CN202816213U - Word learning auxiliary device for the blind - Google Patents
Word learning auxiliary device for the blind Download PDFInfo
- Publication number
- CN202816213U CN202816213U CN 201220478484 CN201220478484U CN202816213U CN 202816213 U CN202816213 U CN 202816213U CN 201220478484 CN201220478484 CN 201220478484 CN 201220478484 U CN201220478484 U CN 201220478484U CN 202816213 U CN202816213 U CN 202816213U
- Authority
- CN
- China
- Prior art keywords
- hole
- blind person
- axis
- orifice plate
- worm screw
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn - After Issue
Links
Images

Landscapes
- User Interface Of Digital Computer (AREA)
Abstract
The utility model discloses a word learning auxiliary device for the blind and an operation method thereof. The word learning auxiliary device for the blind comprises a control chip and a display for the blind, wherein the control chip controls the operation of the display for the blind; the display for the blind comprises a hole plate, a needle plate and a needle plate rising and falling device; through holes are arranged on the hole plate; the needle plate is arranged below the hole plate; a needle is below each through hole on the hole plate; the needles are arranged on the needle plate; the needle plate rising and falling device is used for controlling rising and falling of the needles; and the control chip reads Braille or image content, controls the display for the blind to display the Braille or the image content in a needle protruding way for the blind to touch and recognize the word, and reads the word out by calling an intelligent voice pronunciation module.
Description
Technical field
The utility model relates to a kind of character learning servicing unit and operation method thereof, particularly become literate servicing unit and operation method thereof of a kind of blind person.
Background technology
The existing blind person servicing unit of becoming literate roughly has following several:
1 〉. traditional blind person's copybook.It is 99203092.7 patent " reading card for blind person " such as application number.This method is printed on braille on the paperboard, consists of the complete copybook of a cover, and the blind person becomes literate by the braille of direct touch copybook upper process.The major defect of this mode is the not reproducible utilization of copybook, in addition, when the blind person touches the copybook braille, owing to can't accomplish voice synchronous, needs the meaning of other people aid prompting braille, does not reach the effect of unmanned auxiliary, autonomous learning.
2 〉. the implementation of o.According to the resolution needs of display, namely make the spicule of equivalent according to the quantity of pixel, utilize o to control each spicule, when there is blackness handwriting at this pixel place, control the spicule at this place to upper process.The deficiency of this programme is that mainly the quantity of required o is more, and is less feasible when pixel is more, and power consumption is larger.
3 〉. adopt new high-tech material to make blind person's display, finish the braille projection.The implementation that also has at present a kind of blind person's display combines with other resource and can reach the become literate effect of servicing unit of blind person.The implementation method of this kind display is to utilize special material, makes it under the stimulation of electric field, there is the place of writing that deformation can occur and causes projection, thereby for blind person's touch recognition.Its major defect is expensive, at present can't large-scale popularization.
The utility model content
For the above-mentioned existing blind person shortcoming that servicing unit exists of becoming literate, the utility model proposes a kind of blind person become literate servicing unit and operation method thereof.
The technical scheme that the utility model adopts is as follows.
A kind of blind person servicing unit of becoming literate, it comprises control chip, blind person's display, and the work of blind person's display is controlled by described control chip, and described blind person's display comprises orifice plate, needle plate and needle plate jacking gear; Orifice plate is provided with through hole, and needle plate is positioned at the below of orifice plate, and all there is a spicule below of each through hole on the orifice plate, and spicule is installed on the needle plate, and described needle plate jacking gear is used for rising and the decline of control spicule; The front of described orifice plate is for blind person's touch recognition writing, the back side of orifice plate is provided with the switchgear for control through hole open and-shut mode, each through hole is furnished with a switchgear, when through hole when opening state, orifice plate can be passed in the spicule upper end of through hole below, when through hole when closing state, orifice plate can't be passed in the spicule upper end of through hole below; Control chip reads braille, and control blind person display shows the mode of literal by the spicule projection; Through hole on the described orifice plate is determinant arranges, and whether each spicule passes through hole and represent the salient point whether this place has braille.
Further, the described blind person servicing unit of becoming literate also comprises robot arm device, robot arm device comprises y-axis motor, X-axis motor and striking gear, be connected with the Y-axis worm screw on the y-axis motor axle, be provided with Y-axis worm screw slide block on the Y-axis worm screw, Y-axis worm screw slide block top is connected with the X-axis motor, tooth engagement on the motor gear of X-axis motor and the X-axis draw runner, the low order end of X-axis draw runner is provided be used to the striking gear of stirring described switchgear, striking gear is made two dimensional motion under the driving of described y-axis motor and X-axis motor, the work of y-axis motor and X-axis motor is controlled by described control chip.
Further, described switchgear comprises stopper slot and the sliding shoe that can slide in stopper slot, when sliding shoe slides to the center of circle direction of through hole, shelters from through hole, and then switchgear cuts out; When sliding shoe when sliding away from the center of circle direction of through hole, switchgear is namely opened; The movement of sliding shoe is stirred generation by described striking gear.
Further, the two ends width of described sliding shoe on its glide direction is greater than the stopper slot width, and the assurance sliding shoe can not skid off stopper slot fully and come off; Row during described determinant is arranged is vertical with the sliding shoe glide direction.
Further, described spicule lower end by the needle plate spring fitting on needle plate.
Further, striking gear can be stirred arbitrary sliding shoe under the drive of described X-axis motor and y-axis motor, when striking gear when two work between the hole, can carry out opening operation to the through hole that need open in delegation's through hole wherein, the through hole of simultaneously can another Kong Zhongxu that works closing carries out shutoff operation.
Further, described striking gear comprises motor, worm screw, slide block and poke rod, be connected with worm screw on the motor shaft, slide block is set on the worm screw, slide block and poke rod are affixed, the work of the motor of striking gear is controlled by described control chip, when motor positive and inverse, axially move by worm screw band movable slider and poke rod, slide block is in the worm screw centre position during beginning, and under the driving of motor, slide block can be along worm shaft to moving, and make the sliding shoe of the terminal poke hole on-board switching of poke rod device, realize the on-off action to through hole on the orifice plate.
Further, the described blind person servicing unit of becoming literate also comprises SD card, intelligent sound sounding module, determinant keyboard, and described SD card, intelligent sound sounding module, determinant keyboard are electrically connected with control chip respectively; Described SD card is used for pre-stored braille data, and intelligent sound sounding module is used for the pronunciation of literal is quoted, and plays the subsidiary function of synchronous prompting, and determinant keyboard is used for providing repetition sounding and page turn over operation.
The become literate operation method of servicing unit of above-mentioned a kind of blind person, after the initialization, control chip reads braille or picture material, control blind person display shows the mode of literal by the spicule projection, for blind person touch recognition literal, and call intelligent sound sounding module the pronunciation of this literal is sent, by the operation of determinant keyboard, control voluntarily up and down page turning by the blind person, refresh the function that demonstration and literal repeat speech play.
Further, the course of work of described blind person's display is: the needle plate jacking gear descends needle plate, striking gear in the robot arm device begins according to the distribution of braille salient point the switchgear on the orifice plate to be operated, and in that braille salient point place is arranged, opens the switchgear on the orifice plate; Without braille salient point place, then close the switchgear on the orifice plate; Behind the striking gear end of operation, the needle plate jacking gear rises needle plate, and braille salient point place is being arranged, because the switchgear on the orifice plate is opened, the spicule of correspondence position on the needle plate can be protruded upward through the through hole on the orifice plate; Without braille salient point place, because the switchgear on the orifice plate is closed, stop that the spicule of correspondence position passes through through hole on the needle plate.
Compared with prior art, the advantage and the beneficial effect that the utlity model has are as follows:
1, the utility model blind person servicing unit of becoming literate can reach the effect of assisting blind character learning conscientiously, and the implementation cost of its core technology blind person display is comparatively cheap, possesses preferably extendability;
2, utilize simultaneously Control Technique of Microcomputer to reach the true synchronization of braille and voice suggestion, larger help is played in blind person's character learning.
3, blind person's display can be worked as solely as an application, is used for showing other literal and image.
Description of drawings
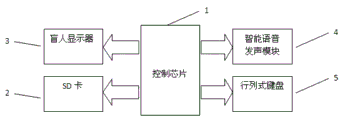
Fig. 1 is general frame synoptic diagram of the present utility model.
Fig. 2 is blind person's display device structure synoptic diagram of the present utility model.
Fig. 3 is the AND DEWATERING FOR ORIFICE STRUCTURE synoptic diagram of blind person's display of the present utility model.
Fig. 4 is the robot arm device structural representation of blind person's display of the present utility model.
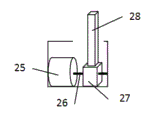
Fig. 5 is the striking gear structural representation of blind person's display of the present utility model.
Fig. 6 is that the needle plate of blind person's display of the present utility model improves structural representation.
Shown in the figure:
1-control chip, 2-SD card, 3-blind person display, 4-intelligent sound sounding module, 5-determinant keyboard, 6-orifice plate, 7-robot arm device, 8-needle plate, 9-needle plate spring, 10-spicule, 11-Z axis motor, 12-Z axis worm screw, 13-Z axis worm screw slide block, 14-through hole, 15-stopper slot, 16-sliding shoe, 17-striking gear movement locus, 18-y-axis motor, 19-Y-axis worm screw, 20-Y-axis worm screw slide block, 21-X-axis motor, 22-motor gear, 23-X-axis draw runner, 24-striking gear, 25-motor, 26-worm screw, 27-slide block, 28-poke rod, 29-sleeve.
Embodiment
Below in conjunction with accompanying drawing enforcement of the present utility model is described further, but enforcement of the present utility model and protection domain are not limited to this.
As shown in Figure 1, a kind of blind person servicing unit of becoming literate comprises control chip 1, SD card 2, blind person's display 3, intelligent sound sounding module 4, determinant keyboard 5.Described SD card 2, blind person's display 3, intelligent sound sounding module 4, determinant keyboard 5 are electrically connected with control chip 1 respectively; Described SD card 2 is used for pre-stored braille data, blind person's display 3 is used to form projection for blind person's touch recognition literal or image, intelligent sound sounding module 4 realizes the conversion of Text To Speech, be used for the pronunciation of literal is quoted, play the subsidiary function of synchronous prompting, determinant keyboard 5 is used for providing repetition sounding and page turn over operation.The work of described blind person's display 3 is by described control chip 1 control.
Shown in accompanying drawing 2,3, described blind person's display 3 comprises orifice plate 6, robot arm device 7, needle plate 8 and needle plate jacking gear; Orifice plate 6 is provided with through hole 14, and needle plate 8 is positioned at the below of orifice plate 6, and all there is a spicule 10 below of each through hole 14 on the orifice plate 6, and spicule 10 is installed on the needle plate 8, and described needle plate jacking gear is used for rising and the decline of control spicule 10; The front of described orifice plate 6 is for blind person's touch recognition writing, the back side of orifice plate 6 is provided with the switchgear for control through hole 14 open and-shut modes, each through hole 14 is furnished with a switchgear, when through hole 14 when opening state, orifice plate 6 can be passed in spicule 10 upper ends of through hole 14 belows, when through hole 14 when closing state, orifice plate 6 can't be passed in spicule 10 upper ends of through hole 14 belows; Through hole 14 on the described orifice plate 6 is determinant arranges, and whether each spicule 10 passes through hole 14 represents the salient point whether this place has braille.
As shown in Figure 4, the X-axis of described rectangular coordinate system is perpendicular to the plane, axle place of axle and the y-axis motor 18 of X-axis motor 21, and Y-axis is parallel to the axle of y-axis motor 18.Described robot arm device 7 comprises y-axis motor 18, X-axis motor 21 and striking gear 24, is connected with Y-axis worm screw 19 on y-axis motor 18 axles, is provided with Y-axis worm screw slide block 20 on the Y-axis worm screw 19.Y-axis worm screw slide block 20 tops are connected with X-axis motor 21, the motor gear 22 of X-axis motor 21 and the tooth engagement on the X-axis draw runner 23.The low order end of X-axis draw runner 23 is provided be used to the striking gear 24 of stirring described switchgear, and striking gear 24 is made two dimensional motion under the driving of described y-axis motor 18 and X-axis motor 21, and the work of y-axis motor 18 and X-axis motor 21 is by described control chip 1 control.
As shown in Figure 3, described switchgear comprises stopper slot 15 and the sliding shoe 16 that can slide in stopper slot 15, when sliding shoe 16 slides to the center of circle direction of through hole 14, shelters from through hole 14, and then switchgear cuts out; When sliding shoe 16 when sliding away from the center of circle direction of through hole 14, switchgear is namely opened; The movement of sliding shoe 16 is stirred generation by described striking gear 24.
The two ends width of described sliding shoe 16 on its glide direction is greater than stopper slot 15 width, and assurance sliding shoe 16 can not skid off stopper slot 15 fully and come off; Row during described determinant is arranged is vertical with sliding shoe 16 glide directions.
As shown in Figure 2, described spicule 10 lower ends are installed on the needle plate 8 by needle plate spring 9.
As further improvement project, as shown in Figure 6, can retrain at needle plate spring 9 and the spicule 10 outer sleeves 29 that arrange, guarantee needle plate spring 9 and 10 axially-movables along sleeve 29 of spicule, oscillating motion does not occur.
Above-mentioned striking gear 24 can be stirred arbitrary sliding shoe 16 under the drive of described X-axis motor 21 and y-axis motor 18, when striking gear 24 when two work between the hole, can carry out opening operation to the through hole that need open in delegation's through hole wherein, the through hole of simultaneously can another Kong Zhongxu that works closing carries out shutoff operation.
Accompanying drawing 3 is depicted as a kind of feasible motion scheme, and striking gear movement locus 17 is " bow " font route.When striking gear 24 moves to the other end from an end of the first row, can carry out shutoff operation to the through hole that this Kong Zhongxu that works closes.Move successively by " bow " font route, striking gear 24 can carry out opening operation to the through hole that need open in delegation's through hole wherein when two work between the hole, and the while can be carried out shutoff operation to the through hole that another Kong Zhongxu that works closes.When striking gear 24 moves to the other end from the end of last column, can carry out opening operation to the through hole that this Kong Zhongxu that works opens." bow " font can be adjusted according to the actual requirements, if some capable needs opens or closes operation to through hole, the two ends that then can be expert at are directly along moving perpendicular to the direction of row, not enterprising line operate in the row direction.
As shown in Figure 5, described striking gear 24 comprises motor 25, worm screw 26, slide block 27 and poke rod 28, be connected with worm screw 26 on motor 25 axles, slide block 27 is set on the worm screw 26, slide block 27 is affixed with poke rod 28, the work of the motor 25 of striking gear is by described control chip 1 control, when motor 25 rotating, axially move by worm screw 26 band movable sliders 27 and poke rod 28, slide block 27 is in worm screw 26 centre positions during beginning, and under the driving of motor 25, slide block 27 can axially move along worm screw 26, and make poke rod 28 ends stir the sliding shoe 16 of switchgear on the orifice plate 6, realize the on-off action to through hole 14 on the orifice plate 6.
As shown in Figure 2, described needle plate jacking gear comprises Z axis motor 11, Z axis worm screw 12, Z axis worm screw slide block 13.Z axis worm screw slide block 13 is arranged on the Z axis worm screw 12, is positioned at Z axis motor 11 tops.Described needle plate 8 is fixed in Z axis worm screw slide block 13 tops, when 11 rotating of Z axis motor, can drive needle plate 8 and rise or descend.The work of described Z axis motor 11 is by described control chip 1 control.
Described intelligent sound sounding module 4 can adopt chip SYN6288.Intelligent sound sounding module 4 receives lteral data by serial port, realizes the conversion of Text To Speech; Directly be connected with control chip 1 by the serial ports pin, need not level conversion.
The become literate operation method of servicing unit of a kind of blind person of the present utility model, it is characterized in that, after the initialization, control chip 1 reads braille or picture material, and control blind person display 3 shows the mode of literal by spicule 10 projections, for blind person's touch recognition literal, and call intelligent sound sounding module 4 pronunciation of this literal is sent, by the operation of determinant keyboard 5, control voluntarily up and down page turning by the blind person, refresh the function that demonstration and literal repeat speech play.
The become literate operation method of servicing unit of above-mentioned a kind of blind person, the course of work that it is characterized in that described blind person's display 3 is: the needle plate jacking gear descends needle plate 8, striking gear 24 beginnings in the robot arm device 7 operate the switchgear on the orifice plate 6 according to the distribution of braille salient point, in that braille salient point place is arranged, open the switchgear on the orifice plate 6; Without braille salient point place, then close the switchgear on the orifice plate 6; Behind striking gear 24 end of operations, the needle plate jacking gear rises needle plate 8, and braille salient point place is being arranged, because the switchgear on the orifice plate 6 is opened, the spicule 10 of correspondence position on the needle plate 8 can be protruded upward through the through hole 14 on the orifice plate 6; Without braille salient point place, because the switchgear on the orifice plate 6 is closed, stop that the spicule 10 of correspondence position on the needle plate 8 is by through hole 14.Thereby for blind person's touch recognition, realized the function of blind person's display.
Claims (8)
1. blind person servicing unit of becoming literate is characterized in that comprising control chip, blind person's display, and the work of blind person's display is controlled by described control chip, and described blind person's display comprises orifice plate, needle plate and needle plate jacking gear; Orifice plate is provided with through hole, and needle plate is positioned at the below of orifice plate, and all there is a spicule below of each through hole on the orifice plate, and spicule is installed on the needle plate, and described needle plate jacking gear is used for rising and the decline of control spicule; The front of described orifice plate is for blind person's touch recognition writing, the back side of orifice plate is provided with the switchgear for control through hole open and-shut mode, each through hole is furnished with a switchgear, when through hole when opening state, orifice plate can be passed in the spicule upper end of through hole below, when through hole when closing state, orifice plate can't be passed in the spicule upper end of through hole below; Control chip reads braille, and control blind person display shows the mode of literal by the spicule projection; Through hole on the described orifice plate is determinant arranges, and whether each spicule passes through hole and represent the salient point whether this place has braille.
2. a kind of blind person according to claim 1 servicing unit of becoming literate, characterized by further comprising robot arm device, robot arm device comprises y-axis motor, X-axis motor and striking gear, be connected with the Y-axis worm screw on the y-axis motor axle, be provided with Y-axis worm screw slide block on the Y-axis worm screw, Y-axis worm screw slide block top is connected with the X-axis motor, tooth engagement on the motor gear of X-axis motor and the X-axis draw runner, the low order end of X-axis draw runner is provided be used to the striking gear of stirring described switchgear, striking gear is made two dimensional motion under the driving of described y-axis motor and X-axis motor, the work of y-axis motor and X-axis motor is controlled by described control chip.
3. a kind of blind person according to claim 2 servicing unit of becoming literate is characterized in that described switchgear comprises stopper slot and the sliding shoe that can slide in stopper slot, when sliding shoe slides to the center of circle direction of through hole, shelters from through hole, and then switchgear cuts out; When sliding shoe when sliding away from the center of circle direction of through hole, switchgear is namely opened; The movement of sliding shoe is stirred generation by described striking gear.
4. a kind of blind person according to claim 3 servicing unit of becoming literate is characterized in that the two ends width of described sliding shoe on its glide direction greater than the stopper slot width, guarantees that sliding shoe can not skid off stopper slot fully and comes off; Row during described determinant is arranged is vertical with the sliding shoe glide direction.
5. a kind of blind person according to claim 2 servicing unit of becoming literate is characterized in that, described spicule lower end by the needle plate spring fitting on needle plate.
6. a kind of blind person according to claim 2 servicing unit of becoming literate, it is characterized in that striking gear can stir arbitrary sliding shoe under the drive of described X-axis motor and y-axis motor, when striking gear when two work between the hole, can carry out opening operation to the through hole that need open in delegation's through hole wherein, the through hole of simultaneously can another Kong Zhongxu that works closing carries out shutoff operation.
7. a kind of blind person according to claim 2 servicing unit of becoming literate, it is characterized in that described striking gear comprises motor, worm screw, slide block and poke rod, be connected with worm screw on the motor shaft, slide block is set on the worm screw, slide block and poke rod are affixed, the work of the motor of striking gear is controlled by described control chip, when motor positive and inverse, axially move by worm screw band movable slider and poke rod, slide block is in the worm screw centre position during beginning, and under the driving of motor, slide block can be along worm shaft to moving, and make the sliding shoe of the terminal poke hole on-board switching of poke rod device, realize the on-off action to through hole on the orifice plate.
8. a kind of blind person according to claim 1 servicing unit of becoming literate characterized by further comprising SD card, intelligent sound sounding module, determinant keyboard, and described SD card, intelligent sound sounding module, determinant keyboard are electrically connected with control chip respectively; Described SD card is used for pre-stored braille data, and intelligent sound sounding module is used for the pronunciation of literal is quoted, and plays the subsidiary function of synchronous prompting, and determinant keyboard is used for providing repetition sounding and page turn over operation.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN 201220478484 CN202816213U (en) | 2012-09-19 | 2012-09-19 | Word learning auxiliary device for the blind |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN 201220478484 CN202816213U (en) | 2012-09-19 | 2012-09-19 | Word learning auxiliary device for the blind |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN202816213U true CN202816213U (en) | 2013-03-20 |
Family
ID=47875059
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN 201220478484 Withdrawn - After Issue CN202816213U (en) | 2012-09-19 | 2012-09-19 | Word learning auxiliary device for the blind |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN202816213U (en) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102855791A (en) * | 2012-09-19 | 2013-01-02 | 华南理工大学 | Literacy auxiliary device for the blind and operating method of literacy auxiliary device for the blind |
| CN103985288A (en) * | 2014-05-13 | 2014-08-13 | 太原理工大学 | Multifunctional Braille voice device |
| CN106446887A (en) * | 2016-11-07 | 2017-02-22 | 罗杰仁 | Method and device for converting picture into voice |
| CN108831259A (en) * | 2018-07-05 | 2018-11-16 | 浙江理工大学 | The braille point of four cam coaxials driving shows device |
| CN109643501A (en) * | 2014-10-30 | 2019-04-16 | 金柱润 | Braille display and electronic equipment comprising Braille display |
| CN110782610A (en) * | 2018-07-31 | 2020-02-11 | 横河电机株式会社 | Apparatus, method and storage medium |
-
2012
- 2012-09-19 CN CN 201220478484 patent/CN202816213U/en not_active Withdrawn - After Issue
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102855791A (en) * | 2012-09-19 | 2013-01-02 | 华南理工大学 | Literacy auxiliary device for the blind and operating method of literacy auxiliary device for the blind |
| CN102855791B (en) * | 2012-09-19 | 2014-09-10 | 华南理工大学 | Literacy auxiliary device for the blind and operating method of literacy auxiliary device for the blind |
| CN103985288A (en) * | 2014-05-13 | 2014-08-13 | 太原理工大学 | Multifunctional Braille voice device |
| CN109643501A (en) * | 2014-10-30 | 2019-04-16 | 金柱润 | Braille display and electronic equipment comprising Braille display |
| CN106446887A (en) * | 2016-11-07 | 2017-02-22 | 罗杰仁 | Method and device for converting picture into voice |
| CN108831259A (en) * | 2018-07-05 | 2018-11-16 | 浙江理工大学 | The braille point of four cam coaxials driving shows device |
| CN110782610A (en) * | 2018-07-31 | 2020-02-11 | 横河电机株式会社 | Apparatus, method and storage medium |
| CN110782610B (en) * | 2018-07-31 | 2021-12-28 | 横河电机株式会社 | Apparatus, method and storage medium |
| US11568719B2 (en) | 2018-07-31 | 2023-01-31 | Yokogawa Electric Corporation | Device, method, and recording medium |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102855791B (en) | Literacy auxiliary device for the blind and operating method of literacy auxiliary device for the blind | |
| CN202816213U (en) | Word learning auxiliary device for the blind | |
| CN104302370B (en) | Transformable automobile toy | |
| CN105575224A (en) | Unordered English word auxiliary memory device | |
| CN203733335U (en) | Chinese phonetic alphabet teaching aid | |
| CN205692437U (en) | Braille learning machines based on three needle drivers | |
| CN209336344U (en) | Wisdom blackboard seamless splicing structure | |
| CN203588498U (en) | English teaching device capable of facilitating teacher and student interaction | |
| CN201142160Y (en) | Electromagnetic relay teaching model | |
| CN203055215U (en) | Rotary pinyin teaching disc with audio function | |
| CN205140222U (en) | High -efficient taste english learning device | |
| CN105654813B (en) | Braille learning machine based on three needle drivers | |
| CN110328989A (en) | A kind of hand-written script blackboard writing machine | |
| CN105303932A (en) | Bump Braille pronunciation reading and self-learning method | |
| CN205121921U (en) | Taste english learning device | |
| CN208873342U (en) | A kind of experiment device for teaching of traffic signals | |
| CN209199389U (en) | Ideology and politics auxiliary teaching device | |
| CN110859402A (en) | Intelligent learning table based on motion sensing technology | |
| CN2672801Y (en) | Voice book | |
| CN205486873U (en) | Electronic alphabet carousel | |
| CN201105593Y (en) | Electric blackboard eraser | |
| CN202694605U (en) | Multifunctional Koran reading pen having screen | |
| CN206348963U (en) | A kind of Chinese speech teaching aid | |
| CN205983926U (en) | Educational machine people with high appearance function of clapping | |
| CN214226177U (en) | Music reading board for music teaching |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| AV01 | Patent right actively abandoned |
Granted publication date: 20130320 Effective date of abandoning: 20140910 |
|
| RGAV | Abandon patent right to avoid regrant |