CN211809943U - 多运动模式轮-履-腿复合式机器人 - Google Patents
多运动模式轮-履-腿复合式机器人 Download PDFInfo
- Publication number
- CN211809943U CN211809943U CN201922490199.1U CN201922490199U CN211809943U CN 211809943 U CN211809943 U CN 211809943U CN 201922490199 U CN201922490199 U CN 201922490199U CN 211809943 U CN211809943 U CN 211809943U
- Authority
- CN
- China
- Prior art keywords
- wheel
- track
- crawler
- leg
- mechanisms
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Abstract
本实用新型公开了一种多运动模式轮‑履‑腿复合式机器人,包括轮式机构、履带机构、腿式机构、机器人本体等,能够实现轮式运动、轮‑履运动和履‑腿运动的自由切换,轮式运动实现快速行驶功能,轮‑履运动实现爬楼梯、越障、爬坡功能,履‑腿运动实现直立行走功能。该机器人对地形适应能力强,可在各种复杂工况及天气情况下平稳运行,扩展了机器人应用范围及场景,具有外形尺寸小、防护等级高、结构简单等特点。
Description
技术领域
本实用新型涉及机器人技术领域,具体为一种多运动模式轮-履-腿复合式机器人。
背景技术
目前,国内外的机器人按照移动底盘结构可分为轮式、履带式、足式、复合式。轮式结构机器人的结构相对简单,具有优良的控制稳定性,可以高速稳定地运行于地面较平坦的路面地形上,其能源利用率高,但可适应的地形少,越障能力有限;履带式结构机器人着地面积较大,履带与地面的粘合力强,能在凹凸不平的崎岖地面上稳定行驶,具有较好的地面适应性和越障稳定性,但其移动速度较低;足式结构机器人具有多个关节,灵活性强,可攀越较高的障碍物,越障性能高,有良好的地形适应能力,但其结构复杂、成本高、运动时的稳定控制难以保障;复合式结构机器人能够实现多种功能,但是结构复杂、控制系统复杂、外形尺寸大、自重大、能耗高。
机器人应用范围涉及到人类生活的各个方面,需要能够在各种复杂工况及天气情况下平稳运行,现有结构形式的机器人存在功能单一、结构复杂、控制难度大能等问题,制约其使用范围及场景,无法满足使用的需求。
实用新型内容
为了解决上述技术问题,本实用新型提供一种多运动模式轮-履-腿复合式机器人,能够实现轮式运动、轮-履运动和履-腿运动的自由切换,具有快速行驶、爬楼梯、越障、爬坡、直立行走等功能。
本实用新型采用如下技术方案:
本实用新型的多运动模式轮-履-腿复合式机器人,包括机器人本体、设置在机器人本体上的四个轮式机构、与所述轮式机构配合安装的履带机构、安装在所述履带机构上的腿式机构,所述的履带机构和腿式机构均有四个,与四个轮式机构一一对应;
所述的轮式机构包括第一链轮链条和车轮;所述的多运动模式轮-履-腿复合式机器人还包括两个车轮驱动电机和两个车轮驱动电机减速器,位于机器人本体同一侧的两个轮式机构由同一个车轮驱动电机驱动;车轮驱动电机与车轮驱动电机减速器连接,车轮驱动电机减速器的出轴与同一侧两个轮式机构的第一链轮链条相连,第一链轮链条带动各自轮式机构的车轮实现转动;
所述的履带机构包括主动履带轮、从动履带轮、履带摆臂、履带摆臂驱动电机、履带摆臂蜗轮蜗杆减速器、履带机构旋转轴和履带;履带摆臂驱动电机与履带摆臂蜗轮蜗杆减速器连接,履带摆臂蜗轮蜗杆减速器的出轴与履带机构旋转轴连接,履带机构旋转轴与履带摆臂一端连接,带动履带摆臂摆动,履带摆臂另一端固定有所述从动履带轮;主动履带轮与轮式机构的车轮同步转动,履带套设在主动履带轮和从动履带轮上;其中履带机构旋转轴、车轮的转动轴线、主动履带轮的转动轴线同轴;
所述的腿式机构包括腿式机构驱动电机、第二链轮链条、小腿,所述的小腿与摆臂铰接,铰接轴与从动履带轮的转轴同轴;腿式机构驱动电机安装在履带机构的摆臂上,腿式机构驱动电机通过第二链轮链条将动力传递给小腿,实现小腿绕铰接轴的旋转。
作为本实用新型的优选方案,机器人本体内安装有限位开关,用来限制履带机构的摆动角度。
作为本实用新型的优选方案,车轮与主动履带轮相连接,实现车轮带动履带一同运动。
本实用新型具有以下有益效果:
该机器人具有良好的地形适应能力,可在各种复杂工况及天气情况下平稳运行,能够实现轮式运动、轮-履运动和履-腿运动的自由切换,具有快速行驶、爬楼梯、越障、爬坡、直立行走等功能,外形尺寸小、防护等级高、结构简单。
附图说明
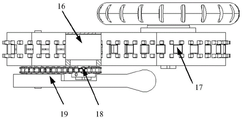
图1为本实用新型提供的多运动模式轮-履-腿复合式机器人主视图;
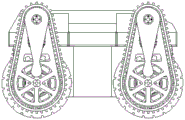
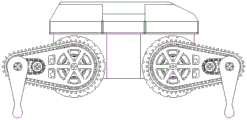
图2为本实用新型提供的多运动模式轮-履-腿复合式机器人俯视图;
图3中轮-履-腿结构的局部剖视图;
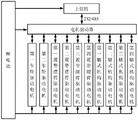
图4为控制系统原理框图;
图5车轮式运动视图;
图6轮-履运动视图;
图7履-腿运动视图。
具体实施方式
以下结合附图和具体实施方式对本实用新型的技术方案进行详细描述。
如图1~3所示,本实用新型的多运动模式轮-履-腿复合式机器人,包括机器人本体1、设置在机器人本体1上的四个轮式机构2、与所述轮式机构2配合安装的履带机构3、安装在所述履带机构3上的腿式机构4,多运动模式轮-履-腿复合式机器人能够实现轮式运动、轮-履运动和履-腿运动的自由切换,轮式运动实现快速行驶功能,轮-履运动实现爬楼梯、越障、爬坡功能,履-腿运动实现直立行走功能。四个轮式机构2两两安装在机器人本体1的一侧,且两侧的轮式机构2相互对称;同侧的轮式机构2间保持一定的距离,使机器人的重心位于四个轮式机构2之间,最好是位于四个轮式机构2构成的四边形的中心。
如图2所示,在本实用新型的一个具体实施例中,一个轮式机构2包括一个第一链轮链条11和一个车轮9;所述的多运动模式轮-履-腿复合式机器人还包括两个车轮驱动电机12和两个车轮驱动电机减速器13,位于机器人本体1同一侧的两个轮式机构2由同一个车轮驱动电机12驱动;车轮驱动电机12与车轮驱动电机减速器13连接,车轮驱动电机减速器13的出轴与同一侧两个轮式机构2的第一链轮链条11、14相连,第一链轮链条11、14带动各自轮式机构2的车轮9、15实现转动;
如图2所示,在本实用新型的一个具体实施例中,所述的履带机构3包括主动履带轮17、从动履带轮、履带摆臂、履带摆臂驱动电机7、履带摆臂蜗轮蜗杆减速器6、履带机构旋转轴8和履带10;履带摆臂驱动电机7与履带摆臂蜗轮蜗杆减速器6连接,履带摆臂蜗轮蜗杆减速器6的出轴与履带机构旋转轴8连接,履带机构旋转轴8与履带摆臂一端连接,带动履带摆臂摆动,履带摆臂另一端固定有所述从动履带轮;主动履带轮与轮式机构2的车轮9同步转动,履带10套设在主动履带轮和从动履带轮上;其中履带机构旋转轴8、车轮9的转动轴线、主动履带轮的转动轴线同轴;
如图3所示,在本实用新型的一个具体实施例中,所述的腿式机构4包括腿式机构驱动电机16、第二链轮链条18、小腿19,所述的小腿19与摆臂铰接,铰接轴与从动履带轮的转轴同轴;腿式机构驱动电机16安装在履带机构3的摆臂上,腿式机构驱动电机16通过第二链轮链条18将动力传递给小腿19,实现小腿19绕铰接轴的旋转。在本实用新型的一个具体实施例中,所述的车轮9的转动和主动履带轮的转动轴为同一根轴,该轴中空,内部中空处套设有履带机构旋转轴8。
如图4所示为本实用新型的控制系统原理框图,锂电池用来给电机、电机驱动器和上位机供电,通过上位机来控制机器人系统的各种运动工作,具体为上位机接收安装于机器人四周传感器的信息,将其转化为电机控制信号传递给电机驱动器来控制电机的运转,从而控制车轮、履带机构、腿机构的运动,最终实现机器人快速行驶、爬楼梯、越障、爬坡、直立行走功能。
工作模式一:轮式运动
如图5所示,将履带机构和腿机构收起,只有车轮着地,位于机器人本体两侧的车轮驱动电机12(图4中第一车轮驱动电机和第二车轮驱动电机)带动相应的车轮运动,实现机器人的快速行驶功能,此时机器人等同于一台汽车。
工作模式二:轮-履运动
如图6所示,将腿机构收起,履带机构着地,四个履带机构3的履带摆臂驱动电机7(图4中第一、第二、第三和第四履带摆臂驱动电机)带动相应的履带机构进行运动,车轮旋转带动相应的履带进行运动,并通过车轮与履带机构之间的配合使用,实现机器人的爬楼梯、越障及爬坡功能。
工作模式三:履-腿运动
如图7所示,履带机构的摆臂相当于“大腿”,与腿式机构的小腿间铰接连接。在履-腿运动模式中,腿式机构着地(即小腿19的非铰接端着地),四个腿式机构4的腿式机构驱动电机16(图4中第一、第二、第三和第四腿式机构驱动电机)带动相应的腿机构进行运动,通过履带机构和腿机构之间的配合使用来模拟动物行走的步态,从而实现机器人的行走功能。
本实例中传动机构的传动方式不只局限于使用链轮传动,也可使用齿轮、同步齿形带等传动方式,都属于本实用新型的保护范围内。
Claims (3)
1.一种多运动模式轮-履-腿复合式机器人,其特征在于包括机器人本体(1)、设置在机器人本体(1)上的四个轮式机构(2)、与所述轮式机构(2)配合安装的履带机构(3)、安装在所述履带机构(3)上的腿式机构(4),所述的履带机构(3)和腿式机构(4)均有四个,与四个轮式机构(2)一一对应;
所述的轮式机构(2)包括第一链轮链条(11)和车轮(9);所述的多运动模式轮-履-腿复合式机器人还包括两个车轮驱动电机(12)和两个车轮驱动电机减速器(13),位于机器人本体(1)同一侧的两个轮式机构(2)由同一个车轮驱动电机(12)驱动;车轮驱动电机(12)与车轮驱动电机减速器(13)连接,
车轮驱动电机减速器(13)的出轴与同一侧两个轮式机构(2)的第一链轮链条(11)相连,第一链轮链条(11)带动各自轮式机构(2)的车轮(9)实现转动;
所述的履带机构(3)包括主动履带轮、从动履带轮、履带摆臂、履带摆臂驱动电机(7)、履带摆臂蜗轮蜗杆减速器(6)、履带机构旋转轴(8)和履带(10);履带摆臂驱动电机(7)与履带摆臂蜗轮蜗杆减速器(6)连接,履带摆臂蜗轮蜗杆减速器(6)的出轴与履带机构旋转轴(8)连接,履带机构旋转轴(8)与履带摆臂一端连接,带动履带摆臂摆动,履带摆臂另一端固定有所述从动履带轮;主动履带轮与轮式机构(2)的车轮(9)同步转动,履带(10)套设在主动履带轮和从动履带轮上;其中履带机构旋转轴(8)、车轮(9)的转动轴线、主动履带轮的转动轴线同轴;
所述的腿式机构(4)包括腿式机构驱动电机(16)、第二链轮链条(18)、小腿(19),所述的小腿(19)与摆臂铰接,铰接轴与从动履带轮的转轴同轴;腿式机构驱动电机(16)安装在履带机构(3)的摆臂上,腿式机构驱动电机(16)通过第二链轮链条(18)将动力传递给小腿(19),实现小腿(19)绕铰接轴的旋转。
2.如权利要求1所述一种多运动模式轮-履-腿复合式机器人,其特征在于:机器人本体(1)内安装有限位开关(5),用来限制履带机构(3)的摆动角度。
3.如权利要求1所述一种多运动模式轮-履-腿复合式机器人,其特征在于:车轮(9)与主动履带轮(17)相连接,实现车轮(9)带动履带(10)一同运动。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201922490199.1U CN211809943U (zh) | 2019-12-31 | 2019-12-31 | 多运动模式轮-履-腿复合式机器人 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201922490199.1U CN211809943U (zh) | 2019-12-31 | 2019-12-31 | 多运动模式轮-履-腿复合式机器人 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN211809943U true CN211809943U (zh) | 2020-10-30 |
Family
ID=73041152
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201922490199.1U Active CN211809943U (zh) | 2019-12-31 | 2019-12-31 | 多运动模式轮-履-腿复合式机器人 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN211809943U (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111038612A (zh) * | 2019-12-31 | 2020-04-21 | 浙江大学 | 一种多运动模式轮-履-腿复合式机器人 |
-
2019
- 2019-12-31 CN CN201922490199.1U patent/CN211809943U/zh active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111038612A (zh) * | 2019-12-31 | 2020-04-21 | 浙江大学 | 一种多运动模式轮-履-腿复合式机器人 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111038612A (zh) | 一种多运动模式轮-履-腿复合式机器人 | |
| CN107554637B (zh) | 一种六足越障机器人 | |
| CN101219683B (zh) | 轮足两用式移动机器人 | |
| CN105383586B (zh) | 轮履腿复合式移动机器人 | |
| CN104773042B (zh) | 一种具有可变形结构的水陆两栖机器人 | |
| CN110217299A (zh) | 多功能通用型机器人底盘 | |
| CN201760877U (zh) | 一种可变形适应全地形的机器人行走机构 | |
| CN105313997A (zh) | 双模式移动机器人 | |
| CN201231791Y (zh) | 多关节型履带式移动机器人 | |
| CN104527835B (zh) | 一种轮腿模式可切换机器人 | |
| CN204472949U (zh) | 新型轮腿模式可切换机器人 | |
| CN206900502U (zh) | 轮履复合式全地形机器人 | |
| CN112373594A (zh) | 一种轮腿混合驱动式矿用变胞机器人 | |
| CN203806022U (zh) | 能够适应核电站等复杂非结构化环境的轮履复合型机器人 | |
| CN211809943U (zh) | 多运动模式轮-履-腿复合式机器人 | |
| CN105539628A (zh) | 一种轮腿式蟑螂形仿生机器人 | |
| CN108860340A (zh) | 轮履复合式全向移动机器人 | |
| CN210592195U (zh) | 一种多功能通用型机器人底盘 | |
| CN204915892U (zh) | 底盘升降型双足轮式运动机构及机器人 | |
| CN202006842U (zh) | 一种轮腿机器人 | |
| CN201566714U (zh) | 轮履式越障机构 | |
| CN207617846U (zh) | 一种轮式多地面适应性车辆 | |
| CN114872807A (zh) | 一种轮-履-腿复合式移动机器人 | |
| CN111959632A (zh) | 一种便携式地面移动平台 | |
| CN114074723A (zh) | 一种基于麦克纳姆轮的轮履式移动机器人 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant |