-
Die
vorliegende Erfindung bezieht sich auf Videocodier/Decodieralgorithmen
und insbesondere auf Videocodier/Decodieralgorithmen, die konform
zum internationalen Standard ISO/IEC 14496-10 sind, wobei dieser
Standard auch als H.264/AVC bezeichnet wird.
-
Der
Standard H.264/AVC ist Ergebnis eines Videostandardisierungs-Projekts
der ITU-T-Videocodier-Expertengruppe (VCEG) und der ISO/IEC-Bewegbild-Expertengruppe
(MPEG). Die Hauptziele dieses Standardisierungsvorhabens bestehen
darin, ein übersichtliches
Videocodier-Konzept mit sehr gutem Kompressionsverhalten zu schaffen,
und gleichzeitig eine Netzwerk-freundliche Videodarstellung zu erzeugen,
die sowohl Anwendungen mit "Konversationscharakter", wie beispielsweise
die Video-Telefonie, sowie Anwendungen ohne Konversationscharakter
(Speichern, Rundfunk, Stream-Übertragung)
umfassen.
-
Es
existiert neben dem oben-zitierten Standard ISO/IEC 14496-10 auch
eine Vielzahl von Publikationen die sich auf den Standard beziehen.
Lediglich beispielhaft wird auf "The
Emerging H.264-AVC Standard", Ralf
Schäfer,
Thomas Wiegand und Heiko Schwarz, EBU Technical Review, Januar 2003,
verwiesen. Zudem umfasst die Fachveröffentlichung "Overview of the H.264/AVC
Video Coding Standard",
Thomas Wiegand, Gary J. Sullivan, Gesle Bjontegaard und Ajay Lothra,
IEEE Transactions on Circuits and Systems for Video Technology,
July 2003, sowie die Fachveröffentlichung "Context-based adaptive
Binary Arithmethic Coding in the H.264/AVC Video Compression Standard", Detlev Marpe, Heiko
Schwarz und Thomas Wiegand, IEEE Transactions on Circuits and Systems
for Video Technology, September 2003, einen detaillierten Überblick
verschiedener Aspekte des Video-Codier-Standards.
-
Zum
besseren Verständnis
wird jedoch nachfolgend anhand der 9 bis 11 ein Überblick über den Videocodierer/Decodierer-Algorithmus
gegeben.
-
9 zeigt einen kompletten
Aufbau eines Videocodierers, welcher allgemein aus zwei unterschiedlichen
Stufen besteht. Allgemein gesagt, erzeugt die erste Stufe, die prinzipiell
Video-bezogen arbeitet, Ausgangsdaten, die schließlich von
einer zweiten Stufe, die in 9 mit 80 bezeichnet
ist, einer Entropy-Codierung (Entropy Coding) unterzogen werden.
Die Daten sind Daten 81a, quantisierte Transformations-Koeffizienten 81b sowie
Bewegungsdaten 81c, wobei diese Daten 81a, 81b, 81c dem
Entropie-Codierer 80 zugeführt werden, um ein codiertes
Videosignal am Ausgang des Entropie-Codierers 80 zu erzeugen.
-
Im
Einzelnen wird das Eingangsvideosignal (Input Video Signal) in Makroblöcke aufgeteilt,
bzw. gesplittet, wobei jeder Makroblock 16 × 16 Pixel hat. Dann wird die
Zuordnung der Makroblöcke
zu Slice-Gruppen und Slices (slice = Scheibe) ausgewählt, wonach
jeder Makroblock jedes Slices durch das Netz von Betriebsblöcken, wie
sie in 8 gezeigt sind,
verarbeitet wird. Es sei darauf hingewiesen, dass eine effiziente
Parallel-Verarbeitung von Makroblöcken möglich ist, wenn verschiedene
Slices in einem Videobild sind. Die Zuordnung der Makroblöcke zu Slice-Gruppen
und Slices wird mittels eines Blocks Codiersteuerung (Coder Control) 82 in 8 durchgeführt. Es
existieren verschiedene Slices, die folgendermaßen definiert sind:
I-Slice:
Der I-Slice ist ein Slice, in dem alle Makroblöcke des Slices unter Verwendung
einer Intra-Prediction codiert werden.
P-Slice: Zusätzlich zu
dem Codiertypen des I-Slices können
bestimmte Makroblöcke
des P-Slices ebenfalls unter Verwendung einer Inter-Prädiktion
mit zumindest einem Bewegungs-Kompensierten-Prädiktionssignal (Motion
Compensated Prediction Signal) pro Prädiktionsblock codiert werden.
B-Slice:
Zusätzlich
zu den Codiertypen, die im P-Slice verfügbar sind, können bestimmte
Makroblöcke
des B-Slices ebenfalls unter Verwendung einer Inter-Prädiktion
mit zwei Bewegungs-Kompensierten-Prädiktionssignalen pro Prädiktionsblock
codiert werden.
-
Die
obigen drei Codiertypen sind sehr ähnlich zu denen in früheren Standards,
jedoch mit der Ausnahme der Verwendung von Referenzbildern, wie
es nachfolgend beschrieben wird. Die folgenden zwei Codiertypen
für Slices
sind im Standard H.264/AVC neu:
SP-Slice: Er wird auch als
Schalt-P-Slice bezeichnet, der so codiert wird, dass ein effizientes
Umschalten zwischen unterschiedlichen vorkodierten Bildern möglich wird.
SI-Slice:
Der SI-Slice wird auch als Schalt-I-Slice bezeichnet, der eine genaue
Anpassung des Makroblocks in einem SP-Slice für einen direkten beliebigen
Zugriff und für
Fehler-Wiederherstellungszwecke erlaubt.
-
Insgesamt
sind Slices eine Sequenz von Makroblöcken, die in der Reihenfolge
eines Raster-Scans verarbeitet werden, wenn nicht eine ebenfalls
im Standard definierte Eigenschaft der flexiblen Makroblock-Anordnung
FMO (FMO = Flexible Macro Block Ordering) verwendet wird. Ein Bild
kann in einen oder mehrere Slices aufgeteilt werden, wie es in 11 dargestellt ist. Ein
Bild ist daher eine Sammlung von einem oder mehreren Slices. Slices
sind in dem Sinn selbständig
voneinander, da ihre Syntaxelemente aus dem Bitstrom analysiert
(geparst) werden können,
wobei die Werte der Abtastwerte in dem Bereich des Bildes, der durch den
Slice darge stellt wird, korrekt decodiert werden können, ohne
dass Daten von anderen Slices benötigt werden, vorausgesetzt,
dass verwendete Referenzbilder sowohl im Codierer als auch im Decodierer
identisch sind. Bestimmte Informationen von anderen Slices können jedoch
nötig sein,
um das Deblocking-Filter über Slice-Grenzen
hinweg anzuwenden.
-
Die
FMO-Eigenschaft modifiziert die Art und Weise, wie Bilder in Slices
und Makroblöcke
partitioniert werden, indem das Konzept der Slice-Gruppen verwendet
wird. Jede Slice-Gruppe
ist ein Satz von Makroblöcken,
die durch eine Makroblock-zu-Slice-Gruppen-Abbildung definiert ist,
die durch den Inhalt eines Bildparametersatzes und durch bestimmte
Informationen von Slice-Headern spezifiziert ist. Diese Makroblock-zu-Slice-Gruppen-Abbildung
besteht aus einer Slice-Gruppen-Identifikationszahl für jeden
Makroblock in dem Bild, wobei spezifiziert wird, zu welcher Slice-Gruppe
der zugeordnete Makroblock gehört.
Jede Slice-Gruppe kann in eine oder mehrere Slices partitioniert
werden, so dass ein Slice eine Sequenz von Makroblöcken innerhalb
derselben Slice-Gruppe hat, die in der Reihenfolge einer Rasterabtastung
innerhalb des Satzes von Makroblöcken
einer speziellen Slice-Gruppe verarbeitet wird.
-
Jeder
Makroblock kann in einem von mehreren Codiertypen abhängig von
dem Slice-Codiertyp übertragen
werden. In all den Slice-Codiertypen werden die folgenden Typen
einer Intra-Codierung unterstützt,
die als intra-4×4 oder intra- 16×16 bezeichnet
werden, wobei zusätzlich
ein Chroma-Prädiktions-Modus
und auch ein I-PCM Prädiktionsmodus unterstützt werden.
-
Der
intra-4×4 Modus
basiert auf der Prädiktion
von jedem 4×4
Chroma-Block separat und ist gut geeignet zum Codieren von Teilen
eines Bildes mit herausragenden Details. Der intra- 16×16-Modus
führt auf
der anderen Seite eine Prädiktion
des gesamten 16×16-Chroma-Blocks
durch und ist mehr geeignet zum Codieren von "weichen" Bereichen eines Bildes.
-
Zusätzlich zu
diesen zwei Chroma-Prädiktions-Typen
wird eine getrennte Chroma-Prädiktion
durchgeführt.
Als Alternative für
intra-4×4 und
intra-16×16 erlaubt
der I-4×4-Codiertyp,
dass der Codierer einfach die Prädiktion
sowie die Transformationscodierung überspringt und statt dessen
die Werte der codierten Abtastwerte direkt überträgt. Der I-PCM-Modus
dient den folgenden Zwecken: Er ermöglicht es dem Codierer, die
Werte der Abtastwerte präzise
darzustellen. Er liefert eine Art und Weise, um die Werte von sehr
anormalem Bildinhalt ohne Datenvergrößerung genau darzustellen.
Er ermöglicht
es ferner, für
die Anzahl von Bits eine harte Grenze vorzugeben, die ein Codierer
für eine
Makroblockhandhabung haben muss, ohne dass die Codiereffizienz leidet.
-
Im
Gegensatz zu früheren
Videocodierstandards (nämlich
H.263 plus und MPEG-4 Visual), wo die Intra-Prädiktion im Transformationsbereich
durchgeführt
worden ist, wird die Intra-Prädiktion
bei H.264/AVC immer im Raumbereich (Spatial Domain) durchgeführt, und
zwar indem auf benachbarte Abtastwerte von vorher codierten Blöcken bezug
genommen wird, die links, bzw. oberhalb des zu prädizierenden
Blocks liegen (10).
Dies kann in bestimmten Umgebungen, bei denen Übertragungsfehler auftreten,
eine Fehlerfortpflanzung mit sich bringen, wobei diese Fehlerfortpflanzung
aufgrund der Bewegungskompensation (Motion Compensation) in intercodierten
Makroblöcken
stattfindet. Daher kann ein begrenzter Intra-Codiermodus signalisiert
werden, der eine Prädiktion
nur von intra-codierten benachbarten Makroblöcken ermöglicht.
-
Wenn
der intra-4×4-Modus
verwendet wird, wird jeder 4×4-Block aus räumlich benachbarten
Abtastwerten vorhergesagt. Die 16 Abtastwerte des 4×4-Blocks
werden unter Verwendung von vorher decodierten Abtastwerten in benachbarten
Blöcken
vorhergesagt. Für
jeden 4×4-Block
kann einer von 9 Prädiktionsmodi
verwendet werden. Zusätzlich
zur "DC-Prädiktion
(wo ein Wert verwendet wird, um den gesamten 4×4-Block vor her zu sagen),
werden 8 Richtungs-Prädiktions-Modi
spezifiziert. Diese Modi sind geeignet, um Richtungsstrukturen in
einem Bild, wie beispielsweise Kanten bei verschiedenen Winkeln
vorherzusagen.
-
Zusätzlich zu
den Intra-Makroblock-Codiertypen werden verschiedene prädiktive
oder bewegungs-kompensierte Codiertypen als P-Makroblocktypen spezifiziert.
Jeder P-Makroblock-Typ
entspricht einer spezifischen Aufteilung des Makroblocks in die
Blockformen, die für
eine bewegungskompensierte Prädiktion verwendet
werden. Aufteilungen mit Luma-Blockgrössen von 16×16, 16×8, 8×16 und 8×8 Abtastwerten werden durch
die Syntax unterstützt.
Im Falle von Aufteilungen von 8×8
Abtastwerten wird ein zusätzliches
Syntaxelement für
jede 8×8-Aufteilung übertragen.
Dieses Syntaxelement spezifiziert, ob die entsprechende 8×8-Aufteilung ferner
in Aufteilungen von 8×4,
4×8 oder
4×4 Luma-Abtastwerten
und entsprechenden Chroma-Abtastwerten weiter partitioniert wird.
-
Das
Prädiktionssignal
für jeden
prädiktiv-codierten
M×M-Lumablock wird erhalten,
indem ein Bereich des entsprechenden Referenzbildes, der durch einen
Translations-Bewegungsvektor
und einen Bildreferenzindex spezifiziert ist, verschoben wird. Wenn
somit ein Makroblock unter Verwendung von vier 8×8-Aufteilungen codiert wird,
und wenn jede 8×8-Aufteilung
ferner in vier 4×4-Aufteilungen
aufgeteilt wird, kann eine maximale Menge an 16 Bewegungsvektoren
für einen
einzigen P-Makroblock im Rahmen des sogenannten Bewegungsfelds bzw.
Motion Field übertragen
werden.
-
Der
Quantisierungsparameter-Slice QP wird verwendet, um die Quantisierung
der Transformationskoeffizienten bei H.264/AVC festzulegen. Der
Parameter kann 52 Werte annehmen. Diese Werte sind so angeordnet,
dass eine Zunahme von 1 im Hinblick auf den Quantisierungsparameter
eine Erhöhung
der Quantisierung schrittweise um etwa 12 % bedeutet. Dies bedeutet,
dass eine Erhöhung
des Quantisierungsparameters um 6 eine Zunahme der Quantisierer-Schrittweite
um genau einen Faktor von 2 mit sich bringt. Es sei darauf hingewiesen,
dass eine Änderung
der Schrittgröße um etwa
12 % ebenfalls in etwa eine Reduktion der Bitrate um etwa 12 % bedeutet.
-
Die
quantisierten Transformationskoeffizienten eines Blocks werden allgemein
in einem Zick-Zack-Weg abgetastet und unter Verwendung von Entropie-Codierverfahren
weiter verarbeitet. Die 2×2-DC-Koeffizienten
der Chroma-Komponente werden in Raster-Scan-Reihenfolge abgetastet
und alle Invers-Transformations-Operationen
innerhalb H.264/AVC können
unter Verwendung von nur Additionen und Shift-Operationen von 16-Bit-Ganzzahlwerten
implementiert werden. Auf ähnliche
Art und Weise werden nur 16-Bit-Speicherzugriffe für eine gute
Implementierung der Vorwärtstransformationen
und des Quantisierverfahrens im Codierer benötigt.
-
Bezugnehmend
auf 9 wird das Eingangsbild
zunächst
Bild für
Bild in einer Videosequenz, jeweils für jedes Bild gesehen, in die
Makroblöcke
mit 16×16
Pixeln aufteilt. Hierauf wird jedes Bild einem Subtrahierer 84 zugeführt, der
das ursprüngliche
Bild von einem Bild subtrahiert, das von einem Decodierer 85 geliefert wird,
der im Encodierer enthalten ist. Das Subtraktionsergebnis, also
die Restsignale im Raum-Bereich (Spatial Domain), werden nunmehr
transformiert, skaliert und quantisiert (Block 86), um
die quantisierten Transformationskoeffizienten auf der Leitung 81b zu
erhalten. Zur Erzeugung des Subtraktionssignals, das in den Subtrahierer 84 eingespeist
wird, werden die quantisierten Transformationskoeffizienten zunächst wieder
skaliert und invers transformiert (Block 87), um einem
Addierer 88 zugeführt
zu werden, dessen Ausgang das Deblocking-Filter 89 speist,
wobei am Ausgang des Deblocking-Filters das Ausgangsvideosignal,
wie es z.B. ein Decodierer decodieren wird, z.B. zu Kontrollzwecken überwacht
werden kann (Ausgang 90).
-
Unter
Verwendung des decodierten Ausgangssignals am Ausgang 90 wird
dann eine Bewegungsschätzung
(Motion Estimation) in einem Block 91 durchgeführt. Zur
Bewegungsschätzung
in Block 91 wird, wie es aus 9 ersichtlich
ist, ein Bild des ursprünglichen
Input-Videosignals zugeführt.
Der Standard erlaubt zwei verschiedene Bewegungsschätzungen,
nämlich
eine Vorwärts-Bewegungs-Schätzung und
eine Rückwärts-Bewegungs-Schätzung. Bei
der Vorwärts-Bewegungs-Schätzung wird
die Bewegung des aktuellen Bilds im Hinblick auf das vorhergehende
Bild abgeschätzt.
Dagegen wird bei der Rückwärts-Bewegungs-Schätzung die
Bewegung des vergangenen Bilds unter Verwendung des aktuellen Bilds
abgeschätzt. Die
Ergebnisse der Bewegungsschätzung
(Block 91) werden einem Bewegungskompensations-Block (Motion Compensation) 92 zugeführt, der
insbesondere dann, wenn ein Schalter 93 auf den Inter-Prädiktions-Modus geschaltet
ist, wie es in 9 der
Fall ist, eine bewegungs-kompensierte Inter-Prädiktion durchführt. Steht
der Schalter 93 dagegen auf Intea-Frame-Prädiktion,
so wird eine Intra-Frame-Prädiktion
unter Verwendung eines Blocks 490 durchgeführt. Hierzu
werden die Bewegungsdaten nicht benötigt, da für eine Intea-Frame-Prädiktion
keine Bewegungskompensation ausgeführt wird.
-
Der
Bewegungsschätzungsblock 91 erzeugt
Bewegungsdaten bzw. Bewegungsfelder, wobei Bewegungsdaten bzw. Bewegungsfelder,
die aus Bewegungsvektoren (Motion Vectors) bestehen, vom Decodierer übertragen
werden, damit eine entsprechende inverse Prädiktion, also Rekonstruktion
unter Verwendung der Transformationskoeffizienten und der Bewegungsdaten
durchgeführt
werden kann. Es sei darauf hingewiesen, dass im Falle einer Vorwärts-Prädiktion
der Bewegungsvektor aus dem unmittelbar vorhergehenden Bild bzw. auch
aus mehreren vorhergehenden Bildern berechnet werden kann. Darüber hinaus
sei darauf hingewiesen, dass im Falle einer Rückwärts-Prädiktion
ein aktuelles Bild unter Verwendung des unmittelbar angrenzenden zukünftigen
Bildes und natürlich
auch unter Verwendung von weiteren zukünftigen Bildern berechnet werden kann.
-
Nachteilig
an dem in 9 dargestellten
Videocodierer-Konzept
ist dass es keine einfache Skalierbarkeitsmöglichkeit bietet. Wie es in
der Technik bekannt ist, versteht man unter dem Ausdruck "Skalierbarkeit" ein Codierer/Decodier-Konzept,
bei dem der Codierer einen skalierten Datenstrom liefert. Der skalierte
Datenstrom umfasst eine Basis-Skalierungsschicht sowie eine oder
mehrere Erweiterungs-Skalierungsschichten. Die Basis-Skalierungsschicht
umfasst eine Darstellung des zu codierenden Signals allgemein gesagt
mit geringerer Qualität,
jedoch auch mit geringerer Datenrate. Die Erweiterungs-Skalierungsschicht
enthält
eine weitere Darstellung des Videosignals, die typischerweise zusammen
mit der Darstellung des Videosignals in der Basis-Skalierungsschicht
eine Darstellung mit verbesserter Qualität im Hinblick auf die Basis-Skalierungsschicht
liefert. Dagegen hat die Erweiterungs-Skalierungsschicht selbstverständlich einen
eigenen Bitbedarf, so dass die Anzahl der Bits zur Darstellung des
zu codierenden Signals mit jeder Erweiterungsschicht zunimmt.
-
Ein
Decodierer wird je nach Ausgestaltung bzw. nach Möglichkeit
entweder nur die Basis-Skalierungschicht decodieren, um eine vergleichsweise
qualitativ schlechte Darstellung des durch das codierte Signal dargestellten
Bildssignals zu liefern. Mit jeder "Hinzunahme" einer weiteren Skalierungsschicht kann
der Decodierer jedoch schrittweise die Qualität des Signals (zu Lasten der
Bitrate und der Verzögerung)
verbessern.
-
Je
nach Implementierung und nach Übertragungskanal
von einem Codierer zu einem Decodierer wird immer wenigstens die
Basis-Skalierungsschicht übertragen,
da die Bitrate der Basis-Skalierungsschicht typischerweise so gering
ist, dass auch ein bisher begrenzter Übertragungskanal ausreichend
sein wird. Erlaubt der Übertragungskanal
nicht mehr Bandbreite für
die Anwendung, so wird nur die Basis-Skalierungsschicht, nicht aber eine
Erweiterungs- Skalierungsschicht übertragen.
Dies hat zur Folge, dass der Decodierer lediglich eine niederqualitative
Darstellung des Bildsignals erzeugen kann. Im Vergleich zum unskalierten
Fall, bei dem die Datenrate so hoch gewesen wäre, dass eine Übertragung
das Übertragungssystem überhaupt
nicht möglich
gewesen wäre,
ist die niederqualitative Darstellung von Vorteil. Erlaubt der Übertragungskanal
die Übertragung
von einer oder mehrerer Erweiterungsschichten, so wird der Codierer
auch eine oder mehrere Erweiterungsschichten zum Decodierer übertragen,
so dass dieser je nach Anforderung schrittweise die Qualität des ausgegebenen
Videosignals erhöhen
kann.
-
Im
Hinblick auf die Codierung von Videosequenzen kann man zwei unterschiedliche
Skalierungen unterscheiden. Die eine Skalierung ist die zeitliche
Skalierung, dahingehend, dass z.B. nicht alle Video-Einzelbilder
einer Videosequenz übertragen
werden, sondern dass – zur
Reduzierung der Datenrate – beispielsweise nur
jedes zweite Bild, jedes dritte Bild, jedes vierte Bild, etc. übertragen
wird.
-
Die
andere Skalierung ist die SNR-Skalierbarkeit (SNR = Signal to Noise
Ratio), bei der jede Skalierungsschicht, also sowohl die Basis-Skalierungsschicht
als auch die erste, zweite, dritte... Erweiterungs-Skalierungsschicht
sämtliche
zeitlichen Information umfasst, jedoch mit einer unterschiedlichen
Qualität.
So hätte die
Basis-Skalierungsschicht
zwar eine niedrige Datenrate, jedoch ein geringes Signal/Rausch-Verhältnis, wobei
dieses Signal/Rausch-Verhältnis
dann, mit Hinzunahme jeweils einer Erweiterungs-Skalierungsschicht schrittweise
verbessert werden kann.
-
Das
in 9 dargestellte Codierer-Konzept
ist dahingehend problematisch, dass es darauf basiert, dass lediglich
Restwerte durch den Subtrahierer 84 erzeugt werden, und
dann weiter verarbeitet werden. Diese Restwerte werden aufgrund
von Prädiktionsalgorithmen
berechnet, und zwar in der in
-
9 gezeigten Anordnung, die
unter Verwendung der Blöcke 86, 87, 88, 89, 92, 93, 94 und 84 eine geschlossene
Schleife bildet, wobei in der geschlossenen Schleife ein Quantisierungs-Parameter
eingeht, und zwar in den Blöcken 86, 87.
Würde nunmehr
eine einfache SNR-Skalierbarkeit dahingehend implementiert werden,
dass z.B. jedes prädizierte
Restsignal zunächst
mit einer groben Quantisierer-Schrittweite quantisiert wird, und
dann, schrittweise, unter Verwendung von Erweiterungsschichten mit
feineren Quantisierungs-Schrittweiten
quantisiert werden würde,
so würde
dies folgende Konsequenzen haben. Aufgrund der inversen Quantisierung
und der Prädiktion
insbesondere im Hinblick auf die Bewegungsschätzung (Block 91) und
die Bewegungskompensation (Block 92), die unter Verwendung
des ursprünglichen
Bildes einerseits und des quantisierten Bildes andererseits stattfinden,
ergibt sich ein "Auseinanderlaufen" der Quantisierungs-Schrittweiten" sowohl im Encodierer
als auch im Decodierer. Dies führt
dazu, dass die Erzeugung der Erweiterungs-Skalierungsschichten auf
Encoder-Seite sehr problematisch wird. Ferner wird die Verarbeitung der
Erweiterungs-Skalierungsschichten
auf der Decodiererseite zumindest im Hinblick auf die im Standard H.264/AVC
definierten Elemente unmöglich.
Grund hierfür
ist die anhand von 9 dargestellte
geschlossene Schleife im Video-Encodierer, in der die Quantisierung
enthalten ist.
-
Das
derzeit standardisierte Codierer/Decodierer-Konzept ist somit im
Hinblick auf den Skalierbarkeitsgedanken wenig flexibel.
-
Die
Aufgabe der vorliegenden Erfindung besteht darin, ein flexibleres
Konzept zum Codieren/Decodieren von Bildsignalen zu schaffen.
-
Diese
Aufgabe wird durch eine Vorrichtung zum Codieren einer Gruppe von
aufeinander folgenden Bildern gemäß Patentanspruch 1, eine Vorrichtung
zum Decodieren eines codierten Signals gemäß Patentanspruch 17, ein Verfahren
zum Codieren einer Gruppe von aufeinander folgenden Bildern gemäß Patentanspruch
20, ein Verfahren zum Decodieren eines Bildsignals gemäß Patentanspruch
21, eine Filtervorrichtung gemäß Patentanspruch
22, eine Invers-Filtervorrichtung gemäß Patentanspruch 23, ein Verfahren
zum Filtern gemäß Patentanspruch
24, ein Verfahren zum Invers-Filtern gemäß Patentanspruch 25 oder ein
Computer-Programm gemäß Patentanspruch
26 gelöst.
-
Der
vorliegenden Erfindung liegt die Erkenntnis zugrunde, dass die im
Hinblick auf den Skalierbarkeitsgedanken problematische geschlossene
Schleife im Video-Encodierer dadurch durchbrochen werden kann, dass
einerseits von der Einzelbild-weisen Bildverarbeitung weggegangen
wird und statt dessen eine Verarbeitung von Bildern gruppenweise
durchgeführt
wird. Die Gruppe von Bildern wird unter Verwendung eines Lifting-Schemas
unter Verwendung von mehreren Filterebenen jeweils in Hochpaßbilder
und Tiefpassbilder zerlegt, um dann nicht mehr Restsignale einzelner
Bilder, wie im bekannten Standard, sondern Hochpaßbilder bzw.
Tiefpassbilder zu transformieren, zu skalieren, zu quantisieren
und dann einer Entropie-Codierung zuzuführen. Im Videocodierer wird
somit gewissermaßen
eine Subband-Filterbank vorzugsweise implementiert als Wavelet-Filter
vorgeschaltet, wobei die Filterzerlegung die geschlossene Schleife
des standardisierten Decodierers durchbricht, so dass eine zeitliche
oder SNR-Skalierbarkeit einfach implementierbar ist. Es werden nicht
mehr Restsignale in räumlicher
Hinsicht weiterverarbeitet, also transformiert, skaliert, quantisiert
und dann entropie-codiert, sondern Restsignale, also Hochpass-Signale
in zeitlicher Hinsicht, da eine Hochpass-Tiefpass-Filterung durch
die verschiedenen Filterebenen in zeitlicher Hinsicht, also über die
Gruppe von Bildern betrachtet, durchgeführt wird.
-
Die
vorliegende Erfindung liefert somit vorzugsweise eine SNR-skalierbare
Erweiterung des H.264/AVC-Videostandard. Zu diesem Zweck, also um
eine effiziente SNR-skalierbare Bit stromdarstellung einer Videosequenz
zu erreichen, wird die zeitliche Abhängigkeit zwischen Bildern unter
Verwendung eines Subband-Lösungsansatzes,
der mit offener Schleife, also ohne die problematische geschlossene
Schleife auskommt, codiert. In diesem Codierer/Decodierer-Scenario
werden die meisten Komponenten von H.264/AVC wie im Standard spezifiziert
verwendet, wobei nur wenig Änderungen
im Hinblick auf die Subband-Codierer-Struktur benötigt werden.
-
Bei
einem bevorzugten Ausführungsbeispiel
der vorliegenden Erfindung umfasst jede Filterebene einen Rückwärts-Prädiktor einerseits
sowie einen Vorwärts-Prädiktor andererseits.
Der Rückwärts-Prädiktor führt eine
Rückwärts-Bewegungs-Kompensation
(Backward Motion Compensation) durch. Der Vorwärts-Prädiktor führt eine Vorwärts-Bewegungskompensation
durch. Das Ausgangssignal des Rückwärts-Prädiktors wird
von einem Bild der ursprünglichen
Gruppe von Bildern subtrahiert, um ein Hochpass-Bild zu erhalten.
Das Hochpass-Bild wird dem Vorwärts-Prädiktor als
Eingangssignal zugeführt,
um ausgangsseitig ein vorwärtsprädiziertes
Signal zu erhalten, das dem Bildsignal, das das andere Bild darstellt,
hinzu addiert wird, um ein Tiefpass-Bild zu erhalten, das dann,
mittels einer niedrigeren Filterebene wieder in ein Hochpass-Signal
und ein Tiefpass-Signal
zerlegt wird, wobei das Tiefpass-Signal die Gemeinsamkeiten von
zwei betrachteten Bildern umfasst, während das Hochpass-Signal die
Unterschiede von zwei betrachteten Bildern umfasst.
-
Eine
Filterebene benötigt
zumindest die Verarbeitung einer Gruppe von zwei Bildern. Existieren
mehrere Filterebenen, so wird beispielsweise dann, wenn zwei Filterebenen
verwendet werden, eine Gruppierung von vier Bildern benötigt. Existieren
drei Filterebenen, so wird eine Gruppierung von acht Bildern benötigt. Existieren
dagegen vier Filterebenen, so sollten 16 Bilder in eine Gruppe von
Bildern gruppiert werden und gemeinsam verarbeitet werden. Es sei
darauf hingewiesen, dass die Gruppe von Bildern beliebig groß gewählt werden kann,
dass jedoch eine Gruppe mit zumindest zwei Filterebenen zumindest
vier Bilder umfassen sollte. Je nach Anwendung werden hohe Gruppengrößen bevorzugt,
wobei jedoch dann entsprechend größere Subband-Filterbanken zur
Zerlegung auf Codiererseite und zur Zusammensetzung auf Decodiererseite
nötig sind.
-
Erfindungsgemäß wird somit
vor der eigentlichen Videocodierung gemäß dem Standard H.264/AVC eine
zeitliche Subband-Codierung
der Videosequenzen vorgenommen, so dass die Quantisierung unter
Verwendung einer Quantisierungs-Schrittweite
aus der in 9 dargestellten
geschlossenen Schleife herausgenommen wird, dahingehend, dass nunmehr
eine einfache SNR-Skalierbarkeit erreichbar ist. Nunmehr können einzelne
Skalierungsschichten ohne weiteres unter Verwendung einzelner unterschiedlicher
Quantisierer-Schrittweiten
erzeugt werden. Die erfindungsgemäße Zerlegung basiert auf der
Lifting-Darstellung einer Filterbank. Diese Lifting-Darstellung
der zeitlichen Subband-Zerlegungen
erlaubt die Verwendung von bekannten Verfahren zur Bewegungs-kompensierten
Prädiktion.
Darüber
hinaus können
die meisten anderen Komponenten eines hybriden Videocodierers, wie
beispielsweise H.264/AVC, ohne Modifikation verwendet werden, während nur
ein paar wenige Teile verändert
werden müssen.
-
Bevorzugte
Ausführungsbeispiele
der vorliegenden Erfindung werden nachfolgend bezugnehmend auf die
beiliegenden Zeichnungen detailliert erörtert. Es zeigen:
-
1 ein Blockschaltbild eines
erfindungsgemäßen Codierers
zum Codieren einer Gruppe von aufeinander folgenden Bildern;
-
2 ein Blockschaltbild eines
erfindungsgemäßen Decodierers
zum Decodieren eines Bildsignals;
-
3 ein Blockschaltbild eines
erfindungsgemäßen Decodierers
gemäß einem
bevorzugten Ausführungsbeispiel
der vorliegenden Erfindung mit vier Ebenen;
-
4 ein Blockschaltbild zur
Veranschaulichung der Lifting-Zerlegung einer zeitlichen Subband-Filterbank;
-
5 ein Blockschaltbild zur
Veranschaulichung der Zeit-Skalierung;
-
6 ein Blockschaltbild zur
Veranschaulichung der SNR-Skalierung;
-
7 ein Übersichtsdiagramm zur Veranschaulichung
der zeitlichen Verlegung einer Gruppe von beispielsweise 8 Bildern;
-
8 eine bevorzugte zeitliche
Plazierung von Tiefpass-Bildern für eine Gruppe von 16 Bildern;
-
9 ein Übersichts-Blockschaltbild zur
Veranschaulichung der grundsätzlichen
Codierstruktur für
einen Codierer gemäß dem Standard
H.264/AVC für
einen Makroblock;
-
10 eine Kontext-Anordnung,
die aus zwei benachbarten Pixelelementen A und B links bzw. oberhalb
eines gegenwärtigen
Syntaxelements C besteht; und
-
11 eine Darstellung der
Aufteilung eines Bildes in Slices.
-
1 zeigt eine Vorrichtung
zum Codieren einer Gruppe von aufeinanderfolgenden Bildern, wobei
die Gruppe wenigstens ein erstes, zweites, drittes und viertes Bild
aufweist. Die Gruppe von Bildern wird in einen Eingang 10 einer
zweiten Filterebene 12 eingespeist. Die zweite Filterebene
ist ausgebildet, um aus der Gruppe von Bildern Hochpass-Bilder an
einem ersten Ausgang 14 und Tiefpass-Bilder an einem zweiten
Ausgang 16 der Filterebene 12 zu erzeugen. Im
einzelnen ist die zweite Filterebene 12 ausgebildet, um
ein erstes Hochpass-Bild der zweiten Ebene und ein erstes Tiefpass-Bild der zweiten
Ebene aus dem ersten und zweiten Bild der Gruppe von Bildern und
ein zweites Hochpass-Bild der zweiten Ebene und ein zweites Tiefpass-Bild
der zweiten Ebene aus dem dritten und vierten Bild der Gruppe von
Bildern zu erzeugen.
-
Bei
dem beispielhaft beschriebenen Fall, bei dem die Gruppe von Bildern
vier Bilder hat, erzeugt die zweite Filterebene 12 somit
ausgangsseitig am Hochpass-Ausgang 14 zwei Hochpass-Bilder
der zweiten Ebene, und erzeugt ausgangsseitig am Tiefpassausgang 16 zwei
Tiefpass-Bilder der zweiten Ebene. Optional werden die Hochpass-Bilder
der zweiten Ebene einer zweiten Weiterverarbeitungseinrichtung zugeführt. Die
zweite Weiterverarbeitungseinrichtung ist ausgebildet, um das erste
Hochpass-Bild der zweiten Ebene sowie das zweite Hochpass-Bild der
zweiten Ebene weiterzuverarbeiten, wobei die zweite Weiterverarbeitungseinrichtung 18 einen
Quantisierer umfasst, der eine Quantisierungs-Schrittweite (QP)
umfasst. Beispielhaft ist die zweite Weiterverarbeitungseinrichtung 18 ausgebildet,
um die Funktionalitäten
der Blöcke 86, 80 von 9 durchzuführen. Das
Ausgangssignal der zweiten Weiterverarbeitungseinrichtung, also
eine quantisierte und gegebenenfalls entropie-codierte Darstellung
der Hochpass-Bilder der zweiten Ebene wird im Falle einer SNR-Skalierbarkeit
in den ausgangsseitigen Bitstrom geschrieben.
-
Im
Falle einer Zeit-Skalierbarkeit wird dieses Signal bereits die erste
Erweitungs-Skalierungsschicht dar. Erzeugt ein Encodierer lediglich
eine Basis-Skalierungsschicht, so wird keine Weiterverarbeitung
der Hochpass-Bilder nötig sein,
weshalb die Verbindung zwischen dem Block 12 und dem Block 18 gestrichelt
eingezeichnet ist.
-
Die
beiden Tiefpass-Bilder der zweiten Ebene, die an dem Tiefpass-Ausgang 16 der
zweiten Filterebene ausgegeben werden, werden in einen Eingang einer
ersten Filterebene 20 eingespeist. Die erste Filterebene 20 ist
ausgebildet, um ein erstes Hochpass-Bild der ersten Ebene und ein
erstes Tiefpass-Bild der ersten Ebene aus dem ersten und dem zweiten
Tiefpass-Bild der zweiten Ebene zu erzeugen. Das erste Hochpass-Bild
der ersten Ebene, das durch die Filterebene 20 erzeugt
wird, wird an einem Hochpass-Ausgang 22 der ersten Filterebene
ausgegeben. Das erste Tiefpass-Bild der ersten Ebene wird an einem
Tiefpass-Ausgang 24 der ersten Filterebene ausgegeben.
-
Beide
Signale werden in einer ersten Weiterverarbeitungseinrichtung zur
Weiterverarbeitung des ersten Hochpass-Bildes der ersten Ebene und
des ersten Tiefpass-Bilds der ersten Ebene eingespeist, um an einem
Ausgang 28 ein codiertes Bildsignal zu erhalten, wobei
die erste Weiterverarbeitungseinrichtung 26, wie es bereits
anhand von der zweiten Weiterverarbeitungseinrichtung 18 dargestellt
worden ist, einen Quantisierer umfasst, der eine Quantisierer-Schrittweite hat.
Vorzugsweise sind die Quantisierer-Schrittweiten der zweiten Weiterverarbeitungseinrichtung 18 und
der ersten Weiterverarbeitungseinrichtung 26 identisch.
-
Das
Ausgangssignal der ersten Weiterverarbeitungseinrichtung 26 umfasst
somit das Hochpass-Bild der ersten Ebene und das Tiefpass-Bild der
ersten Ebene und stellt somit im Sinne einer zeitlichen Skalierbarkeit
die Basis-Skalierungsschicht
dar.
-
Im
Sinne einer SNR-Skalierbarkeit stellt das codierte Bildsignal am
Ausgang 28 zusammen mit den kodierten Hochpassbildern der
zweiten Ebene am Ausgang der zweiten Weiterver arbeitungseinrichtung 18 das
Ausgangssignal dar, das eine Basis-Skalierungsschicht ist.
-
2 zeigt eine Vorrichtung
zum Dekodieren eines kodierten Signals, und zwar des Signals, das
an dem Ausgang 28 von 1 als
codiertes Bildsignal ausgegeben wird. Wie es ausgeführt worden
ist, umfasst das codierte Bildsignal am Ausgang 28 eine
quantisierte und entropie-kopierte Darstellung des ersten Hochpass-Bildes
und des ersten Tiefpass-Bildes der ersten Ebene. Diese Informationen,
also das Signal an dem Ausgang 28 wird in eine Invers-Weiterverarbeitungseinrichtung 30 eingespeist,
die unter Verwendung und Kenntnis der von der ersten Weiterverarbeitungseinrichtung 26 von 6 benutzten Quantisierungs-Schrittweite eine
Invers-Weiterverarbeitung durchführt,
wobei diese Invers-Weiterverarbeitung zum Beispiel eine Entropie-Decodierung,
eine inverse Quantisierung sowie eine Rücktransformation etc. umfassen
wird, wie es in der Technik bekannt ist, und wie es durch einen
Codierer bzw. die im Codierer verwendete Weiterverarbeitungseinrichtung
vorgegeben ist.
-
An
einem Ausgang der Invers-Weiterverarbeitungseinrichtung 30 liegt
dann eine rekonstruierte Version des ersten Hochpass-Bildes sowie
eine rekonstruierte Version des ersten Tiefpass-Bildes vor. Diese
beiden rekonstruierten Versionen des ersten Hochpass-Bildes und
des ersten Tiefpass-Bildes werden in eine Invers-Filterebene 32 eingespeist,
wobei die Invers-Filterebene 32 ausgebildet ist, um die
rekonstruierte Version des ersten Hochpass-Bildes und die rekonstruierte
Version des ersten Tiefpass-Bildes invers zu filtern, um eine rekonstruierte
Version eines ersten Tiefpass-Bildes
und eines zweiten Tiefpass-Bildes einer nächsthöheren Ebene, also der zweiten
Ebene zu erhalten. Im Falle einer zeitlichen Skalierbarkeit stellt
diese rekonstruierte Version des ersten und des zweiten Tiefpass-Bildes
der beiden Ebenen die Basisschicht dar. Im Falle einer SNR-Skalierbarkeit wird
ferner auch das Ausgangssignal der zweiten Weiterverarbeitungseinrichtung 18 von 1 einer Invers-Weiterverarbeitung
unter Verwendung der entsprechenden Quantisierungs-Schrittweite
unterzogen, um dann, zusammen mit der rekonstruierten Version des
ersten und des zweiten Tiefpass-Bildes der zweiten Ebene in eine
Invers-Filterebene
nächster
Ordnung eingespeist zu werden, wie es nachfolgend noch beispielsweise
bezugnehmend auf 3 näher erörtert wird.
-
Wavelet-basierte
Videocodier-Algorithmen, bei denen Lifting-Implementierungen für die Wavelet-Analyse
und für
die Wavelet-Synthese eingesetzt werden, sind in J.-R. Ohm, „Complexity
and delay analysis of MCTF interframe wavelet structures", ISO/IECJTCI/WG11
Doc.M8520, July 2002, beschrieben. Anmerkungen zur Skalierbarkeit
finden sich auch in D. Taubman, „Successive refinement of
video: fundamental issues, past efforts and new directions", Proc. of SPIE (VCIP' 03) , vol. 5150,
pp. 649–663,
2003, wobei hierfür
jedoch erhebliche Änderungen
an Codiererstrukturen nötig
sind. Erfindungsgemäß wird dagegen
ein Codierer/Decodierer-Konzept
erreicht, das einerseits die Skalierbarkeitmöglichkeit hat und das andererseits
auf standardkonformen Elementen, insbesondere z.B. für die Bewegungskompensation,
aufbauen kann.
-
Bevor
detailliert auf einen Encoder/Decoder-Aufbau anhand von 3 eingegangen wird, sei
zunächst
anhand von 4 ein grundsätzliches
Lifting-Schema auf Seiten des Codierers bez. ein Invers-Lifting-Schema
auf Seiten des Decodierers dargestellt. Detaillierte Ausführungen
zu den Hintergründen
der Kombination von Lifting-Schemen und Wavelet-Transformationen finden sich in W. Sweldens, „A customdesign construction
of biorthogonal wavelets",
J. Appl. Comp. Harm. Anal., vol. 3 (no. 2), pp. 186–200, 1996
und I. Daubechies und W. Sweldens, "Factoring wavelet transforms into lifting
steps", J. Fourier
Anal. Appl., vol. 4 (no.3), pp. 247–269, 1998. Im allgemeinen
besteht das Lifting-Schema
aus drei Schritten, dem Polyphasen- Zerlegungsschritt, dem Prädiktions-Schritt
und dem Update-Schritt
(Aktualisierungs-Schritt), wie es anhand des Codierers in 1a dargestellt ist. Der
Polyphasen-Zerlegungsschritt
wird durch einen ersten Bereich I dargestellt, der Prädiktions-Schritt
wird durch einen zweiten Bereich II dargestellt, und der Aktualisierungs-Schritt
wird durch einen dritten Bereich III dargestellt.
-
Der
Zerlegungs-Schritt umfasst eine Aufteilung des eingangsseitigen
Datenstroms in eine identische erste Kopie für einen unteren Zweig 40a sowie
eine identische Kopie für
einen oberen Zweig 40b. Ferner wird die identische Kopie
des oberen Zweigs 40b um eine Zeitstufe (z–1)
verzögert,
so dass ein Abtastwert s2k+1 mit einem ungeradzahligen
Index k zum gleichen Zeitpunkt wie ein Abtastwert mit einem geraden
Index s2 k durch einen
jeweiligen Dezimierer bzw. Downsampler 42a, 42b läuft. Der
Dezimierer 42a bzw. 42b reduziert die Anzahl der
Samples im oberen bzw. im unteren Zweig 40b, 40a durch
Eliminieren jedes jeweils zweiten Abtastwerts.
-
Der
zweite Bereich II, der sich auf den Prädiktion-Schritt bezieht, umfasst
einen Prädiktionoperator 43 sowie
einen Subtrahierer 44. Der dritte Bereich, also der Aktualisierungs-Schritt
umfasst einen Aktualisierungs-Operator 45 sowie einen Addierer 46.
Ausgangsseitig existieren noch zwei Normierer 47, 48,
zum Normieren des Hochpass-Signals hk (Normierer 47)
und zum Normieren des Tiefpass-Signals lk durch
den Normierer 48.
-
Im
einzelnen führt
die Polyphasenzerlegung dazu, dass die geradzahligen und ungeradzahligen
Abtastwerte einen gegebenen Signals s[k] getrennt werden. Da die
Korrelationsstruktur typischerweise eine Lokalcharakteristik zeigt,
sind die geraden und ungeraden Polyphasenkomponenten hochkorreliert.
Daher wird in einem anschließenden
Schritt eine Prädiktion
(P) der ungeraden Abtastwerte unter Verwendung der geraden Abtastwerte
durchgeführt.
Der entsprechende Prädiktions-Operator (P) für jeden
ungeraden Abtastwert: sodd[k]
= s[2k + 1]ist eine lineare Kombination der benachbarten geraden
Abtastwerte: seven[k]
= s[2k]d.h.
-
-
Als
Ergebnis des Prädiktions-Schritts
werden die ungeradzahligen Abtastwerte durch ihre entsprechenden
Prädiktions-Restwerte h[k] = sodd[k] – P(seven)[k]ersetzt. Es sei darauf hingewiesen,
dass der Prädiktionsschritt äquivalent
zum Durchführen
eines Hochpass-Filters
einer Zwei-Kanal-Filterbank ist, wie es in I. Daubechies und W.
Sweldens, „Factoring
wavelet transforms into lifting steps", J. Fourier Anal. Appl. vol 4 (no.3),
pp. 247–269,
1998 dargelegt ist.
-
Im
dritten Schritt des Lifting-Schemas wird eine Tiefpass-Filterung durchgeführt, indem
die geraden Abtastwerte
seven[k] durch
eine lineare Kombination der Prädiktions-Restwerte
h[k] ersetzt werden. Der entsprechende Aktualisierungs-Operator U ist gegeben
durch
-
Durch
Ersetzen der geraden Abtastwerte mit l[k] = seven[k] + U(h)[k]kann das gegebene Signal
s[k] schließlich
durch l(k) und h(k) dargestellt werden, wobei jedes Signal jedoch die
halbe Abtastrate hat. Da sowohl der Aktualisierungs-Schritt als
auch der Prädiktions-Schritt
vollständig
invertierbar sind, kann die entsprechende Transformation als kritisch
abgetastete Perfekt-Rekonstruktions-Filterbank interpretiert werden.
In der Tat kann gezeigt werden, dass jegliche biorthogonale Familie
von FIR-Filtern durch eine Sequenz von einem oder mehreren Prädiktions-Schritten
und einem oder mehreren Aktualisierungs-Schritten realisiert werden
kann. Für
eine Normierung der Tiefpaß-
und Hochpass-Komponenten
werden, wie es ausgeführt
worden ist, die Normierer 47 und 48 mit geeignet
gewählten
Skalierungsfaktoren Fl und Fh versorgt.
-
Das
Invers-Lifting-Schema, das der Synthese-Filterbank entspricht, ist
in 4, auf der rechten
Seite, gezeigt. Es besteht einfach aus der Anwendung des Prädiktions-
und Aktualisierungs-Operators in umgekehrter Reihenfolge und mit
umgekehrten Vorzeichen, gefolgt von der Rekonstruktion unter Verwendung
der geraden und ungeraden Polyphasenkomponenten. Im einzelnen umfasst
der in 4 rechts gezeigte
Decodierer somit wieder einen ersten Decodiererbereich I, einen
zweiten Decodiererbereich II sowie einen dritten Decodiererbereich
III. Der erste Decodiererbereich macht die Wirkung des Aktualisierungs-Operators 45 rückgängig. Dies
geschieht dadurch, dass das durch einen weiteren Normierer 50 zurück-normierte
Hochpass-Signal dem Aktualisierungs-Operator 45 zugeführt wird.
Das Ausgangssignal des decodiererseitigen Aktualisierungs-Operators 45 wird
dann nun, im Gegensatz zum Addierer 46 in 4, einem Subtrahierer 52 zugeführt. Entsprechend
wird mit dem Ausgangssignal des Prädiktors 43 vorgegangen,
dessen Ausgangssignal nunmehr nicht, wie auf Codiererseite einem
Subtrahierer zugeführt wird,
sondern dessen Ausgangssignal nunmehr einem Addierer 53 zugeführt wird.
Nunmehr findet ein Upsampling des Signals in jedem Zweig um den
Faktor 2 statt (Blöcke 54a, 54b).
Hierauf wird der obere Zweig um einen Abtastwert in die Zukunft
geschoben, was äquivalent
zum Verzögern
des unteren Zweigs ist, um dann eine Addition der Datenströme auf dem
oberen Zweig und dem unteren Zweig in einem Addierer 55 durchzuführen, um
das rekonstruierte Signal sk am Ausgang
der Synthese-Filterbank zu erhalten.
-
Durch
den Prädiktor 43 bzw.
den Aktualisierer 45 können
verschiedene Wavelets implementiert werden. Falls das sogenannte
Haar-Wavelet implementiert werden soll, sind der Prädiktions-Operator
und der Aktualisierungs-Operator durch folgende Gleichung gegeben PHaar(seven)[k]
= s[2k] und UHaar(h)[k] = ½h[k],derart,
dass h[k] = s[2k + 1] – s[2k] und l[k] = s[2k] + ½h[k] = ½(s[2k]
+ s[2k + 1])dem nicht-normierten Hochpaß- bzw. Tiefpaß-(Analyse-)Ausgangssignal
des Haar-Filters entsprechen.
-
Im
Falle des 5/3-Biorthogonal-Spline-Wavelets haben das Tiefpaß- und das
Hochpaß-Analyse-Filter dieses
Wavelets 5 bzw. 3 Filtertaps, wobei die entsprechende
Skalierungsfunktion ein B-Spline der Ordnung 2 ist. In
Codieranwendungen für
nicht-bewegte Bilder (Still-Images, wie beispielsweise JPEG 2000)
wird dieses Wavelet für
ein zeitliches Subband-Codierschema verwendet. In einer Lifting-Umgebung sind die
entsprechenden Prädiktions-
und Aktualisierungs-Operatoren der 5/3-Transformation folgendermaßen gegeben P5/3(seven)[k]
= ½(s[2k]
+ s[2k+2]) und U5/3(h)[k]= ¼(h[k]
+ h[k – 1].
-
3 zeigt ein Blockschaltbild
einer erfindungsgemäßen Codierer/Decodierer-Struktur
mit beispielhaften vier Filterebenen sowohl auf Seiten des Codierers
als auch auf Seiten des Decodierers. Aus 3 ist zu ersehen, dass die erste Filterebene,
die zweite Filterebene, die dritte Filterebene und die vierte Filterebene bezogen
auf den Codierer identisch sind. Die Filterebenen bezogen auf den
Decodierer sind ebenfalls identisch. Auf Codiererseite umfasst jede
Filterebene als zentrale Elemente einen Rückwärts-Prädiktor
Mi0 60 sowie einen Vorwärts-Prädiktor Mi1 61. Der Rückwärts-Prädiktor 60 entspricht
prinzipiell dem Prädiktor 43 von 4, während der Vorwärts-Prädiktor 61 dem
Aktualisierer 45 von 4 entspricht.
-
Im
Unterschied zu 4 sei
darauf hingewiesen, dass sich 4 auf
einen Strom von Abtastwerten bezieht, bei denen ein Abtastwert einen
ungeradzahligen Index 2k+1 hat, während ein anderer Abtastwert
einen geradzahligen Index 2k hat. Die Notation in 3 bezieht sich jedoch, wie
es bereits anhand von 1 dargelegt
worden ist, auf eine Gruppe von Bildern anstatt auf eine Gruppe
von Abtastwerten. Hat ein Bild beispielsweise eine Anzahl von Abtastwerten
bzw. Pixeln, so wird dieses Bild insgesamt eingespeist. Dann wird das
nächste
Bild eingespeist etc. Es existieren somit nicht mehr ungeradzahlige
und geradzahlige Abtastwerte, sondern ungeradzahlige und geradzahlige
Bilder. Erfindungsgemäß wird das
für ungeradzahlige
und geradzahlige Abtastwerte beschriebene Lifting-Schema auf ungeradzahlige
bzw. geradzahlige Bilder, von denen jedes eine Vielzahl von Abtastwerten
hat, angewendet. Aus dem abtastwert-weisen Prädiktor 43 von 4 wird nunmehr die Rückwärts-Bewegungskompensations-Prädiktion 60,
während
aus dem abtastwert-weisen Aktualisierer 45 die Bildweise
Vorwärts-Bewegungskompensations-Prädiktion 61 wird.
-
Es
sei darauf hingewiesen, dass die Bewegungsfilter, die aus Bewegungsvektoren
bestehen, und die Koeffizienten für die Blöcke 60 und 61 darstellen,
jeweils für
zwei aufeinan der bezogene Bilder berechnet und als Seiteninformationen
vom Codierer zum Decodierer übertragen
werden. Von wesentlichem Vorteil beim erfindungsgemäßen Konzept
ist jedoch die Tatsache, dass die Elemente 91, 92,
wie sie anhand von 9 beschrieben
sind und im Standard H.264/AVC standardisiert sind, ohne weiteres
dazu verwendet werden können,
um sowohl die Bewegungsfelder Mi0 als auch
die Bewegungsfelder Mi 1 zu
berechnen. Für
das erfindungsgemäße Konzept
muss daher kein neuer Prädiktor/Aktualisierer
eingesetzt werden, sondern es kann der bereits bestehende, untersuchte
und auf Funktionalität
und Effizienz überprüfte im Videostandard
genannte Algorithmus für
die Bewegungskompensation in Vorwärtsrichtung oder in Rückwärtsrichtung
eingesetzt werden.
-
Insbesondere
zeigt die in 3 dargestellt
allgemeine Struktur der verwendeten Filterbank eine zeitliche Zerlegung
des Videosignals mit einer Gruppe von 16 Bildern, die an einem Eingang 64 eingespeist
werden. Die Zerlegung ist eine dyadische zeitliche Zerlegung des
Videosignals, wobei bei dem in 3 gezeigten Ausführungsbeispiel
mit 4 Ebenen 24 = 16 Bilder, also eine Gruppengröße von 16
Bildern benötigt
wird, um auf der Darstellung mit der kleinsten zeitlichen Auflösung, also
auf den Signalen am Ausgang 28a und am Ausgang 28b anzukommen.
Werden daher 16 Bilder gruppiert, so führt dies zu einer Verzögerung von
16 Bildern, was das in 3 gezeigte
Konzept mit vier Ebenen für
interaktive Anwendungen eher problematisch macht. Wird daher auf
interaktive Anwendungen abgezielt, so wird es bevorzugt, kleinere
Gruppen von Bildern zu bilden, wie beispielsweise vier oder acht
Bilder zu gruppieren. Dann wird die Verzögerung entsprechend reduziert,
so dass auch der Einsatz für
interaktive Anwendungen möglich
wird. In Fällen,
in denen Interaktivität
nicht benötigt
wird, beispielsweise zu Speicherzwecken etc. kann die Anzahl der
Bilder in einer Gruppe, also die Gruppengröße, entsprechend erhöht werden,
beispielsweise auf 32, 64, etc. Bilder.
-
Erfindungsgemäß wird es
bevorzugt, die interaktive Anwendung des Haar-basierten bewegungs-kompensierten
Lifting-Schemas
zu verwenden, das aus einer Rückwärts-Bewegungskompensations-Prädiktion (Mi0), wie in H.264/AVC besteht, und das ferner
einen Aktualisierungs-Schritt umfasst, der eine Vorwärtsbewegungskompensation
(Mi1) umfasst. Sowohl der Prädiktions-Schritt
als auch der Aktualisierung-Schritt verwenden den Bewegungskompensationsprozess,
wie er in H.264/AVC dargestellt ist. Ferner wird es bevorzugt, nicht
nur die Bewegungskompensation zu verwenden, sondern auch das in 9 mit dem Bezugszeichen 89 bezeichnet
Deblocking-Filter 89 einzusetzen.
-
Die
zweite Filterebene umfasst wieder Downsampler 66a, 66b,
einen Subtrahierer 69, einen Rückwärts-Prädiktor 67, einen Vorwärts-Prädiktor 68 sowie
einen Addierer 70 und, wie es bereits anhand von 1 dargestellt worden ist,
die Weiterverarbeitungseinrichtung 18, um an einem Ausgang
der Weiterverarbeitungseinrichtung 18, wie es bereits anhand
von 1 dargestellt worden
ist, das erste und das zweite Hochpass-Bild der zweiten Ebene auszugeben,
während
am Ausgang des Addierers 70 das erste und das zweite Tiefpass-Bild der zweiten
Ebene ausgegeben werden.
-
Der
erfindungsgemäße Codierer
in 3 umfasst zusätzlich eine
dritte Ebene sowie eine vierte Ebene, wobei in den Eingang 64 der
vierten Ebene eine Gruppe von 16 Bildern eingespeist wird. An einem
Hochpass-Ausgang 72 der vierten Ebene, der auch als HP4
bezeichnet ist, werden mit einem Quantisierungs-Parameter Q quantisierte
und entsprechend weiterverarbeitete acht Hochpass-Bilder ausgegeben.
Entsprechend werden an einem Tiefpass-Ausgang 73 der vierten
Filterebene acht Tiefpass-Bilder ausgegeben, die in einem Eingang 74 der
dritten Filterebene eingespeist wird. Die Ebene ist wiederum wirksam,
um an einem Hochpass-Ausgang 75, der auch mit HP3 bezeichnet
ist, vier Hochpass-Bilder zu erzeugen und um an einem Tiefpass-Ausgang 76 vier
Tiefpass-Bilder zu erzeugen, die in den Eingang 10 der
zweiten Filterebene eingespeist werden und zerlegt werden, wie es
anhand von 3 bzw. anhand
von 1 dargelegt worden
ist.
-
Es
sei besonders darauf hingewiesen, dass die durch eine Filterebene
verarbeitete Gruppe von Bildern nicht unbedingt Videobilder sein
müssen,
die von einer ursprünglichen
Videosequenz stammen, sondern auch Tiefpass-Bilder sein können, die
von einer nächsthöheren Filterebene
an einem Tiefpass-Ausgang der Filterebene ausgegeben worden sind.
-
Ferner
sei darauf hingewiesen, dass das in 3 gezeigte
Codierer-Konzept für
sechzehn Bilder ohne weiteres auf acht Bilder reduziert werden kann,
wenn einfach die vierte Filterebene weggelassen wird und die Gruppe
von Bildern in den Eingang 74 eingespeist wird. Genauso
kann das in 3 gezeigte
Konzept auch ohne weiteres auf eine Gruppe von zweiunddreißig Bildern
erweitert werden, indem eine fünfte
Filterebene hinzugefügt
wird, und indem die dann sechzehn Hochpass-Bilder an einem Hochpass-Ausgang
der fünften
Filterebene ausgegeben werden und die sechzehn Tiefpass-Bilder am Ausgang
der fünften
Filterebene in den Eingang 64 der vierten Filterebene eingespeist
werden.
-
Auf
Decodiererseite wird ebenfalls das baumartige Konzept der Codiererseite
angewendet, jedoch nun nicht mehr, wie auf Codiererseite von der
höheren
Ebene zur niedrigeren Ebene, sondern nunmehr, auf der Decodiererseite,
von der niedrigeren Ebene zur höheren
Ebene. Hierzu wird von einem Übertragungsmedium,
das schematisch als Network Abstraction Layer 100 bezeichnet
ist, der Datenstrom empfangen und der empfangene Bitstrom wird zunächst einer
Invers-Weiterverarbeitung
unter Verwendung der Invers-Weiterverarbeitungseinrichtungen 30a, 30b unterzogen,
um eine rekonstruierte Version des ersten Hochpass-Bildes der ersten
Ebene am Ausgang der Einrichtung 30a und eine rekonstruierte
Version des Tiefpass-Bildes der ersten Ebene am Ausgang des Blocks 30b von 3 zu erhalten. Dann wird, in
Analogie zur rechten Hälfte
von 4, zunächst die
Vorwärts-Bewegungskompensations-Prädiktion
mittels des Prädiktors 61 rückgängig gemacht,
um dann das Ausgangssignal des Prädiktors 61 von der
rekonstruierten Version des Tiefpass-Signals zu subtrahieren (Subtrahierer 101).
-
Das
Ausgangssignal des Subtrahierers 101 wird in einen Rückwärts-Kompensations-Prädiktor 60 eingespeist,
um ein Prädiktionsergebnis
zu erzeugen, das in einem Addierer 102 zur rekonstruierten
Version des Hochpass-Bildes addiert wird. Hierauf werden beide Signale,
also die Signale im unteren Zweig 103a, 103b auf
die doppelte Abtastrate gebracht, und zwar unter Verwendung der
Upsampler 104a, 104b, wobei dann das Signal auf
dem oberen Zweig je nach Implementierung verzögert bzw. „beschleunigt" wird. Es sei darauf
hingewiesen, dass das Upsampling durch die Brücke 104a, 104b einfach
durch Einfügen
von einer Anzahl von Nullen, die gleich der Anzahl von Samples für ein Bild
entspricht, durchgeführt
wird. Die Verschiebung um die Verzögerung eines Bildes durch das
mit z–1 gezeigte
Element im oberen Zweig 103b gegenüber dem unteren Zweig 103a bewirkt,
dass die Addition durch einen Addierer 106 dazu führt, dass
ausgangsseitig bezüglich
des Addierers 106 die beiden Tiefpass-Bilder der zweiten
Ebene nacheinander vorliegen.
-
Die
rekonstruierte Version des ersten und des zweiten Tiefpass-Bildes
der zweiten Ebene werden dann in das decodiererseitige Invers-Filter
der zweiten Ebene eingespeist und dort, zusammen mit den übertragenen
Hochpaß-Bildern
der zweiten Ebene wieder durch die identische Implementierung der
Invers-Filterbank kombiniert, um an einem Ausgang 108 der
zweiten Ebene eine Folge von vier Tiefpass-Bildern der dritten Ebene
zu haben. Die vier Tiefpass-Bilder der dritten Ebene werden in einer
Invers-Filterebene der dritten Ebene mit den übertragenen Hochpaß-Bildern
der dritten Ebene kombiniert, um an einem Ausgang 110 des
Invers-Filters der dritten Ebene acht Tiefpass-Bilder der vierten
Ebene in aufeinanderfolgendem Format zu haben. Diese acht Tiefpass- Bilder der dritten
Ebene werden dann, in einem Invers-Filter der vierten Ebene mit den acht
Hochpaß-Bildern
der vierten Ebene, die vom Übertragungsmedium 100 über den
Eingang HP4 empfangen werden, wieder wie anhand der ersten Ebene
besprochen, kombiniert, um an einem Ausgang 112 des Invers-Filters
der vierten Ebene eine rekonstruierte Gruppe von sechzehn Bildern
zu erhalten.
-
In
jeder Stufe der Analyse-Filterbank werden somit zwei Bilder, also
entweder ursprüngliche
Bilder oder Bilder die Tiefpaß-Signale
darstellen und in einer nächsthöheren Ebene
erzeugt worden sind, in ein Tiefpass-Signal und in ein Hochpass-Signal
zerlegt. Das Tiefpass-Signal kann als Darstellung der Gemeinsamkeiten
der Eingangsbilder betrachtet werden, während das Hochpass-Signal als
Darstellung der Unterschiede zwischen den Eingangsbildern betrachtet
werden kann. In der entsprechenden Stufe der Synthese-Filterbank werden
die beiden Eingangsbilder unter Verwendung des Tiefpass-Signals
und des Hochpass-Signals wieder rekonstruiert. Da im Syntheseschritt
die inversen Operationen des Analyseschritts durchgeführt werden,
garantiert die Analyse/Synthese-Filterbank (ohne Quantisierung selbstverständlich)
eine perfekte Rekonstruktion.
-
Die
einzigen auftretenden Verluste kommen aufgrund der Quantisierung
in den Weiterverarbeitungseinrichtungen z.B. 26a, 26b, 18 vor.
Wird sehr fein quantisiert, so wird ein gutes Signal-Rausch-Verhältnis erreicht.
Wird dagegen sehr grob quantisiert, so wird ein relativ schlechtes
Signal-Rausch-Verhältnis, jedoch
bei niedriger Bitrate, also bei niedrigem Bitbedarf, erreicht.
-
Ohne
SNR-Skalierbarkeit könnte
bereits mit dem in 3 dargestellten
Konzept zumindest eine Zeit-Skalierungssteuerung implementiert werden.
Hierzu wird bezugnehmend auf 5 eine
Zeit-Skalierungs-Steuerung 120 eingesetzt, die ausgebildet
ist, um eingangsseitig die Hochpaß- bzw. Tiefpass-Ausgänge bzw. die Ausgänge der
Weiterverar beitungseinrichtungen (26a, 26b, 18 ...)
zu erhalten, um aus diesen Teildatenströmen TP1, HP1, HP2, HP3, HP4
einen skalierten Datenstrom zu erzeugen, der in einer Basis-Skalierungsschicht
die weiterverarbeitete Version des ersten Tiefpass-Bildes und des
ersten Hochpass-Bildes hat. In einer ersten Erweiterungs-Skalierungsschicht
könnte
dann die weiterverarbeitete Version der zweiten Hochpass-Bilder
untergebracht sein. In einer zweiten Erweiterungs-Skalierungsschicht
könnten
dann die weiterverarbeiteten Versionen der Hochpass-Bilder dritter
Ebene untergebracht sein, während
in einer dritten Erweiterungs-Skalierungsschicht
die weiterverarbeiteten Versionen der Hochpass-Bilder vierter Ebene
eingebracht sind. Damit könnte
ein Decodierer allein aufgrund der Basis-Skalierungsschicht bereits eine zeitlich
gering qualitative Sequenz von Tiefpass-Bildern niedriger Ebene
erzeugen, also pro Gruppe von Bildern, zwei Tiefpass-Bilder erster
Ebene. Mit Hinzunahme jeder Erweiterungs-Skalierungsschicht kann
die Anzahl der rekonstruierten Bilder pro Gruppe immer verdoppelt
werden. Die Funktionalität
des Decodierers wird typischerweise von einer Skalierungs-Steuerung
gesteuert, die ausgebildet ist, um zu erkennen, wie viel Skalierungsschichten im
Datenstrom enthalten sind bzw. wie viele Skalierungsschichten vom
Decodierer beim Decodieren berücksichtigt
werden sollen.
-
Nachfolgend
wird bezugnehmend auf 6 auf
eine SNR-Skalierungsfunktionalität eingegangen,
wie sie für
die vorliegende Erfindung bevorzugt wird. Die Erklärung der
SNR-Skalierbarkeit
gemäß 6 wird unter Verwendung
der aus 3 ausgegebenen
Signale HP4, HP3, HP2, HP1, TP1 durchgeführt. Ein mit einer SNR-Skalierbarkeit
ausgestatteter Codierer umfasst neben den anhand von 3 dargestellten Elementen zusätzlich eine
Invers-Weiterverarbeitungseinrichtung 140, die prinzipiell
die mit Q–1 bezeichneten
Elemente auf Decodiererseite von 3 enthalten
wird. Es sei jedoch darauf hingewiesen, dass die Invers-Weiterverarbeitungseinrichtung 140 auf
Codiererseite vorgesehen ist, um die SNR-Skalierbarkeit zu schaffen.
Die Invers-Weiterverarbeitungseinrichtung 140 erzeugt
eine inversquantisierte und invers-weiterverarbeitete Darstellung
der Tiefpass-Bilder erster Ebene TP1, der Hochpass-Bilder erster
Ebene HP1, der Hochpass-Bilder zweiter Ebene, der Hochpass-Bilder
dritter Ebene und der Hochpaßbilder
vierter Ebene.
-
Diese
invers-quantisierten Videosignale werden einem Komponenten-Subtrahierer 142 zugeführt, der zugleich
das erste Tiefpass-Bild TP1, das erste Hochpass-Bild HP1, die Hochpass-Bilder
zweiter Ebene, die Hochpass-Bilder dritter Ebene und die Hochpass-Bilder
vierter Ebene vor der Quantisierung, also am Ausgang der Subtrahierer 69 bzw.
Addierer 70 von 3 umfasst.
Hierauf wird eine komponentenweise Subtraktion durchgeführt, d.h.
es wird beispielsweise das erste invers-quantisierte Tiefpass-Bild
erster Ebene von dem ersten Tiefpass-Bild erster Ebene vor der Quantisierung
subtrahiert etc. um jeweilige Quantisierungsfehler für das erste
Tiefpass-Bild erster Ebene FTP1, das erste
Hochpass-Bild erster
Ebene FHP1 etc., zu erhalten. Diese Quantisierungsfehler,
die wegen der Tatsache vorhanden sind, dass ursprünglich eine
Quantisierung der ersten Quantisierungs-Schrittweite Qu.-SW durchgeführt worden
ist, wird in eine Weiterverarbeitungseinrichtung 144 eingespeist,
die eine Weiterverarbeitung vorzugsweise sämtlicher Quantisierungs-Fehlersignale F unter
Verwendung einer zweiten Quantisierer-Schrittweite durchführt, die
kleiner als die erste Quantisierer-Schrittweite ist. Während das
Ausgangssignal von der Einrichtung 144 eine erste Erweiterungs-Skalierungsschicht
darstellt, stellt das Eingangssignal in die Invers-Weiterverarbeitungseinrichtung 140 die
Basis-Skalierungsschicht dar,
die, ebenso wie die erste Erweiterungsskalierungsschicht in das
Medium 100 bzw. logisch ausgedrückt in die Network Abstraction
Layer übertragen
werden kann, wo je noch Ausführungsform
noch zusätzliche
Signalformatmanipulationen etc. durchgeführt werden können.
-
Zum
Erzeugen einer zweiten Erweiterungs-Skalierungsschicht wird, aufbauend
auf 6, dahingehend vorgegangen,
dass die erste Erweiterungs-Skalierungsschicht, aufgrund des Blocks 144 wieder
unter Verwendung der zweiten Quantisierer-Schrittweite invers-weiterverarbeitet
wird. Das Ergebnis wird dann zu den unter Verwendung der ersten
Quantisierer-Schrittweite invers-quantisierten Daten hinzuaddiert,
um eine decodierte Darstellung des Bildsignals auf der Basis der
Basis-Skalierungsschicht und der ersten Erweitungs-Skalierungsschicht
zu erzeugen. Diese Darstellung wird dann wieder in einen Komponenten-Subtrahierer
eingespeist, um den noch verbleibenden Fehler aufgrund der Quantisierung
unter Verwendung der ersten Quantisierer-Schrittweite und der zweiten
Quantisierer-Schrittweite zu berechnen. Dann soll das daraus erhaltene
Fehlersignal wieder unter Verwendung einer dritten Quantisierer-Schrittweite,
die kleiner als die erste und die zweite Quantisierer-Schrittweite
ist, erneut quantisiert werden, um eine zweite Erweiterungs-Skalierungsschicht
zu erzeugen.
-
Es
sei darauf hingewiesen, dass jede Skalierungsschicht nicht nur die
weiterverarbeiteten Tiefpaß-/Hochpass-Bilder
der verschiedenen Ebene haben kann, sondern zusätzlich, als Seiteninformationen,
das Vorwärts-Bewegungs-Feld
Mi0 sowie das Rückwärts-Bewegungs-Feld Mll haben kann. Ferner sei darauf hingewiesen,
dass für
jeweils zwei aufeinanderfolgende Bilder ein Vorwärts-Bewegungs-Feld, sowie ein
Rückwärts-Bewegungs-Feld
erzeugt werden, wobei diese Bewegungsfelder bzw. allgemein gesagt
Pädiktionsinformationen
vom Encoder zum Decoder in Form von Seiteninformationen zusätzlich zu
den weiterverarbeiteten Hochpaß/Tiefpass-Bildern übertragen
werden.
-
Nachfolgend
werden der Prädiktionsschritt
und der Aktualisierungsschritt des Analyse- und des Synthese-Prozesses
detaillierter beschrieben. Die Bewegungsfelder Mi0 und
Mi1 spezifizieren allgemein die Bewegung
zwischen zwei Bildern unter Verwendung eines Teilsatzes der P-Slice-Synthax
von H264/AVC. Für
die Bewegungsfelder Mi0, die von den Prädiktionsschritten
verwendet werden, wird es bevorzugt, einen INTRA-artigen makroblock-basierten
Rückzugsmodus
aufzunehmen, in dem die (bewegungskompensierten) Prädiktionssignale
für einen
Makroblock durch ein 4×4-Array
von Luma-Transformationskoeffizientenpegeln
und zwei 2×2-Arrays
von Chroma-Transformationskoeffizientenpegeln ähnlich zum INTRA16×16-Makroblock-Modus bei
H264/AVC spezifiziert wird, wobei alle AC-Koeffizienten auf Null
gesetzt sind. In den Bewegungsfeldern Mi1,
die für
die Aktualisierungsschritte verwendet werden, wird dieser Modus
nicht verwendet.
-
Nachfolgend
wird der allgemeine Bewegungskompensations-Prädiktionsprozeß dargestellt,
der von den Prädiktions- bzw. Aktualisierungs-Schritten
sowohl auf der Analyseseite als auch auf der Syntheseseite verwendet
wird.
-
Eingegeben
in diesen Prozeß werden
ein Referenzbild R, ein Quantisierungsparameter QP (falls benötigt) und
ein blockweises Bewegungsfeld M, wobei die folgenden Eigenschaften
vorliegen:
Für
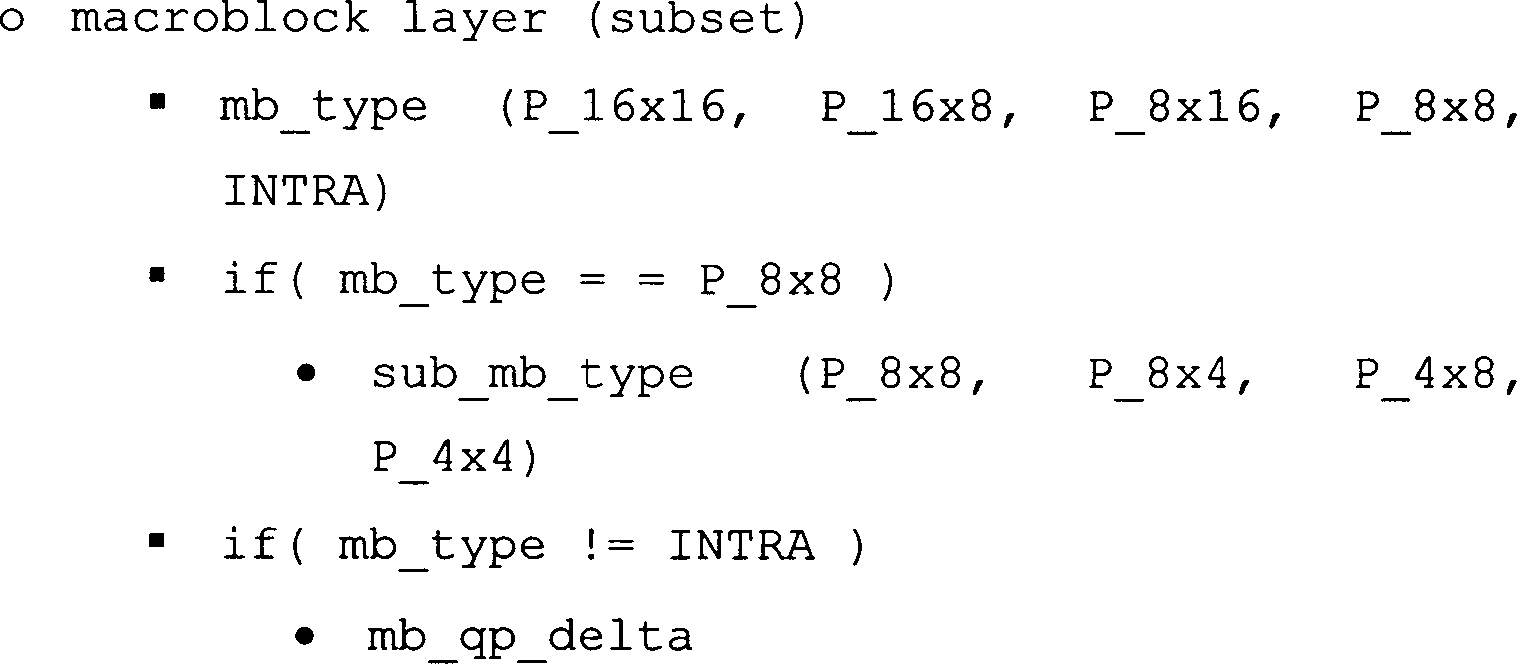
jeden Makroblock des bewegungskompensierten Prädiktionsbildes P spezifiziert
das Bewegungsfeld M einen Makroblock-Modus, der gleich P-16×16 P-16×8 P-8×16 P-8×8 oder
INTRA sein kann.
-
Wenn
der Makroblockmodus gleich P-8×8 ist, wird für jeden
8×8-Sub-Makroblock
ein entsprechender Sub-Makroblock-Modus spezifiziert (P-8×8,
P-8×4,
P-4×8,
P-4×4).
-
Wenn
der Makroblockmodus gleich INTRA ist, ist die Erzeugung des Prädiktionssignals
spezifiziert durch ein 4×4-Array von Luminanz-Koeffizientenpegeln
und zwei 2×2-Arrays
von Chrominanz-Koeffizientenpegeln.
-
Andernfalls
ist die Erzeugung des Prädiktionssignals
spezifiziert durch einen Bewegungsvektor mit Viertel-Abtastwert- Genauigkeit für jede Makroblock-
oder Sub-Makroblock-Aufteilung.
-
Mit
dem Referenzbild R und der Bewegungsfeldbeschreibung M wird das
bewegungs-kompensierte Prädiktionssignal
P, das dann subtrahiert bzw. addiert wird, auf Makroblock-Art und
-Weise aufgebaut, wie es nachfolgend beschrieben wird:
Wenn
der Makroblockmodus, der in M spezifiziert ist, nicht = INTRA ist,
wird für
jede Makroblock-Aufteilung oder für jede Sub-Makroblock-Aufteilung
folgendes ausgeführt:
Die Luma- und Chroma-Abtastwerte des Bildes, die durch die entsprechende
Makroblock- oder Sub-Makroblock-Aufteilung umfasst werden, werden durch
eine Viertel-Abtastwert-genaue bewegungs-kompensierte Prädiktion
gemäß dem Standort
ISO/IEC 14496-10 AVC, Doc. JVT-G050r1, May 2003, erhalten. p[i,j] = Mint(r, i – mx ,
j – my),
-
In
der vorstehenden Gleichung ist [mx, my]T der Bewegungsvektor
des betrachteten Makroblocks bzw. des betrachteten Sub-Makroblocks,
gegeben durch M. r[] ist das Array von Luma- oder Chroma-Abtastwerten des
Referenzbildes N. Darüber
hinaus stellt Mint() den Interpolationsprozess
dar, der für
die bewegungs-kompensierte Prädiktion
in H264/AVC spezifiziert ist, jedoch mit der Ausnahme, dass das
Clippen auf das Intervall [0;255] entfernt ist.
-
Andernfalls
(der Makroblock-Modus ist INTRA), gilt das folgende:
Das gegebene
4×4-Array
aus Luminanz-Transformationskoeffizienten-Pegeln wird als Array
von DC-Luma-Koeffizienten-Pegeln
für den
INTRA16×16-Makroblock-Modus
in H.264/AVC behandelt, wobei der Invers-Skalierungs-Transformations-Prozeß gemäß H.264/AVC
verwendet wird, und zwar unter Verwendung des gegebenen Quantisierungsparame ters
QP, wobei angenommen wird, dass alle AC-Transformationskoeffizienten-Pegel auf
Null gesetzt sind. Als Ergebnis wird ein 16×16-array res[] aus Residual-Luma-Abtastwerten (Rest-Luma-Abtastwerten)
erhalten. Die Luma-Abtastwerte
des Prädiktions-Bildes
P, die sich auf den betrachteten Makroblock beziehen, werden folgendermaßen berechnet: p[i,j] = 128 + res[i,j].
-
Hier
sei angemerkt, dass für
jeden 4×4-Luma-Block
das erhaltene Prädiktionssignal
P[] konstant ist und eine Approximierung des Durchschnitts des ursprünglichen
4×4-Luma-Blocks darstellt.
-
Für jede Chrominanz-Komponente
wird das gegebene 2×2-Array
aus Chrominanz-Transformations-Koeffizienten-Pegeln als Array mit
DC-Chroma-Koeffizienten-Pegeln behandelt, wobei der Invers-Skalierungs/Transformationsprozeß für Chroma-Koeffizienten gemäß dem Standard
verwendet wird, und zwar unter Verwendung des gegebenen Quantisierungsparameters
QP, wobei angenommen wird, dass alle AC-Transformationskoeffizienten-Pegel
gleich Null sind. Als Ergebnis wird ein 8×8-array res[] aus Rest-Chroma-Abtastwerten
erhalten. Die Chroma-Abtastwerte des Prädiktionsbildes P, die sich
auf den betrachteten Makroblock beziehen, werden folgendermaßen berechnet: p[i,j] = 128 + res[i,j]
-
Es
sei darauf hingewiesen, dass für
jeden 4×4-Chroma-Block
das erhaltene Prädiktionssignal
p[] konstant ist und eine Approximierung des Durchschnitts des ursprünglichen
4×4-Chroma-Blocks darstellt.
-
Nach
dem Erzeugen des gesamten Prädiktionssignals-Bildes
P wird vorzugsweise das Deblocking-Filter, wie es gemäß dem Standard
definiert ist, auf dieses Bild angewendet, wobei die Ableitung der
Grenzfilterstärke
nur auf den Makroblock-Modi
(Informationen über
INTRA) basiert und insbesondere auf den Bewegungsvektoren, die in
der Bewegungsbeschreibung M spezifiziert sind, basiert. Ferner wird
das Clipping auf das Intervall [0;255] entfernt.
-
Wie
aus der obigen Beschreibung zu sehen ist, ist der allgemeine Prozeß des Erzeugens
von bewegungs-kompensierten Prädiktionsbildern
nahezu identisch zu dem Rekonstruktionsprozeß von P-Slices gemäß H.264/AVC.
Die folgenden Unterschiede sind jedoch zu sehen:
Das Clipping
auf das Interval [0;225] in den Verfahren der bewegungskompensierten
Prädiktion
und des Deblockings wird entfernt.
-
Ferner
wird eine vereinfachte Intra-Modus-Rekonstruktion ohne Intra-Prädiktion
durchgeführt,
wobei ferner alle AC-Transformationskoeffizienten-Pegel
auf Null gesetzt sind. Ferner wird eine vereinfachte Rekonstruktion
für die
bewegungskompensierten Prädiktionsmodi
ohne Residual-Informationen durchgeführt.
-
Nachfolgend
wird auf den Prädiktionsschritt
auf der Analyseseite (Codiererseite) bezug genommen. Es seien zwei
Eingangsbilder A und B sowie das Bewegungsfeld Mi0 gegeben,
das die blockweise Bewegung des Bilds B bezüglich des Bilds A darstellt.
Ferner sei ein Quantisierungsparameter QP gegeben, wobei die folgenden
Operationen durchgeführt
werden, um ein Residualbild H zu erhalten:
Ein Bild P, das
eine Prädiktion
des Bildes B darstellt, wird erhalten, indem die vorstehend beschriebenen
Verfahren aktiviert werden, wobei das Referenzbild A die Bewegungsfeldbeschreibung
Mi0 und der Quantisierungsparameter QP als
Eingabe verwendet werden.
-
Das
Residualbild H wird erzeugt durch: h[i,j] = b[i,j] – p[i,j]. wobei
h[], b[] und p[] die Luma- oder Chroma-Abtastwerte eines der Bilder
H, B, bzw. P darstellen.
-
Nachfolgend
wird auf den Aktualisierungsschritt auf Analyseseite (Codiererseite)
eingegangen. Hierzu wird das Eingangsbild A, das Restbild H, das
in dem Prädiktionsschritt
erhalten worden ist, sowie das Bewegungsfeld Mi1 gegeben,
das die blockweise Bewegung des Bilds A bezüglich des Bilds B darstellt,
wobei ferner die folgenden Operationen durchgeführt werden, um ein Bild L zu
erhalten, das das zeitliche Tiefpass-Signal darstellt.
-
Ein
Bild P wird erzeugt, indem der vorstehend beschriebene Prozeß aufgerufen
wird, wobei jedoch das Bild H das Referenzbild darstellt und ferner
die Bewegungsfeld-Beschreibung Mi1 als Eingabe
verwendet werden.
-
Das
Tiefpassbild L wird durch folgende Gleichung erzeugt: l[i,j]
= a[i,j] + (p[i,j] >> 1),wobei l[],
a[] und p[] die Luma- ober Chroma-Abtastwert-Arrays der Bilder L, A bzw. P darstellen.
Ferner sei darauf hingewiesen, dass der Operator >> eine Verschiebung um ein Bit nach rechts,
also eine Halbierung des Wertes darstellt.
-
Nachfolgend
wird auf den Aktualisierungsschritt auf Synthese Seite (Decodiererseite)
eingegangen. Gegeben seien ein Tiefpassfilter L, das Restbild H
sowie das Bewegungsfeld Mi1, wobei die folgenden
Operationen durchgeführt
werden, um das rekonstruierte Bild A zu erhalten:
Ein Bild
P wird erzeugt durch Aufrufen des vorstehend beschriebenen Prozesses,
wobei H als Referenzbild verwendet wird, und wobei die Bewegungsfeld-Beschreibung
Mi 1 als Ein gabe
verwendet wird. Das rekonstruierte Bit A wird erzeugt durch: a[i.j] = l[i,j] – (p[i,j] >> 1). wobei
a[], l[] und p[] die Abtastwerte-Arrays der Bilder A, L bzw. P darstellen.
-
Nachfolgend
wird auf den Prädiktionsschritt
auf Syntheseseite (Decodiererseite) eingegangen. Gegeben sei das
Restbild H, das rekonstruierte Bild A, das in dem Aktualisierungsschritt
erhalten wird, sowie das Bewegungsfeld Mi0.
wobei folgende Operationen durchgeführt werden, um das rekonstruierte
Bit B zu erhalten:
Ein Bild P, das eine Prädiktion des Bildes B darstellt,
wird erzeugt durch Aufrufen des vorstehend beschriebenen Verfahrens,
wobei das Bild A als Referenzbild verwendet wird, wobei die Bewegungsfeld-Beschreibung Mi0 verwendet wird, wobei der Quantisierungsparameter
QP als Eingabe verwendet wird.
-
Das
rekonstruierte Bild B wird erzeugt durch b[i,j]
= h[i,j] + p[i,j],wobei b[], h[] und p[] die Abtastwert-Arrays
der Bilder B, H bzw. P darstellen.
-
Durch
Kaskadieren der grundsätzlich
paarweisen Bildzerlegungsstufen wird eine dyadische Baumstruktur
erhalten, die eine Gruppe von 2n Bildern
in 2n–1 Restbilder
und ein einziges Tiefpaß-
(oder Intra-) Bild zerlegt, wie es anhand von 7 für
eine Gruppe von 8 Bildern dargestellt ist. Insbesondere zeigt 7 das Hochpass-Bild HP1
der ersten Ebene am Ausgang 22 des Filters erster Ebene
sowie das Tiefpass-Bild erster Ebene am Ausgang 24 des
Filters erster Ebene. Die beiden Tiefpass-Bilder TP 2 am Ausgang 16 des Filters zweiter
Ebene sowie die beiden Hochpass-Bilder, die durch die zweite Weiterverarbeitungseinrichtung 18 von 3 verarbeitet werden, sind
als zweite Ebene in 7 gezeigt.
-
Die
Tiefpass-Bilder dritter Ebene liegen am Ausgang 76 des
Filters dritter Ebene an, während
die Hochpass-Bilder dritter Ebene am Ausgang 75 in weiterverarbeiteter
Form vorliegen. Die Gruppe von 8 Bildern könnte ursprüngliche 8 Videobilder umfassen,
wobei dann der Codierer von 3 ohne
vierte Filterebene eingesetzt werden würde. Ist die Gruppe von 8 Bildern
dagegen eine Gruppe von 8 Tiefpass-Bildern, wie sie am Ausgang 73 des
Filters vierter Ebene eingesetzt werden, so kann der erfindungsgemäße Codierer
ebenfalls eingesetzt werden.
-
Allgemein
gesagt werden für
eine Gruppe von 2n Bildern (2n+1–2) Bewegungsfeldbeschreibungen, (2n–1)
Restbilder sowie ein einziges Tiefpaß- (oder Intra-) Bild übertragen.
-
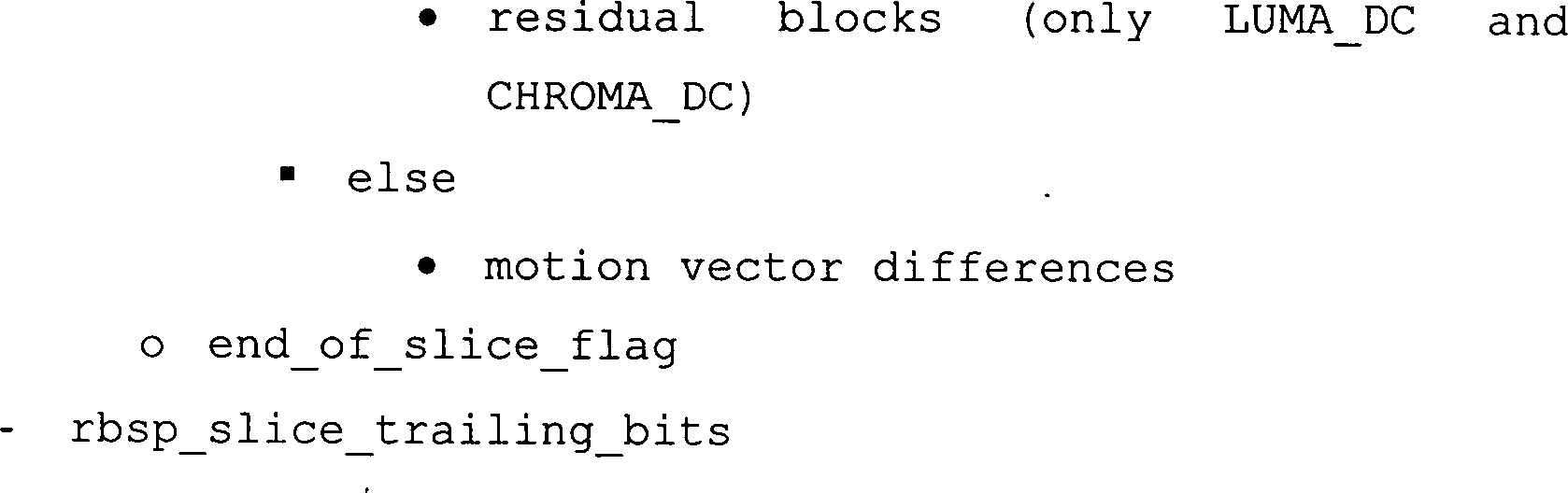
Die
Bewegungsfeld-Beschreibungen werden unter Verwendung eines Teilsatzes
der H.264/AVC-Sliceschichtsyntax, die die folgende Syntaxelemente
aufweist, codiert:
- – slice header A (mit geänderter
Bedeutung bestimmter Elemente)
- – slice
data (subset)
-
Die
Bewegungsvector-Prädiktoren
werden wie im Standard spezifiziert abgeleitet.
-
Bezüglich der
Restbilder (Hochpass-Signale) sei darauf hingewiesen, dass die Restbilder
unter Verwendung eines Teilsatzes der H.264/AVC-Slice-Schicht-Syntax
codiert werden, die folgende Syntaxelemente umfasst:
- – slice
header A (mit geänderter
Bedeutung bestimmter Elemente)
- – slice
data (subset)
-
Im
Hinblick auf die Intra-Bilder (Tiefpaß-Signale) sei darauf hingewiesen,
dass dieselben allgemein unter Verwendung der Syntax des Standards
codiert werden. In der einfachsten Form werden die Tiefpass-Bilder von
jeder Bildergruppe unabhängig
als Intra-Bilder codiert. Die Codier-Effizienz kann verbessert werden,
wenn die Korrelationen zwischen den Tiefpass-Bildern aufeinanderfolgender
Bildergruppen ausgenutzt werden. Somit werden in einer allgemeineren
Form die Tiefpass-Bilder als P-Bilder unter Verwendung rekonstruier ter
Tiefpass-Bilder vorhergehender Bildergruppen als Referenzen codiert.
Intra- (IDR-)Bilder werden in regulären Intervallen eingesetzt,
um zufällige
Zugriffspunkte zu schaffen. Die Tiefpass-Bilder werden decodiert
und rekonstruiert, wie es im Standard spezifiziert ist, und zwar
unter Verwendung der Deblocking-Filter-Operation.
-
Wie
es bereits ausgeführt
worden ist, schafft die vorliegende Erfindung eine SNR-Skalierbarkeit.
Die Struktur in Form einer offenen statt einer geschlossenen Schleife
des Subband-Lösungsansatzes
liefert die Möglichkeit,
eine SNR-Skalierbarkeit
effizient und in weiten Stücken
standardkonform unterzubringen. Es wird eine SNR-Skalierbare-Erweiterung erreicht,
bei der die Basisschicht so codiert wird, wie es vorstehend beschrieben
wird, und bei der die Erweiterungs-Schichten aus Verbesserungsbildern
für die
Subband-Signale bestehen, die selber wieder wie für die Residual-Bild-Syntax
vorgesehen codiert werden.
-
Auf
der Codiererseite werden Rekonstruktions-Fehlerbilder zwischen den
ursprünglichen
Subband-Bildern, die durch die Analysefilterband erzeugt werden,
und den rekonstruierten Subband-Bildern, die nach dem Decodieren
der Basisschicht oder einer vorherigen Erweiterungsschicht erzeugt
werden, erzeugt. Diese Rekonstruktions-Fehlerbilder werden unter
Verwendung eines kleineren Quantisierungs-Parameters als in der
Basis-Skalierungsschicht oder einer oder mehreren vorherigen Erweiterungs-Skalierungsschichten quantisiert
und codiert, und zwar unter Verwendung der Restbild-Syntax, die
vorstehend dargelegt worden ist. Auf der Decodiererseite können die
Subband-Darstellung der Basisschicht und die Verbesserungssignale
verschiedener Erweiterungsschichten unabhängig voneinander decodiert
werden, wobei die schließliche
Erweiterungsschicht-Subbanddarstellung erhalten wird, indem die
Basisschicht-Rekonstruktion und rekonstruierte Verbesserungssignale
der Erweiterungsschichten für
alle zeitlichen Subbänder
aufaddiert werden.
-
Es
sei darauf hingewiesen, dass Verhaltensverluste im Vergleich zu
nicht-skalierten Anwendungen vergleichsweise klein sind, wenn die
Quantisierungsparameter um einen Wert von 6 von einer Schicht zur nächsten verringert
werden. Diese Halbierung der Quantisierungsschrittweite resultiert
etwa in einer Verdoppelung der Bitrate von einer Erweiterungsskalierungsschicht
zur nächsten
Erweiterungsskalierungsschicht bzw. von der Basis-Skalierungsschicht
zur ersten Erweiterungsskalierungsschicht.
-
An
dieser Stelle sei darauf hingewiesen, dass die anhand der 5 und 6 dargestellten verschiedenen Skalierungen,
nämlich
der Zeitskalierung und der SNR-Skalierung kombiniert werden können, dahingehend, dass
ein zeitlich skalierter Datenstrom selbstverständlich noch SNR-skaliert sein
kann.
-
Nachfolgend
werden noch auf bestimmte Betriebscodierer Steuerungsmöglichkeiten
eingegangen. Zunächst
werden bevorzugte Quantisierungsparameter dargestellt. Wenn die
Bewegung vernachlässigt
wird und wenn die Bitverschiebung nach rechts im Aktualisierungsschritt,
wie sie vorstehend dargelegt worden ist, durch eine reelwertige
Multiplikation mit einem Faktor 1/2 ersetzt wird, kann der grundsätzliche
Zwei-Kanal-Analyse-Schritt normiert werden, indem die Hochpaß-Abtastwerte
des Bilds H mit einem Faktor 1/sqrt(2) multipliziert werden, und
indem die Hochpaß-Abtastwerte
mit einem Faktor sqrt(2) multipliziert werden.
-
Vorzugsweise
wird diese Normierung in der Realisierung der Analyse-Filterbank
und der Sythese-Filterbank vernachlässigt, um den Bereich der Abtastwerte
nahezu konstant zu halten. Sie wird jedoch berücksichtigt während der
Quantisierung der zeitlichen Subbänder. Für die grundsätzliche
Zwei-Kanal-Analyse-Synthese-Filterbank kann dies ohne weiteres erreicht
werden, indem das Tiefpass-Signal mit der Hälfte der Quantisierungsschrittweite
quantisiert wird, die zum Quantisieren des Hochpass-Signals verwendet
wird. Dies führt zu
folgender Quantisierer-Auswahl für
die spezifizierte dyadische Zerlegungsstruktur einer Gruppe von
2n Bildern: Es sei QPL (n) der
Quantisierungsparameter, der zum Codieren des Tiefpass-Bildes verwendet
wird, das nach der n-ten Zerlegungsstufe erhalten wird.
-
Die
Quantisierungsparameter, die zum Codieren der Hochpass-Bilder verwendet
werden, die nach der i-ten Zerlegungsstufe erhalten werden, werden
folgendermaßen
berechnet QPH(i) = QPL(n) + 3·(n + 2 – i)
-
Der
Quantisierungsparameter QPintra(i), der
zum Quantisieren der Intra-Prädiktionssignale
der Bewegungsfeld-Beschreibung M(i-1)0 verwendet
wird, welche in der i-ten Zerlegungsstufe verwendet werden, werden aus
dem Quantisierungsparameter QPHi für die Hochpass-Bilder
abgeleitet, die in dieser Zerlegungsstufe erzeugt werden, durch
folgende Gleichung: QPINTRA(i) =
QPH(i) – 6.
-
Die
Bewegungsfeldbeschreibungen Mi0 und Mi 1, die in dem Prädiktionsschritt
einerseits und dem Aktualisierungsschritt andererseits verwendet
werden, werden vorzugsweise unabhängig voneinander geschätzt. Nachfolgend
wird der Prozeß zum
Schätzen
der Bewegungsfeldbeschreibung Mi0, der im
Prädiktionsschritt
verwendet wird, beschrieben. Der Prozeß zum Schätzen von Mi1 wird
erhalten, indem die ursprünglichen Bilder
A und B ausgetauscht werden, und indem der INTRA-Modus aus dem Satz von möglichen
Macroblock-Modi entfernt wird.
-
Die
Bilder A und B seien gegeben, die entweder ursprüngliche Bilder sind, oder Bilder,
die Tiefpaß-Signale
darstellen, die in einer vorherigen Analyse-Stufe erzeugt werden.
Ferner werden die entsprechenden Arrays von Luma-Abtastwerten a[] und b[] bereitgestellt.
Die Bewegungsbe schreibung M
i0 wird in einer
Makroblock-weisen Art und Weise folgendermaßen geschätzt:
Für alle möglichen Makroblock- und Sub-Makroblock-Teilungen
eines Makroblocks i innerhalb des Bildes B werden die zugeordneten
Bewegungsvektoren
mi =
[mx, my]T durch Minimieren des Lagrange-Funktionals
bestimmt,
wobei der
Verzerrungsterm folgendermaßen
gegeben ist:
-
Hierbei
spezifiziert S den Bewegungsvektor-Suchbereich innerhalb des Referenzbildes
A. P ist der Bereich, der durch die betrachtete Makroblock-Teilung
oder Sub-Makroblock-Teilung überstrichen
wird. R (i, m) spezifiziert die Anzahl von Bits, die benötigt werden,
um alle Komponenten des Bewegungsvektors m zu übertragen, wobei ein fester
Lagrange-Multiplizierer ist.
-
Die
Bewegungssuche schreitet zunächst über alle
Ganzzahl-Abtastwert-genauen
Bewegungsvektoren in dem gegebenen Suchbereich S fort. Dann, unter
Verwendung des besten Ganzzahl-Bewegungsvektors werden
die 8 umgebenden Halb-Abtastwertgenauen Bewegungsvektoren getestet.
Schließlich
wird unter Verwendung des besten Halb-Abtastwert-genauen Bewegungsvektors
die 8 umgebenden Viertel-Abtastwert-genauen Bewegungsvektoren getestet.
Für die
Halb- und die Viertel- Abtastwert-genaue Bewegungsvektor-Verbesserung
wird der Term a[x-mx,y – my] als Interpolationsoperator interpretiert.
-
Die
Modus Entscheidung für
den Makroblock-Modus und den Sub-Makroblock-Modus folgt grundsätzlich demselben
Lösungsansatz.
Von einem gegebenen Satz von möglichen
Makroblock- oder
Sub-Makroblock-Modi S-
mode. wird der Modus
p
i der das folgende Lagrange-Funktional
minimiert, ausgewählt:
-
Der
Verzerrungsterm ist folgendermaßen
gegeben:
wobei P den Makroblock oder
Sub-Makroblock-Bereich spezifiziert, und wobei n[p, x, y] der Bewegungsvektor ist,
der dem Makroblock- oder Sub-Makroblock-Modus p und der Teilung
oder Sub-Makroblock-Teilung zugeordnet ist, die die Luma-Position (xy) umfaßt.
-
Der
Ratenterm R (ip) stellt die Anzahl von Bits dar, die der Wahl des
Codiermodus p zugeordnet sind. Für
die Bewegungskompensierten Codiermodi umfasst derselbe die Bits
für den
Makroblock-Modus (falls zutreffend), den bzw. die Sub-Makroblock-Modi
(falls zutreffend) und den bzw. die Bewegungsvektoren. Für den Intra-Modus
umfasst derselbe die Bits für
den Makroblock-Modus und die Arrays von quantisierten Luma- und Chroma-Transformation-Koeffizienten
Pegeln.
-
Der
Satz von möglichen
Sub-Makroblock-Modi wird durch
{P_8×8, P_8×4, P_4×8, P_4×4}
gegeben. Der Satz
von möglichen
Makroblock-Modi wird durch
{P_16×16, P_16×8, P_8×16, P_8×8, INTRA}
gegeben, wobei
der Intra-Modus nur verwendet wird, wenn eine Bewegungsfeldbeschreibung
Mi0, die für den Prädiktionsschritt verwendet wird,
geschätzt
wird.
-
Der
Lagrange-Multiplizierer λ wird
abhängig
von dem Basisschicht-Quantisierungs-Parameter für das bzw. die Hochpass-Bilder QPhi der
Zerlegungsstufe, für
die das Bewegungsfeld geschätzt
wird, gemäß folgender
Gleichung gesetzt: λ = 0.33·2^(QPHi/3 – 4)
-
Die
grundsätzliche
Zwei-Kanal-Analyse Filterbank zerlegt zwei Eingangsbilder A, B in
ein Tiefpass-Bild L und ein Hochpass-Bild H. Gemäß der Notation in diesem Dokument
verwendet das Tiefpass-Bild L das Koordinatensystem des ursprünglichen
Bildes A. Wird somit eine perfekte (fehlerfreie) Bewegungskompensation angenommen,
sind die Bilder A und L identisch.
-
Die
Zerlegungsstruktur, die in 4 dargelegt
ist, wird erhalten, wenn in allen Zerlegungsstufen die ganzzahligen
Eingangsbilder bei zeitlichen Abtastpositionen 0, 2, 4,... als Eingangsbilder
A behandelt werden, und wenn die ungeradzahligen Eingangsbilder
bei Abtastpositionen 1, 3, 5, ... als Eingangsbilder B behandelt werden.
Dieses Schema ermöglicht
eine optimale zeitliche Skalierbarkeit. Der zeitliche Abstand zwischen
den Bildern, die in jeder Zwei-Kanal-Analyse
Filterbank zerlegt werden, wird jedoch um einen Faktor 2 von einer Zerlegungsstufe
zur nächsten
erhöht.
Es ist ferner bekannt, dass der Wirkungsgrad der bewegungskompensierten
Prädiktion
abnimmt, wenn der zeitliche Abstand zwischen dem Referenzbild und
dem zu prädizierenden
Bild zunimmt.
-
Erfindungsgemäß wird es
bevorzugt, Zerlegungsschemen zu realisieren, bei denen der zeitliche
Abstand zwischen den Bildern, die durch die Zwei-Kanal-Filterbank
zerlegt wer den, um einen Faktor kleiner als 2 von einer Zerlegungsstufe
zur nächsten
erhöht
wird. Diese Schemen liefern jedoch nicht das Merkmal der optimalen
zeitlichen Skalierbarkeit, da die Abstände zwischen benachbarten Tiefpaß-Filtern
in den meisten Zerlegungsstufen varieren.
-
Erfindungsgemäß wird das
in 8 gezeigte Zerlegungsschema
verwendet, von dem ausgegangen wird, dass es einen vernünftigen
Kompromiß zwischen
zeitlicher Skalierbarkeit und Codier-Wirkungsgrad ermöglicht.
Die Sequenz der ursprünglichen
Bilder wird als Sequenz von Eingangsbildern A, B, A, B, A, B...
A, B behandelt. Somit liefert dieses Schema eine Stufe mit optimaler
zeitlicher Skalierbarkeit (gleicher Abstand zwischen den Tiefpass-Bildern).
Die Sequenz von Tiefpass-Bildern, die als Eingangs-Signal in alle
folgenden Zerlegungsstufen verwendet werden, werden als Sequenzen
von Eingangsbildern B, A, A, B, B, A ... A, B behandelt, wodurch
die Abstände
zwischen den Tiefpass-Bildern, die zerlegt werden in dem folgenden
Zwei-Kanal-Analyse-Schema, kleingehalten werden, wie es in 8 zu sehen ist.
-
Bei
einem bevorzugten Ausführungsbeispiel
der vorliegenden Erfindung werden die Bewegungsfelder Mi0 und
Mi 1, die in dem
Prädiktions-Schritt
bzw. den Aktualisierungsschritt verwendet werden, unabhängig voneinander
geschätzt
und codiert. Dies kann möglicherweise
dazu führen,
dass die Bit-Rate, die benötigt
wird, um die Bewegungsparameter zu übertragen, erhöht wird.
Möglicherweise
existiert jedoch auch ein negativer Einfluß auf die Konnektivität dieser
zwei Bewegungsfelder, die einen wichtigen Einfluß auf den Codierwirkungsgrad
des Sub-Band-Lösungsansatzes
haben kann. Daher wird es bevorzugt, dass im Sinne der Verbesserung
des Codierer-Wirkungsgrades
die Bewegungsfelder Mi 1,
die im Aktualisierungsschritt verwendet werden, nicht unabhängig voneinander
geschätzt
und codiert werden, sondern von den Bewegungsfeldern Mi0,
die in den Prädiktionsschritten
berechnet werden, abgeleitet werden, dahingehend, dass sie noch
eine blockweise Bewegung darstellen, die mit der H.264/AVC- Spezifikation kompatibel
ist. Als zusätzlichen
Seiteneffekt wird dies ebenfalls die Komplexität reduzieren, die für den Aktualisierungsschritt
benötigt
wird.
-
Die
gegenwärtige
Analyse/Synthese-Struktur stellt eine Lifting-Darstellung der einfachen
Haar-Filter bei einem bevorzugten Ausführungsbeispiel der vorliegenden
Erfindung dar. Dieses Schema wird bei einem anderen Ausführungsbeispiel
auf eine Lifting-Darstellung mit bi-orthogonalen 5/3-Filtern erweitert,
was zu einer bi-direktionalen Bewegungskompensierten Prädiktion
führt.
Der bevorzugteste Lösungsansatz
besteht in einem adaptiven Umschalten zwischen dem Lifting-Darstellungen
der Haar-Filter und der 5/3-Filter auf einer Blockbasis, wobei vorzugsweise
ferner die bewegungskompensierte Prädiktion, wie sie für B-Slices
in H.264/AVC spezifiziert ist, eingesetzt werden kann.
-
Zusätzlich wird
es bevorzugt, die Größe der Gruppen
von Bildern für
die zeitliche Subbandzerlegung adaptiv auszuwählen.
-
Da
die Verwendung von mehreren Referenzbildern das Verhalten von Prädiktions-Basierten
Videocodierschemen beträchtlich
verbessert hat, wird auch eine Aufnahme dieses Lösungsansatzes in ein Subbandschema
bevorzugt.
-
Ferner
wird die Verwendung eines geeigneten Bitzuordnungsalgorithmus bevorzugt,
der SNR-Schwankungen innerhalb einer Gruppe von Bildern reduziert,
die bei bestimmten Testsequenzen auftreten können.
-
Ferner
wird es bevorzugt, neue Techniken zur Transformations-Koeffizienten-Codierung
zu verwenden, die die SNR-Skalierbarkeit
verbessern und einen zusätzlichen
Grad an räumlicher
Skalierbarkeit liefern.
-
Abhängig von
den Gegebenheiten kann das erfindungsgemäße Verfahren zum Codieren,
zum Decodieren, zum Filtern bzw. zum inversen Filtern in Hardware
oder in Software implementiert werden. Die Implementierung kann
auf einem digitalen Speichermedium, insbesondere einer Diskette
oder CD mit elektronisch auslesbaren Steuersignalen erfolgen, die
so mit einem programmierbaren Computersystem zusammenwirken können, dass
das Verfahren ausgeführt
wird. Allgemein besteht die Erfindung somit auch in einem Computer-Programm-Produkt
mit einem auf einem Maschinen-lesbaren Träger-gespeicherten Programmcode
zur Durchführung
des erfindungsgemäßen Verfahrens,
wenn das Computer-Programm-Produkt auf einem Rechner abläuft. In
anderen Worten ausgedrückt,
kann die Erfindung somit auf einem Computer-Programm mit einem Programmcode
zur Durchführung
des Verfahrens realisiert werden, wenn das Computer-Programm auf einem
Computer abläuft.