CN216365710U - 一种新型智能护理机器人 - Google Patents
一种新型智能护理机器人 Download PDFInfo
- Publication number
- CN216365710U CN216365710U CN202122306757.1U CN202122306757U CN216365710U CN 216365710 U CN216365710 U CN 216365710U CN 202122306757 U CN202122306757 U CN 202122306757U CN 216365710 U CN216365710 U CN 216365710U
- Authority
- CN
- China
- Prior art keywords
- fixedly connected
- placing
- novel intelligent
- plate
- fixing block
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


Abstract
本实用新型公开了一种新型智能护理机器人,包括主体,所述主体的一侧开设有第一开口,第一开口处设有放置箱,放置箱的内部滑动连接有若干放置板,所述放置箱的内部焊接有固定板,固定板的一侧开设有若干条形通孔,所述放置板贯穿条形通孔,所述固定板的一侧固定连接有若干推拉式电磁铁,推拉式电磁铁的推杆底端焊接有第二固定块。本实用新型通过设置第一固定块、第二固定块和推拉式电磁铁,在放置板上放置药物,将装置推到病房之后,到时间可以启动推拉式电磁铁使其拉动第二固定块,此时第二固定块离开第一固定块,从而可以抽出放置板,病人可以拿取放置板上的药物,便于病人及时取药,同时避免了医师与病人直接接触,造成疾病传播。
Description
技术领域
本实用新型涉及牙科综合治疗机技术领域,尤其涉及一种新型智能护理机器人。
背景技术
医生,钻研学习医学科学技术,挽救生命以治病为业的人,一般指临床医生,医生是一个崇高的职业,治病救人是医生的职责,医生救人小到门诊,大到手术,随着科技的发展,医学越发发达,人们对智能医药的要求也逐渐提高。
在医院一般都是药师抓取患者所需的药物,由药师当面交予患者,这种方式效率过低,患者无法及时拿到所需药物,同时容易造成疾病传染。
实用新型内容
本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种新型智能护理机器人。
为了实现上述目的,本实用新型采用了如下技术方案:
一种新型智能护理机器人,包括主体,所述主体的一侧开设有第一开口,第一开口处设有放置箱,放置箱的内部滑动连接有若干放置板,所述放置箱的内部焊接有固定板,固定板的一侧开设有若干条形通孔,所述放置板贯穿条形通孔,所述固定板的一侧固定连接有若干推拉式电磁铁,推拉式电磁铁的推杆底端焊接有第二固定块,所述放置板的一侧焊接有第一固定块。
进一步的,所述放置板的一侧顶端焊接有挡板,所述挡板的一侧焊接有拉杆。
进一步的,所述第一固定块的顶端一侧和所述第二固定块的底端一侧均呈弧形。
进一步的,所述主体的内部转动连接有转动柱,转动柱的两端均延伸至所述主体的外部,所述转动柱的两端均固定连接有滚轮,所述主体的一侧焊接有推杆,所述主体的底端一侧设有万向轮。
进一步的,所述转动柱的外部焊接有若干卡块,所述主体的内部焊接有定位板,定位板的顶端开设有定位孔,定位孔的内部设有卡杆,卡杆的顶端焊接有移动杆,所述主体的一侧开设有第二开口,移动杆的一端贯穿第二开口。
进一步的,所述主体的顶端设有摄像头。
进一步的,所述放置板的顶端焊接有若干隔板。
进一步的,所述放置箱的内部转动连接有支撑轮,支撑轮处于所述放置板的底端,放置板的一端一侧焊接有限位块。
本实用新型的有益效果为:
1、通过设置第一固定块、第二固定块和推拉式电磁铁,在放置板上放置药物,将装置推到病房之后,到时间可以启动推拉式电磁铁使其拉动第二固定块,此时第二固定块离开第一固定块,从而可以抽出放置板,病人可以拿取放置板上的药物,便于病人及时取药,同时避免了医师与病人直接接触,造成疾病传播;
2、通过设置一侧呈弧形的第一固定块和第二固定块,第一固定块和第二固定块呈弧形的一侧,便于放置板进入放置箱时,第一固定块和第二固定块可以相互卡合,使放置板固定;
3、通过设置卡杆和滚轮,装置可以通过滚轮和万向轮进行移动,从而便于装置移动,到达指定区域,对病人投放药品,卡杆与转动柱接触,可以在卡块的作用下使转动柱无法转动,从而使装置固定,便于装置到达指定区域之后固定,向上拉动移动杆可以使卡杆移动,从而便于装置进行移动;
4、通过设置摄像头,摄像头可以对装置进行监控,避免其他人损坏装置获取药品;
5、通过设置隔板,隔板便于对药品进行固定分隔,从而便于放置板的抽出;
6、通过设置支撑轮和限位块,支撑轮19可以对放置板17进行支撑,从而便于放置板17抽出,同时限位块20可以防止放置板17 被全部抽出。
附图说明
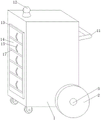
图1为实施例1提出的一种新型智能护理机器人的主视结构示意图;
图2为实施例1提出的一种新型智能护理机器人的剖视结构示意图;
图3为实施例2提出的一种新型智能护理机器人的剖视结构示意图。
图中:1主体、2滚轮、3转动柱、4卡块、5卡杆、6移动杆、7 定位板、8第一固定块、9第二固定块、10推拉式磁铁、11推杆、12 摄像头、13放置箱、14挡板、15拉杆、16隔板、17放置板、18固定板、19支撑轮、20限位块。
具体实施方式
下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
下面详细描述本专利的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本专利,而不能理解为对本专利的限制。
在本专利的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本专利和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本专利的限制。
在本专利的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“设置”应做广义理解,例如,可以是固定相连、设置,也可以是可拆卸连接、设置,或一体地连接、设置。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本专利中的具体含义。
实施例1
参照图1-2,一种新型智能护理机器人,包括主体1,主体1的一侧开设有第一开口,第一开口处设有放置箱13,放置箱13的内部滑动连接有若干放置板17,放置箱13的内部焊接有固定板18,固定板18的一侧开设有若干条形通孔,放置板17贯穿条形通孔,固定板 18的一侧固定连接有若干推拉式电磁铁10,推拉式电磁铁10的推杆底端焊接有第二固定块9,放置板17的一侧焊接有第一固定块8,通过第一固定块9将第一固定块8固定,使放置板17无法从放置箱13 之中抽出,可以在放置板17上放置药物,将装置推到病房之后,到时间可以启动推拉式电磁铁10使其拉动第二固定块9,此时第二固定块9离开第一固定块8,从而可以抽出放置板17,病人可以拿取放置板17上的药物,便于病人及时取药,同时避免了医师与病人直接接触,造成疾病传播。
其中,放置板17的一侧顶端焊接有挡板14,挡板14的一侧焊接有拉杆15,通过拉杆15便于拉动放置板17,从而便于放置板17 的移动,便于病人取药。
其中,第一固定块8的顶端一侧和第二固定块9的底端一侧均呈弧形,通过呈弧形的一侧,便于放置板17进入放置箱13时,第一固定块8和第二固定块9可以相互卡合,使放置板17固定。
其中,主体1的内部转动连接有转动柱3,转动柱3的两端均延伸至主体1的外部,转动柱3的两端均固定连接有滚轮2,主体1的一侧焊接有推杆11,主体1的底端一侧设有万向轮,通过推杆11可以推动装置移动,装置可以通过滚轮2和万向轮进行移动,从而便于装置移动,到达指定区域,对病人投放药品。
其中,转动柱3的外部焊接有若干卡块4,主体1的内部焊接有定位板7,定位板7的顶端开设有定位孔,定位孔的内部设有卡杆5,卡杆5的顶端焊接有移动杆6,主体1的一侧开设有第二开口,移动杆6的一端贯穿第二开口,通过卡杆5与转动柱3接触,可以在卡块 4的作用下使转动柱3无法转动,从而使装置固定,便于装置到达指定区域之后固定,向上拉动移动杆6可以使卡杆5移动,从而便于装置进行移动。
其中,主体1的顶端设有摄像头12,通过摄像头12可以对装置进行监控,避免其他人损坏装置获取药品。
其中,放置板17的顶端焊接有若干隔板16,通过隔板16便于对药品进行固定分隔,从而便于放置板17的抽出。
工作原理:通过第一固定块9将第一固定块8固定,使放置板 17无法从放置箱13之中抽出,可以在放置板17上放置药物,将装置推到病房之后,到时间可以启动推拉式电磁铁10使其拉动第二固定块9,此时第二固定块9离开第一固定块8,从而可以抽出放置板 17,病人可以拿取放置板17上的药物,便于病人及时取药,同时避免了医师与病人直接接触,造成疾病传播;
通过拉杆15便于拉动放置板17,从而便于放置板17的移动,便于病人取药;
通过第一固定块8和第二固定块9呈弧形的一侧,便于放置板 17进入放置箱13时,第一固定块8和第二固定块9可以相互卡合,使放置板17固定;
通过推杆11可以推动装置移动,装置可以通过滚轮2和万向轮进行移动,从而便于装置移动,到达指定区域,对病人投放药品;
通过卡杆5与转动柱3接触,可以在卡块4的作用下使转动柱3 无法转动,从而使装置固定,便于装置到达指定区域之后固定,向上拉动移动杆6可以使卡杆5移动,从而便于装置进行移动;
通过摄像头12可以对装置进行监控,避免其他人损坏装置获取药品;
通过隔板16便于对药品进行固定分隔,从而便于放置板17的抽出。
实施例2
参照图3,一种新型智能护理机器人,本实施例相较于实施例1,为了增加装置的实用性,放置箱13的内部转动连接有支撑轮19,支撑轮19处于放置板17的底端,放置板17的一端一侧焊接有限位块 20,通过支撑轮19可以对放置板17进行支撑,从而便于放置板17 抽出,同时限位块20可以防止放置板17被全部抽出。
工作原理:通过第一固定块9将第一固定块8固定,使放置板17无法从放置箱13之中抽出,可以在放置板17上放置药物,将装置推到病房之后,到时间可以启动推拉式电磁铁10使其拉动第二固定块9,此时第二固定块9离开第一固定块8,从而可以抽出放置板 17,病人可以拿取放置板17上的药物,便于病人及时取药,同时避免了医师与病人直接接触,造成疾病传播;
通过拉杆15便于拉动放置板17,从而便于放置板17的移动,便于病人取药;
通过第一固定块8和第二固定块9呈弧形的一侧,便于放置板 17进入放置箱13时,第一固定块8和第二固定块9可以相互卡合,使放置板17固定;
通过推杆11可以推动装置移动,装置可以通过滚轮2和万向轮进行移动,从而便于装置移动,到达指定区域,对病人投放药品;
通过卡杆5与转动柱3接触,可以在卡块4的作用下使转动柱3 无法转动,从而使装置固定,便于装置到达指定区域之后固定,向上拉动移动杆6可以使卡杆5移动,从而便于装置进行移动;
通过摄像头12可以对装置进行监控,避免其他人损坏装置获取药品;
通过隔板16便于对药品进行固定分隔,从而便于放置板17的抽出;
通过支撑轮19可以对放置板17进行支撑,从而便于放置板17 抽出,同时限位块20可以防止放置板17被全部抽出。
以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
Claims (8)
1.一种新型智能护理机器人,包括主体(1),其特征在于,所述主体(1)的一侧开设有第一开口,第一开口处设有放置箱(13),放置箱(13)的内部滑动连接有若干放置板(17),所述放置箱(13)的内部固定连接有固定板(18),固定板(18)的一侧开设有若干条形通孔,所述放置板(17)贯穿条形通孔,所述固定板(18)的一侧固定连接有若干推拉式电磁铁(10),推拉式电磁铁(10)的推杆底端固定连接有第二固定块(9),所述放置板(17)的一侧固定连接有第一固定块(8)。
2.根据权利要求1所述的一种新型智能护理机器人,其特征在于,所述放置板(17)的一侧顶端固定连接有挡板(14),所述挡板(14)的一侧固定连接有拉杆(15)。
3.根据权利要求1所述的一种新型智能护理机器人,其特征在于,所述第一固定块(8)的顶端一侧和所述第二固定块(9)的底端一侧均呈弧形。
4.根据权利要求1所述的一种新型智能护理机器人,其特征在于,所述主体(1)的内部转动连接有转动柱(3),转动柱(3)的两端均延伸至所述主体(1)的外部,所述转动柱(3)的两端均固定连接有滚轮(2),所述主体(1)的一侧固定连接有推杆(11),所述主体(1)的底端一侧设有万向轮。
5.根据权利要求4所述的一种新型智能护理机器人,其特征在于,所述转动柱(3)的外部固定连接有若干卡块(4),所述主体(1)的内部固定连接有定位板(7),定位板(7)的顶端开设有定位孔,定位孔的内部设有卡杆(5),卡杆(5)的顶端固定连接有移动杆(6),所述主体(1)的一侧开设有第二开口,移动杆(6)的一端贯穿第二开口。
6.根据权利要求1所述的一种新型智能护理机器人,其特征在于,所述主体(1)的顶端设有摄像头(12)。
7.根据权利要求1所述的一种新型智能护理机器人,其特征在于,所述放置板(17)的顶端固定连接有若干隔板(16)。
8.根据权利要求1所述的一种新型智能护理机器人,其特征在于,所述放置箱(13)的内部转动连接有支撑轮(19),支撑轮(19)处于所述放置板(17)的底端,放置板(17)的一端一侧固定连接有限位块(20)。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202122306757.1U CN216365710U (zh) | 2021-09-23 | 2021-09-23 | 一种新型智能护理机器人 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202122306757.1U CN216365710U (zh) | 2021-09-23 | 2021-09-23 | 一种新型智能护理机器人 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN216365710U true CN216365710U (zh) | 2022-04-26 |
Family
ID=81242211
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202122306757.1U Active CN216365710U (zh) | 2021-09-23 | 2021-09-23 | 一种新型智能护理机器人 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN216365710U (zh) |
-
2021
- 2021-09-23 CN CN202122306757.1U patent/CN216365710U/zh active Active
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN210612229U (zh) | 一种手术室麻醉护理装置 | |
| CN216365710U (zh) | 一种新型智能护理机器人 | |
| CN213851539U (zh) | 一种重症监护床 | |
| CN106344172A (zh) | 一种采血桌 | |
| CN210785045U (zh) | 一种急症科护理转运设备 | |
| CN213994019U (zh) | 一种用于病床的侧翻结构 | |
| CN211934572U (zh) | 一种新型临床医学急救辅助装置 | |
| CN211485361U (zh) | 一种小儿重症检查护理辅助装置 | |
| CN220344645U (zh) | 多功能转运急救置物架 | |
| CN206714958U (zh) | 一种安全型注射器放置支架 | |
| CN214074055U (zh) | 一种可以放pad的治疗车 | |
| CN217660149U (zh) | 一种医用手术室护理架 | |
| CN211187850U (zh) | 一种放射科用推车 | |
| CN212016065U (zh) | 一种心内科多功能护理架 | |
| CN216221654U (zh) | 一种医用折叠式推车 | |
| CN214910353U (zh) | 一种医学外科用熏蒸装置 | |
| CN219049208U (zh) | 一种多功能危重病人转运床 | |
| CN205849704U (zh) | 一种床旁护理车 | |
| CN213758572U (zh) | 一种手术室麻醉护理用装置 | |
| CN214632802U (zh) | 一种造口伤口换药车 | |
| CN215130265U (zh) | 一种手术室麻醉护理盘 | |
| CN110215368B (zh) | 一种用于眼科的便于使用型推车 | |
| CN215193313U (zh) | 一种内分泌科用医疗护理支架 | |
| CN215840150U (zh) | 一种icu用置物筐 | |
| CN219814576U (zh) | 一种急危重症护理用病人转运装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant |