot connection 61 along the main axis A connected to a second pivot connection 62 along a transverse axis perpendicular to the main axis A.
- this articulation means 60 offers the arm 3 two degrees of rotation in addition to the degree of freedom in translation, thus allowing the arm 3 to be guided in the space inside a cone of freedom.
- the stops are adjustable or positionable, automatically or manually, in order to adjust the angular sectors SA1 and SA2 on a range between 0 and 360 °.
- the articulation means 60 offers more than two degrees of freedom (for example three) by providing more than two pivot links; the number of pivot links and the orientation of the respective axes of rotation contributing to delimit a space within which the user can move the arm 3.
- the stops can be provided with a security system so that, beyond a predetermined force printed by the user on an abutment, the corresponding security system is triggered by releasing the stop, c ' that is to say, leaving the user out of the angular limitation defined by the abutment in question.
- a security system is advantageously designed to return to the initial position, that is to say that it is possible to reset the security system (after release) so that the stop finds its primary function of angularly locking the pivot connection corresponding.
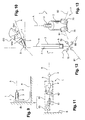
- Such articulation means 60 is also schematically illustrated in FIG. figure 11 , wherein the cooperation means 6 further comprises a removable means 63 for mounting and dismounting on a support, such as for example a support (not illustrated) slidably and adjustably mounted in frame B, in order to connect the means of articulation 60 to the frame B via said removable means 63 and to be able to adjust the position (vertical or horizontal) of the apparatus 1 by adjusting the position of this support in the frame B.
- a support such as for example a support (not illustrated) slidably and adjustably mounted in frame B
- the detachable means 63 is fixed on the movable support and is for example made in the form of a clipping means, removable collapse, screwing, suction cup or any other equivalent means. It is thus possible to fix the body 2 of the apparatus 1 in a removable manner on the mobile support via this removable means 63, in order to be able to assemble and dismount easily and quickly the apparatus 1 on the frame B.
- the hinge means 60 and the removable means 63 are reversed in position, that is to say that the removable means 63 is fixed directly on the body 2 while the hinge means 60 is fixed directly to the movable support in the frame B.
- the cooperation means 6 is slidably mounted in a support (not visible) guided in translation in a rail R fixed on the frame B (wall and / or floor) in order to adjust the position of the apparatus 1 vis-à- screw frame B in particular depending on the morphology of the user and / or the exercise to be performed and / or the member to exercise.
- the removable means 63 allow mounting and disassembly on the carrier, the carriage type, slidably mounted in the rail R integral with the frame B.
- the cooperation means 6 may be fixed on a heavy mass, of the cast type, or on a gyroscopic inertial mass, and not directly on a frame.
- the device 1 can be detached from its support (frame, heavy mass, trolley, rail or gantry) and then be stored or transported. It is also conceivable to motorize the movement of the apparatus 1 on the rail R to ensure automatic positioning of the apparatus 1 in the rail R.
- the articulation means 6 may also be in the form of a single ball joint having three degrees of freedom in rotation.
- the cooperation means 6 is in the form of a spherical piece or a point connection.
- This spherical piece can come into specific support against a flat surface, such as a wall or the floor, thereby providing three degrees of rotation to the device 1.
- This spherical piece can also engage inside a spherical cage fixed to a frame, thus providing a pivot connection with three degrees of freedom in rotation for the apparatus 1.
- the arm 3 is an elongate member slidably mounted inside the body 2.
- the body 2 internally supports means for guiding the arm 3 in order to support the radial forces perpendicular to the main axis A and to guide the arm 3 in its translational movement.
- the guiding means comprise rails fixed on the body 2, in the cavity 22, where a carriage integral with the arm 3 slides.
- the body 2 has a length of between 700 and 1500 mm, advantageously between 1000 and 1200 mm.
- the arm 3 has a maximum travel distance of between 500 and 1000 mm, preferably between 700 and 800 mm.
- the movable member is in the form of a telescopic arm.
- connecting means 4 in accessory of the apparatus 1 to make the connection between the arm 3 and the different parts of the body of the user; said connecting means 4 being adapted to the part of the body (limb or other) to be exerted, such as for example the elbow, the knee, the hand, the ankle etc.
- the connecting means 4 are removably attached to the arm 3 to be able to assemble, disassemble, interchange and replace each other.
- the motor means 5 optionally comprises a speed variator 52 for the motor 150; said drive 52 being of the reversible electric type with an equally reversible power supply connected to the sector S.
- the power supply 52 must be reversible in voltage and current so that, in braking mode of the motor 50, the energy can be either dissipated is sent back to the power grid.
- the motor 50 is then connected to the arm 3 via the conversion means 51 reversible.
- the motor 50 When the electric reversible motor 50 operates in braking mode, that is to say when the motor 50 must exert on the arm 3 a force opposite to the direction of movement of the arm 3, the motor 50 manufactures (or generates) current electric.
- This electrical power thus generated by the motor 50 is for example dissipated in the form of heat through a load or variable resistor 53 visible in figure 25 . Without power supply, the braking does not work and therefore the arm 3 can move freely under the effect of its own weight.
- the motor 150 operates only in the two quadrants Q1 and Q3 described above.
- the generator mode is no longer used with respect to the "four-quadrant reversible" embodiment, the braking is carried out by creating a resistive torque in the motor 150.
- the principle is thus to create a torque (or a force) which opposes the displacement of the motor 150 to rotate in order to slow down the movement.
- the motor 250 operates all the time in motor mode and the conversion means 251 are not reversible. If an effort is exerted on the arm 3, the mechanical conversion means 251 will automatically block the displacement of the arm 3 due to this effort by the internal mechanical friction of the conversion means 251, as schematically illustrated by the arrow RM translating the internal mechanical resistance by friction of the conversion means 251.
- the motor 250 In the case where the motor means 5 must create a force to move the arm 3, the motor 250 must provide, in addition to the effort required to move the arm 3, an additional effort necessary to overcome the internal mechanical friction of the conversion means 251. In the case where the motor means 5 must oppose a movement of the arm 3, the engine 250 will eventually operate in engine mode to accompany the external force applied to the arm 3. Without power supply, the arm 3 is locked in position due to internal friction of the conversion means 251.
- the motor 350 operates all the time in motor mode and the conversion means 351 are not reversible.
- the motor 350 is not electrically powered and the mechanical brake 354 takes care of creating a counter-force which opposes the displacement of the arm 3.
- the Figures 4 to 8 illustrate different embodiments of the motor means 5 of the "four-quadrant reversible" type adapted to translate the arm 3 in translation and to brake the movement of the same arm 3.
- the arm 3 is an elongated hollow piece, open at its second end 32 and guided in translation in the body 2 via guiding shoes 23 fixed in the body 2 and surrounding the arm 3.
- the conversion means 51 extend into part inside the arm 3.
- the rotation of the motor shaft 500 rotates the pulley 512 via the belt 510, and said pulley 511 rotates the toothed wheel 512 which, by turning, translational moves the arm 3 via the rack 513.
- the motor shaft 500 extends along an axis perpendicular to the main axis A. As illustrated, the motor 50 optionally exceeds the body 2 via a suitable opening in said body 2.
- the threaded shaft 514 and the nut piece 516 together form a screw / nut system for converting a rotational movement into translation movement: the rotation of the threaded shaft 514 causes the translation of the nut member 516 which drives in translation the arm 3.
- the threaded shaft 514 extends along the main axis A.
- the rotation of the drive shaft 500 rotates the belt 517 around the rollers 518, so that the connecting piece 519 is driven in translation between the two rollers 518 delimiting the long flat portion of said belt 517, thereby causing in translation the arm 3.
- the rotation of the motor shaft 500 rotates the belt 519 around the pulley 520 and the roller 521, so that the connecting piece 522 is driven in translation between the pulley 520 and the roller 521, thereby causing translation the arm 3.
- the motor means 5 can also comprise a speed reducer 501 visible in particular at Figures 4b , 6b and 7b .
- the reduction of speeds can be achieved by adjusting the transmission ratio between the two bevel gears 523.
- the conversion means 51 must be easily displaceable by the user, preferably under a force of less than 5 or 1 newton, in the case where the motor 50 is stopped or does not work.
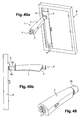
- FIGS. 46 to 52 illustrate a preferred embodiment of an exercise device and an exercise apparatus according to the invention.
- the frame B is in the form of a vertical gantry having a rail R in which is slidably and adjustably mounted a support S made in the form of a slider.
- the apparatus 1 is removably mounted on this support S.
- the apparatus 1 comprises a housing 26 fixed on the bottom 21 of the body 2 and in which the rotary motor 50 is mounted.
- the slider 28 is in the form of a disc provided with three holes for the passage of the respective tie rods 27, so that the translation of the nut member 516, and thus of the slider 28 integral with this nut piece 516, be guided by the tie rods 27.
- the cooperation means 6 comprises a hinge means 60 made in the form of a double pivot link having two degrees of freedom in rotation.
- This articulation means 60 is mounted on the bottom 21 of the body 2, and more specifically on the housing 26 of the motor 50 after the motor 50.
- the connecting means 4 is made in the form of a handle possibly provided with switches 40 for controlling various functions of the apparatus.
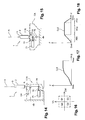
- FIG. 12 and 13 schematically illustrate another type of apparatus 1 according to the invention.
- the cooperation means 6 comprising a hinge means 60 is completed or replaced by another means of cooperation 7 which comprises two secondary motor means 70 able to rotate the body 2 around respectively two axes of rotation B1, B2 perpendicular to each other, the two axes of rotation B1, B2 being perpendicular to the main axis A of the body 2.
- another means of cooperation 7 which comprises two secondary motor means 70 able to rotate the body 2 around respectively two axes of rotation B1, B2 perpendicular to each other, the two axes of rotation B1, B2 being perpendicular to the main axis A of the body 2.
- a third secondary motor means adapted to rotate the body 1 about an axis of rotation parallel to the main axis A (or another predefined axis), or to have only one of the secondary motor means 70.
- Each secondary motor means 70 is fixed on the body 2, for example outside the body 2 of the apparatus 1, as schematically illustrated in FIG. figure 13 .
- Each secondary motor means 70 is adapted to rotate the body 2 in both directions of rotation, and also to brake rotation of the body 2 in both directions of rotation.
- the or each secondary motor means 70 comprises a reversible rotary motor provided for four quadrant operation.
- Each secondary motor means 70 comprises an angle sensor for determining the angle of rotation of the body 2 about the associated axis of rotation B1, B2, thus making it possible to determine the angular position of the body 2 vis-à-vis this rotation axis.
- Each secondary motor means 70 is thus designed to ensure a radial movement transmission and the rotational power of the motor is calculated according to the lever effect of the body 2 and arm 3 together.
- the support 75 is disposed above the hinge 74, in other words between the body 2 and the hinge 74; while in the embodiment of the figure 15 the support 75 is disposed below the hinge 74, ie the hinge 74 is disposed between the body 2 and the support 75.
- the motor 71 moves the control shaft 72 in translation T so that this control shaft 72 rotates the workpiece. pivoting 73, and thus the body 2, around the support 75, as shown schematically by the arrow R.
- the assembly of the secondary motor means 70 can be disposed inside a box CA, illustrated by mixed lines on the Figures 14 and 15 from which protrudes the free end of the pivoting piece 73 on which the body 2 of the apparatus 1 will be connected.
- the secondary motor means 70 comprises a rotary / gear motor assembly in direct contact with the body 2.
- a secondary motor means which drives in translation the body 2 along an inclined axis (for example at right angles) with respect to the main axis A.
- Such a secondary motor means in translation could be coupled with a secondary motor means as described above, that is to say which rotates the body 2.
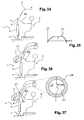
- This or these secondary motor means 70 thus make it possible to constrain the part of the body of the user to follow a delimited trajectory T in space. Such a constraint around a trajectory T is described at the end of the second part with reference to the Figures 34 to 37 .
- the apparatus 1 is provided with means for implementing the method, these means comprising a control means 80 made in the form of a control unit or central unit. (visible at Figures 24 to 30 and 31).
- the setpoint curves can advantageously be downloaded from the Internet or an electronic message sent by a therapist or a sports trainer, then transferred from the user's computer terminal to the storage means 81. device 1.
- measuring means 83, 84, 85 are of course connected to the central unit 80 to perform step b).
- the input means and / or the storage means 81 are connected to the central unit 80; the central unit 80 being also connected to the motor means 5 (as visible to the Figures 24 to 27 ) in order to perform step c) of controlling the motor means 5 in a controlled manner around the setpoint curve stored in the storage means 81.
- the set-point curves C C correspond to curves programmed according to the therapeutic, physiological or physical objectives sought for the user or the therapist or the sports coach.
- the device 1 is thus multifunctional and scalable according to the needs of the therapist, the sports trainer or the user, by playing on the setpoint curve or C C.
- the Figures 17 to 23 illustrate different set curves C C 1 to C C 7 may be recorded for exercise on the device 1 according to the invention.
- the Figures 17 to 21 illustrate curves of setpoint C C 1 to Cc 5 in effort, that is to say, curves of variation of a force F as a function of the displacement D of the arm 3, in other words according to the position of the arm 3 relative to the 2.
- the main exercise parameter P P corresponds to the force F (which may be the force directly applied by the user to the arm 3, or the force developed by the motor means 50 to move or brake the arm 3) and the state parameter P E is the displacement D (the time t being also possible for such a curve in effort).
- the different set-point curves define a variation of an exercise principal P P (for example the force F) as a function of the displacement D of the arm 3 within a predefined movement range.
- This displacement range is delimited by a predetermined minimum value Dmin and a maximum value Dmax of the displacement of the arm 3.
- the minimum value Dmin can be associated with the retracted position of the arm 3 and the maximum value Dmax can be associated with the extended position of the arm 3 and in this case the displacement range corresponds to the maximum (or total) stroke of movement of the arm 3. It is also conceivable for one or each of the values Dmin and Dmax to be associated with an intermediate position of the arm 3 situated between the two end positions (retracted position and extended position), so that the range of movement of the arm 3 corresponds to a reduced stroke less than the maximum travel stroke of the arm 3. By adjusting the values Dmin and Dmax, it is thus possible to limit the exercise to a chosen range of movement of the arm 3, and for example to limit the exercise to a selected angular sector of a joint.
- set-point curves C C 1 to C C 4 represent a half-cycle of movement of the arm 3, for example a displacement of the arm 3 from the retracted position to the deployed position or a displacement of the arm 3 from the deployed position towards the retracted position; a complete cycle corresponding to a forward and backward movement of the arm 3.
- the setpoint curve C C 1 corresponds to an increase in the force F as the displacement D of the arm 3 increases, for example as the arm 3 leaves the body 2.
- the figure 19 also illustrates the movement of an upper limb MS (or arm) during the three phases of this exercise, with arrows F illustrating the effort F undergone by the upper limb MS when moving the movable arm 3 of the apparatus 1.
- the setpoint curve C C 4 corresponds to a linear increase of the force F at the beginning of the displacement up to a first level (situated at the value of 350 N for example), followed by a linear decrease in the effort F up to a second level (located at the value of 150 N for example), also followed by a linear decrease of the force F up to a third level (situated at the value of 30 N for example), and concluded by a last linear of the force F up to the abscissa axis at the value of 0 N.
- This setpoint curve C C 4 has particular interest for working the body part of the user with degressive force levels.
- This setpoint curve C C 5 thus represents a complete cycle of movement of the arm 3; the first half-cycle corresponding to the first portion of curve C1 and the second half-cycle corresponding to the second portion of curve C2.
- the device 1 makes it possible to work in both directions of translation of the arm 3, that is to say to provide an effort or a resistance to a compressive and tensile force as described above in the first part of the description.
- the first curve portion C1 is of the same type as the setpoint curve C C 2 described above with reference to FIG. figure 18
- the second curve portion C2 is also of the same type as this setpoint curve Cc2, with the same advantages as described above in the two translation directions of the arm 3.
- curve C1 and C2 corresponding to a tensile force and compression (or thrust), are completely independent of one another; each curved portion being separately configurable and independent of the other portion of the curve, depending on the pathology to be treated and / or the training adapted to the user.
- the parameters representative of the curve portions C1 and C2 illustrated in FIG. figure 21 can be distinct between the two parts of the curve C1 and C2.
- the Figures 22 and 23 illustrate curves of setpoint C C 6 and C C 7 in speed, that is to say curves of variation of the speed V of displacement of the arm 3 as a function of the displacement D of the arm 3 (or possibly of the time). These setpoint curves C C 6 and C C 7 are illustrated only for a half cycle of movement of the arm 3.
- the setpoint curve C C 6 corresponds to an increase in the speed V at the beginning of the displacement followed by a decrease in the speed V.
- the setpoint curve C C 6 corresponds to an increase of the speed V to a speed step, followed by a return to zero at the end of the displacement.
- the user works in iso-kinetics, that is to say at constant speed.
- the parameters of the setpoint curve Cc are simply programmed by the user, the therapist or the sports trainer according to the needs of rehabilitation or training. The user who will do the exercise will only have to perform the exercise without constraint.
- the choice of the setpoint curve C C may relate to the desire to perform aerobic work.
- a force setpoint curve will make it possible to provide recovery zones within the exercise itself (such as the third phase PH3 of the curves C C 2 and C C 3 described above) and the rhythm of the effort will be studied not to unbalance the respiratory rhythm for a good oxygenation of the muscles and to avoid the manufacture of toxin; toxins mainly from muscle work without oxygen, that is to say anaerobic.
- the setpoint curve can be programmed so that the respiratory and cardiac rhythms are no longer modeled on the entire effort phase.
- the choice of the setpoint curve C C can also relate to the desire to avoid violent efforts: with the programming of the effort, there is no more violent effort, but a gradual increase in power up to maximum effort preset as in the case of curves and Cc2 C C 3 described above.
- the jerks are removed and the effort is progressive which requires less tendons, joints and heart, making the exercises accessible to people with cardiovascular recommendations.
- the choice of the setpoint curve C C can also relate to the wish to work a desired muscle chain: the effort is targeted for one or more selected muscle chains, the others not being requested are at rest. The exercise therefore seems more flexible and more enjoyable for the user. It becomes possible to work a unique kinetic chain.
- the programming can target the effort on a precise range of muscle displacement to work only a few muscle fibers and solicit the others to a minimum, for example in the case where the user has muscle problems.
- the advantage of being able to program the setpoint curves C C is to be able to suppress the accompanying effort of the return so as to make work only one group of muscles without soliciting the antagonistic chains, as in the case Cc2 of the curves C and C 3, or conversely to have a stress on the return, as in the case of curve C C 5.
- the second part of curve C2 (effort upon return) is programmed to record in the continuity with the first part of curve C1 (effort during the outward) so as not to undergo jolts during the reversal of the direction of movement.
- the apparatus 1 advantageously allows to associate a traction force with a thrust force. This means that the apparatus 1 will be able to work two very distinct chains of muscles in the same movement, while eliminating the discontinuities injurious efforts to the joints, tendons, heart, etc. and thus make the session much more pleasant. Such programming also saves time by 50% of the exercise time by working two separate chains of muscles in the same movement.
- these or these third measurement means are connected to the central unit 80 to perform the step d) of measurement.
- the physiological sensor (s) 86 which will notably monitor the rhythm of the heartbeats and the blood pressure of the user, are mainly used to add safety monitoring in the context of at-risk or weakened persons.
- the physiological parameter (s) P PHY collected during the exercise are thus exploited in real time for the adaptation of the exercise to the user, that is to say that these data can, according to pre-established programs (definition of threshold values and predetermined time period and / or predetermined portion of the displacement D of the arm 3) to change in real time the rehabilitation program or training.
- these physiological data can also be returned in real time to the user, and possibly to a therapist or sports trainer, or recorded for later return to these same people. This data can then be used to make adjustments to successive exercise programs within the same session or for subsequent sessions.
- the device 1 is therefore of the adaptive type because it can potentially adapt to the physical and pathological characteristics of the user before the session, offer programs or the exercise will be dependent in real time on the subject's attitude, and offer proposals for the evolution of the initial protocols.
- the method also comprises a step of receiving at least one instruction issued by the user or a third person, such as a therapist or a sports trainer, and a step of modifying or changing the setpoint curve C C according to said instruction.
- the apparatus 1 comprises means 97 for receiving an instruction connected to the central unit 80 and adapted to perform the reception step described above, the central unit 80 being of course adapted to performing the step of modifying or changing the setpoint curve C C according to said instruction.
- step f) of the method it is possible to modify the exercise en route on instruction of the user, the therapist or the sports trainer; modifying the exercise corresponding to the same type of modification as that described below for step f) of the method.
- the user may wish to harden the exercise, increasing the effort, if he feels fit.
- the user can adapt the exercise voluntarily within a unitary movement to accelerate, increase the force, add iterations or time or lengthen a displacement and have the modification taken into account in real time .
- the method comprises a step of displaying the evolution of the main exercise parameter P P and / or at least a setpoint parameter P C during the exercise to inform the user and / or a third person of the evolution of this or these parameters characteristic of the exercise performed by the user.
- the apparatus 1 comprises a display means 88 connected to the central unit for displaying the evolution of the parameter (s) P P and / or P C during the exercise.
- the display means 88 may be in the form of a screen or a monitor or a set of light-emitting diodes arranged on the body 2 of the apparatus 1 or outside the body 2.
- the interest is to show in real time how the user behaves on the programmed exercise, so that the user can modify his behavior in real time or so that a therapist or a sports coach can send an instruction to the CPU 80 to modify the exercise in real time; the goal being again to adapt the exercise to the user.
- the method comprises a data transmission step reflecting the change in the main exercise parameter P P and / or at least one setpoint parameter P C during the exercise to an external terminal. , in particular of the telephone and / or computer terminal type, in order to inform a third party located at a distance from the user of the evolution of this or these parameters.
- the apparatus 1 comprises a transmission means 89 connected to the central unit 80 and adapted to perform this transmission step.
- the transmission means 89 may be of the wired transmission or wireless transmission type.
- the interest is to allow a remote person to follow the exercise of the user, for example via a computer network (internet, intranet or equivalent); this person can then, depending on the evolution of the transmitted parameter or parameters, send a setpoint to the central unit 80 to modify the exercise in real time.
- the transmitted data can be stored (for example on an external computer terminal or on the storage means 81) for later analysis, in particular to establish comparisons between the different exercise sessions, change the subsequent exercises and establish diagnoses.
- the figure 29 illustrates the third party TP, possibly located at a distance from the user U who performs the exercise, where the third person TP receives or displays data via the display means 88 and / or the transmission means, and where the third party person TP sends an instruction to the central unit 80 via the receiving means 97.
- the exercises can be done in a specialized room (physiotherapist's office, institute, weight room, fitness club, etc.) or at home.
- Exercise programs or protocols can be downloaded remotely via the Internet network. All the data on the execution and results of an exercise can also be downloaded remotely via the internet.
- the physical equipment, the conversation modes and the site form an application set that allows to have his personal exercise protocol performed by a professional from the data including pathological, physiological or physical.
- the data of the exercises performed in real time and transmitted via the means of transmission 89 allow to have a real interaction between the user and the professional third person during the exercise.
- the coupling with an on-line camera (especially of the webcam type) allows the professional to indicate to the user corrections of postures and movements.
- the data relating to the performed exercise can then be downloaded by the professional at the end of the exercise, allowing the latter to adapt the exercise protocol between each session.
- the user, the sports trainer or the therapist have the possibility to register on a website and to download online C C setpoint curves and exercise programs or protocols according to the desired objectives for therapeutic purposes. , muscle development, physical maintenance or weight loss.
- These people can also download the results of the user (evolution of the real curves) in real time or after the exercise, in particular for the purpose of comparing these results with theoretical data, averages, results obtained on previous exercises , or the results of another user. It is also possible that people registered on this website create new curves, new programs or exercise protocols and make them available to other people registered on the website in question.
- the figure 32 illustrates an example of an exercise protocol with a succession of phases (or steps).
- two setpoint curves respectively a first C C 10 and a second C C 20 setpoint curves, are recorded in the storage means 81.
- this condition 2 relating to a setpoint parameter as described above.
- this condition 2 may consist of comparing the speed V of movement of the arm 3 with a minimum threshold value, for example the speed V to the point E1 of the first setpoint curve C C 10 illustrated; the first setpoint curve C C 10 being defined by the coordinates (in force F and in displacement D) of three points E1, E2 and E3.
- a minimum threshold value for example the speed V to the point E1 of the first setpoint curve C C 10 illustrated
- the first setpoint curve C C 10 being defined by the coordinates (in force F and in displacement D) of three points E1, E2 and E3.
- the user performs for example the exercise on a number of movement cycle (round trip) of the arm 3 before the end of the training.
- condition 2 is never fulfilled, the user accesses the end of the training when he has made a number predetermined predetermined cycle of movement of the arm 3.
- This condition corresponds to condition 1 of the figure 32 which is filled when the number of cycles reaches the predetermined value.
- this condition 3 may consist in comparing the actual effort at point E2 with a maximum threshold value.
- the user is informed if this effort is less than the maximum threshold value; in other words, as long as the effort is greater than the maximum threshold value the user continues his exercise normally.
- a first series of tests take place in real time during a cycle.
- the central unit first checks that the motor means respects the stored setpoint curve, and also monitors the physiological parameters that can in critical cases modify the planned cycle; a cycle corresponding to a round-trip sequence of the arm 3, an exercise corresponding to a sequence of the same cycles, and a training corresponding to a set of identical or different exercises.
- the same tests are performed.
- the figure 33 illustrates a general protocol model in the form of an algorithm.
- the method comprises a step of locating the arm 3 in space, and a step of controlling the position of the arm 3 in the space in order to force the user to follow, with the arm 3, a trajectory delimited in the space during the exercise.
- the step of locating the arm 3 in space is achieved by means of angle sensors fitted to each of the secondary motor means 70 and by the displacement sensor 85 measuring the displacement D of the arm 3; the information from these sensors providing information on the position of the free end of the arm 3 in connection with the user, and thus on the path followed by this free end of the arm 3 and therefore followed by the user.
- FIGS 34, 36 and 37 illustrate a user U performing an exercise on a device 1 consisting of working an upper limb MS (or arm) by moving and / or braking the arm 3 of the apparatus 1.
- This apparatus 1 comprises a means of cooperation 7 as described above in the second part of the description, in other words a cooperation means 7 provided with secondary motor means 70 for constraining the upper limb MS of the user U to follow a delimited trajectory T in space.
- the central unit 80 controls the motor means 5 and the secondary motor means 70 to possibly enslave the trajectory of the arm 3 around a predefined trajectory T, advantageously stored in the storage means 81.
- the central unit 80 calculates in real time the trajectory of the arm 3 (thanks to the sensors mentioned above) and slaves the various motor means 5, 70 to constrain the user U to follow the path T.
- the device 1 continues to impose a servocontrol around the setpoint curve Cc visible in figure 35 and corresponding to a curve in force F or in speed V as a function of the displacement D of the arm 3.
- the force, the counter-force or the speed will for example be imposed by the motor means 5 according to the setpoint curve C C preprogrammed.
- a working corridor CT is established around the predefined path T.
- the apparatus 1 will apply only the servocontrol around the setpoint curve C C (as for example a servocontrol in force or speed during the movement of the arm).
- the user is entitled to a margin of error in his movement around this trajectory T and the movements will therefore take place in this CT corridor centered on the trajectory T between points A and B.
- the apparatus 1 will slave the motor means 5, 70 necessary to correct the wrong trajectory taken by the user U by imposing a CE force against more or less important to constrain the user to return within the limits of the CT working corridor.
- the apparatus 1 may send a message to the user informing him that he is not following the trajectory correctly, notably by using the guiding means 90 or the display means 88.
- a crown CR can be established around the working corridor CT, the radial counter-force EC will force the user U to remain in the corridor CT planned by the exercise as the user U does not return inside the crown CR. If the user U continues to move away from the trajectory T, to leave the working corridor CT and to go inside the crown CR, the counter-force CE increases until reaching a maximum value CEmax predetermined to limits of the crown CR.
- the increase of the CE counterforce in the crown CR may be progressive or discontinuous up to the limits of the CR crown.
- the Figures 38 to 47 illustrate the many uses of the device 1.
- This device 1 allows in particular a rehabilitation for the lower and upper limbs sitting, standing or lying, according to the setting of the position of the device 1 on the frame; such an adjustment being obtained by adjusting the position of the support (not shown) sliding on the frame.
- the user can work, as far as possible, simultaneously the two lower or upper limbs; it suffices for the connecting means to be suitable for such work.
- the device 1 will be used in the rehabilitation or fitness of the majority of the muscles of the user. To do this, the user and the apparatus 1 will be positioned in a multitude of combinations. The user may be in a lying, sitting or standing posture, and the apparatus 1 may be positioned horizontally or vertically or intermediately inclined.
- the user works an upper limb, while standing, with a device 1 resting against the ground or articulated on the ground.
- the user works a lower limb, lying down, with a device 1 against a wall or articulated on a wall.
- the user works a lower limb, while standing, with a device 1 against a wall or articulated on a wall.
- the user works a lower limb, sitting, with a device 1 against a wall or articulated on a wall.
- the user U works an upper limb, while standing, with a device 1 set at a suitable height after adjusting the position of the support (not visible) on a rail R integral with the frame B (here a wall), and with a third party TP, such as a therapist or a sports coach, who supervises the exercise.
- a third party TP such as a therapist or a sports coach
- This device 1 allows for example to perform eccentric and concentric movements, depending on the muscle chain considered.
- this device 1 has the advantage of being portable or portable, bulky or compact, so that a user can move easily, and especially a therapist or a sports trainer can go with the device in a patient or client.
Landscapes
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Physical Education & Sports Medicine (AREA)
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Human Computer Interaction (AREA)
- Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Life Sciences & Earth Sciences (AREA)
- Biophysics (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Databases & Information Systems (AREA)
- Software Systems (AREA)
- Rehabilitation Tools (AREA)
Description
La présente invention se rapporte à un appareil d'exercice musculaire et/ou articulaire, à un dispositif d'exercice musculaire et/ou articulaire comprenant un tel appareil d'exercice et à un procédé d'utilisation de cet appareil d'exercice ; un tel appareil étant adapté à la rééducation et/ou l'entraînement physique d'une partie du corps d'un utilisateur, tel qu'un membre supérieur (bras) et/ou inférieur (jambe), ou une partie de membre supérieure (avant-bras, poignet, coude) et/ou inférieure (cheville, cuisse, genou), ou une autre une partie du corps comme par exemple la hanche ou le bassin.The present invention relates to a muscular and / or joint exercise apparatus, to a muscular and / or joint exercise device comprising such an exercise apparatus and to a method of using this exercise apparatus; such apparatus being adapted for rehabilitation and / or physical training of a user's body part, such as an upper limb (arm) and / or lower limb (limb), or an upper limb part ( forearm, wrist, elbow) and / or lower (ankle, thigh, knee), or another part of the body such as the hip or pelvis.
Elle se rapporte plus particulièrement à un appareil d'exercice musculaire et articulaire pouvant avantageusement être utilisé dans un hôpital, un cabinet de kinésithérapie, un club sportif, un club de maintien de la forme physique ou à domicile chez l'utilisateur, étant bien entendu par utilisateur toute personne susceptible d'utiliser un tel appareil d'exercice.It relates more particularly to a muscular and articular exercise machine that can advantageously be used in a hospital, a physiotherapy practice, a sports club, a fitness club or at home at the user, of course. per user any person likely to use such an exercise machine.
De manière connue, la rééducation d'un membre, bras ou jambe, suite à une maladie ou un accident comprend principalement les étapes suivantes :
- une première mobilisation articulaire pendant laquelle le membre est déplacé sans faire intervenir le muscle du patient, suite à une période de repos articulaire avec immobilisation du membre concerné ;
- une mobilisation active pendant laquelle l'effort du muscle du patient est assisté ; et enfin
- le renforcement musculaire proprement dit pendant lequel le patient déplace le membre contre une force résistante, avec éventuellement une phase de musculat analytique, c'est-à-dire ne faisant intervenir qu'un ou plusieurs muscles spécifiques, suivie d'une phase de musculation globale.
- a first articular mobilization during which the limb is moved without involving the muscle of the patient, following a period of articular rest with immobilization of the limb concerned;
- active mobilization during which the effort of the patient's muscle is assisted; and finally
- the actual muscle reinforcement during which the patient moves the limb against a resistant force, possibly with an analytic muscle phase, that is to say involving only one or more specific muscles, followed by a phase of bodybuilding overall.
Dans les clubs sportifs ou de maintien de la forme physique, les personnes pratiquent généralement des exercices musculaires rarement exécutés dans leur vie quotidienne, à l'exception des sportifs qui pratiquent, en sus de l'entretien de leur condition physique, le développement de muscles particuliers nécessaires à leur activité sportive tels que ceux des jambes et des bras pour un skieur, un nageur ou un joueur de tennis.In sports clubs or fitness clubs, people usually practice muscular exercises that are rarely performed in their daily lives, with the exception of athletes who, in addition to maintaining their physical condition, develop muscles. particulars necessary for their sports activity such as those of the legs and arms for a skier, a swimmer or a tennis player.
On distingue usuellement les exercices musculaires en fonction des contraintes et mouvements imposés au muscle, à savoir :
- les exercices de musculation isométrique, avec une contraction du muscle sans mouvement du membre ;
- les exercices de musculation à charge constante pendant lesquels une charge pesante est déplacée verticalement par un jeu de câbles et de poulies et ce plus ou moins rapidement selon l'effort de la personne ;
- les exercices de musculation isocinétique (ou isokinétique) pendant lesquels la vitesse du mouvement est imposée par une machine à une valeur constante ; et enfin
- les exercices de musculation isotonique nécessitant des appareils d'exercices imposant une force de contre-réaction et une vitesse de mouvement de telle sorte que le tonus du muscle impliqué reste constant.
- isometric weight training exercises, with contraction of the muscle without movement of the limb;
- constant load weight training exercises during which a heavy load is moved vertically by a set of cables and pulleys and more or less quickly depending on the effort of the person;
- isokinetic (or isokinetic) bodybuilding exercises during which the speed of movement is imposed by a machine at a constant value; and finally
- isotonic bodybuilding exercises requiring exercise equipment imposing a counter-reaction force and a speed of movement so that the muscle tone involved remains constant.
De plus, sachant que tout membre dispose de deux muscles ou chaînes de muscles travaillant en opposition, l'un(e) agoniste et l'autre antagoniste (comme par exemple le biceps et le triceps pour le bras, ou le quadriceps et les muscles ischio-jambiers pour la jambe), on peut définir quatre efforts musculaires distincts d'un membre par rapport à un levier, soit par exemple pour l'avant bras :
- contraction du biceps pour tirer dans un mouvement concentrique le levier ;
- effort du biceps pour retenir le levier se déplaçant dans un mouvement excentrique ;
- poussée par le triceps du levier dans un mouvement excentrique ; et enfin
- retenue par le triceps du levier se déplaçant concentriquement.
- contraction of the biceps to pull in a concentric movement the lever;
- biceps effort to hold the lever moving in an eccentric motion;
- pushed by the triceps of the lever in an eccentric motion; and finally
- held by the triceps of the lever moving concentrically.
En outre, il est bien connu que les muscles, du fait de l'asymétrie de l'orientation de leurs fibres et de leurs insertions, exercent sur les os et leurs articulations des forces et/ou des couples simultanés bidirectionnels, voire pluri-directionnels. Ainsi, la quasi-totalité des muscles exerce sur les segments articulaires des contraintes multi-directionnelles. Or, il est établi que lors d'un exercice musculaire développant des efforts bidirectionnels, voire pluridirectionnels, la suractivation de l'activité musculaire peut atteindre de 15 à 25 % d'unités motrices musculaires recrutées en plus par rapport à un exercice musculaire développant des efforts unidirectionnels ; l'unité motrice se définissant comme un ensemble comprenant une fibre musculaire et une fibre nerveuse assurant son contrôle. Dans le cadre de l'invention, les termes bidirectionnel, multidirectionnel ou pluridirectionnel expriment la possibilité pour un sujet, un membre, une ou des articulations, de pouvoir effectuer simultanément ou successivement un effort selon plusieurs degrés de liberté, donc selon plusieurs directions, comme il le sera montré ci-après de façon détaillée.In addition, it is well known that the muscles, because of the asymmetry of the orientation of their fibers and their insertions, exert on the bones and their joints forces and / or simultaneous bidirectional or even multi-directional couples . Thus, almost all the muscles exert multi-directional stresses on the articular segments. However, it is established that during a muscular exercise developing bi-directional or even multidirectional efforts, the overactivation of the muscular activity can reach 15 to 25% of muscular motor units recruited in addition to a muscle exercise developing unidirectional efforts; the motor unit being defined as an assembly comprising a muscle fiber and a nerve fiber ensuring its control. In the context of the invention, bidirectional, multidirectional or pluridirectional terms express the possibility for a subject, a limb, or one or more joints, to be able to simultaneously or successively perform an effort according to several degrees of freedom, therefore according to several directions, as will be shown hereinafter in detail.
De l'ensemble des définitions indiquées ci-dessus, on peut comprendre la grande variété d'exercices musculaire ainsi que la multitude des mouvements possibles, d'où l'intérêt porté aux appareils d'exercice musculaire polyvalent permettant notamment d'assurer des efforts ou mouvements pluridirectionnels, de faire travailler des muscles ou chaînes de muscle spécifiques sans faire travailler par exemple les muscle ou chaînes de muscle antagonistes, de permettre des mouvements concentriques et excentriques.From the set of definitions indicated above, one can understand the wide variety of muscular exercises as well as the multitude of possible movements, hence the interest in multi-purpose muscle exercise equipment, in particular to ensure efforts or multi-directional movements, to work specific muscles or muscle chains without for example working the muscle or antagonistic muscle chains, to allow concentric and eccentric movements.
Il est également intéressant d'avoir un appareil d'exercice articulaire permettant une mobilisation articulaire pendant laquelle le membre est déplacé sans faire intervenir le muscle du patient, ainsi qu'une mobilisation active pendant laquelle l'effort du muscle du patient est assisté.It is also interesting to have a joint exercise apparatus allowing articular mobilization during which the limb is moved without involving the patient's muscle, as well as active mobilization during which the effort of the patient's muscle is assisted.
Les produits existants dans le domaine de la rééducation et de la remise en forme utilisent essentiellement pour créer un effort de travail sur le membre des systèmes utilisant des poids (on parle alors d'appareil de pouliethérapie), ou bien des résistances avec des systèmes pneumatique (on parle alors d'appareil mécanothérapie). Ces appareils sont en général lourds et encombrants, peu paramétrables, offrant un choix de mouvement réduit pour le membre, difficiles à monter soi-même et difficilement transportables.Existing products in the field of rehabilitation and fitness use mainly to create a work effort on the member of the systems using weights (it is called pulley therapy device), or resistors with pneumatic systems (This is called a mechanotherapy device). These devices are usually heavy and bulky, not configurable, offering a reduced choice of movement for the member, difficult to assemble oneself and difficult to transport.
De tels appareils présentent l'inconvénient de solliciter brutalement les membres objets de l'exercice. La
- du décollement de la charge, avant la première phase P1 ;
- de l'inversion du sens de déplacement de ladite charge, entre les deux phases P1 et P2, où l'effort de traction bascule en un effort de résistance ;
- de la pose de la charge, après la deuxième phase P2.
- detachment of the charge, before the first phase P1;
- reversing the direction of movement of said load, between the two phases P1 and P2, where the tensile force switches into a resistance force;
- of the laying of the charge, after the second phase P2.
Ces discontinuités sont inévitables, non réglables et d'autant plus importante que la charge à soulever ou retenir est lourde. Or, ces variations brusques d'effort engendrent des sollicitations importantes au niveau des :
- des tendons, pouvant conduire en cas de fatigue à des problèmes de tendinite ; et
- des articulations, limitant l'usage de tels appareils pour les personnes ayant des problèmes articulaires et souhaitant tout de même entraîner les muscles du membre en question.
- tendons, which can lead to problems of tendonitis in case of fatigue; and
- joints, limiting the use of such devices for people with joint problems and still want to train the muscles of the member in question.
En outre, ces variations brusques d'effort sollicitent fortement le système cardiaque, car le coeur doit répondre à cet effort musculaire brusque. Ainsi les personnes présentant des faiblesses cardiaques, comme par exemple les personnes munies de pacemaker, ne pourront pas utiliser ces appareils, ou alors d'une manière très limitée.In addition, these sudden variations of effort strongly solicit the cardiac system, because the heart must respond to this sudden muscular effort. Thus people with heart failure, such as people with pacemaker, can not use these devices, or in a very limited way.
Durant la phase de la première phase P1 de déplacement, l'effort F de traction de la machine reste pendant tout le déplacement quasiment constant. Durant cette première phase P1, il est observé que la respiration s'ajuste sensiblement au rythme des mouvements, qui ne correspond pas nécessaire au rythme normal de respiration. Donc cette respiration ne permettra pas un apport en oxygène correct et le muscle travaillera en anaérobie, autrement dit avec un déficit en oxygénation. Un tel déficit en oxygénation des muscles crée des toxines qui devront être évacuées, pour éviter des courbatures, par des étirements en fin d'exercice et une hydratation plus importante.During the phase of the first phase P1 of displacement, the tensile force F of the machine remains during all the movement almost constant. During this first phase P1, it is observed that the breathing is adjusted substantially to the rhythm of the movements, which do not correspond to the normal rhythm of breathing. So this breathing will not allow a correct oxygen supply and the muscle will work in anaerobic way, in other words with a deficit in oxygenation. Such a deficiency of oxygenation of the muscles creates toxins that will have to be evacuated, to avoid aches, by stretching at the end of exercise and a greater hydration.
Durant cette première phase P1, il est également observé une sollicitation de toutes les fibres musculaires. Comme l'effort F est constant durant toute la première phase P1 de déplacement de la charge, toutes les fibres travaillent. Une telle sollicitation de toutes les fibres peut être préjudiciable pour les personnes ayant des contusions musculaires sur certaines fibres, de sorte que l'entraînement de ce muscle ne peut pas être fait avec un tel appareil d'exercice. Pour ces personnes, seul un spécialiste, comme par exemple un kinésithérapeute, peut faire travailler de façon spécifique certains muscles ou chaînes musculaires en faisant notamment varier l'effort au cours du mouvement. De même, ces appareils ne sont pas adaptés pour des personnes présentant un tendon fragilisé et/ou douloureux et qui ne peuvent faire travailler leur membre que dans une plage de mouvement limitée du membre en question.During this first phase P1, it is also observed a solicitation of all muscle fibers. As the effort F is constant throughout the first phase P1 of displacement of the load, all the fibers work. Such solicitation of all fibers can be detrimental to people with muscle contusions on certain fibers, so that training of this muscle can not be done with such exercise machine. For these people, only a specialist, such as a physiotherapist, can specifically work some muscles or muscle chains including varying the effort during movement. Similarly, these devices are not suitable for people with a tendon weakened and / or painful and can only work their member in a limited range of movement of the member in question.
Après avoir tracté la charge pendant la première phase P1, il faut ensuite ramener cette dernière au point de départ durant la deuxième phase P2. Le retour de la charge est donc obligatoire et l'effort de résistance à effectuer est équivalent à l'effort de traction. Toutes les remarques ci-dessus relatives à la première phase P1 sont bien entendues valables pour la deuxième phase P2.After towing the load during the first phase P1, it is then necessary to bring the latter back to the starting point during the second phase P2. The return of the load is therefore mandatory and the resistance force to be performed is equivalent to the traction force. All the above remarks relating to the first phase P1 are of course valid for the second phase P2.
Ces efforts constants et répétitifs de traction et de résistance vont certes exercer des efforts sur le membre en exercice, mais viendront aussi solliciter les muscles de maintien de la posture du patient. Par exemple, dans le cas où le patient est assis et effectue des mouvements d'un seul bras, son buste va compenser le déséquilibre engendré par les efforts exercés sur le bras. Au fur et à mesure de l'exercice, le patient ne va pas compenser de manière identique à chaque fois et sa posture risque de dévier, pouvant engendrer des problèmes musculaires à long terme.These constant and repetitive efforts of traction and resistance will certainly exert efforts on the member in exercise, but will also solicit the muscles maintaining the posture of the patient. For example, in the case where the patient is seated and performs movements of a single arm, his bust will compensate for the imbalance caused by the forces exerted on the arm. As the exercise progresses, the patient will not compensate the same way each time and his posture may deviate, which can cause long-term muscle problems.
De plus, les appareils de musculations connus ne sont généralement pas polyvalent ou multifonctionnel dans le sens où ces appareils présentent des articulations dédiées spécifiquement à l'exercice de certains muscles ou de certains membres ou parties de membre, tels que le bras, l'épaule, le coude, le poignet, la cuisse, la cheville etc.In addition, known musculoskeletal devices are generally not versatile or multifunctional in the sense that these devices have articulations specifically dedicated to the exercise of certain muscles or certain limbs or parts of limbs, such as the arm, the shoulder , elbow, wrist, thigh, ankle etc.
L'état de la technique peut également être illustré par l'enseignement des documents
Il est également connu des appareils dits multi-usages qui peuvent réaliser plusieurs fonctions successivement, par addition de deux dispositifs distincts. Cependant, ces appareils ne peuvent pas effectuer simultanément des mouvements ou des efforts bidirectionnels, pluridirectionnels ou multidirectionnels, dans le sens où ils ne permettent pas de réaliser simultanément des mouvements ou des efforts bidirectionnels ou pluridirectionnels.It is also known so-called multi-purpose devices that can perform several functions successively, by adding two separate devices. However, these devices can not simultaneously perform bi-directional, multidirectional or multidirectional movements or efforts, in the sense that they do not make it possible to simultaneously perform bidirectional or multidirectional movements or efforts.
Dans le domaine de la rééducation des personnes souffrant de troubles du mouvement, il est connu du document
Le document
- un corps creux présentant un fond;
- un organe mobile déplaçable en translation selon un axe principal et conçu pour être déplacé par la partie du corps de l'utilisateur et également pour déplacer ladite partie du corps;
- un moyen moteur relié à l'organe mobile et adapté pour entraîner en déplacement l'organe mobile dans les deux sens de translation, et également pour freiner le déplacement de l'organe mobile dans les deux sens de translation ; et
- un moyen de coopération entre le corps et un bâti;
- au moins un moyen d'articulation du corps sur le bâti,
- un moyen amovible de montage et de démontage du corps.
- a hollow body having a bottom;
- a movable member movable in translation along a major axis and adapted to be moved by the body portion of the user and also to move said body portion;
- a motor means connected to the movable member and adapted to drive the movable member in displacement in both translation directions, and also for braking the displacement of the movable member in both directions of translation; and
- a means of cooperation between the body and a building;
- at least one means of articulation of the body on the frame,
- a removable means for mounting and dismounting the body.
Le document
En outre, l'appareil décrit dans le document
Dans le domaine de la rééducation des membres inférieurs, le document
La présente invention a notamment pour but de résoudre en tout ou partie les inconvénients susmentionnés, et propose à cet effet un appareil d'exercice musculaire et/ou articulaire adapté à la rééducation et/ou l'entraînement physique d'une partie du corps, notamment un membre supérieur et/ou inférieur, d'un utilisateur, ledit appareil comprenant :
- un corps creux, ouvert à l'une de ses extrémités et présentant un fond sur l'extrémité opposée à l'extrémité ouverte ;
- un organe mobile déplaçable en translation à l'intérieur du corps selon un axe principal et conçu pour être déplacé par la partie du corps de l'utilisateur et également pour déplacer ladite partie du corps ;
- un moyen moteur, relié à l'organe mobile et adapté pour entraîner en déplacement l'organe mobile dans les deux sens de translation, et également pour freiner le déplacement de l'organe mobile dans les deux sens de translation ;
- un moyen de coopération entre le corps et un bâti, ce moyen de coopération comprenant :
- au moins un moyen d'articulation du corps sur le bâti, ledit moyen d'articulation offrant au moins au moins un degré de liberté en rotation pour le corps autour d'un axe de rotation ; et
- un moyen amovible de montage et de démontage du corps, ledit moyen amovible étant conçu pour le montage amovible dudit corps sur un support monté à coulissement dans le bâti.
- a hollow body, open at one of its ends and having a bottom on the end opposite the open end;
- a movable member translatable within the body along a major axis and adapted to be moved by the user's body portion and also to move said body portion;
- a motor means, connected to the movable member and adapted to drive the movable member in displacement in both translation directions, and also for braking the displacement of the movable member in the two translation directions;
- a means of cooperation between the body and a frame, this means of cooperation comprising:
- at least one means for articulating the body on the frame, said articulation means providing at least at least one degree of freedom in rotation for the body about an axis of rotation; and
- removable means for mounting and dismounting the body, said removable means being adapted for removably mounting said body on a support slidably mounted in the frame.
Cet appareil présente l'avantage d'être de faible poids et de faible encombrement, transportable ou portatif, en comprenant principalement le corps creux, le moyen moteur et l'organe mobile. L'encombrement d'un tel appareil réside essentiellement dans l'encombrement du corps, lorsque le bras est rétracté au moins partiellement à l'intérieur du corps ; le moyen moteur étant avantageusement fixé sur le fond du corps, à l'intérieur ou à l'extérieur du corps. Ainsi, cet appareil est aisément transportable à la main ou dans une voiture, permettant par exemple à un thérapeute ou à un entraîneur sportif de se déplacer avec un ou plusieurs appareils conformes à l'invention et de se rendre au domicile de ses patients ou clients pour leur faire réaliser des exercices sur ces appareils.This device has the advantage of being lightweight and compact, transportable or portable, mainly comprising the hollow body, the motor means and the movable member. The bulk of such a device lies essentially in the bulk of the body, when the arm is retracted at least partially inside the body; the motor medium being advantageously fixed on the bottom of the body, inside or outside the body. Thus, this device is easily transportable by hand or in a car, allowing for example a therapist or a sports trainer to move with one or more devices according to the invention and to go to the home of his patients or clients to have them perform exercises on these devices.
Le positionnement du moyen moteur et du moyen de coopération sur le fond du corps permet ainsi de stabiliser le barycentre sur l'arrière de l'appareil, et donc de déporter le poids de l'appareil au niveau du bâti avec l'avantage de minimiser les changements de poids en fonctionnement, lors des exercices. De façon avantageuse, le moyen moteur est disposé dans un carter solidaire du crops, et le moyen de coopération est fixé sur le carter en question, de sorte que le moyen de coopération est disposé sensiblement entre le moyen amovible et le moyen moteur.The positioning of the motor means and the means of cooperation on the bottom of the body thus makes it possible to stabilize the center of gravity on the rear of the apparatus, and thus to shift the weight of the apparatus to the frame with the advantage of minimizing weight changes in operation, during exercises. Advantageously, the motor means is disposed in a housing integral with the crop, and the cooperation means is fixed on the housing in question, so that the cooperation means is disposed substantially between the removable means and the motor means.
En outre, cet appareil convient pour effectuer simultanément des mouvements ou des efforts bidirectionnels, pluridirectionnels ou multidirectionnels, en permettant d'effectuer un effort selon plusieurs degrés de liberté. En effet, l'organe mobile offre un premier degré de liberté vis-à-vis du corps, et le moyen d'articulation offre au moins un degré de liberté supplémentaire. Ainsi, l'appareil pourra servir dans la rééducation (ou la remise en forme) de la majorité des muscles du patient.In addition, this device is suitable for simultaneously making bidirectional movements or efforts, multidirectional or multidirectional, allowing to perform an effort according to several degrees of freedom. Indeed, the movable member provides a first degree of freedom vis-à-vis the body, and the hinge means provides at least one additional degree of freedom. Thus, the device can be used in the rehabilitation (or fitness) of the majority of the patient's muscles.
En outre, l'utilisateur pourra choisir le plan de travail en réglant la position du corps sur le bâti, grâce au moyen amovible permettant le montage amovible du corps sur un support qui est réglable en translation sur un bâti.In addition, the user can choose the work plan by adjusting the position of the body on the frame, thanks to the removable means for removable mounting of the body on a support which is adjustable in translation on a frame.
En combinant la mobilité de l'organe mobile en translation, le ou les degrés de liberté en rotation réalisés par le moyen d'articulation, et la possibilité de réglage de la position (eg. hauteur ou position verticale) de l'appareil, une multitude de combinaisons et de mouvement pour le patient sont envisageables, avec le patient qui pourra par exemple se trouver ou bien en posture couché, assis ou debout, et avec l'appareil (autrement dit le corps de l'appareil) qui pourra être positionné de façon réglable horizontalement, verticalement ou bien inclinée. Cet appareil permet ainsi de faire travailler l'utilisateur dans un quasi demi-espace, d'environ - 90° à + 90° en horizontale et d'environ - 90° à + 90° en verticale.By combining the mobility of the movable member in translation, the one or more degrees of freedom in rotation produced by the articulation means, and the possibility of adjusting the position (eg height or vertical position) of the apparatus, a a multitude of combinations and movements for the patient can be envisaged, with the patient being able, for example, to be in a lying, sitting or standing posture, and with the apparatus (in other words the body of the apparatus) which can be positioned adjustable horizontally, vertically or inclined. This device thus makes it possible to make the user work in a quasi-half space, of approximately - 90 ° to + 90 ° in horizontal and approximately - 90 ° to + 90 ° in vertical.
Cet appareil permet avantageusement d'effectuer des exercices en aérobie. Avec cet appareil, il en effet possible de travailler avec un effort maximal pendant une partie de l'exercice et ainsi d'éviter de calquer son expiration sur l'effort et de régler sa respiration sur l'exercice et donc son rythme cardiaque sur la respiration. Respiration et rythme cardiaque sont donc découplés de l'effort. Les échanges gazeux (apport de l'oxygène au muscle) sont donc optimisés, permettant ainsi de réaliser des exercices sans un besoin conséquent en échauffement cardiovasculaire préalable. Cet appareil permet ainsi la pratique de l'entraînement physique et/ou de la rééducation à des populations incapables de réaliser un échauffement préalable. En outre, les toxines générées lors des efforts sont également drainées hors du muscle plus efficacement, évitant ainsi un besoin conséquent en étirement musculaire après les exercices, tout en évitant les traumatismes du lendemain tels que les courbatures. Cet appareil permet donc à des populations incapables de réaliser un échauffement cardiovasculaire avant l'exercice et/ou des étirements après l'exercice de pratiquer ce type d'entraînement physique et/ou de rééducation.This apparatus advantageously makes it possible to perform aerobic exercises. With this device, it is indeed possible to work with an effort during a part of the exercise and so avoid to copy its exhalation on the effort and to regulate its breathing on the exercise and thus its heart rate on the breathing. Respiration and heart rate are therefore decoupled from the effort. Gaseous exchanges (oxygen supply to the muscle) are therefore optimized, thus allowing exercises to be performed without a consequent need for prior cardiovascular heating. This device allows the practice of physical training and / or rehabilitation to populations unable to perform a warm-up beforehand. In addition, the toxins generated during the efforts are also drained out of the muscle more effectively, thus avoiding a consequent need for muscle stretching after the exercises, while avoiding the traumas of the following day such as body aches. This device therefore allows populations unable to perform a cardiovascular warm-up before exercise and / or stretching after exercise to practice this type of physical training and / or rehabilitation.
Parmi encore les avantages, cet appareil permet d'effectuer un travail sur une chaîne de muscles unique sans que la chaîne musculaire antagoniste ne soit sollicitée en charge dans l'exercice. En effet, l'appareil peut fournir une énergie, ou résister à une énergie, dans un sens de déplacement de l'organe mobile et assurer un retour en position initiale sans que l'utilisateur n'ait à développer d'effort. Un tel travail permet d'exercer un muscle ou une chaîne musculaire précisément sans solliciter en charge les muscles de la chaîne antagoniste, ouvrant ainsi notamment la pratique de l'entraînement physique et/ou de rééducation à des personnes qui ont des traumatismes musculaires ou des problèmes d'articulation, de tendons ou osseux.Amongst the advantages, this apparatus makes it possible to work on a single chain of muscles without the antagonistic muscle chain being solicited under load in the exercise. Indeed, the device can provide energy, or resist energy, in a moving direction of the movable member and ensure a return to the initial position without the user having to develop effort. Such a work makes it possible to exercise a muscle or a muscular chain precisely without loading the muscles of the antagonistic chain, thus opening the practice of physical training and / or rehabilitation to people who have muscular trauma or problems of articulation, tendon or bone.
Cet appareil peut bien entendu être programmé pour solliciter plusieurs muscles et faire également intervenir plusieurs chaînes de muscles durant un même exercice. Il est ainsi envisageable avec cet appareil de faire travailler des chaînes antagonistes, à des fins d'équilibrage, de développement musculaire ou encore de gain de temps.This device can of course be programmed to solicit several muscles and also involve several chains of muscles during the same exercise. It is thus possible with this device to work antagonistic chains, for balancing, muscle development or time saving.
L'appareil conforme à l'invention peut présenter deux modes de fonctionnement :
- un mode moteur ou actif dans lequel l'appareil génère un mouvement auquel l'utilisateur doit résister. L'énergie est fournie par le moyen moteur selon des courbes de consigne prédéfinies, comme par exemple des courbes d'effort ou de vitesse, et l'utilisateur offre un contre effort résistant, lui permettant ainsi d'exercer une partie de ces muscles.
- un mode générateur ou résistant ou passif, dans lequel l'appareil exerce à l'encontre du mouvement réalisé par le sujet, qui fournit donc l'énergie, un contre effort pré programmé.
- a motor or active mode in which the device generates a motion to which the user must resist. The energy is supplied by the motor means according to predefined setpoint curves, such as, for example, force or speed curves, and the user offers a resistant counterforce, thus enabling him to exert a part of these muscles.
- a generator or resistant or passive mode, in which the device exerts against the movement made by the subject, which therefore provides the energy, a pre-programmed against effort.
De façon avantageuse, le moyen d'articulation est conçu pour offrir deux degrés de liberté en rotation autour de respectivement deux axes de rotation, notamment perpendiculaires l'un par rapport à l'autre ; l'un des axes de rotation coïncidant éventuellement avec l'axe principal de translation.Advantageously, the hinge means is designed to provide two degrees of freedom in rotation about respectively two axes of rotation, in particular perpendicular to each other; one of the axes of rotation possibly coinciding with the main axis of translation.
Par exemple, le moyen d'articulation comprend une première liaison pivot selon l'axe principal reliée à une seconde liaison pivot selon un axe transversal perpendiculaire à l'axe principal.For example, the articulation means comprises a first pivot connection along the main axis connected to a second pivot connection along a transverse axis perpendicular to the main axis.
De façon préférentielle, le ou chaque moyen d'articulation comprend en outre au moins une butée réglable limitant la rotation du corps autour d'au moins un axe de rotation, de sorte que ladite butée permette de définir une plage d'angle réglable pour la rotation dudit corps autour de l'axe de rotation correspondant.Preferably, the or each articulation means further comprises at least one adjustable stop limiting the rotation of the body about at least one axis of rotation, so that said stop allows to define an adjustable angle range for the rotating said body about the corresponding axis of rotation.
En comportant une telle butée réglable, le moyen d'articulation permet de limiter la rotation du corps autour de l'axe de rotation concernée et ainsi de définir une plage d'angle pour la rotation autour de l'axe de rotation correspondant, de manière à limiter le mouvement de la partie du corps de l'utilisateur à l'intérieur d'un certain secteur d'angle, voire à l'intérieur d'un cône de liberté donné lorsque deux degrés de liberté en rotation sont limités.By having such an adjustable stop, the hinge means makes it possible to limit the rotation of the body about the axis of rotation concerned and thus to define an angle range for the rotation about the corresponding axis of rotation, so as to limiting the movement of the user's body part within a certain corner sector, or even within a given freedom cone when two degrees of freedom in rotation are limited.
Selon une possibilité de l'invention, le corps supporte au moins un moyen moteur secondaire apte à entraîner en rotation le corps autour d'un axe de rotation, ledit moyen moteur secondaire comprenant au moins un capteur d'angle autour de son axe de rotation.According to a possibility of the invention, the body supports at least one secondary motor means capable of rotating the body about an axis of rotation, said secondary motor means comprising at least one angle sensor around its axis of rotation. .
Le ou chaque capteur d'angle peut être relié à un moyen de contrôle afin de commander le ou chaque moyen moteur secondaire de façon à contraindre la partie du corps de l'utilisateur à suivre une trajectoire délimitée, ledit capteur d'angle pouvant être associé à un capteur de déplacement de l'organe mobile pour pouvoir localiser l'organe mobile dans l'espace ; le moyen de contrôle permettant de réaliser une étape de pilotage de la trajectoire de l'organe mobile dans l'espace.The or each angle sensor may be connected to a control means for controlling the or each secondary motor means so as to constrain the body part of the user to follow a defined path, said angle sensor being able to be associated a displacement sensor of the movable member to be able to locate the movable member in the space; the control means for performing a step of controlling the path of the movable member in space.
Il est bien entendu envisageable d'avoir deux moyens moteur secondaires reliés au moyen de contrôle et aptes à entraîner en rotation le corps autour de deux axes de rotation respectifs ; ces axes étant par exemple perpendiculaires l'un par rapport à l'autre. De même, il est possible d'avoir trois moyens moteur secondaires reliés au moyen de contrôle et aptes à entraîner en rotation le corps autour de trois axes de rotation respectifs. Il est également possible d'avoir au moins un moyen moteur secondaire apte à entraîner en rotation le corps autour d'un axe de rotation, ainsi qu'au moins un autre moyen moteur secondaire apte à entraîner en translation le corps.It is of course conceivable to have two secondary motor means connected to the control means and able to rotate the body around two respective axes of rotation; these axes being for example perpendicular to each other. Similarly, it is possible to have three secondary motor means connected to the control means and adapted to rotate the body about three respective axes of rotation. It is also possible to have at least one secondary motor means capable of rotating the body about an axis of rotation, as well as at least one other secondary motor means capable of driving the body in translation.
Selon une caractéristique, l'appareil un moyen de liaison adapté pour relier ladite partie du corps de l'utilisateur audit organe mobile afin que l'utilisateur puisse imposer un effort de déplacement audit organe mobile et inversement.According to one characteristic, the apparatus has a connection means adapted to connect said part of the body of the user to said movable member so that the user can impose a displacement force on said movable member and vice versa.
Selon une autre caractéristique, le moyen de liaison correspond à l'un des moyens choisis parmi une poignée sphérique, une poignée à rotule, une poignée pivotante, une sangle, une surface formant prise ménagée sur une extrémité de l'organe mobile, et tout autre moyen de préhension équivalent permettant à la fois de tirer et/ou de pousser l'organe mobile.According to another feature, the connecting means corresponds to one of the means chosen from a spherical handle, a ball-and-socket handle, a pivoting handle, a strap, a gripping surface formed on one end of the movable member, and any other equivalent gripping means for both pulling and / or pushing the movable member.
De manière générale, le moyen de liaison est adapté à la partie du corps à exercer, de sorte qu'il est avantageux que les moyens de liaison soient interchangeables. Ainsi, le moyen de liaison est fixé de manière amovible sur l'organe mobile afin de permettre cette interchangeabilité.In general, the connecting means is adapted to the part of the body to be exerted, so that it is advantageous for the connecting means to be interchangeable. Thus, the connecting means is removably attached to the movable member to allow this interchangeability.
L'appareil permet notamment de réaliser des exercices sur notamment les membres inférieurs et supérieurs, sans par exemple une utilisation exclusive à l'un ou l'autre membre. Des exercices de travail concernant d'autres parties du corps (bassin, dos..) peuvent également être réalisés avec cet appareil, par exemple au moyen d'une sangle.The apparatus allows in particular to perform exercises on including the lower and upper limbs, without for example an exclusive use to one or the other member. Work exercises involving other parts of the body (pelvis, back, etc.) can also be performed with this apparatus, for example by means of a strap.
Selon une autre caractéristique, le moyen moteur comprend :
- un moteur prévu pour un fonctionnement quatre quadrants ;
- une alimentation réversible du moteur ; et
- des moyens de conversion réversible du mouvement de sortie du moteur en un déplacement en translation de l'organe mobile.
- an engine provided for four quadrant operation;
- a reversible power supply of the motor; and
- means for reversibly converting the output movement of the motor into a displacement in translation of the movable member.
De façon avantageuse, le corps supporte intérieurement des moyens de guidage de l'organe mobile afin de supporter les efforts radiaux perpendiculaires à l'axe principal et de guider ledit organe mobile dans son mouvement de translation.Advantageously, the body internally supports guide means of the movable member to support the radial forces perpendicular to the main axis and guide said movable member in its translational movement.
Ainsi, l'appareil permet d'effectuer des exercices de renforcement musculaire qui demandent des efforts importants.Thus, the device can perform muscle building exercises that require significant effort.
Dans une réalisation particulière, ces moyens de guidage comprennent :
- plusieurs tirants, de préférence trois tirants, s'étendant à l'intérieur du corps parallèlement à l'axe principal ; et
- au moins un coulisseau monté à coulissement sur chacun desdits tirants et monté fixe sur l'organe mobile.
- several tie rods, preferably three tie rods, extending inside the body parallel to the main axis; and
- at least one slider slidably mounted on each of said tie rods and fixedly mounted on the movable member.
Avec ces tirants, le guidage de l'organe mobile est sensiblement isostatique, assurant ainsi une reprise optimale des efforts radiaux et permettant à l'appareil de supporter des efforts radiaux conséquents.With these tie rods, the guidance of the movable member is substantially isostatic, thus ensuring optimal recovery of radial forces and allowing the device to withstand substantial radial forces.
Dans cette réalisation avec tirants, il est envisageable que le moyen moteur comporte un moteur rotatif, un arbre fileté entraîné en rotation par le moteur et une pièce formant écrou fixée sur l'organe mobile et pourvue d'un orifice fileté coopérant avec l'arbre fileté, et que la pièce formant écrou est solidaire du coulisseau.In this embodiment with tie rods, it is conceivable that the motor means comprises a rotary motor, a threaded shaft rotated by the motor and a nut forming part fixed on the movable member and provided with a threaded hole cooperating with the shaft. threaded, and that the nut piece is secured to the slide.
Le corps est par exemple d'une longueur comprise entre 700 et 1500 mm, préférentiellement entre 1000 et 1200 mm.The body is for example of a length between 700 and 1500 mm, preferably between 1000 and 1200 mm.
L'organe mobile présente par exemple une course maximale de translation comprise entre 500 et 1000 mm, préférentiellement entre 700 et 800 mm.The movable member has for example a maximum travel distance of between 500 and 1000 mm, preferably between 700 and 800 mm.
Dans une réalisation particulière, l'appareil comprend en outre un moyen d'affichage adapté pour réaliser une étape d'affichage de l'évolution du paramètre principal d'exercice et/ou d'au moins un paramètre de consigne pendant l'exercice afin d'informer l'utilisateur et/ou une tierce personne de l'évolution de ce ou ces paramètres caractéristiques de l'exercice effectué par l'utilisateur, ledit moyen d'affichage étant notamment réalisé sous la forme d'un écran ou d'un moniteur ou d'un ensemble de diodes lumineuses disposés sur l'appareil ou hors de l'appareil.In a particular embodiment, the apparatus further comprises display means adapted to perform a step of displaying the evolution of the main exercise parameter and / or of at least one setpoint parameter during the exercise so that to inform the user and / or a third person of the evolution of this or these characteristic parameters of the exercise performed by the user, said display means being in particular realized in the form of a screen or of a monitor or set of light-emitting diodes on or off the device.
Cet affichage permet ainsi de suivre en temps réel le travail exercé par l'utilisateur, soit à destination d'un tiers praticien ou entraîneur sportif soucieux de contrôler l'exercice en cours, afin éventuellement de modifier l'exercice en cours de route en fonction des courbes affichées par le moyen d'affichage.This display makes it possible to follow in real time the work performed by the user, either for a third party practitioner or sports trainer anxious to control the exercise in progress, possibly to modify the exercise en route according to curves displayed by the display means.
De façon avantageuse, l'appareil comprend en outre un moyen de transmission adapté pour réaliser une étape de transmission de données traduisant l'évolution du paramètre principal d'exercice et/ou d'au moins un paramètre de consigne pendant l'exercice à destination d'un terminal externe, notamment du type terminal téléphonique et/ou informatique, afin d'informer une tierce personne située à distance de l'utilisateur de l'évolution de ce ou ces paramètres caractéristiques de l'exercice effectué par l'utilisateur, ledit moyen de transmission étant notamment du type transmission filaire ou transmission sans fil.Advantageously, the apparatus further comprises a transmission means adapted to perform a data transmission step reflecting the evolution of the main exercise parameter and / or at least one setpoint parameter during the exercise at destination. an external terminal, in particular of the telephone and / or computer terminal type, in order to inform a third party located at a distance from the user of the evolution of this or these parameters characteristic of the exercise performed by the user, said transmission means being in particular of the type wired transmission or wireless transmission.
Ainsi, une personne située à distance (comme un praticien ou un entraîneur sportif) peut recevoir via un réseau un historique de l'exercice effectué par l'utilisateur, permettant ainsi de suivre l'évolution de l'utilisateur séance après séance et éventuellement d'adapter l'exercice à l'utilisateur, en modifiant ou en remplaçant la courbe de consigne et/ou le protocole complet d'exercice.Thus, a remote person (such as a practitioner or a sports trainer) can receive via a network a history of the exercise performed by the user, thus making it possible to follow the progress of the user session after session and possibly adapt the exercise to the user by modifying or replacing the setpoint curve and / or the complete exercise protocol.
Selon une caractéristique, l'appareil comprend en outre au moins un moyen de guidage de l'utilisateur adapté pour générer un signal de guidage, notamment du type signal visuel, tactile ou sonore, à destination de l'utilisateur et destiné à guider l'utilisateur dans son exercice notamment en terme de :
- effort ou vitesse à développer pour déplacer l'organe mobile ou freiner le déplacement de l'organe mobile ;
- temps ou nombre de cycle restant pour l'exercice ou pour la phase de l'exercice correspondant.
- effort or speed to develop to move the movable member or to slow the movement of the movable member;
- time or number of cycles remaining for the exercise or for the corresponding exercise phase.
Ce moyen de guidage permet ainsi à l'utilisateur d'être guidé dans ses exercices de façon visuelle (avec par exemple un écran positionné devant lui) et/ou de façon sonore (avec par exemple un haut-parleur qui émet des phrases préenregistrées), avec l'émission de phrases écrites ou parlées du type informatif (comme par exemple « il vous reste cinq minutes » ou « allez moins vite ») ou du type destiné à encourager l'utilisateur (comme par exemple « vous allez battre votre record »).This guide means thus allows the user to be guided in his exercises in a visual way (with for example a screen positioned in front of him) and / or in a sound manner (with for example a loudspeaker that emits prerecorded sentences) , with the issue of written or spoken sentences of the informative type (such as "you have five minutes left" or "go slower") or type intended to encourage the user (such as "you will beat your record ").
L'appareil est par exemple équipé d'interfaces homme machine intégrées (telles qu'un écran, un clavier, un synthétiseur vocal, un microphone, etc.) et de périphériques de communications (tels qu'un écran tactile, un ordinateur, etc.) qui permettent la saisie ou l'enregistrement des courbes de consigne et le transfert de données avant et après l'exercice. Cela permet également de fournir à l'utilisateur et à son entourage immédiat ou distant des données sonores, visuelles et des représentations graphiques en temps réel pendant les exercices.The device is for example equipped with integrated man-machine interfaces (such as a screen, a keyboard, a speech synthesizer, a microphone, etc.) and communication devices (such as a touch screen, a computer, etc. .) that allow entry or recording of setpoint curves and data transfer before and after exercise. It also provides the user and his immediate or distant entourage with sound, visual and graphical data in real time during the exercises.
L'invention concerne également un dispositif d'exercice musculaire et/ou articulaire adapté à la rééducation et/ou l'entraînement physique d'une partie du corps, notamment un membre supérieur et/ou inférieur, d'un utilisateur, ledit dispositif comprenant :
- un appareil d'exercice conforme à l'une quelconque des revendications précédentes ; et
- un bâti dans lequel est monté à coulissement un support ;
- an exercise apparatus according to any one of the preceding claims; and
- a frame in which is slidably mounted a support;
Un tel dispositif est particulièrement avantageux car la combinaison d'un tel bâti et d'un tel appareil permet de choisir son plan de travail parmi une infinité de solutions. En effet, ce dispositif permettre un travail dans un demi-espace complet, limité par le bâti qui supporte le support.Such a device is particularly advantageous because the combination of such a frame and such an apparatus allows to choose his work plan from an infinity of solutions. Indeed, this device allow work in a complete half-space, limited by the frame that supports the support.
L'appareil et le dispositif conformes à l'invention permettent le travail des membres supérieurs, des membres inférieurs et également du tronc (travail du rachis) avec un seul et même équipement.The apparatus and device according to the invention allow the work of the upper limbs, lower limbs and also the trunk (work spine) with a single equipment.
L'invention se rapporte aussi à un procédé d'utilisation d'un appareil d'exercice conforme à l'invention, comprenant les étapes suivantes :
- montage de façon amovible du corps de l'appareil sur un support monté à coulissement dans un bâti ;
- réglage de la position de l'appareil en réglant la position du support sur le bâti.
- removably mounting the body of the apparatus on a support slidably mounted in a frame;
- adjusting the position of the device by adjusting the position of the support on the frame.
Selon une possibilité de l'invention, ce procédé d'utilisation comprend en outre un procédé de commande de l'appareil comprenant les étapes suivantes :
- a) enregistrement ou saisie d'au moins une courbe de consigne correspondant à une variation prédéfinie d'un paramètre principal d'exercice prédéterminé en fonction d'un paramètre d'état tel que le temps ou le déplacement de l'organe mobile, ledit paramètre d'exercice étant représentatif de l'effort de déplacement imposé par l'organe mobile à ladite partie du corps ou inversement et notamment choisi parmi la force développée par l'utilisateur sur l'organe mobile pour déplacer ou freiner l'organe mobile, le couple ou la force développés par le moyen moteur pour déplacer ou freiner l'organe mobile, la vitesse de déplacement de l'organe mobile et l'accélération du déplacement de l'organe mobile ;
- b) acquisition d'une courbe réelle correspondant à la variation du paramètre principal d'exercice mesuré pendant l'exercice en fonction du paramètre d'état ;
- c) commande du moyen moteur afin d'asservir la courbe réelle autour de la courbe de consigne pendant l'exercice, ledit moyen moteur étant contrôlé pour déplacer et/ou freiner l'organe mobile dans un mouvement de translation.
- a) recording or entering at least one setpoint curve corresponding to a predefined variation of a predetermined main exercise parameter as a function of a state parameter such as the time or displacement of the movable member, said exercise parameter being representative of the displacement force imposed by the movable member to said body part or vice versa and in particular selected from the force developed by the user on the movable member to move or brake the movable member, the torque or force developed by the motor means for moving or braking the movable member, the speed of movement of the movable member and the acceleration of the displacement of the movable member;
- b) acquisition of an actual curve corresponding to the variation of the main exercise parameter measured during the exercise as a function of the state parameter;
- c) control of the motor means to enslave the actual curve around the setpoint curve during exercise, said motor means being controlled to move and / or brake the movable member in a translational movement.
Ce procédé commande ainsi en asservissement un organe mobile déplacé ou freiné en translation, permettant ainsi de réaliser des mouvements linéaires selon une courbe de consigne prédéfinie. L'asservissement vise essentiellement à ce que la courbe réelle se rapproche, avec une certaine tolérance, de la courbe de consigne ; ladite courbe de consigne correspondant à un objectif à atteindre par l'utilisateur, pendant l'exercice, en terme d'effort lors du déplacement de l'organe mobile. L'organe mobile est capable de pousser et de tirer le membre, et également de résister à un effort exercé par le corps de l'utilisateur sur l'organe mobile dans les deux sens de déplacement ; durant un cycle (déplacement avec retour au point de départ) le paramètre principal d'exercice peut varier suivant le réglage.This method thus controls in slaving a movable member moved or braked in translation, thus making it possible to perform linear movements according to a predefined setpoint curve. The enslavement aims essentially at the fact that the real curve is getting closer, with a certain tolerance, to the setpoint curve; said setpoint curve corresponding to an objective to be achieved by the user, during the exercise, in terms of effort during movement of the movable member. The movable member is able to push and pull the member, and also to withstand a force exerted by the body of the user on the movable member in both directions of movement; during a cycle (movement with return to the starting point) the main exercise parameter may vary depending on the setting.
La programmation de l'effort permet ainsi d'avoir un appareil multifonctionnel, le même procédé (ou appareil) pouvant servir pour par exemple l'ensemble des membres de l'utilisateur, inférieur et supérieur, et d'autres parties du corps (hanche, bassin, etc.). De plus, la programmation de l'effort offre de nombreux avantages physiologiques pour l'utilisateur : les courbes de consigne (comme par exemple des courbes d'effort ou de vitesse en fonction du déplacement de l'organe mobile) sont entièrement programmables ou paramétrables par l'utilisateur ou par un praticien, tel qu'un kinéstithérapeute, ou par un entraîneur sportif.The programming of the effort thus makes it possible to have a multifunctional device, the same method (or device) that can be used for, for example, all the members of the user, lower and upper, and other parts of the body (hip , basin, etc.). In addition, the programming of the effort offers many physiological advantages for the user: the set-point curves (as for example curves of effort or velocity according to the displacement of the mobile organ) are entirely programmable or parameterizable by the user or by a practitioner, such as a physiotherapist, or by a sports trainer.
Ainsi, comme mentionné ultérieurement, la programmation de l'effort va permettre par exemple de :
- travailler en aérobie ;
- éviter des variations brusques d'effort lors de l'exercice, supprimant ainsi les sollicitations brutales pour les tendons, les articulations, et le coeur ;
- travailler sur des muscles ou des chaînes musculaires souhaités, en ciblant l'effort pour une ou quelques chaîne musculaire choisies, les autres n'étant pas sollicitées restant au repos ;
- faire travailler deux chaînes bien distinctes de muscles dans le même mouvement.
- work in aerobics;
- avoid sudden variations of effort during exercise, thus eliminating sudden stresses for tendons, joints, and the heart;
- working on desired muscles or muscle chains, targeting the effort for one or a few chosen muscle chains, the others not being asked to remain at rest;
- to work two very distinct chains of muscles in the same movement.
Avec ce procédé de commande et l'appareil associé conformes à l'invention, il est posssible d'effecteur des exercices en statique et en dynamique. Parmi les paramètres principaux d'exercice (comme par exemple l'effort et la vitesse) et les paramètres d'état (comme par exemple le temps et le déplacement de l'organe mobile), chacun peut, seul ou en combinaison avec un autre paramètre, être programmé ou neutralisé au sein d'un exercice. Dans le cas particulier où le déplacement est figé à une valeur prédéfinie (autrement dit le cas où la position de l'organe mobile est figée), l'exercice correspond à un travail statique car l'utilisateur exercera un effort, ou résistera à un effort, de telle façon que le point de contact de son corps et de l'organe mobile restera immobile dans l'espace. Dans les autres cas, les exercices correspondent à des travaux en dynamique avec un déplacement de l'organe mobile vis-à-vis du corps de l'utilisateur.With this control method and the associated apparatus according to the invention, it is possible to perform exercises in static and dynamic. Among the main parameters of exercise (as for example the effort and the speed) and the state parameters (such as the time and the displacement of the movable member), each can, alone or in combination with another parameter, be programmed or neutralized within a exercise. In the particular case where the displacement is fixed to a predefined value (in other words the case where the position of the movable member is fixed), the exercise corresponds to a static work because the user will exert an effort, or will resist a effort, so that the point of contact of his body and the movable organ will remain motionless in space. In other cases, the exercises correspond to work in dynamics with a displacement of the movable member vis-à-vis the body of the user.
Dans une réalisation avantageuse, le procédé de commande comprend en outre les étapes suivantes :
- d) mesure pendant l'exercice d'au moins un paramètre de consigne choisi parmi :
- un paramètre d'exercice secondaire distinct du paramètre d'exercice principal, ledit paramètre d'exercice secondaire étant représentatif de l'effort de déplacement imposé par l'organe mobile à ladite partie du corps ou inversement et notamment choisi parmi la force développée par l'utilisateur sur l'organe mobile pour déplacer ou freiner l'organe mobile, le couple ou la force développés par le moyen moteur pour déplacer ou freiner l'organe mobile, la vitesse de déplacement de l'organe mobile, et l'accélération du déplacement de l'organe mobile ; et/ou
- un paramètre physiologique représentatif de l'état physiologique du sujet et choisi notamment parmi l'activité électromyographique, le rythme respiratoire, le rythme cardiaque, la température de l'utilisateur, le taux d'oxygène dans le sang, la tension artérielle, et la sudation ; et/ou
- un paramètre de durée représentatif de la durée de l'exercice et choisi notamment parmi la durée de l'exercice, le nombre de cycle de déplacement effectué par l'organe mobile, le temps nécessaire à l'utilisateur pour effectuer un ou plusieurs déplacements prédéterminés de l'organe mobile ; et/ou
- un paramètre d'environnement représentatif de l'environnement externe dans lequel l'utilisateur effectue l'exercice et choisi notamment parmi la température ambiante externe, le taux d'humidité externe, la pression ambiante externe ;
- e) comparaison pendant l'exercice du au moins un paramètre de consigne avec au moins une valeur seuil prédéfinie, notamment du type valeur de seuil minimale ou valeur de seuil maximale, ladite comparaison pouvant notamment être effectuée sur une période de temps prédéterminée et/ou sur une portion prédéterminée du déplacement de l'organe mobile ;
- f) modification ou remplacement de la courbe de consigne si, lors de l'étape e), au moins un paramètre de consigne est supérieur ou inférieur à la valeur seuil correspondante, avant de reprendre les étapes b) à e) avec la courbe de consigne telle que modifiée ou remplacée afin d'adapter l'exercice à l'utilisateur suivant un protocole d'exercice prédéfini en fonction de l'évolution d'au moins un paramètre de consigne.
- d) measuring during the exercise of at least one setpoint parameter chosen from:
- a secondary exercise parameter distinct from the main exercise parameter, said secondary exercise parameter being representative of the displacement force imposed by the mobile member on said part of the body or vice versa and in particular chosen from the force developed by the user on the movable member for moving or braking the movable member, the torque or the force developed by the motor means for moving or braking the movable member, the speed of movement of the movable member, and the acceleration of the moving the movable member; and or
- a physiological parameter representative of the physiological state of the subject and chosen in particular from electromyographic activity, respiratory rate, heart rate, user temperature, blood oxygen level, blood pressure, and sweating; and or
- a duration parameter representative of the duration of the exercise and chosen in particular from the duration of the exercise, the number of movement cycle performed by the mobile member, the time required for the user to perform one or more predetermined displacements the mobile organ; and or
- an environment parameter representative of the external environment in which the user performs the exercise and chosen in particular from the external ambient temperature, the external humidity rate, the external ambient pressure;
- e) comparison during the exercise of the at least one setpoint parameter with at least one predefined threshold value, in particular of the minimum threshold value or maximum threshold value type, said comparison being able to be performed in particular over a predetermined period of time and / or on a predetermined portion of the displacement of the movable member;
- f) modification or replacement of the setpoint curve if, during step e), at least one setpoint parameter is higher or lower than the corresponding threshold value, before taking steps b) to e) with the curve of set as modified or replaced to adapt the exercise to the user according to a predefined exercise protocol according to the evolution of at least one setpoint parameter.
Ainsi, l'exercice peut changer en cours de route, avec par exemple des différentes séries de cycles de travail successifs (à chaque série étant associé une courbe de consigne bien spécifique), pour par exemple :
- s'adapter à l'utilisateur (qui peut fatiguer et souhaiter diminuer l'effort ou au contraire souhaiter augmenter l'effort) ; et/ou
- faire travailler différents muscles ou chaînes musculaires lors d'un même exercice ; et/ou
- faire travailler différentes articulations lors d'un même exercice ;
- réaliser au choix des exercices de musculation isométrique, isocinétique ou isotonique.
- adapt to the user (who may tire and wish to reduce the effort or, on the contrary, wish to increase the effort); and or
- to work different muscles or muscle chains during the same exercise; and or
- to work different joints during the same exercise;
- perform either isometric, isokinetic or isotonic weight training exercises.
Dans ce cas, le procédé de commande permet de modifier l'exercice (en modifiant ou remplaçant la courbe de consigne) ou de stopper l'exercice en cas par exemple de fatigue ou de défaillance de l'utilisateur ; on parle alors d'un procédé (ou appareil) d'exercice auto-adaptatif car l'exercice s'adapte automatiquement à l'utilisateur suivant un protocole ou un paramétrage préétabli.In this case, the control method makes it possible to modify the exercise (by modifying or replacing the setpoint curve) or to stop the exercise in case, for example, of fatigue or of user failure; we then speak of a process (or device) of self-adaptive exercise because the exercise automatically adapts itself to the user according to a protocol or a preset parameterization.
Pour avoir une adaptation de l'exercice à l'utilisateur et que l'appareil puisse réaliser les étapes d) à f) du procédé de commande, cet appareil peut comprendre :
- un moyen de stockage ou de saisie adapté pour enregistrer ou saisir la au moins une courbe de consigne pendant l'étape a) du procédé ;
- au moins un premier moyen de mesure du premier paramètre principal d'exercice et au moins un deuxième moyen de mesure du paramètre d'état ;
- au moins un troisième moyen de mesure du au moins un paramètre de consigne afin de réaliser l'étape d) du procédé ; et
- un moyen de contrôle relié aux premier et second moyens de mesure, au moyen moteur et au moyen de stockage ou de saisie, ledit moyen de contrôle étant conçu pour :
- acquérir la courbe réelle à partir des mesures effectuées par les premier et deuxième moyens de mesure afin de réaliser l'étape b) du procédé ;
- commander le moyen moteur afin de réaliser l'étape d) du procédé ;
- réaliser l'étape e) de comparaison ; et
- réaliser l'étape f) de modification ou de remplacement de la courbe de consigne.
- storage or input means adapted to record or enter the at least one setpoint curve during step a) of the method;
- at least a first measurement means of the first main exercise parameter and at least a second measurement means of the state parameter;
- at least a third means for measuring the at least one setpoint parameter in order to perform step d) of the method; and
- control means connected to the first and second measuring means, the motor means and the storage or gripping means, said control means being adapted to:
- acquiring the actual curve from the measurements made by the first and second measuring means in order to perform step b) of the method;
- controlling the motor means to perform step d) of the method;
- performing the e) comparison step; and
- performing step f) modifying or replacing the setpoint curve.
Dans un premier exemple, la ou les courbes de consignes peuvent être des courbes d'effort (ou de contre effort) en fonction du déplacement de l'organe mobile ou du temps. Dans ce cas, l'asservissement du moyen moteur assure le respect du paramètre principal d'effort, ou de contre effort, et la vitesse de l'organe mobile est une résultante prise en compte pour s'assurer d'une plage de fonctionnement ou pour afficher ou enregistrer les données ; la vitesse étant ici un paramètre de consigne prédéterminé.In a first example, the setpoint curve or curves can be curves of effort (or counter-force) as a function of the displacement of the movable member or time. In this case, the servocontrol of the motor means ensures the respect of the main parameter of effort, or counter-force, and the speed of the movable member is a resultant taken into account to ensure a range of operation or to view or save the data; the speed being here a predetermined setpoint parameter.
Dans un deuxième exemple, la ou les courbes de consignes peuvent être des courbes de vitesse de l'organe mobile en fonction du déplacement de l'organe mobile ou du temps. Dans ce cas, du moyen moteur assure le respect du paramètre principal de vitesse, et l'effort est une conséquence dont la mesure assure une plage de fonctionnement et peut être affichée ou enregistrée; l'effort étant ici un paramètre de consigne prédéterminé.In a second example, the setpoint curve or curves may be velocity curves of the movable member as a function of the displacement of the movable member or time. In this case, the motor means ensures compliance with the main speed parameter, and the effort is a consequence whose measurement ensures a range of operation and can be displayed or recorded; the force here being a predetermined setpoint parameter.
Selon une caractéristique, le procédé de commande comprend une étape de réception d'au moins une instruction émise par l'utilisateur ou une tierce personne, et une étape de modification ou de changement de la courbe de consigne en fonction de ladite instruction afin de modifier l'exercice en cours ou de remplacer l'exercice en cours par un autre exercice.According to one characteristic, the control method comprises a step of receiving at least one instruction issued by the user or a third party, and a step of modifying or changing the setpoint curve according to said instruction in order to modify the current year or replace the current year with another year.
Cette étape de modification ou de remplacement de la courbe de consigne est du même type que l'étape f) décrite ci-dessus ; la seule différence étant l'origine (ou point de départ) de l'étape, à savoir la réception d'une consigne émise par un individu dans ce cas et une variation d'un paramètre de consigne dans le cas de l'étape f). Il est bien entendu envisageable que ces deux étapes s'effectuent en parallèle.This step of modifying or replacing the setpoint curve is of the same type as step f) described above; the only difference being the origin (or starting point) of the step, namely the reception of a setpoint sent by an individual in this case and a variation of a setpoint parameter in the case of step f ). It is of course conceivable that these two steps are carried out in parallel.
Ainsi, un praticien, tel qu'un kinésithérapeute, ou un entraîneur sportif peut intervenir sur l'exercice en forçant le moyen de contrôle à modifier l'exercice, le but étant par exemple d'adapter l'exercice en fonction de l'utilisateur placé sous l'observation du praticien ou de l'entraîneur sportif. De même, l'utilisateur peut modifier de lui-même l'exercice en cours de route en fonction de ses impressions physiques sur l'exercice en cours.Thus, a practitioner, such as a physiotherapist, or a sports trainer can intervene on the exercise by forcing the control means to modify the exercise, the goal being for example to adapt the exercise according to the user placed under the observation of the practitioner or the sports trainer. Likewise, the user can modify the exercise himself on the road according to his physical impressions of the current exercise.
L'appareil peut ainsi comprendre un moyen de réception d'une instruction adapté pour réaliser l'étape de réception conformément au procédé de commande.The apparatus may thus comprise means for receiving an instruction adapted to perform the reception step in accordance with the control method.
L'utilisateur ainsi que le thérapeute ou l'entraîneur sportif peuvent ainsi intervenir en temps réel pendant un exercice pour modifier un ou plusieurs paramètres, comme par exemple l'effort ou la vitesse en tant que paramètre principal d'exercice. L'utilisateur contrôle donc complètement ses exercices et peut les adapter de façon volontaire au sein même d'un mouvement unitaire pour notamment accélérer, augmenter la force, rajouter des itérations ou du temps, allonger ou raccourcir un déplacement (c'est-à-dire augmenter ou diminuer l'amplitude d'un mouvement de translation de l'organe mobile) et voir la modification prise en compte en temps réel.The user as well as the therapist or sports trainer can thus intervene in real time during an exercise to modify one or more parameters, such as, for example, the effort or the speed as the main parameter of exercise. The user therefore completely controls his exercises and can adapt them voluntarily within a unitary movement to accelerate, increase the force, add iterations or time, lengthen or shorten a movement (ie say increase or decrease the amplitude of a translational movement of the movable member) and see the modification taken into account in real time.
De façon préférentielle, un protocole d'exercice définit plusieurs phases d'exercice successives :
- une première phase au cours de laquelle :
- i) les étapes b) et c) sont réalisées avec une première courbe de consigne (Cc10), pendant un nombre déterminé de cycle de déplacement de l'organe mobile (3) ou pour une durée prédéterminée ;
- ii) les étapes d) et e) sont réalisées pendant l'étape i) avec un paramètre de consigne (PC) déterminé ;
- iii) l'étape f) est réalisée une fois que le nombre déterminé de cycle de déplacement a été effectuée par l'organe mobile (3) ou que la durée prédéterminée est écoulée, en remplaçant la première courbe de consigne (CC10) par une seconde courbe de consigne (CC20) ou en modifiant la première courbe de consigne (CC10) afin de définir une seconde courbe de consigne (CC20), et à condition que le paramètre de consigne (PC) soit inférieur ou supérieur à une valeur seuil déterminée ;
- une seconde phase suivant la première phase au cours de laquelle :
- iv) les étapes b) et c) sont réalisées avec la seconde courbe de consigne (Cc20) pendant un nombre déterminé de cycle de déplacement de l'organe mobile (3) ;
- v) les étapes d) et e) sont réalisées pendant l'étape iv) avec un ou plusieurs paramètres de consigne (PC) déterminés ;
- vi) l'étape f) est réalisée pendant les étapes iv) et v) si l'un des paramètres de consigne (PC) étudié durant l'étape v) est supérieur ou inférieur à une valeur seuil déterminé, en remplaçant la seconde courbe de consigne (CC20) par une autre courbe de consigne ou en modifiant ladite seconde courbe de consigne (CC20).
- a first phase during which:
- i) steps b) and c) are performed with a first setpoint curve (C c 10), during a determined number of movement cycle of the movable member (3) or for a predetermined duration;
- ii) steps d) and e) are performed during step i) with a determined setpoint parameter (P C );
- iii) step f) is performed once the determined number of movement cycle has been performed by the movable member (3) or the predetermined time has elapsed, replacing the first setpoint curve (C C 10) by a second setpoint curve (C C 20) or by modifying the first setpoint curve (C C 10) in order to define a second setpoint curve (C C 20), and provided that the setpoint parameter (P C ) is less than or greater than a specified threshold value;
- a second phase following the first phase during which:
- iv) steps b) and c) are performed with the second setpoint curve (Cc20) during a given number of cycles of displacement of the movable member (3);
- v) steps d) and e) are performed during step iv) with one or more setpoint parameters (P C ) determined;
- vi) step f) is carried out during steps iv) and v) if one of the setpoint parameters (P C ) studied during step v) is greater than or less than a determined threshold value, replacing the second setpoint curve (C C 20) by another setpoint curve or by modifying said second setpoint curve (C C 20).
Ainsi, ce protocole d'exercice permet d'exercer la partie du corps de l'utilisateur avec au moins deux phases distinctes préétablies ; ces phases étant caractérisées notamment par les courbes de consigne associées qui ont été enregistrées ou saisies par éventuellement un praticien, tel qu'un kinésithérapeute, ou un entraîneur sportif, en fonction de la pathologie à traiter et/ou de l'entraînement adapté à l'utilisateur.Thus, this exercise protocol allows to exercise the user's body part with at least two predetermined distinct phases; these phases being characterized in particular by the associated setpoint curves which have been recorded or entered by possibly a practitioner, such as a physiotherapist, or a sports trainer, depending on the pathology to be treated and / or training adapted to the 'user.
Un entraînement peut ainsi être constitué d'un mouvement programmé selon une courbe de consigne donné, lui-même répété selon un nombre d'itération (ou de cycle) défini. Certains paramètres de cet exercice initial peuvent évoluer en fonction d'un ou plusieurs paramètres de consigne choisis. Plusieurs exercices de types différents peuvent être combinés au sein d'un même protocole d'exercice ; le protocole d'exercice complet pouvant être représenté dans un algorithme de commande. Les conditions d'enchaînement d'un exercice à un autre exercice et le nombre de cycles d'exercice peuvent dépendre du ou des paramètres de consigne prédéterminés.A drive may thus consist of a programmed movement according to a given setpoint curve, itself repeated according to a defined number of iteration (or cycle). Some parameters of this initial exercise may change depending on one or more selected setpoint parameters. Several exercises of different types can be combined within the same exercise protocol; the complete exercise protocol that can be represented in a control algorithm. The conditions of linking from one exercise to another exercise and the number of exercise cycles may depend on the predetermined setpoint parameter (s).
Dans un mode de réalisation particulier, un protocole d'exercice définit au moins une phase d'exercice au cours de laquelle, pendant un nombre déterminé de cycle de déplacement, le moyen moteur est commandé pour, à chaque cycle :
- faire travailler l'utilisateur dans un seul sens de translation de l'organe mobile, dit sens de travail, entre une position initiale et une position finale avec un asservissement autour d'une courbe de consigne prédéfinie ; et
- déplacer automatiquement l'organe mobile dans le sens de translation opposé au sens de travail, jusqu'en position initiale, afin de ne pas faire travailler l'utilisateur dans ce sens de translation ;
- the user works in a single direction of translation of the movable member, said working direction, between an initial position and a final position with a servo around a predefined setpoint curve; and
- automatically move the movable member in the direction of translation opposite to the working direction, to the initial position, so as not to work the user in this direction of translation;
Avec un tel protocole d'exercice, l'utilisateur fait travailler sa partie du corps dans un seul sens de translation, permettant ainsi de faire travailler une chaîne de muscle bien spécifique, sans faire travailler la chaîne de muscles antagoniste. Un tel protocole peut également être destiné à faire travailler plus spécifiquement une articulation d'un membre supérieur ou inférieur.With such an exercise protocol, the user works his part of the body in a single direction of translation, thus making it possible to work a very specific muscle chain, without making the antagonist muscle chain work. Such a protocol may also be intended to make more specifically work a joint of an upper or lower limb.
Dans une réalisation particulièrement avantageuse, la courbe de consigne (telle qu'enregistrée ou saisie ou éventuellement telle que remplacée ou modifiée) correspond à la variation prédéfinie du paramètre principal d'exercice prédéterminé en fonction du déplacement de l'organe mobile, ladite variation s'effectuant uniquement à l'intérieur d'une plage de déplacement prédéterminée entre une valeur minimale et une valeur maximale prédéterminées du déplacement.In a particularly advantageous embodiment, the setpoint curve (as recorded or entered or possibly as replaced or modified) corresponds to the predefined variation of the predetermined main exercise parameter as a function of the displacement of the movable member, said variation effected only within a predetermined range of movement between a predetermined minimum value and a predetermined maximum value of the displacement.
Avec une telle courbe de consigne, un protocole d'exercice définit une phase d'exercice au cours de laquelle le moyen moteur est commandé pour déplacer l'organe mobile selon une courbe de consigne prédéfinie uniquement à l'intérieur d'une plage de déplacement choisie de l'organe mobile. Dans cette phase, l'organe mobile ne se déplace pas sur toute sa course (c'est-à-dire entre la position rétractée et la position déployée), mais se déplace sur une course réduite, classiquement entre deux positions intermédiaires associées à des valeurs minimale et maximale correspondantes.With such a setpoint curve, an exercise protocol defines an exercise phase during which the motor means is controlled to move the movable member according to a predefined setpoint curve only within a range of displacement. selected from the movable member. In this phase, the movable member does not move over its entire stroke (that is to say between the retracted position and the deployed position), but moves on a reduced stroke, typically between two intermediate positions associated with corresponding minimum and maximum values.
Ainsi, il est possible de limiter le déplacement de la partie du corps de l'utilisateur entre deux bornes choisis notamment en fonction des muscles et/ou des articulations que l'on souhaite faire travailler ou pas et également en fonction des pathologies présentées par l'utilisateur, Dans un premier exemple d'exercice, il est possible avec ce protocole d'exercice de faire effectuer une succession de petits déplacements rapides d'un membre de l'utilisateur, c'est-à-dire de déplacements sur une course de faible amplitude relativement à la course totale de l'organe mobile , afin de faire travailler la tonicité des muscles. Dans un deuxième exemple d'exercice, il est possible de faire travailler une articulation (comme celles du genou, du coude, de l'épaule, etc.) à l'intérieur d'un secteur angulaire prédéterminé ; le secteur angulaire étant défini à partir des valeurs minimale et maximale du déplacement de l'organe mobile.Thus, it is possible to limit the displacement of the body part of the user between two terminals selected in particular according to the muscles and / or joints that one wishes to work or not and also according to the pathologies presented by the patient. user, In a first example of exercise, it is possible with this exercise protocol to make a series of small rapid movements of a user member, that is to say movements on a race low amplitude relative to the total stroke of the movable member, in order to work the muscle tone. In a second example of exercise, it is possible to work a joint (such as those of the knee, elbow, shoulder, etc.) within a predetermined angular sector; the angular sector being defined from the minimum and maximum values of the displacement of the movable member.
De façon avantageuse, le procédé de commande comprend une étape de localisation de l'organe mobile dans l'espace, et une étape de pilotage de la position de l'organe mobile dans l'espace afin de contraindre l'utilisateur à suivre, avec l'organe mobile, une trajectoire délimitée dans l'espace durant l'exercice.Advantageously, the control method comprises a step of locating the movable member in space, and a step of controlling the position of the mobile member in the space in order to constrain the user to follow, with the mobile organ, a trajectory delimited in space during the exercise.
Ainsi, le procédé de commande et l'appareil associé permettent de commander le moyen moteur et le ou les moyens moteur secondaires afin d'asservir le mouvement de l'organe mobile autour d'une trajectoire prédéfinie, permettant un travail dans l'espace de la partie du corps de l'utilisateur (généralement un membre supérieur ou inférieur), avec l'avantage de faire travailler des chaînes musculaires spécifiques, au grée d'un programme ou protocole d'exercice choisi.Thus, the control method and the associated apparatus make it possible to control the motor means and the secondary motor means or means in order to control the movement of the movable member around a predefined path, allowing work in the space of the part of the user's body (usually an upper or lower limb), with the advantage of working specific muscle chains, according to a program or exercise protocol chosen.
D'autres caractéristiques et avantages de la présente invention apparaîtront à la lecture de la description détaillée ci-après, de plusieurs exemples de mise en oeuvre non limitatifs, faite en référence aux figures annexées dans lesquelles :
- la
figure 1 représente une courbe C0 illustrant la variation de l'effort F en fonction du déplacement D de la charge, pour un cycle de déplacement montée/descente de la charge, dans le cas d'un appareil de pouliethérapie connu ; - la
figure 2 représente schématiquement un appareil conforme à l'invention ; - les
figures 3a à 3c sont des vues respectivement de dos, de face et de côté d'un appareil conforme à l'invention avec un organe mobile en position rétractée, et lafigure 3d est une vue de dos de cet appareil avec l'organe mobile en position déployée ; - les
figures 4a et 4b sont des vues respectivement de face et de côté de l'intérieur d'un appareil conforme à l'invention illustrant un moyen moteur selon un premier mode de réalisation ; - la
figure 5 est une vue de côté de l'intérieur d'un appareil conforme à l'invention illustrant un moyen moteur selon un deuxième mode de réalisation ; - les
figures 6a et 6b sont des vues respectivement de face et de côté de l'intérieur d'un appareil conforme à l'invention illustrant un moyen moteur selon un troisième mode de réalisation ; - les
figures 7a et 7b sont des vues respectivement de face et de côté de l'intérieur d'un appareil conforme à l'invention illustrant un moyen moteur selon un quatrième mode de réalisation ; - la
figure 8 est une vue partielle en perspective d'un moyen moteur selon un cinquième mode de réalisation ; - la
figure 9 illustre schématiquement un appareil conforme à l'invention en prise avec un rail de guidage solidaire d'un bâti ; - la
figure 10 illustre schématiquement un appareil conforme à l'invention en liaison avec un bâti et libre en mouvement à l'intérieur d'un tronçon de cône prédéfini ; - la
figure 11 représente schématiquement les différentes liaisons d'un appareil conforme à l'invention ; - les
figures 12 et 13 sont des vues schématiques d'un appareil conforme à l'invention muni de moyens moteur secondaires ; - les
figures 14 et 15 sont des vues schématiques d'un appareil conforme à l'invention muni de moyens moteur secondaires selon respectivement un premier et un deuxième mode de réalisation ; - la
figure 16 illustre schématiquement les quatre quadrants de fonctionnement d'un moyen moteur équipant un appareil conforme à l'invention ; - les
figures 17 et 18 représentent respectivement une premièreC C1 et une deuxièmeC C2 courbes de consigne en effort pour un appareil conforme à l'invention ; - la
figure 19 représente à la fois une troisième courbe de consigneC C3 en effort avec trois phases distinctes, et les mouvements d'un membre supérieur associé à chaque phase de la courbeC C3 ; - la
figure 20 représente une quatrième courbe de consigneC C4 en effort ; - La
figure 21 représente une cinquième courbe de consigneC C5 en effort pour un cycle de déplacement aller/retour de l'organe mobile ; - les
figures 22 et 23 représentent respectivement une sixièmeC C6 etune septième C C7 courbes de consigne en vitesse pour un appareil conforme à l'invention ; - les
figures 24 à 27 représentent différents schémas fonctionnels d'un appareil conforme à l'invention comprenant un moyen moteur selon différents modes de réalisation ; - les
figures 28 à 30 représentent différents schémas fonctionnels d'un appareil conforme à l'invention ; - la
figure 31 représente un schéma de principe de l'organe de contrôle d'un appareil conforme à l'invention et des différents moyens en liaison avec cet organe de contrôle ; - la
figure 32 illustre un exemple de protocole ou de stratégie d'exercice pour un appareil conforme à l'invention ; - la
figure 33 illustre un modèle de définition d'un protocole ou d'une stratégie d'exercice pour un appareil conforme à l'invention ; - la
figure 34 illustre schématiquement un utilisateur utilisant un appareil conforme à l'invention et essayant de suivre une trajectoire délimitée dans l'espace ; - la
figure 35 illustre une courbe de consigne CC associée à l'exercice effectué par l'utilisateur illustré à lafigure 34 ; - la
figure 36 illustre schématiquement l'utilisateur de lafigure 34 essayant de rester à l'intérieur d'une zone de tolérance entourant la trajectoire délimitée ; - la
figure 37 illustre schématiquement d'une part l'utilisateur de lafigure 34 essayant de rester à l'intérieur de la zone de tolérance sous la contrainte du moyen moteur et/ou des moyens moteur secondaires de l'appareil, et d'autre part une section agrandie de la zone de tolérance ; - les
figures 38 à 45 illustrent chacune un utilisateur d'un appareil conforme à l'invention dans deux situations où l'organe mobile est en position respectivement rétractée et déployée, à chaque figure correspondant un exercice distinct sur un membre donné de l'utilisateur ; - les
figures 46 et 47 illustrent chacune un utilisateur d'un appareil conforme à l'invention avec une tierce personne telle qu'un thérapeute ou un entraîneur sportif ; - les
figures 46a et 46b sont des vues schématiques respectivement en perspective et de côté d'un dispositif d'exercice conforme à l'invention comportant un appareil conforme à l'invention monté de façon amovible sur un bâti ; - la
figure 48 est une vue schématique en perspective de l'appareil illustré sur lesfigures 46a et 46b , sans son moyen de coopération ; - la
figure 48a est une vue schématique en coupe longitudinale verticale du dispositif illustré sur lesfigures 46a et 46b ; - les
figures 49a et 49b sont des vues schématiques en coupe longitudinale, respectivement verticale et horizontale, de l'appareil illustré sur lesfigures 46a et 46b , avec son moyen de coopération ; - la
figure 50 est une vue schématique en perspective de la poignée formant moyen de liaison de l'appareil illustré sur lesfigures 46a et 46b ; - la
figure 51 est une vue schématique en perspective du moyen de coopération de l'appareil illustré sur lesfigures 46a et 46b ; - les
figures 52a et 52b sont des vues schématiques en coupe longitudinale, respectivement horizontale et verticale, du moyen de coopération illustré sur lafigure 51 .
- the
figure 1 represents a curve C0 illustrating the variation of the force F as a function of the displacement D of the load, for a cycle of movement up / down of the load, in the case of a known pulley-therapy apparatus; - the
figure 2 schematically represents an apparatus according to the invention; - the
Figures 3a to 3c are respectively back, front and side views of an apparatus according to the invention with a movable member in the retracted position, and thefigure 3d is a back view of this apparatus with the movable member in the deployed position; - the
Figures 4a and 4b are respectively front and side views of the interior of an apparatus according to the invention illustrating a motor means according to a first embodiment; - the
figure 5 is a side view of the interior of an apparatus according to the invention illustrating a motor means according to a second embodiment; - the
Figures 6a and 6b are respectively front and side views of the interior of an apparatus according to the invention illustrating a motor means according to a third embodiment; - the
Figures 7a and 7b are respectively front and side views of the interior of an apparatus according to the invention illustrating a motor means according to a fourth embodiment; - the
figure 8 is a partial perspective view of a motor means according to a fifth embodiment; - the
figure 9 schematically illustrates an apparatus according to the invention engaged with a guide rail integral with a frame; - the
figure 10 schematically illustrates an apparatus according to the invention in connection with a frame and free moving within a predefined cone section; - the
figure 11 schematically represents the different links of an apparatus according to the invention; - the
Figures 12 and 13 are schematic views of an apparatus according to the invention provided with secondary motor means; - the
Figures 14 and 15 are schematic views of an apparatus according to the invention provided with secondary motor means respectively according to a first and a second embodiment; - the
figure 16 schematically illustrates the four quadrants of operation of a motor means equipping an apparatus according to the invention; - the
Figures 17 and 18 represent respectively afirst C C 1 and asecond C C 2 stress setpoint curves for an apparatus according to the invention; - the
figure 19 represents both a thirdsetpoint curve C C 3 in effort with three distinct phases, and the movements of an upper limb associated with each phase of thecurve C C 3; - the
figure 20 represents a fourthsetpoint curve C C 4 in effort; - The
figure 21 represents a fifthsetpoint curve C C 5 in force for a cycle of movement of the moving member back and forth; - the
Figures 22 and 23 represent respectively asixth C C 6 and aseventh C C 7 speed setpoint curves for an apparatus according to the invention; - the
Figures 24 to 27 represent different functional diagrams of an apparatus according to the invention comprising a motor means according to different embodiments; - the
Figures 28 to 30 represent different functional diagrams of an apparatus according to the invention; - the
figure 31 represents a block diagram of the control device of an apparatus according to the invention and various means in connection with this control member; - the
figure 32 illustrates an exemplary protocol or exercise strategy for an apparatus according to the invention; - the
figure 33 illustrates a model for defining a protocol or an exercise strategy for an apparatus according to the invention; - the
figure 34 schematically illustrates a user using an apparatus according to the invention and trying to follow a trajectory delimited in space; - the
figure 35 illustrates a setpoint curve C C associated with the exercise performed by the user illustrated in FIG.figure 34 ; - the
figure 36 schematically illustrates the user of thefigure 34 attempting to remain within an area of tolerance surrounding the bounded path; - the
figure 37 schematically illustrates on the one hand the user of thefigure 34 attempting to remain within the tolerance zone under the constraint of the motor means and / or secondary motor means of the apparatus, and on the other hand an enlarged section of the tolerance zone; - the
Figures 38 to 45 each illustrate a user of an apparatus according to the invention in two situations where the movable member is respectively retracted and deployed position, each corresponding figure a separate exercise on a given member of the user; - the
Figures 46 and 47 each illustrate a user of an apparatus according to the invention with a third person such as a therapist or a sports trainer; - the
Figures 46a and 46b are schematic respectively perspective and side views of an exercise device according to the invention comprising an apparatus according to the invention removably mounted on a frame; - the
figure 48 is a schematic perspective view of the apparatus shown on theFigures 46a and 46b without his means of cooperation; - the
figure 48a is a schematic view in vertical longitudinal section of the device illustrated on theFigures 46a and 46b ; - the
Figures 49a and 49b are schematic views in longitudinal section, respectively vertical and horizontal, of the apparatus illustrated on theFigures 46a and 46b , with its means of cooperation; - the
figure 50 is a schematic perspective view of the handle forming a connecting means of the apparatus illustrated in FIGS.Figures 46a and 46b ; - the
figure 51 is a schematic perspective view of the means of cooperation of the apparatus illustrated on theFigures 46a and 46b ; - the
Figures 52a and 52b are schematic views in longitudinal section, respectively horizontal and vertical, of the cooperation means illustrated in FIG.figure 51 .
La suite de la description de l'invention comprend principalement trois parties, avec :
- une première partie dédiée spécifiquement à l'appareil d'exercice conforme à l'invention et ses caractéristiques structurelles ;
- une deuxième partie relative plus spécifiquement au procédé de commande conforme à l'invention ; et
- une troisième partie consacrée à l'utilisation de l'appareil et du procédé conformes à l'invention.
- a first part dedicated specifically to the exercise machine according to the invention and its structural characteristics;
- a second part relating more specifically to the control method according to the invention; and
- a third part devoted to the use of the apparatus and method according to the invention.
La première partie de la description relative à la structure de l'appareil conforme à l'invention est faite ci-dessous.The first part of the description relating to the structure of the apparatus according to the invention is made below.
L'invention concerne un appareil 1 d'exercice adapté à la rééducation et/ou l'entraînement physique d'une partie du corps d'un utilisateur, tel qu'un membre supérieur et/ou inférieur. Cet appareil 1 est adapté pour faire travailler les membres à la fois supérieurs et inférieurs de l'utilisateur, ainsi que d'autres parties du corps comme les hanches ou le bassin. En outre, cet appareil 1 est également conçu pour réaliser des exercices musculaires et articulaires du membre en question.The invention relates to an
En référence aux
un corps 2 creux, ouvert à l'une de ses extrémités 20 et s'étendant selon un axe principal A ;- un organe mobile 3, dit bras pour la suite de la description, déplaçable en translation à l'intérieur du corps 2 selon l'axe principal A et traversant l'extrémité ouverte 20
dudit corps 2,ledit bras 3 étant déplaçable entre une position rétractée illustrée auxfigures 3a à 3c et une position déployée illustrée enfigure 3d ; - un moyen de
liaison 4 adapté pour relier une partie du membre de l'utilisateuraudit bras 3 afin que ledit membre puisse imposer un effort de déplacementaudit bras 3 et inversement, autrement dit afin que le membre puisse tirer et pousser lebras 3 et que lebras 3 puisse tirer et pousser le membre ; - un moyen moteur 5 fixé sur le corps 2 et relié
audit bras 3, ledit moyen moteur 5 étant adapté pour d'une part, dans un mode d'entraînement, entraîner en déplacement lebras 3 dans les deux sens de translation, et pour d'autre part, dans un mode de freinage, freiner le déplacement dubras 3 dans les deux sens de translation.
- a
hollow body 2, open at one of itsends 20 and extending along a principal axis A; - a
movable member 3, said arm for the rest of the description, movable in translation inside thebody 2 along the main axis A and through theopen end 20 of saidbody 2, saidarm 3 being movable between a retracted position illustrated inFigures 3a to 3c and a deployed position illustrated infigure 3d ; - a connecting
means 4 adapted to connect a portion of the user's limb to saidarm 3 so that said limb can impose a displacement force on saidarm 3 and vice versa, in other words so that the limb can pull and push thearm 3 and that thearm 3 can pull and push the member; - a motor means 5 fixed to the
body 2 and connected to saidarm 3, said motor means 5 being adapted for firstly, in a driving mode, to cause thearm 3 to move in both translation directions, and for d secondly, in a braking mode, braking the movement of thearm 3 in both directions of translation.
Le corps 2 est un corps allongé selon l'axe principal A qui présente l'extrémité ouverte 20 et un fond 21 sur l'extrémité opposée à l'extrémité ouverte 20. De façon non limitative, le corps 2 est réalisé à partir de deux demi-coquilles assemblées entre elles ; ces deux demi-coquilles étant par exemple réalisées par moulage d'une matière plastique ou par déformation d'une tôle métallique. Le corps 2 délimite intérieurement une cavité 22 longiligne.The
Le corps 2 supporte un moyen de coopération 6 entre le corps 2 et un bâti, comme par exemple un portique, un mur ou le sol ou tout autre élément fixe. Ce moyen de coopération 6 est disposé sur le fond 21 à l'autre extrémité du corps 2 opposée à l'extrémité ouverte 20.The
Comme visible en
Comme illustré en
- des butées pour limiter la rotation de la première
liaison pivot 61 autour de l'axe principal A sur un secteur angulaire SA1 ; et - des butées pour limiter la rotation de la seconde
liaison pivot 62 autour d'un axe perpendiculaire à l'axe principal A sur un secteur angulaire SA2.
- stops for limiting the rotation of the
first pivot connection 61 around the main axis A on an angular sector SA1; and - stops for limiting the rotation of the
second pivot link 62 about an axis perpendicular to the main axis A on an angular sector SA2.
Ces deux secteurs d'angle SA1 et SA2 définissent ainsi une portion de cône CO de liberté pour le bras 3. De façon préférentielle, les butées sont réglables ou positionnables, de manière automatisée ou manuelle, afin de régler les secteurs angulaires SA1 et SA2 sur une plage comprise entre 0 et 360°.These two corner sectors SA1 and SA2 thus define a cone portion CO of freedom for the
Il est également envisageable que le moyen d'articulation 60 offre plus de deux degrés de liberté (par exemple trois) en prévoyant plus de deux liaisons pivot ; le nombre de liaisons pivots et l'orientation des axes respectifs de rotation concourant à délimiter un espace à l'intérieur duquel l'utilisateur peut déplacer le bras 3.It is also conceivable that the articulation means 60 offers more than two degrees of freedom (for example three) by providing more than two pivot links; the number of pivot links and the orientation of the respective axes of rotation contributing to delimit a space within which the user can move the
Avec deux butées par liaison pivot, il est possible de jouer sur la position desdites butées pour définir un couloir (plus ou moins étroit suivant la position relative des butées) à l'intérieur duquel l'utilisateur peut déplacer le bras 3. De la sorte, l'utilisateur peut suivre une trajectoire dans l'espace en restant dans le couloir défini entre les différentes butées.With two abutments pivot connection, it is possible to play on the position of said stops to define a corridor (more or less narrow depending on the relative position of the stops) within which the user can move the
Concernant les butées, ces dernières peuvent être pourvues d'un système de sécurité de sorte que, au-delà d'un effort prédéterminé imprimé par l'utilisateur sur une butée, le système de sécurité correspondant se déclenche en libérant la butée, c'est-à-dire en laissant l'utilisateur sortir de la limitation angulaire définie par la butée en question. Un tel système de sécurité est avantageusement conçu pour revenir en position initiale, c'est-à-dire qu'il est possible de réarmer le système de sécurité (après déclenchement) pour que la butée retrouve sa fonction première de bloquer angulairement la liaison pivot correspondante.With regard to the stops, the latter can be provided with a security system so that, beyond a predetermined force printed by the user on an abutment, the corresponding security system is triggered by releasing the stop, c ' that is to say, leaving the user out of the angular limitation defined by the abutment in question. Such a security system is advantageously designed to return to the initial position, that is to say that it is possible to reset the security system (after release) so that the stop finds its primary function of angularly locking the pivot connection corresponding.
Un tel moyen d'articulation 60 est également illustré de façon schématique en
Le moyen amovible 63 est fixé sur le support mobile et est par exemple réalisé sous la forme d'un moyen de clipage, d'encastrement démontable, de vissage, de ventouse ou de tout autre moyen équivalent. Il est ainsi possible de fixer le corps 2 de l'appareil 1 de façon amovible sur le support mobile via ce moyen amovible 63, pour pouvoir monter et démonter aisément et rapidement l'appareil 1 sur le bâti B. Dans une variante non illustrée, le moyen d'articulation 60 et le moyen amovible 63 sont inversés en position, c'est-à-dire que le moyen amovible 63 est fixé directement sur le corps 2 tandis que le moyen d'articulation 60 est fixée directement sur le support mobile dans le bâti B.The detachable means 63 is fixed on the movable support and is for example made in the form of a clipping means, removable collapse, screwing, suction cup or any other equivalent means. It is thus possible to fix the
Comme illustré en
Un dispositif d'exercice musculaire et/ou articulaire conforme à l'invention comprend :
un appareil 1 d'exercice conforme à l'invention ; et- un bâti B dans lequel est monté à coulissement un support ;
- an
exercise apparatus 1 according to the invention; and - a frame B in which is slidably mounted a support;
En variante, le moyen de coopération 6 peut être fixé sur une masse lourde, du type fonte, ou sur une masse inertielle gyroscopique, et non directement sur un bâti. Une fois l'exercice terminé, l'appareil 1 pourra être désolidarisé de son support (bâti, masse lourde, chariot, rail ou portique) et ensuite être rangé ou transporté. Il est également envisageable de motoriser le déplacement de l'appareil 1 sur le rail R afin d'assurer un positionnement automatique dudit appareil 1 dans le rail R.In a variant, the cooperation means 6 may be fixed on a heavy mass, of the cast type, or on a gyroscopic inertial mass, and not directly on a frame. Once the exercise is completed, the
Le moyen d'articulation 6 peut également se présenter sous la forme d'une liaison unique à rotule présentant trois degrés de liberté en rotation.The articulation means 6 may also be in the form of a single ball joint having three degrees of freedom in rotation.
Dans les
Le bras 3 est une pièce allongée montée à coulissement à l'intérieur du corps 2. Le corps 2 supporte intérieurement des moyens de guidage du bras 3 afin de supporter les efforts radiaux perpendiculaires à l'axe principal A et de guider le bras 3 dans son mouvement de translation. Par exemple, les moyens de guidage comprennent des rails fixés sur le corps 2, dans la cavité 22, où vient glisser un chariot solidaire du bras 3.The
Pour permettre les exercices à la fois pour les membres inférieurs et supérieurs et pour des raisons de compacité, le corps 2 est d'une longueur comprise entre 700 et 1500 mm, avantageusement entre 1000 et 1200 mm. Pour les mêmes raisons, le bras 3 présente une course maximale de translation comprise entre 500 et 1000 mm, avantageusement entre 700 et 800 mm.To allow exercises for both the lower and upper limbs and for reasons of compactness, the
Le bras 3 présente deux extrémités opposées, à savoir :
- une première extrémité 31 dite extrémité libre et sur laquelle est disposé le moyen de
liaison 4 afin que l'utilisateur puisse déplacer lebras 3 dans les deux sens et également pour que lebras 3 puisse déplacer le membre l'utilisateur ; et - une deuxième extrémité 32 en liaison avec le moyen moteur 5 afin que le moyen moteur puisse déplacer le
bras 3 dans les deux sens et également pour que le déplacement dubras 3 puisse être freiné par le moyen moteur 5.
- a
first end 31 said free end and on which is disposed the connectingmeans 4 so that the user can move thearm 3 in both directions and also so that thearm 3 can move the user member; and - a
second end 32 in connection with the motor means 5 so that the motor means can move thearm 3 in both directions and also so that the movement of thearm 3 can be braked by the motor means 5.
Dans une variante non illustrée, l'organe mobile est réalisé sous la forme d'un bras télescopique.In a variant not shown, the movable member is in the form of a telescopic arm.
Le moyen de liaison 4 est adapté pour que la partie du corps de l'utilisateur puisse :
- à la fois tirer et pousser le
bras 3, le fait de tirer lebras 3 consistant à déplacer lebras 3 de la position rétractée vers la position déployée, et le fait de pousser le bras consistant à déplacer lebras 3 de la position déployée vers la position rétractée ; et/ou - à la fois être tiré et être poussé
par le bras 3.
- both pulling and pushing the
arm 3, pulling thearm 3 of moving thearm 3 from the retracted position to the deployed position, and pushing the arm of moving thearm 3 from the deployed position to the retracted position; and or - both being pulled and being pushed by the
arm 3.
Le moyen de liaison 4 peut prendre différentes formes en fonction notamment de la partie du corps à exercer, comme par exemple :
- un moyen de préhension pour une main, comme par exemple une poignée sphérique (illustrée sur les
figures 3 à 7 ), une poignée articulée du type notamment poignée à rotule offrant plusieurs degrés de liberté en rotation ou poignée pivotante offrant un seul degré de liberté en rotation, ou une surface formant prise pour la main ménagée sur la première extrémité 31 dubras 3 ; - une sangle ou une attache pour attacher le
bras 3 autour d'une partie du corps de l'utilisateur, comme par exemple une sangle qui passe autour d'un membre (par exemple au niveau du genou, de la cheville, de la cuisse d'une jambe ou au niveau du poignet, du coude, de l'épaule du bras) ou d'une autre partie du corps (autour du bassin, de la hanche, du dos etc.) de l'utilisateur.
- gripping means for a hand, such as a spherical handle (illustrated on the
Figures 3 to 7 ), an articulated handle of the type, in particular a ball-and-socket handle with several degrees of freedom in rotation, or a pivoting handle offering a single degree of freedom in rotation, or a surface forming a hand-grip formed on thefirst end 31 of thearm 3; - a strap or a fastener for attaching the
arm 3 around a part of the user's body, such as for example a strap which passes around a limb (for example at the knee, ankle, thigh, one leg or at the wrist, elbow, shoulder of the arm) or other part of the body (around the pelvis, hip, back etc.) of the user.
Il est ainsi envisageable d'avoir plusieurs moyens de liaison 4 en accessoire de l'appareil 1 pour faire le lien entre le bras 3 et les différentes parties du corps de l'utilisateur ; lesdits moyens de liaison 4 étant adaptés à la partie du corps (membre ou autre) à exercer, comme par exemple le coude, le genou, la main, la cheville etc. Ainsi, les moyens de liaison 4 sont fixés de façon amovible sur le bras 3 afin de pouvoir les monter, démonter, interchanger et remplacer l'un l'autre.It is thus conceivable to have several connecting
Dans une première réalisation du moyen moteur 5 illustrée en figurer 24, appelée pour la suite la réalisation « réversible quatre quadrants », ledit moyen moteur 5 comprend :
- un moteur rotatif 50 dit réversible et prévu pour un fonctionnement quatre quadrants ; et
- des moyens de
conversion 51 réversible du mouvement de rotation du moteur rotatif 50 en un déplacement en translation dubras 3, lesdits moyens deconversion 51 permettant ainsi la transmission du mouvement entre la sortie du moteur 50 et lebras 3 et inversement dans les deux sens de translation dubras 3.
- a
rotary motor 50 said reversible and provided for operation four quadrants; and - conversion means 51 reversibly rotational movement of the
rotary motor 50 in translation displacement of thearm 3, said conversion means 51 thus allowing the transmission of movement between the output of themotor 50 and thearm 3 and vice versa in both directions translation of thearm 3.
Le moteur rotatif 50 réversible fonctionne en quatre quadrants, c'est-à-dire qu'il peut fonctionner à la fois :
- dans un mode d'entraînement, autrement appelé mode moteur, où le moteur 50
entraîne le bras 3 en translation dans l'un ou l'autre sens de translation ; et - dans un mode de freinage, autrement appelé mode de régénération ou mode générateur, où le moteur 50 freine le déplacement du
bras 3 dans l'un ou l'autre sens de translation.
- in a drive mode, otherwise called motor mode, where the
motor 50 drives thearm 3 in translation in either direction of translation; and - in a braking mode, otherwise called regeneration mode or generator mode, where the
motor 50 brakes the movement of thearm 3 in one or the other direction of translation.
Ce fonctionnement quatre quadrants est illustré en
- le premier quadrant Q1 correspond un mode moteur où la vitesse en sortie du moteur et la direction du couple moteur ont le même sens de rotation (ici un sens horaire) et où le moteur 50
entraîne le bras 3 en translation dans un premier sens de translation, dit sens positif correspondant à un déplacement de la position rétractée vers la position déployée, tandis que l'utilisateur ne résiste pas à ce déplacement voire le soutient en tirant sur lebras 3 ; - le deuxième quadrant Q2 correspond un mode freinage où la vitesse en sortie du moteur et la direction du couple moteur ont des sens opposés de rotation, respectivement un sens antihoraire et un sens horaire, et où le
bras 3 est déplacé par l'utilisateur dans le sens positif de translation, c'est-à-dire tiré par l'utilisateur, tandis que le moteur 50 freine ce déplacement ; - le troisième quadrant Q3 correspond un mode moteur où la vitesse en sortie du moteur et la direction du couple moteur ont le même sens de rotation (ici un sens antihoraire opposé au sens horaire) et où le moteur 50
entraîne le bras 3 en translation dans un deuxième sens de translation, dit sens négatif opposé au sens positif et correspondant à un déplacement de la position déployée vers la position rétractée, tandis que l'utilisateur ne résiste pas à ce déplacement voire le soutient en poussant sur le bras ; - le quatrième quadrant Q4 correspond un mode freinage où la vitesse en sortie du moteur et la direction du couple moteur ont des sens opposés de rotation, respectivement un sens horaire et un sens antihoraire, et où le
bras 3 est déplacé par l'utilisateur dans le sens négatif de translation, c'est-à-dire poussé par l'utilisateur, tandis que le moteur 50 freine ce déplacement.
- the first quadrant Q1 corresponds to a motor mode in which the speed at the output of the motor and the direction of the engine torque have the same direction of rotation (here a clockwise direction) and where the
motor 50 drives thearm 3 in translation in a first direction of translation , said positive sense corresponding to a displacement from the retracted position to the deployed position, while the user does not resist this movement or even supports it by pulling on thearm 3; - the second quadrant Q2 corresponds to a braking mode in which the speed at the output of the motor and the direction of the motor torque have opposite directions of rotation, respectively counterclockwise and clockwise, and where the
arm 3 is moved by the user into the positive direction of translation, that is to say pulled by the user, while themotor 50 brakes this movement; - the third quadrant Q3 corresponds to a motor mode in which the speed at the output of the motor and the direction of the engine torque have the same direction of rotation (in this case a counterclockwise direction opposite to the clockwise direction) and where the
motor 50 drives thearm 3 in translation in a direction second direction of translation, said negative direction opposite to the positive direction and corresponding to a displacement of the deployed position to the retracted position, while the user does not resist this movement or even supports it by pushing on the arm; - the fourth quadrant Q4 corresponds to a braking mode in which the output speed of the motor and the direction of the motor torque have opposite directions of rotation, respectively a clockwise direction and a counterclockwise direction, and where the
arm 3 is moved by the user in the negative direction of translation, that is to say pushed by the user, while themotor 50 brakes this movement.
Dans cette réalisation « réversible quatre quadrants » du moyen moteur 5, le moyen moteur 5 comprend éventuellement un variateur 52 de vitesse pour le moteur 150 ; ledit variateur 52 étant du type électrique réversible avec une alimentation électrique également réversible relié au secteur S. En effet, l'alimentation 52 doit être réversible en tension et en courant pour que, en mode freinage du moteur 50, l'énergie puisse être soit dissipée soit renvoyée vers le réseau électrique. Le moteur 50 est ensuite relié au bras 3 via les moyens de conversion 51 réversibles.In this "reversible four quadrant" embodiment of the motor means 5, the motor means 5 optionally comprises a
Lorsque le moteur 50 réversible électrique fonctionne en mode de freinage, c'est-à-dire quand le moteur 50 doit exercer sur le bras 3 une force opposée au sens de déplacement du bras 3, le moteur 50 fabrique (ou génère) du courant électrique. Cette puissance électrique ainsi générée par le moteur 50 est par exemple dissipée sous forme de chaleur à travers une charge ou résistance variable 53 visible en
Dans une deuxième réalisation du moyen moteur 5 illustrée en
- un moteur rotatif 150 prévu pour un fonctionnement deux quadrants ;
un variateur 152 de vitesse pour le moteur 150, relié électriquement au secteur S ; et- des moyens de
conversion 151 réversible du mouvement de rotation du moteur rotatif 150.
- a
rotary motor 150 provided for two quadrant operation; - a
speed variator 152 for themotor 150, electrically connected to the sector S; and - reversible conversion means 151 of the rotational movement of the
rotary motor 150.
Le moteur 150 fonctionne uniquement dans les deux quadrants Q1 et Q3 décrits ci-dessus.The
Dans cette réalisation « réversible deux quadrants » du moyen moteur 5, le mode générateur n'est plus utilisé par rapport à la réalisation « réversible quatre quadrants », le freinage s'effectue en créant dans le moteur 150 un couple résistant. Le principe est ainsi de créer un couple (ou une force) qui s'oppose au déplacement à la rotation du moteur 150 afin de freiner le mouvement.In this "reversible two-quadrant" embodiment of the motor means 5, the generator mode is no longer used with respect to the "four-quadrant reversible" embodiment, the braking is carried out by creating a resistive torque in the
Dans une troisième réalisation du moyen moteur 5 illustrée en
- un moteur rotatif 250 non réversible prévu pour un fonctionnement uniquement en mode moteur et pour effectuer des déplacements avant et arrière sans mode de freinage interne au moteur 250 ;
un variateur 252 de vitesse pour le moteur 250, relié électriquement au secteur S ; et- des moyens de
conversion 251 irréversibles du mouvement de rotation du moteur rotatif 250 et pourvus de moyens de freinage par frottement mécanique.
- a non-reversible
rotary motor 250 provided for operation only in engine mode and to perform forward and reverse movements without internal braking mode to theengine 250; - a
speed variator 252 for themotor 250, electrically connected to the sector S; and - irreversible conversion means 251 of the rotational movement of the
rotary motor 250 and provided with mechanical friction braking means.
Dans cette réalisation « irréversible avec frottement mécanique dans la conversion » du moyen moteur 5, le moteur 250 fonctionne tout le temps en mode moteur et les moyens de conversion 251 ne sont pas réversibles. Si un effort s'exerce sur le bras 3, les moyens de conversion 251 mécaniques bloqueront automatiquement le déplacement du bras 3 dû à cet effort grâce aux frottements mécaniques internes aux moyens de conversion 251, ainsi qu'illustré schématiquement par la flèche RM traduisant la résistance mécanique interne par frottement des moyens de conversion 251.In this embodiment "irreversible with mechanical friction in the conversion" of the motor means 5, the
Dans le cas où le moyen moteur 5 doit créer un effort pour déplacer le bras 3, le moteur 250 devra fournir, en plus de l'effort nécessaire pour déplacer le bras 3, un effort supplémentaire indispensable pour vaincre les frottements mécaniques internes des moyens de conversion 251. Dans le cas où le moyen moteur 5 doit s'opposer à un déplacement du bras 3, le moteur 250 fonctionnera éventuellement en mode moteur pour accompagner l'effort extérieur appliqué sur le bras 3. Sans alimentation en courant, le bras 3 est bloqué en position du fait des frottements internes des moyens de conversion 251.In the case where the motor means 5 must create a force to move the
Dans une quatrième réalisation du moyen moteur 5 illustrée en
- un moteur rotatif 350 non réversible prévu pour un fonctionnement uniquement en mode moteur et pour effectuer des déplacements avant et arrière sans mode de freinage interne au moteur 350 ;
un variateur 352 de vitesse pour le moteur 350, relié électriquement au secteur S ;- des moyens de
conversion 351 irréversibles du mouvement de rotation du moteur rotatif 350 ; et - un frein mécanique 354 disposé en parallèle du moteur 350 et conçu pour freiner le déplacement du
bras 3.
- a non-reversible
rotary motor 350 provided for operation only in the engine mode and to move forward and backward without internal braking mode to theengine 350; - a
speed variator 352 for themotor 350, electrically connected to the sector S; - irreversible conversion means 351 of the rotational movement of the
rotary motor 350; and - a
mechanical brake 354 arranged in parallel with themotor 350 and designed to slow the movement of thearm 3.
Dans cette réalisation « irréversible avec frein mécanique » du moyen moteur 5, le moteur 350 fonctionne tout le temps en mode moteur et les moyens de conversion 351 ne sont pas réversibles. Dans le cas où le moyen moteur 5 doit freiner le déplacement du bras 3, le moteur 350 n'est pas alimenté électriquement et le frein mécanique 354 s'occupe de créer un contre-effort qui s'oppose au déplacement du bras 3.In this "irreversible with mechanical brake" embodiment of the motor means 5, the
Les moteurs 50, 150, 250, 350 peuvent par exemple être réalisés sous la forme de l'un des types suivants de moteur électrique :
- moteur à courant continu ;
- moteur universel ;
- moteur synchrone du type moteur à aimants permanents dit moteur « brushless » ou moteur sans balai, moteur à réluctance variable, moteur pas à pas, moteur hybride ou moteur à hystérésis ;
- moteurs asynchrone du type moteur triphasés à cage, moteur monophasé ou moteur pas à pas ;
- moteur piézoélectrique ;
- servomoteurs à courant continu ;
- servomoteurs asynchrone ;
- servomoteur à aimants permanents dit « brushless » (AC et DC).
- DC motor ;
- universal motor;
- synchronous motor of the permanent magnet motor type, said brushless motor or brushless motor, variable reluctance motor, stepper motor, hybrid motor or hysteresis motor;
- asynchronous motors of the three-phase cage motor type, single-phase motor or stepper motor;
- piezoelectric motor;
- DC servomotors;
- asynchronous servomotors;
- servomotor with permanent magnets called "brushless" (AC and DC).
Les
Dans le premier mode de réalisation illustré aux
une courroie 510 liée en rotation d'une part à l'arbre moteur 500 rotatif du moteur 50 et d'autre part à une poulie 511 fixée surun support 24 solidaire ducorps 2,ledit support 24 s'étendant sur une partie de la longueur ducorps 2 à l'intérieur dubras 3 et ladite courroie 510 traversant leditsupport 24 ;- une roue dentée 512 solidaire en rotation de la poulie 511 et fixée sur le
support 24 ; et une crémaillère 513 en engrènement avec la roue dentée 512 et fixée sur lebras 3.
- a
belt 510 rotatably connected on the one hand to therotary motor shaft 500 of themotor 50 and on the other hand to apulley 511 fixed on asupport 24 integral with thebody 2, saidsupport 24 extending over a part of the length of thebody 2 inside thearm 3 and saidbelt 510 passing through saidsupport 24; - a
toothed wheel 512 integral in rotation with thepulley 511 and fixed on thesupport 24; and - a
rack 513 in meshing with thetoothed wheel 512 and fixed on thearm 3.
Ainsi, la rotation de l'arbre moteur 500 entraîne en rotation la poulie 512 via la courroie 510, et ladite poulie 511 entraîne en rotation la roue dentée 512 qui, en tournant, déplace en translation le bras 3 via la crémaillère 513. Dans ce mode de réalisation, l'arbre moteur 500 s'étend selon un axe perpendiculaire à l'axe principal A. Comme illustré, le moteur 50 dépasse éventuellement du corps 2 via une ouverture adéquate ménagée dans ledit corps 2.Thus, the rotation of the
Dans le deuxième mode de réalisation illustré à la
- un arbre fileté 514 (par exemple du type vis à bille) entraîné en rotation par le moteur 50, constituant de ce fait l'arbre de sortie dudit moteur 50 et traversant la deuxième extrémité 32 du
bras 3 viaun palier 515 ; et - une pièce formant écrou 516 fixée sur le
bras 3 et pourvue d'un orifice fileté coopérant avec l'arbre fileté 514.
- a threaded shaft 514 (for example of the ball screw type) rotated by the
motor 50, thereby constituting the output shaft of saidmotor 50 and passing through thesecond end 32 of thearm 3 via abearing 515; and - a
nut member 516 fixed to thearm 3 and provided with a threaded orifice cooperating with the threadedshaft 514.
Ainsi, l'arbre fileté 514 et la pièce formant écrou 516 forment ensemble un système vis/écrou de transformation d'un mouvement de rotation en mouvement de translation : la rotation de l'arbre fileté 514 entraîne en translation la pièce formant écrou 516 qui entraîne en translation le bras 3. Dans ce mode de réalisation, l'arbre fileté 514 s'étend selon l'axe principal A.Thus, the threaded
Dans le troisième mode de réalisation illustré aux
une courroie 517 liée en rotation à l'arbre moteur 500 qui s'étend selon un axe perpendiculaire à l'axe principal A ;- des galets 518 s'étend selon des axes respectifs perpendiculaires à l'axe principal A et guidant le déplacement de la courroie 517 afin que ladite courroie présente une longue portion plane, entre deux galets, qui est parallèle à l'axe principal A le long du
bras 3, lesdits galets 518 étant ici au nombre de cinq et étant fixés surun support 24 solidaire du corps 2 et s'étendant sur une partie de la longueur ducorps 2 à l'intérieur dubras 3 ; - une pièce de connexion 519 solidaire à la fois du
bras 3 et de la longue portion plane de la courroie 517.
- a
belt 517 rotatably connected to thedrive shaft 500 which extends along an axis perpendicular to the main axis A; -
rollers 518 extend along respective axes perpendicular to the main axis A and guide the movement of thebelt 517 so that said belt has a long flat portion between two rollers, which is parallel to the main axis A alongarm 3, saidrollers 518 being here five in number and being fixed on asupport 24 integral with thebody 2 and extending over a portion of the length of thebody 2 inside thearm 3; - a connecting
piece 519 secured to both thearm 3 and the long flat portion of thebelt 517.
Ainsi, la rotation de l'arbre moteur 500 entraîne en rotation la courroie 517 autour des galets 518, de sorte que la pièce de connexion 519 est entraînée en translation entre les deux galets 518 délimitant la longue portion plane de ladite courroie 517, entraînant ainsi en translation le bras 3.Thus, the rotation of the
Dans le quatrième mode de réalisation illustré aux
une courroie 519 liée en rotation à l'arbre moteur 500 qui s'étend selon un axe parallèle à l'axe principal A ;une poulie 520 permettant un renvoi à angle droit de la courroie 519 afin que ladite courroie présente une longue portion plane, entre la poulie 520et un galet 521, ladite poulie 520 et ledit galet 521 étant fixés surun support 24 solidaire du corps 2 et s'étendant sur une partie de la longueur ducorps 2 à l'intérieur dubras 3 ;- une pièce de connexion 522 solidaire à la fois du
bras 3 et de la longue portion plane de la courroie 519.
- a
belt 519 rotatably connected to thedrive shaft 500 which extends along an axis parallel to the main axis A; - a
pulley 520 allowing a right-angle return of thebelt 519 so that said belt has a long flat portion, between thepulley 520 and aroller 521, saidpulley 520 and saidroller 521 being fixed on asupport 24 integral with thebody 2 and extending over a portion of the length of thebody 2 inside thearm 3; - a connecting
piece 522 secured to both thearm 3 and the long flat portion of thebelt 519.
Ainsi, la rotation de l'arbre moteur 500 entraîne en rotation la courroie 519 autour de la poulie 520 et du galet 521, de sorte que la pièce de connexion 522 est entraînée en translation entre la poulie 520 et le galet 521, entraînant ainsi en translation le bras 3.Thus, the rotation of the
Dans le cinquième mode de réalisation illustré à la
- deux engrenages coniques 523 en engrènement, le premier étant solidaire en rotation de l'arbre moteur 500 et le second étant entraîné en rotation par le premier engrenage conique autour d'un axe perpendiculaire à l'axe principal A ;
une courroie 524 entraînée en rotation par le deuxième engrenage conique 523 au moyen d'une roue dentée 525 solidaire en rotation de ce deuxième engrenage conique, ladite courroie 524 entraînant ensuite entranslation le bras 3 via des moyens de type connu.
- two meshing
gears 523 meshing, the first being rotatably connected to thedrive shaft 500 and the second being rotated by the first conical gear about an axis perpendicular to the main axis A; - a
belt 524 driven in rotation by thesecond bevel gear 523 by means of atoothed wheel 525 rotationally integral with the second bevel gear, saidbelt 524 then driving thearm 3 in translation via means of known type.
Le moyen moteur 5 peut également comprendre un réducteur 501 de vitesse visible notamment aux
En outre, les moyens de conversion 51 doivent être facilement déplacables par l'utilisateur, préférentiellement sous un effort inférieur à 5 voire 1 newton, dans le cas où le moteur 50 est à l'arrêt ou ne fonctionne pas.In addition, the conversion means 51 must be easily displaceable by the user, preferably under a force of less than 5 or 1 newton, in the case where the
Les
Le bâti B se présente sous la forme d'un portique vertical présentant un rail R dans lequel est monté à coulissement et de façon réglable un support S réalisé sous la forme d'un coulisseau.The frame B is in the form of a vertical gantry having a rail R in which is slidably and adjustably mounted a support S made in the form of a slider.
L'appareil 1 est monté de façon amovible sur ce support S.The
De façon sensiblement équivalente au deuxième mode de réalisation décrit ci-dessus en référence à la
- un moteur rotatif 50 ;
- un arbre fileté 514 (par exemple du type vis à bille) entraîné en rotation par le moteur 50 ; et
- une pièce formant écrou 516 fixée sur le
bras 3 et pourvue d'un orifice fileté coopérant avec l'arbre fileté 514.
- a
rotary motor 50; - a threaded shaft 514 (for example of the ball screw type) rotated by the
motor 50; and - a
nut member 516 fixed to thearm 3 and provided with a threaded orifice cooperating with the threadedshaft 514.
L'appareil 1 comporte un carter 26 fixé sur le fond 21 du corps 2 et dans lequel est monté le moteur rotatif 50.The
Comme illustré sur les
- trois
tirants 27 s'étendant à l'intérieur du corps 2 parallèlement à l'axe principal A et répartis à 120° les uns des autres autour de l'axe principal A ; et un coulisseau 28 monté à coulissement sur chacun des trois tirants 27 et monté fixe sur lebras 3 notamment au moyen des vis 280 visibles sur lafigure 49b , où le coulisseau 28 est fixé, par vissage, sur la pièce formant écrou 516.
- three
tie rods 27 extending inside thebody 2 parallel to the main axis A and distributed at 120 ° to each other around the main axis A; and - a
slide 28 slidably mounted on each of the threetie rods 27 and fixedly mounted on thearm 3, in particular by means of the screws 280 visible on thefigure 49b , where theslider 28 is fixed, by screwing, on thenut part 516.
Le coulisseau 28 se présente sous la forme d'un disque pourvu de trois orifices de passage des tirants 27 respectifs, de manière à ce que la translation de la pièce formant écrou 516, et donc du coulisseau 28 solidaire de cette pièce formant écrou 516, soit guidé par les tirants 27.The
Le bras 3 est creux et les tirants 27 s'étendent à l'intérieur du bras 3 et traversant le fond 21 du corps 2. Les tirants 27 présentent respectivement :
- une extrémité avant 271 fixée, par vissage, sur une pièce formant palier 272 pour l'arbre fileté 514 ; et
- une extrémité arrière 273 fixée, par vissage, sur le
carter 26 du moteur 50.
- a
front end 271 fixed by screwing on abearing part 272 for the threadedshaft 514; and - a
rear end 273 fixed by screwing on thehousing 26 of themotor 50.
Comme illustré sur les
Comme illustré sur les
Les
Chaque moyen moteur secondaire 70 est fixé sur le corps 2, par exemple à l'extérieur du corps 2 de l'appareil 1, ainsi qu'illustré schématiquement en
Chaque moyen moteur secondaire 70 est adapté pour entraîner en rotation le corps 2 dans les deux sens de rotation, et également pour freiner rotation du corps 2 dans les deux sens de rotation. De façon avantageuse, Le ou chaque moyen moteur secondaire 70 comprend un moteur rotatif réversible prévu pour un fonctionnement quatre quadrants.Each secondary motor means 70 is adapted to rotate the
Chaque moyen moteur secondaire 70 comporte un capteur d'angle pour déterminer l'angle de rotation du corps 2 autour de l'axe de rotation associé B1, B2, permettant ainsi de déterminer la position angulaire du corps 2 vis-à-vis de cet axe de rotation.Each secondary motor means 70 comprises an angle sensor for determining the angle of rotation of the
Chaque moyen moteur secondaire 70 est ainsi conçu pour assurer une transmission de mouvement radiale et la puissance de rotation du moteur est calculé en fonction de l'effet levier de l'ensemble corps 2 et bras 3.Each secondary motor means 70 is thus designed to ensure a radial movement transmission and the rotational power of the motor is calculated according to the lever effect of the
Les
- un moteur 71 entraînant en translation un arbre de commande 72, la translation de l'arbre de commande 72 étant illustré par les flèches T sur les figures ;
- une pièce de pivotement 73 fixée, notamment de manière amovible, sur le corps 2, ladite pièce de pivotement 73 s'étendant selon l'axe principal A ;
une articulation 74, notamment du type liaison pivot, entre l'arbre de commande 72 et la pièce de pivotement 73 ;un support 75 de la pièce de pivotement 73 sur un bâti B, où ladite pièce de pivotement 73 est articulée sur lesupport 75 afin de pouvoir pivoter autour d'un axe incliné par rapport à l'axe principal A.
- a
motor 71 driving in translation acontrol shaft 72, the translation of thecontrol shaft 72 being illustrated by the arrows T in the figures; - a pivoting part 73 fixed, in particular removably, on the
body 2, said pivoting part 73 extending along the main axis A; - a
hinge 74, in particular of the pivot connection type, between thecontrol shaft 72 and the pivot piece 73; - a
support 75 of the pivot piece 73 on a frame B, wherein said pivoting piece 73 is articulated on thesupport 75 in order to be pivotable about an axis inclined with respect to the main axis A.
Dans le mode de réalisation de la
En fonctionnement, le moteur 71 déplace l'arbre de commande 72 en translation T de sorte que cet arbre de commande 72 fait pivoter la pièce de pivotement 73, et donc le corps 2, autour du support 75, comme schématisé par la flèche R.In operation, the
L'ensemble du moyen moteur secondaire 70 peut être disposé à l'intérieur d'un caisson CA, illustré par des traits mixtes sur les
Dans une variante non illustrée, le moyen moteur secondaire 70 comprend un ensemble moteur rotatif/réducteur en prise directe sur le corps 2.In a variant not illustrated, the secondary motor means 70 comprises a rotary / gear motor assembly in direct contact with the
Il est également envisageable de prévoir un moyen moteur secondaire qui entraîne en translation le corps 2 le long d'un axe incliné (par exemple à angle droit) par rapport à l'axe principal A. Un tel moyen moteur secondaire en translation pourrait être couplé avec un moyen moteur secondaire tel que décrit ci-avant, c'est-à-dire qui entraîne en rotation le corps 2.It is also conceivable to provide a secondary motor means which drives in translation the
Ce ou ces moyens moteur secondaires 70 permettent ainsi de contraindre la partie du corps de l'utilisateur à suivre une trajectoire délimitée T dans l'espace. Une telle contrainte autour d'une trajectoire T est décrite à la fin de la deuxième partie en référence aux
La deuxième partie relative au procédé de commande conforme à l'invention est faite ci-dessous.The second part relating to the control method according to the invention is made below.
L'invention concerne également un procédé de commande de l'appareil 1 décrit ci-dessus. Ce procédé de commande comporte les étapes suivantes :
- a) enregistrement ou saisie d'au moins une courbe de consigne Cc correspondant à une variation prédéfinie d'un paramètre principal d'exercice PP prédéterminé en fonction d'un paramètre d'état PE tel que le temps ou le déplacement du
bras 3, ledit paramètre principal d'exercice étant représentatif de l'effort de déplacement imposépar le bras 3 à la partie du corps de l'utilisateur ou inversement et notamment choisi parmi la force développée par l'utilisateur sur lebras 3 pour déplacer ou freiner lebras 3, le couple ou la force développés par le moyen moteur 5 pour déplacer ou freiner lebras 3, la vitesse de déplacement dubras 3 et l'accélération du déplacement dubras 3 ; - b) acquisition d'une courbe réelle CR correspondant à la variation du paramètre principal d'exercice PP mesuré pendant l'exercice en fonction du paramètre d'état PE ;
- c) commande du moyen moteur 5 afin d'asservir la courbe réelle CR autour de la courbe de consigne CC pendant l'exercice, ledit moyen moteur 5 étant contrôlé pour déplacer et/ou freiner le
bras 3 dans un mouvement de translation, comme décrit ci-avant dans la première partie de la description.
- a) recording or entering at least one setpoint curve Cc corresponding to a predefined variation of a predetermined main exercise parameter P P as a function of a state parameter P E such that the time or the movement of the
arm 3, said main exercise parameter being representative of the displacement force imposed by thearm 3 on the body part of the user or vice versa and in particular chosen from the force developed by the user on thearm 3 to move or braking thearm 3, the torque or the force developed by the motor means 5 to move or brake thearm 3, the speed of movement of thearm 3 and the acceleration of the displacement of thearm 3; - b) acquiring an actual curve C R corresponding to the variation of the main exercise parameter P P measured during the exercise as a function of the state parameter P E ;
- c) controlling the motor means 5 in order to slave the real curve C R about the setpoint curve C C during the exercise, said motor means 5 being controlled to move and / or brake the
arm 3 in a translational movement, as described above in the first part of the description.
Pour réaliser les différentes étapes du procédé conforme à l'invention, l'appareil 1 est pourvu de moyens pour la mise en oeuvre du procédé, ces moyens comportant un moyen de contrôle 80 réalisé sous la forme d'une unité de contrôle ou unité centrale (visible aux
Pour effectuer l'étape a) d'enregistrement ou de saisie, l'appareil 1 comporte :
- un moyen de stockage 81 (du type mémoire de données numériques) adapté pour enregistrer des courbes de consigne ;
- un moyen de transfert 82 conçu pour transférer des courbes de consigne enregistrées sur un terminal ou un moyen de stockage externe 92 (tel qu'une clé USB, un terminal informatique, un disque d'enregistrement de données numériques, etc.) à destination du moyen de stockage 81 de l'appareil 1 ; et éventuellement
- un moyen de saisie de courbes de consigne par l'utilisateur et/ou une tierce personne, comme par exemple une interface de saisie du type clavier, écran ou similaire.
- storing means 81 (of the digital data memory type) adapted to record set-point curves;
- transfer means 82 designed to transfer setpoint curves recorded on a terminal or external storage means 92 (such as a USB key, a computer terminal, a digital data recording disk, etc.) to the storage means 81 of the
apparatus 1; and eventually - means for entering setpoints by the user and / or a third party, such as an input interface of the keyboard, screen or similar type.
Les moyens de transfert 82 peuvent être du type :
- liaison filaire, par exemple du type liaison par câble ou prise de réception d'un moyen de stockage externe tel qu'une prise USB ou équivalent ; ou
- liaison non filaire, par exemple liaison Wi-Fi ©, BlueTooth © ou équivalent.
- wired link, for example of the cable link type or reception socket of an external storage means such as a USB socket or equivalent; or
- non-wired link, eg Wi-Fi ©, BlueTooth © or equivalent.
En outre, les courbes de consigne peuvent avantageusement être téléchargées à partir d'internet ou d'un message électronique envoyé par un thérapeute ou un entraîneur sportif, puis transférées à partir du terminal informatique de l'utilisateur sur le moyen de stockage 81 de l'appareil 1.In addition, the setpoint curves can advantageously be downloaded from the Internet or an electronic message sent by a therapist or a sports trainer, then transferred from the user's computer terminal to the storage means 81.
Pour effectuer cette étape b) d'acquisition, l'appareil 1 comprend :
- au moins un premier moyen de mesure, pendant l'exercice, du paramètre principal d'exercice PP réel, comme par exemple
un capteur d'effort 83 mesurant l'effort développé sur lebras 3 ou un capteur de vitesse 84 mesurant la vitesse de déplacement dubras 3 ; - au moins un deuxième moyen de mesure, pendant l'exercice, du paramètre d'état PE réel, tel qu'une horloge interne à l'unité centrale ou un capteur de déplacement 85 mesurant le déplacement D du
bras 3.
- at least a first measurement means, during the exercise, of the main exercise parameter P P , such as for example a
force sensor 83 measuring the force developed on thearm 3 or aspeed sensor 84 measuring the speed moving thearm 3; - at least a second measurement means, during exercise, of the actual state parameter P E , such as an internal clock at the central unit or a
displacement sensor 85 measuring the displacement D of thearm 3.
Ces moyens de mesure 83, 84, 85 sont bien entendus reliés à l'unité centrale 80 pour effectuer l'étape b). De même, le moyen de saisie et/ou le moyen de stockage 81 sont reliés à l'unité centrale 80 ; l'unité centrale 80 étant également reliée au moyen moteur 5 (comme visible aux
Pour effectuer l'étape c) de commande ou d'asservissement, l'appareil 1 peut comprendre, ainsi qu'illustré de façon schématique en
un comparateur 98 qui compare la courbe de consigne CC mémorisée dans le moyen de stockage 81 avec les données issues des capteurs 83 à 84, le signal de sortie E du comparateur correspondant à la différence ou l'erreur à compenser pour réaliser l'asservissement ; et- un correcteur ou régulateur 99 qui commande le moyen moteur 5 pour compenser l'erreur E.
- a
comparator 98 which compares the setpoint curve C C stored in the storage means 81 with the data coming from thesensors 83 to 84, the output signal E of the comparator corresponding to the difference or the error to be compensated to achieve the control ; and - a corrector or
regulator 99 which controls the motor means 5 to compensate for the error E.
Les courbes de consigne CC correspondent à des courbes programmées en fonction des objectifs thérapeutiques, physiologiques ou physiques recherchés pour l'utilisateur ou le thérapeute ou l'entrapîneur sportif. L'appareil 1 est ainsi multifonctionnel et évolutif en fonction des besoins du thérapeute, de l'entraîneur sportif ou de l'utilisateur, en jouant sur la ou les courbes de consigne CC.The set-point curves C C correspond to curves programmed according to the therapeutic, physiological or physical objectives sought for the user or the therapist or the sports coach. The
Les
Les
Les différentes courbes de consigne définissent une variation d'un principal d'exercice PP (par exemple l'effort F) en fonction du déplacement D du bras 3 à l'intérieur d'une plage de déplacement prédéfinie. Cette plage de déplacement est délimitée par une valeur minimale Dmin et une valeur maximale Dmax prédéterminées du déplacement du bras 3.The different set-point curves define a variation of an exercise principal P P (for example the force F) as a function of the displacement D of the
La valeur minimale Dmin peut être associée à la position rétractée du bras 3 et la valeur maximale Dmax peut être associée à la position déployée du bras 3 et dans ce cas la plage de déplacement correspond à la course maximale (ou totale) de déplacement du bras 3. Il est également envisageable que l'une ou chacune des valeurs Dmin et Dmax soit associée à une position intermédiaire du bras 3 située entre les deux positions d'extrémité (position rétractée et position déployée), de sorte que la plage de déplacement du bras 3 correspond à une course réduite inférieure à la course maximale de déplacement du bras 3. En jouant sur les valeurs Dmin et Dmax, il est ainsi possible de limiter l'exercice à une plage choisie de déplacement du bras 3, et par exemple de limiter l'exercice à un secteur angulaire choisi d'une articulation.The minimum value Dmin can be associated with the retracted position of the
Les courbes de consigne CC1 à CC4 illustrées aux
- faire travailler l'utilisateur selon un seul sens de déplacement du
bras 3 ; et à - faire revenir le
bras 3 en position initiale de façon motorisée ou à laisser l'utilisateur ramener lebras 3 en position initiale avec le moyen moteur 5 qui offre un effort résistant nul ou quasi nul (par exemple inférieur à 1 Newton).
- operate the user in a single direction of movement of the
arm 3; and - to return the
arm 3 to the initial position in a motorized manner or to let the user bring thearm 3 back to the initial position with the motor means 5 which offers a zero or virtually zero resistance force (for example less than 1 Newton).
Ces courbes de consigne CC1 à CC4 représentent un demi-cycle de déplacement du bras 3, par exemple un déplacement du bras 3 de la position rétractée vers la position déployée ou alors un déplacement du bras 3 de la position déployée vers la position rétractée ; un cycle complet correspondant à un déplacement aller et retour du bras 3.These set-
En
Aux
- une première phase PH1 avec une montée progressive et sans à-coup de l'effort F, sans discontinuité au début du déplacement (à D=0, position initiale) ;
- une deuxième phase PH2 dite de palier avec un effort F constant ou quasi constant ; et enfin
- une troisième phase PH3 avec une descente progressive et sans à-coup de l'effort F, sans discontinuité à la fin du déplacement.
- a first phase PH1 with a gradual and smooth rise of the effort F, without discontinuity at the beginning of the displacement (at D = 0, initial position);
- a second phase PH2 called bearing with a constant or almost constant effort F; and finally
- a third phase PH3 with a gradual and smoothly descent of the effort F, without discontinuity at the end of the displacement.
La
En
Cette courbe de consigne CC4 présente notamment un intérêt pour faire travailler la partie du corps de l'utilisateur avec des paliers d'effort dégressifs.This
La courbe de consigne CC5 illustrée en
- faire travailler l'utilisateur selon un premier sens de déplacement du
bras 3, avec un asservissement autour de la première partie C1 de la courbe de consigneC C5 ; et à - faire travailler l'utilisateur selon un deuxième sens de déplacement du
bras 3 opposé au premier sens, avec un asservissement autour de la deuxième partie C2 de la courbe de consigneC C5.
- to make the user work in a first direction of movement of the
arm 3, with a servocontrol around the first part C1 of thesetpoint curve C C 5; and - operate the user in a second direction of movement of the
arm 3 opposite the first direction, with a servo around the second part C2 of thesetpoint curve C C 5.
Cette courbe de consigne CC5 représente ainsi un cycle complet de déplacement du bras 3 ; le premier demi-cycle correspondant à la première partie de courbe C1 et le deuxième demi-cycle correspondant à la deuxième partie de courbe C2. L'appareil 1 permet en effet de travailler dans les deux sens de translation du bras 3, c'est-à-dire fournir un effort ou une résistance à un effort de compression et de traction ainsi que décrit ci-dessus dans la première partie de la description.This
Sur la
Les deux parties de courbe C1 et C2, correspondant à un effort en traction et en compression (ou poussée), sont totalement indépendantes l'une de l'autre ; chaque partie courbe étant paramétrable de façon distincte et indépendante de l'autre partie de courbe, en fonction de la pathologie à traiter et/ou de l'entraînement adapté à l'utilisateur. Par exemple, les paramètres représentatifs des parties de courbe C1 et C2 illustrées en
Les
En
En
En utilisation, les paramètres de la courbe de consigne Cc sont programmés de façon simple par l'utilisateur, le thérapeute ou l'entraîneur sportif en fonction des besoins de rééducation ou d'entraînement. L'utilisateur qui fera l'exercice n'aura donc qu'à réaliser l'exercice sans contrainte.In use, the parameters of the setpoint curve Cc are simply programmed by the user, the therapist or the sports trainer according to the needs of rehabilitation or training. The user who will do the exercise will only have to perform the exercise without constraint.
Le choix de la courbe de consigne CC peut porter sur le souhait de réaliser un travail en aérobie. Dans ce cas, une courbe de consigne en effort va permettre de prévoir des zones de récupération au sein même de l'exercice (comme la troisième phase PH3 des courbes CC2 et CC3 décrites ci-dessus) et le rythme de l'effort sera étudié pour ne pas déséquilibré le rythme respiratoire pour une bonne oxygénation des muscles et éviter la fabrication de toxine ; les toxines provenant essentiellement d'un travail du muscle sans oxygène, c'est-à-dire en anaérobie. De plus, on peut programmer la courbe de consigne pour que les rythmes respiratoire et cardiaque ne soient plus calqués sur la totalité de la phase d'effort.The choice of the setpoint curve C C may relate to the desire to perform aerobic work. In this case, a force setpoint curve will make it possible to provide recovery zones within the exercise itself (such as the third phase PH3 of the curves C C 2 and
Le choix de la courbe de consigne CC peut également porter sur le souhait d'éviter des efforts violents : avec la programmation de l'effort, il n'y a plus d'effort violent, mais une montée en puissance progressive jusqu'à un effort maximum préréglé comme dans le cas des courbes Cc2 et CC3 décrites ci-dessus. Les à-coups sont donc supprimés et l'effort est progressif ce qui sollicite moins les tendons, les articulations et le coeur, rendant ainsi les exercices accessibles aux personnes ayant des préconisations cardio-vasculaires.The choice of the setpoint curve C C can also relate to the desire to avoid violent efforts: with the programming of the effort, there is no more violent effort, but a gradual increase in power up to maximum effort preset as in the case of curves and
Le choix de la courbe de consigne CC peut également porter sur le souhait faire travail une chaîne musculaire souhaitée : l'effort est ciblé pour une ou plusieurs chaînes musculaires choisies, les autres n'étant pas sollicitées sont au repos. L'exercice semble donc plus souple et plus agréable pour l'utilisateur. Il devient donc possible de faire travailler une chaîne cinétique unique. La programmation peut cibler l'effort sur une plage précise de déplacement du muscle pour travailler uniquement quelques fibres musculaires et solliciter les autres au minimum, par exemple dans le cas où l'utilisateur à des problèmes musculaires.The choice of the setpoint curve C C can also relate to the wish to work a desired muscle chain: the effort is targeted for one or more selected muscle chains, the others not being requested are at rest. The exercise therefore seems more flexible and more enjoyable for the user. It becomes possible to work a unique kinetic chain. The programming can target the effort on a precise range of muscle displacement to work only a few muscle fibers and solicit the others to a minimum, for example in the case where the user has muscle problems.
De plus, l'avantage de pouvoir programmer les courbes de consigne CC est de pouvoir supprimer l'effort d'accompagnement du retour de façon à ne faire travailler qu'un seul groupe de muscles sans solliciter les chaînes antagonistes, comme dans le cas des courbes Cc2 et CC3, ou au contraire d'avoir un effort lors du retour, comme dans le cas de la courbe CC5. La deuxième partie de courbe C2 (effort lors du retour) est programmée pour s'inscrira dans la continuité avec la première partie de courbe C1 (effort lors de l'aller) de façon à ne pas faire subir d'à-coups lors de l'inversion du sens de déplacement.Moreover, the advantage of being able to program the setpoint curves C C is to be able to suppress the accompanying effort of the return so as to make work only one group of muscles without soliciting the antagonistic chains, as in the case Cc2 of the curves C and C 3, or conversely to have a stress on the return, as in the case of
Comme dans le cas de la courbe CC5, l'appareil 1 permet avantageusement d'associer un effort de traction avec un effort de poussée. Cela signifie que l'appareil 1 pourra faire travailler deux chaînes bien distinctes de muscles dans le même mouvement, tout en éliminant les discontinuités d'efforts préjudiciables aux articulations, tendons, coeur, etc. et rendre ainsi la séance bien plus agréable. Une telle programmation permet en outre un gain de temps de 50% du temps d'exercice en faisant travailler deux chaînes distinctes de muscles dans le même mouvement.As in the case of the
Le procédé conforme à l'invention comprend en outre l'étape de mesure d) suivante consistant à mesurer pendant l'exercice d'au moins un paramètre de consigne PC choisi parmi :
- un paramètre d'exercice secondaire PS distinct du paramètre d'exercice principal PP, ledit paramètre d'exercice secondaire PS étant représentatif de l'effort de déplacement imposé
par le bras 3 à la partie du corps de l'utilisateur ou inversement et notamment choisi parmi la force développée par l'utilisateur sur lebras 3 pour déplacer ou freiner lebras 3, le couple ou la force développés par le moyen moteur 5 pour déplacer ou freiner lebras 3, la vitesse de déplacement dubras 3, et l'accélération du déplacement dubras 3 ; et/ou - un paramètre physiologique PPHY représentatif de l'état physiologique du sujet et choisi notamment parmi l'activité électromyographique, le rythme respiratoire, le rythme cardiaque, la température de l'utilisateur, le taux d'oxygène dans le sang, la tension artérielle, et la sudation ; et/ou
- un paramètre de durée PD représentatif de la durée de l'exercice et choisi notamment parmi la durée de l'exercice, le nombre de cycle de déplacement effectué
par le bras 3, le temps nécessaire à l'utilisateur pour effectuer un ou plusieurs déplacements prédéterminés dubras 3 ; et/ou - un paramètre d'environnement PE représentatif de l'environnement externe dans lequel l'utilisateur effectue l'exercice et choisi notamment parmi la température ambiante externe, le taux d'humidité externe, la pression ambiante externe.
- a secondary exercise parameter P S distinct from the main exercise parameter P P , said secondary exercise parameter P S being representative of the displacement force imposed by the
arm 3 on the body part of the user or vice versa and in particular chosen from the force developed by the user on thearm 3 to move or brake thearm 3, the torque or the force developed by the motor means 5 to move or brake thearm 3, the speed of movement of thearm 3, and the acceleration of the movement of thearm 3; and or - a physiological parameter P PHY representative of the physiological state of the subject and chosen in particular from electromyographic activity, respiratory rate, heart rate, user temperature, blood oxygen level, blood pressure, and sweating; and or
- a parameter of duration P D representative of the duration of the exercise and chosen in particular from the duration of the exercise, the number of movement cycle performed by the
arm 3, the time required for the user to perform one or more displacements predeterminedarms 3; and or - an environmental parameter P E representative of the external environment in which the user performs the exercise and chosen in particular from the external ambient temperature, the external humidity rate, the external ambient pressure.
Pour effectuer cette étape d) de mesure, l'appareil 1 comprend au moins un troisième moyen de mesure du paramètre de consigne PC, comme par exemple :
- un capteur du paramètre d'exercice secondaire PS qui peut être le capteur d'effort 83 ou le capteur de vitesse 84 ;
- un capteur physiologique 86 (illustré aux
figures 29 à 31 ) comme par exemple une sonde thermique, une sonde de mesure de l'activité électromyographique, du rythme respiratoire ou du rythme cardiaque etc. ; - un capteur d'environnement 87 comme par exemple un hygromètre, une sonde thermique, un manomètre etc.
- a sensor of the secondary exercise parameter P S which may be the
force sensor 83 or thespeed sensor 84; - a physiological sensor 86 (shown in FIGS.
Figures 29 to 31 ) such as a heat probe, a measurement probe for electromyographic activity, respiratory rate or heart rate etc. ; - an environmental sensor 87 such as a hygrometer, a thermal probe, a manometer, etc.
Bien entendu, ces ou ces troisièmes moyens de mesure sont reliés à l'unité centrale 80 pour réaliser l'étape d) de mesure.Of course, these or these third measurement means are connected to the
Le procédé conforme à l'invention comprend également les deux étapes suivantes :
- e) comparaison pendant l'exercice du au moins un paramètre de consigne PC avec au moins une valeur seuil prédéfinie, notamment du type valeur de seuil minimale ou valeur de seuil maximale, ladite comparaison pouvant notamment être effectuée sur une période de temps prédéterminée et/ou sur une portion prédéterminée du déplacement D du
bras 3 ; et - f) modification ou remplacement de la courbe de consigne CC si, lors de l'étape e), au moins un paramètre de consigne PC est supérieur ou inférieur à la valeur seuil correspondante, avant de reprendre les étapes b) à e) décrite ci-dessus avec la courbe de consigne CC telle que modifiée ou remplacée afin d'adapter l'exercice à l'utilisateur suivant un protocole d'exercice prédéfini en fonction de l'évolution du paramètre de consigne PC.
- e) comparison during the exercise of the at least one setpoint parameter P C with at least one predefined threshold value, in particular of the minimum threshold value or maximum threshold value type, said comparison being able to be performed in particular over a predetermined period of time and or on a predetermined portion of the displacement D of the
arm 3; and - f) modification or replacement of the setpoint curve C C if, during step e), at least one setpoint parameter P C is greater or less than the corresponding threshold value, before repeating steps b) to e) described above with the setpoint curve C C as modified or replaced in order to adapt the exercise to the user according to a predefined exercise protocol as a function of the evolution of the setpoint parameter P C.
Le principe de ces deux étapes e) et f) est de modifier le cours de l'exercice en fonction de l'évolution du paramètre de consigne PC choisi, ou en fonction de l'évolution de plusieurs paramètres de consigne PC choisis. Il est entendu par modifier le cours de l'exercice de réaliser l'une ou l'autre des fonctions suivantes :
- modifier la courbe de consigne CC qui sert de base à l'asservissement de l'étape c), la modification de la courbe de consigne CC consistant à modifier les paramètres qui définissent cette courbe, comme par exemple la pente de la courbe en certains endroits (début et/ou fin de déplacement du bras 3), la valeur en ordonnée du ou des paliers, la valeur en abscisses des points d'extrémité du ou des paliers etc. ;
- remplacer la courbe de consigne CC par une autre courbe de consigne, comme par exemple remplacer la courbe
C C1 parla courbe C C2.
- modify the setpoint curve C C which serves as a basis for the control of step c), the modification of the setpoint curve C C of modifying the parameters which define this curve, such as the slope of the curve in some places (beginning and / or end of movement of the arm 3), the value in ordinate of the bearing or bearings, the value in abscissa of the end points of the bearing or bearings etc. ;
- replace the setpoint curve C C by another setpoint curve, such as for example to replace the
curve C C 1 by thecurve C C 2.
Ces deux fonctions sont sensiblement équivalentes car remplacer la courbe Cc1 par la courbe CC2 revient d'une certaine façon à modifier la courbe CC1 pour qu'elle devienne la courbe CC2 ; et inversement modifier une courbe CC revient à la remplacer par une autre courbe différente.These two functions are substantially equivalent because replacing the curve Cc1 by the
Au final, il s'agit de modifier l'exercice pour adapter ce dernier à l'utilisateur. Par exemple, si l'utilisateur peine à suivre une courbe de consigne CC en effort et que la vitesse V de déplacement du bras 3 passe en-deçà d'une valeur seuil prédéfinie par le thérapeute, la courbe de consigne est modifiée ou remplacée pour que l'utilisateur est moins de difficulté pour réaliser l'exercice.In the end, it is a question of modifying the exercise to adapt it to the user. For example, if the user has trouble following a setpoint curve C C in effort and the speed V of movement of the
Différents paramètres de consignes PC peuvent être pris en compte avant et au cours de l'exécution du programme conforme à l'invention. Ces paramètres de consigne PC peuvent être de deux sortes :
- d'une part des paramètres internes à l'appareil (notamment la vitesse V, l'accélération, le déplacement D ou positionnement, l'effort F etc.) ; et
- d'autre part les paramètres externes reliées à l'unité centrale 80 qui vont apporter à cette dernière des informations sur l'environnement (paramètre d'environnement PE) et surtout sur l'utilisateur (paramètre physiologique PPHY). L'asservissement du moyen moteur 5 prend en considération une ou plusieurs de ces différentes paramètres de consigne Pc.
- on the one hand internal parameters to the device (in particular speed V, acceleration, displacement D or positioning, effort F etc.); and
- on the other hand the external parameters connected to the
central unit 80 which will provide the latter with information on the environment (environment parameter P E ) and especially on the user (physiological parameter P PHY ). The servocontrol of the motor means 5 takes into consideration one or more of these different setpoint parameters Pc.
Il est par exemple envisageable d'avoir une courbe de consigne CC de l'effort F en fonction du déplacement D du bras 3, le paramètre de consigne PC choisie étant la vitesse V de déplacement du bras 3 ; la vitesse étant une résultante de l'effort F et du déplacement D. Une telle programmation permettra de reproduire un exercice courant chez les kinésithérapeutes dans le cadre de rééducations conventionnelles, à savoir que l'utilisateur doit faire un effort auquel le thérapeute oppose une résistance progressive.For example, it is conceivable to have a setpoint curve C C of the force F as a function of the displacement D of the
Il est par exemple envisageable d'avoir une courbe de consigne CC de la vitesse V de déplacement du bras 3 en fonction du déplacement D du bras 3, le paramètre de consigne PC choisie étant l'effort F. Une telle programmation permettra de réaliser un travail en iso-cinétisme, c'est-à-dire à vitesse constante. Le travail en iso-cinétisme conduit généralement à des exercices où l'utilisateur effectue un travail exocentrique, c'est-à-dire qu'il fournit en fait le contre effort de résistance à une poussée ou une traction à vitesse contrôlée effectuée par bras 3. L'utilisateur se trouve donc en mode frein et le moyen moteur en mode moteur. Le travail exocentrique de frein est généralement utilisé dans les premières séances de rééducation et il l'est de façon majoritaire pour des exercices de maintien de la forme chez les seniors ; d'où l'intérêt de l'appareil conforme à l'invention.For example, it is conceivable to have a setpoint curve C C of the speed V of displacement of the
Le ou les capteurs physiologique 86, qui surveilleront notamment le rythme des pulsations cardiaques et la tension artérielle de l'utilisateur, sont principalement employés pour rajouter une surveillance de sécurité dans le cadre de personnes à risque ou affaiblies.The physiological sensor (s) 86, which will notably monitor the rhythm of the heartbeats and the blood pressure of the user, are mainly used to add safety monitoring in the context of at-risk or weakened persons.
Le ou les paramètres physiologiques PPHY recueillies pendant l'exercice sont ainsi exploitées en temps réel pour l'adaptation de l'exercice à l'utilisateur, c'est-à-dire que ces données peuvent, selon des programmes préétablis (définition de valeurs seuils et de période de temps prédéterminée et/ou de portion prédéterminée du déplacement D du bras 3) faire évoluer en temps réel le programme de rééducation ou d'entraînement.The physiological parameter (s) P PHY collected during the exercise are thus exploited in real time for the adaptation of the exercise to the user, that is to say that these data can, according to pre-established programs (definition of threshold values and predetermined time period and / or predetermined portion of the displacement D of the arm 3) to change in real time the rehabilitation program or training.
En outre, ces données physiologiques peuvent également être restituées en temps réel à l'utilisateur, et éventuellement à un thérapeute ou entraîneur sportif, ou encore enregistrées pour une restitution ultérieure à ces mêmes personnes. Ces données pourront alors servir pour apporter des adaptations aux programmes d'exercices successifs au sein d'une même séance ou pour les séances suivantes. L'appareil 1 est donc du type adaptatif car il peut potentiellement s'adapter aux caractéristiques physiques et pathologiques de l'utilisateur avant la séance, offrir des programmes ou l'exercice sera dépendant en temps réel de l'attitude du sujet, et offrir des propositions d'évolution des protocoles initiaux.In addition, these physiological data can also be returned in real time to the user, and possibly to a therapist or sports trainer, or recorded for later return to these same people. This data can then be used to make adjustments to successive exercise programs within the same session or for subsequent sessions. The
Il est possible que le procédé comprennent aussi une étape de réception d'au moins une consigne émise par l'utilisateur ou une tierce personne, comme un thérapeute ou un entraîneur sportif, et une étape de modification ou de changement de la courbe de consigne CC en fonction de ladite instruction. Pour réaliser cette étape, l'appareil 1 comprend un moyen de réception 97 d'une instruction relié à l'unité centrale 80 et adapté pour réaliser l'étape de réception décrite ci-dessus, l'unité centrale 80 étant bien entendu adapté pour réaliser l'étape de modification ou de changement de la courbe de consigne CC en fonction de ladite instruction.It is possible that the method also comprises a step of receiving at least one instruction issued by the user or a third person, such as a therapist or a sports trainer, and a step of modifying or changing the setpoint curve C C according to said instruction. To carry out this step, the
Ainsi, il est possible de modifier l'exercice en cours de route sur instruction de l'utilisateur, du thérapeute ou de l'entraîneur sportif ; la modification de l'exercice correspondant au même type de modification que celle décrite ci-dessous pour l'étape f) du procédé. Par exemple, l'utilisateur peut souhaiter durcir l'exercice, en augmentant l'effort, s'il se sent en forme. En outre, l'utilisateur peut adapter l'exercice de façon volontaire au sein même d'un mouvement unitaire pour notamment accélérer, augmenter la force, rajouter des itérations ou du temps ou allonger un déplacement et avoir la modification prise en compte en temps réel.Thus, it is possible to modify the exercise en route on instruction of the user, the therapist or the sports trainer; modifying the exercise corresponding to the same type of modification as that described below for step f) of the method. For example, the user may wish to harden the exercise, increasing the effort, if he feels fit. In addition, the user can adapt the exercise voluntarily within a unitary movement to accelerate, increase the force, add iterations or time or lengthen a displacement and have the modification taken into account in real time .
Il est également avantageux que le procédé comprenne une étape d'affichage de l'évolution du paramètre principal d'exercice PP et/ou d'au moins un paramètre de consigne PC pendant l'exercice afin d'informer l'utilisateur et/ou une tierce personne de l'évolution de ce ou ces paramètres caractéristiques de l'exercice effectué par l'utilisateur. Pour réaliser cette étape, l'appareil 1 comprend un moyen d'affichage 88 relié à l'unité centrale pour afficher l'évolution du ou des paramètres PP et/ou PC pendant l'exercice.It is also advantageous if the method comprises a step of displaying the evolution of the main exercise parameter P P and / or at least a setpoint parameter P C during the exercise to inform the user and / or a third person of the evolution of this or these parameters characteristic of the exercise performed by the user. To carry out this step, the
Le moyen d'affichage 88 peut être réalisé sous la forme d'un écran ou d'un moniteur ou d'un ensemble de diodes lumineuses disposés sur le corps 2 de l'appareil 1 ou hors du corps 2.The display means 88 may be in the form of a screen or a monitor or a set of light-emitting diodes arranged on the
L'intérêt est de montrer en temps réel comment l'utilisateur se comporte sur l'exercice programmé, afin que l'utilisateur puisse modifier son comportement en temps réel ou afin qu'un thérapeute ou un entraîneur sportif puisse envoyer une consigne à l'unité centrale 80 pour modifier en temps réel l'exercice ; le but étant encore une fois d'adapter l'exercice à l'utilisateur.The interest is to show in real time how the user behaves on the programmed exercise, so that the user can modify his behavior in real time or so that a therapist or a sports coach can send an instruction to the
Il est aussi avantageux que le procédé comprenne une étape de transmission de données traduisant l'évolution du paramètre principal d'exercice PP et/ou d'au moins un paramètre de consigne PC pendant l'exercice à destination d'un terminal externe, notamment du type terminal téléphonique et/ou informatique, afin d'informer une tierce personne située à distance de l'utilisateur de l'évolution de ce ou ces paramètres. Pour réaliser cette étape, l'appareil 1 comprend un moyen de transmission 89 relié à l'unité centrale 80 et adapté pour réaliser cette étape de transmission. Le moyen de transmission 89 peut être du type transmission filaire ou transmission sans fil.It is also advantageous for the method to comprise a data transmission step reflecting the change in the main exercise parameter P P and / or at least one setpoint parameter P C during the exercise to an external terminal. , in particular of the telephone and / or computer terminal type, in order to inform a third party located at a distance from the user of the evolution of this or these parameters. To achieve this step, the
L'intérêt est de permettre à une personne distante de suivre l'exercice de l'utilisateur, par exemple via un réseau informatique (internet, intranet ou équivalent) ; cette personne pouvant ensuite, en fonction de l'évolution du ou des paramètres transmis, envoyer une consigne à l'unité centrale 80 pour modifier en temps réel l'exercice. De plus, les données transmises pourront être stockées (par exemple sur un terminal informatique externe voire sur le moyen de stockage 81) pour une analyse ultérieure, afin notamment d'établir des comparaisons entre les différentes séances d'exercice, modifier les exercices ultérieures et établir des diagnostics.The interest is to allow a remote person to follow the exercise of the user, for example via a computer network (internet, intranet or equivalent); this person can then, depending on the evolution of the transmitted parameter or parameters, send a setpoint to the
La
En outre, le procédé peut comprendre une étape de guidage de l'utilisateur consistant à générer un signal de consigne, notamment du type signal visuel, sonore ou tactile, à destination de l'utilisateur afin de guider l'utilisateur dans son exercice notamment en terme de :
- effort ou vitesse à développer pour déplacer le
bras 3 ou freiner le déplacement dubras 3 ; - temps ou nombre de cycle restant pour l'exercice ou pour la phase de l'exercice correspondant.
- effort or speed to develop to move the
arm 3 or to slow the movement of thearm 3; - time or number of cycles remaining for the exercise or for the corresponding exercise phase.
Pour réaliser cette étape, l'appareil 1 comprend un moyen de guidage 90 de l'utilisateur dans son exercice, ledit moyen de guidage 90 relié à l'unité centrale 80 et adapté pour générer le signal de guidage défini ci-dessus. Ce moyen de guidage 90 peut être réalisé sous la forme de :
- un générateur de signal sonore, tel qu'un générateur de son (la fréquence et/ou l'intensité du signal sonore étant associées à une recommandation particulière à destination de l'utilisateur) ou un générateur de phrase vocale émettant des recommandations parlées (comme par exemple des recommandations du type « poussez plus fort », « tirez moins fort », etc.) ;
- un générateur de signal visuel apte à émettre plusieurs signaux lumineux distincts, chaque signal lumineux étant associé à une recommandation particulière à destination de l'utilisateur, comme par exemple un générateur de signaux colorés (la couleur étant associée à une recommandation), un générateur de signaux clignotants (la fréquence du signal étant associée à une recommandation), un générateur de phrase écrite (le contenu de la phrase étant associé à une recommandation) ;
- un générateur de signal tactile, comme par exemple un générateur de vibration disposé sur ou dans le moyen de
liaison 4, tel qu'un vibrateur dans une poignée 4.
- a sound signal generator, such as a sound generator (the frequency and / or intensity of the sound signal being associated with a particular recommendation to the user) or a voice phrase generator issuing spoken recommendations (such as for example, "push harder", "pull harder", etc.) recommendations;
- a visual signal generator capable of emitting several distinct light signals, each light signal being associated with a particular recommendation intended for the user, such as for example a colored signal generator (the color being associated with a recommendation), a signal generator; flashing signals (the signal frequency being associated with a recommendation), a written sentence generator (the content of the sentence being associated with a recommendation);
- a tactile signal generator, such as for example a vibration generator disposed on or in the connecting
means 4, such as a vibrator in ahandle 4.
Avec cet appareil 1, il est possible d'effectuer un suivi de l'exercice à distance, comme par exemple pour réaliser des séances de rééducation ou de coaching sportif à distance. Ainsi, les exercices peuvent être fait dans un local spécialisé (cabinet de kinésithérapeute, institut, salle de musculation, club de fitness, etc..) ou à domicile. Les programmes ou protocoles d'exercice peuvent être téléchargeables à distance via le réseau intemet. Toutes les données relatives à l'exécution et au résultat d'un exercice sont également téléchargeables à distance via internet. L'équipement physique, les modes de conversation et le site forment un ensemble applicatif qui permet d'avoir son protocole d'exercice personnel réalisé par un professionnel à partir des données notamment pathologique, physiologique ou physique.With this
Les données des exercices réalisés en temps réel et transmises via le moyen de transmission 89, permettent d'avoir une réelle interaction entre l'utilisateur et la tierce personne professionnelle pendant l'exercice. Le couplage avec une caméra en ligne (notamment du type webcam) permet au professionnel d'indiquer à l'utilisateur des corrections de postures et de mouvements. Les données relatives à l'exercice réalisé peuvent ensuite être téléchargées par le professionnel en fin d'exercice, permettant à ce dernier d'adapter le protocole d'exercice entre chaque séance.The data of the exercises performed in real time and transmitted via the means of
L'utilisateur, l'entraîneur sportif ou le thérapeute ont la possibilité de s'inscrire sur un site internet et de télécharger en ligne des courbes de consigne CC et des programmes ou protocoles d'exercice en fonction des objectifs visés à des fins thérapeutiques, de développement musculaire, d'entretien physique ou encore de perte de poids. Ces personnes peuvent également télécharger les résultats de l'utilisateur (évolution des courbes réelles) en temps réel ou après l'exercice, à des fins notamment de comparaison de ces résultats avec des données théoriques, des moyennes, des résultats obtenus sur des exercices précédents, ou encore des résultats d'un autre utilisateur. Il est également envisageable que les personnes inscrites sur ce site internet créent de nouvelles courbes, de nouveaux programmes ou protocoles d'exercice et les mettent à disposition des autres personnes inscrites sur le site internet en question.The user, the sports trainer or the therapist have the possibility to register on a website and to download online C C setpoint curves and exercise programs or protocols according to the desired objectives for therapeutic purposes. , muscle development, physical maintenance or weight loss. These people can also download the results of the user (evolution of the real curves) in real time or after the exercise, in particular for the purpose of comparing these results with theoretical data, averages, results obtained on previous exercises , or the results of another user. It is also possible that people registered on this website create new curves, new programs or exercise protocols and make them available to other people registered on the website in question.
La
Le protocole d'exercice définit plusieurs phases d'exercice successives :
- une phase dite d'initialisation PHINI, en début d'exercice, au cours de laquelle :
- l'utilisateur effectue l'exercice avec une courbe de consigne CC0, cette courbe de consigne CC0 étant notamment choisie pour tester ou échauffer l'utilisateur (comme par exemple la courbe CC0 en effort illustrée correspondant à une courbe avec un effort F0 constant en fonction du déplacement D) ; et
- une condition relative à l'état physiologique est nécessaire pour passer à la phase suivante, par comparaison entre un paramètre physiologique PPHY et une valeur seuil maximale ou minimale (comme par exemple le rythme cardiaque de l'utilisateur qui est comparé à une valeur seuil maximale, par exemple une valeur de 120 pulsations par seconde, de sorte que l'on passe à la phase suivante si le rythme cardiaque est inférieur à la valeur seuil maximale ; autrement dit, tant que le rythme cardiaque est supérieure à la valeur seuil maximale l'utilisateur continue son exercice sur la courbe de consigne CC0 et ne passe pas à la phase suivante) ;
- une phase d'exercice PHEX proprement dite, qui suit la phase d'initialisation PHINI à condition que la condition physiologique soit remplie (par exemple le rythme cardiaque passe en-dessous de la valeur seuil maximale).
- a phase called initialization PHINI, at the beginning of the year, during which:
- the user performs the exercise with a setpoint curve C C 0, this setpoint curve CC0 being chosen in particular to test or warming the user (as for example the curve C C 0 in illustrated effort corresponding to a curve with a constant force F 0 as a function of the displacement D); and
- a condition relating to the physiological state is necessary to proceed to the next phase, by comparison between a physiological parameter P PHY and a maximum or minimum threshold value (such as, for example, the user's heart rate which is compared with a threshold value maximum, for example a value of 120 beats per second, so that the next phase is passed if the heart rate is below the maximum threshold value, that is, as long as the heart rate is above the maximum threshold value the user continues his exercise on the setpoint curve C C 0 and does not proceed to the next phase);
- a PHEX exercise phase proper, which follows the PHINI initialization phase provided that the physiological condition is met (for example, the heart rate falls below the maximum threshold value).
La phase d'exercice PHEX peut se décomposer en deux phases d'exercice successives :
- une première phase au cours de laquelle l'utilisateur effectue l'exercice avec une première courbe de consigne CC10 (comme par exemple la courbe CC10 en effort illustrée) ; suivie de
- une deuxième phase au cours de laquelle l'utilisateur effectue l'exercice avec une deuxième courbe de consigne
C C20 différente de la première courbe de consigne CC10 (comme par exemplela courbe C C20 en effort illustrée) si lacondition 2 est remplie.
- a first phase during which the user performs the exercise with a first setpoint curve C C 10 (as for example the curve C C 10 in illustrated effort); followed by
- a second phase during which the user performs the exercise with a second setpoint curve C C different from the first setpoint curve C C 10 (as for example the
C C 20 curve in illustrated effort) if thecondition 2 is fulfilled.
Ainsi, on passe de la première à la deuxième phase à condition que la condition 2 soit remplie, cette condition se rapportant à un paramètre de consigne comme décrit ci-dessus. Par exemple, cette condition 2 peut consister à comparer la vitesse V de déplacement du bras 3 avec une valeur seuil minimale, par exemple la vitesse V jusqu'au point E1 de la première courbe de consigne CC10 illustrée ; la première courbe de consigne CC10 étant définie par les coordonnées (en force F et en déplacement D) de trois points E1, E2 et E3. Ainsi, on passe à la deuxième phase si la vitesse V est supérieure à la valeur seuil minimale ; autrement dit, tant que la vitesse V est inférieure à la valeur seuil minimale l'utilisateur continue son exercice sur la première courbe de consigne CC10 et ne passe pas à la deuxième phase.Thus, one goes from the first to the second phase provided that the
Une fois dans la deuxième phase, l'utilisateur effectue par exemple l'exercice sur un certain nombre de cycle de déplacement (aller et retour) du bras 3 avant la fin de l'entraînement.Once in the second phase, the user performs for example the exercise on a number of movement cycle (round trip) of the
Cependant, au cours de la première phase, le nombre de cycle de déplacement est également compté de sorte que, si la condition 2 n'est jamais remplie, l'utilisateur accède à la fin de l'entraînement lorsqu'il a effectué un nombre prédéterminé de cycle de déplacement du bras 3. Cette condition correspond à la condition 1 de la
En parallèle des conditions 1 et 2, il est envisageable d'effectuer une ou plusieurs mesures sur les courbes réelles afin de vérifier si l'utilisateur est bien capable de suivre la première courbe de consigne CC10. On estime que l'utilisateur ne suit pas l'exercice si la condition 3 est remplie, et dans ce cas on informe l'utilisateur de cette situation via les moyens décrits ci-dessus. Par exemple, cette condition 3 peut consister à comparer l'effort réel au point E2 avec une valeur seuil maximale. Ainsi, on informe l'utilisateur si cet effort est inférieur à la valeur seuil maximale ; autrement dit, tant que l'effort est supérieur à la valeur seuil maximale l'utilisateur continue son exercice normalement.In parallel with the
Lors d'un entraînement, une première série de tests ont lieu en temps réel durant un cycle. L'unité centrale contrôle d'abord que le moyen moteur respecte la courbe de consigne enregistrée, et surveille par ailleurs également les paramètres physiologiques qui peuvent dans les cas critiques modifier le cycle prévu ; un cycle correspondant à une séquence d'aller et retour du bras 3, un exercice correspondant à une suite de même cycles, et un entraînement correspondant à un ensemble d'exercices identiques ou différents. A la fin d'un cycle, les mêmes tests sont réalisés.During a training, a first series of tests take place in real time during a cycle. The central unit first checks that the motor means respects the stored setpoint curve, and also monitors the physiological parameters that can in critical cases modify the planned cycle; a cycle corresponding to a round-trip sequence of the
En référence à la
- recommencer le même cycle (chemin n°1);
- modification des paramètres du cycle en cours (chemin n°2), correspondant à un remplacement ou une modification de la courbe de consigne ;
- passage à un autre exercice (chemin n°3) ;
- fin de l'entraînement (chemin n°4).
- repeat the same cycle (path # 1);
- modification of the parameters of the current cycle (path No. 2), corresponding to a replacement or modification of the setpoint curve;
- move to another exercise (path # 3);
- end of training (path # 4).
Donc, à chaque instant t et à chaque fin de cycle, un ensemble de tests sont effectués et le résultat de ces tests indique le chemin suivant à effectuer.Therefore, at each moment t and at the end of each cycle, a set of tests are performed and the result of these tests indicates the next path to be performed.
La
Dans une réalisation particulièrement intéressante dite réalisation « multiaxe », le procédé comprend une étape de localisation du bras 3 dans l'espace, et une étape de pilotage de la position du bras 3 dans l'espace afin de contraindre l'utilisateur à suivre, avec le bras 3, une trajectoire délimitée dans l'espace durant l'exercice.In a particularly interesting embodiment called "multiaxis" embodiment, the method comprises a step of locating the
Une telle réalisation est envisageable avec l'appareil 1 comportant le moyen de coopération 7 tel que décrit ci-avant dans la deuxième partie de la description, autrement dit le moyen de coopération 7 pourvu de moyens moteur secondaires 70 permettant de contraindre l'utilisateur à suivre une trajectoire délimitée dans l'espace.Such an embodiment can be envisaged with the
L'étape de localisation du bras 3 dans l'espace est réalisé grâce aux capteurs d'angle équipant chacun des moyens moteur secondaires 70 et grâce au capteur de déplacement 85 mesurant le déplacement D du bras 3 ; les informations issues de ces capteurs renseignant sur la position de l'extrémité libre du bras 3 en liaison avec l'utilisateur, et donc sur la trajectoire suivie par cette extrémité libre du bras 3 et donc suivie par l'utilisateur.The step of locating the
Les
Dans cette réalisation « multiaxe », l'unité centrale 80 commande le moyen moteur 5 et les moyens moteur secondaires 70 pour éventuellement asservir la trajectoire du bras 3 autour d'une trajectoire T prédéfinie, avantageusement mémorisée dans le moyen de stockage 81. Pour cela l'unité centrale 80 calcule en temps réel la trajectoire du bras 3 (grâce aux capteurs mentionnés ci-dessus) et asservie les différents moyens moteurs 5, 70 pour contraindre l'utilisateur U à suivre la trajectoire T.In this "multiaxis" embodiment, the
Durant l'exercice, l'appareil 1 continue à imposer un asservissement autour de la courbe de consigne Cc visible en
Comme visible en
La trajectoire T dépend dépend de l'exercice choisi et plus particulièrement de :
- la pathologie à traiter ; et/ou
- des muscles ou chaînes musculaires que l'on souhaite faire travailler ou au contraire que l'on ne souhaite pas faire travailler ; et/ou
- des articluations que l'on souhaite faire travailler ou au contraire que l'on ne souhaite pas faire travailler
- the pathology to be treated; and or
- muscles or muscle chains that you want to work or on the contrary that you do not want to work; and or
- articulations that we want to work or on the contrary that we do not want to work
Au cours du déplacement du bras 3 le long de la trajectoire T, l'effort, le contre-effort ou la vitesse seront par exemple imposés par le moyen moteur 5 selon la courbe de consigne CC préprogrammée.During the movement of the
Comme visible en
Par contre, et comme illustré en
Une couronne CR peut être établie autour du couloir de travail CT, le contre-effort CE radial forcera l'utilisateur U à rester dans le couloir CT prévu par l'exercice tant que l'utilisateur U ne rentre pas à l'intérieur de la couronne CR. Si l'utilisateur U persiste à s'éloigner de la trajectoire T, à sortir du couloir de travail CT et à aller à l'intérieur de la couronne CR, le contre-effort CE augmente jusqu'à atteindre une valeur maximale CEmax prédéterminée aux limites de la couronne CR. L'augmentation du contre-effort CE dans la couronne CR pourra être progressif ou discontinue jusqu'aux limites de la couronne CR.A crown CR can be established around the working corridor CT, the radial counter-force EC will force the user U to remain in the corridor CT planned by the exercise as the user U does not return inside the crown CR. If the user U continues to move away from the trajectory T, to leave the working corridor CT and to go inside the crown CR, the counter-force CE increases until reaching a maximum value CEmax predetermined to limits of the crown CR. The increase of the CE counterforce in the crown CR may be progressive or discontinuous up to the limits of the CR crown.
La troisième partie relative à l'utilisation de l'appareil conforme à l'invention est faite ci-dessous.The third part relating to the use of the apparatus according to the invention is made below.
Les
De manière générale, l'appareil 1 servira dans la rééducation ou la remise en forme de la majorité des muscles de l'utilisateur. Pour ce faire, l'utilisateur et l'appareil 1 seront positionnés suivant une multitude de combinaisons. L'utilisateur pourra se trouver ou bien en posture couché, assis ou debout, et l'appareil 1 pourra être positionné de façon horizontale ou verticale ou de façon intermédiaire inclinée.In general, the
Sur les
Sur la
Sur la
Sur les
Sur la
Sur les
Avec un tel appareil 1, on note que :
- la tierce personne TP peut avoir accès à l'utilisateur U sur quasiment 360 degrés, c'est-à-dire qu'elle peut tourner tout autour de l'utilisateur U, notamment pour analyser sa posture et éventuellement corriger sa posture avant ou pendant l'exercice avec l'appareil 1 ;
- la tierce personne TP peut agir directement, avec ses deux mains libres, sur l'utilisateur U pour notamment corriger des déséquilibres, éliminer ou modifier des mouvements parasites, guider l'utilisateur U dans son mouvement (que ce soit en terme de trajectoire, d'effort, de vitesse, etc.), soutenir ou maintenir physiquement le membre en exercice.
- the third party TP may have access to the user U on almost 360 degrees, that is to say that it can rotate around the user U, in particular to analyze his posture and possibly correct his posture before or during exercise with the
device 1; - the third person TP can act directly, with both hands free, on the user U to correct particular imbalances, eliminate or modify parasitic movements, guide the user U in its movement (whether in terms of trajectory, d effort, speed, etc.), physically support or maintain the practicing member.
Cet appareil 1 permet par exemple d'effectuer des mouvements excentriques et concentriques, suivant la chaîne de muscle considérée.This
En outre, cet appareil 1 présente l'avantage d'être transportable ou portatif, peu volumineux ou peu encombrant, de sorte qu'un utilisateur peut se déplacer avec facilement, et surtout un thérapeute ou un entraîneur sportif peut se rendre avec l'appareil chez un patient ou client.In addition, this
Bien entendu l'exemple de mise en oeuvre évoqué ci-dessus ne présente aucun caractère limitatif et d'autres détails et améliorations peuvent être apportés à l'appareil selon l'invention telle que décrite dans les revendications, sans pour autant sortir du cadre de l'invention où d'autres formes de moyen moteur et/ou de moyen moteur secondaire et/ou de moyen d'articulation et/ou d'organe mobile peuvent par exemple être réalisées.Of course the implementation example mentioned above is not limiting in nature and further details and improvements can be made to the apparatus according to the invention as described in the claims, without departing from the scope of the present invention. the invention where other forms of motor means and / or secondary motor means and / or hinge means and / or movable member may for example be made.
Claims (15)
- An apparatus (1) for muscle and/or joint exercise, adapted to reeducation and/or physical conditioning of a body part, notably an upper and/or lower limb, of a user, said apparatus (1) comprising:- a hollow body (2), open at one of its ends (20) and having a bottom (21) at the end opposite to the open end (20);- a mobile member (3) translatable inside the body (2) along a main axis (A) and designed to be displaced by the body part of the user and also for displacing said body part;- a motor-driven means (5) connected to the mobile member (3) and adapted for driving in displacement the mobile member (3) in both translatory directions, and also for decelerating the displacement of the mobile member (3) in both translatory directions;- a cooperating means (6) between the body (2) and a frame (B), this cooperating means (6) comprising:- at least one hinge (60) of the body (2) on the frame (B), said hinge (60) providing at least one degree of rotational freedom for the body (2) around an axis of rotation; and- a removable means (63) for installing and removing the body (2), said removable means (63) being designed for removably installing said body (2) on a base (S) slidingly mounted in the frame (B).
- The apparatus (1) according to claim 1, wherein the hinge (60) is designed for providing two degrees of rotational freedom around respectively two axes of rotation, notably perpendicular to each other.
- The apparatus according to claim 2, wherein the hinge (60) comprises a first pivot link (61) along the main axis (A) connected to a second pivot link (62) along a transverse axis perpendicular to the main axis (A).
- The apparatus (1) according to any of the preceding claims, wherein the or each hinge (60) further comprises at least one adjustable stop limiting the rotation of the body around at least one axis of rotation, so that said stop allows to define an angular range adjustable for the rotation of said body around the corresponding axis of rotation.
- The apparatus (1) according to any of the preceding claims, wherein the body supports at least one secondary motor-driven means (70) capable of rotationally driving the body (2) around an axis of rotation (B1; B2), said secondary motor-driven means (70) comprising at least one angle sensor around the axis of rotation thereof.
- The apparatus according to any of the preceding claims, wherein the motor-driven means (5) comprises:- a motor (50) provided for four-quadrant operation;- a reversible supply (52) of the motor; and- reversible means for converting (51) the output movement of the motor (50) into a translatory displacement of the mobile member (3).
- The apparatus according to any of the preceding claims, wherein on the inside, the body (2) supports guiding means (27, 28; 23) of the mobile member (3) in order to sustain the radial efforts perpendicular to the main axis (A) and guide said mobile member (3) in the translatory movement thereof.
- The apparatus according to claim 7, wherein the guiding means comprise:- several tie bars (27), preferably three tie bars, extending inside the body (2) in parallel to the main axis (A); and- at least one slide (28) slidingly mounted on each of said tie bars (27) and fixedly mounted on the mobile member (3).
- The apparatus according to claim 8, wherein the motor-driven means comprises a rotary motor (50), a threaded shaft (514) rotatingly driven by the motor (50) and a nut part (516) provided with a threaded orifice cooperating with the threaded shaft (514), and wherein the nut part (516) is integral with the slide (28).
- A muscle and/or joint exercise device adapted for reeducation and/or physical conditioning of a body part, notably an upper and/or lower limb, of a user, said device comprising:- an exercise apparatus (1) according to any of the preceding claims; and- a frame (B) in which a base (S) is slidingly mounted;wherein the body (2) is removably mounted on said base (S), via the removable means (63), so as to allow for the position of the apparatus (1) to be adjusted by adjusting the position of the base (S) on the frame (B).
- A method for using an exercise apparatus (1) according to any of claims 1 to 9, comprising the following steps:- removably mounting the body (2) of the apparatus (1) on a base (S) slidingly mounted in a frame (B);- adjusting the position of the apparatus (1) by adjusting the position of the base (S) on the frame (B).
- The method according to claim 11, further comprising a control method of the apparatus (1) comprising the following steps:a) recording or inputting at least one set-point curve (CC) corresponding to a predefined variation of a main exercise parameter (PP) predetermined depending on a status parameter (PE) such as time or the displacement (D) of the mobile member (3), said main exercise parameter (PP) representing the effort of displacement imposed by the mobile member (3) on said body part or vice versa, and notably selected from the force (F) produced by the user on the mobile member (3) for displacing or decelerating the mobile member (3), the torque or force produced by the motor-driven means (5) for displacing or decelerating the mobile member (3), the speed (V) of displacement of the mobile member (3) and the acceleration of the displacement of the mobile member (3);b) acquiring an actual curve corresponding to the variation of the main exercise parameter (PP) measured during the exercise depending on the status parameter (PE);c) controlling the motor-driven means (5) so as to regulate the actual curve around the set-point curve (CC) during the exercise.
- The method according to claim 12, wherein the control method further comprises the following steps:d) during the exercise, measuring at least one set-point parameter (PC) selected from:- a secondary exercise parameter (PS) distinct from the main exercise parameter (PP), said secondary exercise parameter (PS) representing the effort of displacement imposed by the mobile member (3) on said body part or vice versa, and notably selected from the force (F) produced by the user on the mobile member (3) for displacing or decelerating the mobile member, the torque or force produced by the motor-driven means (5) for displacing or decelerating the mobile member (3), the speed (V) of displacement of the mobile member (3), and the acceleration of the displacement of the mobile member (3); and/or- a physiological parameter (PPHY) representing the physiological state of the subject, and notably selected from electromyographic activity, respiration rate, heart rate, the user's temperature, blood oxygen level, blood pressure, and perspiration; and/or- a duration parameter representing the duration of the exercise, and notably selected from the duration of the exercise, the number of displacement cycles carried out by the mobile member (3), the time required for the user to carry out one or several predetermined displacements of the mobile member (3); and/or- an environmental parameter (PE) representing the external environment in which the user is carrying out the exercise, and notably selected from external ambient temperature, external level of humidity, external ambient pressure;e) during the exercise, comparing the at least one set-point parameter (PC) with at least one predefined threshold value, notably of the minimum threshold value or maximum threshold value type, wherein said comparison can notably be carried out for a predetermined period of time and/or a predetermined portion of the displacement of the mobile member (3);f) modifying or replacing the set-point curve if, in step e), at least one set-point parameter is greater or smaller than the corresponding threshold value, before resuming steps b) to e) with the set-point curve as modified or replaced so as to adapt the exercise to the user according to an exercise protocol predefined depending on the progress of at least one set-point parameter (PC).
- The method according to claims 12 or 13, wherein the control method comprises a step of receiving at least one order issued by the user or a third party, and a step of modifying or changing the set-point curve (CC) depending on said order so as to modify the current exercise or replace the current exercise with another exercise.
- The method according to any of claims 12 to 14, wherein the control method comprises a step of locating the mobile member (3) in space, and a step of steering the position of the mobile member (3) in space so as to oblige the user to follow, with the mobile member (3), a delimited path in space during the exercise.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR0858483A FR2939687B1 (en) | 2008-12-11 | 2008-12-11 | METHOD FOR CONTROLLING MUSCLE EXERCISE APPARATUS AND / OR ARTICULAR EXERCISE APPARATUS |
| PCT/FR2009/052489 WO2010067034A2 (en) | 2008-12-11 | 2009-12-11 | Muscle and/or joint exercise apparatus |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2370184A2 EP2370184A2 (en) | 2011-10-05 |
| EP2370184B1 true EP2370184B1 (en) | 2013-05-29 |
Family
ID=41061213
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP09802163.7A Active EP2370184B1 (en) | 2008-12-11 | 2009-12-11 | Muscle and/or joint exercise apparatus |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9005145B2 (en) |
| EP (1) | EP2370184B1 (en) |
| CA (1) | CA2746440A1 (en) |
| FR (1) | FR2939687B1 (en) |
| WO (1) | WO2010067034A2 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111726793A (en) * | 2020-06-17 | 2020-09-29 | 翱捷科技(上海)有限公司 | Timing deviation compensation method and device and electronic equipment |
Families Citing this family (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8560365B2 (en) | 2010-06-08 | 2013-10-15 | International Business Machines Corporation | Probabilistic optimization of resource discovery, reservation and assignment |
| US9646271B2 (en) | 2010-08-06 | 2017-05-09 | International Business Machines Corporation | Generating candidate inclusion/exclusion cohorts for a multiply constrained group |
| US8968197B2 (en) * | 2010-09-03 | 2015-03-03 | International Business Machines Corporation | Directing a user to a medical resource |
| US9292577B2 (en) | 2010-09-17 | 2016-03-22 | International Business Machines Corporation | User accessibility to data analytics |
| JP5785716B2 (en) * | 2011-01-13 | 2015-09-30 | クラブコング株式会社 | Training apparatus and training method |
| ES2423532B1 (en) * | 2012-02-20 | 2014-07-30 | Ivolution R&D, S.L. | ELECTRO-MECHANICAL PLATFORM FOR ADMINISTRATION, CONTROL, MONITORING AND EVALUATION FOR THE ADMINISTRATION AND CONTROL OF NEUROMUSCULAR STIMULUS, MOBILITY, FLEXIBILITY, DISTURBATION MOTOR AND TRACTIONS |
| JP5912722B2 (en) * | 2012-03-22 | 2016-04-27 | 美津濃株式会社 | Baseball or softball bat and method for manufacturing baseball or softball bat |
| WO2013148941A1 (en) | 2012-03-28 | 2013-10-03 | Pioneer Advanced Solutions, Inc. | System and method for generating and using customized athletic workouts |
| US9339692B2 (en) | 2013-05-20 | 2016-05-17 | Rami Hashish | Exercise system for shifting an optimum length of peak muscle tension |
| DE102013223603A1 (en) * | 2013-11-19 | 2015-05-21 | Ferrobotics Compliant Robot Technology Gmbh | robot arm |
| US10130842B2 (en) * | 2014-05-21 | 2018-11-20 | IncludeFitness, Inc. | Fitness systems and methods thereof |
| US9856037B2 (en) * | 2014-06-18 | 2018-01-02 | The Boeing Company | Stabilization of an end of an extended-reach apparatus in a limited-access space |
| US20160059077A1 (en) * | 2014-08-27 | 2016-03-03 | University Of Utah Research Foundation | Exercise therapy and rehabilitation system and method |
| EP3334502A4 (en) * | 2015-08-10 | 2019-01-23 | Hall, Marlene | Exercise system and method |
| US20170142501A1 (en) * | 2015-11-16 | 2017-05-18 | Qualcomm Incorporated | Internet of shoes |
| US11266867B2 (en) * | 2016-03-31 | 2022-03-08 | Inventus Engineering Gmbh | Training equipment and method |
| FR3050383A1 (en) | 2016-04-22 | 2017-10-27 | Aubert Bruno Jean Marie | INTERACTIVE, AUTONOMOUS AND PORTABLE SPORTING FUNCTIONAL REALIZATION OR FUNCTIONAL REEDUCATION METHOD AND DEVICES THEREFOR |
| US10384092B1 (en) * | 2016-05-07 | 2019-08-20 | Gregory Karapetian | Isometric exercise device |
| KR101881028B1 (en) * | 2016-11-21 | 2018-08-17 | 홍대건 | Apparatus and method for recognizing type of exercise |
| IL255036B (en) * | 2017-10-15 | 2020-07-30 | Luzzatto Yuval | Method and apparatus for an environment activity generator |
| US11612778B2 (en) * | 2021-03-23 | 2023-03-28 | Joseph Liberatore | Pneumatic exercise apparatus |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2619723B1 (en) | 1987-08-31 | 1990-01-19 | Angelloz Louis | MULTIPLE MODEL PHYSICAL EXERCISE APPARATUS AND METHOD FOR CONTROLLING SUCH APPARATUS |
| US20030028130A1 (en) * | 2001-08-04 | 2003-02-06 | Craig Wunderly | Machine for upper limb physical therapy |
| WO2004096501A2 (en) * | 2003-04-30 | 2004-11-11 | Nini Bluman | Method and system for motion improvement |
| WO2005074373A2 (en) * | 2004-02-05 | 2005-08-18 | Motorika Inc. | Methods and apparatus for rehabilitation and training |
| FR2875140B1 (en) | 2004-07-02 | 2009-06-26 | Univ Reims Champagne Ardenne | METHOD AND SYSTEM FOR TRAINING AND CUSTOMIZABLE REHABILITATION FOR IMPROVING SPORTS GESTURES USING A CINEMATIC KNEE MODEL |
| US8257284B2 (en) * | 2005-09-21 | 2012-09-04 | Wisconsin Alumni Research Foundation | Training device for muscle activation patterns |
| US20070202992A1 (en) * | 2006-02-28 | 2007-08-30 | Eric Grasshoff | Programmable adaptable resistance exercise system and method |
| US20070232467A1 (en) * | 2006-03-31 | 2007-10-04 | Michael Roydon Puzey | Reciprocable load resisting device |
| KR101160396B1 (en) * | 2007-04-25 | 2012-06-26 | 파나소닉 주식회사 | Exercise assist device |
| TWI348663B (en) * | 2007-11-02 | 2011-09-11 | Ind Tech Res Inst | Force feedback and interactive system |
-
2008
- 2008-12-11 FR FR0858483A patent/FR2939687B1/en not_active Expired - Fee Related
-
2009
- 2009-12-11 WO PCT/FR2009/052489 patent/WO2010067034A2/en active Application Filing
- 2009-12-11 US US13/132,668 patent/US9005145B2/en active Active
- 2009-12-11 EP EP09802163.7A patent/EP2370184B1/en active Active
- 2009-12-11 CA CA2746440A patent/CA2746440A1/en not_active Abandoned
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111726793A (en) * | 2020-06-17 | 2020-09-29 | 翱捷科技(上海)有限公司 | Timing deviation compensation method and device and electronic equipment |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2010067034A3 (en) | 2010-09-02 |
| WO2010067034A2 (en) | 2010-06-17 |
| US9005145B2 (en) | 2015-04-14 |
| FR2939687B1 (en) | 2016-04-15 |
| US20110275480A1 (en) | 2011-11-10 |
| EP2370184A2 (en) | 2011-10-05 |
| FR2939687A1 (en) | 2010-06-18 |
| CA2746440A1 (en) | 2010-06-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2370184B1 (en) | Muscle and/or joint exercise apparatus | |
| JP7464534B2 (en) | Rowing | |
| US20200289890A1 (en) | Intelligent Exercise or Therapy Apparatus and Method | |
| JP6734944B2 (en) | Computerized exercise equipment | |
| US8911327B1 (en) | Rehabilitation device and method | |
| US20080234113A1 (en) | Gait Rehabilitation Methods and Apparatuses | |
| CN113747950A (en) | Systems, methods, and apparatus for exercise or rehabilitation devices | |
| EP1631421A2 (en) | Method and system for motion improvement | |
| US20230120124A1 (en) | Balance trainer simulator system and method | |
| WO2011135274A1 (en) | Physical exercise appliance provided with an electric motor | |
| EP0329748B1 (en) | Multifunctional physical exercising apparatus and process for controlling it | |
| Fitzgerald et al. | The development and preliminary evaluation of a training device for wheelchair users: The GAMEWheels system | |
| di Luzio et al. | An adaptive arm-weight support platform for 3d upper limb robot-aided neuro-rehabilitation | |
| Fang et al. | Impedance control and test of an automatic rotational orthosis for walking with arm swing | |
| WO2022125902A1 (en) | Climbing exercise machine | |
| EP2362802A2 (en) | Rehabilitation device | |
| CN118634126A (en) | Knee joint rehabilitation auxiliary system based on electronic information hardware technology | |
| FR2875140A1 (en) | Training and rehabilitation method for improving sports gesture of athlete, involves loading personalized knee kinematics model and parameters relative to type of physical exercise in order to force knee to follow preset movement | |
| Suzuki et al. | Load on shoulder and elbow joints during autonomous hand-cycling |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20110629 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO SE SI SK SM TR |
|
| DAX | Request for extension of the european patent (deleted) | ||
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 613986 Country of ref document: AT Kind code of ref document: T Effective date: 20130615 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: FRENCH |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602009016106 Country of ref document: DE Effective date: 20130725 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 613986 Country of ref document: AT Kind code of ref document: T Effective date: 20130529 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130529 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130529 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130529 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130930 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130830 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130929 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130829 Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130529 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130909 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130529 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: VDEP Effective date: 20130529 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130829 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130529 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130529 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130529 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130529 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130529 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130529 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130529 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130529 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130529 Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130529 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20140303 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602009016106 Country of ref document: DE Effective date: 20140303 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130529 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130529 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130529 Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130529 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20091211 Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130529 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130529 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 7 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 8 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 9 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 10 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: LU Payment date: 20211117 Year of fee payment: 13 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20211213 Year of fee payment: 13 Ref country code: IE Payment date: 20211122 Year of fee payment: 13 Ref country code: DE Payment date: 20211027 Year of fee payment: 13 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 20211116 Year of fee payment: 13 Ref country code: BE Payment date: 20211221 Year of fee payment: 13 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 602009016106 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20221211 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20221231 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221211 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221231 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221211 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221211 Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230701 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221231 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221231 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20231121 Year of fee payment: 15 |