CN210665280U - 滑坡监测实验装置 - Google Patents
滑坡监测实验装置 Download PDFInfo
- Publication number
- CN210665280U CN210665280U CN201920639014.6U CN201920639014U CN210665280U CN 210665280 U CN210665280 U CN 210665280U CN 201920639014 U CN201920639014 U CN 201920639014U CN 210665280 U CN210665280 U CN 210665280U
- Authority
- CN
- China
- Prior art keywords
- landslide
- sliding body
- target sliding
- box body
- tubular member
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Landscapes
- Testing Or Calibration Of Command Recording Devices (AREA)
Abstract
本实用新型公开一种滑坡监测实验装置,包括:箱体、升降机构、推进机构、压力传感器、位移传感器、第一声发射传感器、用于插入到目标滑体中的第一管状构件。该装置构造简单,操作简便,整体稳定性好,箱体与地面的倾斜角可调以实现实验工况的灵活设计,力学加载系统可以模拟推移式滑坡的变形演化过程。此外,启动降雨系统可以模拟降雨型滑坡的灾变过程。另外,也可以同时启用力学加载系统和降雨系统,进行推移式滑坡和降雨型滑坡的耦合致灾实验,后续可以研究滑动速度、速度加载模式、降雨强度、降雨时间、斜坡倾角等各种实验条件及其不同组合对滑坡发展过程的影响,通过多种传感器输出的实验数据,探究耦合致灾机理。
Description
技术领域
本实用新型涉及监测技术领域,尤其涉及一种滑坡监测实验装置。
背景技术
滑坡是频繁发生的自然灾害之一,分布广泛,危害巨大,每年都在我国造成严重的人员伤亡和经济损失。滑坡监测是避免伤亡和损失的有力手段,识别、分析危险情况后,及时发出预警,通知民众疏散,保护重大基础设施。目前,比较常见的滑坡监测技术有:大地测量方法、岩土技术方法、地球物理方法、遥感监测等。然而,现有的滑坡监测技术,只能获取到大地表面变形,而且比较容易受到气象条件、植被覆盖等因素的影响,数据处理难度较大,成本往往也比较高。因此,如何更好地为滑坡现场的监测预警提供支撑成为亟待解决的技术问题。
实用新型内容
本实用新型的目的旨在至少在一定程度上解决上述的技术问题之一。
为此,本实用新型的第一目的在于提出一种滑坡监测实验装置,该装置构造简单,操作简便,整体稳定性好,箱体与地面的倾斜角可调以实现实验工况的灵活设计,力学加载系统可以模拟推移式滑坡的变形演化过程。此外,启动降雨系统可以模拟降雨型滑坡的灾变过程。另外,也可以同时启用力学加载系统和降雨系统,进行推移式滑坡和降雨型滑坡的耦合致灾实验,后续可以研究滑动速度、速度加载模式、降雨强度、降雨时间、斜坡倾角等各种实验条件及其不同组合对滑坡发展过程的影响,通过多种传感器输出的实验数据,探究耦合致灾机理。在推移和降雨的双重作用下,研究声学-力学-运动学-水文参量之间的关系,结合滑坡体的实时变形破坏状态,确定关键监测参数和预警阈值。
为了实现上述目的,本实用新型第一方面实施例的滑坡监测实验装置,包括:
箱体、升降机构、推进机构、压力传感器、位移传感器、第一声发射传感器、用于插入到目标滑体中的第一管状构件;
其中,所述箱体包括底板,所述底板用于堆积土体以形成所述预设形状的目标滑体;所述升降机构设置在靠近所述箱体的前端处,所述升降机构的上端与所述底板下方铰接,所述升降机构用于调整所述箱体与地面的倾斜角度;
所述推进机构设置在靠近所述箱体的前端处且与所述箱体间隔预设距离,所述推进机构用于对所述目标滑体施加平行于箱体底面的推力;
所述压力传感器设置在所述推进机构的推进端,用于检测所述推进机构施加给所述目标滑体的推力;
所述位移传感器设置在所述推进机构上,用于检测所述推进机构推动所述目标滑体时产生的位移;
所述第一声发射传感器设置在所述第一管状构件上远离所述目标滑体的一端,用于检测所述目标滑体在滑坡过程中的第一声发射信号。
进一步地,所述滑坡监测实验装置还包括:第二声发射传感器、用于插入到目标滑体中的第二管状构件;
所述第一管状构件和所述第二管状构件的材质不同,所述第一管状构件和所述第二管状构件的规格相同;
所述第二声发射传感器设置在所述第二管状构件上远离所述目标滑体的一端,用于检测所述目标滑体在滑坡过程中的第二声发射信号。
进一步地,所述滑坡监测实验装置还包括:用于插入到目标滑体中的测斜管;
所述第一管状构件和/或所述第二管状构件在所述测斜管中。
进一步地,所述滑坡监测实验装置还包括:喷洒机构、多个水分传感器;
所述喷洒机构设置在所述箱体的上方,所述喷洒机构用于向所述目标滑体喷水;
所述多个水分传感器分别设置在所述目标滑体中不同位置,所述多个水分传感器分别用于检测所述目标滑体渗水后的不同位置处的水分情况。
进一步地,所述水分传感器包括以下传感器中的一种或多种:孔隙水压力传感器、含水量传感器、吸力传感器。
进一步地,所述推进机构包括驱动组件和板状结构;
所述驱动组件用于驱动所述板状结构与所述目标滑体贴合,并对所述目标滑体施加平行于箱体底面的推力。
进一步地,所述驱动组件为千斤顶。
进一步地,所述升降机构为两个,两个所述升降机构分别设置在所述箱体的左右两侧。
进一步地,所述升降机构为丝杆升降机。
进一步地,所述箱体还包括设置在所述底板上的立体框架,所述立体框架的左右两侧分别设置有透明件。
本实施例提供的滑坡监测实验装置,包括:箱体、升降机构、推进机构、压力传感器、位移传感器、第一声发射传感器、用于插入到目标滑体中的第一管状构件。其中,所述箱体包括底板,所述底板用于堆积土体以形成所述预设形状的目标滑体;所述升降机构设置在靠近所述箱体的前端处,所述升降机构的上端与所述底板下方铰接,所述升降机构用于调整所述箱体与地面的倾斜角度;所述推进机构设置在靠近所述箱体的前端处且与所述箱体间隔预设距离,所述推进机构用于对所述目标滑体施加平行于箱体底面的推力;所述压力传感器设置在所述推进机构的推进端,用于检测所述推进机构施加给所述目标滑体的推力;所述位移传感器设置在所述推进机构上,用于检测所述推进机构推动所述目标滑体时产生的位移;所述第一声发射传感器设置在所述第一管状构件上远离所述目标滑体的一端,用于检测所述目标滑体在滑坡过程中的第一声发射信号。该装置构造简单,操作简便,整体稳定性好,箱体与地面的倾斜角可调以实现实验工况的灵活设计,力学加载系统可以模拟推移式滑坡的变形演化过程。此外,启动降雨系统可以模拟降雨型滑坡的灾变过程。另外,也可以同时启用力学加载系统和降雨系统,进行推移式滑坡和降雨型滑坡的耦合致灾实验,后续可以研究滑动速度、速度加载模式、降雨强度、降雨时间、斜坡倾角等各种实验条件及其不同组合对滑坡发展过程的影响,通过多种传感器输出的实验数据,探究耦合致灾机理。在推移和降雨的双重作用下,研究声学参数-力学参数-运动学参数-水文参数之间的关系,结合滑坡体的实时变形破坏状态,确定关键监测参数和预警阈值。
本实用新型附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
附图说明
本实用新型上述的和/或附加的方面和优点从下面结合附图对实施例的描述中将变得明显和容易理解,其中,
图1为根据本实用新型一个实施例的滑坡监测实验装置的结构示意图;
图2为实验加载过程中推力随时间变化曲线、位移随时间变化曲线;
图3为实验过程中的振铃计数随时间变化曲线;
图4为实验过程中的声发射信号的能量随时间变化曲线;
图5为振铃计数和滑动速度的关系图;
图6为推力和滑动加速度的关系图;
图7为位移、振铃计数积分、能量积分的关系图;
图8为位移、振铃计数的关系图。
附图标记:
箱体:1;底板:2;升降机构:3;支撑部:4;推进机构:5;粗钢板:6;斜撑:7;第一管状构件:8;第二管状构件:9;测斜管:10;压力传感器:11;位移传感器:12;第一声发射传感器:13;第二声发射传感器:14;孔隙水压力传感器:15;含水量传感器:16;吸力传感器:17;喷洒机构:18;目标滑体:19;地面:20。
具体实施方式
下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本实用新型,而不能理解为对本实用新型的限制。
下面参考附图描述本实用新型实施例的滑坡监测实验装置。
图1为根据本实用新型一个实施例的滑坡监测实验装置的结构示意图。
如图1所示,本实施例提供的滑坡监测实验装置,包括:箱体1、升降机构3、推进机构5、压力传感器11、位移传感器12、第一声发射传感器13、用于插入到目标滑体中的第一管状构件7。
其中,所述箱体1包括底板2,所述底板2用于堆积土体以形成所述预设形状的目标滑体。
所述升降机构3设置在靠近所述箱体的前端处,所述升降机构3的上端与所述底板2 下方铰接,所述升降机构3用于调整所述箱体1与地面20的倾斜角度;
所述推进机构5设置在靠近所述箱体1的前端处且与所述箱体1间隔预设距离,所述推进机构5用于对所述目标滑体19施加平行于箱体底面的推力;
所述压力传感器11设置在所述推进机构5的推进端,用于检测所述推进机构5施加给所述目标滑体19的推力;
所述位移传感器设置在所述推进机构5上,用于检测所述推进机构5推动所述目标滑体19时产生的位移;
所述第一声发射传感器13设置在所述第一管状构件8上远离所述目标滑体19的一端,用于检测所述目标滑体19在滑坡过程中的第一声发射信号。
本实施例中,滑坡监测实验装置的箱体1的结构形式具体不限,由于在做滑坡实验时,需要在箱体1的底板2上堆积土体以形成做滑坡实验用的目标滑体19。箱体1可以采用钢结构,强度高,确保实验过程的安全性。
可选地,箱体1包括底板2和设置在底板2上的立体框架组成。在制作箱体1时,选取符合需求的钢板作为底板2,在该底板2的四角焊接四根钢柱以形成设置底板2上的立体框架,进而制作出长4米、宽1.5米、高0.4米的矩形箱体。
为了便于观察实验过程,可在立体框架的左右两侧分别设置有透明件,透明件例如为钢化玻璃。钢化玻璃可以采用粘接的方式安装到立体框架的左右两侧,但并不以此为限。
进一步地,为了便于箱体1固定到地面20上,滑坡监测实验装置还包括支撑部4,支撑部4设置在靠近所述箱体1的后端处,所述支撑部4的上端与所述底板2下方铰接。可选地,支撑部4为铰支座。
可选地,为了保证箱体1的平衡性,所述支撑部4为两个,两个所述支撑部4分别设置在所述箱体1的左右两侧。进一步地,以箱体1的横向轴线(箱体1的横向轴线沿水平方向)为对称中心,两个所述支撑部4对称设置在所述箱体1的左右两侧。
本实施例中,升降机构3可以是现有的任一具有升降功能的升降设备,升降机构3例如为丝杆升降机。通过升降机构3的上下移动可以使滑坡监测实验装置的箱体1与地面20的倾斜角度可以在0~20°的范围内灵活调节。
可选地,为了保证箱体1的平衡性,升降机构3为两个,两个所述升降机构3分别设置在所述箱体1的左右两侧。具体地,以箱体1的横向轴线为对称中心,两个所述升降机构3对称设置在箱体1的左右两侧。在每次进行滑坡实验之前,通过控制升降机构3的上下移动可以滑坡监测实验装置的箱体1与地面20的倾斜角度可以在0~20°的范围内灵活调节。
需要指出的是,使用两个丝杆升降机支撑并同步升降,不存在液压升降机的泄压问题,滑坡监测实验装置更加稳定。
以两台丝杆升降机为例,在每次进行滑坡实验之前,根据目标滑体19的倾斜角度调整丝杆升降机的高度,以使滑坡监测实验装置的箱体1与地面20的倾斜角度调整到预设的倾斜角度。在调整丝杆升降机的高度时,可以先粗调后微调,以保证滑坡监测实验装置的箱体1与地面20的倾斜角度的精准,预设的倾斜角度例如为0°、5°、10°、15°、20°。
本实施例中,推进机构5可以是现有的任一能施加推力的推进设备。推进机构5与箱体1间隔的预设距离根据实际情形进行设定,预设距离例如为1厘米。在安装推进机构5时,可以在相同的前方垂直安装一块粗钢板6,前后用斜撑7固定,构成反力架,推进机构5以螺栓方式垂直固定在钢板上,保证推力始终与目标滑体19的滑坡面平行。推进机构 5自身可伸长量例如为100cm,实现目标滑体19长距离可控推行,模拟推移式滑坡过程。
可选地,推进机构5包括驱动组件和板状结构,所述驱动组件用于驱动所述板状结构与所述目标滑体19贴合,并对所述目标滑体19施加平行于箱体底面的推力。其中,板状结构可以通过焊接的方式焊接到推荐机构的推进端,板状结构例如为预设尺寸的钢板,预设尺寸根据实际情形设定,预设尺寸的板状结构可以自由地出入箱体1。其中,驱动组件可以是现有的任一能施加推力的驱动设备,驱动组件例如为千斤顶。
需要指出的是,驱动组件还可以是现有的千斤顶与现有的控制器的组合,通过在控制器中加载PLC(Programmable Logic Controller,可编程逻辑控制器)程序,控制器可以控制现有的千斤顶根据PLC程序所设计的“时间-位移”曲线自动进行力学加载,能够有效研究滑坡演化机制与变形破坏机理,实验过程更加智能可控,千斤顶推力作用点位置可调整,推移速度可以自主设定并自动进行推动。可以通过PLC编程控制千斤顶的推进时间和推进速度,加载出经典的土体滑坡变形三阶段“时间-位移”曲线,在较短时间内实现滑坡的全过程模拟,研究坡体变形破坏过程与声发射信号的对应关系,确定最有效的声音参数,更好的反映滑坡内部的变形破坏特征,有望实现超前预警。根据大量实验的结果,确定临滑时声音参数的预警阈值,指导工程实践。
本实施例中,第一管状构件8可以是任意的金属管,金属管例如钢管、铜管、铝管。第一管状构件8底端所处的深度为预设的深度,预设的深度根据实际情形进行设定,预设的深度例如为自目标滑体19的滑动面竖直向下的20厘米处。
本实施例中,在推进机构5推动目标滑体19的过程中,通过压力传感器11获取推进机构5施加给目标滑体19的推力,通过位移传感器获取所述推进机构5推动目标滑体19 时产生的位移,通过第一声发射传感器13获取目标滑体19在变形过程中的声发射数据。
进一步地,滑坡监测实验装置还包括:第二声发射传感器14、用于插入到目标滑体19 中的第二管状构件9;所述第二声发射传感器14设置在所述第二管状构件9上远离所述目标滑体19的一端,用于检测所述目标滑体19在滑坡过程中的第二声发射信号。
本实施例中,所述第一管状构件8和所述第二管状构件9的材质不同,所述第一管状构件8和所述第二管状构件9的规格相同。第一管状构件8例如为外径40毫米、内径30 毫米、长1米的铝管,第二管状构件9例如为外径40毫米、内径30毫米、长1米的铜管。
根据声波在不同介质中的传播速度不同,基于第一声发射传感器13采集到的第一声发射信号和第二声发射传感器14采集到的第二声发射信号的后续分析,可以定位出声源的深度。
进一步地,滑坡监测实验装置还包括:用于插入到目标滑体19中的测斜管10;所述第一管状构件8和/或所述第二管状构件9在所述测斜管10中。
为了避免声发射能量在土体中的高衰减,在进行滑坡实验之前,先在目标滑体19内打孔,孔内插入一根测斜管10,在将第一管状构件8和/或所述第二管状构件9作为波导放置到测斜管10中,并在第一管状构件8和/或第二管状构件9与测斜管10之间填充诸如硅砂等回填颗粒,形成有源波导,增加声音强度。采用有源波导的声发射测量技术,有效克服土质滑坡声音信号的衰减和环境噪声问题,有利于进行声学参数、力学参数、运动学参数之间定量关系的实验验证和规律探索。
进一步地,滑坡监测实验装置还包括:喷洒机构18、多个水分传感器;
所述喷洒机构设置在所述箱体1的上方,所述喷洒机构用于向所述目标滑体19喷水;
所述多个水分传感器分别设置在所述目标滑体19中不同位置,所述多个水分水分传感器分别用于检测所述目标滑体19渗水后的不同位置处的水分情况。
可选地,所述水分传感器包括以下传感器中的一种或多种:孔隙水压力传感器15、含水量传感器16、吸力传感器17。
本实施例中,喷洒机构18可以是现有的任一具有洒水功能的设备。以现有的降雨自动控制系统为例,降雨自动控制系统包括:喷头、供水管道、变频水泵、电动开关阀、电动调节阀、雨量传感器、压力传感器、控制转接模块、降雨控制软件等,降雨雨强在 10mm-300mm/h之间连续可调,雨滴变化范围1.0mm-6.0mm。降雨强度和降雨量主要依靠变频水泵、电动开关阀、电动调节阀来控制,以及使用雨量传感器和压力传感器对雨强进行反馈与校验,并可通过降雨控制软件来统一管理,根据目前已有的技术和喷头布设方案,可以提供定量、均匀的降雨。
在实验过程中,为了模拟雨强变化范围宽、仿真程度高的自然雨,喷头的布置方式由孔径不同规格的四种喷头围成一个正方形喷头组。喷头组空间上组合叠加,形成一个雨强均匀的降雨区。降雨自动控制系统的供水管道拟选用的是钢衬塑复合管,管道连接方式为: (含50)以下为丝接,
(含50)以下为丝接, 以上为卡箍连接,方便以后检修。在室内模拟自然降雨实验,针对不同下垫面要求降雨环境的控制,并将采集到的雨强、雨量、水位等数据传输到中央控制中心进行存储和分析,可实时在线显示模拟降雨的动态变化曲线。
以上为卡箍连接,方便以后检修。在室内模拟自然降雨实验,针对不同下垫面要求降雨环境的控制,并将采集到的雨强、雨量、水位等数据传输到中央控制中心进行存储和分析,可实时在线显示模拟降雨的动态变化曲线。
为了使得更加清楚的描述本实用新型实施例的滑坡监测实验装置,下面对滑坡实验方法进行描述。本实用新型实施例的滑坡监测实验装置可以进行两种不同滑坡机理的研究,一种是推移式滑坡,另一种是降雨型滑坡,这两种滑坡在自然界中都是广泛存在的,研究价值大,可以模拟和近似还原自然环境中实际发生的滑坡灾害的运动过程和破坏形式。已有的实验装置大多数只能模拟一种滑坡机理,多机理耦合致灾鲜有研究,本实验装置可以同时启动力学加载系统和降雨模拟系统,实现推移式和降雨型滑坡的耦合研究。
第一种实验:推移式滑坡实验。
第一步,在实验之前,通过升降机构3的上下移动调整滑坡监测实验装置的箱体1与地面20的倾斜角度到设定的倾斜角度;推进机构5采用反力架固定在箱体1的前方,并确保推进机构5上所安装的压力传感器11和位移传感器的安装良好。
第二步,在滑坡监测实验装置填土以堆积出目标滑体19。例如,目标滑体19长2m、宽1.5m、高1.5m,坡面为斜面。
需要指出的是,为了更加接近真实地质构造,首先在目标滑体19的底部填土形成一个滑床,目标滑体19与滑床的连接的滑坡面采取连续填土压实的方法,使得滑床和目标滑体 19形成一个整体,更加接近真实地质构造。
制作方法如下:在滑坡监测实验装置中分层填土并压实,例如每10cm为一层,与下层滑床连接的滑坡面处采取连续填土压实的方法,使得滑床和目标滑体19形成一个整体,更加贴近破坏前真实的地质构造。目标滑体19堆积成型后,用刮刀制作斜坡面。将目标滑体19体放置一天,使其自然落实成型,期间注意保湿。
第三步,在目标滑体19中插入第一管状构件8,并在第一管状构件8的顶部安装第一声发射传感器13。
需要指出的是,为了避免声发射能量在土体中的高衰减,先在目标滑体19内打孔,孔内插入一根测斜管10,在将第一管状构件8作为波导放置到测斜管10中,并在第一管状构件8与测斜管10之间填充诸如硅砂等回填颗粒,形成有源波导,增加声音强度。
第四步,启动推进机构5,在推进机构5的推动下目标滑体19,目标滑体19发生剪切破坏和内部压缩变形,滑动面由局部开裂到贯通面逐渐形成,最终目标滑体19发生整体位移。
第五步,采用现有的信号分析处理工具,对压力传感器11采集到的推进机构5施加给目标滑体19的推力、对位移传感器采集到的推进机构5推动目标滑体19时产生的位移、对声发射传感器采集到的目标滑体19在滑坡过程中的声发射信号等进行记录并分析,进行声音参数力学参数、运动学之间定量关系的实验验证和规律探索。
需要指出的是,在做推移式滑坡实验的过程中,还可以通过诸如手机、高清摄像机等拍照装置获取目标滑体19在滑坡过程中的演化图片,便于判别不同滑坡阶段的典型破环特征。
需要指出的时,在做推移式滑坡实验时,还可以定位声源的深度。具体地,在目标滑体19中再插入一根管状构件(即第二管状构件9),在第二管状构件9的顶部安装第二声发射传感器14。当然,为了避免声发射能量在土体中的高衰减,第二管状构件9也插入到测斜管10中。
以第一管状构件8为铝管(外径40毫米、内径30毫米、长1米),第二管状构件9为的铜管(外径40毫米、内径30毫米、长1米)为例,声波在铝管和铜管中的传播速度不同,分别为v1和v2;当声波从目标滑体19的滑面处同时发出,传播完同一段距离,在铜管中的传播过程滞后于铝管,可以根据这一关系列出等式,即t2-t1=h/v2-h/v1。其中,h是滑面距离第一声发射传感器13或第二声发射传感器14的深度,即波导管的长度,对于铝管和黄铜管来说是一致的;v1和v2是确定的值;t1是同时从滑面处发出的振幅最大的声波首次到达铝管上端的第一声发射传感器13的时间,t2是振幅最大的声波首次到达铜管上端的第二声发射传感器14的时间,基于上述等式可以计算出目标滑体19的深度。其中, t1、t2可以通过现有的信号分析处理工具对记录的第一声发射传感器13所采集到的第一声发射信号和第二声发射传感器14所采集到的第二声发射信号进行分析得到,但并不以此为限。
实验结果与分析
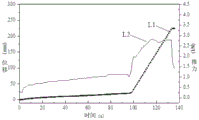
以推进装置为千斤顶为例,在实验加载过程,千斤顶的滑动速度分为三个阶段:减速 50s,匀速50s,加速40s。图2为实验加载过程中推力随时间变化曲线、位移随时间变化曲线。图2中,推力随时间变化曲线为L1,位移随时间变化曲线为L2。由图2可知,滑坡监测实验装置模拟出渐变型滑坡的三阶段(初始变形阶段、等速变形阶段、加速变形阶段) 位移演变,符合设计要求。
图3为实验过程中的振铃计数随时间变化曲线。其中,第一声发射传感器13采集的声发射信号的振铃计数随时间变化曲线为L3,第二声发射传感器14采集的声发射信号的振铃计数随时间变化曲线为L4。第一声发射传感器13和第二声发射传感器14同时采集声发射信号,通过现有的信号分析工具,可得到第一声发射传感器13采集的声发射信号的振铃计数随时间变化曲线L3、第二声发射传感器14采集的声发射信号的振铃计数随时间变化曲线L4。
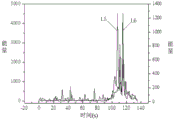
图4为实验过程中的声发射信号的能量随时间变化曲线。其中,第一声发射传感器13 采集的声发射信号的能量随时间变化曲线为L5,第二声发射传感器14采集的声发射信号的能量随时间变化曲线为L6。第一声发射传感器13和第二声发射传感器14同时采集声发射信号,通过现有的信号分析工具,可得到第一声发射传感器13采集的声发射信号的能量随时间变化曲线L5、第二声发射传感器14采集的声发射信号的能量随时间变化曲线L6。
以第一声发射传感器13安装在铝管的顶端、第二声发射传感器14安装在铜管的顶端为例,由于声音在铝管中的传播速度是5000m/s,在铜管中是3750m/s,通过图3和图4可知,声波在铜管中首次达到峰值的时间和整个特征参数曲线稍微落后于铝管,符合预期,进而可以实现滑面定位。
结合图2、图3、图4可知,100s左右,位移和推力急剧上升,第一声发射传感器13 采集的声发射信号的振铃计数、能量和第二声发射传感器14采集的声发射信号的振铃计数、能量随之迅速增加,表明声学参数与力学参数、动力学参数的变化趋势是一致的。
通过对压力传感器11采集的推进机构5施加给目标滑体19的推力,通过位移传感器采集的推进机构5推动所述目标滑体19时产生的位移,通过第一声发射传感器13或第二声发射传感器14采集的目标滑体19在滑坡过程中的声发射信号的后续分析,可以得出振铃计数和滑动速度的关系、推力和滑动加速度的关系、位移、振铃计数积分、能量积分的关系等。需要说明的是,根据推进机构上的位移传感器采集到的位移,也是目标滑体在滑动过程中的产生的位移,根据不同时间所采集到的位移,不难计算出目标滑体的滑动速度和滑动加速度。
图5为振铃计数和滑动速度的关系图。其中,滑动速度随时间变化曲线为L7,第一声发射传感器13或第二声发射传感器14采集的声发射信号的振铃计数随时间变化曲线为L8。
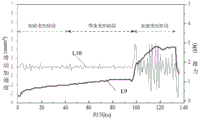
图6为推力和滑动加速度的关系图。其中,推力随时间变化曲线为L9,滑动加速度随时间变化曲线为L10。
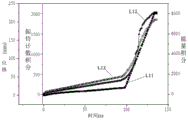
图7为位移、振铃计数积分、能量积分的关系图。其中,位移随时间变化曲线为L11,能量积分随时间变化的曲线为L12,振铃计数积分随时间变化曲线为L13。
图8为位移、振铃计数的关系图。其中,各个离散的点为测量数据,曲线L14为对测量数据进行拟合得到的振铃计数随位移变化曲线。由图5可知,振铃计数和滑动速度整体呈正相关,滑移进入加速阶段,振铃计数和滑动速度同时突然上升,说明振铃计数可以作为较好的滑坡预警参数。
由图6可知,推力和滑动加速度同步变化,在加速变形之前,滑动加速度一直在0附近震荡,100s时,滑动加速度急剧上升,标志滑动破环阶段的来临,滑动加速度也可以作为较好的滑坡预警参数。
由图7可知,振铃计数积分、能量积分和位移的变化趋势一致,曲线十分接近。图7表明振铃计数积分、能量积分与位移的线性关系较好,可以用一次函数量化声学参数和运动参数之间的关系,进而可以用振铃计数积分、能量积分用来追踪位移的变化,监测滑坡的整个过程。
第二种实验:降雨型滑坡实验。
第一步,在实验之前,通过升降机构3的上下移动调整滑坡监测实验装置的箱体1与地面20的倾斜角度到设定的倾斜角度;
第二步,在滑坡监测实验装置填土以堆积出目标滑体19。
第三步,在目标滑体19中插入第一管状构件8,并在第一管状构件8的顶部安装第一声发射传感器13。
需要指出的是,为了避免声发射能量在土体中的高衰减,先在目标滑体19内打孔,孔内插入一根测斜管10,在将第一管状构件8作为波导放置到测斜管10中,并在第一管状构件8与测斜管10之间填充诸如硅砂等回填颗粒,形成有源波导,增加声音强度。
第四步,在目标滑体19的前缘和后缘位置不同深度的孔隙水压力传感器11、含水量传感器和吸力传感器来测量雨水下渗过程中,不同位置土体的内部水文环境,记录孔隙水压力、含水量、吸力等参数随时间的变化。
第五步:启动喷洒机构进行降雨,使目标滑体19能在降雨入渗下,随土体重量增加、强度变化和滑面润滑而沿着滑移面向下缓慢滑动,通过第一声发射传感器13记录滑动过程中的声发射信号;通过孔隙水压力传感器11、含水量传感器和吸力传感器来测量雨水下渗过程中,不同位置土体的内部水文环境,记录孔隙水压力、含水量、吸力等参数随时间的变化。
第六步,采用现有的信号分析处理工具,对第一声发射传感器13采集到的目标滑体 19在滑坡过程中的声发射信号、对孔隙水压力传感器11、含水量传感器和吸力传感器采集到的水分数据进行等进行记录并分析。将声发射信号的声学参数、降雨参数、土体水文参数对比,找出降雨型滑坡不同发育阶段的规律。
需要指出的是,在做推移式滑坡实验的过程中,还可以通过诸如手机、高清摄像机等拍照装置获取目标滑体19在滑坡过程中的演化图片,便于判别不同滑坡阶段的典型破环特征。
需要指出的是,同时进行推移式滑坡和降雨型滑坡的耦合实验,研究滑动速度、速度加载模式、降雨强度、降雨时间、斜坡倾角等各种实验条件的不同组合对滑坡发展过程的影响,探究耦合致灾机理。在推移和降雨的双重作用下,研究声学参数-力学参数-运动学参数-水文参数之间的关系,结合滑坡体的实时变形破坏状态,确定关键监测参数和预警阈值。
本实施例提供的滑坡监测实验装置,包括:箱体、升降机构、推进机构、压力传感器、位移传感器、第一声发射传感器、用于插入到目标滑体中的第一管状构件。其中,所述箱体包括底板,所述底板用于堆积土体以形成所述预设形状的目标滑体;所述升降机构设置在靠近所述箱体的前端处,所述升降机构的上端与所述底板下方铰接,所述升降机构用于调整所述箱体与地面的倾斜角度;所述推进机构设置在靠近所述箱体的前端处且与所述箱体间隔预设距离,所述推进机构用于对所述目标滑体施加平行于箱体底面的推力;所述压力传感器设置在所述推进机构的推进端,用于检测所述推进机构施加给所述目标滑体的推力;所述位移传感器设置在所述推进机构上,用于检测所述推进机构推动所述目标滑体时产生的位移;所述第一声发射传感器设置在所述第一管状构件上远离所述目标滑体的一端,用于检测所述目标滑体在滑坡过程中的第一声发射信号。该装置构造简单,操作简便,整体稳定性好,箱体与地面的倾斜角可调以实现实验工况的灵活设计,力学加载系统可以模拟推移式滑坡的变形演化过程。此外,启动降雨系统可以模拟降雨型滑坡的灾变过程。另外,也可以同时启用力学加载系统和降雨系统,进行推移式滑坡和降雨型滑坡的耦合致灾实验,后续可以研究滑动速度、速度加载模式、降雨强度、降雨时间、斜坡倾角等各种实验条件及其不同组合对滑坡发展过程的影响,通过多种传感器输出的实验数据,探究耦合致灾机理。在推移和降雨的双重作用下,研究声学参数-力学参数-运动学参数-水文参数之间的关系,结合滑坡体的实时变形破坏状态,确定关键监测参数和预警阈值。
在本实用新型的描述中,需要理解的是,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
尽管上面已经示出和描述了本实用新型的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本实用新型的限制,本领域的普通技术人员在本实用新型的范围内可以对上述实施例进行变化、修改、替换和变型。
Claims (10)
1.一种滑坡监测实验装置,其特征在于,包括:箱体、升降机构、推进机构、压力传感器、位移传感器、第一声发射传感器、用于插入到目标滑体中的第一管状构件;
其中,所述箱体包括底板,所述底板用于堆积土体以形成预设形状的目标滑体;所述升降机构设置在靠近所述箱体的前端处,所述升降机构的上端与所述底板下方铰接,所述升降机构用于调整所述箱体与地面的倾斜角度;
所述推进机构设置在靠近所述箱体的前端处且与所述箱体间隔预设距离,所述推进机构用于对所述目标滑体施加平行于箱体底面的推力;
所述压力传感器设置在所述推进机构的推进端,用于检测所述推进机构施加给所述目标滑体的推力;
所述位移传感器设置在所述推进机构上,用于检测所述推进机构推动所述目标滑体时产生的位移;
所述第一声发射传感器设置在所述第一管状构件上远离所述目标滑体的一端,用于检测所述目标滑体在滑坡过程中的第一声发射信号。
2.如权利要求1所述的滑坡监测实验装置,其特征在于,还包括:第二声发射传感器、用于插入到目标滑体中的第二管状构件;
所述第一管状构件和所述第二管状构件的材质不同,所述第一管状构件和所述第二管状构件的规格相同;
所述第二声发射传感器设置在所述第二管状构件上远离所述目标滑体的一端,用于检测所述目标滑体在滑坡过程中的第二声发射信号。
3.如权利要求2所述的滑坡监测实验装置,其特征在于,还包括:用于插入到目标滑体中的测斜管;
所述第一管状构件和/或所述第二管状构件在所述测斜管中。
4.如权利要求1所述的滑坡监测实验装置,其特征在于,还包括:喷洒机构、多个水分传感器;
所述喷洒机构设置在所述箱体的上方,所述喷洒机构用于向所述目标滑体喷水;
所述多个水分传感器分别设置在所述目标滑体中不同位置,所述多个水分传感器分别用于检测所述目标滑体渗水后的不同位置处的水分情况。
5.如权利要求4所述的滑坡监测实验装置,其特征在于,所述水分传感器包括以下传感器中的一种或多种:孔隙水压力传感器、含水量传感器、吸力传感器。
6.如权利要求1所述的滑坡监测实验装置,其特征在于,所述推进机构包括驱动组件和板状结构;
所述驱动组件用于驱动所述板状结构与所述目标滑体贴合,并对所述目标滑体施加平行于箱体底面的推力。
7.如权利要求6所述的滑坡监测实验装置,其特征在于,所述驱动组件为千斤顶。
8.如权利要求1所述的滑坡监测实验装置,其特征在于,所述升降机构为两个,两个所述升降机构分别设置在所述箱体的左右两侧。
9.如权利要求1所述的滑坡监测实验装置,其特征在于,所述升降机构为丝杆升降机。
10.如权利要求1所述的滑坡监测实验装置,其特征在于,所述箱体还包括设置在所述底板上的立体框架,所述立体框架的左右两侧分别设置有透明件。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201920639014.6U CN210665280U (zh) | 2019-05-06 | 2019-05-06 | 滑坡监测实验装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201920639014.6U CN210665280U (zh) | 2019-05-06 | 2019-05-06 | 滑坡监测实验装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN210665280U true CN210665280U (zh) | 2020-06-02 |
Family
ID=70836514
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201920639014.6U Active CN210665280U (zh) | 2019-05-06 | 2019-05-06 | 滑坡监测实验装置 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN210665280U (zh) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113504353A (zh) * | 2021-06-18 | 2021-10-15 | 中国科学院武汉岩土力学研究所 | 一种岩石块体系统崩塌滑坡过程推演装置及试验方法 |
| CN115575604A (zh) * | 2022-09-30 | 2023-01-06 | 清华大学合肥公共安全研究院 | 滑坡诱发机理测试装置及其测试方法 |
| CN117969805A (zh) * | 2024-04-02 | 2024-05-03 | 中国铁道科学研究院集团有限公司铁道建筑研究所 | 大型三维多功能滑坡-防治结构物理试验系统 |
| US12235193B1 (en) | 2024-09-04 | 2025-02-25 | Railway Engineering Research Institute, China Academy Of Railway Sciences Co., Ltd. | Physical test systems of large-scale three-dimensional multi-functional landslide-prevention and control structure |
-
2019
- 2019-05-06 CN CN201920639014.6U patent/CN210665280U/zh active Active
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113504353A (zh) * | 2021-06-18 | 2021-10-15 | 中国科学院武汉岩土力学研究所 | 一种岩石块体系统崩塌滑坡过程推演装置及试验方法 |
| CN115575604A (zh) * | 2022-09-30 | 2023-01-06 | 清华大学合肥公共安全研究院 | 滑坡诱发机理测试装置及其测试方法 |
| CN117969805A (zh) * | 2024-04-02 | 2024-05-03 | 中国铁道科学研究院集团有限公司铁道建筑研究所 | 大型三维多功能滑坡-防治结构物理试验系统 |
| CN117969805B (zh) * | 2024-04-02 | 2024-06-07 | 中国铁道科学研究院集团有限公司铁道建筑研究所 | 大型三维多功能滑坡-防治结构物理试验系统 |
| US12235193B1 (en) | 2024-09-04 | 2025-02-25 | Railway Engineering Research Institute, China Academy Of Railway Sciences Co., Ltd. | Physical test systems of large-scale three-dimensional multi-functional landslide-prevention and control structure |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN210665280U (zh) | 滑坡监测实验装置 | |
| US11860135B2 (en) | Three-dimensional dynamic and static load test system for simulating deep roadway excavation and method thereof | |
| CN106406141B (zh) | 一种用于海底地震波法探测的模型试验系统及方法 | |
| CN108036966B (zh) | 一种精确测量贯入深度及倾斜度的重力活塞取样器 | |
| CN107677791A (zh) | 降雨与交通振动联合作用下边坡失稳物理模型试验装置 | |
| CN108198504B (zh) | 模拟多线盾构穿越既有结构的离心试验装置及其试验方法 | |
| CN110608691B (zh) | 基于声源定位的滑坡深部位移实时监测系统及方法 | |
| CN110967467B (zh) | 一种模拟降雨诱发反序粒堆积体破坏的试验系统 | |
| CN212255324U (zh) | 一种地震与降雨耦合作用下角度可变边坡模型试验装置 | |
| CN114705161B (zh) | 一种具有智能自调功能的市政公路用路基沉降检测装置 | |
| CN111077282A (zh) | 一种基于采动影响的地表土壤理化性质变化模拟系统 | |
| CN108894779A (zh) | 一种煤体瓦斯抽采钻孔失稳判别试验装置及方法 | |
| CN106442941A (zh) | 盾构穿越上部可液化下部坚硬土层的试验装置及试验方法 | |
| CN108680730B (zh) | 一种地震荷载作用下地裂缝场地危害模拟装置及模拟方法 | |
| CN110320279B (zh) | 基于有源波导声发射技术的滑坡监测方法 | |
| CN113008514B (zh) | 一种采空区突水和注浆治理综合试验装置及方法 | |
| CN107884015B (zh) | 一种带有土面整平装置的侧向管土作用测试系统与方法 | |
| CN106012950B (zh) | 一种搭载实时动态监测系统的伺服造波装置及方法 | |
| CN116065553A (zh) | 自动化轻型动力触探设备及触探试验方法 | |
| CN204590103U (zh) | 超重力条件下的基坑开挖模拟装置 | |
| CN207798442U (zh) | 一种精确测量贯入深度及倾斜度的重力活塞取样器 | |
| CN105421326A (zh) | 一种利用声发射技术的土坡稳定性监测仪 | |
| CN208224257U (zh) | 地震荷载作用下地裂缝场地危害模拟装置 | |
| CN115184582B (zh) | 一种水蚀与风蚀耦合侵蚀作用下的岩土滑坡物理模拟装置 | |
| CN116296190A (zh) | 同一装置模拟地震作用下崩塌落石全过程运动的试验方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant |