CN202491237U - Master-slave control robot work platform for high-pressure hot-line work - Google Patents
Master-slave control robot work platform for high-pressure hot-line work Download PDFInfo
- Publication number
- CN202491237U CN202491237U CN2012201380061U CN201220138006U CN202491237U CN 202491237 U CN202491237 U CN 202491237U CN 2012201380061 U CN2012201380061 U CN 2012201380061U CN 201220138006 U CN201220138006 U CN 201220138006U CN 202491237 U CN202491237 U CN 202491237U
- Authority
- CN
- China
- Prior art keywords
- robot
- platform
- control
- hydraulic
- manipulating task
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images



Landscapes
- Forklifts And Lifting Vehicles (AREA)
- Manipulator (AREA)
Abstract
本实用新型涉及一种高压带电作业主从控制机器人作业平台,包括机器人作业平台支承架、液压升降平台控制集成、机器人操作系统和绝缘斗。机器人作业平台支承架呈L形结构,通过螺栓连接到斗臂车绝缘升降臂末端;为液压升降平台控制集成、机器人操作系统和绝缘斗提供可靠支承;液压升降平台控制集成位于绝缘斗右侧,操作人员通过控制杆和操作柄,为机器人作业平台提供升、降及旋转运动,并供给主从控制机器人运动所需的液压油源;机器人操作系统包括操控主手、液压机械臂及相应控制模块,采用主从控制液压驱动,机械臂可以完全跟随主手运动;操作人员站在绝缘斗内,操控主手可以远程遥控机械臂夹持专用工具接触线路完成各种高压带电作业。
The utility model relates to a master-slave control robot operation platform for high-voltage live work, which comprises a robot operation platform support frame, a hydraulic lifting platform control integration, a robot operating system and an insulating bucket. The support frame of the robot operation platform is in an L-shaped structure, which is connected to the end of the insulating lifting arm of the bucket arm truck through bolts; it provides reliable support for the control integration of the hydraulic lifting platform, the robot operating system and the insulating bucket; the control integration of the hydraulic lifting platform is located on the right side of the insulating bucket. The operator provides the lifting, lowering and rotating motion for the robot work platform through the control rod and the operating handle, and supplies the hydraulic oil source required for the master-slave to control the robot's movement; the robot operating system includes the master hand, the hydraulic manipulator and the corresponding control module , using master-slave control hydraulic drive, the mechanical arm can completely follow the movement of the master hand; the operator stands in the insulating bucket, and the master hand can remotely control the manipulator arm to clamp special tools to contact the line to complete various high-voltage live work.
Description
技术领域 technical field
本实用新型涉及一种机器人高空作业平台,尤其是一种高压带电作业主从控制机器人作业平台。The utility model relates to a robot aerial work platform, in particular to a master-slave control robot work platform for high-voltage live work.
背景技术 Background technique
高压线路的带电作业是电力设备测试、检修、改造的重要手段,它为提高供电可靠性,减少停电损失、保证电网安全做出了巨大贡献。带电作业对操作人员的技术水平和熟练程度、气候条件、安全防护用具等要求非常严格,由于担心安全隐患、缺乏合适的人身安全防护用具及带电作业技术培训不够等,部分地区对配电线路的带电作业进行了限制,致使配电线路停电作业频繁,配电可靠性指标不能完成,从而给电力企业带来了很大的经济损失,给人民生活和生产带来了很大的不便。目前作业现场广泛采用绝缘斗臂车中间电位作业方法,操作人员使用原始工具手动完成带电作业任务,其存在着如下缺陷:Live work on high-voltage lines is an important means of testing, repairing, and transforming power equipment. It has made great contributions to improving the reliability of power supply, reducing power failure losses, and ensuring the safety of the power grid. Live work has very strict requirements on the technical level and proficiency of operators, climate conditions, and safety protection equipment. Due to concerns about potential safety hazards, lack of suitable personal safety protection equipment, and insufficient technical training for live work, some areas have strict regulations on power distribution lines. Live work has been restricted, resulting in frequent power outages on distribution lines, and distribution reliability indicators cannot be completed, which has brought great economic losses to power companies and great inconvenience to people's lives and production. At present, the middle potential working method of the insulated arm truck is widely used on the job site, and the operator uses the original tools to manually complete the live work task, which has the following defects:
(1)劳动强度大,效率低,自动化水平低。(1) High labor intensity, low efficiency and low automation level.
(2)操作人员直接接触高压导线,存在很大的安全隐患。(2) Operators directly contact high-voltage wires, which poses a great potential safety hazard.
(3)人工带电作业安全防护、遮蔽要求非常严格,稍不注意就会出现短路电流,造成重大的安全事故,引发人身伤亡事故。(3) The safety protection and shielding requirements of manual live work are very strict, and short-circuit current will occur if you don't pay attention, causing major safety accidents and personal casualties.
中国专利02135135公开了一种高压带电作业机器人装置,其包括移动汽车、升降机构、绝缘支撑平台、作业机械臂、液压机械手、隔离变压器、发电机和液压油泵、控制柜,升降机构、发电机和液压泵安装在汽车底盘上,绝缘支撑平台与升降机构的末端相联。作业机械臂、隔离变压器和低压控制柜安装在绝缘支撑平台上。作业机械臂由电机驱动,机械手由液压驱动,计算机通过低压控制装置控制作业机械臂和机械手及其所夹持的装用工具完成各种高压带电作业。但是,其作业机械臂采用电机驱动,机械手采用液压驱动,提供动力源的发电机和液压泵却安装在汽车底盘上,只能通过拖动长长的导线和油管与作业机械臂和机械手相连,这样作业绝缘支撑平台与汽车底盘处于同一电位,极容易造成绝缘平台接地,因此存在很大安全隐患;另外,涉及高压带电作业,操作人员的绝缘安全至关重要,而该专利并未指出操作人员在作业平台的作业位置,也未说明操作人员与作业平台、带电设备、作业机械臂等之间是否保持在安全距离内,而这些问题直接决定该高压带电作业机器人装置是否切实可行。Chinese patent 02135135 discloses a high-voltage live working robot device, which includes a mobile car, a lifting mechanism, an insulating support platform, a working robot arm, a hydraulic manipulator, an isolation transformer, a generator and a hydraulic oil pump, a control cabinet, a lifting mechanism, a generator and The hydraulic pump is installed on the chassis of the car, and the insulating support platform is connected with the end of the lifting mechanism. The working robot arm, isolation transformer and low-voltage control cabinet are installed on the insulating support platform. The working manipulator is driven by a motor, and the manipulator is driven by hydraulic pressure. The computer controls the working manipulator, manipulator and the tools held by it through a low-voltage control device to complete various high-voltage live work. However, the operating manipulator is driven by a motor, and the manipulator is driven by hydraulic pressure. The generator and hydraulic pump that provide the power source are installed on the chassis of the car, and can only be connected to the work manipulator and manipulator by dragging long wires and oil pipes. In this way, the insulating support platform and the chassis of the vehicle are at the same potential, which is very likely to cause the grounding of the insulating platform, so there is a great potential safety hazard; in addition, when high-voltage live work is involved, the insulation safety of the operator is very important, and the patent does not point out that the operator In the working position of the working platform, it is not stated whether the operator is kept within a safe distance from the working platform, live equipment, working robot arm, etc., and these issues directly determine whether the high-voltage live working robot device is feasible.
申请人申请的中国专利:ZL201020278798公开了一种高压带电作业机器人绝缘系统。其包括斗臂车,斗臂车设有斗臂车绝缘臂,在斗臂车绝缘臂顶部设有绝缘平台,绝缘平台上安装有独立的机械手操作装置和操作主手系统,他们采用分开独立供电方式,彼此间采用光纤通信。它可使高压带电作业机器人通过绝缘斗臂车进行相对地绝缘,通过光纤通信实现高压线对人的绝缘,机械臂外包玻璃钢、绝缘平台外包玻璃钢、边相加遮蔽罩进行相间绝缘系统。但是,该专利只是从实现高压带电作业的功能角度考虑机器人绝缘系统,并未说明操作人员、机械手操作装置和操作主手系统之间,是通过怎样空间布局来实现系统绝缘。其所述的机械手操作装置和操作主手系统,只是简单罗列出各组成部分的相互连接关系,并未说明各组成部分在绝缘平台上的位置关系。另外,鉴于高压带电作业特点,绝缘平台应在满足升降平台最大载荷前提下,尽可能设计尺寸要小,占用空间小,避免作业时触及导线或其他带电设备,而该专利只是含糊指出绝缘机械臂I和绝缘机械臂II的底座间距不小于0.4m,两者与主手控制器安全距离不小于0.4m,到底安全距离为多少,才能既满足绝缘要求又满足高空作业要求,该专利并没有给出确切答案,因此该高压带电作业机器人绝缘系统在实践中并不可行,而只是一种设计方案或设计思路。The Chinese patent applied by the applicant: ZL201020278798 discloses an insulation system for a high-voltage live working robot. It includes a bucket arm truck. The bucket arm truck is equipped with an insulating arm of the bucket arm truck. An insulating platform is installed on the top of the insulating arm of the bucket arm truck. An independent manipulator operating device and an operating main hand system are installed on the insulating platform. They use separate and independent power supplies. way, using optical fiber communication with each other. It enables the high-voltage live working robot to be insulated relative to the ground through the insulating arm truck, and the high-voltage line to be insulated from the human body through optical fiber communication. The manipulator arm is covered with glass fiber reinforced plastic, the insulating platform is covered with glass fiber reinforced plastic, and the side-to-side shield is used for phase-to-phase insulation system. However, this patent only considers the robot insulation system from the perspective of realizing the function of high-voltage live work, and does not explain how the space layout between the operator, the manipulator operating device and the operating main hand system is used to achieve system insulation. The manipulator operating device and the operating main hand system described simply list the interconnection relationship of each component, and do not explain the positional relationship of each component on the insulating platform. In addition, in view of the characteristics of high-voltage live work, the insulating platform should be designed to be as small as possible under the premise of meeting the maximum load of the lifting platform, occupying a small space, and avoid touching wires or other live equipment during operation, but the patent only vaguely points out that the insulating mechanical arm The distance between the bases of I and the insulating manipulator II is not less than 0.4m, and the safe distance between the two and the main hand controller is not less than 0.4m. How much is the safe distance to meet both the insulation requirements and the high-altitude operation requirements? This patent does not give Therefore, the insulation system of the high-voltage live working robot is not feasible in practice, but only a design scheme or design idea.
实用新型内容 Utility model content
本实用新型的目的是为克服上述现有技术的不足,提供一种新型高压带电作业主从控制机器人作业平台,应用于作业现场,代替人工完成带电作业任务,减轻作业人员的劳动强度,提高作业效率和操作安全性。The purpose of this utility model is to overcome the deficiencies of the prior art above, to provide a new type of high-voltage live work master-slave control robot work platform, which is applied to the work site to replace the manual completion of live work tasks, reduce the labor intensity of operators, and improve the operation efficiency. efficiency and operational safety.
为实现上述目的,本实用新型采用下述技术方案:In order to achieve the above object, the utility model adopts the following technical solutions:
一种高压带电作业主从控制机器人作业平台,包括机器人作业平台支承架、液压升降平台控制集成、机器人操作系统和绝缘斗。A master-slave control robot operating platform for high-voltage live work, including a robot operating platform support frame, a hydraulic lifting platform control integration, a robot operating system, and an insulating bucket.
所述机器人作业平台支承架由机器人作业平台底架和机器人作业平台侧面连接架连接组成的L形结构,为液压升降平台控制集成、机器人操作系统和绝缘斗提供可靠支承;所述机器人作业平台支承架采用钢结构方管焊接而成,钢型材表面均用环氧玻璃布搭边缠绕;作业平台侧面连接架上设有螺栓孔,可以通过螺栓连接到斗臂车绝缘升降臂末端;所述机器人作业平台底架上、下及四周表面采用4mm环氧绝缘板粘合而成,在施加1分钟工频交流电压45Kv作用下,不发生击穿、闪络和严重过热现象发生,在测试电压20Kv作用下,交流泄露值不大于200μA。The support frame of the robot operation platform is an L-shaped structure composed of the bottom frame of the robot operation platform and the side connecting frame of the robot operation platform, which provides reliable support for the control integration of the hydraulic lifting platform, the robot operating system and the insulating bucket; the support of the robot operation platform The frame is welded by steel structure square tubes, and the surface of the steel profiles is wrapped with epoxy glass cloth; there are bolt holes on the connecting frame on the side of the work platform, which can be connected to the end of the insulated lifting arm of the bucket arm truck through bolts; the robot The upper, lower and surrounding surfaces of the work platform chassis are bonded with 4mm epoxy insulating boards. Under the action of a power frequency AC voltage of 45Kv for 1 minute, no breakdown, flashover and severe overheating will occur. When the test voltage is 20Kv Under the action, the AC leakage value is not greater than 200μA.
所述液压升降平台控制集成包括箱体,箱体上设有控制杆、操作柄和应急按钮,操作人员可以实时控制机器人平台的升降和俯仰,将平台输送到高空合适作业位置;紧急情况可以按下应急按钮,切断供给机械臂液压油路,保证人机安全。The control integration of the hydraulic lifting platform includes a box body, which is equipped with a control lever, an operating handle and an emergency button. The operator can control the lifting and pitching of the robot platform in real time, and transport the platform to a suitable high-altitude working position; Press the emergency button to cut off the hydraulic oil circuit supplying the manipulator to ensure the safety of man and machine.
所述操控主手包括安装在机器人作业平台侧面连接架顶部的左、右两主手,两主手中心间距0.8m,距离机器人作业平台支承架上表面1m;在机器人作业平台侧面连接架的内侧面、绝缘斗上侧安装有与左、右主手通信的终端控制盒,两终端控制盒中心间距0.6m;在机器人作业平台侧面连接架的外侧面上,通过微控制器连接架连接分别为左、右主手提供控制和远程通信功能的左、右微控制器,两微控制器中心间距1m;在机器人作业平台底架上绝缘斗的左侧设有为微控制器和主手提供电源的微控制器电源集成。The main control hands include the left and right main hands installed on the top of the side connecting frame of the robot operation platform, the distance between the centers of the two main hands is 0.8m, and the distance from the upper surface of the support frame of the robot operation platform is 1m; Terminal control boxes communicating with the left and right main hands are installed on the side and the upper side of the insulating bucket, and the distance between the centers of the two terminal control boxes is 0.6m; The left and right main hands provide the left and right microcontrollers with control and remote communication functions. The distance between the centers of the two microcontrollers is 1m; microcontroller power integration.
所述液压机械臂包括左、右两机械臂,所述两机械臂通过支承绝缘子安装于机器人作业平台底架上面前部两侧,并外包橡胶套袖;支承绝缘子高度0.6m,两机械臂中心间距1m;所述机械臂的进、回油管都连接到液压升降平台控制集成内;所述机械臂由七个自由度运动的硬铝合金材料制成;所述左、右两机械臂的腰部回转自由度外侧设有置于支承绝缘子的支承架上的左、右两液压伺服控制盒,距离机器人作业平台支承架上表面0.6m,该控制盒是机械臂的外部接口,通过光纤与微控制器相连。The hydraulic mechanical arm includes two mechanical arms, left and right. The two mechanical arms are installed on both sides of the front of the bottom frame of the robot work platform through support insulators, and are covered with rubber sleeves; the height of the support insulator is 0.6m, and the center of the two mechanical arms The spacing is 1m; the oil inlet and return pipes of the mechanical arm are connected to the control integration of the hydraulic lifting platform; the mechanical arm is made of duralumin alloy with seven degrees of freedom; the waists of the left and right mechanical arms are There are left and right hydraulic servo control boxes placed on the support frame supporting the insulator on the outer side of the degree of freedom of rotation, 0.6m away from the upper surface of the support frame of the robot operation platform. The control box is the external interface of the mechanical arm. connected to the device.
所述主手和机械臂是同构的,机械臂采用液压伺服驱动,左、右主手可以单独控制相应机械臂运动。The main hand and the mechanical arm are isomorphic, the mechanical arm is driven by hydraulic servo, and the left and right main hands can independently control the movement of the corresponding mechanical arm.
所述终端控制盒为带液晶显示的控制盒,显示系统诊断信息和允许操作者选择操作功能。The terminal control box is a control box with a liquid crystal display, which displays system diagnostic information and allows the operator to select operating functions.
所述绝缘斗设置于主手和机械臂之间,位于机器人作业平台侧面连接架内侧正中位置,通过螺栓连接到机器人作业平台侧面连接架上;绝缘斗高度1.2m,双层绝缘,内层材料采用聚四氟乙烯,外层材料采用玻璃钢。The insulating bucket is set between the main hand and the mechanical arm, located in the center of the inner side of the connecting frame on the side of the robot work platform, and connected to the side connecting frame of the robot working platform through bolts; the height of the insulating bucket is 1.2m, double-layer insulation, the inner layer material Teflon is used, and the outer material is made of glass fiber reinforced plastic.
本实用新型包括机器人作业平台支承架、液压升降平台控制集成、机器人操作系统和绝缘斗。机器人作业平台支承架可侧面螺栓连接到斗臂车绝缘升降臂末端,借助绝缘斗臂车实现机器人作业平台对地绝缘。液压升降平台控制集成通过控制杆和操作柄,为机器人作业平台提供升、降及旋转运动,并供给主从控制机器人运动所需的液压油源。机器人操作系统由主手、机械臂(从手)、液压伺服控制盒、微控制器、手持终端控制盒和微控制器电源集成等组成。机械臂采用液压伺服控制方式,可以完全跟随主手来运动。操作者站在平台绝缘斗内,操控主手可以远程遥控机械臂夹持专用工具接触线路完成各种高压带电作业。The utility model comprises a support frame of a robot operation platform, a control integration of a hydraulic lifting platform, a robot operating system and an insulating bucket. The support frame of the robot operation platform can be bolted to the end of the insulating lifting arm of the bucket arm truck on the side, and the robot operation platform is insulated from the ground by means of the insulating bucket arm truck. The hydraulic lifting platform control integration provides the lifting, lowering and rotating movements for the robot work platform through the control rod and the operating handle, and supplies the hydraulic oil source required for the master-slave to control the robot's movement. The robot operating system consists of a master hand, a mechanical arm (slave hand), a hydraulic servo control box, a microcontroller, a handheld terminal control box, and microcontroller power integration. The mechanical arm adopts hydraulic servo control method, which can completely follow the movement of the main hand. The operator stands in the insulating bucket of the platform, and controls the main hand to remotely control the manipulator arm to clamp the special tool to contact the line to complete various high-voltage live work.
机器人作业平台支承架为液压升降平台控制集成、机器人操作系统和绝缘斗提供可靠平台支承。机器人作业平台支承架采用钢结构方管焊接而成,钢型材裸露表面均用环氧玻璃布缠绕,整体平台底架采用环氧绝缘板外包,防止作业时平台接触导线及其他带电设备造成相间短路。The support frame of the robot operation platform provides reliable platform support for the control integration of the hydraulic lifting platform, the robot operating system and the insulating bucket. The support frame of the robot operation platform is welded by steel structure square tubes, the exposed surface of the steel profiles is wrapped with epoxy glass cloth, and the overall platform chassis is outsourced with epoxy insulating boards to prevent phase-to-phase short circuit caused by the platform contacting wires and other live equipment during operation .
液压升降平台控制集成设有控制杆、操作柄和应急按钮,操作人员可以实时控制机器人平台的升降和俯仰,将平台输送到高空合适作业位置;紧急情况可以按下应急按钮,切断供给机械臂液压油路,保证人机安全。The hydraulic lifting platform control integration is equipped with a control lever, an operating handle and an emergency button. The operator can control the lifting and pitching of the robot platform in real time, and transport the platform to a suitable working position at high altitude; in an emergency, the emergency button can be pressed to cut off the hydraulic pressure supply to the mechanical arm. The oil circuit ensures the safety of man and machine.
机器人操作系统由主手、机械臂(从手)、液压伺服控制盒、微控制器、终端控制盒和微控制器电源集成等组成。The robot operating system consists of a master hand, a mechanical arm (slave hand), a hydraulic servo control box, a microcontroller, a terminal control box, and microcontroller power integration.
主手安装在机器人作业平台侧面连接架顶部,根据传感器采集信息来操作机械臂运动。主手与机械臂(从手)是同构的,采用液压伺服驱动,机械臂可以完全跟随主手来运动。操作者站在绝缘斗内,主手与机械臂之间仅通过光纤通讯,确保人员完全与高压电场隔离,极大提高了操作人员带电操作安全性。The main hand is installed on the top of the connecting frame on the side of the robot operation platform, and operates the movement of the mechanical arm according to the information collected by the sensor. The main hand and the mechanical arm (slave hand) are isomorphic, and are driven by hydraulic servo, so that the mechanical arm can completely follow the movement of the main hand. The operator stands in the insulating bucket, and the communication between the main hand and the mechanical arm is only through optical fiber to ensure that the personnel are completely isolated from the high-voltage electric field, which greatly improves the safety of the operator's live operation.
机械臂安装在支承绝缘子上,并外包橡胶套袖,有效防止机械臂搭接两相造成相间短路;机械臂本体采用硬铝合金制造,提供腰部回转、大臂俯仰、小臂俯仰的运动、腕部俯仰、腕部摇摆、腕部旋转和平行手爪的等七个自由度运动。The mechanical arm is installed on the supporting insulator and covered with rubber sleeves, which can effectively prevent the phase-to-phase short circuit caused by the lapping of the two phases of the mechanical arm; There are seven degrees of freedom of movement such as head pitch, wrist swing, wrist rotation and parallel grip.
液压伺服控制盒安装于支承绝缘子支架上,位于机械臂腰部回转外侧,是机械臂的外部接口,为机械臂提供必要的电源、指令和测控信息。The hydraulic servo control box is installed on the supporting insulator bracket, and is located outside the waist rotation of the robotic arm. It is the external interface of the robotic arm and provides the necessary power supply, instructions, and measurement and control information for the robotic arm.
微控制器置于机器人作业平台侧面,提供主手控制和远程通信功能的系统;微控制器电源集成由锂电池、逆变器等组成,为主手操作提供可靠电源。The microcontroller is placed on the side of the robot operation platform to provide the main hand control and remote communication system; the microcontroller power supply integration is composed of lithium batteries, inverters, etc., to provide reliable power for the main hand operation.
终端控制盒是一个低功耗的,带液晶显示的控制盒,与主手通过RS232通信,用来显示系统信息和允许操作者选择操作功能。The terminal control box is a low power consumption control box with a liquid crystal display, which communicates with the main hand through RS232 to display system information and allow the operator to select operating functions.
机器人主从控制系统是通过以下方式实现:一名操作人员站在绝缘斗内,其左、右两手分别操控左主手和右主手(运动控制单元),左、右主手克服各关节力矩电机阻力作用相继联动;安装于左、右主手各关节的电位计将各关节轴发生旋转角度(位置指令)转化成电压信号到左、右微控制器;左、右微控制器将位置指令通过光纤传递信息给左、右机械臂液压伺服控制盒,液压伺服控制盒把信号转化为电压信号控制安装于左、右机械臂内部的伺服阀(电压信号控制油路流量的开关);伺服阀控制进入从手各关节的液压流量,驱动左、右机械臂的各关节运动,同时机械臂的电位计输出电压信号通过液压伺服控制盒反馈到微控制器内,与原通道电压比较,形成位置反馈,直到机械臂运动到与主手相应位置为止。The master-slave control system of the robot is realized in the following way: an operator stands in the insulating bucket, and his left and right hands respectively control the left main hand and the right main hand (motion control unit), and the left and right main hands overcome the torque of each joint The resistance of the motor is linked successively; the potentiometer installed on each joint of the left and right main hands converts the rotation angle (position command) of each joint axis into a voltage signal to the left and right microcontrollers; the left and right microcontrollers convert the position command The information is transmitted to the hydraulic servo control box of the left and right mechanical arms through the optical fiber, and the hydraulic servo control box converts the signal into a voltage signal to control the servo valve installed inside the left and right mechanical arms (the voltage signal controls the switch of the oil circuit flow); the servo valve Control the hydraulic flow entering the joints of the slave hand to drive the joints of the left and right manipulators to move. At the same time, the output voltage signal of the potentiometer of the manipulator is fed back to the microcontroller through the hydraulic servo control box, and compared with the original channel voltage to form a position Feedback until the mechanical arm moves to the position corresponding to the main hand.
本实用新型的有益效果是:根据10kV配电线路及以上高压线路带电作业工艺要求、作业环境特点,设计完成一种新型高压带电作业主从控制机器人作业平台。该作业平台在满足升降机构允许最大承受载荷前提下,从操作人员作业安全角度考虑,在有限空间内合理布局机器人作业平台各组成部分的位置关系,设定各部分可靠安全距离,实现全方位、立体式绝缘防护系统;该作业平台设计尺寸小,占用空间少,布置紧凑合理,切合高空作业现场实际,保证了人机交互空间与带电操作安全距离,既有效防止两机械臂本体运动发生干涉,又避免高空作业时触及导线或其他带电设备引发的人机伤亡,最大限度的保证操作人员的安全。The beneficial effects of the utility model are: according to the technical requirements of the 10kV distribution line and above high-voltage line live work process requirements and the characteristics of the work environment, a new type of high-voltage live work master-slave control robot work platform is designed and completed. Under the premise of satisfying the maximum allowable load of the lifting mechanism, the operating platform rationally arranges the positional relationship of each component of the robot operating platform in a limited space from the perspective of operator safety, and sets a reliable safety distance for each part to achieve all-round, Three-dimensional insulation protection system; the operation platform is designed to be small in size, takes up less space, and has a compact and reasonable layout, which is in line with the actual situation of the high-altitude operation site, and ensures the safe distance between the human-computer interaction space and the live operation. It also avoids human-machine casualties caused by touching wires or other live equipment when working at heights, and ensures the safety of operators to the greatest extent.
附图说明 Description of drawings
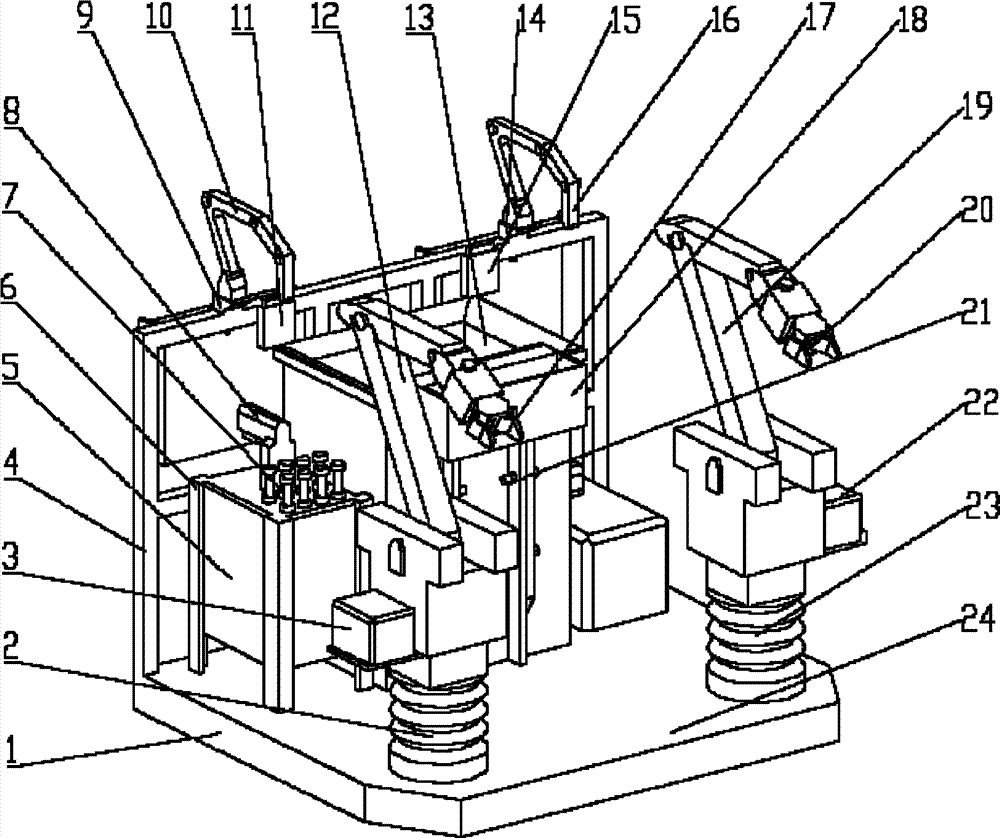
图1为本实用新型正面立体结构示意图;Fig. 1 is a schematic diagram of the front three-dimensional structure of the utility model;
图2为本实用新型背面立体结构示意图;Fig. 2 is a schematic diagram of the three-dimensional structure of the back of the utility model;
图3为本实用新型控制系统原理图;Fig. 3 is a schematic diagram of the utility model control system;
图中:1、机器人作业平台底架;2、右支承绝缘子;3、右液压伺服控制盒(RSD);4、机器人作业平台侧面连接架;5、液压升降平台控制集成;6、升降平台支承架;7、控制杆;8、操作柄;9、右主手支承架;10、右主手;11、右手终端控制盒;12、右机械臂;13、绝缘斗;14、左主手支承架;15、左手终端控制盒;16、左主手;17、右机械臂手爪;18、工具箱;19、左机械臂;20、左机械臂手爪;21、绝缘斗连接螺栓;22、左液压伺服控制盒(RSD);23、左支承绝缘子;24、平台环氧绝缘板外包;25、左微控制器连接架;26、左微控制器(KMC);27、右微控制器连接架;28、脚蹬;29、右微控制器;30、机器人作业平台侧面连接螺栓;31、微控制器电源集成。In the figure: 1. The chassis of the robot operation platform; 2. The right support insulator; 3. The right hydraulic servo control box (RSD); 4. The side connection frame of the robot operation platform; 5. The control integration of the hydraulic lifting platform; 6. The support of the lifting platform Frame; 7. Control lever; 8. Operating handle; 9. Right main hand support frame; 10. Right main hand; 11. Right hand terminal control box; 12. Right mechanical arm; 13. Insulation bucket; 14. Left main hand support Frame; 15. Left-hand terminal control box; 16. Left main hand; 17. Right mechanical arm claw; 18. Toolbox; 19. Left mechanical arm; 20. Left mechanical arm claw; 21. Insulation bucket connecting bolt; 22 , left hydraulic servo control box (RSD); 23, left support insulator; 24, platform epoxy insulation board outsourcing; 25, left micro-controller connection frame; 26, left micro-controller (KMC); 27, right micro-controller Connecting frame; 28, pedal; 29, right microcontroller; 30, connecting bolt on the side of robot operation platform; 31, microcontroller power supply integration.
具体实施方式 Detailed ways
下面结合附图和实施例对本实用新型新型进一步说明。Below in conjunction with accompanying drawing and embodiment the utility model is further described.
如图1-图3所示,本实用新型主要由机器人作业平台支承架、液压升降平台控制集成5、机器人操作系统和绝缘斗13组成,所述机器人作业平台支承架上分别设有液压升降平台控制集成5、机器人操作系统和绝缘斗13,液压升降平台控制集成5与机器人操作系统相连,液压升降平台控制集成5和机器人操作系统均设置于绝缘斗13外部。As shown in Figures 1-3, the utility model is mainly composed of a robot work platform support frame, a hydraulic lifting
其中,机器人作业平台支承架由机器人作业平台底架1和机器人作业平台侧面连接架4组成L形结构,机器人作业平台底架1为液压升降平台控制集成5、机器人操作系统和绝缘斗13提供可靠平台支承,机器人作业平台侧面连接架4留有螺栓孔,可机器人作业平台侧面连接螺栓30连接到斗臂车绝缘升降臂末端。机器人作业平台支承架为钢结构焊接,钢型材裸露表面均用环氧玻璃布缠绕,机器人作业平台底架1采用环氧绝缘板外包24,环氧树脂粘合而成,防止高空作业时平台接触导线造成相间短路。Among them, the support frame of the robot work platform is composed of the robot work platform chassis 1 and the robot work platform side connecting frame 4 to form an L-shaped structure. The robot work platform chassis 1 provides a reliable Platform support, the side connecting frame 4 of the robot operation platform has bolt holes, and the
液压升降平台控制集成5通过升降平台支承架6固定于机器人作业平台底架1上面右侧,操作人员站在绝缘斗13内,右手通过控制杆7和操作柄8,实现机器人作业平台的升、降及旋转运动。左、右两机械臂19、12的进、回油管都连接到液压升降平台控制集成5内,主从控制机器人运动所需的液压油源都来源于液压升降平台控制集成5内。绝缘斗13前部设有工具箱18和绝缘斗连接螺栓21,绝缘斗13侧面上设有脚蹬28。The hydraulic lifting
机器人操作系统根据操作人员左、右两手控制,分为左、右两套操作控制系统:每套控制系统都由左、右主手16、10,左、右机械臂19、12,左、右液压伺服控制盒22、3,左、右微控制器26、29,左、右手终端控制盒15、11和微控制器电源集成31组成。The robot operating system is divided into left and right two sets of operation control systems according to the left and right hands of the operator: each control system consists of left and right
右、左主手10、16分别通过右、左主手支承架9和14安装在机器人作业平台侧面连接架4顶部,根据传感器采集信息来操作机械臂运动。主手与机械臂(从手)是同构的,采用液压伺服驱动,机械臂可以完全跟随主手来运动。操作者站在绝缘斗13内,主手与机械臂之间仅通过光纤通讯,确保人员完全与高压电场隔离,极大提高了操作人员带电操作安全性。Right and left
右、左机械臂12、19分别安装在右、左支承绝缘子2、23上,位于机器人作业平台底架1前部两端,并外包橡胶套袖,有效防止机械臂触及导线及带电设备造成相间短路;机械臂本体采用硬铝合金制造,提供腰部回转、大臂俯仰、小臂俯仰的运动、腕部俯仰、腕部摇摆、腕部旋转和平行手爪的等七个自由度运动。右、左机械臂12、19前端分别设有右机械臂手爪17和左机械臂手爪20。The right and left
右、左液压伺服控制盒3、22分别安装于右、左支承绝缘子2、23支承架上,位于机械臂腰部回转外侧,是右、左机械臂12、19的外部接口,为机械臂提供必要的电源、指令和测控信息。Right and left hydraulic
左、右微控制器26、29分别通过左、右微控制器连接架25、27螺栓连接机器人作业平台侧面连接架4的外侧面,提供主手控制和远程通信功能的系统。微控制器通过光纤与液压伺服控制盒连接,从而完成主手与机械臂之间的通信连接。Left and
微控制器电源集成31由锂电池、逆变器等组成,为右、左主手10、16提供可靠电源。Microcontroller
右、左手终端控制盒11、15是一个低功耗的,带液晶显示的控制盒,安装于机器人作业平台侧面连接架4的内侧面、绝缘斗13上侧。右、左手终端控制盒11、15分别与右、左主手10、16通过RS232通信,用来显示系统诊断信息和允许操作者选择操作功能。The right and left hand
机器人主从控制系统是通过以下方式实现:操作人员站在绝缘斗13内,其左、右两手分别操控左主手16和右主手10(运动控制单元),左、右主手16、10克服各关节力矩电机阻力作用相继联动;安装于左、右主手各关节的电位计将各关节轴发生旋转角度(位置指令)转化成电压信号到左、右微控制器26、29;左、右微控制器26、29将位置指令通过光纤传递信息给左、右液压伺服控制盒22、3,液压伺服控制盒把信号转化为电压信号控制安装于左、右机械臂内部的伺服阀(电压信号控制油路流量的开关);伺服阀控制进入从手各关节的液压流量,驱动左、右机械臂的各关节运动,同时机械臂的电位计输出电压信号通过液压伺服控制盒反馈到微控制器内,与原通道电压比较,形成位置反馈,直到机械臂运动到与主手相应位置为止。The master-slave control system of the robot is realized in the following way: the operator stands in the insulating
上述虽然结合附图对实用新型的具体实施方式进行了描述,但并非对本实用新型保护范围的限制,所属领域技术人员应该明白,在本实用新型的技术方案的基础上,本领域技术人员不需要付出创造性劳动即可做出的各种修改或变形仍在本实用新型的保护范围以内。Although the specific implementation of the utility model has been described above in conjunction with the accompanying drawings, it does not limit the protection scope of the utility model. Those skilled in the art should understand that on the basis of the technical solution of the utility model, those skilled in the art do not need to Various modifications or deformations that can be made with creative efforts are still within the protection scope of the present utility model.
Claims (7)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2012201380061U CN202491237U (en) | 2012-04-01 | 2012-04-01 | Master-slave control robot work platform for high-pressure hot-line work |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2012201380061U CN202491237U (en) | 2012-04-01 | 2012-04-01 | Master-slave control robot work platform for high-pressure hot-line work |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN202491237U true CN202491237U (en) | 2012-10-17 |
Family
ID=46997477
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2012201380061U Expired - Lifetime CN202491237U (en) | 2012-04-01 | 2012-04-01 | Master-slave control robot work platform for high-pressure hot-line work |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN202491237U (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102615637A (en) * | 2012-04-01 | 2012-08-01 | 山东电力研究院 | Master-slave control robot work platform for high-voltage live working |
| CN104354152A (en) * | 2014-11-04 | 2015-02-18 | 国家电网公司 | Robot multiple-insulation protection system under complex line environment |
-
2012
- 2012-04-01 CN CN2012201380061U patent/CN202491237U/en not_active Expired - Lifetime
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102615637A (en) * | 2012-04-01 | 2012-08-01 | 山东电力研究院 | Master-slave control robot work platform for high-voltage live working |
| CN102615637B (en) * | 2012-04-01 | 2014-08-27 | 山东电力研究院 | Master-slave control robot work platform for high-voltage live working |
| CN104354152A (en) * | 2014-11-04 | 2015-02-18 | 国家电网公司 | Robot multiple-insulation protection system under complex line environment |
| CN104354152B (en) * | 2014-11-04 | 2016-03-09 | 国家电网公司 | Robot multi-insulation guard system under a kind of complicated line environment |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102615637B (en) | Master-slave control robot work platform for high-voltage live working | |
| CN102601782B (en) | High-voltage live working robot device | |
| CN202556399U (en) | High-voltage live-working robot device | |
| CN103056866B (en) | Transformer station's hot line robot | |
| CN203092545U (en) | Transformer station live working robot | |
| CN106426298B (en) | A multi-level insulation protection system for a live working robot | |
| CN107650124A (en) | A kind of robot for high-voltage hot-line work aerial work platform and its method for unloading gold utensil screw | |
| CN201808061U (en) | Insulation system for high-voltage live-working robots | |
| CN108616077B (en) | A method for disconnecting lead wires of a live working robot | |
| CN107053188A (en) | A kind of hot line robot branch connects gage lap method | |
| CN106786140B (en) | A kind of hot line robot strain insulator replacing options | |
| CN105014651B (en) | Living water washing robot of transformer station and method | |
| CN103111996A (en) | Converting station hot-line work robot insulation protection system | |
| CN105014674A (en) | Convertor station live washing robot system and method | |
| CN106826756A (en) | A kind of conducting wire mending method based on robot for high-voltage hot-line work | |
| CN109318204A (en) | An intelligent control system for a dual-arm robot for live work | |
| CN104998848A (en) | Electrification water washing robot of rail type transformer substation | |
| CN102152292A (en) | Manipulator of high-altitude live working vehicle | |
| CN206982675U (en) | Transformer station's cubicle switch cabinet protection definite value change operation robot | |
| CN104999449B (en) | Electrified water washing robot of wheel type substation | |
| CN204171000U (en) | For the living water washing robot of transformer station of low latitude insulator | |
| CN104325454B (en) | Live working robot platform for complex line environment | |
| CN202491237U (en) | Master-slave control robot work platform for high-pressure hot-line work | |
| CN105743018A (en) | A method of using a CO2 laser cable peeling device to perform 10kV live wire connection work | |
| CN204278028U (en) | Current conversion station living water washing robot system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| ASS | Succession or assignment of patent right |
Owner name: STATE ELECTRIC NET CROP. Effective date: 20121031 |
|
| C41 | Transfer of patent application or patent right or utility model | ||
| TR01 | Transfer of patent right |
Effective date of registration: 20121031 Address after: 250002 Ji'nan City Central District, Shandong, No. 2 South Road, No. 500 Patentee after: Shandong Research Inst. of Electric Power Patentee after: State Grid Corporation of China Address before: 250002 Ji'nan City Central District, Shandong, No. 2 South Road, No. 500 Patentee before: Shandong Research Inst. of Electric Power |
|
| CP01 | Change in the name or title of a patent holder |
Address after: 250002 Ji'nan City Central District, Shandong, No. 2 South Road, No. 500 Co-patentee after: State Grid Corporation of China Patentee after: Shandong Research Inst. of Electric Power Address before: 250002 Ji'nan City Central District, Shandong, No. 2 South Road, No. 500 Co-patentee before: State Grid Corporation of China Patentee before: Shandong Research Inst. of Electric Power |
|
| CP01 | Change in the name or title of a patent holder | ||
| EE01 | Entry into force of recordation of patent licensing contract | ||
| EE01 | Entry into force of recordation of patent licensing contract |
Assignee: National Network Intelligent Technology Co., Ltd. Assignor: Shandong Research Inst. of Electric Power Contract record no.: X2019370000007 Denomination of utility model: Master-slave control robot work platform for high-voltage live working Granted publication date: 20121017 License type: Exclusive License Record date: 20191014 |
|
| TR01 | Transfer of patent right |
Effective date of registration: 20201027 Address after: 250101 Electric Power Intelligent Robot Production Project 101 in Jinan City, Shandong Province, South of Feiyue Avenue and East of No. 26 Road (ICT Industrial Park) Patentee after: National Network Intelligent Technology Co.,Ltd. Address before: 250002 Ji'nan City Central District, Shandong, No. 2 South Road, No. 500 Patentee before: Shandong Electric Power Research Institute Patentee before: STATE GRID CORPORATION OF CHINA |
|
| TR01 | Transfer of patent right | ||
| EC01 | Cancellation of recordation of patent licensing contract |
Assignee: National Network Intelligent Technology Co.,Ltd. Assignor: Shandong Electric Power Research Institute Contract record no.: X2019370000007 Date of cancellation: 20210324 |
|
| EC01 | Cancellation of recordation of patent licensing contract | ||
| CX01 | Expiry of patent term |
Granted publication date: 20121017 |
|
| CX01 | Expiry of patent term |