CN115576082B - 用于极端照度环境的远距离大幅宽成像系统 - Google Patents
用于极端照度环境的远距离大幅宽成像系统 Download PDFInfo
- Publication number
- CN115576082B CN115576082B CN202211570898.7A CN202211570898A CN115576082B CN 115576082 B CN115576082 B CN 115576082B CN 202211570898 A CN202211570898 A CN 202211570898A CN 115576082 B CN115576082 B CN 115576082B
- Authority
- CN
- China
- Prior art keywords
- prism
- light
- lens
- group
- mounting flange
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000003384 imaging method Methods 0.000 title claims abstract description 89
- 238000005286 illumination Methods 0.000 title claims description 19
- 230000003287 optical effect Effects 0.000 claims description 70
- 239000000758 substrate Substances 0.000 claims description 22
- 230000000712 assembly Effects 0.000 claims description 12
- 238000000429 assembly Methods 0.000 claims description 12
- 230000000903 blocking effect Effects 0.000 claims description 6
- 230000003014 reinforcing effect Effects 0.000 claims description 5
- 239000000853 adhesive Substances 0.000 claims description 3
- 230000001070 adhesive effect Effects 0.000 claims description 3
- 238000012538 light obscuration Methods 0.000 claims 2
- 238000000034 method Methods 0.000 abstract description 14
- 230000004297 night vision Effects 0.000 abstract description 9
- 238000005516 engineering process Methods 0.000 abstract description 8
- 230000008033 biological extinction Effects 0.000 description 11
- 230000008569 process Effects 0.000 description 7
- 238000005192 partition Methods 0.000 description 4
- 230000004888 barrier function Effects 0.000 description 3
- 230000009286 beneficial effect Effects 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- PEDCQBHIVMGVHV-UHFFFAOYSA-N Glycerine Chemical compound OCC(O)CO PEDCQBHIVMGVHV-UHFFFAOYSA-N 0.000 description 2
- 230000009471 action Effects 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 238000001514 detection method Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 238000003702 image correction Methods 0.000 description 2
- 230000005764 inhibitory process Effects 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 238000012544 monitoring process Methods 0.000 description 2
- 239000000523 sample Substances 0.000 description 2
- 238000001931 thermography Methods 0.000 description 2
- 229910000838 Al alloy Inorganic materials 0.000 description 1
- 239000000956 alloy Substances 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 230000008094 contradictory effect Effects 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 230000008030 elimination Effects 0.000 description 1
- 238000003379 elimination reaction Methods 0.000 description 1
- 230000004907 flux Effects 0.000 description 1
- 230000004927 fusion Effects 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 230000002401 inhibitory effect Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 238000002310 reflectometry Methods 0.000 description 1
- 230000002787 reinforcement Effects 0.000 description 1
- 238000005488 sandblasting Methods 0.000 description 1
- 238000012795 verification Methods 0.000 description 1
Images





Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B13/00—Optical objectives specially designed for the purposes specified below
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B13/00—Optical objectives specially designed for the purposes specified below
- G02B13/06—Panoramic objectives; So-called "sky lenses" including panoramic objectives having reflecting surfaces
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/02—Mountings, adjusting means, or light-tight connections, for optical elements for lenses
- G02B7/021—Mountings, adjusting means, or light-tight connections, for optical elements for lenses for more than one lens
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Lenses (AREA)
Abstract
本发明属于一种成像系统,为解决目前微光夜视成像技术中,镜头尺寸和重量过大,且常规的视场拼接方法无法兼容高性能与轻小型化的技术问题,提供一种用于极端照度环境的远距离大幅宽成像系统,棱镜组采用六个棱镜按照两排排布,并在第二棱镜和第三棱镜之间形成第一通光区,在第二排与第一棱镜相对应位置处形成第二通光区,配合六个棱镜反光面和两个通光区的排布方式,使由微光成像镜头入射的光路被分割为八路,对应被八个探测器组件接收,再经过视场拼接实现大幅宽成像,能够实现目标远距离探测以及大视场宽幅成像,且视场的拼接主要取决于棱镜组的设置和排布,减少了对算法软件的依赖。
Description
技术领域
本发明属于一种成像系统,具体涉及一种用于极端照度环境的远距离大幅宽成像系统。
背景技术
在自然条件且无人为光照干扰的环境中,晴天满月的夜间地面照度约为0.1lux,晴天无月而只有微弱星光的地面照度约为0.01lux。在极低照度环境中,光学系统能够采集到的目标能量极弱,大部分细节信息被淹没在背景中,系统作用距离受限。能够适应极端照度环境的夜视技术主要分为两类:微光夜视成像技术与红外热成像技术。其中,红外热成像技术受制于探测器,探测器的分辨率低,探测范围小且造价昂贵,往往用于点目标的探测与跟踪。而微光夜视成像技术的探测器面阵规模较大,分辨率相对较高,但是,传统的微光夜视成像系统作用距离较短,主要用于单兵揭伪和安防监视,无法实现远距离大幅宽的快速成像,限制了其在航空侦察领域的应用。
在微光夜视成像技术中,为了提高微光成像系统在极端照度环境下的成像能力,最有效的办法是增大光学镜头的相对孔径,提高系统获取的目标能量。然而,若要系统同时具备远距离成像能力,还需增加镜头焦距,提高放大倍率。但是,光学镜头的大相对孔径和长焦距往往是矛盾的,同时增大相对孔径和焦距会导致镜头尺寸和重量过大。另外,大尺寸光学透镜难以加工,成品率低,导致镜头的装调难度大幅上升。
同时,为了提升微光成像系统的信息获取效率,实现单幅图像的大收容宽度,需要探测器具有4K×4K分辨率规模。而目前相对成熟的可用于微光成像的探测器分辨率仅为1080P,因此,一般需要八路探测器按4×2形式排布进行视场拼接。该视场拼接的常规做法,是为单个镜头匹配单个探测器再集成为单机,各单机呈一定角度排布,分别获取不同视场内的目标,再通过图像拼接算法实现大视场融合。该方法对各单机的状态一致性和均匀性要求较高,更多依赖于算法软件进行图像的校正和拼接,另外,系统集成后规模庞大,无法兼容高性能与轻小型化。
在现有技术中,如公开号为CN113933977A的中国专利申请中,公开了一种4k高清日夜共焦微光镜头,该镜头是一款2.8mm微光级,红外完全共焦、4k高清光学镜头,能够同时满足大光圈、4K高清、红外共焦的要求,还可以把成本做到较为经济。但是,该镜头的焦距为2.8mm,只能用于近距离的监视和观测,无法实现远距离的宽幅成像。同时,该镜头匹配4K探测器,即4096×2160像素的分辨率,其规模仅为4K×4K探测器的一半。在公开号为CN111308665A的中国专利中,公开了一种大口径大光圈超长焦微光成像镜头的光学设计方法,该发明中镜头拥有大光圈和大进光量,微光夜视成像镜头效果清晰锐利,光学镜头的焦距f=300mm,可在50m以上的工作距离中工作,但其分辨率仅为1080P,无法提供超大幅宽的高分辨率影像。在公开号为CN112492154A的中国专利中公开了一种应用于空间相机的高精度、高热稳定性光学拼接焦面。其通过90°的L型结构基板,一侧安装有多个分光镜组件,另一侧通过固定座组件安装有多个图像传感器实现光学拼接;具体实施中,基板L型结构长边呈一字型排列固连有三个图像传感器,L型结构短边呈一字型排列固连有两个图像传感器;该结构形式只能实现一字型排列的多探测器拼接,拼接完成后图像呈长条状,无法实现多行多列的光学拼接。同时,L型结构基板呈开放式,不利于光学系统中杂光的抑制,影响高灵敏度的微光成像系统性能。
发明内容
本发明为解决目前微光夜视成像技术中,为了提高微光成像系统在极端照度环境下的成像能力,需要同时增大相对孔径和焦距,导致镜头尺寸和重量过大,装调难度大幅上升,且为了提升微光成像系统的信息获取效率,常规的视场拼接方法更多依赖于算法软件进行图像的校正和拼接,无法兼容高性能与轻小型化的技术问题,提供一种用于极端照度环境的远距离大幅宽成像系统。
为达到上述目的,本发明采用以下技术方案予以实现:
一种用于极端照度环境的远距离大幅宽成像系统,其特殊之处在于,包括沿光路依次设置的微光成像镜头、主法兰、主基板和光学视场拼接组件;所述微光成像镜头和主基板通过主法兰相连;
所述光学视场拼接组件包括安装架,以及连接在安装架上的棱镜组、八个探测器组件;在三维直角坐标系中定义由微光成像镜头入射的光路方向为X轴正方向;所述棱镜组包括按照两排布置的第一棱镜、第二棱镜、第三棱镜、第四棱镜、第五棱镜和第六棱镜,且朝向微光成像镜头入射光路的面为各棱镜的反光面;第一棱镜、第二棱镜、第三棱镜位于第一排,第一棱镜和第二棱镜紧贴设置,第二棱镜和第三棱镜之间留有间隙,形成第一通光区,第四棱镜、第五棱镜和第六棱镜位于第二排,且依次紧贴设置;第二棱镜和第四棱镜对应紧贴设置且尺寸相同,第三棱镜和第六棱镜对应紧贴设置且尺寸相同,第五棱镜位于第一通光区相对应位置处,第二排与第一棱镜相对应位置处形成第二通光区;第二棱镜和第三棱镜的反射光轴沿Y轴正方向,第四棱镜和第六棱镜的反射光轴沿Y轴负方向,第一棱镜的反射光轴沿Z轴负方向,第五棱镜的反射光轴沿Z轴正方向;八个所述探测器组件的接收面分别朝向棱镜组中六个棱镜的反光面和两个通光区。
进一步地,所述微光成像镜头包括沿光轴依次设置的前镜组、可变光阑组件、后镜组和调焦镜组;
所述前镜组包括前镜筒和安装在前镜筒内的前透镜组,前镜筒的内径沿光路呈阶梯状逐渐减小;
所述后镜组包括后镜筒和安装在后镜筒内的后透镜组和消光环,后镜筒沿光路呈阶梯状逐渐增大,消光环位于后镜筒最后端;
所述调焦镜组包括驱动组件、调焦镜筒和安装在调焦镜筒内的调焦透镜,驱动组件安装在调焦镜筒后端,驱动组件的输出端与调焦透镜相连,用于通过驱动组件驱动调焦透镜在调焦镜筒内沿光轴往复运动;
所述前镜筒的后端与后镜筒的前端相连,后镜筒的后端与调焦镜筒的前端相连;所述调焦镜筒后端与主法兰相连;所述可变光阑组件位于前镜筒和后镜筒之间;主法兰与后镜筒相连,且套设于调焦镜筒和驱动组件外部。
进一步地,还包括遮光罩;
所述遮光罩呈喇叭状,遮光罩的小端与前镜筒前端相连;
所述遮光罩内安装有挡光环。
进一步地,所述前镜筒后端设有第一安装法兰,后镜筒前端设有第二安装法兰,后端设有第三安装法兰,前镜筒和后镜筒通过第一安装法兰和第二安装法兰相连,可变光阑组件位于第一安装法兰和第二安装法兰内;后镜筒通过第三安装法兰与调焦镜筒相连;第三安装法兰通过主法兰与主基板连接;
所述前镜筒外侧壁和第一安装法兰之间、所述第二安装法兰和第三安装法兰之间均设有加强筋。
进一步地,所述棱镜组中的六个棱镜之间通过光敏胶紧贴,且非反光面均为涂黑处理的表面。
进一步地,所述探测器组件的分辨率为1080P,像元尺寸为13μm。
进一步地,所述安装架包括支架和主框架;
所述棱镜组中的各棱镜均通过棱镜座安装在支架内,支架安装在主基板后端面上;
所述主框架套设于支架外部,八个所述探测器组件均安装在主框架上。
进一步地,所述探测器组件与主框架之间设有调节垫片;
所述探测器组件与主框架通过定位销钉相连。
进一步地,所述可变光阑组件的通光口径大小在0至100mm之间连续可变。
与现有技术相比,本发明具有以下有益效果:
1.本发明提出了一种用于极端照度环境的远距离大幅宽成像系统,其中的光学视场拼接组件中,棱镜组采用六个棱镜按照两排排布,并在第二棱镜和第三棱镜之间形成第一通光区,在第二排与第一棱镜相对应位置处,即第四棱镜前方形成第二通光区,使六个棱镜、第一通光区和第二通光区整体形成两排4列的排布,配合六个棱镜反光面和两个通光区的排布方式,使由微光成像镜头入射的光路能够被分割为八路,对应被八个探测器组件接收,再经过视场拼接实现大幅宽成像,能够实现4K×4K的有效分辨率。经验证,在0.01lux照度环境中获取的图像对比度高,目标清晰锐利,同时,能够实现目标远距离探测以及大视场宽幅成像。不需要增大镜头的尺寸和重量,且视场的拼接主要取决于棱镜组的设置和排布,减少了对算法软件的依赖。
2.本发明中的微光成像镜头优化了结构设置,并安装了消光环,通光量大,放大倍率高,有助于达到较好的成像效果。
3.本发明中设置遮光罩和消光环,对成像光路内部及外部均进行了消杂光处理,具有较高的杂光抑制能力,能够有效提升极端照度环境的适应性。
4.本发明中前镜筒外侧壁和第一安装法兰之间、第二安装法兰和第三安装法兰之间均设有加强筋,能够有效提升微光成像镜头的整体结构强度。
5.本发明中探测器组件和主框架之间设有调节垫片,通过修研能够便捷实现探测器组件靶面位置与光学焦面位置的重合。
附图说明
图1为本发明用于极端照度环境的远距离大幅宽成像系统实施例的爆炸示意图;
图2为本发明实施例中微光成像镜头的剖视示意图;
图3为本发明用于极端照度环境的远距离大幅宽成像系统装配时前镜筒后端面上安装定心法兰的示意图;
图4为本发明用于极端照度环境的远距离大幅宽成像系统装配时后镜筒前端面和后端面紧贴固连定心工装法兰的示意图;
图5为本发明实施例中光学视场拼接组件的爆炸示意图;
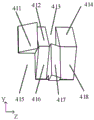
图6为本发明实施例中棱镜组的示意图。
其中:1-微光成像镜头、11-遮光罩、111-挡光环、12-前镜组、121-前镜筒、1211-定心法兰、1212-切断面、122-前透镜组、123-第一安装法兰、13-可变光阑组件、14-后镜组、141-后镜筒、1411-定心工装法兰、1412-分划板组件、142-后透镜组、143-消光环、144-第二安装法兰、145-第三安装法兰、15-调焦镜组、151-调焦镜筒、152-调焦透镜、153-驱动组件、2-主法兰、3-主基板、4-光学视场拼接组件、41-棱镜组、411-第一棱镜、412-第二棱镜、413-第一通光区、414-第三棱镜、415-第二通光区、416-第四棱镜、417-第五棱镜、418-第六棱镜、42-棱镜座、43-支架、44-挡光板、45-主框架、46-探测器组件、47-调节垫片、48-定位销钉、5-加强筋。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
如图1所示,本发明为了实现用于极端照度环境的远距离大幅宽成像,搭建了用于极端照度环境的远距离大幅宽成像系统,如下是该成像系统的一个具体实施例:包括沿光路依次设置的微光成像镜头1、主法兰2、主基板3和光学视场拼接组件4。其中,微光成像镜头1一般采用大相对孔径和长焦距的透射式光学镜头,其光学系统F数为1.6~20,可变,焦距为131mm,视场角可达到24°×24°,因此,该微光成像镜头1的通光量大,放大倍率高,能够在0.01lux照度环境中对5公里外目标进行高分辨率成像。
如图2至图4所示,具体的,微光成像镜头1包括沿光轴依次设置的遮光罩11、前镜组12、可变光阑组件13、后镜组14和调焦镜组15。遮光罩11位于整个成像系统的最前端,呈喇叭状,大端朝向前端,遮光罩11内部沿其轴向等间距布置挡光环111,挡光环111内孔与视场光线边缘贴合,用于抑制视场外杂光。前镜组12包括前镜筒121和前透镜组122,前透镜组122安装于前镜筒121内,遮光罩11的小端安装于前镜筒121的前端。前镜筒121的前端内径大于后端内径,从前镜筒121的前端至后端,呈阶梯状逐渐减小。在本发明的一个实施例中,前透镜组122包括五组光学透镜,五组光学透镜中,位于前镜筒121前端的光学透镜外径尺寸最大,等于132mm,其他四组光学透镜的外径尺寸从前镜筒121前端至后端依次减小,五组光学透镜分别通过其各自的外圆与前镜筒121对应处内圆配合,依次安装于前镜筒121内部。前镜筒121后端设置有第一安装法兰123,第一安装法兰123和前镜筒121之间通过加强筋5进行加固。
后镜组14包括后镜筒141、后透镜组142和消光环143,后透镜组142和消光环143均安装于后镜筒141内,后透镜组142位于消光环143前端,后透镜组142和消光环143外圆分别与后镜筒141内圆配合。后镜组14中的后镜筒141通过第二安装法兰144和前镜筒121后端的第一安装法兰123相连。后镜筒141的前端内径小于后端内径,且从前端至后端呈阶梯状增大。作为本发明的一个具体实施例,后透镜组142包括四组光学透镜,四组光学透镜的最小外径尺寸为66mm,并沿光路依次增大。消光环143的内孔侧壁设置有0.35mm高度的消光纹,并与视场光线边缘贴合。后镜筒141后端设置有第三安装法兰145,在后镜筒141前端的第二安装法兰144和后端的第三安装法兰145之间设有用于加固的加强筋5。另外,前镜组12和后镜组14之间还设置有用于调整进光量的可变光阑组件13,可变光阑组件13位于第一安装法兰123和第二安装法兰144内。采用的可变光阑组件13的通光口径大小连续可变,最小为零,最大为100mm。调焦镜组15位于微光成像镜头1的后部,包括调焦镜筒151、调焦透镜152和驱动组件153,调焦镜筒151与第三安装法兰145相连,后镜筒141通过第三安装法兰145与主法兰2相连,主法兰2套设于调焦镜筒151和驱动组件153外部。调焦透镜152安装在调焦镜筒151内部,调焦透镜152外圆与调焦镜筒151内圆相互配合形成滑动副,驱动组件153安装在调焦镜筒151后端,驱动组件153的输出端与调焦透镜152相连,用于驱动调焦透镜152在调焦镜筒151内部沿轴向直线移动,用于补偿因温度变化带来的离焦。具体的,驱动组件153的结构形式可采用现有光学结构中调焦用的驱动组件结构。
主法兰2用于连接微光成像镜头1与主基板3。光学视场拼接组件4安装于主基板3上,且位于主基板3后方。如图5所示,光学视场拼接组件4包括棱镜组41、棱镜座42、支架43、挡光板44、主框架45、高灵敏度的探测器组件46、调节垫片47和定位销钉48。其中,探测器组件46、调节垫片47、定位销钉48均为八组,棱镜组41为六拼八分的棱镜组。光学视场拼接组件4用于将微光成像镜头1的出射光路分割为八路。微光成像镜头1的出射光路经过棱镜组41,被分割为8路光路并投射至位于主框架45的五个方向的八组高灵敏度的探测器组件46上,再经过视场拼接实现大幅宽成像。如图6所示棱镜组41具体包括六个棱镜,分别为第一棱镜411、第二棱镜412、第三棱镜414、第四棱镜416、第五棱镜417和第六棱镜418,在三维直角坐标系中定义由微光成像镜头1入射的光路方向为X轴正方向。
六个棱镜按照两排布置,其中,第一棱镜411、第二棱镜412、第三棱镜414位于第一排,第一棱镜411和第二棱镜412紧贴设置,第二棱镜412和第三棱镜414之间留有间隙,形成第一通光区413,第四棱镜416、第五棱镜417和第六棱镜418位于第二排,且依次紧贴设置。第二棱镜412和第四棱镜416位于两排沿Y轴方向的相对应位置且尺寸相同,第三棱镜414和第六棱镜418位于两排沿Y轴方向的相对应位置且尺寸相同,第五棱镜417位于第一通光区413相对应位置处,第二排与第一棱镜411相对应位置处形成第二通光区415。
第一棱镜411、第二棱镜412、第三棱镜414、第四棱镜416、第五棱镜417和第六棱镜418朝向微光成像镜头1入射光路的面为各棱镜的反光面。第二棱镜412和第三棱镜414的反射光轴沿Y轴正方向,第四棱镜416和第六棱镜418的反射光轴沿Y轴负方向,第一棱镜411的反射光轴沿Z轴负方向,第五棱镜417的反射光轴沿Z轴正方向。第一通光区413和第二通光区415均能够使微光成像镜头1入射光路的光直接透过。
整体上,第一棱镜411、第二棱镜412、第三棱镜414、第四棱镜416、第五棱镜417、第六棱镜418、第一通光区413和第二通光区415形成4列*2行排布,此处的“行”与前述的六个棱镜按照两排布置中的“排”相对应。六个棱镜的反光面与光轴夹角均为45°,棱镜组41沿微光成像镜头1入射光路的光轴方向的投影面为长方形,长方形的中心位于微光成像镜头1入射光路的光轴上。棱镜组41在整个成像系统中,位于微光成像镜头1后端面与焦面之间任意位置,其长方形投影面应当能够覆盖整个光路。六个棱镜之间通过光敏胶粘连,其反光面具有高反射率,非反光面涂黑,能够抑制杂光。棱镜组41再通过粘连工艺固定于棱镜座42内。棱镜座42与支架43通过螺钉固连,使棱镜组41位于支架43内部,本实施例中,支架43整体呈立方体状框架,且靠近主法兰2的表面镂空与主法兰2中心开孔一致,使支架43和主基板3通过支架43镂空外圆与主基板3中心开孔内圆配合进行连接。挡光板44安装在支架43上,用于消除经棱镜组41分割的八路光路之间相互的影响,可根据光学杂散光分析结果进行设置,在本实施例中设置两个挡光板44,一个位于第一通光区413相应位置,另一个位于第五棱镜417相应位置。主框架45套设于支架43外部,整体呈立方体状且朝向主法兰2的表面整体开口设置,在其他5个表面上分别开设通光孔,共开设八个通光孔,且除去通光孔为全封闭结构,能够消除外界杂光干扰。八组高灵敏度的探测器组件46分布于主框架45外侧五个方向上,分别安装在八个通光孔处,用于接收棱镜组41中六个棱镜反射和两个通光区透过的光,相应的八个探测器组件46分别与六个棱镜的反光面和两个通光区相对设置。在本发明的本实施例中,八组探测器组件46的分辨率均为1080P,像元尺寸均为13μm。每组调节垫片47分别安装在各探测器组件46和主框架45之间,每组调节垫片47共包括四个位于探测器组件46四个边角处到的小垫片,通过修研高度,能够保证探测器组件46靶面位置与光学焦面位置重合。每组定位销钉48分别包括两个直径2.5的销钉,用于通过两个销钉连接探测器组件46和主框架45,锁定探测器组件46的横向和竖向位置,并便于重复拆卸。
探测器组件46接收八路光路后,通过视场拼接,能够实现4K×4K的有效分辨率。其中,如何进行视场拼接,可借助相应的现有视场拼接软件或相应的视场拼接方法,并非本发明的主要发明点。本发明的成像系统经验证,在成像距离5公里处,单幅图像的幅宽能够达到2公里×2公里,对于拓宽航空侦察工作时间窗口,提升信息获取能力都具有重要意义。
在本发明的其他实施例中,支架43和主框架45的形状、连接关系也可采用其他形式,组成具体的安装架结构,另外,棱镜组41中的各棱镜通过棱镜座42安装在安装架的支架43上,也是本发明实施例的一种,只要能保证棱镜组41、探测器组件46的安装稳定性,以及棱镜组41和探测器组件46的位置关系即可。
另外,作为一种优选方案,本发明用于极端照度环境的远距离大幅宽成像系统中,采用的结构零件均为2A12-T4铝合金材料经加工制作,再进行表面喷砂,哑光黑化处理得到。
上述用于极端照度环境的远距离大幅宽成像系统中,可具体采用下述方法装调,保证整个成像系统的成像效果:
1.如图3,前镜筒121的后端留有定心法兰1211,将前镜筒121通过定心法兰1211连接于定心车床上,定心法兰1211设置在前镜筒121的后端面上。根据预设要求,二次精车削前镜筒121所有内圆尺寸,包括前透镜组122中各透镜在前镜筒121内安装处的内圆尺寸,以及与后镜筒141配合的外圆尺寸至标准尺寸,同时,保证前镜筒121内圆和外圆的同轴度。二次精车削完成后,将定心法兰1211沿切断面1212切断,切断面1212位于前镜筒121后端面与定心法兰1211前端面贴合处。前透镜组122外圆均通过光学定心工艺与前镜筒121内圆配作,且间隙小于等于0.008mm,用于保证前透镜组122各光学透镜光轴的偏心小于0.01mm,倾斜小于20″。
2.如图4所示,将后镜筒141通过分划板组件1412和定心工装法兰1411进行辅助装调。第一步,将定心工装法兰1411与后镜筒141前端面紧贴固连,并安装于定心车床上。二次精车削后镜筒141所有内圆尺寸及与调焦镜筒151配合的外圆尺寸至标准尺寸,此处,后镜筒141所有内圆尺寸包括后透镜组142中各透镜在后镜筒141内安装处的内圆尺寸,同时,保证后镜筒141内外圆的同轴度。第二步,将分划板组件1412外圆通过光学定心工艺与后镜筒141内圆配作,并安装于后镜筒141内。第三步,将后镜筒141从定心车床上拆下,拆下定心工装法兰1411并调转方向,使后镜筒141后端面与定心工装法兰1411紧贴固连,并安装于定心车床上,通过光学定心工艺方法找准分划板组件1412的轴心,并以此轴心为基准,二次精车削后镜筒141与前镜筒121配合的内圆尺寸,保证配合间隙不大于0.008mm,拆除分划板组件1412。第四步,将后透镜组142外圆均通过光学定心工艺与后镜筒内圆141配作,使配作间隙小于等于0.008mm。通过此步骤2能够保证各后透镜组142光轴偏心小于0.01mm,倾斜小于20″,同时,保证前镜组12和后镜组14整体光轴偏心小于0.01mm,倾斜小于20″。
3.将调焦镜筒151连接于定心车床上,二次精车削调焦镜筒151所有内圆尺寸,保证调焦镜筒151各处内圆同轴度。配作调焦镜筒151与后镜筒141后端外圆配合的内圆尺寸,保证配合间隙小于等于0.008mm。将调焦透镜152外圆通过光学定心工艺与调焦镜筒151内圆配作,保证配合间隙小于等于0.015mm,并且能够运动流畅。通过此步骤能够保证调焦镜组15与后镜组14整体的光轴偏心小于0.01mm,倾斜小于30″。
4.将遮光罩11、前镜组12、可变光阑组件13、后镜组14和调焦镜组15依次安装完毕。按照上述步骤能够实现微光成像镜头1所有光学元件的光轴偏心小于0.01mm,倾斜小于30″,且各配合面重复定位精度高,连接关系可靠,重复拆卸不影响其光轴的偏心和倾斜精度。
5.在微光成像镜头1后端通过主法兰2安装主基板3,再在主基板3的后端同轴安装光学视场拼接组件4,使光学视场拼接组件4的主框架45安装在主基板3上,完成整个成像系统的装配。
以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
Claims (8)
1.一种用于极端照度环境的远距离大幅宽成像系统,其特征在于:包括沿光路依次设置的微光成像镜头(1)、主法兰(2)、主基板(3)和光学视场拼接组件(4);所述微光成像镜头(1)和主基板(3)通过主法兰(2)相连;
所述光学视场拼接组件(4)包括安装架,以及连接在安装架上的棱镜组(41)、八个探测器组件(46);在三维直角坐标系中定义由微光成像镜头(1)入射的光路方向为X轴正方向;所述棱镜组(41)包括按照两排布置的第一棱镜(411)、第二棱镜(412)、第三棱镜(414)、第四棱镜(416)、第五棱镜(417)和第六棱镜(418),且朝向微光成像镜头(1)入射光路的面为各棱镜的反光面;第一棱镜(411)、第二棱镜(412)、第三棱镜(414)位于第一排,第一棱镜(411)和第二棱镜(412)紧贴设置,第二棱镜(412)和第三棱镜(414)之间留有间隙,形成第一通光区(413),第四棱镜(416)、第五棱镜(417)和第六棱镜(418)位于第二排,且依次紧贴设置;第二棱镜(412)和第四棱镜(416)对应紧贴设置且尺寸相同,第三棱镜(414)和第六棱镜(418)对应紧贴设置且尺寸相同,第五棱镜(417)位于第一通光区(413)相对应位置处,第二排与第一棱镜(411)相对应位置处形成第二通光区(415);第二棱镜(412)和第三棱镜(414)的反射光轴沿Y轴正方向,第四棱镜(416)和第六棱镜(418)的反射光轴沿Y轴负方向,第一棱镜(411)的反射光轴沿Z轴负方向,第五棱镜(417)的反射光轴沿Z轴正方向;八个所述探测器组件(46)的接收面分别朝向棱镜组(41)中六个棱镜的反光面和两个通光区;
所述微光成像镜头(1)包括沿光轴依次设置的前镜组(12)、可变光阑组件(13)、后镜组(14)和调焦镜组(15);
所述前镜组(12)包括前镜筒(121)和安装在前镜筒(121)内的前透镜组(122),前镜筒(121)的内径沿光路呈阶梯状逐渐减小;
所述后镜组(14)包括后镜筒(141)和安装在后镜筒(141)内的后透镜组(142)和消光环(143),后镜筒(141) 沿光路呈阶梯状逐渐增大,消光环(143)位于后镜筒(141)最后端;
所述调焦镜组(15)包括驱动组件(153)、调焦镜筒(151)和安装在调焦镜筒(151)内的调焦透镜(152),驱动组件(153)安装在调焦镜筒(151)后端,驱动组件(153)的输出端与调焦透镜(152)相连,用于通过驱动组件(153)驱动调焦透镜(152)在调焦镜筒(151)内沿光轴往复运动;
所述前镜筒(121)的后端与后镜筒(141)的前端相连,后镜筒(141)的后端与调焦镜筒(151)的前端相连;所述调焦镜筒(151)后端与主法兰(2)相连;所述可变光阑组件(13)位于前镜筒(121)和后镜筒(141)之间;主法兰(2)与后镜筒(141)相连,且套设于调焦镜筒(151)和驱动组件(153)外部。
2.根据权利要求1所述用于极端照度环境的远距离大幅宽成像系统,其特征在于:还包括遮光罩(11);
所述遮光罩(11)呈喇叭状,遮光罩(11)的小端与前镜筒(121)前端相连;
所述遮光罩(11)内安装有挡光环(111)。
3.根据权利要求1或2所述用于极端照度环境的远距离大幅宽成像系统,其特征在于:所述前镜筒(121)后端设有第一安装法兰(123),后镜筒(141)前端设有第二安装法兰(144),后端设有第三安装法兰(145),前镜筒(121)和后镜筒(141)通过第一安装法兰(123)和第二安装法兰(144)相连,可变光阑组件(13)位于第一安装法兰(123)和第二安装法兰(144)内;后镜筒(141)通过第三安装法兰(145)与调焦镜筒(151)相连;第三安装法兰(145)通过主法兰(2)与主基板(3)连接;
所述前镜筒(121)外侧壁和第一安装法兰(123)之间、所述第二安装法兰(144)和第三安装法兰(145)之间均设有加强筋(5)。
4.根据权利要求3所述用于极端照度环境的远距离大幅宽成像系统,其特征在于:
所述棱镜组(41)中的六个棱镜之间通过光敏胶紧贴,且非反光面均为涂黑处理的表面。
5.根据权利要求4所述用于极端照度环境的远距离大幅宽成像系统,其特征在于:所述探测器组件(46)的分辨率为1080P,像元尺寸为13μm。
6.根据权利要求5所述用于极端照度环境的远距离大幅宽成像系统,其特征在于:所述安装架包括支架(43)和主框架(45);
所述棱镜组(41)中的各棱镜均通过棱镜座(42)安装在支架(43)内,支架(43)安装在主基板(3)后端面上;
所述主框架(45)套设于支架(43)外部,八个所述探测器组件(46)均安装在主框架(45)上。
7.根据权利要求6所述用于极端照度环境的远距离大幅宽成像系统,其特征在于:
所述探测器组件(46)与主框架(45)之间设有调节垫片(47);
所述探测器组件(46)与主框架(45)通过定位销钉(48)相连。
8.根据权利要求7所述用于极端照度环境的远距离大幅宽成像系统,其特征在于:所述可变光阑组件(13)的通光口径大小在0至100mm之间连续可变。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211570898.7A CN115576082B (zh) | 2022-12-08 | 2022-12-08 | 用于极端照度环境的远距离大幅宽成像系统 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211570898.7A CN115576082B (zh) | 2022-12-08 | 2022-12-08 | 用于极端照度环境的远距离大幅宽成像系统 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN115576082A CN115576082A (zh) | 2023-01-06 |
| CN115576082B true CN115576082B (zh) | 2023-04-11 |
Family
ID=84590711
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202211570898.7A Active CN115576082B (zh) | 2022-12-08 | 2022-12-08 | 用于极端照度环境的远距离大幅宽成像系统 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN115576082B (zh) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117724218B (zh) * | 2024-02-18 | 2024-04-26 | 中国科学院长春光学精密机械与物理研究所 | 一种热稳定相机结构 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102752503A (zh) * | 2012-07-09 | 2012-10-24 | 中国兵器工业第二0五研究所 | 双光路四ccd拼接电视摄像装置 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103487920B (zh) * | 2013-09-30 | 2016-06-08 | 中国科学院西安光学精密机械研究所 | 宽视场像方远心三线阵立体航测相机光学系统 |
| US10539776B2 (en) * | 2017-10-31 | 2020-01-21 | Samantree Medical Sa | Imaging systems with micro optical element arrays and methods of specimen imaging |
| EP3627205A1 (en) * | 2018-09-20 | 2020-03-25 | Koninklijke Philips N.V. | Confocal laser scanning microscope configured for generating line foci |
| CN216595711U (zh) * | 2021-12-16 | 2022-05-24 | 成都翱图智能科技有限公司 | 一种用于3d测量的大视野多倍率双远心镜头 |
-
2022
- 2022-12-08 CN CN202211570898.7A patent/CN115576082B/zh active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102752503A (zh) * | 2012-07-09 | 2012-10-24 | 中国兵器工业第二0五研究所 | 双光路四ccd拼接电视摄像装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN115576082A (zh) | 2023-01-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN115576082B (zh) | 用于极端照度环境的远距离大幅宽成像系统 | |
| CN110824669B (zh) | 一种8k高分辨全景环带光学镜头 | |
| CN106168707B (zh) | 一种成像装置 | |
| CN107942480A (zh) | 一种新型变倍比的折反混合红外光学成像系统 | |
| CN115877353B (zh) | 一种激光测距的接收光机系统 | |
| CN105093486A (zh) | 一种具有双光路系统的全景成像镜头 | |
| CN102879890B (zh) | 一种长焦距大相对孔径变焦距光学系统 | |
| CN109471246B (zh) | 长波红外光学无热化镜头及装配方法 | |
| CN110208920B (zh) | 一种长波机械无热化调焦红外镜头及其装配方法 | |
| CN110989144B (zh) | 2.8mm黑光级日夜两用大通光定焦镜头及其装配方法 | |
| CN111487752B (zh) | 一种6mm星光级日夜两用超高清玻塑混合定焦镜头 | |
| CN210514769U (zh) | 非制冷型长波红外连续变焦镜头 | |
| CN116841102A (zh) | 一种同质材料大视场相机 | |
| US8107809B2 (en) | Camera bellows of rotating-mirror framing camera without principle error | |
| CN106707456A (zh) | 一种全景鱼眼镜头的主筒、全景鱼眼镜头及成像方法 | |
| CN112859309B (zh) | 一种轻量化小焦距无人机型长波变焦测温镜头 | |
| CN111025612B (zh) | 一种低成本、小型化空间遥感相机 | |
| CN210465831U (zh) | 一种紧凑型长焦距星敏感器远心光学系统 | |
| CN210376857U (zh) | 一种高精度小型化长焦距星敏感器光学系统 | |
| CN107526154A (zh) | 便携式广角光学无热化长波红外镜头 | |
| RU182711U1 (ru) | Оптическая система оптико-электронного координатора | |
| CN206411319U (zh) | 一种全景鱼眼镜头的主筒、全景鱼眼镜头 | |
| CN116105860B (zh) | 一种光谱仪光学系统的装调方法及光学系统 | |
| CN104932083A (zh) | 一种大面阵动态监视测量相机光学系统 | |
| CN116338892A (zh) | 一种变焦红外镜头镜片间轴向间隔的装调方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |