CN215584753U - 一种下肢康复机中的脚步摆动机构 - Google Patents
一种下肢康复机中的脚步摆动机构 Download PDFInfo
- Publication number
- CN215584753U CN215584753U CN202120684003.7U CN202120684003U CN215584753U CN 215584753 U CN215584753 U CN 215584753U CN 202120684003 U CN202120684003 U CN 202120684003U CN 215584753 U CN215584753 U CN 215584753U
- Authority
- CN
- China
- Prior art keywords
- sole
- pushing
- supporting
- support
- recovered
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
















Landscapes
- Rehabilitation Tools (AREA)
Abstract
本实用新型涉及一种下肢康复机中的脚步摆动机构,包括用于放置患者脚掌的两组康复脚板,所述两组康复脚板板面竖直且分别设置在脚掌支撑机构上,所述脚掌支撑机构用于实施对两组康复脚板的支撑,所述脚掌支撑机构设置在脚掌摆动机构上,所述脚掌摆动机构驱动两组康复脚板呈现分离或者靠近的两种动作状态;所述两组康复脚板之间平行间隔布置,两组康复脚板的脚跟位置通过脚掌支撑机构活动式设置在脚掌摆动机构上,患者的双脚抵靠在康复脚板上,通过脚掌支撑机构实施对康复脚板的支撑,使得脚掌摆动机构动作,以联动双康复脚板呈现分离或者靠近的两种动作状态,该摆动机构模拟实际的步态训练,减少了患者随意移动产生的风险,有助于患者的康复训练。
Description
技术领域
本实用新型涉及康复机器人设备技术领域,具体涉及一种下肢康复机中的脚步摆动机构。
背景技术
随着人口的老龄化加剧,脑卒中等病症发病人群越来越多,康复也越来越受到重视,康复治疗技术迅速发展,对于康复训练的设备要求也越来越高。传统的康复训练设备中,有关节被动活动仪、上下肢康复器和减重步态训练系统,可对康复早期的患者进康复训练。
关节被动活动仪能有效消除关节粘连,改善关节活动度,防止关节僵硬、肌肉萎缩、退行性和创伤性关节炎的发生,促进关节滑液的循环。上下肢康复器可以加强患侧肌力、肌耐力训练,从而预防肌肉萎缩扩大关节活动角度,增加关节周围保护,防止关节痉挛,增强心肺功能训练,可实施渐进性训练以达到分段康复目标。减重步训设备可以在康复早期给患者提供正确的步行感觉,促进患者本体感觉神经元兴奋,是大脑的感觉活动中枢对瘫痪肌肉产生新的感知,从而有可能帮助患者正确控制肌肉活动。
中风早期患者大脑的可塑性最强,治疗效果最好,尽早进行步行训练可以有效的促进大脑功能重组和激活闲置神经通路,使患者的肢体功能得以最好的恢复。
目前的康复初期训练设备中,关节康复器和上下肢康复训练器不是针对于步态训练的设备,对于步态的康复作用不明显,减重步态台虽然能够对患者进行完整的步态训练,但设备本身使用较复杂,需要将患者转移到设备上,对于康复初期的患者,存在一定的风险。
实用新型内容
本实用新型的目的是:提供一种下肢康复机中的脚步摆动机构,可以在看复训练时将设备放置在患者床尾,患者可以躺在床上进行步态训练,使用方便,并且没有意外的风险,以实现对患者下肢的康复锻炼。
为实现上述目的,本实用新型采用的技术方案是:
下肢康复机中的脚步摆动机构,包括用于放置患者脚掌的两组康复脚板,所述两组康复脚板板面竖直且分别设置在脚掌支撑机构上,所述脚掌支撑机构用于实施对两组康复脚板的支撑,所述脚掌支撑机构设置在脚掌摆动机构上,所述脚掌摆动机构驱动两组康复脚板呈现分离或者靠近的两种动作状态;所述两组康复脚板之间平行间隔布置,两组康复脚板的脚跟位置通过脚掌支撑机构活动式设置在脚掌摆动机构上。
本实用新型还存在以下方案:
所述脚掌支撑机构包括设置在康复脚板脚跟位置的第一支撑滑杆,所述第一支撑滑杆竖直滑动设置在支撑机架上,所述康复脚板脚尖下板面设置有第二支撑滑杆,所述第二支撑滑杆滑动设置在弹性支撑单元上,所述弹性支撑单元用于实施对第二支撑滑杆的弹性支撑。
所述康复脚板脚尖下板面铰接设置有连接座,所述第二支撑滑杆呈弧杆状且一端固定在连接座上。
所述康复脚板的脚跟位置两侧设置有转动滑杆,所述转动滑杆水平且与康复脚板的长度方向垂直,所述转动滑杆的一端与连接座的一端构成转动连接,所述第一支撑滑杆固定在座体上。
所述转动滑杆上套设有复位扭簧,所述复位扭簧的两端分别与座体及转动滑杆连接。
所述弹性支撑单元包括连接座,所述第二支撑滑杆一端滑动设置在支撑推头上,所述第二支撑滑杆上套设有第一推送弹簧,所述第一推送弹簧的两端分别与连接座及支撑推头抵靠,所述支撑推头水平移动且压缩第一推送弹簧。
所述支撑推头一端与推料头连接,所述推料头沿着支撑机架上滑动,所述推料头与第一推料支杆铰接,所述第一推料支杆的另一端与第二推料支杆的一端铰接,所述第二推料支杆的另一端与支撑机架铰接,所述第一推料支杆及第二推料支杆两端之前的铰接轴水平且与支撑推头的移动方向垂直。
所述支撑推头上设置有推料滑杆,所述推料头与推料滑杆构成滑动配合,所述推料滑杆上套设有第二推送弹簧,所述第二推送弹簧两端分别与支撑推头及推料头抵靠。
所述支撑机架上设置有水平滑杆,所述水平滑杆与推料滑杆平行布置。
所述脚掌摆动机构包括设置在第一推料支杆与第二推料支杆的铰接轴上的摆动连杆,所述摆动连杆与摆动动力机构连接,所述摆动动力机构驱动摆动连杆呈现摆动动作。
所述摆动连杆的杆端设置有摆动轮,所述摆动轮与摆动折板抵靠,所述摆动折板沿着康复脚板的移动方向排布。
所述摆动折板的旁侧设置有护板,所述护板与摆动折板平行布置,所述摆动轮设置在护板与摆动折板之间。
与已有技术相比,本实用新型的有益效果体现在:该康复机器人在使用时,将该设备放置在地面或者病床的床头,患者的双脚抵靠在康复脚板上,通过脚掌支撑机构实施对康复脚板的支撑,使得脚掌摆动机构动作,以联动双康复脚板呈现分离或者靠近的两种动作状态,模拟实际的步态训练,减少了患者随意移动产生的风险,有助于患者的康复训练。
附图说明
图1和图2是康复机器人的两种视角结构示意图;
图3是康复机器人的主视图;
图4是康复机器人的左视图;
图5和图6是康复机器人移出设备箱体后的两种视角结构示意图;
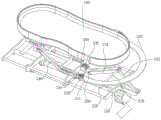
图7是康复机器人移出设备箱体后的左视图;
图8和图9是图5中单个康复脚板的两种视角结构示意图;
图10、图11和图12是单个康复板的三种视角结构示意图;
图13和图14是第一捆扎带与第二捆扎带配合的两种状态平面示意图;
图15和图16是单个插板的两种视角结构示意图;
图17是单个插板的剖面结构示意图。
具体实施方式
结合图1至图17,对本实用新型作进一步地说明:
下面结合整个康复机器人,对本发明的下肢康复机中的脚步摆动机构作详尽的说明:
康复机器人,包括用于放置患者脚掌的两组康复脚板100,所述两组康复脚板100板面竖直且分别设置在脚掌支撑机构200上,所述脚掌支撑机构200用于实施对两组康复脚板100的支撑,所述脚掌支撑机构200设置在脚掌摆动机构300上,所述脚掌摆动机构300驱动两组康复脚板100 呈现分离或者靠近的两种动作状态,所述脚掌摆动机构300与脚掌驱动机构400连接,所述脚掌驱动机构400驱动脚掌摆动机构300的动作。
结合图1至图4所示,该康复机器人在使用时,将该设备放置在地面或者病床的床头,患者的双脚抵靠在康复脚板100上,通过脚掌支撑机构 200实施对康复脚板100的支撑,启动脚掌驱动机构400,使得脚掌摆动机构300动作,以联动双康复脚板100呈现分离或者靠近的两种动作状态,模拟实际的步态训练,减少了患者随意移动产生的风险,有助于患者的康复训练。
作为本实用新型的优选方案,所述两组康复脚板100之间平行间隔布置,两组康复脚板100的脚跟位置通过脚掌支撑机构200活动式设置在脚掌摆动机构300上。
两组康复脚板100之间平行间隔布置,患者的双脚抵靠在两组康复脚板100上,随着脚掌摆动机构300的动作,实施对两组康复脚板100的动作,以连动患者足部及腿部呈现人体行走步态,以实施对患者的大腿关节的训练,并且脚掌支撑机构200的动作能够模拟患者脚掌的摆动动作,进而实施对患者脚踝关节的训练;
两组康复脚板100可同向反复动作,模拟患者的小腿屈伸动作,进而实现对患者小腿关节的康复锻炼,该康复机器人可适应不同患者的下肢康复锻炼需求。
优选地,为实施对本实用新型中两组康复脚板100、脚掌支撑机构200、脚掌摆动机构300与脚掌驱动机构400的布置,所述两组康复脚板100、脚掌支撑机构200、脚掌摆动机构300与脚掌驱动机构400均设置在设备箱体500内,所述设备箱体500的一端设置有支撑平板510,所述支撑平板510板面水平且与康复脚板100板面垂直。
在实际康复训练时,将支撑平板510搭设在患者的床头位置,患者的双脚抵靠在两组康复脚板100上,启动上述的各个机构,使得两组康复脚板100的动作,同向或者反向的动作,以实施对患者的脚步、踝关节的、小腿关节的锻炼康复,模拟患者的行走步态训练,实现竖直方向、踝关节的屈伸运动自由度,同时将患者的脚固定在康复脚板100上,可改善患者脚部内翻或者外翻的状况。
具体地,为实施对康复脚板100的活动支撑,以实施对患者脚踝的屈伸康复动作,所述脚掌支撑机构200包括设置在康复脚板100脚跟位置的第一支撑滑杆210,所述第一支撑滑杆210竖直滑动设置在支撑机架220 上,所述康复脚板100脚尖下板面设置有第二支撑滑杆230,所述第二支撑滑杆230滑动设置在弹性支撑单元上,所述弹性支撑单元用于实施对第二支撑滑杆230的弹性支撑。
在实施对患者双脚支撑时,结合图5和图6所示,患者的双脚抵靠在康复脚板100上,康复脚板100的脚跟位置的第一支撑滑杆210实施对患者的脚跟弹性支撑,脚尖下板面的第二支撑滑杆230以实施对患者脚尖位置的活动支撑,患者的双脚随着康复脚板100的移动,进而带动患者进行步态训练,实施对患者的踝关节的屈伸,模拟患者实际行走时的踝关节的动作。
为实施对患者脚尖的弹性支撑,以模拟患者在实际行走时的步态,进而实施对患者脚踝的关节屈伸,所述康复脚板100脚尖下板面铰接设置有连接座231,所述第二支撑滑杆230呈弧杆状且一端固定在连接座231上。
第二支撑滑杆230呈弧杆状且滑动设置在连接座231上,以使得康复脚板100的脚尖位置产生活动,从而实施模拟患者的脚踝屈伸动作。
优选地,为实施对患者脚跟位置的弹性支撑,所述康复脚板100的脚跟位置两侧设置有转动滑杆240,所述转动滑杆240水平且与康复脚板100 的长度方向垂直,所述转动滑杆240的一端与座体241的一端构成转动连接,所述第一支撑滑杆210固定在座体241上。
康复脚板100的脚跟位置两侧设置有转动滑杆240与座体241构成转动配合,进而使得脚尖位置的第二支撑滑杆230能够绕转动滑杆240产生转动,从而使得康复脚板100连动患者脚部呈现屈伸动作,以达到对患者脚掌康复锻炼的目的。
具体地,为实施对整个康复脚板100的复位,使得康复脚板100复位至正常的状态,所述转动滑杆240上套设有复位扭簧242,所述复位扭簧 242的两端分别与座体241及转动滑杆240连接,所述第一支撑滑杆210 上套设有支撑弹簧211,所述支撑弹簧211两端分别与支撑机架220及座体241抵靠。
为连动患者脚掌的屈伸动作,所述弹性支撑单元包括连接座231,所述第二支撑滑杆230一端滑动设置在支撑推头232上,所述第二支撑滑杆 230上套设有第一推送弹簧233,所述第一推送弹簧233的两端分别与连接座231及支撑推头232抵靠,所述支撑推头232水平移动且压缩第一推送弹簧233。
支撑推头232水平移动且压缩第一推送弹簧233的过程中,以连动第二支撑滑杆230绕转动滑杆240产生转动,以模拟患者的屈伸动作,并且第一推送弹簧233弹性挤压,实施对患者脚掌的驱动的力度更为均匀,提高患者脚部屈伸的舒适度,确保康复效果。
所述支撑推头232一端与推料头250连接,所述推料头250沿着支撑机架220上滑动,所述推料头250与第一推料支杆234铰接,所述第一推料支杆234的另一端与第二推料支杆235的一端铰接,所述第二推料支杆 235的另一端与支撑机架220铰接,所述第一推料支杆234及第二推料支杆235两端之前的铰接轴水平且与支撑推头232的移动方向垂直。
在实施对第二支撑滑杆230的驱动动作时,第一推料支杆234与第二推料支杆235产生角度的变化,从而连动支撑推头232的水平滑动,以通过第一推送弹簧233实施对第二支撑滑杆230的弹性挤压,从而实施对患者脚尖位置的弹性挤压,以模拟患者的脚步屈伸动作。
具体地,所述支撑推头232上设置有推料滑杆2321,所述推料头250 与推料滑杆2321构成滑动配合,所述推料滑杆2321上套设有第二推送弹簧2322,所述第二推送弹簧2322两端分别与支撑推头232及推料头250 抵靠。
为实施对推料头250水平滑动的支撑,所述支撑机架220上设置有水平滑杆221,所述水平滑杆221与推料滑杆2321平行布置,所述推料头250 滑动设置在推料滑杆2321上,以实施对推料头250水平滑动的支撑。
为使得患者的脚掌抵靠在康复脚板100上,康复脚板100的动作可连动患者的双脚呈现屈伸动作,所述脚掌摆动机构300包括设置在第一推料支杆234与第二推料支杆235的铰接轴上的摆动连杆310,所述摆动连杆 310与摆动动力机构连接,所述摆动动力机构驱动摆动连杆310呈现摆动动作。
当康复脚板100同向移动或者反向移动时,摆动动力机构驱动摆动连杆310呈现摆动动作,进而连动康复脚板100脚尖位置绕转动滑杆240产生转动,模拟人行走时脚踝的实际动作,实施对脚踝的屈伸动作,以实施对患者脚踝的康复锻炼。
更为具体地,结合图7所示,所述摆动连杆310的杆端设置有摆动轮 320,所述摆动轮320与摆动折板330抵靠,所述摆动折板330沿着康复脚板100的移动方向排布。
当康复脚板100同向移动或者反向移动时,所述摆动轮320与摆动折板330抵靠,并且摆动折板330沿着康复脚板100的移动方向移动,以实施对康复脚板100脚尖位置的摆动,以连动患者脚部屈伸动作。
优选地,所述摆动折板330的旁侧设置有护板340,所述护板340与摆动折板330平行布置,所述摆动轮320设置在护板340与摆动折板330 之间。
为实施对两组康复脚板100的同向及反向移动动作时,所述脚掌驱动机构400包括两组驱动丝杆410,所述支撑机架220上设置有驱动螺母420,所述两组驱动丝杆410分别与驱动螺母420配合,所述两组驱动丝杆410 的螺纹延伸方向相反,驱动单元驱动两组驱动丝杆410同步转动。
驱动单元驱动两组驱动丝杆410同步转动,以连动支撑机架220上的驱动螺母420沿着驱动丝杆410同向或者反向运动,以连动患者的双脚的同向护着反向的运动,模拟患者实际的行走步态,以实施对患者的康复训练。
具体地,所述驱动单元包括设置在机架430上的驱动电机440,所述驱动电机440驱动两组驱动丝杆410同步转动。
更为具体地,所述两组驱动丝杆410的一端均设置有从动带轮411,所述驱动电机440的输出轴分别设置有第一、第二驱动带轮441、442,所述第一、第二驱动带轮441、442平行间隔布置且分别通过皮带与两组驱动丝杆410上的从动带轮411连接。
所述设备箱体500上设置有两组条状开口520,所述两组条状开口520 平行间隔布置,所述两组康复脚板100显露在条状开口520内。
为实施对患者小腿关节位置的支撑,以模拟患者下肢的屈伸动作,所述支撑机架220上延伸设置有托杆600,所述托杆600的延伸端设置有托辊610,所述托辊610水平且实施对患者小腿的支撑。
优选地,为实施对患者小腿关节的弹性支撑,所述托杆600通过铰接轴活动式设置在支撑机架220上,所述托杆600的铰接轴水平且与康复脚板100的移动方向垂直,所述托杆600的铰接轴上套设有抵靠扭簧620,所述抵靠扭簧620的两端与铰接轴及托杆600抵靠连接。
为实施对康复脚板100的同向移动,以模拟患者的小腿屈伸动作,所述机架430上设置有水平螺母431,所述水平螺母431内设置有水平动力丝杆432,所述水平动力丝杆432与康复脚板100长度方向平行布置,所述水平动力丝杆432与水平动力电机433连接。
水平动力电机433启动,使得两组康复脚板100的同向移动,以模拟患者的小腿屈伸动作,提高患者下肢康复质量。
为实施对患者脚部与康复脚板100的有效固定,所述康复脚板100的前后端均设置有捆扎绷带,所述捆扎绷带用于实施对脚面及踝关节位置的捆扎,所述捆扎绷带包括第一捆扎带710及第二捆扎带720,所述第一捆扎带710及第二捆扎带720的一端分别固定在康复脚板100的两侧,所述第一捆扎带710及第二捆扎带720的连接端设置有触发单元,所述第一捆扎带710及第二捆扎带720分离且启动触发单元,使得报警设备发出报警信号。
当患者的双脚抵靠在康复脚板100上后,第一捆扎带710及第二捆扎带720捆扎在患者的脚背位置,以实施对患者的脚步固定,当第一捆扎带 710及第二捆扎带720的连接端分离后,报警设备发出报警信号,以提示患者的脚步捆扎带松开,避免产生安全事故。
具体地,所述第一捆扎带710的一端设置有插头711,所述第二捆扎带720的一端设置有插板721,所述插头711与插板721构成插接配合。
在实施对第一捆扎带710与第二捆扎带720捆扎时,插头711与插板 721构成插接配合即可实现对患者脚背的捆扎固定,并且捆扎绷带在脚踝位置也有设置,以实施对患者脚部的有效固定。
结合图15至图17所示,在实际触发报警设备报警,所述触发单元包括设置在插板721上的第一电极片722及第二电极片723,所述第二电极片723与第一电极片722构成抵靠及分离配合,所述第二电极片723与第一电极片722分离时,所述报警设备发出报警信号。
第二电极片723与第一电极片722构成抵靠及分离配合,使得控制单元发出控制信号至报警设备,当第二电极片723与第一电极片722分离后,报警设备启动,以提示患者或者整个设备停机,避免产生安全事故,当第二电极片723与第一电极片722抵靠后,即可实施对患者双脚的有效固定。
优选地,在实施对插板721与插头711之间的插接及分离时,所述插板721整体呈现矩形管状构造,所述插板721的两侧管壁设置有卡接开口 7211,所述插头711上设置有两组插接臂7111,所述两组插接臂7111平行间隔布置,所述两组插接臂7111的延伸端分别设置有插接爪7112,所述两组插接臂7111与插板721的管口构成插接配合且插接爪7112凸伸出卡接开口7211。
为实施对第二电极片723与第一电极片722靠近或分离的驱动,所述插头711上设置有推送头7113,所述推送头7113沿着两组插接臂7111长度方向布置。
更为具体地,所述第一电极片722固定设置在插板721的管腔内,所述第二电极片723活动式设置在插板721的管腔内,所述两组插接臂7111 与插板721的管口构成插接配合时,所述推送头7113与第二电极片723抵靠,且使得第二电极片723与第一电极片722结合。
更为具体地,所述第二电极片723的两端设置有抵靠片,所述抵靠片上设置有复位簧724,所述复位簧724的两端分别与抵靠片及插板721的一端抵靠。
为确保第二电极片723与第一电极片722的可靠结合,所述第二电极片723与第一电极片722的抵靠面上设置有结合凸部7231,所述结合凸部 7231沿着第二电极片723长度方向间隔设置多个。
对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
Claims (10)
1.下肢康复机中的脚步摆动机构,其特征在于:包括用于放置患者脚掌的两组康复脚板(100),所述两组康复脚板(100)板面竖直且分别设置在脚掌支撑机构(200)上,所述脚掌支撑机构(200)用于实施对两组康复脚板(100)的支撑,所述脚掌支撑机构(200)设置在脚掌摆动机构(300)上,所述脚掌摆动机构(300)驱动两组康复脚板(100)呈现分离或者靠近的两种动作状态,所述两组康复脚板(100)之间平行间隔布置,两组康复脚板(100)的脚跟位置通过脚掌支撑机构(200)活动式设置在脚掌摆动机构(300)上。
2.根据权利要求1所述的下肢康复机中的脚步摆动机构,其特征在于:所述脚掌支撑机构(200)包括设置在康复脚板(100)脚跟位置的第一支撑滑杆(210),所述第一支撑滑杆(210)竖直滑动设置在支撑机架(220)上,所述康复脚板(100)脚尖下板面设置有第二支撑滑杆(230),所述第二支撑滑杆(230)滑动设置在弹性支撑单元上,所述弹性支撑单元用于实施对第二支撑滑杆(230)的弹性支撑。
3.根据权利要求2所述的下肢康复机中的脚步摆动机构,其特征在于:所述康复脚板(100)脚尖下板面铰接设置有连接座(231),所述第二支撑滑杆(230)呈弧杆状且一端固定在连接座(231)上。
4.根据权利要求3所述的下肢康复机中的脚步摆动机构,其特征在于:所述康复脚板(100)的脚跟位置两侧设置有转动滑杆(240),所述转动滑杆(240)水平且与康复脚板(100)的长度方向垂直,所述转动滑杆(240)的一端与座体(241)的一端构成转动连接,所述第一支撑滑杆(210)固定在座体(241)上。
5.根据权利要求4所述的下肢康复机中的脚步摆动机构,其特征在于:所述转动滑杆(240)上套设有复位扭簧(242),所述复位扭簧(242)的两端分别与座体(241)及转动滑杆(240)连接,所述第一支撑滑杆(210)上套设有支撑弹簧(211),所述支撑弹簧(211)两端分别与支撑机架(220)及座体(241)抵靠。
6.根据权利要求5所述的下肢康复机中的脚步摆动机构,其特征在于:所述弹性支撑单元包括连接座(231),所述第二支撑滑杆(230)一端滑动设置在支撑推头(232)上,所述第二支撑滑杆(230)上套设有第一推送弹簧(233),所述第一推送弹簧(233)的两端分别与连接座(231)及支撑推头(232)抵靠,所述支撑推头(232)水平移动且压缩第一推送弹簧(233)。
7.根据权利要求6所述的下肢康复机中的脚步摆动机构,其特征在于:所述支撑推头(232)一端与推料头(250)连接,所述推料头(250)沿着支撑机架(220)上滑动,所述推料头(250)与第一推料支杆(234)铰接,所述第一推料支杆(234)的另一端与第二推料支杆(235)的一端铰接,所述第二推料支杆(235)的另一端与支撑机架(220)铰接,所述第一推料支杆(234)及第二推料支杆(235)两端之前的铰接轴水平且与支撑推头(232)的移动方向垂直。
8.根据权利要求7所述的下肢康复机中的脚步摆动机构,其特征在于:所述支撑推头(232)上设置有推料滑杆(2321),所述推料头(250)与推料滑杆(2321)构成滑动配合,所述推料滑杆(2321)上套设有第二推送弹簧(2322),所述第二推送弹簧(2322)两端分别与支撑推头(232)及推料头(250)抵靠;所述支撑机架(220)上设置有水平滑杆(221),所述水平滑杆(221)与推料滑杆(2321)平行布置。
9.根据权利要求8所述的下肢康复机中的脚步摆动机构,其特征在于:所述脚掌摆动机构(300)包括设置在第一推料支杆(234)与第二推料支杆(235)的铰接轴上的摆动连杆(310),所述摆动连杆(310)与摆动动力机构连接,所述摆动动力机构驱动摆动连杆(310)呈现摆动动作。
10.根据权利要求9所述的下肢康复机中的脚步摆动机构,其特征在于:所述摆动连杆(310)的杆端设置有摆动轮(320),所述摆动轮(320)与摆动折板(330)抵靠,所述摆动折板(330)沿着康复脚板(100)的移动方向排布;所述摆动折板(330)的旁侧设置有护板(340),所述护板(340)与摆动折板(330)平行布置,所述摆动轮(320)设置在护板(340)与摆动折板(330)之间。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202120684003.7U CN215584753U (zh) | 2021-04-06 | 2021-04-06 | 一种下肢康复机中的脚步摆动机构 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202120684003.7U CN215584753U (zh) | 2021-04-06 | 2021-04-06 | 一种下肢康复机中的脚步摆动机构 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN215584753U true CN215584753U (zh) | 2022-01-21 |
Family
ID=79871456
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202120684003.7U Active CN215584753U (zh) | 2021-04-06 | 2021-04-06 | 一种下肢康复机中的脚步摆动机构 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN215584753U (zh) |
-
2021
- 2021-04-06 CN CN202120684003.7U patent/CN215584753U/zh active Active
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8177688B2 (en) | Rehabilitation and exercise machine | |
| CA2776626C (en) | Improved rehabilitation and exercise machine | |
| CA2381887A1 (en) | Method, apparatus and system for automation of body weight support training (bwst) of biped locomotion over a treadmill using a programmable stepper device (psd) operating like anexoskeleton drive system from a fixed base | |
| CN113069323A (zh) | 一种卧位下肢康复机器人 | |
| CN110613582A (zh) | 一种促通式下肢踝膝关节运动功能康复训练装置及训练方法 | |
| CN110613583A (zh) | 一种促通式偏瘫踝关节运动功能康复训练装置及训练方法 | |
| CN111317970B (zh) | 一种偏瘫患者行走康复训练装置 | |
| US4628909A (en) | Alternative health care machine | |
| CN108938325A (zh) | 下肢体康复训练机器人 | |
| CN211535460U (zh) | 一种促通式下肢踝膝关节运动功能康复训练装置 | |
| CN215584753U (zh) | 一种下肢康复机中的脚步摆动机构 | |
| CN215584749U (zh) | 一种康复设备的脚掌支撑机构 | |
| CN215584751U (zh) | 一种康复机中的脚掌驱动机构 | |
| CN215584750U (zh) | 一种卧位下肢康复机器人 | |
| CN210844086U (zh) | 一种脑卒中患者用下肢康复训练装置 | |
| CN215584752U (zh) | 一种康复设备中的脚步捆绑机构 | |
| Regnaux et al. | An accelerometry-based comparison of 2 robotic assistive devices for treadmill training of gait | |
| CN215021730U (zh) | 一种基于仿生踝关节的康复训练装置及轮椅 | |
| CN111839993A (zh) | 一种神经内科的康复训练床 | |
| KR101477571B1 (ko) | 하지재활운동 복합장치 | |
| Martins et al. | Review and classification of human gait training and rehabilitation devices | |
| CN217366443U (zh) | 一种预防下肢深静脉血栓的运动装置 | |
| CN211535459U (zh) | 一种促通式偏瘫踝关节运动功能康复训练装置 | |
| CN113081691A (zh) | 一种基于仿生踝关节的康复训练装置及轮椅 | |
| JP2006000271A (ja) | 閉鎖性運動連鎖訓練装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant |