Device for measuring speed and direction of ocean current
Technical Field
The utility model belongs to the technical field of the ocean monitoring instrument, especially, relate to a measure device of ocean current speed and direction.
Background
China is a world with developed mariculture, and both the culture area and the total yield are the first in the world. The real-time monitoring of the temperature and salinity of the seawater can bring huge economic benefits to the marine aquaculture industry. The current meter is a commonly used marine environment monitoring tool, the current is one of basic marine data, and is an indispensable important parameter in marine monitoring investigation and research, and the important content of marine survey is the real-time monitoring and measurement of marine flow field, therefore, the device of measuring current speed and direction is the essential equipment of commonly using in marine monitoring investigation work.
Although there are many current meters made according to the acoustic doppler effect principle and the acoustic time difference principle, the mechanical rotor type current measuring device still occupies a place depending on the characteristics of low cost, high reliability, firm structure, small volume, convenient carrying and the like.
In addition, the invention discloses a novel multifunctional current meter with the Chinese patent publication number of CN203964956U, which comprises a terminal host, an above-water cable, a buoy, an underwater cable and an underwater detector, wherein the terminal host is provided with a display screen, a voice broadcast device and function keys, the terminal host is connected with the buoy through the above-water cable and the underwater cable, the underwater cable is connected with the underwater detector, and the underwater detector is provided with a broadband light source, an optical fiber long-period grating, a splitter, an optical fiber Bragg grating, a uniformly-corroded Bragg grating, an ultrasonic detector, a matched optical fiber Bragg grating and a micro-processing system.
However, the existing device for measuring the speed and the direction of the ocean current also has the problems of inconvenient carrying and control, overlarge power consumption and lower intelligent degree.
Therefore, it is necessary to develop a device for measuring the speed and direction of ocean current.
SUMMERY OF THE UTILITY MODEL
In order to solve the technical problem, the utility model provides a measure device of ocean current speed and direction to solve the current device of measuring ocean current speed and direction and carry and control inconveniently, the problem that the consumption is too big and intelligent degree is lower.
A device for measuring the speed and direction of ocean current comprises an underwater detection structure, a data transmission watertight bearing cable and a handheld overwater display terminal structure, wherein the underwater detection structure is connected with the handheld overwater display terminal structure through the data transmission watertight bearing cable; a sealing rubber pad is arranged at the intersection of the data transmission watertight bearing cable, the underwater detection structure and the handheld water display terminal structure; the underwater detection structure comprises a machine body, a cable fixing frame, a reserved hanging ring, an inclined stay bar, a protective cover, a detection rotor and a flow guide tail rudder, wherein the cable fixing frame is welded at the middle position of the upper part of the machine body; the reserved hoisting ring is welded at the middle position of the lower part of the machine body; one end of the inclined strut is connected to the left side of the outer surface of the machine body through a screw, and the other end of the inclined strut is connected to the outer side of the protective cover through a screw; the detection rotor is arranged on the left side in the machine body; the flow guide tail vane is connected to the right side of the machine body through a bolt.
Preferably, a circuit main board, a V-F converter, a compass potentiometer type sensor, an underwater host, a pressure sensor and a temperature sensor are arranged inside the machine body, and the circuit main board is connected to the middle position inside the machine body through a screw; the V-F converter is welded in the middle of the circuit main board; the compass potentiometer type sensor is welded at the left position of the circuit main board; the underwater host is inserted at the right side of the circuit main board; and the pressure sensor and the temperature sensor are respectively welded at the upper part and the lower part of the left side of the circuit main board.
Preferably, the diversion tail rudder consists of a side tail rudder and a bottom tail rudder; the side tail rudders are arranged in a production line; the side tail rudder and the side tail rudder are respectively connected to the upper side of the bottom tail rudder through screws.
Preferably, the handheld water display terminal structure comprises a handheld shell, a display screen, a control button, a single chip microcomputer circuit board, a storage circuit board and a storage battery, wherein the display screen is embedded in the middle of the upper part of the front surface of the handheld shell; the control button is embedded at the left lower side of the front surface of the handheld shell; the single chip microcomputer circuit board is connected to the middle position of the right side inside the handheld shell through a screw; the storage circuit board is connected to the right lower side of the interior of the handheld shell through a screw; the storage battery is embedded in the lower side position inside the handheld shell.
Preferably, two side tail rudders are arranged; the bottom tail rudder is rectangular; the bottom tail rudder is provided with one.
Preferably, the machine body is a stainless steel shell with a double-sealing structure.
Preferably, the single chip microcomputer circuit board is a low-power consumption single chip microcomputer circuit board.
Preferably, a memory chip is arranged in the memory circuit board.
Preferably, the total weight of the underwater detection structure is set to be eight kilograms to ten kilograms; the overall length of the underwater detection structure is five hundred millimeters to six hundred millimeters.
Preferably, the storage battery is a lithium ion battery.
Preferably, the software program module of the handheld water display terminal structure comprises: the main program module, the data transmission and storage module, the data processing and display module; the main program module, the data transmission and storage module and the data processing and display module are in communication connection with each other.
Preferably, the main program module is the whole software center and can be responsible for organizing and calling each function module according to different events; coordinating data transmission and sharing among the modules; and responding and prompting the error operation.
Preferably, the data transmission and storage module is mainly responsible for communicating with the underwater detection structure, sending a command to the underwater detection structure, judging the working state of the underwater detection structure according to the returned information, and making a corresponding response; meanwhile, the module is also responsible for storing the received data into a storage chip, and can select the later-period extraction data to finish the self-contained working mode.
Preferably, the data processing and displaying module can correspondingly process information data such as the speed and direction of the ocean current collected by the underwater detection structure, and the information data is converted into corresponding data to be directly displayed on the display screen, so that the direct-reading working mode is completed.
Compared with the prior art, the beneficial effects of the utility model are that:
1. the device is designed to work from aspects of hardware design, device working mode, software optimization and the like, is suitable for real-time response of flow rate signals and rapid data processing requirements, solves the problems of power consumption and intelligent working, can select direct reading in the working mode and can also select a capacity mode, so that the instrument has functions of automatic sampling storage, display and the like, and the intelligent requirement is realized;
2. the device can be used on any type of ship or platform and can be used for measuring the speed and the direction of water flow at different depths in oceans, estuaries, rivers, lakes, reservoirs and estuaries;
3. the cable fixing frame plays a role in restraining and fixing the data transmission watertight bearing cable, and the looseness of the connection part of the data transmission watertight bearing cable and the machine body in the pulling process is avoided; the setting of reserving rings is favorable to connecting outside traction platform, increases the convenience of operation.
Drawings
Fig. 1 is a schematic structural diagram of the present invention;
fig. 2 is a schematic structural view of the underwater exploration structure of the present invention;
fig. 3 is a schematic view of the internal structure of the fuselage of the present invention;
fig. 4 is a schematic top view of the flow guiding tail vane of the present invention;
fig. 5 is a schematic structural diagram of the structure of the handheld water display terminal of the present invention;
FIG. 6 is a frame diagram of the working principle of the present invention;
fig. 7 is a frame diagram of a software program of the structure of the handheld water display terminal of the present invention.
In the figure:
1. an underwater detection structure; 11. a body; 111. a circuit main board; 112. a V-F converter; 113. a compass potentiometer type sensor; 114. an underwater host; 115. a pressure sensor; 116. a temperature sensor; 12. a cable fixing frame; 13. reserving a hanging ring; 14. a diagonal brace; 15. a protective cover; 16. detecting a rotor; 17. a diversion tail vane; 171. a side tail rudder; 172. a bottom tail rudder; 2. a data transmission watertight load-bearing cable; 3. a hand-held waterborne display terminal structure; 31. a hand-held housing; 32. a display screen; 33. operating a key; 34. a single chip circuit board; 35. a memory circuit board; 36. and (4) a storage battery.
Detailed Description
The invention is further described below with reference to the accompanying drawings:
example (b):
as shown in fig. 1 to 2, the utility model provides a device for measuring the speed and direction of ocean current, which comprises an underwater detection structure 1, a data transmission watertight bearing cable 2 and a hand-held type on-water display terminal structure 3, wherein the underwater detection structure 1 is connected with the hand-held type on-water display terminal structure 3 through the data transmission watertight bearing cable 2; a sealing rubber pad is arranged at the intersection of the data transmission watertight bearing cable 2, the underwater detection structure 1 and the handheld water display terminal structure 3; the underwater detection structure 1 comprises a machine body 11, a cable fixing frame 12, a reserved hanging ring 13, an inclined stay bar 14, a protective cover 15, a detection rotor 16 and a diversion tail rudder 17, wherein the cable fixing frame 12 is welded in the middle of the upper part of the machine body 11; the reserved hanging ring 13 is welded in the middle of the lower part of the machine body 11; one end of the inclined strut 14 is connected to the left position of the outer surface of the machine body 11 through a screw, and the other end of the inclined strut is connected to the outer side of the protective cover 15 through a screw; the detection rotor 16 is arranged at the left side of the interior of the machine body 11; the diversion tail vane 17 is connected to the right side of the fuselage 11 through bolts.
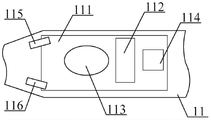
As shown in fig. 3, in the above embodiment, specifically, a circuit board 111, a V-F converter 112, a compass potentiometer type sensor 113, an underwater host 114, a pressure sensor 115 and a temperature sensor 116 are arranged inside the fuselage 11, and the circuit board 111 is screwed to an inner middle position of the fuselage 11; the V-F converter 112 is welded in the middle of the circuit main board 111; the compass potentiometer type sensor 113 is welded at the left position of the circuit main board 111; the underwater host 114 is inserted at the right side of the circuit main board 111; the pressure sensor 115 and the temperature sensor 116 are respectively welded at the upper and lower positions on the left side of the circuit main board 111.
As shown in fig. 4, in the above embodiment, specifically, the diversion tail rudder 17 is composed of a side tail rudder 171 and a bottom tail rudder 172; the side tail rudder 171 is arranged in a production line; the side tail rudder 171 and the side tail rudder 171 are respectively screwed on the upper side of the bottom tail rudder 172.
As shown in fig. 5, in the above embodiment, specifically, the handheld marine display terminal structure 3 includes a handheld housing 31, a display screen 32, a control button 33, a single-chip microcomputer circuit board 34, a storage circuit board 35 and a storage battery 36, where the display screen 32 is embedded in the middle of the upper portion of the front surface of the handheld housing 31; the control key 33 is embedded at the left lower side of the front surface of the handheld shell 31; the single chip microcomputer circuit board 34 is in screw connection with the middle position of the right side inside the handheld shell 31; the storage circuit board 35 is screwed on the right lower side of the interior of the handheld shell 31; the storage battery 36 is embedded in the inner lower position of the hand-held shell 31.
As shown in fig. 6, in the above embodiment, specifically, the software program modules of the handheld marine display terminal structure 3 include: the main program module, the data transmission and storage module, the data processing and display module; the main program module, the data transmission and storage module and the data processing and display module are in communication connection with each other.
The display terminal can adopt a terminal display purchased in the market, such as a state recorder produced by Yiyang photoelectricity (Shenzhen) Limited company, a single chip microcomputer display terminal PVA050-256 produced by Hangzhou Cheng technology Limited company or a single chip microcomputer dot digital liquid crystal display PVD 060-256.
The display terminal can be self-made according to the structure, wherein the handheld shell 31, the display screen 32, the control keys 33, the single chip microcomputer circuit board 34, the storage circuit board 35 and the storage battery 36 are all common products in the market. The software program modules in the display terminal structure adopt the conventional control programs and hardware in the field, such as a common intelligent VGA control board.
In the above embodiment, specifically, the main program module is the whole software hub, and can be responsible for organizing and calling each function module according to different events; coordinating data transmission and sharing among the modules; responding and prompting the error operation; the data transmission and storage module is mainly responsible for communicating with the underwater detection structure 1, sending commands to the underwater detection structure, judging the working state of the underwater detection structure according to returned information and making corresponding responses; meanwhile, the module is also responsible for storing the received data into a storage chip, and can select the later extraction data to finish the self-contained working mode; the data processing and display module can correspondingly process the information data such as the speed, the direction and the like of the ocean current collected by the underwater detection structure 1, convert the information data into corresponding data and directly display the corresponding data on the display screen 32, and complete the direct-reading working mode
Principle of operation
The rotor of the underwater detection structure 1 is a detection rotor 16, under the impact of water flow, the rotating speed of the propeller is in direct proportion to the flow velocity, the rotating speed is magnetically coupled to make and break a reed pipe in a flow velocity sensor, the reed pipe is changed into flow velocity pulses, the flow velocity pulses are sent to an overwater host through a cable, and the flow velocity measured value is obtained through counting and linear processing; the diversion tail vane 17 of the underwater detection structure 1 is used for sensing the flow direction, so that the shape of the machine body 11 in water is stabilized in the direction consistent with the water flow; a compass potentiometer type sensor 113 is used for flow direction; the machine body 11 and the flow guide tail vane 17 are driven by water flow, the compass is driven by geomagnetism, the measured value of the flow direction is an included angle between the water flow and the geomagnetism, and the output of a potentiometer is in direct proportion to the magnetic flow direction; the signal is converted into frequency modulation signal by the V-F converter 112, and is transmitted to the host computer of the singlechip circuit board 34 through the cable, and the flow direction measuring value is obtained through counting and linear processing.
When the utility model is used, a user controls the underwater detection structure 1 to work through the handheld water display terminal structure 3, sends a command to the underwater detection structure 1 through a serial port and a high-strength communication cable, observes the working state of the control device through the display screen 32, and can store the acquired data in the storage chip of the storage circuit board 35; or the observation data of the underwater detection structure 1 is exported, and the ocean current data is further analyzed and processed in the later period; the device is developed from aspects of hardware design, device working mode, software optimization and the like, adapts to the real-time response of flow rate signals and the requirement of rapid data processing, solves the problems of power consumption and intelligent working, can select direct reading in the working mode and can also select a capacity mode, so that the instrument has the functions of automatic sampling storage, display and the like, and the intelligent requirement is realized; the device selects the singlechip circuit board 34 as a singlechip chip with low power consumption to build a host control management platform; in a non-data acquisition time period, the CPU closes each data acquisition module, and is set to be in a low power consumption mode; in the speed measurement state, the V-F converter 112 does not supply power and does not work; optimizing the workflow of tasks such as flow rate, flow direction measurement, data storage and the like by software; in addition, the storage battery 36 is powered by a large-capacity lithium ion battery to improve the operating time of the current meter and reduce the size of the device.
Finally, it should be noted that: although the present invention has been described in detail with reference to the foregoing embodiments, it will be apparent to those skilled in the art that changes may be made in the embodiments and/or equivalents thereof without departing from the spirit and scope of the invention. Any modification, equivalent replacement, or improvement made within the spirit and principle of the present invention should be included in the protection scope of the present invention.