EP1043101A2 - Drill/driver chuck - Google Patents
Drill/driver chuck Download PDFInfo
- Publication number
- EP1043101A2 EP1043101A2 EP00301306A EP00301306A EP1043101A2 EP 1043101 A2 EP1043101 A2 EP 1043101A2 EP 00301306 A EP00301306 A EP 00301306A EP 00301306 A EP00301306 A EP 00301306A EP 1043101 A2 EP1043101 A2 EP 1043101A2
- Authority
- EP
- European Patent Office
- Prior art keywords
- jaws
- jaw
- drill
- locking means
- actuator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23B—TURNING; BORING
- B23B31/00—Chucks; Expansion mandrels; Adaptations thereof for remote control
- B23B31/02—Chucks
- B23B31/10—Chucks characterised by the retaining or gripping devices or their immediate operating means
- B23B31/12—Chucks with simultaneously-acting jaws, whether or not also individually adjustable
- B23B31/1207—Chucks with simultaneously-acting jaws, whether or not also individually adjustable moving obliquely to the axis of the chuck in a plane containing this axis
- B23B31/1253—Jaws movement actuated by an axially movable member
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23B—TURNING; BORING
- B23B2231/00—Details of chucks, toolholder shanks or tool shanks
- B23B2231/06—Chucks for handtools having means for opening and closing the jaws using the driving motor of the handtool
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23B—TURNING; BORING
- B23B2231/00—Details of chucks, toolholder shanks or tool shanks
- B23B2231/38—Keyless chucks for hand tools
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S279/00—Chucks or sockets
- Y10S279/902—Keyless type socket
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T279/00—Chucks or sockets
- Y10T279/17—Socket type
- Y10T279/17615—Obliquely guided reciprocating jaws
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T279/00—Chucks or sockets
- Y10T279/32—Means to prevent jaw loosening
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T408/00—Cutting by use of rotating axially moving tool
- Y10T408/94—Tool-support
- Y10T408/95—Tool-support with tool-retaining means
- Y10T408/953—Clamping jaws
Definitions
- the present invention relates to a drill/driver chuck mechanism and to a drill/driver including such a chuck.
- the invention has particular, although not exclusive, relevance to such a chuck as used on consumer do it yourself products and the like.
- the chucks for holding a drill bit or a screwdriver bit have been known for many years.
- the chucks generally comprise an inner cylindrical hollow core to which a plurality of jaws are held at an angle.
- the jaws may move into and out of the hollow core thereby clamping a bit therewithin.
- the jaws carry a threaded portion.
- This threaded portion co-operates with a threaded collet member which is generally held circumferentially around the jaws and is able to rotate freely, yet is axially immovable.
- the threads co-operate to advance or retract the jaws.
- the user of the chuck mechanism has to advance or retract the jaws a suitable distance dependent upon the diameter of the bit being grasped.
- a drill/driver chuck mechanism including:
- the jaw locking means comprises a handle actuable to move between the open position and the closed position. This allows ease of use of the mechanism for a do it yourself enthusiast.
- the jaw locking means is operatively coupled to the jaw actuator and causes the jaw actuator to move along the axis of the cylindrical member when the jaw locking means is moved between the open position and the closed position. This allows a straight line advancing or retraction of the jaws, without the need for any rotation about the central axial bore.
- the handle is coupled to a pivotable actuator able to pivot under action of the handle moving between the open position and the closed position, thereby to advance or retract the jaws within their respective bores.
- the pivotable actuator may cause axial movement of the jaw actuator.
- the jaw locking means has an over-centre locking arrangement. This allows for rigid clamping of the jaws about a bit.
- the jaw locking means includes adjustable biasing means for setting the extent of protrusion of the jaws within the central axial bore.
- the jaw locking means may include a pair of co-operable wedge members able to lock against each other.
- a drill/driver chuck mechanism in accordance with an embodiment of the present invention includes a cylindrical member, a chuck body 2 which has therethrough a central axial bore 4.
- the central axial bore4 is formed along an axis 5.
- the chuck body 2 also has a plurality of further bores 6 formed therein.
- the bores themselves are straight, yet slanted with respect to the central axial bore4. This is illustrated most clearly with respect to figures 3a and 3b.
- each of the further bores 6 Co-operable with each of the further bores 6 is a respective one of a plurality of chuck jaws 8. It can be seen that, as there are further bores 6, there are therefore three chuck jaws 8. Each of the chuck jaws 8 is able to move within its respective further bore 6 so that it may be advanced or retracted. Although it is possible for each jaw 8 to be advanced and retracted individually, in the embodiment shown herein, the jaws are advanced and retracted concomitantly. This concomitant movement is achieved by virtue of the co-operation between each jaw 8 and a jaw actuator 10.
- the jaw actuator has a plurality of radially extending channels 12 form therein. Indeed, in this example, there are three such channels 12 (because there are three jaws 8).
- Each jaw 8 co-operates with a respective channel 12 by virtue of the longitudinal flat 14 formed at the rear of each jaw 8.
- the flat 14 sits within the channel 12. At either side of the flat 14 is the full-diameter of the jaw 8 and this prevents any relative movement between the jaw 8 and the jaw actuator 10 in the longitudinal direction of the jaw (and indeed also along the axis 5).
- each jaw 8 is able to move radially relative to the jaw actuator 10 within its respective channel 12. This is because the flat 14 is able to move radially inward and outward within the channel 12. This movement will be described further below.
- a thrust plate 16 An advantageous feature of the invention, which is shown in the drawings, but is not imperative to achieve the objects of the invention, is inclusion of a thrust plate 16.
- the purpose of the thrust plate 16 is to convert a force applied thereto into a force for moving the jaw actuator 10.
- the thrust plate 16 includes spigots 18 the purpose of which will be described further below.
- Figure 4 shows the situation when the jaws 8 are advanced within their respective bores 6 and figure 5 shows the situation where the jaws 8 are retracted within their bores 6.
- figure 3c shows how the slanting of the jaws 8 relative to the central axial bore 4 allows the jaws to not only move axially but also radially with respect to the central axis 5, when advanced or retracted
- figures 3a and 3b show the radial movement more clearly.
- the jaw actuator 10 is advanced and therefore the jaws 8 are also advanced within their respective bores 6 and so the jaws 8 meet beyond the confines of the central axial bore 4 (see figure 3c).
- figure 3a shows the case where the rear of each jaw 8 is radially inward towards the central axis 5. This will be understood because each of the flats 14 of the respective jaws 8, has radially moved towards the central axis 5 via the respective slot 12 in the jaw actuator 10.
- FIG. 3c shows that the shape of the jaw actuator is chosen to be, essentially conical. Indeed the jaws 8 are held relative to the jaws actuator 10 by virtue of the slots 12 and flats 14 such that the central axis 7 along which each jaw 8 travels is normal to the attitude of the face of the jaw actuator 10.
- Figure 3c shows how the plane 9 of the face of the jaw actuator 10 is at ninety degrees to the axis 7 of the jaw 8.
- the thrust plate 16 sits on the rear of the collet member 26, which is part of jaw actuator 10.
- the rear shaft 20 may or may not be integrally formed with the chuck body 2. Indeed the central axial bore 4 of the chuck body 2 may or may not extend within the rear shaft 20.
- the thrust plate 16 is concentric with the central axis 5 of the axial bore 4. In this manner, therefore, the thrust plate 16 may axially slide along the shaft 20 in either direction.
- a thrust bearing is included between the jaw actuator 10 and thrust plate 16.
- the thrust plate 16 also includes a bush 22 to act as a bearing surface between it and the rotatable jaw actuator 10.
- the thrust plate 16 is coupled to the jaw actuator 10 by any suitable means.
- the jaw actuator 10 has an annular recess 24 formed on collet member 26 such that the thrust plate 16 is pushed onto the collet member 26 beyond the annular recess 24 and then a circlip 28 is snap-fitted around the annular recess 24 to hold the thrust plate 16 in place on the collet member 26.
- the collet member 26 may also include an internal bush because this will now contact directly the rear shaft 20. It is an optional feature as to whether the thrust plate 16 is permanently coupled to the jaw actuator 10 in this manner. It is possible for the thrust plate 16 to itself directly contact the rear shaft 20 and simply push or pull the jaw actuator 10 by other means.
- the means by which the jaw actuator 10 is advanced or retracted (or, from viewing figures 6 and 7, move to the left or right along the rear shaft 20) is, in this example, achieved by co-operation between the spigot 18 mounted on thrust plate 16 and a jaw locking means, here a pivoting lever arrangement 32-60. Because any suitable means for advancing or retracting the jaw actuator 10 by virtue of a force applied to the thrust plate 16 may be used, the lever mechanism 32-60 shown herein is simply an example of one of the many means by which this may be achieved.
- the pivoting lever mechanism comprises a first handle 32 which is pivotally coupled to an actuator plate 34 and a locking wedge mechanism shown generally as 36 (but to be described in detail hereafter).
- jaw locking mechanism An important aspect of the jaw locking mechanism shown in figure 6 and 7 is that the advancement of the jaws 8 will stop once a bit inserted into the central axial bore 4 is reached, and a clamping force may be applied to the jaws, regardless of the degree of penetration of the jaws 8 into the central axial bore 4. This means that jaws 8 may be locked within their respective bores 6 regardless of the degree of protrusion of the jaws 8 into the central axial bore 4. This provides significant advantage in that the jaws 8 may, effectively, automatically clamp onto a bit inserted within the central axial bore, and apply a known or given force to this clamping operation, regardless of the diameter of the bit. The operation of the mechanism will be described below.
- this so called “over-force” causes the first wedge member 44 to move downwards in the direction of arrow C as shown in figure 6.
- a second wedge member 48 is mounted in a further handle 50 (as is the first wedge member 44) and is positioned to co-operatively lock with the first wedge member 44 once the two are in engagement.
- an intermediate sliding plate 52 is interposed between the two wedges 44, 48 for reasons that will be explained further below.
- the second wedge 48 is connected to an adjusting screw member 54 which itself is coupled to the body of a drill 56 via a tension spring 58.
- the tension in the spring 58 pulls the second wedge member 48 in the opposite direction to the first wedge member 44. It is the position of the second wedge member 48 within the further handle 50 which dictates the position at which the two wedge members 44, 48 lock together. The position at which the two wedge members 44, 48 lock together can be adjusted by the adjusting screw member 54.
- the reason for having the position at which the wedge members 44, 48 co-operatively lock together is to set the clamping force applied to the thrust plate 16 by movement of the handle 32 thereby causing pivoting of the actuator plate 34. If the second wedge 48 is situated in a raised position within the further handle 50, then the movement of the first wedge 44 downwards in the direction of arrow C, will not be very far. This means that further movement of the connecting rod 42 will not be possible once the two wedges 44, 48 are locked. Further movement of the handle 32in the direction of arrow A will thus result in the over-force in the connecting rod 42 being held therewithin as compressive stress, as the connecting rod 42 deforms and bends out of shape. Indeed, this causes an over-centering of the entire locking mechanism, which results in a very high clamping force being felt by the jaws 8.
- FIG 7 shows the jaw locking mechanism in its closed position wherein over-centering has occurred.
- over-centering occurs when the three pivot points 87, 40 and 46 are not in a straight-line alignment.
- Such an over-centering locking mechanism will be known to those skilled in the art.
- over-centering occurs when pivot point 40 lies to the right hand side (when viewing figure 7) of the straight line joining pivot points 87 and 46 (see figure 7(a)).
- the user In order to release the jaws 8, the user needs to open the handle 32 by moving it in the direction of arrow D shown in figure 7. This firstly allows the connecting rod 42 to spring back into its original position. This means that there is no more over-centering of the locking mechanism and the potential energy stored within the rod 42 has been released. This then means that further movement of the handle 32 in direction of arrow D allows clockwise rotation of the actuator plate 34 about the first pivot point 38 thereby reversing the action of the jaws as described with reference to figure 6.
- a sliding plate 52 is interposed between the two wedge members 44, 48. This helps the two wedge members to separate when the jaw locking mechanism is being moved from its closed position to its open position.
- the plate is made of chrome-plated steel which allows easy sliding of the jaw 44 relative to the jaw 48.
- the plate 52 has a fixed position in relation to both wedges 44, 48 with respect to their direction of movement.
- the plate 52 is, however, able to slide within a recess 60 formed within the further handle 50. This is necessary in order for it to be able to take up the correct attitude in relation to the wedges 44, 48 regardless of the position of the wedge 48 within the further handle 50.
- a drill/driver shown generally as 62 incorporates the chuck mechanism described above.
- the drill/driver shown is actually a drill having an outer body casing 56.
- the drill includes an electric motor 64 coupled to the shaft 20 via a gearbox mechanism 66.
- the drill 62 is powered by an electric battery 68 coupled to the motor 64 via battery contacts 70 and electric wires 72.
- the connection of the battery 68 to the motor 64 via the electric wire 72 is achieved via a trigger switch 74.
- the gearbox 66 may exhibit torque/speeds dependant upon the gears selected.
- a gear selector 76 is coupled to the gearbox 66 via an opening 78 in the body casing 56.
- FIG 10 there is shown a circuit for use with an embodiment of the present invention.
- a sensor 80 detects the degree of axial displacement of the thrust plate 16 relative to a fixed position 82 on the body of the drill 62.
- This sensor co-operates with a potentiometer 84 and a feedback circuit 86 in order to decide how fast the shaft 20 needs to rotate.
- the speed of rotation of the drill bit can, in certain circumstances, be dependent upon its diameter.
- a large diameter bit held by the jaws 8 will result in a small degree of separation between the fixed point 82 and the thrust plate 16. This will be sensed by sensor 80.
- a very small diameter bit will cause a large degree of separation between the fixed point 82 and the thrust plate 16 to be sensed by the sensor 80.
- the output rotational speed of the gearbox 66 may be determined automatically simply by sensing the diameter of the bit held by the jaws 8.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Gripping On Spindles (AREA)
- Drilling And Boring (AREA)
- Drilling Tools (AREA)
- Saccharide Compounds (AREA)
- Perforating, Stamping-Out Or Severing By Means Other Than Cutting (AREA)
Abstract
Description
- The present invention relates to a drill/driver chuck mechanism and to a drill/driver including such a chuck. The invention has particular, although not exclusive, relevance to such a chuck as used on consumer do it yourself products and the like.
- Chucks for holding a drill bit or a screwdriver bit have been known for many years. In the do it yourself market, the chucks generally comprise an inner cylindrical hollow core to which a plurality of jaws are held at an angle. The jaws may move into and out of the hollow core thereby clamping a bit therewithin. In order to advance or retract the jaws, the jaws carry a threaded portion. This threaded portion co-operates with a threaded collet member which is generally held circumferentially around the jaws and is able to rotate freely, yet is axially immovable. Thus, on rotation of the collet member, the threads co-operate to advance or retract the jaws.
- Whilst the above mode of advancing or retracting the jaws is generally acceptable, it does suffer from some short-coming. In order for the chuck to accommodate different diameter bits, the degree or advancing or retracting of the jaws in order to grip these different diameter bits will vary. Large diameter bits will require the jaws to be retracted further yet not advanced particularly far in order to grip the bit in place. Conversely, a small diameter drill bit will need the jaws advanced a relatively long way into the hollow cylinder before gripping the bit. Equally, retraction of the jaws when the bit is of a small diameter need not be particularly far to release the bit.
- Generally, the user of the chuck mechanism has to advance or retract the jaws a suitable distance dependent upon the diameter of the bit being grasped.
- It is an object of the present invention to alleviate the above short-coming by providing a drill/driver chuck mechanism wherein the degree of advancement or retraction of the jaws is automatically compensated for, yet the force with which the bit is gripped by the jaws is not dependent upon this advancement or retraction.
- According to the present invention, therefore, there is provided a drill/driver chuck mechanism including:
- a cylindrical member having a central axial bore and a plurality of further bores, such that the plurality of further bores are slanted with respect to the axis of the cylindrical member, and co-operate with the central axial bore;
- a plurality of jaws, each jaw being associated with a respective one of the further bores and moveable therewithin;
- a jaw actuator, coupled to each of the jaws of the plurality, for moving the jaws within their respective further bores;
- and jaw locking means arranged to lock the jaws in a predetermined position within their respective bores;
- the chuck mechanism characterised by the jaw locking means having an open position and a closed position and wherein, when the jaw locking means is in the open position the jaws are retracted within their respective bores and do not protrude within the central axial bore, and wherein when the jaw locking means is in the closed position, the jaws are locked within their respective bores regardless of the degree of protrusion of the jaws into the central axial bore.
-
- Preferably, the jaw locking means comprises a handle actuable to move between the open position and the closed position. This allows ease of use of the mechanism for a do it yourself enthusiast.
- Additionally, or alternatively, the jaw locking means is operatively coupled to the jaw actuator and causes the jaw actuator to move along the axis of the cylindrical member when the jaw locking means is moved between the open position and the closed position. This allows a straight line advancing or retraction of the jaws, without the need for any rotation about the central axial bore.
- Advantageously the handle is coupled to a pivotable actuator able to pivot under action of the handle moving between the open position and the closed position, thereby to advance or retract the jaws within their respective bores. Futhermore the pivotable actuator may cause axial movement of the jaw actuator.
- Preferably the jaw locking means has an over-centre locking arrangement. This allows for rigid clamping of the jaws about a bit.
- Advantageously the jaw locking means includes adjustable biasing means for setting the extent of protrusion of the jaws within the central axial bore. Furthermore the jaw locking means may include a pair of co-operable wedge members able to lock against each other.
- The present invention will now be described, by way of example only and with reference to the accompanying drawings of which;
- Figure 1 illustrates an exploded perspective view of the major portions of a chuck in accordance with an embodiment of the present invention;
- Figure 2 illustrates the components of figure 1, but in an assembled, non-exploded format;
- Figure 3(a) and (b) illustrate schematically a rear view of the chuck body of figures 1 and 2 and figure 3(c) shows a section through the representation of figure 2 along the line x- x;
- Figures 4 and 5 show respectively a chuck in accordance with the present invention wherein the jaws are advanced and then retracted;
- Figure 6 shows the chuck of figures 4 and 5 coupled to a manually operable actuating means with the jaws retracted;
- Figure 7 shows the chuck of figures 4 and 5 coupled to a manually operable actuating means with the jaws advanced;
- Figure 7(a) illustrates the concept of over-centering of the jaw locking means;
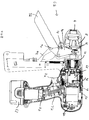
- Figure 8 illustrates schematically a drill/driver including a chuck in accordance with an embodiment of the present invention with the jaws in their advanced position;
- Figure 9 illustrates schematically a drill/driver including a chuck in accordance with an embodiment of the present invention with the jaws in their retracted position, and;
- Figure 10 illustrates schematically a circuit for use with an embodiment of the present invention.
-
- Referring now to figures 1,2 and3 it can be seen that a drill/driver chuck mechanism in accordance with an embodiment of the present invention includes a cylindrical member, a
chuck body 2 which has therethrough a centralaxial bore 4. The central axial bore4 is formed along anaxis 5. Thechuck body 2 also has a plurality offurther bores 6 formed therein. The bores themselves are straight, yet slanted with respect to the central axial bore4. This is illustrated most clearly with respect to figures 3a and 3b. - Co-operable with each of the
further bores 6 is a respective one of a plurality ofchuck jaws 8. It can be seen that, as there arefurther bores 6, there are therefore threechuck jaws 8. Each of thechuck jaws 8 is able to move within its respective furtherbore 6 so that it may be advanced or retracted. Although it is possible for eachjaw 8 to be advanced and retracted individually, in the embodiment shown herein, the jaws are advanced and retracted concomitantly. This concomitant movement is achieved by virtue of the co-operation between eachjaw 8 and ajaw actuator 10. - It can be seen particularly from figure 1 that the jaw actuator has a plurality of radially extending
channels 12 form therein. Indeed, in this example, there are three such channels 12 (because there are three jaws 8). Eachjaw 8 co-operates with arespective channel 12 by virtue of thelongitudinal flat 14 formed at the rear of eachjaw 8. The flat 14 sits within thechannel 12. At either side of theflat 14 is the full-diameter of thejaw 8 and this prevents any relative movement between thejaw 8 and thejaw actuator 10 in the longitudinal direction of the jaw (and indeed also along the axis 5). - It will, however, be realised from figure 1 that each
jaw 8 is able to move radially relative to thejaw actuator 10 within itsrespective channel 12. This is because the flat 14 is able to move radially inward and outward within thechannel 12. This movement will be described further below. - An advantageous feature of the invention, which is shown in the drawings, but is not imperative to achieve the objects of the invention, is inclusion of a
thrust plate 16. The purpose of thethrust plate 16 is to convert a force applied thereto into a force for moving thejaw actuator 10. Thethrust plate 16 includesspigots 18 the purpose of which will be described further below. - Referring now also to figures 4 and 5 the operation of the chuck will be described (for the purposes of clarity, the
thrust plate 16 has not been shown in either figure 4 or figure 5). Figure 4 shows the situation when thejaws 8 are advanced within theirrespective bores 6 and figure 5 shows the situation where thejaws 8 are retracted within theirbores 6. - Starting from figure 5 wherein the jaws are retracted, it can be seen that the left-hand end of the
jaws 8 do not project forward and beyond the confines of thecylindrical chuck body 2. In this position therefore, the jaws do not protrude at all within the centralaxial bore 4. This means that a screwdriver bit or a drill bit (not shown) may be put into thebore 4 of thechuck body 2. The user then needs to advance thejaw actuator 10 in order to advance thejaws 8 within theirrespective bore 6 so that the jaws advance through theirslanted bores 6 to eventually meet beyond the confines ofchuck body 2. Reference to figure 3c will illustrate this more clearly. It can be seen from figure 3c that advancing the jaws moves them both in a radial direction inwardly towards, and an axial direction along, thecentral bore axis 4. - Of course, if a drill or screwdriver bit is inserted into the
bore 4 as thejaws 8 advance along thefurther bore 6, then eventually thejaws 8 grip the bit (not shown) and therefore will not be in the position shown in figure 4. This will be readily appreciated by those skilled in the art. - Whilst figure 3c shows how the slanting of the
jaws 8 relative to the centralaxial bore 4 allows the jaws to not only move axially but also radially with respect to thecentral axis 5, when advanced or retracted, reference to figures 3a and 3b show the radial movement more clearly. In figure 3a, thejaw actuator 10 is advanced and therefore thejaws 8 are also advanced within theirrespective bores 6 and so thejaws 8 meet beyond the confines of the central axial bore 4 (see figure 3c). Thus, figure 3a shows the case where the rear of eachjaw 8 is radially inward towards thecentral axis 5. This will be understood because each of theflats 14 of therespective jaws 8, has radially moved towards thecentral axis 5 via therespective slot 12 in thejaw actuator 10. - Conversely, however, reference to figure 3b shows the situation wherein each
jaw 8 has moved radially outward, as thejaw actuator 10 has been retracted thereby retracting eachjaw 8 within therespective bore 6. - Further reference to figure 3c shows that the shape of the jaw actuator is chosen to be, essentially conical. Indeed the
jaws 8 are held relative to the jaws actuator 10 by virtue of theslots 12 andflats 14 such that the central axis 7 along which eachjaw 8 travels is normal to the attitude of the face of thejaw actuator 10. Figure 3c shows how the plane 9 of the face of thejaw actuator 10 is at ninety degrees to the axis 7 of thejaw 8. - It will be understood that the angle of fifteen degrees between the
axis 5 and 7 is maintained regardless of the position of eachjaw 8 within the bore 6 (and therefore of the axial disposition of thejaw actuator 10 along theshaft 20 on which it is mounted). Although fifteen degrees has been chosen in this example, any suitable attitude will be acceptable, as long as it is maintained throughout the travel of the jaws and the jaw actuator. - Referring now also to figure 6 and 7, it will be described how the addition of the
thrust plate 16 makes advancing and retracting thejaws 8 an easy practical matter. Thethrust plate 16 sits on the rear of thecollet member 26, which is part ofjaw actuator 10. Therear shaft 20 may or may not be integrally formed with thechuck body 2. Indeed the centralaxial bore 4 of thechuck body 2 may or may not extend within therear shaft 20. In any event, it can be seen that thethrust plate 16 is concentric with thecentral axis 5 of theaxial bore 4. In this manner, therefore, thethrust plate 16 may axially slide along theshaft 20 in either direction. Preferably, in order to aid the possible rotation of thechuck body 20,jaws 8, andjaw actuator 10, relative to thenon-rotating thrust plate 16, a thrust bearing is included between thejaw actuator 10 and thrustplate 16. Preferably thethrust plate 16 also includes abush 22 to act as a bearing surface between it and therotatable jaw actuator 10. - The
thrust plate 16 is coupled to thejaw actuator 10 by any suitable means. In the example shown, thejaw actuator 10 has anannular recess 24 formed oncollet member 26 such that thethrust plate 16 is pushed onto thecollet member 26 beyond theannular recess 24 and then acirclip 28 is snap-fitted around theannular recess 24 to hold thethrust plate 16 in place on thecollet member 26. It will, of course, be appreciated by those skilled in the art that thecollet member 26 may also include an internal bush because this will now contact directly therear shaft 20. It is an optional feature as to whether thethrust plate 16 is permanently coupled to thejaw actuator 10 in this manner. It is possible for thethrust plate 16 to itself directly contact therear shaft 20 and simply push or pull thejaw actuator 10 by other means. - Comparing an contrasting figures 6 and 7, it can be seen that in figure 6 the
jaws 8 are retracted from thechuck body 2, whereas in figure 7 thejaws 8 are advanced within (and meet beyond the confines of) thechuck body 2. It will be apparent that the different chuck configuration between figure 6 and 7 is achieved by moving thejaw actuator 10 to the right of therear shaft 20 in figure 6, whereas in figure 7 thejaw actuator 10 is moved to the left of therear shaft 20. This means that in figure 6 thejaw actuator 10 pulls thejaws 8 so that they are retracted within theirrespective bores 6, whereas in figure 7 thejaw actuator 10 pushes thejaws 8 so that they are advanced within theirrespective bores 6. - The means by which the
jaw actuator 10 is advanced or retracted (or, from viewing figures 6 and 7, move to the left or right along the rear shaft 20) is, in this example, achieved by co-operation between thespigot 18 mounted onthrust plate 16 and a jaw locking means, here a pivoting lever arrangement 32-60. Because any suitable means for advancing or retracting thejaw actuator 10 by virtue of a force applied to thethrust plate 16 may be used, the lever mechanism 32-60 shown herein is simply an example of one of the many means by which this may be achieved. - The pivoting lever mechanism comprises a
first handle 32 which is pivotally coupled to anactuator plate 34 and a locking wedge mechanism shown generally as 36 (but to be described in detail hereafter). - Comparing figure 6 with figure 7, it can be seen that in figure 6 the
handle 32 is in the open position whereby theactuator plate 34 is pivoted in a clockwise manner relative to afirst pivot point 38 thereby retracting thejaw actuator 10 and eachjaw 8, whereas in figure 7 thehandle 32 is in a closed position where theactuator plate 34 is pivoted in an anti-clockwise sense about thefirst pivot point 38 thereby advancing thejaw actuator 10 and eachjaw 8. - An important aspect of the jaw locking mechanism shown in figure 6 and 7 is that the advancement of the
jaws 8 will stop once a bit inserted into the centralaxial bore 4 is reached, and a clamping force may be applied to the jaws, regardless of the degree of penetration of thejaws 8 into the centralaxial bore 4. This means thatjaws 8 may be locked within theirrespective bores 6 regardless of the degree of protrusion of thejaws 8 into the centralaxial bore 4. This provides significant advantage in that thejaws 8 may, effectively, automatically clamp onto a bit inserted within the central axial bore, and apply a known or given force to this clamping operation, regardless of the diameter of the bit. The operation of the mechanism will be described below. - Starting from figure 6 wherein the jaws are in their open position, then to close the
jaws 8, thehandle 32 is moved so as to pivot about pivot points 40 and 87 in a generally anticlockwise direction as shown by the arrow A. This causes an anticlockwise rotation of theactuator plate 34 about the first pivot point 38 (as has been discussed above). Once thethrust plate 16 has caused thejaw actuator 10 to push thejaws 8 into engagement with a bit inserted into the centralaxial bore 4, then further pivoting of theactuator plate 34 aboutfirst pivot point 38 will not be possible. However, if thehandle 32 is still being moved in the direction of arrow A, then this further force will be transferred via thesecond pivot point 40 and through connectingrod 42 to a first wedge member 44 via athird pivot point 46. In fact, this so called "over-force" causes the first wedge member 44 to move downwards in the direction of arrow C as shown in figure 6. Asecond wedge member 48 is mounted in a further handle 50 (as is the first wedge member 44) and is positioned to co-operatively lock with the first wedge member 44 once the two are in engagement. In this example, though, an intermediate slidingplate 52 is interposed between the twowedges 44, 48 for reasons that will be explained further below. - The
second wedge 48 is connected to an adjustingscrew member 54 which itself is coupled to the body of adrill 56 via atension spring 58. The tension in thespring 58 pulls thesecond wedge member 48 in the opposite direction to the first wedge member 44. It is the position of thesecond wedge member 48 within the further handle 50 which dictates the position at which the twowedge members 44, 48 lock together. The position at which the twowedge members 44, 48 lock together can be adjusted by the adjustingscrew member 54. - The reason for having the position at which the
wedge members 44, 48 co-operatively lock together is to set the clamping force applied to thethrust plate 16 by movement of thehandle 32 thereby causing pivoting of theactuator plate 34. If thesecond wedge 48 is situated in a raised position within thefurther handle 50, then the movement of the first wedge 44 downwards in the direction of arrow C, will not be very far. This means that further movement of the connectingrod 42 will not be possible once the twowedges 44, 48 are locked. Further movement of the handle 32in the direction of arrow A will thus result in the over-force in the connectingrod 42 being held therewithin as compressive stress, as the connectingrod 42 deforms and bends out of shape. Indeed, this causes an over-centering of the entire locking mechanism, which results in a very high clamping force being felt by thejaws 8. - The position of over-centering is thus dictated by the position of the
second wedge 48. - Reference now also to figure 7 shows the jaw locking mechanism in its closed position wherein over-centering has occurred. In this example, over-centering occurs when the three
pivot points pivot point 40 lies to the right hand side (when viewing figure 7) of the straight line joining pivot points 87 and 46 (see figure 7(a)). - In figure 7, it can be seen that the first wedge 44 has moved down within the further handle 50 relative to position shown in figure 6.
- In order to release the
jaws 8, the user needs to open thehandle 32 by moving it in the direction of arrow D shown in figure 7. This firstly allows the connectingrod 42 to spring back into its original position. This means that there is no more over-centering of the locking mechanism and the potential energy stored within therod 42 has been released. This then means that further movement of thehandle 32 in direction of arrow D allows clockwise rotation of theactuator plate 34 about thefirst pivot point 38 thereby reversing the action of the jaws as described with reference to figure 6. - As has been mentioned hereabove, a sliding
plate 52 is interposed between the twowedge members 44, 48. This helps the two wedge members to separate when the jaw locking mechanism is being moved from its closed position to its open position. In this example the plate is made of chrome-plated steel which allows easy sliding of the jaw 44 relative to thejaw 48. In this example, theplate 52 has a fixed position in relation to bothwedges 44, 48 with respect to their direction of movement. Theplate 52 is, however, able to slide within arecess 60 formed within thefurther handle 50. This is necessary in order for it to be able to take up the correct attitude in relation to thewedges 44, 48 regardless of the position of thewedge 48 within thefurther handle 50. - Referring now to figures 8 and 9, there can be seen how a drill/driver, shown generally as 62 incorporates the chuck mechanism described above. The drill/driver shown is actually a drill having an
outer body casing 56. The drill includes anelectric motor 64 coupled to theshaft 20 via agearbox mechanism 66. Thedrill 62 is powered by anelectric battery 68 coupled to themotor 64 viabattery contacts 70 andelectric wires 72. The connection of thebattery 68 to themotor 64 via theelectric wire 72 is achieved via atrigger switch 74. - Those skilled in the art will appreciate that, for different drilling and driving requirements, the
gearbox 66 may exhibit torque/speeds dependant upon the gears selected. For this purpose agear selector 76 is coupled to thegearbox 66 via anopening 78 in thebody casing 56. - It will be apparent that the only differences between figures 8 and 9 are that in figure 8 the
handle 32 is in its open position whereby thejaws 8 are retracted. Whereas in figure 9, thehandle 32 is in its closed position such that thejaws 8 are advanced. - Referring now to figure 10, there is shown a circuit for use with an embodiment of the present invention. Starting from the position shown figure 9, but assuming that a drill bit (not shown) is held rigidly by the
jaws 8 within the centralaxial bore 4, asensor 80 detects the degree of axial displacement of thethrust plate 16 relative to a fixedposition 82 on the body of thedrill 62. This sensor co-operates with apotentiometer 84 and a feedback circuit 86 in order to decide how fast theshaft 20 needs to rotate. - It is well known that the speed of rotation of the drill bit can, in certain circumstances, be dependent upon its diameter. Clearly a large diameter bit held by the
jaws 8 will result in a small degree of separation between the fixedpoint 82 and thethrust plate 16. This will be sensed bysensor 80. Conversely, a very small diameter bit will cause a large degree of separation between the fixedpoint 82 and thethrust plate 16 to be sensed by thesensor 80. In this way, therefore, the output rotational speed of thegearbox 66 may be determined automatically simply by sensing the diameter of the bit held by thejaws 8.
Claims (9)
- A drill/driver chuck mechanism including:a cylindrical member (2) having a central bore (4) and a plurality of further bores (6), such that the plurality of further bores are slanted with respect to the axis of the cylindrical member, and co-operate with the central axial bore;a plurality of jaws (8), each being associated with a respective one of the further bores and moveable therewithin;a jaw actuator (10), coupled to each of the jaws of the plurality, for moving the jaws within their respective further bores;and jaw locking means (34-60) arranged to lock the jaws in a predetermined position within their respective bores;the chuck mechanism characterised by the jaw locking means (34-60) having an open position and a closed position and wherein, when the jaw locking means is in the open position the jaws (8) are retracted within their respective bores (6) and do not protrude within the central axial bore (4), and wherein when the jaw locking means (34-60) is in the closed position, the jaws are locked within their respective bores regardless of the degree of protrusion of the jaws into the central axial bore (4).
- A drill/driver chuck mechanism according to claim 1 wherein the jaw locking means comprises a handle (32), actuable to move between the open position and the closed position.
- A drill/driver chuck mechanism according to claim 1 or claim 2 wherein the jaw locking means is operatively coupled to the jaw actuator (10) and causes the jaw actuator to move along the axis of the cylindrical member when the jaw locking means is moved between the open position and the closed position.
- A drill/driver chuck mechanism according to claim 2 or claim 3 wherein the handle (32) is coupled to a pivotable actuator able to pivot under action of the handle moving between the open position and the closed position, thereby to advance or retract the jaws (8) within their respective bores.
- A drill/driver chuck mechanism according to claim 4 when appendant to claim 3 wherein the pivotable actuator causes axial movement of the jaw actuator.
- A drill/driver chuck according to any one of the preceding claims wherein the jaw locking means (34-60) has an over-centre locking arrangement.
- A drill/driver chuck according to any one of the preceding claims wherein the jaw locking means includes adjustable biasing means for setting the extent of protrusion of the jaws within the central axial bore.
- A drill/driver chuck according to claim 7 wherein the jaw locking means includes a pair of co-operable wedge members able to lock against each other.
- A drill/driver including a chuck according to any one of the preceding claims.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| GBGB9907468.4A GB9907468D0 (en) | 1999-03-31 | 1999-03-31 | Drill/driver chuck |
| GB9907468 | 1999-03-31 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP1043101A2 true EP1043101A2 (en) | 2000-10-11 |
| EP1043101A3 EP1043101A3 (en) | 2003-07-23 |
| EP1043101B1 EP1043101B1 (en) | 2008-02-06 |
Family
ID=10850753
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP00301306A Expired - Lifetime EP1043101B1 (en) | 1999-03-31 | 2000-02-18 | Drill-driver chuck |
Country Status (10)
| Country | Link |
|---|---|
| US (1) | US6382636B1 (en) |
| EP (1) | EP1043101B1 (en) |
| JP (1) | JP2000288810A (en) |
| CN (1) | CN1168564C (en) |
| AT (1) | ATE385447T1 (en) |
| AU (1) | AU766214B2 (en) |
| CA (1) | CA2299093C (en) |
| DE (1) | DE60037950T2 (en) |
| GB (1) | GB9907468D0 (en) |
| HK (1) | HK1033293A1 (en) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10109490B4 (en) * | 2001-02-28 | 2006-08-10 | Metabowerke Gmbh | chuck |
| US7316404B1 (en) * | 2000-03-29 | 2008-01-08 | Black & Decker Inc. | Drill/driver chuck |
| FR2907354A1 (en) * | 2006-10-24 | 2008-04-25 | Amyot Sa Sa Ets | Tool holder mandrel for e.g. drilling machine equipment, has lock washer buttressed on cylindrical part to avoid backward movement of bits, and projected part provided between ring and washer for realizing buttressing of washer |
| US8381830B2 (en) | 2009-05-05 | 2013-02-26 | Black & Decker Inc. | Power tool with integrated bit retention device |
| US8622401B2 (en) | 2009-02-27 | 2014-01-07 | Black & Decker Inc. | Bit retention device |
| US8800999B2 (en) | 2009-02-27 | 2014-08-12 | Black & Decker Inc. | Bit retention device |
| US10702976B2 (en) | 2018-06-06 | 2020-07-07 | GCX Corporation | Pole clamp |
Families Citing this family (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6786685B2 (en) * | 2002-07-19 | 2004-09-07 | Toolovation, Llc | Power tool having a quick-release chuck assembly |
| WO2008064392A1 (en) * | 2006-06-19 | 2008-06-05 | Demain Technology Pty Ltd | A power tool and chuck release tool |
| US7959162B2 (en) * | 2007-07-26 | 2011-06-14 | Syntheon, Llc | Releasing instrument holder and method of operating the instrument holder |
| US9707376B2 (en) * | 2007-05-18 | 2017-07-18 | Syntheon, Llc | Torque-transmitting, locking instrument holder and method for operating the instrument holder |
| CN201333537Y (en) * | 2009-01-13 | 2009-10-28 | 于庆滋 | Self-tightening drill chuck |
| CN201446519U (en) * | 2009-06-05 | 2010-05-05 | 南京德朔实业有限公司 | Electric tool |
| US9505108B2 (en) | 2012-02-15 | 2016-11-29 | Black & Decker Inc. | Bit holder with floating magnet sleeve |
| US9156147B2 (en) | 2012-02-15 | 2015-10-13 | Black & Decker Inc. | Quick change bit holder with ring magnet |
| US9943946B2 (en) | 2012-02-15 | 2018-04-17 | Black & Decker Inc. | Tool bits with floating magnet sleeves |
| US10150205B2 (en) | 2012-02-15 | 2018-12-11 | Black & Decker Inc. | Fastening tools with floating magnet sleeves |
| US9227309B2 (en) | 2012-02-15 | 2016-01-05 | Black & Decker Inc. | Quick change bit holder with ring magnet |
| CN105922182A (en) * | 2013-08-23 | 2016-09-07 | 苏州宝时得电动工具有限公司 | Power tool |
| WO2015126435A1 (en) * | 2014-02-21 | 2015-08-27 | HYTORC Division Unex Corporation | Apparatus for tightening threaded fasteners |
| CN104354133B (en) * | 2014-09-24 | 2016-08-24 | 郑州跃博汽车电器有限公司 | A kind of lock plate and locking system and use the electric screw driver of this locking system |
| CN105215914B (en) * | 2015-10-19 | 2017-04-12 | 苏州博众精工科技有限公司 | Automatic nut replacing mechanism |
| USD789761S1 (en) | 2015-11-02 | 2017-06-20 | Black & Decker Inc. | Torsion bit |
| DE102016226329A1 (en) * | 2016-12-30 | 2018-07-05 | Bessey Tool Gmbh & Co. Kg | Toggle clamp device |
| CN110560738B (en) * | 2018-06-06 | 2024-07-09 | 苏州宝时得电动工具有限公司 | Hand-held power tool |
| US11203070B2 (en) * | 2018-06-07 | 2021-12-21 | Apex Brands, Inc. | Self-aligning chuck |
| USD955453S1 (en) * | 2020-10-01 | 2022-06-21 | Shukla Medical | Drill bit |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| BE457756A (en) * | ||||
| US3354759A (en) * | 1966-05-03 | 1967-11-28 | Thomas L Cook | Vise grip pliers |
| US4648608A (en) * | 1985-02-27 | 1987-03-10 | Black & Decker, Inc. | Low-cost, keyless chuck and method of manufacture |
| GB2199776A (en) * | 1986-12-31 | 1988-07-20 | Jacobs Mfg Co | Self tightening drill chuck |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| USRE26280E (en) | 1967-10-17 | Self-adjusting flier-type toggle locking wrench | ||
| US2531285A (en) | 1948-03-08 | 1950-11-21 | Edward L Manspeaker | Wrench with self-adjusting jaws |
| US3229554A (en) | 1961-04-03 | 1966-01-18 | Arthur K Haddad | Quick-acting vice grips |
| GB1106726A (en) | 1966-05-02 | 1968-03-20 | Richard Payne | Improvements in drill chucks |
| US3600986A (en) | 1968-08-27 | 1971-08-24 | Leverage Tools Inc | Self-adjusting locking wrench |
| US3647231A (en) | 1970-02-13 | 1972-03-07 | Rohr Corp | Self-contained hydraulic system for fluid-actuated chuck |
| US3732026A (en) * | 1971-01-11 | 1973-05-08 | R Peters | Hand operated power tool and chuck therefor |
| US4297756A (en) | 1979-10-09 | 1981-11-03 | Lance Bruce J | Locking wrench tool with auxiliary mechanical output |
| DE3038637A1 (en) * | 1979-10-26 | 1981-05-07 | Micron, S.A., Montgat, Barcelona | DRILL CHUCK |
| US4407493A (en) | 1981-08-05 | 1983-10-04 | Carr Lane Mfg. Co. | Self-adjusting toggle clamps for factory fixtures and the like |
| DE3434076A1 (en) | 1984-09-17 | 1986-04-17 | Hilti Ag, Schaan | TOOL HOLDER FOR DRILLING AND CHISEL TOOLS |
| GB2173720A (en) | 1985-01-17 | 1986-10-22 | Roger David Harrison | Keyless chuck |
| ES2108610B1 (en) | 1994-07-22 | 1998-07-01 | Llambrich Precision S A | MACHINE TOOL CHUCKS. |
-
1999
- 1999-03-31 GB GBGB9907468.4A patent/GB9907468D0/en not_active Ceased
-
2000
- 2000-02-18 AT AT00301306T patent/ATE385447T1/en not_active IP Right Cessation
- 2000-02-18 EP EP00301306A patent/EP1043101B1/en not_active Expired - Lifetime
- 2000-02-18 DE DE60037950T patent/DE60037950T2/en not_active Expired - Lifetime
- 2000-02-22 CA CA002299093A patent/CA2299093C/en not_active Expired - Fee Related
- 2000-03-28 JP JP2000092986A patent/JP2000288810A/en not_active Withdrawn
- 2000-03-29 AU AU22663/00A patent/AU766214B2/en not_active Ceased
- 2000-03-29 US US09/538,435 patent/US6382636B1/en not_active Expired - Lifetime
- 2000-03-31 CN CNB001053647A patent/CN1168564C/en not_active Expired - Fee Related
-
2001
- 2001-06-08 HK HK01103958A patent/HK1033293A1/en not_active IP Right Cessation
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| BE457756A (en) * | ||||
| US3354759A (en) * | 1966-05-03 | 1967-11-28 | Thomas L Cook | Vise grip pliers |
| US4648608A (en) * | 1985-02-27 | 1987-03-10 | Black & Decker, Inc. | Low-cost, keyless chuck and method of manufacture |
| GB2199776A (en) * | 1986-12-31 | 1988-07-20 | Jacobs Mfg Co | Self tightening drill chuck |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7316404B1 (en) * | 2000-03-29 | 2008-01-08 | Black & Decker Inc. | Drill/driver chuck |
| DE10109490B4 (en) * | 2001-02-28 | 2006-08-10 | Metabowerke Gmbh | chuck |
| FR2907354A1 (en) * | 2006-10-24 | 2008-04-25 | Amyot Sa Sa Ets | Tool holder mandrel for e.g. drilling machine equipment, has lock washer buttressed on cylindrical part to avoid backward movement of bits, and projected part provided between ring and washer for realizing buttressing of washer |
| US8622401B2 (en) | 2009-02-27 | 2014-01-07 | Black & Decker Inc. | Bit retention device |
| US8800999B2 (en) | 2009-02-27 | 2014-08-12 | Black & Decker Inc. | Bit retention device |
| US9067266B2 (en) | 2009-02-27 | 2015-06-30 | Black & Decker Inc. | Bit retention device |
| US8381830B2 (en) | 2009-05-05 | 2013-02-26 | Black & Decker Inc. | Power tool with integrated bit retention device |
| US8820431B2 (en) | 2009-05-05 | 2014-09-02 | Black & Decker Inc. | Power tool with integrated bit retention device |
| US10702976B2 (en) | 2018-06-06 | 2020-07-07 | GCX Corporation | Pole clamp |
Also Published As
| Publication number | Publication date |
|---|---|
| ATE385447T1 (en) | 2008-02-15 |
| CA2299093C (en) | 2007-12-04 |
| DE60037950T2 (en) | 2009-02-05 |
| CA2299093A1 (en) | 2000-09-30 |
| EP1043101B1 (en) | 2008-02-06 |
| CN1168564C (en) | 2004-09-29 |
| EP1043101A3 (en) | 2003-07-23 |
| CN1276279A (en) | 2000-12-13 |
| US6382636B1 (en) | 2002-05-07 |
| HK1033293A1 (en) | 2001-08-24 |
| JP2000288810A (en) | 2000-10-17 |
| DE60037950D1 (en) | 2008-03-20 |
| AU2266300A (en) | 2000-10-05 |
| GB9907468D0 (en) | 1999-05-26 |
| AU766214B2 (en) | 2003-10-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CA2299093C (en) | Drill/driver chuck | |
| US7316404B1 (en) | Drill/driver chuck | |
| US6390481B1 (en) | Locking chuck | |
| EP0300375B2 (en) | Chuck for tools | |
| US7128324B2 (en) | Hammerlock chuck | |
| US6729812B2 (en) | Power driver having geared tool holder | |
| US6007071A (en) | Chuck with locking body | |
| US6722668B2 (en) | Chuck having quick change mechanism | |
| CA2299949C (en) | Drill/driver chuck | |
| US7900937B2 (en) | Locking chuck | |
| US5913524A (en) | Chuck with gripping mechanism stop | |
| WO2003015969A1 (en) | Chuck with one-way lock | |
| US5934689A (en) | Chuck having sleeve retaining nut | |
| US6402160B1 (en) | Chuck with improved bearing | |
| US20020163140A1 (en) | Chuck | |
| GB2275886A (en) | Drill chuck. | |
| GB2368545A (en) | Disk Driven Chuck |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AT BE CH CY DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE |
|
| AX | Request for extension of the european patent |
Free format text: AL;LT;LV;MK;RO;SI |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Designated state(s): AT BE CH CY DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE |
|
| AX | Request for extension of the european patent |
Extension state: AL LT LV MK RO SI |
|
| 17P | Request for examination filed |
Effective date: 20030805 |
|
| AKX | Designation fees paid |
Designated state(s): AT BE CH CY DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE |
|
| 17Q | First examination report despatched |
Effective date: 20040525 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| RTI1 | Title (correction) |
Free format text: DRILL-DRIVER CHUCK |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE CH CY DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| REF | Corresponds to: |
Ref document number: 60037950 Country of ref document: DE Date of ref document: 20080320 Kind code of ref document: P |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20080206 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20080517 |
|
| NLV1 | Nl: lapsed or annulled due to failure to fulfill the requirements of art. 29p and 29m of the patents act | ||
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20080206 |
|
| ET | Fr: translation filed | ||
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20080206 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20080228 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20080206 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20080707 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20080206 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20080229 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20080506 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20080229 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20081107 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20080218 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20080206 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20080206 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20080218 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20080507 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20130227 Year of fee payment: 14 Ref country code: DE Payment date: 20130227 Year of fee payment: 14 Ref country code: FR Payment date: 20130311 Year of fee payment: 14 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 60037950 Country of ref document: DE |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20140218 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20141031 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 60037950 Country of ref document: DE Effective date: 20140902 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20140902 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20140218 Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20140228 |