EP1790403A1 - Realistic coordinating of specific body part movements in mechanical toys - Google Patents
Realistic coordinating of specific body part movements in mechanical toys Download PDFInfo
- Publication number
- EP1790403A1 EP1790403A1 EP06124392A EP06124392A EP1790403A1 EP 1790403 A1 EP1790403 A1 EP 1790403A1 EP 06124392 A EP06124392 A EP 06124392A EP 06124392 A EP06124392 A EP 06124392A EP 1790403 A1 EP1790403 A1 EP 1790403A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- limb portion
- upper limb
- extended position
- movement
- portions
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 210000003414 extremity Anatomy 0.000 claims abstract description 106
- 210000001364 upper extremity Anatomy 0.000 claims abstract description 101
- 230000000284 resting effect Effects 0.000 claims abstract description 27
- 210000003141 lower extremity Anatomy 0.000 claims description 25
- 230000007246 mechanism Effects 0.000 claims description 7
- 230000008878 coupling Effects 0.000 claims description 5
- 238000010168 coupling process Methods 0.000 claims description 5
- 238000005859 coupling reaction Methods 0.000 claims description 5
- 238000000034 method Methods 0.000 claims 1
- 241001465754 Metazoa Species 0.000 abstract description 12
- 241000282326 Felis catus Species 0.000 abstract description 10
- 238000005516 engineering process Methods 0.000 description 6
- 230000000712 assembly Effects 0.000 description 4
- 238000000429 assembly Methods 0.000 description 4
- 238000004898 kneading Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000004888 barrier function Effects 0.000 description 2
- 230000036544 posture Effects 0.000 description 2
- 230000003993 interaction Effects 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
Images





Classifications
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63H—TOYS, e.g. TOPS, DOLLS, HOOPS OR BUILDING BLOCKS
- A63H13/00—Toy figures with self-moving parts, with or without movement of the toy as a whole
- A63H13/02—Toy figures with self-moving parts, with or without movement of the toy as a whole imitating natural actions, e.g. catching a mouse by a cat, the kicking of an animal
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63H—TOYS, e.g. TOPS, DOLLS, HOOPS OR BUILDING BLOCKS
- A63H11/00—Self-movable toy figures
- A63H11/18—Figure toys which perform a realistic walking motion
- A63H11/20—Figure toys which perform a realistic walking motion with pairs of legs, e.g. horses
Definitions
- the present invention relates to mechanical toys with movable body parts. More particularly, the invention relates to a realistic electro-mechanical toy that can replicate lifelike resting and active positions and movements of animals and other creatures while they are supported on a surface as well as when they are picked up by a user by coordinating the positioning and movement of specific body parts.
- an embodiment of the invention provides realistic mechanical toy operations that can replicate lifelike resting and active positions and movements of animals and other creatures while they are supported on a surface as well as when they are picked up by a user by coordinating the positioning and movement of specific body parts.
- An upper limb portion facilitates extension of an intermediate limb portion when the upper limb portion is in its extended position, and retracts the intermediate limb portion when the upper limb portion is in its resting position with a biased joint positioning the intermediate limb portion to its extended position when the body is elevated away from a supporting surface.
- the limbs of the present invention provides for emulating this drop down or drooping leg positioning by overriding the retracting function of each limb portion when the body is elevated from a supporting surface providing a realistic drop down leg feature in each limb.
- a realistic electro-mechanical toy generally shown in FIG. 1A as reference numeral 10, providing limbs which emulate movements and positions of real live animals and other creatures both while they are being supported on a surface as well as when they are picked up to be played with by a user.
- the animals are seen to drop down or droop their legs when they are picked up off a supporting surface.
- Cats in particular can easily be shown to drop down or droop their legs in what looks like a relaxed and non-flexing position when they are picked up from a supporting surface.
- the toy 10 of the present invention provides for limbs which emulate this drop down or drooping leg positioning by overriding the retracting function of each limb portion when the toy 10 is elevated from a supporting surface providing a realistic drop down leg feature in each limb.
- the toy 10 may look like a variety of animals and creatures real or imagined with any number of movable limbs, and in an embodiment, the toy 10 takes on the shape of a cat and includes a pair of front limbs 12 and 14, and a pair of rear or hind limbs 16 and 18 each attached to a torso having a spine, upper portion and lower portion etc., hereafter referred to as body 20.
- Front limb 12 mimics a cat's front limb and includes three limb portions namely an upper limb portion 22, an intermediate limb portion 24 and a lower limb portion 26. It is contemplated however, that a front limb of a different creature or animal embodied by the present invention may contain more or less than three limb portions.
- Upper limb portion 22 is pivotally attached to the body 20 allowing reciprocatory movement of the upper limb portion 22 between a first resting position as seen in FIG. 2 and a second extended position as seen in FIGS. 1A-C.
- a drive assembly generally referred to as reference numeral 28 and seen in FIG. 4, is coupled to the upper limb portion 22 and a motor (not shown) is included in the body 20 or coupled to the body 20 for driving movement of the upper limb portion 22.
- the intermediate limb portion 24 is pivotally attached to the upper limb portion 22 which extends the intermediate limb portion 24 when the upper limb portion 22 is in the second extended position as seen in FIG. 1 B, and retracts the intermediate limb portion 24 when the upper limb portion 22 is in the first resting position as seen in FIG. 2.
- a spring biased joint 30 is operative to bias the position of the intermediate limb portion 24 to the second extended position when the body 20 is elevated away from a supporting surface, such as when a user picks up the toy 10 to play with it.
- the spring biased joint connects the intermediate limb portion 24 to the upper limb portion 22, however, in another embodiment, the spring biased joint may connect an upper limb portion to the body, as can be seen in the rear or hind limbs 16 and 18 and further discussed below.
- a lower limb portion 26 is pivotally attached to the intermediate limb portion 24 by a spring biased joint 32 as seen in FIG. 1B.
- the spring biased joint is operative to bias the lower limb portion 26 to an extended position when the upper limb portion 22 is in the first resting position as seen in FIG. 2, as well as when the body 20 is elevated away from a supporting surface such as when the toy 10 is picked up by a user.
- a stop assembly 34 is coupled to the lower limb portion 26 limiting the range of movement of the lower limb portion.
- the stop assembly 34 comprises a fixed barrier portion 36 that contacts a protrusion 38 attached to or integral with the lower limb portion 26 preventing pivoting of the protrusion 38 beyond the fixed barrier portion 26, however any standard stop assembly know in the art could also be utilized to limit the range of movement of the lower limb portion 26.
- Movement of the front limb portions is driven by the motor and directed by the drive assembly 28 which cooperates with a linkage assembly 40 and/or a gear sector linkage 100 coupled to limb portions 22 and 24.
- the drive assembly 28 (discussed in detail below) includes a cam mechanism 56 and a linkage 58, having two arms 58a and 58b, coupled to upper limb portion 22 at arm 58a for directing the reciprocatory movement of limb portion 22.
- a stop assembly 31 is linked to the upper limb portion 22 for limiting the range of movement of limb portion 22.
- the stop assembly 31, as seen in FIGS. 1A-C and 2 comprises a fixed post, screw, or protrusion 33 attached to or integral with the body 20 extending through a slot 35 cut through front upper limb portion 22.
- the linkage assembly 40 discussed herein includes two generally flat, elongated, and non-flexible links 40a and 40b which work together to extend and retract the intermediate limb portion 24 when the upper limb portion 22 is in the second extended position as seen in FIG. 1B, and in the first resting position as seen in FIG. 2, respectively.
- Elongated link 40a includes ends 41 and 43 and end 41 of link 40a is pivotally attached, by a screw, or pin, or any other known means, to upper limb portion 22 at attachment point 42 toward a distal end 23 of upper limb portion 22, as seen in FIG. 1 B.
- Link 40a further includes a generally oval opening 44 at end 43 opposite the attachment point 42 through which the fixed post, screw, or protrusion 33 attached to or integral with the body 20 extends.
- post 33 is also part of stop assembly 31 extending through opening 44 and slot 35 in the upper limb portion 22.
- Post 33 also includes a lip 46 which engages link 40a preventing link 40a from slipping off post 33 while post 33 is allowed to move within the perimeter of opening 44 as the upper limb portion 22 extends and retracts.
- elongated link 40b includes ends 45 and 47, however, end 45 is pivotally attached, by a screw, or pin, or any other known means, to intermediate limb portion 24 at an attachment point 48 toward a proximate end 25 of intermediate limb portion 24, as seen in FIG. 1 B.
- Link 40b further includes a generally oval opening 50 toward end 47 opposite the attachment point 48 through which a fixed post, screw, or protrusion 52 attached to or integral with the upper limb portion 22 extends.
- Post 52 also includes a lip 54 which engages link 40b preventing link 40b from slipping off post 52 while post 52 is allowed to move within the perimeter of opening 50 as the upper limb portion 22 extends and retracts.
- Front limb 14 includes the same three limb portions, connections, and linkages as described for front limb 12 and moves and positions simultaneously and in the same manner as described for front limb 12.
- links 40A and 40B are rigid and strong enough to hold the toy 10 in a cat-like sitting position, as seen in FIGS. 1A-B.
- links 40A and 40B pivot to retract the front limb portions such that the toy appears as a cat resting in a laying position as partially seen in FIG. 2.
- movement of the front upper limb portions may be directed by the drive assembly 28 cooperating with the gear sector linkage 100 coupled to limb portions 22 and 24 and operative to extend the intermediate limb portion 24 when the upper limb portion 22 is in the second extended position as seen in FIG. 1C, and retract the intermediate limb portion 24 when the upper limb portion 22 is in the first retracted position.
- the gear sector linkage 100 discussed herein includes a first gear sector link 102 coupled to the upper limb portion 22 and cooperating with a second gear sector link 104 (indicated by dashed line reference and inset illustration to FIG. 1C) at least partially contained within the spring biased joint 30 and coupled to the intermediate limb portion 24, as seen in FIG. 1C.
- First gear sector link 102 is generally flat, elongated and coupled through a pivot point 106 fixed to the upper limb portion 22.
- First gear sector link 102 has a first end 108 which includes a span of teeth that engage with teeth included in second gear sector link 104 extending and retracting the intermediate limb portion 24 as the first gear sector link 102 rotates around pivot point 106.
- the drive assembly 28 provides the gear assembly of first and second sector gears 102, 104 coupling the upper limb portion to the intermediate limb portion for directing movement of the intermediate limb portion.
- First gear sector link 102 has a second end 110 which includes a captive elongated slot 112 through which post 33 extends, providing a stop assembly linked to the upper limb portion for limiting the range of movement of the upper limb portion similar to described stop assembly 31.
- post 33 is attached to or integral with the body 20 and moves within the perimeter of slot 112 rotating the first gear sector link 102 about pivot point 106 as the upper limb portion 22 is extended and retracted.
- Engagement of first gear link 102 with second gear link 104 as link 102 is rotated extends and retracts the intermediate limb portion 24 as the upper limb portion 22 is extended and retracted, respectively.
- links 102 and 104 are rigid and strong enough to hold the toy 10 in a cat-like sitting position, as seen in FIG. 1C.
- links 102 and 104 pivot to retract the front limb portions such that the toy appears as a cat resting in a laying position.
- movement of the front upper limb portions may be directed by the drive assembly 28 cooperating with a gear assembly coupling the upper limb portion 22 to the body 20 for directing movement of the upper limb portion 22.
- the gear assembly contemplated may include a stop assembly similar to stop assembly 31, described above, for limiting the range of movement of the upper limb portion.
- the cam mechanism 56 includes a disc shaped cam member 60 with an attached or integral pin 62, and an elongated follower 64 or actuator linkage thereof.
- Elongated follower 64 has a generally oval shaped slot 66 formed at an end 68, defined by slot wall 70 and including surface 70a which, when actuated, engages pin 62 of cam 60.
- follower 64 has a generally oval shaped slot 72 at end 74, opposite end 68, defined by slot wall 76 and including surface 76a which, when actuated, engages linkage 58. More specifically, as motor 20 rotates cam 60, pin 62 rides along follower surface 70a at end 68, translating into a back and forth reciprocatory movement of follower 64.
- arm 58b of linkage 58 engages follower surface 76a at end 74 transferring the reciprocatory movement of follower 64 to upper limb portion 22 which is attached to arm 58a of linkage 58.
- the rotation of cam 60 by motor 20 is translated into the reciprocatiory movement of the upper limb portion 22.
- the cam mechanism 56 is also linked to the body 20 which separates into an upper body portion 78 and a lower body portion 80, as seen in FIGS. 1A-C.
- a body linkage 82 couples both body portions 78 and 80 to the cam mechanism 56 which is operable to move the body portions in opposite directions.
- Linkage 82 has generally a wide V shape with an end 84 coupled to lower body portion 80 and an end 86 coupled to upper body portion 78 and also coupled to linkage arm 58b.
- This separating and coming together of body portions 78 and 80 further coordinates the realistic positioning and movement of specific limb portions, and also serves to generate a kneading motion commonly seen in real cats while in a downward position with retracted front limbs.
- the kneading motion occurs with movement of the body portions 78 and 80 while the toy 10 is in a first resting position, as seen in FIG. 2.
- the body portions 78 and 80 are separated from each other in the first resting position and subtle movement of body portions 78 and 80 toward and away from each other make the front limbs appear to move back and forth and simulate a real cat's kneading motion.
- Rear or hind limb 16 mimics a cat's rear or hind limb and includes three limb portions namely a rear upper limb portion 84, a rear intermediate limb portion 86 and a rear lower limb portion 88. It is contemplated however, that a rear limb of a different creature or animal embodied by the present invention may contain more or less than three limb portions.
- Rear upper limb portion 84 is pivotally attached to body 20, and more particularly, to the lower body portion 80, as seen in FIG. 3.
- the rear upper limb portion 84 is coupled to an axel linked to the motor for moving the limb portion 84 between retracted and extended positions.
- the rear upper limb portion 84 is attached to the body by a spring biased joint 90 biasing the limb portion 84 to an extended position when the body 20 is elevated away from a supporting surface such as when the toy 10 is picked up by a user.
- This drop down limb feature overrides the retracting movement of the limb providing a realistic limb feature which emulates a live cat's hind limb which droops in what looks like a relaxed and non-flexing position when they are picked up off a supporting surface.
- a stop assembly 92 limiting the range of movement of the limb portion 84.
- the stop assembly 92 as seen in FIG. 3, is the same structure and acts in the same manner as seen with stop assembly 31, discussed above, however, other embodiments of the invention may utilize alternative known stop assemblies.
- a rear intermediate limb portion 86 is pivotally attached to the rear upper limb portion 84 and is retracted and extended as the rear upper limb portion 84 retracts and extends, respectively.
- a rear lower limb portion 88 is pivotally attached to the rear intermediate limb portion 86 by a spring biased joint 94, as seen in FIG. 3.
- the spring biased joint is operative to bias the rear lower limb portion 88 to an extended position when the body 20 is elevated away from a supporting surface such as when the toy 10 is picked up by a user.
- a stop assembly may be coupled to the rear lower limb portion 88 for limiting the range of movement of the lower limb portion.
- the stop assembly coupled to the rear lower limb portion 88 is the same structure and acts in the same manner as seen with stop assembly 34 discussed above, however, other embodiments of the invention may utilize alternative known stop assemblies.
- Rear limb 18 includes the same three limb portions, connections, and linkages as described for rear limb 16 and moves and positions simultaneously and in the same manner as described for rear limb 16.
Landscapes
- Toys (AREA)
Abstract
A realistic electro-mechanical toy that can replicate lifelike resting and active positions and movements of animals and other creatures while they are supported on a surface as well as when they are picked up by a user by coordinating the positioning and movement of specific body parts. To this end it is regarded that through observation of real live animals, the animals are seen to drop down or droop their legs when they are picked up off a supporting surface. Cats in particular can easily be shown to drop down or droop their legs in what looks like a relaxed and non-flexing position when they are picked up from a supporting surface. An upper limb portion (22) facilitates extension of an intermediate limb portion (24) when the upper limb portion is in its extended position, and retracts the intermediate limb portion when the upper limb portion is in its resting position with a biased joint (30) positioning the intermediate limb portion (24) to its extended position when the body is elevated away from a supporting surface. Accordingly the limbs of the present invention provides for emulating this drop down or drooping leg positioning by overriding the retracting function of each limb portion when the body is elevated from a supporting surface providing a realistic drop down leg feature in each limb.
Description
- The present invention relates to mechanical toys with movable body parts. More particularly, the invention relates to a realistic electro-mechanical toy that can replicate lifelike resting and active positions and movements of animals and other creatures while they are supported on a surface as well as when they are picked up by a user by coordinating the positioning and movement of specific body parts.
- The toy industry has seen an evolution of technology in recent years which has coincided with a consumer demand for more and more realistic toys and games. Several sectors of the toy industry have used technological advancements to make toys and games more realistic and lifelike. For example, video games are more realistic and lifelike than anyone could have imagined even ten years ago, baseballs can measure their own velocities when thrown, and dolls can now speak, walk, and even roller skate. As technology continues to improve, consumers want toys that have more capabilities or that are more realistic.
- Consumer driven evolutions in the industry is found in toys embodied as creatures, animals, dolls and various other life forms real or imagined. To provide a more realistic and interactive doll or toy, a cost - technology trade off becomes important. As is known, new technologies cannot typically be implemented to meet customer demands because of other constraints played on the industry by consumers. One of the most important constraints is cost. Therefore, even though technologies may exist to meet consumer demands, those technologies cannot be applied to this industry until they have adapted in such a way as to be more cost effective. To this end, the toy industry has employed relatively inexpensive motors and linkage assemblies to provide realistic mechanical dolls and toys. However, although such dolls may provide some realistic movable body parts, the dolls do not exhibit realistic limb movements and postures in both active and resting positions, while the doll is supported on a surface as well as when the doll is picked up to be held by a user.
- Recent attempts to increase the realism of a doll or toys' appendage has focused on improved structures in the appendage system. One improved appendage system is disclosed in
U.S. Patent No. 6,843,703 entitled "Electromechanical Toy" to laconis et al., issued January 18, 2005, and assigned to Applicants' Assignee. The 703 patent incorporates an arm fixed to rotate in a circular path at one end and having a second unfixed end capable of movement in a non-circular path, providing an uncomplicated and low cost appendage system which provides realistic movement in response to sensed conditions. - In view of the foregoing, a need exists for a limb or appendage system to coordinate realistic limb movements and postures in both active and resting positions, while the doll or toy is supported on a surface as well as when the doll or toy is picked up to be held by a user, such that the doll or toy provides lifelike movements facilitating realistic interaction with a user.
- Briefly summarized, an embodiment of the invention provides realistic mechanical toy operations that can replicate lifelike resting and active positions and movements of animals and other creatures while they are supported on a surface as well as when they are picked up by a user by coordinating the positioning and movement of specific body parts. An upper limb portion facilitates extension of an intermediate limb portion when the upper limb portion is in its extended position, and retracts the intermediate limb portion when the upper limb portion is in its resting position with a biased joint positioning the intermediate limb portion to its extended position when the body is elevated away from a supporting surface. Accordingly the limbs of the present invention provides for emulating this drop down or drooping leg positioning by overriding the retracting function of each limb portion when the body is elevated from a supporting surface providing a realistic drop down leg feature in each limb.
- Additional objects and advantages of the invention will be set forth below with reference to the drawings and the detailed description. It is to be understood that the invention is not limited in its application to the details of the examples provided in the description or illustrated in the drawings. The invention is capable of other embodiments and of being practiced or carried out for a variety of applications and in various ways.
-
- FIG. 1A is a perspective view of a toy of the present invention illustrating a front upper limb portion in a second extended position;
- FIG. 1B is a perspective view of an embodiment of the present invention illustrating a linkage assembly coupled to the front upper limb portion in the second extended position;
- FIG. 1C is a perspective view of an embodiment of the present invention illustrating a gear sector linkage coupled to the front upper limb portion in the second extended position;
- FIG. 2 illustrates the front upper limb portion of the toy in a first resting position:
- FIG. 3 illustrates a rear limb of the toy; and
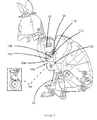
- FIG. 4 illustrates a cam drive assembly of the toy.
- A realistic electro-mechanical toy, generally shown in FIG. 1A as
reference numeral 10, providing limbs which emulate movements and positions of real live animals and other creatures both while they are being supported on a surface as well as when they are picked up to be played with by a user. To this end it is regarded that through observation of real live animals, the animals are seen to drop down or droop their legs when they are picked up off a supporting surface. Cats in particular can easily be shown to drop down or droop their legs in what looks like a relaxed and non-flexing position when they are picked up from a supporting surface. Thetoy 10 of the present invention provides for limbs which emulate this drop down or drooping leg positioning by overriding the retracting function of each limb portion when thetoy 10 is elevated from a supporting surface providing a realistic drop down leg feature in each limb. Thetoy 10 may look like a variety of animals and creatures real or imagined with any number of movable limbs, and in an embodiment, thetoy 10 takes on the shape of a cat and includes a pair offront limbs hind limbs body 20. -
Front limb 12 mimics a cat's front limb and includes three limb portions namely anupper limb portion 22, anintermediate limb portion 24 and alower limb portion 26. It is contemplated however, that a front limb of a different creature or animal embodied by the present invention may contain more or less than three limb portions.Upper limb portion 22 is pivotally attached to thebody 20 allowing reciprocatory movement of theupper limb portion 22 between a first resting position as seen in FIG. 2 and a second extended position as seen in FIGS. 1A-C. A drive assembly generally referred to asreference numeral 28 and seen in FIG. 4, is coupled to theupper limb portion 22 and a motor (not shown) is included in thebody 20 or coupled to thebody 20 for driving movement of theupper limb portion 22. - The
intermediate limb portion 24 is pivotally attached to theupper limb portion 22 which extends theintermediate limb portion 24 when theupper limb portion 22 is in the second extended position as seen in FIG. 1 B, and retracts theintermediate limb portion 24 when theupper limb portion 22 is in the first resting position as seen in FIG. 2. A springbiased joint 30 is operative to bias the position of theintermediate limb portion 24 to the second extended position when thebody 20 is elevated away from a supporting surface, such as when a user picks up thetoy 10 to play with it. In an embodiment, the spring biased joint connects theintermediate limb portion 24 to theupper limb portion 22, however, in another embodiment, the spring biased joint may connect an upper limb portion to the body, as can be seen in the rear orhind limbs - A
lower limb portion 26 is pivotally attached to theintermediate limb portion 24 by a springbiased joint 32 as seen in FIG. 1B. The spring biased joint is operative to bias thelower limb portion 26 to an extended position when theupper limb portion 22 is in the first resting position as seen in FIG. 2, as well as when thebody 20 is elevated away from a supporting surface such as when thetoy 10 is picked up by a user. Further, a stop assembly 34 is coupled to thelower limb portion 26 limiting the range of movement of the lower limb portion. In an embodiment, the stop assembly 34 comprises afixed barrier portion 36 that contacts aprotrusion 38 attached to or integral with thelower limb portion 26 preventing pivoting of theprotrusion 38 beyond thefixed barrier portion 26, however any standard stop assembly know in the art could also be utilized to limit the range of movement of thelower limb portion 26. - Movement of the front limb portions is driven by the motor and directed by the
drive assembly 28 which cooperates with alinkage assembly 40 and/or agear sector linkage 100 coupled tolimb portions cam mechanism 56 and alinkage 58, having twoarms upper limb portion 22 atarm 58a for directing the reciprocatory movement oflimb portion 22. Further, astop assembly 31 is linked to theupper limb portion 22 for limiting the range of movement oflimb portion 22. Thestop assembly 31, as seen in FIGS. 1A-C and 2, comprises a fixed post, screw, orprotrusion 33 attached to or integral with thebody 20 extending through aslot 35 cut through frontupper limb portion 22. As is seen in FIGS. 1A-C and 2 the range of reciprocatory movement ofupper limb portion 22 extends to the length of theslot 35 as thepost 33 stops movement of thelimb portion 22 beyond the slot length. Likewise, alternative stop assemblies, known in the art, or a post located on either side of the width of theupper limb portion 22 rather than extending through the limb portion, can also be utilized in alternate embodiments of the present invention. - The
linkage assembly 40 discussed herein includes two generally flat, elongated, andnon-flexible links intermediate limb portion 24 when theupper limb portion 22 is in the second extended position as seen in FIG. 1B, and in the first resting position as seen in FIG. 2, respectively. Elongatedlink 40a includesends end 41 oflink 40a is pivotally attached, by a screw, or pin, or any other known means, toupper limb portion 22 atattachment point 42 toward adistal end 23 ofupper limb portion 22, as seen in FIG. 1B. Link 40a further includes a generallyoval opening 44 atend 43 opposite theattachment point 42 through which the fixed post, screw, orprotrusion 33 attached to or integral with thebody 20 extends. As seen in the embodiment of FIG. 2,post 33 is also part ofstop assembly 31 extending through opening 44 andslot 35 in theupper limb portion 22.Post 33 also includes alip 46 which engageslink 40a preventinglink 40a from slipping offpost 33 whilepost 33 is allowed to move within the perimeter of opening 44 as theupper limb portion 22 extends and retracts. - Similar to
link 40a,elongated link 40b includesends end 45 is pivotally attached, by a screw, or pin, or any other known means, tointermediate limb portion 24 at anattachment point 48 toward aproximate end 25 ofintermediate limb portion 24, as seen in FIG. 1B. Link 40b further includes a generallyoval opening 50 towardend 47 opposite theattachment point 48 through which a fixed post, screw, orprotrusion 52 attached to or integral with theupper limb portion 22 extends.Post 52 also includes alip 54 which engageslink 40b preventing link 40b from slipping offpost 52 whilepost 52 is allowed to move within the perimeter of opening 50 as theupper limb portion 22 extends and retracts. As a result of thelinkage assembly 40, as described above, extension of theupper limb portion 22 simultaneously pivots bothlinks intermediate limb portion 24. Likewise, retraction of theupper limb portion 22 simultaneously pivots bothlinks intermediate limb portion 24. -
Front limb 14 includes the same three limb portions, connections, and linkages as described forfront limb 12 and moves and positions simultaneously and in the same manner as described forfront limb 12. Asfront limbs toy 10 in a cat-like sitting position, as seen in FIGS. 1A-B. Additionally, asfront limbs - In a present described embodiment, movement of the front upper limb portions may be directed by the
drive assembly 28 cooperating with thegear sector linkage 100 coupled tolimb portions intermediate limb portion 24 when theupper limb portion 22 is in the second extended position as seen in FIG. 1C, and retract theintermediate limb portion 24 when theupper limb portion 22 is in the first retracted position. Thegear sector linkage 100 discussed herein includes a firstgear sector link 102 coupled to theupper limb portion 22 and cooperating with a second gear sector link 104 (indicated by dashed line reference and inset illustration to FIG. 1C) at least partially contained within the spring biased joint 30 and coupled to theintermediate limb portion 24, as seen in FIG. 1C. - First
gear sector link 102 is generally flat, elongated and coupled through apivot point 106 fixed to theupper limb portion 22. Firstgear sector link 102 has afirst end 108 which includes a span of teeth that engage with teeth included in secondgear sector link 104 extending and retracting theintermediate limb portion 24 as the firstgear sector link 102 rotates aroundpivot point 106. To this end, thedrive assembly 28 provides the gear assembly of first and second sector gears 102, 104 coupling the upper limb portion to the intermediate limb portion for directing movement of the intermediate limb portion. Firstgear sector link 102 has asecond end 110 which includes a captiveelongated slot 112 through which post 33 extends, providing a stop assembly linked to the upper limb portion for limiting the range of movement of the upper limb portion similar to describedstop assembly 31. - As described above, post 33 is attached to or integral with the
body 20 and moves within the perimeter ofslot 112 rotating the firstgear sector link 102 aboutpivot point 106 as theupper limb portion 22 is extended and retracted. Engagement offirst gear link 102 withsecond gear link 104 aslink 102 is rotated extends and retracts theintermediate limb portion 24 as theupper limb portion 22 is extended and retracted, respectively. Asfront limbs links toy 10 in a cat-like sitting position, as seen in FIG. 1C. Additionally, asfront limbs links - In another embodiment, movement of the front upper limb portions may be directed by the
drive assembly 28 cooperating with a gear assembly coupling theupper limb portion 22 to thebody 20 for directing movement of theupper limb portion 22. The gear assembly contemplated may include a stop assembly similar to stopassembly 31, described above, for limiting the range of movement of the upper limb portion. As thedrive assembly 28 extends and retracts theupper limb portion 22, the coupled gear assembly simultaneously extends and retracts theintermediate limb portion 24, respectively, and the spring biased jointcoupling limb portions limb portion 24 to an extended position. - The
cam mechanism 56, as seen in FIG. 4, includes a disc shapedcam member 60 with an attached orintegral pin 62, and anelongated follower 64 or actuator linkage thereof.Elongated follower 64 has a generally oval shapedslot 66 formed at anend 68, defined byslot wall 70 and includingsurface 70a which, when actuated, engagespin 62 ofcam 60. Likewise,follower 64 has a generally oval shapedslot 72 atend 74,opposite end 68, defined byslot wall 76 and includingsurface 76a which, when actuated, engageslinkage 58. More specifically, asmotor 20 rotatescam 60,pin 62 rides alongfollower surface 70a atend 68, translating into a back and forth reciprocatory movement offollower 64. At the same time,arm 58b oflinkage 58 engagesfollower surface 76a atend 74 transferring the reciprocatory movement offollower 64 toupper limb portion 22 which is attached toarm 58a oflinkage 58. As a result, the rotation ofcam 60 bymotor 20 is translated into the reciprocatiory movement of theupper limb portion 22. - The
cam mechanism 56, as seen in FIG. 4, is also linked to thebody 20 which separates into anupper body portion 78 and alower body portion 80, as seen in FIGS. 1A-C.A body linkage 82, as seen in FIG. 4, couples bothbody portions cam mechanism 56 which is operable to move the body portions in opposite directions.Linkage 82 has generally a wide V shape with anend 84 coupled tolower body portion 80 and anend 86 coupled toupper body portion 78 and also coupled tolinkage arm 58b. As a result of the connections tolinkage 82, rotation ofcam mechanism 56, which translates into the reciprocatory movement oflinkage 58 and thusupper limb portion 22, as discussed above, translates into the simultaneous movement ofbody portions upper limb portion 22 in the first resting position and movement ofbody portions upper limb portion 22 is in the second extended position, as seen in FIGS. 1A-C. - This separating and coming together of
body portions body portions toy 10 is in a first resting position, as seen in FIG. 2. Thebody portions body portions - Rear or
hind limb 16 mimics a cat's rear or hind limb and includes three limb portions namely a rearupper limb portion 84, a rearintermediate limb portion 86 and a rearlower limb portion 88. It is contemplated however, that a rear limb of a different creature or animal embodied by the present invention may contain more or less than three limb portions. Rearupper limb portion 84 is pivotally attached tobody 20, and more particularly, to thelower body portion 80, as seen in FIG. 3. The rearupper limb portion 84 is coupled to an axel linked to the motor for moving thelimb portion 84 between retracted and extended positions. In an embodiment, the rearupper limb portion 84 is attached to the body by a spring biased joint 90 biasing thelimb portion 84 to an extended position when thebody 20 is elevated away from a supporting surface such as when thetoy 10 is picked up by a user. This drop down limb feature overrides the retracting movement of the limb providing a realistic limb feature which emulates a live cat's hind limb which droops in what looks like a relaxed and non-flexing position when they are picked up off a supporting surface. Further linked to the rearupper limb portion 84 is astop assembly 92 limiting the range of movement of thelimb portion 84. Thestop assembly 92, as seen in FIG. 3, is the same structure and acts in the same manner as seen withstop assembly 31, discussed above, however, other embodiments of the invention may utilize alternative known stop assemblies. - A rear
intermediate limb portion 86 is pivotally attached to the rearupper limb portion 84 and is retracted and extended as the rearupper limb portion 84 retracts and extends, respectively. A rearlower limb portion 88 is pivotally attached to the rearintermediate limb portion 86 by a spring biased joint 94, as seen in FIG. 3. The spring biased joint is operative to bias the rearlower limb portion 88 to an extended position when thebody 20 is elevated away from a supporting surface such as when thetoy 10 is picked up by a user. Further, a stop assembly may be coupled to the rearlower limb portion 88 for limiting the range of movement of the lower limb portion. The stop assembly coupled to the rearlower limb portion 88 is the same structure and acts in the same manner as seen with stop assembly 34 discussed above, however, other embodiments of the invention may utilize alternative known stop assemblies. -
Rear limb 18 includes the same three limb portions, connections, and linkages as described forrear limb 16 and moves and positions simultaneously and in the same manner as described forrear limb 16. - It should be appreciated that a wide range of changes and modifications may be made to the embodiments of the inventions as described herein. It is intended that the foregoing detailed description be regarded as illustrative rather than limiting. While there have been illustrated and described particular embodiments of the inventions, it will be appreciated that numerous changes and modifications will occur to those skilled in the art, and it is intended in the appended claims to cover those changes and modifications which fall within the true spirit and scope of the present invention.
Claims (12)
- An apparatus for realistic movement of a body part, comprising:a body;an upper limb portion pivotally attached to said body allowing reciprocatory movement of the upper limb portion between a first resting position and a second extended position;a biased joint:an intermediate limb portion pivotally attached to said upper limb portion;said upper limb portion extending said intermediate limb portion when said upper limb portion is in the second extended position, and retracting said intermediate limb portion when said upper limb portion is in the first resting position with the biased joint being operative to bias the position of the intermediate limb portion to the second extended position when said body is elevated away from a supporting surface.
- The apparatus as recited in claim 1, further comprising a lower limb portion pivotally attached to said intermediate limb portion by a spring biased joint which is operative to bias the lower limb portion to an extended position when the upper limb portion is in the first resting position, and a stop assembly coupled to the lower limb portion for limiting the range of movement of the lower limb portion.
- The apparatus as recited in claim 1 or claim 2, further comprising a drive assembly coupled to the upper limb portion and a motor in the body for driving movement of the upper limb portion.
- The apparatus as recited in claim 3, wherein the drive assembly comprises a cam mechanism coupled to the motor driving a linkage attached to the upper limb portion for directing movement of the upper limb portion.
- The apparatus as recited in any of the preceding claims, wherein the intermediate limb portion is attached to the upper limb portion by a spring biased joint, and further comprising a linkage assembly coupled to the upper limb portion and the intermediate limb portion for extending and retracting the intermediate limb portion when the upper limb portion is in the second extended position and the first resting position, respectively.
- The apparatus as recited in claim 3, wherein the drive assembly comprises a gear assembly coupling the upper limb portion to the intermediate limb portion for directing movement of the intermediate limb portion, and comprising a stop assembly linked to the upper limb portion for limiting the range of movement of the upper limb portion.
- The apparatus as recited in any of the preceding claims, wherein the biased joint couples the upper limb portion to the body for directing movement of the upper limb portion, and further comprising a stop assembly linked to the upper limb portion for limiting the range of movement of the upper limb portion.
- The apparatus as recited in any of the preceding claims, wherein the body comprises an upper body portion and a lower body portion moving in opposite directions, wherein the body portions are separated when the upper limb portion is in the first resting position and the body portions are together when the upper limb portion is in the second extended position.
- The apparatus as recited in claim 4 and claim 8, further comprising a body linkage coupling the body to the cam mechanism for driving the body portions apart when the upper limb portion is in the first resting position and together when the upper limb portion is in the second extended position.
- A method for coordinating realistic movement of a body part in an apparatus including a body, an upper limb portion pivotally attached to the body allowing reciprocatory movement of the upper limb portion between a first resting position and a second extended position, a biased joint, and an intermediate limb portion pivotally attached to the upper limb portion, comprising the steps of :extending the intermediate limb portion when the upper limb portion is in the second extended position; andretracting the intermediate limb portion when the upper limb portion is in the first resting position with the biased joint being operative to bias the position of the intermediate limb portion to the second extended position when the body is elevated away from a supporting surface.
- An apparatus according to any of the preceding claims, wherein the upper limb portion is a front upper limb portion and the intermediate limb portion is a front intermediate limb portion, the apparatus further comprising a rear upper limb portion pivotally attached by a second biased joint to said body allowing recriprocatory movement of the rear upper limb portion between a first resting position and a second extended position; anda rear intermediate limb portion pivotally attached to said rear upper limb portion;the front and rear upper limb portions extending the front and rear intermediate limb portions, respectively, when the front and rear upper limb portions are in the second extended position, and retracting the front and rear intermediate limb portions, respectively, when the front and rear upper limb portions are in the first resting position, with the first spring biased joint being operative to bias the position of the front intermediate limb portion to the second extended position and the second biased joint being operative to bias the position of the rear upper limb portion to the second extended position when said body is elevated away from a supporting surface.
- The apparatus as recited in claim 11, further comprising a front lower limb portion pivotally attached by a third biased joint to the front intermediated portion, and a rear lower limb portion pivotally attached by a fourth biased joint to the rear intermediate limb portion, with the third and fourth biased joints being operative to bias the position of the front and rear lower limb portions, respectively, to the second extended position when the body is elevated away from a supporting surface.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US74061305P | 2005-11-29 | 2005-11-29 | |
| US11/552,732 US20070123142A1 (en) | 2005-11-29 | 2006-10-25 | Realistic coordinating of specific body part movements in mechanical toys |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP1790403A1 true EP1790403A1 (en) | 2007-05-30 |
Family
ID=37891021
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP06124392A Withdrawn EP1790403A1 (en) | 2005-11-29 | 2006-11-20 | Realistic coordinating of specific body part movements in mechanical toys |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US20070123142A1 (en) |
| EP (1) | EP1790403A1 (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106239523A (en) * | 2016-08-22 | 2016-12-21 | 安徽省徽之尚机电科技有限公司 | A kind of Lobster robot |
| CN115105842A (en) * | 2021-03-23 | 2022-09-27 | 汕头市澄海区骏意玩具设计有限公司 | Interesting crawling toy |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113727767B (en) * | 2018-10-17 | 2023-05-23 | 派拓艺(深圳)科技有限责任公司 | Machine animal splicing model |
| US11957991B2 (en) * | 2020-03-06 | 2024-04-16 | Moose Creative Management Pty Limited | Balloon toy |
| CN116945227A (en) * | 2022-04-19 | 2023-10-27 | 北京小米移动软件有限公司 | Driving mechanism and robot |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3195270A (en) * | 1963-03-01 | 1965-07-20 | Marvin Glass & Associates | Animated toy figure |
| US6120343A (en) * | 1998-12-04 | 2000-09-19 | Giochi Preziosi Lussemburgo Sa | Mechanism for moving the lower limbs of a toy figure |
| WO2001060474A2 (en) * | 2000-02-17 | 2001-08-23 | Dsle System S.A. | Doll simulating a walking action |
| US6752683B1 (en) * | 2003-09-09 | 2004-06-22 | Thomas P. Godfrey | Animated figure |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2924042A (en) * | 1960-02-09 | Walking mechanisms | ||
| DE481725C (en) * | 1924-03-22 | 1929-09-02 | Vittorio Gobbato | Device for displaying the walking movements of quadrupeds |
| US2763095A (en) * | 1953-05-15 | 1956-09-18 | Stearns Albert Frank | Motorless automatic walking doll |
| JPS5044235Y2 (en) * | 1972-05-10 | 1975-12-17 | ||
| US4246722A (en) * | 1979-02-16 | 1981-01-27 | Mattel, Inc. | Growing baby doll |
| US5735726A (en) * | 1996-12-09 | 1998-04-07 | Telco Creations, Inc. | Animated sitting and standing santa character |
| US6095887A (en) * | 1998-02-24 | 2000-08-01 | Onilco Innovacion S.A. | Doll capable of walking with unsteady steps and with falling and upright recovery motions |
| US6280285B1 (en) * | 2000-04-04 | 2001-08-28 | Jeffrey C. Morehouse | Projectile launching action toy having members capable of coordinated movement |
| US6257950B1 (en) * | 2000-05-12 | 2001-07-10 | Jamal M. Saleh | Self-propelled toy |
| US6620021B2 (en) * | 2001-11-13 | 2003-09-16 | Da-Ming Liu | Oscillation device of motion toy |
| US6843703B1 (en) * | 2003-04-30 | 2005-01-18 | Hasbro, Inc. | Electromechanical toy |
-
2006
- 2006-10-25 US US11/552,732 patent/US20070123142A1/en not_active Abandoned
- 2006-11-20 EP EP06124392A patent/EP1790403A1/en not_active Withdrawn
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3195270A (en) * | 1963-03-01 | 1965-07-20 | Marvin Glass & Associates | Animated toy figure |
| US6120343A (en) * | 1998-12-04 | 2000-09-19 | Giochi Preziosi Lussemburgo Sa | Mechanism for moving the lower limbs of a toy figure |
| WO2001060474A2 (en) * | 2000-02-17 | 2001-08-23 | Dsle System S.A. | Doll simulating a walking action |
| US6752683B1 (en) * | 2003-09-09 | 2004-06-22 | Thomas P. Godfrey | Animated figure |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106239523A (en) * | 2016-08-22 | 2016-12-21 | 安徽省徽之尚机电科技有限公司 | A kind of Lobster robot |
| CN115105842A (en) * | 2021-03-23 | 2022-09-27 | 汕头市澄海区骏意玩具设计有限公司 | Interesting crawling toy |
| CN115105842B (en) * | 2021-03-23 | 2024-05-07 | 汕头市澄海区骏意玩具设计有限公司 | Interesting crawling toy |
Also Published As
| Publication number | Publication date |
|---|---|
| US20070123142A1 (en) | 2007-05-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6454626B1 (en) | Motion expressible toy | |
| US20070149089A1 (en) | Customizable action figures | |
| EP1790403A1 (en) | Realistic coordinating of specific body part movements in mechanical toys | |
| US6684552B1 (en) | Turkey decoy | |
| US5147238A (en) | Tap dance doll | |
| GB2170415A (en) | Figure toy having a rotatable torso portion | |
| US20050233675A1 (en) | Animated multi-persona toy | |
| EP1246675A1 (en) | Doll having an arm movement mechanism using a rear-facing lever | |
| EP1212125B1 (en) | Walking animal toy with controlling tether | |
| MX2007005333A (en) | Toy vehicle with improved animated function. | |
| US3758982A (en) | Activity doll | |
| AU731294B2 (en) | Toy having jumping action | |
| US4069613A (en) | Activity doll | |
| US8382551B2 (en) | Toy figure with motion features | |
| US6142851A (en) | Toy with motion transmitting elements | |
| US7695342B1 (en) | Realistic grasping and standing movements in mechanical toys | |
| US5478269A (en) | Toy figure having grasping claw | |
| US4560362A (en) | Animated figure toy having a moveable torso and articulating jaw | |
| US6935919B2 (en) | Animation device for head, mouth, arms and body of a toy | |
| US6752683B1 (en) | Animated figure | |
| US6439949B1 (en) | Moving toy and a method of using the same | |
| CA2329753A1 (en) | Four-legged walking toy with improved leg action | |
| CN114307177B (en) | Human body, hip joint part and rotating mechanism | |
| US4622020A (en) | Glove puppet figure assembly and powered wing drive mechanism | |
| US6616503B1 (en) | Animation device for head and mouth of a toy |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC NL PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA HR MK YU |
|
| AKX | Designation fees paid | ||
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: 8566 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION IS DEEMED TO BE WITHDRAWN |
|
| 18D | Application deemed to be withdrawn |
Effective date: 20071201 |