CN115540887A - Method, server and vehicle for path planning - Google Patents
Method, server and vehicle for path planning Download PDFInfo
- Publication number
- CN115540887A CN115540887A CN202110739529.5A CN202110739529A CN115540887A CN 115540887 A CN115540887 A CN 115540887A CN 202110739529 A CN202110739529 A CN 202110739529A CN 115540887 A CN115540887 A CN 115540887A
- Authority
- CN
- China
- Prior art keywords
- road
- vehicle
- information
- section
- moment
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images
















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3691—Retrieval, searching and output of information related to real-time traffic, weather, or environmental conditions
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3407—Route searching; Route guidance specially adapted for specific applications
- G01C21/3423—Multimodal routing
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3453—Special cost functions, i.e. other than distance or default speed limit of road segments
- G01C21/3492—Special cost functions, i.e. other than distance or default speed limit of road segments employing speed data or traffic data, e.g. real-time or historical
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3804—Creation or updating of map data
- G01C21/3807—Creation or updating of map data characterised by the type of data
- G01C21/3815—Road data
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0968—Systems involving transmission of navigation instructions to the vehicle
- G08G1/096805—Systems involving transmission of navigation instructions to the vehicle where the transmitted instructions are used to compute a route
- G08G1/096811—Systems involving transmission of navigation instructions to the vehicle where the transmitted instructions are used to compute a route where the route is computed offboard
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/02—Services making use of location information
- H04W4/024—Guidance services
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/30—Services specially adapted for particular environments, situations or purposes
- H04W4/40—Services specially adapted for particular environments, situations or purposes for vehicles, e.g. vehicle-to-pedestrians [V2P]
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/20—Instruments for performing navigational calculations
- G01C21/206—Instruments for performing navigational calculations specially adapted for indoor navigation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3407—Route searching; Route guidance specially adapted for specific applications
- G01C21/343—Calculating itineraries
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Life Sciences & Earth Sciences (AREA)
- Atmospheric Sciences (AREA)
- Biodiversity & Conservation Biology (AREA)
- Ecology (AREA)
- Environmental & Geological Engineering (AREA)
- Environmental Sciences (AREA)
- Traffic Control Systems (AREA)
- Navigation (AREA)
Abstract
本申请提供了一种路径规划的方法、服务器和车辆,该方法包括:服务器获取第一路径,该第一路径为从车辆当前位置到任务目的地的路径,该第一路径包括一段或者多段道路;服务器确定该车辆在该一段或者多段道路中每段道路上行驶的规划时间信息,该车辆根据该每段道路上的规划时间信息行驶时该每段道路上车辆的总数量小于或者等于该每段道路的容量;服务器向该车辆发送路径信息,该路径信息中包括该一段或者多段道路中至少一段道路的信息以及该车辆在该至少一段道路上行驶的规划时间信息。本申请实施例有助于避免车辆之间的冲突,提升车辆之间的通行效率,从而有助于实现车辆之间有序作业或者通行。
The present application provides a path planning method, server and vehicle, the method includes: the server acquires a first path, the first path is the path from the current position of the vehicle to the task destination, and the first path includes one or more road sections The server determines the planned time information of the vehicle traveling on each section of the road, and the total number of vehicles on each section of the road when the vehicle is traveling according to the planned time information on each section of the road is less than or equal to the number of vehicles on each section of the road. The capacity of the section of road; the server sends route information to the vehicle, and the route information includes information about at least one section of the section or multiple sections of road and information about the planned time for the vehicle to travel on the at least one section of road. The embodiments of the present application help to avoid conflicts between vehicles and improve the passing efficiency between vehicles, thereby helping to realize orderly operation or passing between vehicles.
Description
技术领域technical field
本申请涉及智能驾驶领域,并且更具体地,涉及一种路径规划的方法、服务器和车辆。The present application relates to the field of intelligent driving, and more specifically, relates to a path planning method, server and vehicle.
背景技术Background technique
路径规划是生产生活中一种常见的需求,即根据给定起点、终点以及规划要求,计算出一条满足要求的最优路径。Path planning is a common requirement in production and life, that is, to calculate an optimal path that meets the requirements based on a given starting point, end point, and planning requirements.
现有路径规划技术分为两类,一类是类似于地图的提供道路级路径规划的方法,其服务对象是有人驾驶车辆。司机拥有最高决策权,地图会给车辆提供若干类型的最优路径,最终由司机自己选择,司机也可以选择一条与地图提供的路径都不相同的路径。另一类是自动驾驶车辆的路径规划,其服务对象是自动驾驶车辆。自动驾驶车辆存有高精地图,根据高精地图可以自己搜索最优路径。车辆的自动驾驶是基于博弈的思想。Existing path planning technologies are divided into two categories, one is a method of providing road-level path planning similar to maps, and its service object is manned vehicles. The driver has the highest decision-making power. The map will provide the vehicle with several types of optimal routes, which are finally chosen by the driver himself. The driver can also choose a route that is different from the route provided by the map. The other type is path planning for autonomous vehicles, and its service object is autonomous vehicles. The self-driving vehicle has a high-precision map, and can search for the optimal route by itself according to the high-precision map. The automatic driving of the vehicle is based on the idea of the game.
当前的路径规划技术主要是针对车辆本身,并不能避免车辆之间的冲突。因此如何实现多车之间的协同路径规划是一个亟待解决的问题。The current path planning technology is mainly aimed at the vehicle itself, and cannot avoid conflicts between vehicles. Therefore, how to realize the cooperative path planning among multiple vehicles is an urgent problem to be solved.
发明内容Contents of the invention
本申请提供一种路径规划的方法、服务器和车辆,有助于避免车辆之间的冲突,提升车辆之间的通行效率,从而有助于实现车辆之间有序作业或者通行。The present application provides a route planning method, a server and a vehicle, which help to avoid conflicts between vehicles and improve traffic efficiency between vehicles, thereby helping to realize orderly operation or traffic between vehicles.
第一方面,提供了一种路径规划的方法,其特征在于,包括:获取第一路径,该第一路径为从车辆当前位置到任务目的地的路径,该第一路径包括一段或者多段道路;确定该车辆在该一段或者多段道路中每段道路上行驶的规划时间信息,以使得该车辆根据该每段道路上的规划时间信息行驶时该每段道路上车辆的总数量小于或者等于该每段道路的容量;向该车辆发送路径信息,该路径信息中包括该一段或者多段道路中至少一段道路的信息以及该车辆在该至少一段道路上行驶的规划时间信息。In a first aspect, there is provided a method for path planning, which is characterized by comprising: obtaining a first path, the first path is a path from the current position of the vehicle to the task destination, and the first path includes one or more road sections; Determining the planned time information for the vehicle to travel on each of the one or more roads, so that when the vehicle travels according to the planned time information on each road, the total number of vehicles on each road is less than or equal to the the capacity of a section of road; sending route information to the vehicle, the route information including information on at least one section of the section or multiple sections of road and information on the planned time for the vehicle to travel on the at least one section of road.
本申请实施例中,服务器在给车辆下发的路径信息中可以包括一段或者多段道路的信息以及车辆在一段或者多段道路上行驶的规划时间信息,从道路和时间两个维度对车辆的行驶进行控制。通过服务器下发规划时间信息可以使得车辆在每段道路上行驶时每段道路上车辆的总数量小于或者等于每段道路的容量,避免了车辆的总数量大于道路的容量而造成的道路拥挤,从而有助于避免车辆之间的冲突,提升车辆之间的通行效率,从而有助于实现车辆之间有序作业或者通行。In the embodiment of the present application, the route information issued by the server to the vehicle may include information on one or more roads and the planned time information on which the vehicle travels on one or more roads. control. The planning time information issued by the server can make the total number of vehicles on each road section less than or equal to the capacity of each road section when the vehicles are driving on each section of the road, avoiding road congestion caused by the total number of vehicles being greater than the capacity of the road. This helps to avoid conflicts between vehicles, improves the efficiency of traffic between vehicles, and helps to achieve orderly work or traffic between vehicles.
在一些可能的实现方式中,该方法包括:获取第一路径,该第一路径为从车辆当前位置到任务目的地的路径,该第一路径包括一段或者多段道路;根据该一段或者多段道路中每段道路的容量,确定该车辆在该一段或者多段道路中每段道路上行驶的规划时间信息;向该车辆发送路径信息,该路径信息中包括该一段或者多段道路中至少一段道路的信息以及该车辆在该至少一段道路上行驶的规划时间信息。In some possible implementations, the method includes: acquiring a first route, the first route is a route from the current position of the vehicle to the task destination, and the first route includes one or more sections of road; The capacity of each section of road, determine the planning time information of the vehicle traveling on each section of the section or sections of road; send route information to the vehicle, the path information includes the information of at least one section of the section or sections of road and The planned time information of the vehicle traveling on the at least one section of road.
结合第一方面,在第一方面的某些实现方式中,该获取第一路径之前,该方法还包括:获取任务信息,该任务信息包括用于指示该任务目的地的信息。With reference to the first aspect, in some implementation manners of the first aspect, before acquiring the first route, the method further includes: acquiring task information, where the task information includes information indicating a destination of the task.
在一些可能的实现方式中,该方法还包括:根据该任务目的地,获取第二路径,该第二路径与该第一路径相关联。In some possible implementation manners, the method further includes: acquiring a second route according to the task destination, where the second route is associated with the first route.
本申请实施例中,服务器可以通过任务信息中用于指示任务目的地的信息来获取第二路径,进而通过第二路径来获取第一路径的信息。In this embodiment of the present application, the server may obtain the second route through the information indicating the destination of the task in the task information, and then obtain the information of the first route through the second route.
在一些可能的实现方式中,该第一路径可以是第二路径的一部分。示例性的,任务信息中指示的任务目的地为第一位置,服务器可以根据该第一位置,获取第二路径。若服务器确定从车辆的起始位置到任务目的地的第二路径中包括故障点(故障点处不可通行),那么服务可以先给车辆下发第三路径的信息,该第三路径可以是从车辆当前的位置到故障点的路径。其中该第二路径可以由该第三路径和该第一路径组成,该第一路径可以是从故障点到任务目的地的路径。In some possible implementations, the first path may be a part of the second path. Exemplarily, the task destination indicated in the task information is the first location, and the server can obtain the second path according to the first location. If the server determines that the second path from the starting position of the vehicle to the task destination includes a fault point (the fault point is impassable), then the service can first send the information of the third path to the vehicle, and the third path can be from The path from the current position of the vehicle to the fault point. Wherein the second path may be composed of the third path and the first path, and the first path may be a path from the failure point to the task destination.
一段时间后,若服务器确定车辆已经到达故障点且故障点的故障已经消除,那么服务器可以为车辆下发路径信息,该路径信息中包括该第一路径中至少一段道路的信息以及该车辆在该至少一段道路上行驶的规划时间信息。After a period of time, if the server determines that the vehicle has arrived at the fault point and the fault at the fault point has been eliminated, the server can issue path information for the vehicle, which includes information on at least one section of the road in the first path and information on the vehicle's location in the first path. Planning time information for traveling on at least one section of the road.
结合第一方面,在第一方面的某些实现方式中,该至少一段道路包括第一道路,该车辆在该第一道路上行驶的规划时间信息包括用于指示第一时刻的信息和用于指示第二时刻的信息,该第一时刻为该车辆驶入该第一道路的时刻,该第二时刻为该车辆驶离该第一道路的时刻,该方法还包括:在第一时刻和该第二时刻之间,若该第一道路上车辆的总数量大于该第一道路的容量且该车辆的优先级高于另一车辆的优先级,指示该另一车辆在该第一时刻之前驶离该第一道路,或者,指示该另一车辆在该第二时刻之后驶入该第一道路,该另一车辆为计划在该第一时刻和该第二时刻之间行驶在该第一道路上的车辆。With reference to the first aspect, in some implementations of the first aspect, the at least one section of road includes a first road, and the planned time information of the vehicle traveling on the first road includes information indicating the first moment and information for information indicating a second moment, the first moment is the moment when the vehicle enters the first road, and the second moment is the moment when the vehicle leaves the first road, the method further includes: at the first moment and the Between the second time, if the total number of vehicles on the first road is greater than the capacity of the first road and the priority of this vehicle is higher than that of another vehicle, instruct the other vehicle to drive before the first time leaving the first road, or, instructing the other vehicle to enter the first road after the second time, the other vehicle not planning to travel on the first road between the first time and the second time on the vehicle.
本申请实施例中,当服务器确定某个时刻第一道路上车辆的总数量大于该第一道路的容量时,服务器可以向该时刻下优先级较低的车辆发送指示信息,从而指示优先级较低的车辆在该第一时刻之前驶离该第一道路,或者,指示优先级较低的车辆在该第二时刻之后驶入该第一道路。从而使得任意时刻下道路上车辆的总数量小于等于道路的容量,避免车辆之间发生冲突,提升车辆之间的通行效率,从而有助于实现车辆之间有序作业或者通行。In the embodiment of the present application, when the server determines that the total number of vehicles on the first road at a certain moment is greater than the capacity of the first road, the server may send indication information to vehicles with lower priority at this moment, thereby indicating that the vehicles with lower priority A low vehicle leaves the first road before the first moment, or indicates a lower priority vehicle enters the first road after the second moment. Therefore, the total number of vehicles on the road at any time is less than or equal to the capacity of the road, avoiding conflicts between vehicles, improving the efficiency of traffic between vehicles, and helping to achieve orderly operation or traffic between vehicles.
结合第一方面,在第一方面的某些实现方式中,该车辆在该每段道路上行驶的规划时间信息包括驶入该每段道路的时刻和驶离该每段道路的时刻,或者,该车辆在每段道路上行驶的规划时间信息包括驶入该每段道路的时刻以及该车辆在该每段道路上的速度信息,或者,该车辆在每段道路上行驶的规划时间信息包括驶离该每段道路的时刻以及该车辆在该每段道路上的速度信息。With reference to the first aspect, in some implementations of the first aspect, the planned time information of the vehicle traveling on each road segment includes the time of entering each road segment and the time of leaving each road segment, or, The planning time information of the vehicle traveling on each section of road includes the time when the vehicle enters each section of road and the speed information of the vehicle on each section of road, or, the planning time information of the vehicle traveling on each section of road includes driving The time away from each section of road and the speed information of the vehicle on each section of road.
结合第一方面,在第一方面的某些实现方式中,该路径信息还包括该车辆在该至少一段道路上的行驶模式的信息,该行驶模式包括直线行驶、自然转弯模式或者蟹行模式中的至少一种。With reference to the first aspect, in some implementations of the first aspect, the route information further includes information about the driving mode of the vehicle on the at least one section of the road, and the driving mode includes straight-line driving, natural turning mode or crab driving mode at least one of .
本申请实施例中,服务器还可以向车辆指示在至少一段道路上的行驶模式的信息,从而可以使得车辆明确在该至少一段道路中的每段道路上的行驶模式。In this embodiment of the present application, the server may also indicate to the vehicle the information of the driving mode on at least one section of road, so that the vehicle may know the driving mode on each section of the at least one section of road.
结合第一方面,在第一方面的某些实现方式中,该获取第一路径,包括:根据该车辆的通行等级和/或该车辆的类型,确定允许该车辆行驶的道路,该允许该车辆行驶的道路包括该一段或者多段道路;根据该允许该车辆行驶的道路,得到该第一路径。With reference to the first aspect, in some implementations of the first aspect, the obtaining the first route includes: determining a road that allows the vehicle to travel according to the traffic level of the vehicle and/or the type of the vehicle, and the road that allows the vehicle to travel The driving road includes the one or more road sections; the first route is obtained according to the road that the vehicle is allowed to run on.
本申请实施例中,服务器还可以根据车辆的通行等级和/或车辆的类型,确定允许车辆行驶的道路,这样可以帮助服务器更好的为车辆规划可行路径,避免车辆行驶在不符合条件的道路上。In the embodiment of the present application, the server can also determine the road that the vehicle is allowed to drive according to the traffic level of the vehicle and/or the type of the vehicle, which can help the server better plan the feasible path for the vehicle and avoid the vehicle from driving on the unqualified road superior.
在一些可能的实现方式中,该方法还包括:根据车辆的类型确定车辆的等级;根据车辆的等级,确定允许该车辆行驶的道路。In some possible implementation manners, the method further includes: determining the level of the vehicle according to the type of the vehicle; and determining a road on which the vehicle is allowed to travel according to the level of the vehicle.
在一些可能的实现方式中,该一段或者多段道路的道路等级小于或者等于该车辆的通行等级。In some possible implementation manners, the road grade of the one or more road sections is less than or equal to the traffic grade of the vehicle.
在一些可能的实现方式中,该一段或者多段道路的道路等级小于或者等于该车辆的等级。In some possible implementation manners, the road grade of the one or more road sections is less than or equal to the grade of the vehicle.
在一些可能的实现方式中,服务器可以在确定车辆的通行等级与道路等级匹配,和/或,确定车辆的类型与道路等级匹配时,确定允许车辆行驶的道路。In some possible implementation manners, the server may determine the road on which the vehicle is allowed to travel when determining that the traffic level of the vehicle matches the road level, and/or when determining that the type of the vehicle matches the road level.
结合第一方面,在第一方面的某些实现方式中,该获取第一路径,包括:向地图服务器发送该任务目的地的信息;获取该地图服务器根据该任务目的地得到的该第一路径的信息。With reference to the first aspect, in some implementations of the first aspect, the acquiring the first route includes: sending information about the task destination to a map server; acquiring the first route obtained by the map server according to the task destination Information.
本申请实施例中,服务器在获取到车辆的任务目的地时,可以向另一服务器发送该任务目的地,从而使得另一服务器规划第一路径。另一服务器可以将第一路径的信息发送给服务器,这样可以避免在服务器中保存地图信息,从而有助于节省服务器的存储开销。In the embodiment of the present application, when the server acquires the task destination of the vehicle, it may send the task destination to another server, so that the other server plans the first route. Another server may send the information of the first path to the server, which avoids saving the map information in the server, thereby helping to save the storage cost of the server.
结合第一方面,在第一方面的某些实现方式中,该路径信息中还包括用于指示该车辆在第二道路上进行人字形调头的信息,该至少一段道路包括该第二道路。With reference to the first aspect, in some implementation manners of the first aspect, the route information further includes information for instructing the vehicle to perform a chevron turn on the second road, and the at least one section of road includes the second road.
本申请实施例中,若服务器获取的任务信息中包括用于指示车辆需要进行人字形调头的信息,那么服务器在向车辆下发的路径信息中可以携带用于指示该车辆在第二道路上进行人字形调头的信息,从而使得车辆明确在第二道路上进行人字形调头。In the embodiment of the present application, if the task information acquired by the server includes information indicating that the vehicle needs to perform a herringbone U-turn, then the server may carry information indicating that the vehicle needs to perform a herringbone U-turn on the second road in the route information sent to the vehicle. The information of the herringbone U-turn, so that the vehicle clearly performs the Herringbone U-turn on the second road.
第二方面,提供一种路径规划的方法,该方法包括:车辆向服务器发送车辆当前位置的信息;车辆接收服务器发送的路径信息,该路径信息中包括一段或者多段道路中至少一段道路的信息以及该车辆在该至少一段道路上行驶的规划时间信息,该车辆根据该至少一段道路中每段道路上的规划时间信息行驶时该每段道路上车辆的总数量小于或者等于该每段道路的容量,该一段或者多段道路所组成的第一路径为从该车辆当前位置至任务目的地的路径。In a second aspect, a method for route planning is provided, the method comprising: the vehicle sends information about the current position of the vehicle to the server; the vehicle receives the route information sent by the server, and the route information includes information about at least one segment of roads in one or more segments of the road and The planned time information of the vehicle traveling on the at least one section of the road, when the vehicle is traveling according to the planned time information on each section of the road in the at least one section of the road, the total number of vehicles on each section of the road is less than or equal to the capacity of each section of the road , the first path formed by the one or more road sections is the path from the current position of the vehicle to the task destination.
结合第二方面,在第二方面的某些实现方式中,该至少一段道路包括第一道路,该车辆在该第一道路上行驶的规划时间信息包括用于指示第一时刻的信息和用于指示第二时刻的信息,该第一时刻为该车辆驶入该第一道路的时刻,该第二时刻为该车辆驶离该第一道路的时刻,该方法还包括:该车辆接收服务器发送的指示信息,该指示信息用于指示该车辆在第三时刻之间驶离该第一道路;或者,指示该车辆在第四时刻之后驶入该第一道路;其中,另一车辆为计划在该第三时刻和该第四时刻之间行驶在该第一道路上的车辆,该另一车辆的优先级大于或者等于该车辆的优先级,该第三时刻与该第一时刻相同或者该第三时刻在该第一时刻之后,或者,该第四时刻与该第二时刻相同或者该第四时刻在该第二时刻之前。With reference to the second aspect, in some implementations of the second aspect, the at least one section of road includes a first road, and the planned time information of the vehicle traveling on the first road includes information indicating the first moment and information for information indicating a second moment, the first moment is the moment when the vehicle enters the first road, and the second moment is the moment when the vehicle leaves the first road, the method further includes: the vehicle receives the information sent by the server instruction information, the instruction information is used to instruct the vehicle to leave the first road between the third moment; or, to instruct the vehicle to enter the first road after the fourth moment; wherein another vehicle is planned to be on the first road For vehicles traveling on the first road between the third moment and the fourth moment, the priority of the other vehicle is greater than or equal to the priority of the vehicle, the third moment is the same as the first moment or the third The time is after the first time, or the fourth time is the same as the second time or the fourth time is before the second time.
在一些可能的实现方式中,该指示信息可以携带在另一路径信息中。In some possible implementation manners, the indication information may be carried in another path information.
例如,服务器为车辆1确定的规划时间信息中指示车辆1在t1时刻驶入第一道路且在t2时刻驶离第一道路。之后服务器为车辆2确定的规划时间信息中指示车辆2在t3时刻驶入第一道路且在t4时刻驶离第一道路。若服务器确定第一道路的容量为1且t3时刻位于t1时刻之后且在t2时刻之前,那么服务器可以向车辆1发送指示信息,该指示信息用于指示车辆1在在t3时刻之前驶离该第一道路;或者,若服务器确定第一道路的容量为1且t4时刻位于t1时刻之后且在t2时刻之前,那么服务器可以向车辆1发送指示信息,该指示信息用于指示车辆1在t4时刻之后驶入该第一道路。For example, the planning time information determined by the server for the
结合第二方面,在第二方面的某些实现方式中,该车辆在该每段道路上行驶的规划时间信息包括驶入该每段道路的时刻和驶离该每段道路的时刻,或者,该车辆在每段道路上行驶的规划时间信息包括驶入该每段道路的时刻以及该车辆在该每段道路上的速度信息,或者,该车辆在每段道路上行驶的规划时间信息包括驶离该每段道路的时刻以及该车辆在该每段道路上的速度信息。With reference to the second aspect, in some implementations of the second aspect, the planned time information of the vehicle traveling on each road segment includes the time of entering each road segment and the time of leaving each road segment, or, The planning time information of the vehicle traveling on each section of road includes the time when the vehicle enters each section of road and the speed information of the vehicle on each section of road, or, the planning time information of the vehicle traveling on each section of road includes driving The time away from each section of road and the speed information of the vehicle on each section of road.
结合第二方面,在第二方面的某些实现方式中,该方法还包括:车辆向用户提示该车辆在该至少一段道路上行驶的规划时间信息。With reference to the second aspect, in some implementation manners of the second aspect, the method further includes: the vehicle prompts the user with information about the planned time when the vehicle travels on the at least one segment of the road.
在一些可能的实现方式中,该车辆可以通过声音或者人机交互界面HMI向用户提示该车辆在该至少一段道路上行驶的规划时间信息。In some possible implementation manners, the vehicle may prompt the user with information about the planned time for the vehicle to travel on the at least one segment of the road through sound or a human-machine interface (HMI).
结合第二方面,在第二方面的某些实现方式中,该路径信息还包括该车辆在该至少一段道路上的行驶模式的信息,该行驶模式包括直线行驶、自然转弯模式或者蟹行模式中的至少一种。With reference to the second aspect, in some implementations of the second aspect, the route information further includes information about the driving mode of the vehicle on the at least one section of the road, and the driving mode includes straight-line driving, natural turning mode or crab driving mode at least one of .
结合第二方面,在第二方面的某些实现方式中,该路径信息中包括用于指示该车辆在第二道路上进行人字形调头的信息,该至少一段道路包括该第二道路。With reference to the second aspect, in some implementation manners of the second aspect, the route information includes information for instructing the vehicle to perform a herringbone U-turn on the second road, and the at least one section of road includes the second road.
结合第二方面,在第二方面的某些实现方式中,该路径信息中包括第一标识信息,该接收服务器发送的路径信息之前,该方法还包括:向该服务器发送任务信息,该任务信息中包括用于指示该任务目的地的信息;接收该服务器根据该任务信息发送的第二标识信息;其中,该方法包括:若该第一标识信息和该第二标识信息匹配,根据该路径信息行驶。With reference to the second aspect, in some implementations of the second aspect, the path information includes first identification information, and before receiving the path information sent by the server, the method further includes: sending task information to the server, the task information including information for indicating the destination of the task; receiving the second identification information sent by the server according to the task information; wherein, the method includes: if the first identification information matches the second identification information, according to the path information drive.
结合第二方面,在第二方面的某些实现方式中,该方法还包括:若对该至少一段道路的信息和/或该车辆在该至少一段道路上行驶的规划时间信息校验成功,根据该路径信息行驶。With reference to the second aspect, in some implementations of the second aspect, the method further includes: if the information on the at least one section of the road and/or the planned time information of the vehicle traveling on the at least one section of the road is successfully verified, according to This route information travels.
第三方面,提供了一种装置,该装置包括:获取单元,用于获取第一路径,该第一路径为从车辆当前位置到任务目的地的路径,该第一路径包括一段或者多段道路;确定单元,用于确定该车辆在该一段或者多段道路中每段道路上行驶的规划时间信息,以使得该车辆根据该每段道路上的规划时间信息行驶时该每段道路上车辆的总数量小于或者等于该每段道路的容量;发送单元,用于向该车辆发送路径信息,该路径信息中包括该一段或者多段道路中至少一段道路的信息以及该车辆在该至少一段道路上行驶的规划时间信息。In a third aspect, an apparatus is provided, which includes: an acquisition unit configured to acquire a first path, the first path is a path from the current position of the vehicle to the task destination, and the first path includes one or more road sections; A determining unit, configured to determine the planned time information of the vehicle traveling on each section of the road section or sections, so that the total number of vehicles on each section of the road when the vehicle travels according to the planned time information on each section of the road Less than or equal to the capacity of each section of the road; the sending unit is used to send the route information to the vehicle, the route information includes the information of at least one section of the one or more sections of roads and the plan for the vehicle to travel on the at least one section of the road time information.
结合第三方面,在第三方面的某些实现方式中,该获取单元,还用于在该获取第一路径之前,获取任务信息,该任务信息包括用于指示该任务目的地的信息。With reference to the third aspect, in some implementation manners of the third aspect, the acquiring unit is further configured to acquire task information before acquiring the first route, where the task information includes information indicating a destination of the task.
结合第三方面,在第三方面的某些实现方式中,该至少一段道路包括第一道路,该车辆在该第一道路上行驶的规划时间信息包括用于指示第一时刻的信息和用于指示第二时刻的信息,该第一时刻为该车辆驶入该第一道路的时刻,该第二时刻为该车辆驶离该第一道路的时刻,该发送单元,还用于:在第一时刻和该第二时刻之间,若该第一道路上车辆的总数量大于该第一道路的容量且该车辆的优先级高于另一车辆的优先级,向该另一车辆发送指示信息,该指示信息用于指示该另一车辆在该第一时刻之前驶离该第一道路,或者,指示该另一车辆在该第二时刻之后驶入该第一道路,该另一车辆为计划在该第一时刻和该第二时刻之间行驶在该第一道路上的车辆。With reference to the third aspect, in some implementations of the third aspect, the at least one section of road includes a first road, and the planned time information of the vehicle traveling on the first road includes information indicating the first moment and information for information indicating the second moment, the first moment is the moment when the vehicle enters the first road, and the second moment is the moment when the vehicle leaves the first road, the sending unit is also used for: at the first Between time and the second time, if the total number of vehicles on the first road is greater than the capacity of the first road and the priority of the vehicle is higher than the priority of another vehicle, send instruction information to the other vehicle, The indication information is used to instruct the other vehicle to leave the first road before the first moment, or to indicate the other vehicle to enter the first road after the second moment, and the other vehicle is planned to Vehicles traveling on the first road between the first moment and the second moment.
结合第三方面,在第三方面的某些实现方式中,该车辆在该每段道路上行驶的规划时间信息包括驶入该每段道路的时刻和驶离该每段道路的时刻,或者,该车辆在每段道路上行驶的规划时间信息包括驶入该每段道路的时刻以及该车辆在该每段道路上的速度信息,或者,该车辆在每段道路上行驶的规划时间信息包括驶离该每段道路的时刻以及该车辆在该每段道路上的速度信息。With reference to the third aspect, in some implementations of the third aspect, the planned time information of the vehicle traveling on each road segment includes the time of entering each road segment and the time of leaving each road segment, or, The planning time information of the vehicle traveling on each section of road includes the time when the vehicle enters each section of road and the speed information of the vehicle on each section of road, or, the planning time information of the vehicle traveling on each section of road includes driving The time away from each section of road and the speed information of the vehicle on each section of road.
结合第三方面,在第三方面的某些实现方式中,该路径信息还包括该车辆在该至少一段道路上的行驶模式的信息,该行驶模式包括直线行驶、自然转弯模式或者蟹行模式中的至少一种。With reference to the third aspect, in some implementations of the third aspect, the route information further includes information about the driving mode of the vehicle on the at least one section of the road, and the driving mode includes straight-line driving, natural turning mode or crab driving mode at least one of .
结合第三方面,在第三方面的某些实现方式中,该获取单元具体用于:根据该车辆的通行等级和/或该车辆的类型,确定允许该车辆行驶的道路,该允许该车辆行驶的道路包括该一段或者多段道路;根据该允许该车辆行驶的道路,得到该第一路径。With reference to the third aspect, in some implementations of the third aspect, the acquiring unit is specifically configured to: determine the road on which the vehicle is allowed to travel according to the traffic level of the vehicle and/or the type of the vehicle, and the road that the vehicle is allowed to travel on The road includes the one or more road sections; the first route is obtained according to the road that allows the vehicle to travel.
结合第三方面,在第三方面的某些实现方式中,该获取单元具体用于:向地图服务器发送该任务目的地的信息;获取该地图服务器根据该任务目的地得到的该第一路径的信息。With reference to the third aspect, in some implementation manners of the third aspect, the obtaining unit is specifically configured to: send the information of the mission destination to the map server; obtain the information of the first route obtained by the map server according to the mission destination. information.
结合第三方面,在第三方面的某些实现方式中,该路径信息中还包括用于指示该车辆在第二道路上进行人字形调头的信息,该至少一段道路包括该第二道路。With reference to the third aspect, in some implementation manners of the third aspect, the route information further includes information for instructing the vehicle to perform a chevron turn on the second road, and the at least one section of road includes the second road.
第四方面,提供了一种装置,该装置包括:发送单元,用于向服务器发送该装置当前位置的信息;接收单元,用于接收服务器发送的路径信息,该路径信息中包括一段或者多段道路中至少一段道路的信息以及该装置在该至少一段道路上行驶的规划时间信息,该装置根据该至少一段道路中每段道路上的规划时间信息行驶时该每段道路上车辆的总数量小于或者等于该每段道路的容量,该一段或者多段道路所组成的第一路径为从该装置当前位置至任务目的地的路径。In a fourth aspect, a device is provided, which includes: a sending unit, configured to send information about the current location of the device to a server; a receiving unit, configured to receive route information sent by the server, the route information including one or more road segments Information on at least one section of the road and the planned time information of the device traveling on the at least one section of the road. When the device travels according to the planned time information on each section of the at least one section of the road, the total number of vehicles on each section of the road is less than or Equal to the capacity of each section of road, the first path formed by one or more sections of road is the path from the current location of the device to the task destination.
结合第四方面,在第四方面的某些实现方式中,该至少一段道路包括第一道路,该装置在该第一道路上行驶的规划时间信息包括用于指示第一时刻的信息和用于指示第二时刻的信息,该第一时刻为该装置驶入该第一道路的时刻,该第二时刻为该装置驶离该第一道路的时刻,该接收单元还用于:接收服务器发送的指示信息,该指示信息用于指示该装置在第三时刻之间驶离该第一道路;或者,指示该装置在第四时刻之后驶入该第一道路;其中,另一车辆为计划在该第三时刻和该第四时刻之间行驶在该第一道路上的车辆,该另一车辆的优先级大于或者等于该装置的优先级,该第三时刻与该第一时刻相同或者该第三时刻在该第一时刻之后,或者,该第四时刻与该第二时刻相同或者该第四时刻在该第二时刻之前。With reference to the fourth aspect, in some implementations of the fourth aspect, the at least one section of road includes a first road, and the planned time information of the device traveling on the first road includes information indicating the first moment and information for information indicating a second moment, the first moment is the moment when the device enters the first road, the second moment is the moment when the device leaves the first road, and the receiving unit is also used to: receive the information sent by the server instruction information, the instruction information is used to instruct the device to leave the first road between the third moment; or, to instruct the device to enter the first road after the fourth moment; wherein, another vehicle is planned to be on the first road For vehicles traveling on the first road between the third moment and the fourth moment, the priority of the other vehicle is greater than or equal to the priority of the device, the third moment is the same as the first moment or the third The time is after the first time, or the fourth time is the same as the second time or the fourth time is before the second time.
在一些可能的实现方式中,该指示信息可以携带在另一路径信息中。In some possible implementation manners, the indication information may be carried in another path information.
结合第二方面,在第二方面的某些实现方式中,该装置在该每段道路上行驶的规划时间信息包括驶入该每段道路的时刻和驶离该每段道路的时刻,或者,该装置在每段道路上行驶的规划时间信息包括驶入该每段道路的时刻以及该车辆在该每段道路上的速度信息,或者,该装置在每段道路上行驶的规划时间信息包括驶离该每段道路的时刻以及该车辆在该每段道路上的速度信息。With reference to the second aspect, in some implementations of the second aspect, the planned time information of the device traveling on each road segment includes the time of entering each road segment and the time of leaving each road segment, or, The planning time information of the device traveling on each section of road includes the time when the vehicle enters each section of road and the speed information of the vehicle on each section of road, or, the planning time information of the device traveling on each section of road includes driving The time away from each section of road and the speed information of the vehicle on each section of road.
结合第四方面,在第四方面的某些实现方式中,该装置还包括:提示单元,用于向用户提示该装置在该至少一段道路上行驶的规划时间信息。With reference to the fourth aspect, in some implementation manners of the fourth aspect, the device further includes: a prompting unit configured to prompt the user with information about the planned time for the device to travel on the at least one section of the road.
结合第四方面,在第四方面的某些实现方式中,该路径信息还包括该装置在该至少一段道路上的行驶模式的信息,该行驶模式包括直线行驶、自然转弯模式或者蟹行模式中的至少一种。With reference to the fourth aspect, in some implementations of the fourth aspect, the route information further includes information about the driving mode of the device on the at least one section of the road, and the driving mode includes straight-line driving, natural turning mode or crab driving mode at least one of .
结合第四方面,在第四方面的某些实现方式中,该路径信息中包括用于指示该装置在第二道路上进行人字形调头的信息,该至少一段道路包括该第二道路。With reference to the fourth aspect, in some implementation manners of the fourth aspect, the route information includes information for instructing the device to perform a herringbone U-turn on the second road, and the at least one section of road includes the second road.
结合第四方面,在第四方面的某些实现方式中,该路径信息中包括第一标识信息,该发送单元,还用于在接收服务器发送的路径信息之前,向该服务器发送任务信息,该任务信息中包括用于指示该任务目的地的信息;该接收单元,还用于接收该服务器根据该任务信息发送的第二标识信息;该装置还包括:校验单元,用于在该装置根据该路径信息行驶之前,确定该第一标识信息和该第二标识信息匹配。With reference to the fourth aspect, in some implementation manners of the fourth aspect, the path information includes first identification information, and the sending unit is further configured to send task information to the server before receiving the path information sent by the server, the The task information includes information used to indicate the task destination; the receiving unit is also used to receive the second identification information sent by the server according to the task information; Before driving on the route information, it is determined that the first identification information matches the second identification information.
结合第四方面,在第四方面的某些实现方式中,该装置还包括:校验单元,用于在该装置根据该路径信息行驶之前,确定对该至少一段道路的信息和/或该装置在该至少一段道路上行驶的规划时间信息校验成功。With reference to the fourth aspect, in some implementation manners of the fourth aspect, the device further includes: a checking unit, configured to determine information about at least a section of the road and/or the device before driving according to the route information. The planning time information of traveling on the at least one section of the road is verified successfully.
第五方面,提供了一种装置,该装置包括处理单元和存储单元,其中存储单元用于存储指令,处理单元执行存储单元所存储的指令,以使该装置执行第一方面中任一种可能的方法。In a fifth aspect, a device is provided, the device includes a processing unit and a storage unit, wherein the storage unit is used to store instructions, and the processing unit executes the instructions stored in the storage unit, so that the device performs any one of the possibilities in the first aspect Methods.
第六方面,提供了一种装置,该装置包括处理单元和存储单元,其中存储单元用于存储指令,处理单元执行存储单元所存储的指令,以使该装置执行第二方面中任一种可能的方法。According to a sixth aspect, there is provided a device, which includes a processing unit and a storage unit, wherein the storage unit is used to store instructions, and the processing unit executes the instructions stored in the storage unit, so that the device can perform any one of the possibilities in the second aspect. Methods.
第七方面,提供了一种服务器,该服务器包括第三方面或者第五方面中所述的装置。In a seventh aspect, a server is provided, and the server includes the device described in the third aspect or the fifth aspect.
第八方面,提供了一种车辆,该车辆包括第四方面或者第六方面中所述的装置。In an eighth aspect, a vehicle is provided, and the vehicle includes the device described in the fourth aspect or the sixth aspect.
第九方面,提供了一种计算机程序产品,所述计算机程序产品包括:计算机程序代码,当所述计算机程序代码在计算机上运行时,使得计算机执行上述第一方面中的方法;或者,当所述计算机程序代码在计算机上运行时,使得计算机执行上述第二方面中的方法。In a ninth aspect, a computer program product is provided, the computer program product comprising: computer program code, when the computer program code is run on a computer, causing the computer to execute the method in the above first aspect; or, when the When the computer program code is run on the computer, the computer is made to execute the method in the second aspect above.
需要说明的是,上述计算机程序代码可以全部或者部分存储在第一存储介质上,其中第一存储介质可以与处理器封装在一起的,也可以与处理器单独封装,本申请实施例对此不作具体限定。It should be noted that all or part of the above computer program code may be stored on the first storage medium, where the first storage medium may be packaged together with the processor, or may be packaged separately with the processor, and this embodiment of the present application does not make any Specific limits.
第十方面,提供了一种计算机可读介质,所述计算机可读介质存储有程序代码,当所述计算机程序代码在计算机上运行时,使得计算机执行上述第一方面或者第二方面中的方法。In a tenth aspect, a computer-readable medium is provided, the computer-readable medium stores program codes, and when the computer program codes run on a computer, the computer executes the method in the above-mentioned first aspect or the second aspect .
第十一方面,本申请实施例提供了一种芯片系统,该芯片系统包括处理器,用于调用存储器中存储的计算机程序或计算机指令,以使得该处理器执行上述任一方面以及上述任一方面可能的设计所述的方法,或者,执行上述任二方面以及上述任一方面可能的设计所述的方法。In an eleventh aspect, an embodiment of the present application provides a chip system, the chip system includes a processor, configured to call a computer program or a computer instruction stored in a memory, so that the processor performs any of the above aspects and any of the above The method described in the possible design of the aspect, or the method described in the possible design of any of the above two aspects and any of the above aspects.
结合第十一方面,在一种可能的实现方式中,该处理器通过接口与存储器耦合。With reference to the eleventh aspect, in a possible implementation manner, the processor is coupled to the memory through an interface.
结合第十一方面,在一种可能的实现方式中,该芯片系统还包括存储器,该存储器中存储有计算机程序或计算机指令。With reference to the eleventh aspect, in a possible implementation manner, the chip system further includes a memory, where computer programs or computer instructions are stored.
第十二方面,本申请实施例提供了一种处理器,该处理器用于调用存储器中存储的计算机程序或计算机指令,以使得该处理器执行任一方面以及上述任一方面可能的设计所述的方法,或者,以使得该处理器执行任二方面以及上述任一方面可能的设计所述的方法。In a twelfth aspect, the embodiment of the present application provides a processor, the processor is used to call the computer program or computer instruction stored in the memory, so that the processor executes any aspect and the possible design of any aspect above. The method, or, so that the processor executes the method described in any two aspects and possible designs of any one of the above aspects.
第十三方面,本申请实施例提供了一种车辆控制系统,该系统包含如上述第三方面所述的装置。In a thirteenth aspect, the embodiment of the present application provides a vehicle control system, which includes the device as described in the third aspect above.
附图说明Description of drawings
图1是本申请实施例的路径规划的方法的应用场景。FIG. 1 is an application scenario of the path planning method according to the embodiment of the present application.
图2是本申请实施例提供的系统的示意性框图。Fig. 2 is a schematic block diagram of a system provided by an embodiment of the present application.
图3是本申请实施例提供的路径规划的方法的示意性流程图。Fig. 3 is a schematic flowchart of a method for path planning provided by an embodiment of the present application.
图4是本申请实施例提供的道路分段以及关键节点的示意图。Fig. 4 is a schematic diagram of road segments and key nodes provided by the embodiment of the present application.
图5是本申请实施例提供的为一条或者一段道路分配时间资源的示意图。Fig. 5 is a schematic diagram of allocating time resources for one or a section of roads provided by the embodiment of the present application.
图6是自然转弯模式的示意图。Fig. 6 is a schematic diagram of a natural turning mode.
图7是蟹行模式的示意图。Fig. 7 is a schematic diagram of a crab pattern.
图8是本申请实施例提供的路径规划模块向车辆下发的路径信息的示意图。Fig. 8 is a schematic diagram of the route information delivered to the vehicle by the route planning module provided by the embodiment of the present application.
图9是本申请实施例提供的路径规划的方法的示意性流程图。FIG. 9 is a schematic flowchart of a method for path planning provided by an embodiment of the present application.
图10是本申请实施例提供的路径规划的方法的另一示意性流程图。Fig. 10 is another schematic flowchart of the path planning method provided by the embodiment of the present application.
图11是人字形调头的示意图。Fig. 11 is a schematic diagram of a herringbone U-turn.
图12是本申请实施例提供的路径规划模块向车辆下发的路径信息的示意图。Fig. 12 is a schematic diagram of the route information delivered to the vehicle by the route planning module provided by the embodiment of the present application.
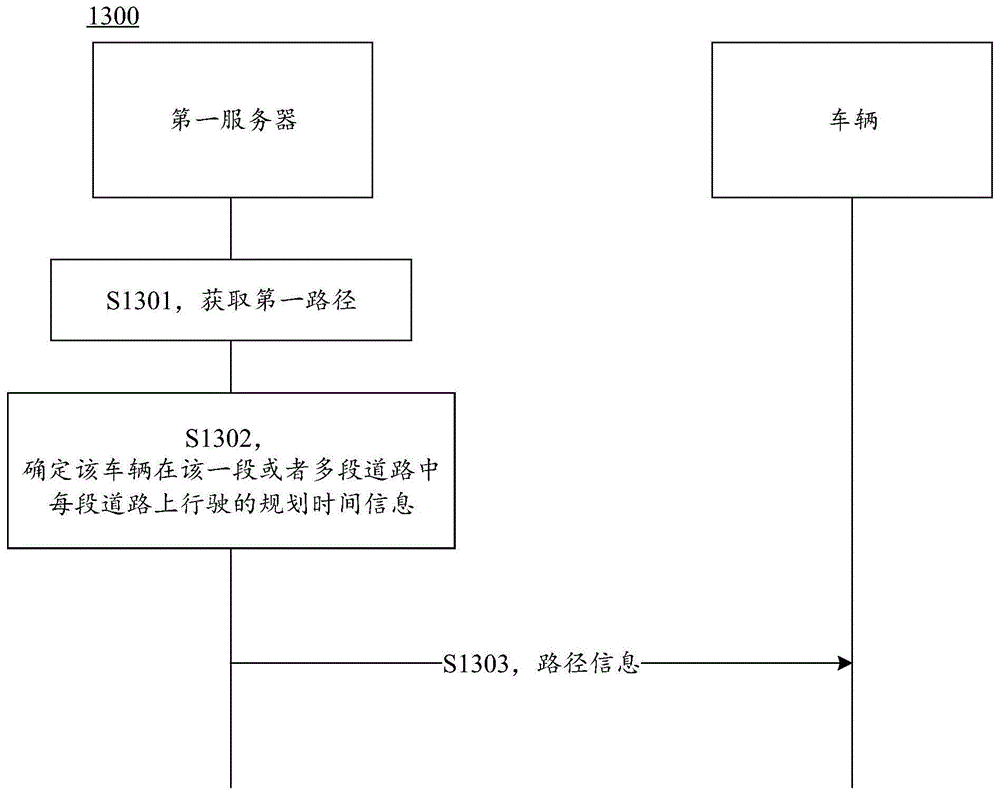
图13是本申请实施例提供的一种路径规划的方法的另一示意性流程图。Fig. 13 is another schematic flowchart of a path planning method provided by an embodiment of the present application.
图14是本申请实施例提供的装置的示意性框图。Fig. 14 is a schematic block diagram of a device provided by an embodiment of the present application.
图15是本申请实施例提供的装置的另一示意性框图。Fig. 15 is another schematic block diagram of the device provided by the embodiment of the present application.
图16是本申请实施例提供的系统的示意性框图。Fig. 16 is a schematic block diagram of a system provided by an embodiment of the present application.
具体实施方式detailed description
下面将结合附图,对本申请中的技术方案进行描述。The technical solution in this application will be described below with reference to the accompanying drawings.
图1是本申请实施例提供的路径规划的方法的应用场景。在该应用场景中,可以包括车辆100和云端服务系统200,车辆100和云端服务系统200可以通过网络通信。FIG. 1 is an application scenario of the path planning method provided by the embodiment of the present application. In this application scenario, the vehicle 100 and the
车辆100的部分或所有功能受计算平台150控制。计算平台150可包括至少一个处理器151,处理器151可以执行存储在例如存储器152这样的非暂态计算机可读介质中的指令153。在一些实施例中,计算平台150还可以是采用分布式方式控制车辆100的个体组件或子系统的多个计算设备。处理器151可以是任何常规的处理器,诸如中央处理单元(centralprocessing unit,CPU)。替选地,处理器151还可以包括诸如图像处理器(graphic processunit,GPU),现场可编程门阵列(field programmable gate array,FPGA)、片上系统(system on chip,SOC)、专用集成芯片(application specific integrated circuit,ASIC)或它们的组合。Some or all functions of the vehicle 100 are controlled by the computing platform 150 . Computing platform 150 may include at least one
除了指令153以外,存储器152还可存储数据,例如道路地图、路线信息,车辆的位置、方向、速度以及其它这样的车辆数据,以及其他信息。这种信息可在车辆100在自主、半自主和/或手动模式中操作期间被车辆100和计算平台150使用。In addition to instructions 153, memory 152 may also store data such as road maps, route information, the vehicle's position, direction, speed, and other such vehicle data, among other information. Such information may be used by vehicle 100 and computing platform 150 during operation of vehicle 100 in autonomous, semi-autonomous, and/or manual modes.
应理解,图1中车辆的结构不应理解为对本申请实施例的限制。It should be understood that the structure of the vehicle in Fig. 1 should not be construed as limiting the embodiment of the present application.
可选地,上述车辆100可以为轿车、卡车、摩托车、公共汽车、船、飞机、直升飞机、割草机、娱乐车、游乐场车辆、施工设备、电车、高尔夫球车、火车等,本申请实施例不做特别的限定。Optionally, the above vehicle 100 may be a car, truck, motorcycle, bus, boat, plane, helicopter, lawn mower, recreational vehicle, playground vehicle, construction equipment, tram, golf cart, train, etc. The embodiments of the present application do not make special limitations.
另外,如图1所示的应用场景中还可以包括云端服务器。本申请实施例中,云端服务器可以在为车辆下发的路径信息中携带道路的信息以及车辆在道路上行驶时的规划时间信息。通过服务器下发规划时间信息可以使得车辆在每段道路上行驶时每段道路上车辆的总数量小于或者等于每段道路的容量,避免了车辆的总数量大于道路的容量而造成的道路拥挤,从而有助于避免车辆之间的冲突。In addition, the application scenario shown in FIG. 1 may also include a cloud server. In the embodiment of the present application, the cloud server may carry road information and planning time information when the vehicle is driving on the road in the route information delivered to the vehicle. The planning time information issued by the server can make the total number of vehicles on each road section less than or equal to the capacity of each road section when the vehicles are driving on each section of the road, avoiding road congestion caused by the total number of vehicles being greater than the capacity of the road. This helps to avoid collisions between vehicles.
一个实施例中,该云端服务器还可以通过虚拟机来实现。In an embodiment, the cloud server can also be realized by a virtual machine.
如前所述,现有针对车辆的路径规划技术分为两类,一类是类似于地图的提供道路级路径规划的方法,其服务对象是有人驾驶车辆。司机拥有最高决策权,地图会给车辆提供若干类型的最优路径,最终由司机自己选择,司机也可以选择一条与地图提供的路径都不相同的路径。另一类是自动驾驶车辆的路径规划,其服务对象是自动驾驶车辆。自动驾驶车辆存有高精地图,根据高精地图可以自己搜索最优路径。车辆的自动驾驶是基于博弈的思想。当前的路径规划技术主要是针对车辆本身,并不能避免车辆之间的冲突。As mentioned above, the existing path planning technologies for vehicles are divided into two categories. One is a method that provides road-level path planning similar to maps, and its service object is manned vehicles. The driver has the highest decision-making power. The map will provide the vehicle with several types of optimal routes, which are finally chosen by the driver himself. The driver can also choose a route that is different from the route provided by the map. The other type is path planning for autonomous vehicles, and its service object is autonomous vehicles. The self-driving vehicle has a high-precision map, and can search for the optimal route by itself according to the high-precision map. The automatic driving of the vehicle is based on the idea of the game. The current path planning technology is mainly aimed at the vehicle itself, and cannot avoid conflicts between vehicles.
鉴于此,本申请实施例提供了一种路径规划的方法和服务器,可以为多车协同分配道路资源和时间资源,并在下发给车辆的路径信息中携带位置、时间等信息,实现对车辆的强控制。通过服务器下发规划时间信息可以使得车辆在每段道路上行驶时每段道路上车辆的总数量小于或者等于每段道路的容量,避免了车辆的总数量大于道路的容量而造成的道路拥挤,从而有助于避免车辆之间的冲突,最终实现车辆之间有序通行或者作业,能够提升车辆的通行或者作业效率,降低人工操作成本。本申请实施例的技术方案可以适用于港口、矿山或者封闭园区等自动化驾驶场景中,也可以适用于城市道路通行的场景中,本申请实施例对具体的适用场景并不作限定。In view of this, the embodiment of the present application provides a method and server for route planning, which can allocate road resources and time resources for multi-vehicle coordination, and carry information such as location and time in the route information sent to vehicles, so as to realize the control of vehicles. strong control. The planning time information issued by the server can make the total number of vehicles on each road section less than or equal to the capacity of each road section when the vehicles are driving on each section of the road, avoiding road congestion caused by the total number of vehicles being greater than the capacity of the road. This helps to avoid conflicts between vehicles, and ultimately achieves orderly passage or operation between vehicles, which can improve the efficiency of vehicle passage or operation and reduce manual operation costs. The technical solutions of the embodiments of the present application can be applied to automated driving scenarios such as ports, mines, or closed parks, and can also be applied to urban road traffic scenarios. The embodiments of the present application do not limit the specific applicable scenarios.
图2示出了本申请实施例提供的系统的示意性框图。其中,该系统中包括上层应用(或平台)、协同驾驶地图模块、道路级协同路径规划模块、车道级精细化引导模块以及车辆。其中,上层应用可以部署在服务器上也可以部署在车辆上,可以通过用户界面(userinterface,UI)接收用户输入,如对任务信息,道路信息,车道信息等的设置。协同驾驶地图模块、道路级协同路径规划模块以及车道级精细化引导模块可以属于协同驾驶系统,协同驾驶系统向上对接服务器,向下对接车辆。Fig. 2 shows a schematic block diagram of a system provided by an embodiment of the present application. Among them, the system includes an upper layer application (or platform), a collaborative driving map module, a road-level collaborative path planning module, a lane-level refined guidance module, and vehicles. Wherein, the upper-layer application can be deployed on the server or on the vehicle, and can receive user input through a user interface (UI), such as setting task information, road information, and lane information. The collaborative driving map module, the road-level collaborative path planning module, and the lane-level refined guidance module can belong to the collaborative driving system, and the collaborative driving system is connected upward to the server and downward to the vehicle.
道路通常可以包括一根或多根车道。道路级路径可以指示车辆在对应道路上行驶,主要用于指示在交叉口处的行驶方向,一般不约束车辆在道路内的具体行为;车道级路径可以要求车辆在道路中的具体车道上行驶,不允许车辆随意超车、变道或跨车道行驶。A road can usually consist of one or more lanes. The road-level path can instruct the vehicle to drive on the corresponding road, mainly used to indicate the driving direction at the intersection, and generally does not restrict the specific behavior of the vehicle in the road; the lane-level path can require the vehicle to drive on a specific lane in the road, Vehicles are not allowed to overtake, change lanes or cross lanes at will.
应理解,协同驾驶地图模块、道路级协同路径规划模块以及车道级精细化引导模块可以属于同一个服务器(例如,协同驾驶系统);或者,协同驾驶地图模块可以属于一个服务器,道路级协同路径规划模块以及车道级精细化引导模块可以属于另一个服务器。或者,协同驾驶地图模块、道路级协同路径规划模块以及车道级精细化引导模块可以是不同的模块,也可以是两个模块,也可以是一个模块,或者部分模块功能也可以部署在其他服务器或者其他系统中,本申请实施例对此并不作限定。可以理解的是,上层应用部署在服务器上时,可以和协同驾驶地图模块、道路级协同路径规划模块以及车道级精细化引导模块中的一个或多个部署在同一服务器上,也可以部署在不同服务器上。It should be understood that the collaborative driving map module, the road-level collaborative path planning module, and the lane-level refined guidance module may belong to the same server (for example, a collaborative driving system); or, the collaborative driving map module may belong to one server, and the road-level collaborative path planning module The module as well as the Lane Level Refined Guidance module can belong to another server. Alternatively, the collaborative driving map module, the road-level collaborative path planning module, and the lane-level refined guidance module can be different modules, or two modules, or one module, or some module functions can also be deployed on other servers or In other systems, this embodiment of the present application does not limit it. It can be understood that when the upper layer application is deployed on the server, it can be deployed on the same server as one or more of the collaborative driving map module, the road-level collaborative path planning module, and the lane-level fine guidance module, or it can be deployed on different on the server.
上层应用(或平台)可以向协同驾驶地图模块提供道路和车道的属性,其中属性包括但不限于:The upper layer application (or platform) can provide road and lane attributes to the collaborative driving map module, where the attributes include but are not limited to:
(1)道路的可通行属性(1) Passability of the road
道路的可通行属性可以理解为该道路是否可通行,或者可通行时需要满足的条件。其中,可以根据以下一项或多项确定道路的可通行条件:车辆的目的地,车辆的任务类型,车辆的类型等。例如,某条道路在任何情况下都可以通行。又例如,只有最终目的地在该道路上的车辆可通行,该情况在生产环境中比较常见。如果一条道路上有生产设备,那么只有需要到该道路上进行作业的车辆可以驶入该道路,也可以说车辆的任务类型和道路上的作业类型相匹配,其余车辆只能选择绕行。又例如,某条道路只有特定类型的车辆,例如,特种车辆,消防车、救护车等可以通行。The traversable attribute of a road can be understood as whether the road is traversable, or the conditions that need to be met when it is traversable. Wherein, the traversable condition of the road can be determined according to one or more of the following: the destination of the vehicle, the task type of the vehicle, the type of the vehicle, and the like. For example, a certain road is passable under all circumstances. Another example is that only vehicles whose final destination is on the road can pass, which is common in production environments. If there is production equipment on a road, only vehicles that need to work on the road can drive into the road. It can also be said that the task type of the vehicle matches the operation type on the road, and the rest of the vehicles can only choose to detour. For another example, only certain types of vehicles, such as special vehicles, fire trucks, ambulances, etc., can pass on a certain road.
道路的可通行属性也可以包括道路等级,一种可能的实现方式中,车辆的类型也分别对应相应的车辆等级。当车辆等级高于或者等于道路等级时,车辆可以在该道路上行驶。例如,道路等级为0-3级,其中0级对车辆类型没有要求,也就是所有车辆都可以在道路上行驶,而车辆的不同类型对应了不同等级,普通车辆的等级为1级,其可以在道路等级为0或1的道路上行驶,但不能去道路等级为2或3的道路上行驶,特种车辆的等级较高,例如,消防车,救护车的等级为3,可以在所有道路上行驶。又例如,对于某一类型的车辆,其车辆的等级为2。那么这一类型的车辆可以在道路等级为0-2的道路上行驶,而不能在道路等级为3或者道路等级大于3的道路上行驶。The traversable attributes of the road may also include road grades, and in a possible implementation manner, vehicle types also correspond to corresponding vehicle grades. When the vehicle level is higher than or equal to the road level, the vehicle can drive on the road. For example, road grades are 0-3, where grade 0 has no requirements for vehicle types, that is, all vehicles can drive on the road, and different types of vehicles correspond to different grades. The grade of ordinary vehicles is
又一种可能的实现方式中,上层应用(或平台)下发车辆的任务信息或者车辆上传任务信息时,可以在任务信息中携带车辆的通行等级。当车辆的通行等级高于或者等于道路等级时,车辆可以在该道路上行驶。例如,车辆的通行等级为2,那么车辆可在在道路等级为0-2的道路上行驶,而不能在道路等级为3或者道路等级大于3的道路上行驶。又例如,车辆的通行等级为5且最高的道路等级也是5,那么服务器可以从所有的道路中为车辆选择从当前位置到任务目的地的路径。In yet another possible implementation manner, when the upper layer application (or platform) delivers the task information of the vehicle or the vehicle uploads the task information, the traffic level of the vehicle may be carried in the task information. When the traffic level of the vehicle is higher than or equal to the road level, the vehicle can drive on the road. For example, if the traffic level of the vehicle is 2, then the vehicle can run on roads with a road level of 0-2, but cannot drive on roads with a road level of 3 or greater than 3. For another example, if the traffic level of the vehicle is 5 and the highest road level is also 5, then the server can select a path from the current location to the task destination for the vehicle from all roads.
道路的可通行属性可以根据车辆的通行等级,车辆的类型,车辆的任务类型,车辆的任务目的地等中的一项或多项来确定,从而在规划路径时,可以相应确定允许车辆行驶的道路。The passable attribute of the road can be determined according to one or more of the vehicle's traffic level, vehicle type, vehicle task type, vehicle task destination, etc., so that when planning the route, the allowed vehicles can be determined accordingly. the way.
(2)道路、车道的可用性状态(2) Availability status of roads and lanes
道路、车道的可用性状态可以理解为道路、车道是否能通行,这与车辆、任务均无关,通常是由于安全问题导致的道路、车道关闭。当安全问题解除后,可以开启相关道路、车道。The availability status of roads and lanes can be understood as whether the roads and lanes are passable, which has nothing to do with vehicles or tasks. Usually, roads and lanes are closed due to safety issues. When the safety problem is resolved, the relevant roads and lanes can be opened.
(3)道路的容量(3) Capacity of the road
道路的容量可以作为决定多车系统路径规划中时间资源分配的参考。The capacity of the road can be used as a reference to determine the time resource allocation in the route planning of the multi-vehicle system.
道路的容量是指针对一条或者一段道路,在同一时刻可位于该道路上的车辆数量的上限。根据道路的容量进行时间资源分配,可以防止车辆扎推引起的锁死或者效率降低。道路的容量可以与该道路的长度、宽度、车道数等相关。例如,道路的车道数越多,那么道路的容量也可以越大;或者,道路的容量也可以与道路的业务属性相关;或者,道路的容量也可以与上层应用的引导能力相关,例如,上层应用能力越强,则道路上的车辆可以更密集而不发生锁死等情况。The capacity of a road refers to the upper limit of the number of vehicles that can be on the road at the same time for one or a section of road. Allocating time resources according to the capacity of the road can prevent locking or efficiency reduction caused by vehicles pushing. The capacity of a road may be related to the length, width, number of lanes, etc. of the road. For example, the more lanes a road has, the larger the capacity of the road can be; or, the capacity of the road can also be related to the business attribute of the road; or, the capacity of the road can also be related to the guidance capability of the upper layer application, for example, the upper The stronger the application capability, the denser the vehicles on the road without locking up and so on.
(4)车道的类型(4) Type of lane
车道的类型可以与业务需求相关,一般分为工作车道和超车道,即需要在某条工作车道上作业的车辆,可以在该工作车道上行驶;而仅仅途径该道路的车辆,可以在该道路下的超车道行驶。The type of lane can be related to business needs, generally divided into working lanes and overtaking lanes, that is, vehicles that need to work on a certain working lane can drive on the working lane; vehicles that only pass the road can drive on the road down the passing lane.
除此之外,还可以针对一些特殊需求或场景进行设置。例如,在港口场景下,车辆具有人字形调头功能。针对某些特殊任务,车辆需要在合适的位置实现人字形调头,则在为该车辆分配道路资源时,需要关注道路是否支持人字形调头。In addition, it can also be set for some special needs or scenarios. For example, in the port scene, the vehicle has a herringbone U-turn function. For some special tasks, the vehicle needs to realize a herringbone U-turn at a suitable position, so when allocating road resources to the vehicle, it is necessary to pay attention to whether the road supports a Herringbone U-turn.
图3示出了本申请实施例提供的路径规划的方法300的示意性流程图。该方法可以由车辆、云端服务器以及上层应用(或平台)执行,其中云端服务器包括路径规划模块和协同驾驶地图模块,该方法300包括:FIG. 3 shows a schematic flowchart of a
S301,路径规划模块获取协同驾驶地图模块发送的地图信息,该地图信息可以包括道路的拓扑关系。S301. The path planning module acquires map information sent by the collaborative driving map module, where the map information may include road topological relationships.
应理解,路径规划模块可以包括图2所示的道路级协同路径规划模块以及车道级精细化引导模块,协同驾驶地图模块可以为上述图2所示的协同驾驶地图模块。It should be understood that the route planning module may include the road-level coordinated route planning module and the lane-level refined guidance module shown in FIG. 2 , and the coordinated driving map module may be the coordinated driving map module shown in FIG. 2 above.
还应理解,路径规划模块获取协同驾驶地图模块发送的地图信息可以是云端服务器a中的路径规划模块从云端服务器b的协同驾驶地图模块获取地图信息;也可以是云端服务器a中的路径规划模块从云端服务器a的协同驾驶地图模块获取地图信息。图3是中是以路径规划模块和协同驾驶地图模块位于同一云端服务器中为例进行说明的。It should also be understood that the route planning module obtains the map information sent by the cooperative driving map module, which may be that the route planning module in cloud server a obtains map information from the cooperative driving map module of cloud server b; it may also be the route planning module in cloud server a Obtain map information from the collaborative driving map module of cloud server a. Figure 3 is an example in which the path planning module and the cooperative driving map module are located in the same cloud server.
地图信息包括地图路网的拓扑关系,即道路的上下游关系。根据道路的拓扑关系可以规划出一条从起点到终点的可行路径。The map information includes the topological relationship of the map road network, that is, the upstream and downstream relationship of the road. According to the topological relationship of the road, a feasible path from the start point to the end point can be planned.
一个实施例中,路径规划模块在从协同驾驶地图模块获取到地图信息后,可以将该地图信息保存在路径规划模块中。那么下一次路径规划模块在接收到任务信息后,就可以不用再从协同地图模块获取地图信息。In one embodiment, after the route planning module obtains the map information from the cooperative driving map module, the map information can be saved in the route planning module. Then the next time, after the path planning module receives the task information, it does not need to obtain the map information from the collaborative map module.
S302,路径规划模块获取任务信息。S302, the path planning module acquires task information.
一个实施例中,路径规划模块可以从上层应用(或平台)获取任务信息。例如,对于港口、矿山或者封闭园区等场景,可以通过区域中的调度中心向云端服务器下发车辆的任务信息,请求云端服务器为车辆进行路径规划。In one embodiment, the path planning module can obtain task information from an upper-layer application (or platform). For example, for scenarios such as ports, mines, or closed parks, the dispatch center in the area can send the task information of the vehicle to the cloud server, and request the cloud server to plan the path for the vehicle.
一个实施例中,路径规划模块也可以从车辆获取任务信息。例如,对于城市通行场景,车辆在出行时可以通过驾驶员的操作触发车辆向云端服务器上传任务信息并申请路径规划。In one embodiment, the path planning module can also obtain task information from the vehicle. For example, for urban traffic scenarios, the driver's operation can trigger the vehicle to upload mission information to the cloud server and apply for route planning when traveling.
一个实施例中,任务信息中可以包括静态信息和动态信息。其中,静态信息包括但不限于任务目的地、通行等级、车辆的固有属性等。其中,任务目的地、通行等级以及车辆的固有属性均可以与道路的可通行属性结合使用,从道路的通行规则来判断是否允许车辆通行,例如,当通行等级大于某条或者某段道路的道路等级时,车辆可以在该条或者该段道路上通行。车辆的固有属性可以包括以下一项或多项:车辆类型,车高、车宽等尺寸信息以及最小转弯半径、最大爬升坡度等机动能力信息,车牌信息(某些根据车牌限行的场景,例如,车牌的尾号或者车辆所属地区或者省份)等,根据这些信息可以从车辆的角度判断道路能否满足车辆行驶条件,例如,不允许大车通行、限高、限宽、转弯过急、坡度较陡等。静态信息主要用于给车辆分配空间资源(道路资源)。In an embodiment, the task information may include static information and dynamic information. Among them, the static information includes but is not limited to task destination, traffic level, inherent attributes of the vehicle, and the like. Among them, task destination, traffic level, and inherent attributes of vehicles can all be used in combination with the passable attributes of roads, and whether vehicles are allowed to pass is judged from the traffic rules of the road, for example, when the traffic level is greater than a certain road or a certain section When the grade is selected, vehicles can pass on this road or this section of road. The inherent attributes of the vehicle can include one or more of the following: vehicle type, size information such as vehicle height and width, and maneuverability information such as minimum turning radius and maximum climbing slope, license plate information (some scenes that restrict traffic based on license plates, for example, The tail number of the license plate or the region or province to which the vehicle belongs), etc., based on this information, it can be judged from the perspective of the vehicle whether the road meets the driving conditions of the vehicle, for example, large vehicles are not allowed, height restrictions, width restrictions, sharp turns, steep slopes, etc. steep etc. Static information is mainly used to allocate space resources (road resources) to vehicles.
一个实施例中,车辆在城市场景中行驶的过程中向服务器发送的任务信息中可以包括任务目的地以及车辆的固有属性。In one embodiment, the task information sent by the vehicle to the server during driving in the urban scene may include the task destination and the inherent attributes of the vehicle.
一个实施例中,该任务信息中也可以不包括任务目的地而是包括任务目的,例如任务目的为充电且任务信息中未指定充电桩的位置时,云端服务器可以为车辆选择一个可用的充电桩。云端服务器可以将导航信息发送给车辆,导航信息中可以包括任务ID以及任务目的地,其中任务ID用于车辆校验路径信息是否存在问题。In one embodiment, the task information may not include the task destination but include the task purpose, for example, when the task purpose is charging and the location of the charging pile is not specified in the task information, the cloud server can select an available charging pile for the vehicle . The cloud server can send the navigation information to the vehicle, and the navigation information can include the task ID and the task destination, wherein the task ID is used for the vehicle to check whether there is a problem with the route information.
动态信息可以包括车辆的任务优先级,主要用于给车辆分配时间资源。不同于静态信息,动态信息不仅会影响其所属车辆,也会影响其他相关车辆。例如,两辆或多车辆同时在道路上行驶时,根据其任务优先级为其分配每辆车在每段道路上的时间窗,优先级越高,则在分配时间资源时,该车辆拥有越高的权重,即优先满足高优先级车辆的任务需求。当两辆车的时间资源分配出现冲突时,通常是调整低优先级车辆的时间。The dynamic information can include the task priority of the vehicle, which is mainly used to allocate time resources to the vehicle. Unlike static information, dynamic information will not only affect the vehicle it belongs to, but also other related vehicles. For example, when two or more vehicles are driving on the road at the same time, each vehicle is assigned a time window on each road section according to its task priority. The higher the priority, the more time the vehicle has when allocating time resources. A high weight means that the mission requirements of high-priority vehicles are met first. When there is a conflict in the time resource allocation of two vehicles, it is usually the time to adjust the time of the lower priority vehicle.
例如,某条道路上的容量是1,任务优先级高的车辆在T1时刻要进入该道路且在T2时刻离开该道路。此时如果任务优先级低的另一辆车准备在T3时刻驶入该道路(T3可以是T1和T2之间的一个时刻),那么云端可以指示其降低速度,以保证其在T2时刻之后再进入该道路。For example, if the capacity on a road is 1 , vehicles with high task priority will enter the road at time T1 and leave the road at time T2. At this time, if another vehicle with a low task priority is ready to enter the road at time T3 ( T3 can be a time between T1 and T2 ) , the cloud can instruct it to reduce its speed so as to ensure Enter the road after time T2 .
一个实施例中,车辆的任务优先级可以是在动态信息中获取的,也可以是从静态信息中获取的。例如,静态信息中的车辆的固有属性中可以包括车辆的类型。例如,云端服务器中可以保存车辆的类型与车辆的任务优先级的对应关系,如救护车、消防车等特种车辆对应最高任务优先级。In an embodiment, the task priority of the vehicle may be obtained from dynamic information, or may be obtained from static information. For example, the inherent attributes of the vehicle in the static information may include the type of the vehicle. For example, the cloud server can store the correspondence between vehicle types and vehicle task priorities, such as ambulances, fire trucks and other special vehicles corresponding to the highest task priority.
S303,路径规划模块根据任务信息,确定可行路径,该可行路径中包括一段或者多段道路。S303. The path planning module determines a feasible path according to the task information, and the feasible path includes one or more road sections.
一个实施例中,路径规划模块可以根据任务信息中的静态信息以及道路、车道的固有属性,来确定可行路径。In one embodiment, the path planning module can determine the feasible path according to the static information in the task information and the inherent attributes of roads and lanes.
示例性的,道路、车道类型可以包括道路、车道的固有属性,例如,宽度、坡度、曲率等。这一类属性可以通过高精地图采图时获取,在道路翻修时会进行更新。路径规划模块可以结合车辆的固有属性以及道路、车道的固有属性,来确定可行路径。例如,该一段或者多段道路中的每段道路的坡度需要小于或者的等于车辆的最大爬升坡度;又例如,该一段或者多段道路中每段道路中车道的宽度需要大于或者等于车辆的宽度。Exemplarily, the road and lane types may include inherent attributes of roads and lanes, such as width, slope, and curvature. This type of attribute can be obtained through high-precision map collection, and will be updated during road renovation. The path planning module can combine the inherent attributes of the vehicle and the inherent attributes of roads and lanes to determine feasible paths. For example, the gradient of each section of road in one or more sections of road needs to be less than or equal to the maximum climbing slope of the vehicle; for another example, the width of the lane in each section of road in one or more sections of road needs to be greater than or equal to the width of the vehicle.
一个实施例中,路径规划模块可以根据任务信息中的静态信息以及道路、车道的业务属性,来确定可行路径。In one embodiment, the path planning module can determine the feasible path according to the static information in the task information and the business attributes of roads and lanes.
示例性的,道路、车道的业务属性可以包括道路的可通行属性、可转向属性以及专用道路车道属性(例如,公交车专用车道)。路径规划模块可以根据静态信息中的通行等级以及道路的可通行属性中的道路等级,来确定可行路径。该一段或者多段道路中的每段道路的道路等级小于或者等于通行等级。Exemplarily, the business attributes of roads and lanes may include passable attributes, steerable attributes, and special road lane attributes (for example, bus lanes) of the road. The path planning module can determine the feasible path according to the traffic level in the static information and the road level in the passable attribute of the road. The road class of each road segment in the one or more road segments is less than or equal to the traffic class.
一个实施例中,路径规划模块可以根据任务信息中的静态信息以及道路、车道的可用性状态,来确定可行路径。In one embodiment, the path planning module can determine the feasible path according to the static information in the task information and the availability status of roads and lanes.
示例性的,道路、车道的可用性状态可以使用可用(OPEN)和不可用(CLOSE)来描述。例如,在生产作业场景下,有车辆故障或者有物品掉落,为例保证车辆安全,通常需要把相关区域禁行,从而对应道路、车道的可用性状态置为CLOSE;在城市环境中,通常是因为修路等原因,用护栏将相关道路、车道围起来,从而对应道路、车道的可用性状态置为CLOSE。路径规划模块可以确定该一段或者多段道路中的每段道路的可用性状态可以均为OPEN。Exemplarily, the availability status of roads and lanes can be described by using (OPEN) and unavailable (CLOSE). For example, in a production operation scenario, if there is a vehicle failure or an item falls, as an example to ensure the safety of the vehicle, it is usually necessary to ban the relevant area, so that the availability status of the corresponding road and lane is set to CLOSE; in an urban environment, it is usually Due to road construction and other reasons, the relevant roads and lanes are surrounded by guardrails, so that the availability status of the corresponding roads and lanes is set to CLOSE. The route planning module may determine that the availability status of each road segment in the one or more road segments may be OPEN.
应理解,道路、车道的业务属性可以根据业务需求通过调用地图接口进行配置。It should be understood that the business attributes of roads and lanes can be configured by calling the map interface according to business requirements.
还应理解,路径规划模块可以结合任务信息以及多个参数来确定可行路径。该多个参数可以包括道路、车道的固有属性,道路、车道的业务属性,道路、车道的可用性状态中至少两个。It should also be understood that the path planning module can combine task information and multiple parameters to determine a feasible path. The plurality of parameters may include at least two of inherent attributes of roads and lanes, service attributes of roads and lanes, and usability status of roads and lanes.
一个实施例中,路径规划模块也可以不从协同驾驶地图模块获取地图信息,而是在获取到任务信息后,将任务信息中的任务目的地或者根据任务信息中的任务目的规划出的任务目的地发送给协同驾驶地图模块。协同驾驶地图模块可以根据车辆当前的位置信息以及任务目的地为车辆规划可行路径,并将该可行路径的信息发送给路径规划模块。这样就无需在路径规划模块中保存地图信息,有助于降低路径规划模块中的存储开销。In one embodiment, the path planning module may not obtain map information from the cooperative driving map module, but after obtaining the task information, the task destination in the task information or the task purpose planned according to the task purpose in the task information sent to the collaborative driving map module. The cooperative driving map module can plan a feasible path for the vehicle according to the current location information of the vehicle and the mission destination, and send the information of the feasible path to the path planning module. In this way, there is no need to store map information in the path planning module, which helps to reduce storage overhead in the path planning module.
S304,路径规划模块从协同驾驶地图模块获取该一段或者多段道路中每段道路的容量信息。S304, the path planning module acquires the capacity information of each road segment in the one or more road segments from the cooperative driving map module.
S305,根据每段道路的容量信息,确定车辆在每段道路上行驶的规划时间信息。S305. According to the capacity information of each road segment, determine the planned time information for the vehicle to travel on each road segment.
为了实现多车的协同路径规划,可以给每辆车分配时间资源。时间资源分配需要满足容量约束。图4示出了道路分段以及关键节点的示意图。In order to realize multi-vehicle collaborative path planning, time resources can be assigned to each vehicle. Time resource allocation needs to satisfy capacity constraints. Fig. 4 shows a schematic diagram of road segments and key nodes.
容量描述的对象是一条或者一段道路。如图3所示,黑点即为关键节点。两个关键节点之间为一条或者一段道路,该条道路或者该段道路的容量可用同一个参数描述。示例性的,一条道路的起点和终点可以为关键节点。对于较短的道路来说,其整个道路的容量可用一个道路容量描述;对于较长道路来说,为了提升管理效率,需要在合适位置增加关键节点。例如,图3所示的第三条道路,由于其长度较长,则在合适位置设置关键节点,将其划分为多段,每一段均有一个容量。The object described by the capacity is a road or a section of road. As shown in Figure 3, the black dots are key nodes. There is a road or a section of road between two key nodes, and the capacity of this road or this section of road can be described by the same parameter. Exemplarily, the starting point and the ending point of a road may be key nodes. For shorter roads, the capacity of the entire road can be described by one road capacity; for longer roads, in order to improve management efficiency, it is necessary to add key nodes at appropriate locations. For example, the third road shown in Figure 3, because of its long length, set key nodes at appropriate positions and divide it into multiple sections, each section has a capacity.
在为车辆分配时间资源时,路径规划模块可以根据车辆途径的所有道路以及每段道路的道路容量,为每个关键节点规划达到时间。图5示出了为一条或者一段道路分配时间资源的示意图。如图5所示,横轴为时间,每一个矩形框均表示一辆车通过该条道路或者该段道路的时间窗,矩形框左侧边对应的时刻为该车辆到达该道路起点的时刻,矩形框右侧边对应的时间即为该车辆到达该道路终点的时刻。从时间轴上看,在任一时刻,对应的矩形框均不超过3个,即说明在任一时刻,该道路上的车辆数量均不超过3辆。如果该道路的容量为3或者更大,则该时间资源分配结果满足容量要求。When allocating time resources for vehicles, the path planning module can plan the arrival time for each key node according to all the roads that the vehicle passes and the road capacity of each road segment. Fig. 5 shows a schematic diagram of allocating time resources for one or a section of roads. As shown in Figure 5, the horizontal axis is time, and each rectangular frame represents the time window for a vehicle to pass through the road or the road section, and the time corresponding to the left side of the rectangular frame is the moment when the vehicle arrives at the starting point of the road. The time corresponding to the right side of the rectangular frame is the moment when the vehicle reaches the end of the road. From the perspective of the time axis, at any moment, there are no more than three corresponding rectangular boxes, which means that at any moment, the number of vehicles on the road does not exceed three. If the capacity of the road is 3 or greater, the time resource allocation result meets the capacity requirement.
如果不满足容量要求(例如,在某个时刻道路上的车辆数量大于该道路的容量),则路径规划模块可以根据车辆的任务优先级排序。对优先级较低的车辆的时间窗进行调整,例如延后其驶入该道路的时刻,或者提前其驶出该道路的时刻。If the capacity requirement is not met (for example, the number of vehicles on the road at a certain moment is greater than the capacity of the road), the path planning module can prioritize the tasks of the vehicles. Adjust the time window for vehicles with lower priority, such as delaying the time when they enter the road, or advancing the time when they leave the road.
在为车辆分配完空间资源和时间资源后,可以给车辆规划详细的路径信息。示例性的,路径规划模块发送给车辆的路径信息可以通过一系列点集来描述,这些点可以包括但不限于以下几类信息:After the space resources and time resources are allocated to the vehicle, detailed route information can be planned for the vehicle. Exemplarily, the route information sent by the route planning module to the vehicle can be described by a series of point sets, and these points can include but not limited to the following types of information:
(1)位置信息(1) Location information
位置信息为常规信息。位置信息可以通过点的坐标描述,也可以通过道路和车道ID来描述。Location information is general information. Location information can be described by point coordinates, or by road and lane IDs.
其中,点的坐标可以通过经度和纬度来描述;或者,点的坐标也可以通过本地坐标系中坐标来描述。例如,对于港口场景,可以为港口建立一个坐标系。该坐标系可以保存于云端服务器以及车辆中,当车辆接收到该坐标系中点的坐标后,就可以确定该点的位置信息。Wherein, the coordinates of the point can be described by longitude and latitude; or, the coordinates of the point can also be described by the coordinates in the local coordinate system. For example, for a port scene, a coordinate system can be established for the port. The coordinate system can be saved in the cloud server and the vehicle, and when the vehicle receives the coordinates of the center point of the coordinate system, it can determine the position information of the point.
(2)速度、时间信息(2) Speed and time information
速度、时间信息为车辆在行驶过程中,在规划路径中的规定时间到达对应的路径点。通过这类信息,可以保证在空间和时间上的一致性,保证车辆能够按照云端服务器下发的路径点有效行驶,从而保证云端服务器规划的有效性。The speed and time information is that the vehicle arrives at the corresponding waypoint at the specified time in the planned route during the driving process. Through this kind of information, the consistency in space and time can be guaranteed, and the vehicle can be effectively driven according to the waypoint issued by the cloud server, thereby ensuring the effectiveness of cloud server planning.
(3)车辆的行驶模式(3) Driving mode of the vehicle
为了适应不同作业环境,相对于乘用车,商用车可以有更多的行驶模式(或者,控制模式),常见的两类行驶模式包括自然转弯模式和蟹行模式。In order to adapt to different operating environments, commercial vehicles can have more driving modes (or control modes) than passenger vehicles. The two common driving modes include natural turning mode and crab driving mode.
图6示出了自然转弯模式的示意图。自然转弯模式即常见转弯模式,绝大部分乘用车采用这种方式。Fig. 6 shows a schematic diagram of a natural turning mode. The natural turning mode is a common turning mode, which is adopted by most passenger cars.
一个实施例中,自然转弯模式还可以包括三个子模式,第一子模式可以是前后车轮一起转动其往不同的方向转动;第二子模式可以是前轮转动且后轮不转动;第三子模式可以是后轮不转动且前轮转动。In one embodiment, the natural turning mode can also include three sub-modes. The first sub-mode can be that the front and rear wheels rotate together and turn in different directions; the second sub-mode can be that the front wheels rotate and the rear wheels do not rotate; the third sub-mode The mode can be that the rear wheels do not turn and the front wheels turn.
图7示出了蟹行模式的示意图。蟹行模式是一类商用车的特有模式。在蟹行模式下,车辆前轮、后轮同时向相同方向转动,变道时车辆航向角保持不变,车身扫过面积相对更小。但是该模式要求前后车道的航向角一致,不如自然转弯模式灵活,常用于变道场景。Fig. 7 shows a schematic diagram of the crab pattern. The crab mode is a unique mode for a class of commercial vehicles. In crab driving mode, the front and rear wheels of the vehicle turn in the same direction at the same time, the heading angle of the vehicle remains unchanged when changing lanes, and the sweeping area of the vehicle body is relatively smaller. However, this mode requires the same heading angle of the front and rear lanes, which is not as flexible as the natural turning mode, and is often used in lane changing scenarios.
由于云端服务器相对于车辆拥有更全的信息,因此通过云端服务器给车辆制定行驶模式,可以帮助车辆更有效的完成路径跟踪。行驶模式的考虑因素包括变道前后的航向角是否一致、可变道长度以及障碍物信息等。示例性的,如果变道前后车道航向角要求一致,则可以使用蟹行模式。示例性的,当车辆需要跨多车道变更车道,则可以使用自然转弯模式。Since the cloud server has more complete information than the vehicle, formulating a driving mode for the vehicle through the cloud server can help the vehicle complete path tracking more effectively. The driving mode considerations include whether the heading angle before and after the lane change is consistent, the length of the variable lane, and obstacle information. Exemplarily, if the heading angle of the lane before and after the lane change is required to be the same, the crab mode can be used. Exemplarily, when the vehicle needs to change lanes across multiple lanes, the natural turning mode can be used.
S306,路径规划模块向车辆发送路径信息,该路径信息中包括该一段或者多段道路的信息以及车辆在该一段或者多段道路上行驶的规划时间信息。S306, the route planning module sends route information to the vehicle, and the route information includes the information of the one or more road segments and the planned time information of the vehicle traveling on the one or more road segments.
示例性的,图8示出了本申请实施例中路径规划模块向车辆下发的路径信息的示意图。图8所示的路径信息中包括关键路径点1-9。在每个关键路径点处通常会伴随着速度或者行驶模式的变化。以图8中所示的关键路径点1-5为例,这5个关键路径点的信息可以如表1所示。Exemplarily, FIG. 8 shows a schematic diagram of route information delivered to vehicles by the route planning module in the embodiment of the present application. The path information shown in FIG. 8 includes key path points 1-9. At each critical path point there is usually a change in speed or driving mode. Taking critical path points 1-5 shown in FIG. 8 as an example, the information of these five critical path points can be shown in Table 1.
表1 关键路径点的信息Table 1 Information of key path points

其中,STRAIGHT表示直行模式,LANCECHANG表示蟹行模式,TURN表示自然转弯模式。Among them, STRAIGHT means straight mode, LANCECHANG means crab mode, TURN means natural turning mode.
关键路径点1即为整条路径的起点,所以其速度为0。从关键路径点1到关键路径点2之间的路径为加速,关键路径点2到关键路径点3之间的路径为匀速,因此以关键路径点2为界,其两侧的速度模式不同,所以关键路径点2为关键节点。同时由于关键路径点2到关键路径点3为匀速行驶,所以关键路径点3的速度与关键路径点2的一致,则关键路径点3的速度信息可以不给,直接继承关键路径点2的速度信息。以关键路径点3为界,之前为直线行驶,之后为蟹行变道,因此关键路径点3也是一个关键节点。同理,行驶模式也有继承的特性。Key path point 1 is the starting point of the entire path, so its speed is 0. The path from critical path point 1 to critical path point 2 is acceleration, and the path from critical path point 2 to critical path point 3 is a constant speed. Therefore, with critical path point 2 as the boundary, the speed patterns on both sides are different. So key path point 2 is a key node. At the same time, since critical path point 2 to critical path point 3 travel at a constant speed, so the speed of critical path point 3 is consistent with that of
一个实施例中,该路径信息中还包括任务ID,车辆可以将该路径信息中的任务ID和导航信息中的任务ID进行匹配,如果匹配成功,则车辆可以确定该路径信息是针对该车辆的任务信息。In one embodiment, the route information also includes a task ID, and the vehicle can match the task ID in the route information with the task ID in the navigation information. If the matching is successful, the vehicle can determine that the route information is for the vehicle. Task information.
本申请实施例中,云端服务器在给车辆下发位置信息的同时也会下发时间信息,从空间和时间两个维度对车辆的行驶进行控制,保证云端服务器对多车协同路径规划的有效性,避免了车辆之间发生冲突,有效地提升了车辆作业或者通行的效率。In the embodiment of this application, the cloud server will also send time information when sending location information to the vehicle, and control the driving of the vehicle from the two dimensions of space and time, so as to ensure the effectiveness of the cloud server for multi-vehicle collaborative path planning , to avoid conflicts between vehicles, and effectively improve the efficiency of vehicle operations or traffic.
图9示出了本申请实施例提供的路径规划的方法900的示意性流程图。该方法可以由车辆和云端服务器执行,其中云端服务器包括路径规划模块和协同驾驶地图模块,该方法900包括:FIG. 9 shows a schematic flowchart of a
S901,车辆向云端服务器发送任务信息。S901. The vehicle sends mission information to a cloud server.
应理解,该任务信息的描述可以参考上述实施例中的描述,此处不再赘述。It should be understood that for the description of the task information, reference may be made to the description in the foregoing embodiments, and details are not repeated here.
S902,云端服务器根据任务信息,向车辆发送导航信息。S902. The cloud server sends navigation information to the vehicle according to the task information.
云端服务器在接收任务信息后,首先判断该任务信息是否合法,如果合法则生成任务ID,用于区分其他车辆的任务以及在下发路径时进行匹配;否则拒绝路径规划申请。如果该任务没有指定终点,则根据其任务目的为其选择一个终点,例如任务目的为充电,且未指定充电桩时,云端可以为其选择一个可用的充电桩。最后云端将导航信息发送至车端。After receiving the task information, the cloud server first judges whether the task information is legal, and if it is legal, generates a task ID, which is used to distinguish the tasks of other vehicles and match when sending routes; otherwise, it rejects the route planning application. If the task does not specify an end point, select an end point for it according to its task purpose. For example, if the task purpose is charging and no charging point is specified, the cloud can select an available charging point for it. Finally, the cloud sends the navigation information to the car terminal.
本申请实施例中,考虑到云端服务器下发的路径信息中的最终目的地可能与任务信息中的任务目的地不一致(例如,任务信息中携带的任务目的地为位置a,而云端服务器确定从车辆当前位置到位置a的可行路径中有障碍物,则云端服务器可能会在给车辆下发的路径信息中携带最终目的地为临时停车位置b的信息),这样就需要车辆通过导航信息中的任务ID以及路径信息中的任务ID来判断该路径信息其实就是针对车辆的路径信息,从而车辆可以根据车辆下发的路径信息执行作业或者行驶任务。In this embodiment of the present application, it is considered that the final destination in the path information issued by the cloud server may be inconsistent with the task destination in the task information (for example, the task destination carried in the task information is location a, and the cloud server determines that the task destination from If there are obstacles in the feasible path from the current position of the vehicle to position a, the cloud server may carry the information that the final destination is temporary parking position b in the route information sent to the vehicle), so that the vehicle needs to pass through the navigation information. The task ID and the task ID in the route information are used to determine that the route information is actually the route information for the vehicle, so that the vehicle can perform operations or travel tasks according to the route information issued by the vehicle.
S903,云端服务器向车辆发送路径信息。S903, the cloud server sends route information to the vehicle.
应理解,云端服务器根据任务信息确定路径信息的过程可以参考上述实施例中的描述,此处不再赘述。It should be understood that, for the process of the cloud server determining path information according to the task information, reference may be made to the description in the foregoing embodiments, and details are not repeated here.
S904,车辆对该路径信息进行校验。S904, the vehicle verifies the route information.
车辆在接收到路径信息时,可以校验路径信息是否存在问题。如果有问题,则需要上报云端,申请重规划路径。校验内容包括但不限于以下:When the vehicle receives the route information, it can check whether there is a problem with the route information. If there is a problem, you need to report to the cloud and apply for re-planning the route. Verification content includes but is not limited to the following:
(1)导航信息中的任务ID与路径信息中的任务ID是否一致。(1) Whether the task ID in the navigation information is consistent with the task ID in the route information.
(2)导航信息中的任务目的地与路径信息中的终点是否一致。该项为可选项,因为在一些场景下,平台可能会为车辆下发一段较短的导航路径。例如,由于前方有障碍车,车辆需要临时停一下,则先下发车辆从当前位置到临时停车点的路径。待障碍车离开后,可下发从该临时停车道到目标终点的路径信息。在该场景下,导航信息中的任务目的地与路径信息中的终点不一定一致。(2) Whether the task destination in the navigation information is consistent with the end point in the route information. This item is optional, because in some scenarios, the platform may issue a short navigation path to the vehicle. For example, if the vehicle needs to stop temporarily because there is an obstacle in front of it, the route of the vehicle from the current position to the temporary parking point will be issued first. After the obstacle car leaves, the path information from the temporary parking lane to the target end point can be issued. In this scenario, the task destination in the navigation information is not necessarily consistent with the end point in the route information.
(3)规划路径点位置信息是否存在错误,例如,路径中存在折返点,或路径中存在位置突变的点。(3) Whether there is any error in the location information of the planning path point, for example, there is a turning point in the path, or there is a point with a sudden change in the path.
应理解,路径信息中指示关联路径点1至关键路径点2和关联路径点2至关键路径点3之间车辆均是直线行驶。若车辆确定路径信息中关键路径点2的坐标并不在关键路径点1和关联路径点3的连线上,那么车辆可以确定关键路径点2为位置突变的点。It should be understood that the path information indicates that the vehicle travels in a straight line between the associated
(4)路径信息中的时间信息是否存在错误。例如,下游路径点要求到达的时间早于上游路径点要求到达的时间,或某一路径点要求到达时间早于当前时间,那么车辆可以确定该路径信息存在问题。(4) Whether there is an error in the time information in the route information. For example, if the required arrival time of the downstream waypoint is earlier than the required arrival time of the upstream waypoint, or the required arrival time of a certain waypoint is earlier than the current time, then the vehicle can determine that there is a problem with the route information.
(5)路径信息中的行驶模式是否存在错误。(5) Whether there is an error in the driving mode in the route information.
例如,路径信息中一段变道的路径指示的行驶模式为蟹行模式,但是其变道前后车道的航向角不一致,或根据车辆的机动能力约束无法切换至该行驶模式,那么车辆可以确定该路径信息存在问题。For example, if the driving mode indicated by a lane-changing route in the route information is crab driving mode, but the heading angles of the lanes before and after the lane change are inconsistent, or the driving mode cannot be switched to this driving mode according to the vehicle’s maneuverability constraints, then the vehicle can determine the route There is a problem with the information.
一个实施例中,若车辆通过校验确定路径信息存在问题,那么车辆可以停车并向云端服务器发送校验结果。In one embodiment, if the vehicle determines that there is a problem with the route information through the verification, the vehicle can stop and send the verification result to the cloud server.
图10示出了本申请实施例提供的路径规划的方法1000的示意性流程图。该方法可以由车辆、云端服务器和上层应用(或平台)执行,该方法1000包括:FIG. 10 shows a schematic flowchart of a
S1001,上层应用(或平台)向云端服务器发送任务信息,该任务信息中指示车辆需要实现人字形调头。S1001. The upper-layer application (or platform) sends task information to the cloud server, and the task information indicates that the vehicle needs to perform a herringbone U-turn.
图11示出了人字形调头的示意图,某些连接路同时具有自然转弯和人字形调头的功能。不同于乘用车,在生产环境中,部分商用车具有双向行驶的能力(例如,自动导引运输车(automated guided vehicle,AGV))。为了完成特殊任务,需要车辆在整条路径中实现调头。在规划路径时,云端服务器可以为车辆选择合适的位置实现人字形调头。Fig. 11 shows a schematic diagram of a herringbone U-turn, and some connecting roads have both the functions of a natural turn and a herringbone U-turn. Unlike passenger cars, some commercial vehicles have the ability to drive in both directions in a production environment (for example, automated guided vehicles (AGV)). In order to complete a special task, the vehicle needs to make a U-turn along the entire path. When planning a path, the cloud server can select a suitable location for the vehicle to realize a herringbone U-turn.
一个实施例中,任务信息中的任务目的中可以包括用于指示车辆需要实现人字形调头的信息。In an embodiment, the task purpose in the task information may include information indicating that the vehicle needs to perform a chevron turn.
S1002,云端服务器根据任务信息,确定可行路径,该可行路径中的一段或者多段道路可以用于人字形调头。S1002. The cloud server determines a feasible path according to the task information, and one or more sections of roads in the feasible path can be used for a herringbone U-turn.
一个实施例中,云端服务器可以根据任务信息以及道路的固有属性,来为车辆规划可行路径。可行路径中可以包括一段或者多段道路,该一段或者多段道路可以用于人字形调头。In one embodiment, the cloud server can plan a feasible route for the vehicle according to the task information and the inherent attributes of the road. The feasible path may include one or more sections of roads, and the one or more sections of roads may be used for a herringbone U-turn.
S1003,云端服务器向上层应用发送该可行路径以及该可行路径中的一段或者多段道路的信息。S1003. The cloud server sends information about the feasible path and one or more road sections in the feasible path to the upper layer application.
当上层应用接收到该可行路径以及该可行路径中的一段或者多段道路的信息后,可以通过UI提示用户该可行路径以及该可行路径中的一段或者多段道路的信息。用户可以从该一段或者多段道路中选择某一段道路,该段道路可以用于车辆人字形调头。After the upper-layer application receives information about the feasible route and one or more road segments in the feasible route, it may prompt the user with information about the feasible route and one or more road segments in the feasible route through the UI. The user can select a certain section of road from the section or multiple sections of road, and this section of road can be used for the vehicle to make a herringbone U-turn.
S1004,上层应用向云端服务器发送第一道路的信息,该第一道路为车辆进行人字形调头的道路。S1004, the upper layer application sends the information of the first road to the cloud server, and the first road is a road on which the vehicle performs a herringbone U-turn.
一个实施例中,若S1002中云端服务器确定可行路径中只有一段道路可以用于人字形调头,那么云端服务器也可以直接执行S1005。In one embodiment, if the cloud server in S1002 determines that only a segment of the feasible path can be used for a herringbone U-turn, then the cloud server may also directly execute S1005.
S1005,云端服务器根据该可行路径以及该第一道路的信息,确定路径信息。S1005. The cloud server determines route information according to the feasible route and the information of the first road.
示例性的,图12示出了本申请实施例中路径规划模块向车辆下发的路径信息的示意图。图12所示的路径信息中包括关键路径点1-10。在每个关键路径点处通常会伴随着速度或者行驶模式的变化。以图12中所示的关键路径点1-6为例,这6个关键路径点的信息可以如表2所示。Exemplarily, FIG. 12 shows a schematic diagram of route information delivered to vehicles by the route planning module in the embodiment of the present application. The route information shown in FIG. 12 includes key route points 1-10. At each critical path point there is usually a change in speed or driving mode. Taking critical path points 1-6 shown in FIG. 12 as an example, the information of these six critical path points can be shown in Table 2.
表2 关键路径点的信息Table 2 Information of key path points

在关键路径点6处,云端服务器指示车辆进行人字形调头。那么车辆在行驶至关键路径点6时,可以校验关键路径点5到关键路径点6的这一段道路上在关键路径点6处的路径航向角以及关键路径点6到关键路径点7的这一段道路上在点关键路径点6处的路径航向角。如果路径导航角相差大于或者等于预设角度(例如,180°),那么车辆可以确定在关键路径点6实现了人字形调头。否则,车辆可以认为对该路径信息的校验存在问题,车辆可以向云端服务器上报校验结果。At critical path point 6, the cloud server instructs the vehicle to perform a herringbone U-turn. Then when the vehicle travels to the critical path point 6, it can check the path heading angle at the critical path point 6 on the road from the critical path point 5 to the critical path point 6 and the distance between the critical path point 6 and the
应理解,对于关键路径点1-5的描述可以参考上述对表1中关键路径点1-5的描述,此处不再赘述。It should be understood that for the description of the key path points 1-5, reference may be made to the above description of the key path points 1-5 in Table 1, and details are not repeated here.
S1006,云端服务器向车辆发送该路径信息。S1006, the cloud server sends the route information to the vehicle.
车辆在接收到云端服务器发送的路径信息后,可以根据该路径信息进行作业或者通行。After the vehicle receives the route information sent by the cloud server, it can operate or pass according to the route information.
S1007,云端服务器向上层应用发送该路径信息。S1007. The cloud server sends the path information to the upper layer application.
上层应用在接收到该路径信息后,可以通过UI向用户提示该路径信息。After receiving the path information, the upper application may prompt the user with the path information through the UI.
应理解,S1006和S1007并,没有实际的先后顺序。It should be understood that S1006 and S1007 are not in an actual sequence.
图13示出了本申请实施例提供的一种路径规划的方法1300的示意性流程图。该方法1300可以由第一服务器和车辆执行,该方法1300包括:FIG. 13 shows a schematic flowchart of a
S1301,第一服务器获取第一路径,该第一路径为从车辆当前位置到任务目的地的路径,该第一路径包括一段或者多段道路。S1301. The first server obtains a first route, where the first route is a route from the current position of the vehicle to the task destination, and the first route includes one or more road segments.
可选地,该第一服务器获取第一路径之前,该方法还包括:该第一服务器获取任务信息,该任务信息包括用于指示该任务目的地的信息。任务目的地可以是任务的终点目的地,第一路径是车辆当前位置到任务的最终目的地的路径;任务目的地也可以包括一个或多个到达任务的最终目的地的途经点或中断点。第一服务器可以在向车辆发送路径信息时,先发送从车辆当前的位置到途经点或者中断点的路径。当车辆到达这些位置后,第一服务器可以继续向车辆发送到达下一个途经点或者中断点的路径,直至车辆到达任务的最终目的地。其中,车辆每次下发达到一个途径点或者中断点的路径之前,第一服务器可以获取车辆从当前位置到任务的最终目的地的路径,或者,获取车辆从当前位置到下一个途经点或者下一个中断点的路径。Optionally, before the first server acquires the first path, the method further includes: the first server acquires task information, where the task information includes information for indicating the task destination. The task destination can be the end destination of the task, and the first path is the path from the current position of the vehicle to the final destination of the task; the task destination can also include one or more waypoints or interruption points to reach the final destination of the task. When sending the route information to the vehicle, the first server may first send the route from the current position of the vehicle to the passing point or the interruption point. After the vehicle arrives at these locations, the first server may continue to send the route to the next passing point or interruption point to the vehicle until the vehicle reaches the final destination of the task. Wherein, before the vehicle sends a path to a passing point or interruption point each time, the first server can obtain the path of the vehicle from the current position to the final destination of the task, or obtain the path of the vehicle from the current position to the next passing point or disembarkation point. A path to a breakpoint.
可选地,该第一服务器获取任务信息,包括:该第一服务器接收第二服务器发送的任务信息,其中,该第二服务器可以为上述上层应用对应的服务器。Optionally, the acquiring task information by the first server includes: the first server receiving task information sent by a second server, where the second server may be a server corresponding to the above-mentioned upper-layer application.
示例性的,对于港口的场景,可以是第二服务器在接收到用户的指令后,第二服务器向第一服务器发送该任务信息。Exemplarily, for the port scenario, after the second server receives the user's instruction, the second server sends the task information to the first server.
可选地,该第一服务器获取任务信息,包括:该第一服务器接收车辆发送的任务信息。Optionally, the acquiring task information by the first server includes: the first server receiving task information sent by the vehicle.
示例性的,对于城市或者高速通行等场景,可以是车辆检测到用户的指令后,车辆向第一服务器发送该任务信息。Exemplarily, for scenarios such as urban or high-speed traffic, the vehicle may send the task information to the first server after the vehicle detects the user's instruction.
可选地,该第二路径和该第一路径可以是相同的路径。Optionally, the second path and the first path may be the same path.
可选地,该第二路径可以包括该第一路径。Optionally, the second path may include the first path.
可选地,车辆可以实时向第一服务器发送的车辆当前位置、航向角以及速度等信息。例如,当车辆当前位置、航向角以及速度中至少一个参数发生变化时,车辆可以向第一服务器上报发生变化的参数。又例如,车辆可以按照预设周期向第一服务器发送上述参数。Optionally, the vehicle may send information such as the vehicle's current position, heading angle, and speed to the first server in real time. For example, when at least one parameter among the vehicle's current position, heading angle and speed changes, the vehicle may report the changed parameter to the first server. For another example, the vehicle may send the above parameters to the first server according to a preset period.
S1302,该第一服务器确定该车辆在该一段或者多段道路中每段道路上行驶的规划时间信息,该车辆在该每段道路行驶时该每段道路上车辆的总数量小于或者等于该每段道路的容量。S1302. The first server determines the planned time information of the vehicle traveling on each section of the road section or sections, and the total number of vehicles on each section of the road when the vehicle is traveling on the section of road is less than or equal to the capacity of the road.
本申请实施例中,第一服务器在获取第一路径后,可以根据第一路径中的一段或者多段道路的容量,来确定车辆在一段或者多段道路上行驶的规划时间信息。第一服务器可以根据其他车辆的路径和时间规划以及第一路径中的一段或者多段道路的容量来确定当前车辆在一段或者多段道路上行驶的规划时间信息,以避免多辆车发生冲突。具体的确定过程可以参考上述S305中的描述,此处不再赘述。In the embodiment of the present application, after obtaining the first route, the first server may determine the planned time information for the vehicle to travel on one or more road segments according to the capacity of one or more road segments in the first route. The first server can determine the planning time information of the current vehicle traveling on one or more road sections according to the route and time planning of other vehicles and the capacity of one or more road sections in the first route, so as to avoid conflicts among multiple vehicles. For a specific determination process, reference may be made to the description in S305 above, which will not be repeated here.
S1303,该第一服务器向该车辆发送路径信息,该路径信息中包括该一段或者多段道路中至少一段道路的信息以及该车辆在该至少一段道路上行驶的规划时间信息。S1303. The first server sends route information to the vehicle, where the route information includes information about at least one segment of the one or more segments of roads and information about a planned time for the vehicle to travel on the at least one segment of roads.
可选地,该至少一段道路的信息中包括车辆在该至少一段道路中每段道路上行驶的车道信息。Optionally, the information on the at least one section of roads includes lane information of vehicles traveling on each section of the at least one section of roads.
应理解,本申请实施例中,第一服务器在确定了车辆的路径信息后,可以向车辆发送该第一路径中所有的道路的信息以及车辆在每一段道路上行驶的规划时间信息。或者,第一服务器也可以个车辆发送第一路径中至少一段道路的信息以及该至少一段道路上行驶的规划时间信息。例如,该至少一段道路可以包括第一路径中的第一段道路,或者,包括第一路径中的第一段道路和第二段道路。It should be understood that, in the embodiment of the present application, after determining the route information of the vehicle, the first server may send the information of all roads in the first route and the planned time information of the vehicle traveling on each road section to the vehicle. Alternatively, the first server may also send information about at least one section of the road in the first route and information about the planned time for traveling on the at least one section of the road to the vehicle. For example, the at least one section of road may include the first section of road in the first route, or include the first section of road and the second section of road in the first route.
示例性的,第一服务器可以在向车辆发送的路径信息中携带第一路径中的第一段道路的信息以及车辆在该第一段道路上行驶的规划时间信息。车辆可以根据该路径信息,从当前位置行驶至第一段道路的终点。此时车辆可以向第一服务器上报其已经到达第一段道路的终点以及到达第一段道路的终点的时间信息,第一服务器在收到上述信息后可以继续向车辆发送第一路径中的第二段道路的信息以及车辆在该第二段道路上行驶的规划时间信息,以此类推。Exemplarily, the route information sent by the first server to the vehicle may carry information about the first segment of the road in the first route and information about the planned time for the vehicle to travel on the first segment of the road. The vehicle can travel from the current location to the end of the first section of the road according to the route information. At this time, the vehicle can report to the first server that it has reached the end point of the first section of road and the time information when it arrives at the end point of the first section of road. The information of the second section of road and the planned time information of the vehicle traveling on the second section of road, and so on.
示例性的,该路径信息可以参考如表1或者表2所示的关键路径点的信息。Exemplarily, the path information may refer to information of key path points shown in Table 1 or Table 2.
可选地,该至少一段道路包括第一道路,该车辆在该第一道路上行驶的规划时间信息包括用于指示第一时刻的信息和用于指示第二时刻的信息,该第一时刻为该车辆驶入该第一道路的时刻,该第二时刻为该车辆驶离该第一道路的时刻,该方法还包括:在第一时刻和该第二时刻之间,若该第一道路上车辆的总数量大于该第一道路的容量且该车辆的优先级高于另一车辆的优先级,该第一服务器指示该另一车辆在该第一时刻之前驶离该第一道路,或者,指示该另一车辆在该第二时刻之后驶入该第一道路,该另一车辆为准备在该第一时刻和该第二时刻之间行驶在该第一道路上的车辆。Optionally, the at least one section of road includes a first road, and the planned time information of the vehicle traveling on the first road includes information indicating a first moment and information indicating a second moment, and the first moment is The moment when the vehicle enters the first road, the second moment is the moment when the vehicle leaves the first road, and the method further includes: between the first moment and the second moment, if on the first road the total number of vehicles is greater than the capacity of the first road and the priority of the vehicle is higher than that of another vehicle, the first server instructs the other vehicle to leave the first road before the first time, or, Instructing the other vehicle to enter the first road after the second moment, the other vehicle being a vehicle preparing to travel on the first road between the first moment and the second moment.
示例性的,第一服务器确定车辆1在t1时刻驶入该第一道路且t2时刻驶离该第一道路,而第一服务器在之前为车辆2规划在t1时刻驶入该第一道路且t2时刻驶离该第一道路。若第一服务器确定第一道路的容量为1且车辆1的优先级大于车辆2的优先级,那么此时第一服务器可以指示车辆2在t1时刻之前驶离该第一道路,或者,指示车辆2在t2时刻之后驶入该道路。Exemplarily, the first server determines that vehicle 1 enters the first road at time t1 and leaves the first road at time t2 , and the first server previously planned for
一个实施例中,第一服务器在指示该另一车辆在该第一时刻之前驶离该第一道路,或者,指示该另一车辆在该第二时刻之后驶入该第一道路的方式可以是第一服务器向另一车辆发送新的路径信息。In one embodiment, the first server instructs the other vehicle to leave the first road before the first moment, or the method of instructing the other vehicle to enter the first road after the second moment may be The first server sends new route information to another vehicle.
一个实施例中,另一车辆在接收到第一服务器的指示后,可以自行确定其行驶的信息。例如,另一车辆可以提升速度,以保证其在该第一时刻之前驶离该第一道路;或者,该另一车辆可以降低速度,以保证其在该第二时刻之后驶入该第一道路。In one embodiment, another vehicle can determine its driving information by itself after receiving the instruction from the first server. For example, another vehicle may increase speed to ensure that it leaves the first road before the first moment; or, the other vehicle may reduce speed to ensure that it enters the first road after the second moment .
可选地,该车辆在该每段道路上行驶的规划时间信息包括驶入该每段道路的时刻和驶离该每段道路的时刻,或者,该车辆在每段道路上行驶的规划时间信息包括驶入该每段道路的时刻以及该车辆在该每段道路上的速度信息,或者,该车辆在每段道路上行驶的规划时间信息包括驶离该每段道路的时刻以及该车辆在该每段道路上的速度信息。Optionally, the planned time information of the vehicle traveling on each section of road includes the time of entering each section of road and the time of leaving each section of road, or, the planned time information of the vehicle traveling on each section of road Including the time when the vehicle enters each section of the road and the speed information of the vehicle on the each section of the road, or, the planned time information for the vehicle to travel on each section of the road includes the time when the vehicle leaves each section of the road and the vehicle's speed on the each section of the road. Speed information on each road segment.
可选地,该路径信息还包括该车辆在该至少一段道路上的行驶模式的信息,该行驶模式包括直线行驶、自然转弯模式或者蟹行模式中的至少一种。Optionally, the route information further includes information about the driving mode of the vehicle on the at least one section of the road, and the driving mode includes at least one of straight-line driving, natural turning mode or crab driving mode.
可选地,该第一服务器获取第一路径,包括:该第一服务器根据该车辆的通行等级和/或该车辆的类型,确定允许该车辆行驶的道路,该允许该车辆行驶的道路包括该一段或者多段道路;该第一服务器根据该允许该车辆行驶的道路,得到该第一路径。Optionally, the acquiring the first route by the first server includes: determining, by the first server, a road that allows the vehicle to travel according to the traffic level of the vehicle and/or the type of the vehicle, and the road that allows the vehicle to travel includes the One or more sections of road; the first server obtains the first route according to the road that allows the vehicle to travel.
示例性的,车辆的通行等级可以携带在任务信息中,该第一服务器可以根据车辆的通行等级确定允许该车辆行驶的道路,其中车辆的通行等级可以是大于或者等于允许该车辆行驶的道路的等级。例如第一服务器可以确定车辆可以在道路1-9上行驶,其中,道路1-3组成路径1,道路4-6组成路径2,道路7-9组成路径3,路径1、路径2和路径3可以为车辆当前的位置至任务目的地的路径。车辆可以从路径1、路径2和路径3中选择一条路径作为上述第一路径。Exemplarily, the traffic level of the vehicle may be carried in the task information, and the first server may determine the road that the vehicle is allowed to drive according to the traffic level of the vehicle, wherein the traffic level of the vehicle may be greater than or equal to the road that the vehicle is allowed to drive. grade. For example, the first server may determine that the vehicle can travel on roads 1-9, wherein roads 1-3
示例性的,第一服务器可以将该路径1、路径2和路径3发送给车辆,车辆可以通过HMI来提示这3条路径,当车辆检测到用户选择了某一条路径后,车辆可以将该路径的信息发送给第一服务器,进而第一服务器可以结合该路径上的道路的容量来确定车辆在该路径中每段道路上行驶的规划时间信息。Exemplarily, the first server can send the
示例性的,车辆的类型可以携带在任务信息中,该第一服务器可以根据车辆的类型确定允许该车辆行驶的道路。例如,若车辆的类型为救护车或者消防车等特种车辆,那么第一服务器可以确定从该车辆当前的位置至任务目的地的所有道路均可以通行。Exemplarily, the type of the vehicle may be carried in the task information, and the first server may determine a road that allows the vehicle to travel according to the type of the vehicle. For example, if the type of the vehicle is a special vehicle such as an ambulance or a fire truck, then the first server may determine that all roads from the current position of the vehicle to the mission destination are passable.
示例性的,第一服务器中保存有车辆的类型和车辆的等级的映射关系,第一服务器在获取到车辆的类型时可以确定该车辆的等级,若车辆的等级大于或者等于某一条道路的等级,那么第一服务器可以确定该道路允许车辆行驶。Exemplarily, the first server stores the mapping relationship between the type of the vehicle and the level of the vehicle, and the first server can determine the level of the vehicle when the type of the vehicle is obtained, if the level of the vehicle is greater than or equal to the level of a certain road , then the first server can determine that the road allows vehicles to travel.
一个实施例中,第一服务器获取第一路径可以是在接收到任务信息时获取第一路径,也可以是提前获取到第一路径。In an embodiment, acquiring the first path by the first server may be acquiring the first path when receiving task information, or acquiring the first path in advance.
示例性的,车辆的任务目的地可以为位置1,第一服务器可以根据车辆当前的位置信息和位置1,获取第二路径,该第二路径为从车辆当前的位置到位置1的路径。若此时第一服务器确定第二路径中存在故障点,那么此时第一服务器可以将第二路径分为第一路径和第三路径,其中,第一路径为从故障点到位置1的路径,第三路径为从车辆当前的位置到故障点的路径。第一服务器可以向车辆下发第三路径对应的路径信息。车辆在接收到第三路径对应的路径信息后,可以根据该第三路径对应的路径信息行驶至故障点。Exemplarily, the task destination of the vehicle may be
当第一服务器确定车辆行驶至故障点且此时故障点处的故障消失时,服务器可以向车辆下发第一路径对应的路径信息,该第一路径对应的路径信息可以包括该一段或者多段道路中至少一段道路的信息以及该车辆在该至少一段道路上行驶的规划时间信息。When the first server determines that the vehicle has driven to the fault point and the fault at the fault point disappears at this time, the server can send the route information corresponding to the first route to the vehicle, and the route information corresponding to the first route can include the one or more road segments Information about at least one section of the road and information about the planned time when the vehicle travels on the at least one section of the road.
可选地,该第一服务器获取第一路径,包括:该第一服务器向第三服务器发送该任务目的地的信息;该第一服务器获取该第三服务器根据该任务目的地得到的该第一路径的信息。Optionally, the acquiring the first path by the first server includes: the first server sending information about the task destination to a third server; the first server acquiring the first path obtained by the third server according to the task destination. path information.
可选地,该第三服务器可以为地图服务器。Optionally, the third server may be a map server.
可选地,该第一服务器中存储有地图信息,该第一服务器根据该任务目的地,获取第二路径,包括:该第一服务器根据存储的地图信息以及该任务目的地,确定该第二路径。Optionally, the first server stores map information, and the first server obtains the second route according to the mission destination, including: the first server determines the second route according to the stored map information and the mission destination. path.
应理解,本申请实施例中,第一服务器和第三服务器可以位于同一个服务器中,也可以位于不同的服务器中,本申请对此不作限定。It should be understood that, in this embodiment of the present application, the first server and the third server may be located in the same server, or may be located in different servers, which is not limited in the present application.
可选地,该路径信息中还包括用于指示该车辆在第二道路上进行人字形调头的信息,该至少一段道路包括该第二道路。Optionally, the route information further includes information for instructing the vehicle to perform a chevron turn on a second road, and the at least one section of road includes the second road.
示例性的,第一服务器确定任务信息中包括用于指示车辆需要进行人字形调头的信息,那么车辆在获取第一路径后可以从第一路径中的多段道路中确定哪些道路可以用于车辆进行人字形调头。若有多段道路支持人字形调头,那么第一服务器可以将支持人字形调头的多段道路的信息发送给第二服务器(或者车辆),从而由第二服务器(或者车辆)提醒用户选择一段道路进行人字形调头。第二服务器(或者车辆)在检测到用户选择某段道路的操作后,可以将该段道路的信息发送给第一服务器,从而第一服务器可以在向车辆发送的路径信息中携带用于指示车辆进行人字形调头的道路的信息。或者,第一路径中只有一段道路支持人字形调头,那么第一服务器可以直接在向车辆发送的路径信息中携带用于指示车辆进行人字形调头的道路的信息。Exemplarily, if the first server determines that the task information includes information indicating that the vehicle needs to perform a herringbone U-turn, then the vehicle can determine which roads can be used for the vehicle to perform a U-turn from the multiple sections of roads in the first route after obtaining the first route. Herringbone U-turn. If there are multiple sections of roads that support the herringbone U-turn, then the first server can send the information of the multi-section roads that support the Herringbone U-turn to the second server (or vehicle), so that the second server (or vehicle) reminds the user to select a section of road to perform the turn. Zigzag U-turn. After the second server (or vehicle) detects the user's operation of selecting a certain road, it can send the information of the road to the first server, so that the first server can carry the path information for indicating the vehicle in the route information sent to the vehicle. Information on roads on which to perform a herringbone U-turn. Alternatively, only a section of the road in the first route supports a herringbone U-turn, then the first server may directly carry information for indicating the road on which the vehicle performs a herringbone U-turn in the route information sent to the vehicle.
本申请实施例中,服务器在给车辆下发的路径信息中可以包括一段或者多段道路的信息以及车辆在一段或者多段道路上行驶的规划时间信息,从道路和时间两个维度对车辆的行驶进行控制,有助于避免车辆之间的冲突,提升车辆之间的通行效率,从而有助于实现车辆之间有序作业或者通行。In the embodiment of the present application, the route information issued by the server to the vehicle may include information on one or more roads and the planned time information on which the vehicle travels on one or more roads. Control helps avoid conflicts between vehicles and improves the efficiency of traffic between vehicles, thereby helping to achieve orderly operations or traffic between vehicles.
可选地,该方法还包括:车辆向用户提示该车辆在该至少一段道路上行驶的规划时间信息。Optionally, the method further includes: the vehicle prompts the user with information about the planned time when the vehicle travels on the at least one section of the road.
示例性的,车辆可以通过声音或者人机交互界面HMI向用户提示该车辆在该至少一段道路上行驶的规划时间信息。Exemplarily, the vehicle may prompt the user with information about the planned time for the vehicle to travel on the at least one section of the road through sound or a human-machine interface HMI.
示例性的,当车辆行驶在第一路径中的某一段道路上时,车辆可以通过HMI显示达到该段道路起点的时刻,在该段道路上行驶的速度信息以及在该车辆到达该段道路终点的时刻。Exemplarily, when the vehicle is driving on a certain section of the road in the first route, the vehicle can display the moment when the vehicle reaches the starting point of the section of the road through the HMI, the speed information of traveling on the section of the road and the time when the vehicle reaches the end of the section of the road. moment.
可选地,该路径信息中包括第一标识信息,该车辆接收第一服务器发送的路径信息之前,该方法还包括:该车辆向该第一服务器发送任务信息,该任务信息中包括用于指示该任务目的地的信息;该车辆接收该第一服务器根据该任务信息发送的第二标识信息;其中,该方法包括:若该第一标识信息和该第二标识信息匹配,该车辆根据该路径信息行驶。Optionally, the route information includes first identification information, and before the vehicle receives the route information sent by the first server, the method further includes: the vehicle sends task information to the first server, and the task information includes information for indicating The task destination information; the vehicle receives the second identification information sent by the first server according to the task information; wherein, the method includes: if the first identification information and the second identification information match, the vehicle according to the route information travel.
示例性的,第一服务器可以在接收到车辆发送的任务信息后向车辆发送第一ID。当第一服务器确定了路径信息后可以在向车辆发送的路径信息中携带第二ID。车辆可以对第一ID和该第二ID进行校验,若第一ID和第二ID匹配,那么车辆可以按照该路径信息行驶。Exemplarily, the first server may send the first ID to the vehicle after receiving the task information sent by the vehicle. After the first server determines the route information, the second ID may be carried in the route information sent to the vehicle. The vehicle can check the first ID and the second ID, and if the first ID matches the second ID, the vehicle can travel according to the route information.
应理解,该第一ID和第二ID匹配可以理解为第一ID和第二ID一致,或者,第一ID经过预设算法(例如,预设函数运算)得到的第三ID与第二ID一致,或者,第二ID经过预设算法(例如,预设函数运算)得到的第四ID与第一ID一致。It should be understood that the match between the first ID and the second ID can be understood as the first ID and the second ID are consistent, or the third ID obtained by the first ID through a preset algorithm (for example, a preset function operation) and the second ID Consistent, or, the fourth ID obtained by the second ID through a preset algorithm (for example, a preset function operation) is consistent with the first ID.
本申请实施例中,第一服务器接收到车辆的任务目的地可能与第一服务器下发给车辆的第一路径中的目的地不一致(例如,从车辆当前的位置到任务目的地之间存在故障点,车辆在第一路径中携带的是从车辆当前位置到故障点的路径信息),通过第一标识信息和第二标识信息,车辆可以准确判断该路径信息就是针对该车辆的路径信息,从而避免车辆的误判。In the embodiment of the present application, the task destination of the vehicle received by the first server may be inconsistent with the destination in the first path issued by the first server to the vehicle (for example, there is a fault between the current position of the vehicle and the task destination). point, what the vehicle carries in the first path is the path information from the current location of the vehicle to the fault point), through the first identification information and the second identification information, the vehicle can accurately determine that the path information is the path information for the vehicle, thus Avoid misjudgment of vehicles.
可选地,该方法还包括:若对该至少一段道路的信息和/或该车辆在该至少一段道路上行驶的规划时间信息校验成功,该车辆根据该路径信息行驶。Optionally, the method further includes: if the information on the at least one section of the road and/or information on the planned time of the vehicle traveling on the at least one section of the road is successfully verified, the vehicle travels according to the route information.
应理解,车辆对该至少一段道路的信息和/或该车辆在该至少一段道路上行驶的规划时间信息的校验过程可以参考上述S904中的描述,此处不再赘述。It should be understood that, for the verification process of the vehicle's information on the at least one section of road and/or the planned time information of the vehicle traveling on the at least one section of the road, reference may be made to the description in S904 above, which will not be repeated here.
图14示出了本申请实施例提供的一种装置1400的示意性框图。该装置1400包括:FIG. 14 shows a schematic block diagram of an apparatus 1400 provided by an embodiment of the present application. The device 1400 includes:
获取单元1401,用于获取第一路径,该第一路径为从车辆当前位置到任务目的地的路径,该第一路径包括一段或者多段道路;An acquisition unit 1401, configured to acquire a first path, the first path is the path from the current position of the vehicle to the mission destination, and the first path includes one or more road sections;
确定单元1402,用于确定该车辆在该一段或者多段道路中每段道路上行驶的规划时间信息,该车辆在该每段道路行驶时该每段道路上车辆的总数量小于或者等于该每段道路的容量;Determining unit 1402, configured to determine the planned time information of the vehicle traveling on each section of the road section or sections, and the total number of vehicles on each section of the road when the vehicle is traveling on the section of road is less than or equal to the number of vehicles on each section of road the capacity of the road;
发送单元1403,用于向该车辆发送路径信息,该路径信息中包括该一段或者多段道路中至少一段道路的信息以及该车辆在该至少一段道路上行驶的规划时间信息。The sending unit 1403 is configured to send route information to the vehicle, where the route information includes information on at least one segment of the one or more segments of roads and information on the planned time for the vehicle to travel on the at least one segment of roads.
可选地,该获取单元1401,还用于在该获取第一路径之前,获取任务信息,该任务信息包括用于指示该任务目的地的信息;根据该任务目的地,获取第二路径,该第二路径与该第一路径相关联。Optionally, the acquiring unit 1401 is further configured to acquire task information before acquiring the first route, where the task information includes information indicating the task destination; and acquire the second route according to the task destination, the A second path is associated with the first path.
可选地,该至少一段道路包括第一道路,该车辆在该第一道路上行驶的规划时间信息包括用于指示第一时刻的信息和用于指示第二时刻的信息,该第一时刻为该车辆驶入该第一道路的时刻,该第二时刻为该车辆驶离该第一道路的时刻,该发送单元,还用于:在第一时刻和该第二时刻之间,若该第一道路上车辆的总数量大于该第一道路的容量且该车辆的优先级高于另一车辆的优先级,向该另一车辆发送指示信息,该指示信息用于指示该另一车辆在该第一时刻之前驶离该第一道路,或者,指示该另一车辆在该第二时刻之后驶入该第一道路,该另一车辆为准备在该第一时刻和该第二时刻之间行驶在该第一道路上的车辆。Optionally, the at least one section of road includes a first road, and the planned time information of the vehicle traveling on the first road includes information indicating a first moment and information indicating a second moment, and the first moment is The moment when the vehicle enters the first road, the second moment is the moment when the vehicle leaves the first road, the sending unit is also used for: between the first moment and the second moment, if the second moment The total number of vehicles on one road is greater than the capacity of the first road and the priority of this vehicle is higher than that of another vehicle, sending instruction information to the other vehicle, the instruction information is used to indicate that the other vehicle is on the first road leaving the first road before the first time, or instructing the other vehicle to enter the first road after the second time, the other vehicle not preparing to travel between the first time and the second time vehicles on the first road.
可选地,该车辆在该第一道路上行驶的规划时间信息包括该第一时刻的信息和该第二时刻的信息,或者,该车辆在第一道路上行驶的规划时间信息包括该第一时刻的信息以及该车辆在该第一道路上的速度信息,或者,该车辆在第一道路上行驶的规划时间信息包括该第二时刻的信息以及该车辆在该第一道路上的速度信息。Optionally, the planned time information of the vehicle traveling on the first road includes the information of the first moment and the information of the second moment, or, the planned time information of the vehicle traveling on the first road includes the first The time information and the speed information of the vehicle on the first road, or the planned time information of the vehicle traveling on the first road includes the information of the second time and the speed information of the vehicle on the first road.
可选地,该路径信息还包括该车辆在该至少一段道路上的行驶模式的信息,该行驶模式包括直线行驶、自然转弯模式或者蟹行模式中的至少一种。Optionally, the route information further includes information about the driving mode of the vehicle on the at least one section of the road, and the driving mode includes at least one of straight-line driving, natural turning mode or crab driving mode.
可选地,该获取单元1401具体用于:根据该车辆的通行等级和/或该车辆的类型,确定允许该车辆行驶的道路,该允许该车辆行驶的道路包括该一段或者多段道路;根据该允许该车辆行驶的道路,得到该第一路径。Optionally, the acquiring unit 1401 is specifically configured to: determine a road that the vehicle is allowed to run on according to the traffic level of the vehicle and/or the type of the vehicle, and the road on which the vehicle is allowed to run includes the one or more roads; according to the The road on which the vehicle is allowed to travel is obtained from the first route.
可选地,该获取单元1401具体用于:向地图服务器发送该任务目的地的信息;获取该地图服务器根据该任务目的地得到的该第一路径的信息。Optionally, the obtaining unit 1401 is specifically configured to: send the information of the mission destination to the map server; obtain the information of the first route obtained by the map server according to the mission destination.
可选地,该路径信息中还包括用于指示该车辆在第二道路上进行人字形调头的信息,该至少一段道路包括该第二道路。Optionally, the route information further includes information for instructing the vehicle to perform a chevron turn on a second road, and the at least one section of road includes the second road.
图15示出了本申请实施例提供的一种装置1500的示意性框图。如图15所示,该装置1500包括:FIG. 15 shows a schematic block diagram of an apparatus 1500 provided by an embodiment of the present application. As shown in Figure 15, the device 1500 includes:
发送单元1501,用于向服务器发送该装置当前位置的信息;a sending unit 1501, configured to send information about the current location of the device to the server;
接收单元1502,用于接收服务器发送的路径信息,该路径信息中包括一段或者多段道路中至少一段道路的信息以及该装置在该至少一段道路上行驶的规划时间信息,该一段或者多段道路所组成的第一路径为从该装置当前位置至任务目的地的路径。The receiving unit 1502 is configured to receive route information sent by the server, the route information includes information on at least one segment of roads in one or more segments of roads and information on the planned time for the device to travel on the at least one segment of roads, and the one or more segments of roads consist of The first path of is the path from the current location of the device to the task destination.
可选地,该装置1500还包括:提示单元,用于向用户提示该装置在该至少一段道路上行驶的规划时间信息。Optionally, the device 1500 further includes: a prompting unit, configured to prompt the user with information about the planned time for the device to travel on the at least one section of the road.
可选地,该路径信息还包括该装置在该至少一段道路上的行驶模式的信息,该行驶模式包括直线行驶、自然转弯模式或者蟹行模式中的至少一种。Optionally, the route information further includes information about the driving mode of the device on the at least one section of the road, and the driving mode includes at least one of straight-line driving, natural turning mode or crab driving mode.
可选地,该路径信息中包括用于指示该装置在第二道路上进行人字形调头的信息,该至少一段道路包括该第二道路。Optionally, the route information includes information for instructing the device to perform a chevron turn on a second road, and the at least one section of road includes the second road.
可选地,该路径信息中包括第一标识信息,该发送单元1501,还用于在接收服务器发送的路径信息之前,向该服务器发送任务信息,该任务信息中包括用于指示该任务目的地的信息;Optionally, the path information includes first identification information, and the sending unit 1501 is further configured to send task information to the server before receiving the path information sent by the server, and the task information includes information for indicating the task destination. Information;
该接收单元1502,还用于接收该服务器根据该任务信息发送的第二标识信息;The receiving unit 1502 is further configured to receive second identification information sent by the server according to the task information;
该装置还包括:校验单元1503,用于在该装置根据该路径信息行驶之前,确定该第一标识信息和该第二标识信息匹配。The device also includes: a checking unit 1503, configured to determine that the first identification information matches the second identification information before the device runs according to the route information.
可选地,该装置还包括:校验单元1503,用于在该装置根据该路径信息行驶之前,确定对该至少一段道路的信息和/或该装置在该至少一段道路上行驶的规划时间信息校验成功。Optionally, the device further includes: a verification unit 1503, configured to determine information about the at least one section of road and/or information about the planned time for the device to travel on the at least one section of the road before the device travels according to the route information Validation succeeded.
本申请实施例还提供了一种装置,该装置包括处理单元和存储单元,其中存储单元用于存储指令,处理单元执行存储单元所存储的指令,以使该装置执行上述实施例中第一服务器执行的步骤;或者,处理单元执行存储单元所存储的指令,以使该装置执行上述实施例中车辆执行的步骤。The embodiment of the present application also provides a device, the device includes a processing unit and a storage unit, wherein the storage unit is used to store instructions, and the processing unit executes the instructions stored in the storage unit, so that the device executes the first server in the above embodiment Steps executed; or, the processing unit executes the instructions stored in the storage unit, so that the device executes the steps executed by the vehicle in the above embodiments.
可选地,若该装置位于车辆中,上述处理单元可以是图1所示的处理器151,上述存储单元可以是图1所示的存储器152,其中存储器152可以是芯片内的存储单元(例如,寄存器、缓存等),也可以是车辆内位于上述芯片外部的存储单元(例如,只读存储器、随机存取存储器等)。Optionally, if the device is located in a vehicle, the above-mentioned processing unit may be the
本申请实施例还提供了一种计算机程序产品,所述计算机程序产品包括:计算机程序代码,当所述计算机程序代码在计算机上运行时,使得计算机执行上述方法。The embodiment of the present application also provides a computer program product, the computer program product including: computer program code, when the computer program code is run on the computer, the computer is made to execute the above method.
本申请实施例还提供了一种服务器,该服务器可以包括上述装置1400。The embodiment of the present application also provides a server, and the server may include the above-mentioned apparatus 1400 .
本申请实施例还提供了一种车辆,该车辆可以包括上述装置1500。The embodiment of the present application also provides a vehicle, which may include the above-mentioned device 1500 .
本申请实施例中还提供了一种车辆控制装置,该车辆控制装置可以包括上述装置1400。该车辆控制装置可以呈现为多种不同的产品形态。示例的,该车辆控制装置可以是服务器。其中,该服务器可以是单个服务器,也可以是指由多个服务器构成的服务器集群。该服务器可以是本地服务器。在车联网领域中,该服务器具体可以是云服务器,也可称为云、云端、云端服务器、云端控制器或车联网服务器等。云服务器是对具有数据处理能力的设备或器件的统称,诸如可以包括主机或处理器等实体设备,也可以包括虚拟机或容器等虚拟设备,还可以包括芯片或集成电路。可选的,该车辆控制装置还可以是路侧单元(road sideunit,RSU),或者是路侧单元中的芯片或部件。An embodiment of the present application also provides a vehicle control device, which may include the above-mentioned device 1400 . The vehicle control device can be presented in many different product forms. Exemplarily, the vehicle control device may be a server. Wherein, the server may be a single server, or may refer to a server cluster composed of multiple servers. The server can be a local server. In the field of the Internet of Vehicles, the server may specifically be a cloud server, and may also be called a cloud, a cloud, a cloud server, a cloud controller, or an Internet of Vehicles server. A cloud server is a general term for devices or devices with data processing capabilities, such as physical devices such as hosts or processors, virtual devices such as virtual machines or containers, and chips or integrated circuits. Optionally, the vehicle control device may also be a roadside unit (road sideunit, RSU), or a chip or component in the roadside unit.
车辆控制装置可以向上对接上层应用。示例的,操作人员可以通过该上层应用对车辆控制装置进行配置,包括但不限于配置所述车辆控制装置的功能、以及下发任务信息、控制指令等。进一步地,车辆控制装置可以根据从上层应用获得配置信息、任务信息、控制指令等,并利用自身可以获得的其它信息,对系统中的相关车辆进行统一调度,以提高车辆整体的作业效率。The vehicle control device can be connected upwards to the upper layer application. For example, the operator can configure the vehicle control device through the upper-layer application, including but not limited to configuring functions of the vehicle control device, and issuing task information, control instructions, and the like. Furthermore, the vehicle control device can uniformly schedule related vehicles in the system according to the configuration information, task information, control instructions, etc. obtained from the upper-layer application, and use other information that can be obtained by itself, so as to improve the overall operating efficiency of the vehicle.
图16示出了本申请实施例提供的系统1600的示意性框图。如图16所示,该系统1600可以包括第一服务器1601和车辆1602,其中,该第一服务器1601可以为上述实施例中的第一服务器,该车辆1602可以是上述实施例中的车辆。FIG. 16 shows a schematic block diagram of a system 1600 provided by an embodiment of the present application. As shown in Fig. 16, the system 1600 may include a first server 1601 and a vehicle 1602, wherein the first server 1601 may be the first server in the above embodiment, and the vehicle 1602 may be the vehicle in the above embodiment.
本申请实施例还提供了一种计算机可读介质,所述计算机可读介质存储有程序代码,当所述计算机程序代码在计算机上运行时,使得计算机执行上述方法。The embodiment of the present application also provides a computer-readable medium, the computer-readable medium stores program codes, and when the computer program codes are run on a computer, the computer is made to execute the above method.
在实现过程中,上述方法的各步骤可以通过处理器中的硬件的集成逻辑电路或者软件形式的指令完成。结合本申请实施例所公开的方法可以直接体现为硬件处理器执行完成,或者用处理器中的硬件及软件模块组合执行完成。软件模块可以位于随机存储器,闪存、只读存储器,可编程只读存储器或者电可擦写可编程存储器、寄存器等本领域成熟的存储介质中。该存储介质位于存储器,处理器读取存储器中的信息,结合其硬件完成上述方法的步骤。为避免重复,这里不再详细描述。In the implementation process, each step of the above method can be completed by an integrated logic circuit of hardware in a processor or an instruction in the form of software. The methods disclosed in the embodiments of the present application may be directly implemented by a hardware processor, or implemented by a combination of hardware and software modules in the processor. The software module can be located in a mature storage medium in the field such as random access memory, flash memory, read-only memory, programmable read-only memory or electrically erasable programmable memory, register. The storage medium is located in the memory, and the processor reads the information in the memory, and completes the steps of the above method in combination with its hardware. To avoid repetition, no detailed description is given here.
应理解,本申请实施例中,该处理器可以为中央处理单元(central processingunit,CPU),该处理器还可以是其他通用处理器、数字信号处理器(digital signalprocessor,DSP)、专用集成电路(application specific integrated circuit,ASIC)、现成可编程门阵列(field programmable gate array,FPGA)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件等。通用处理器可以是微处理器或者该处理器也可以是任何常规的处理器等。It should be understood that, in the embodiment of the present application, the processor may be a central processing unit (central processing unit, CPU), and the processor may also be other general processors, digital signal processors (digital signal processor, DSP), application specific integrated circuits ( Application specific integrated circuit (ASIC), off-the-shelf programmable gate array (field programmable gate array, FPGA) or other programmable logic devices, discrete gate or transistor logic devices, discrete hardware components, etc. A general-purpose processor may be a microprocessor, or the processor may be any conventional processor, or the like.
还应理解,本申请实施例中,该存储器可以包括只读存储器和随机存取存储器,并向处理器提供指令和数据。It should also be understood that in the embodiment of the present application, the memory may include a read-only memory and a random access memory, and provide instructions and data to the processor.
在本申请实施例中,“第一”、“第二”以及各种数字编号仅为描述方便进行的区分,并不用来限制本申请实施例的范围。例如,区分不同的管路、通孔等。In the embodiment of the present application, "first", "second" and various numbers are only for convenience of description, and are not used to limit the scope of the embodiment of the present application. For example, differentiating between different lines, vias, etc.
应理解,本文中术语“和/或”,仅仅是一种描述关联对象的关联关系,表示可以存在三种关系,例如,A和/或B,可以表示:单独存在A,同时存在A和B,单独存在B这三种情况。另外,本文中字符“/”,一般表示前后关联对象是一种“或”的关系。It should be understood that the term "and/or" in this article is only an association relationship describing associated objects, which means that there may be three relationships, for example, A and/or B may mean: A exists alone, and A and B exist at the same time , there are three cases of B alone. In addition, the character "/" in this article generally indicates that the contextual objects are an "or" relationship.
应理解,在本申请的各种实施例中,上述各过程的序号的大小并不意味着执行顺序的先后,各过程的执行顺序应以其功能和内在逻辑确定,而不应对本申请实施例的实施过程构成任何限定。It should be understood that, in various embodiments of the present application, the sequence numbers of the above-mentioned processes do not mean the order of execution, and the execution order of the processes should be determined by their functions and internal logic, and should not be used in the embodiments of the present application. The implementation process constitutes any limitation.
本领域普通技术人员可以意识到,结合本文中所公开的实施例描述的各示例的单元及算法步骤,能够以电子硬件、或者计算机软件和电子硬件的结合来实现。这些功能究竟以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。专业技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不应认为超出本申请的范围。Those skilled in the art can appreciate that the units and algorithm steps of the examples described in conjunction with the embodiments disclosed herein can be implemented by electronic hardware, or a combination of computer software and electronic hardware. Whether these functions are executed by hardware or software depends on the specific application and design constraints of the technical solution. Those skilled in the art may use different methods to implement the described functions for each specific application, but such implementation should not be regarded as exceeding the scope of the present application.
所属领域的技术人员可以清楚地了解到,为描述的方便和简洁,上述描述的系统、装置和单元的具体工作过程,可以参考前述方法实施例中的对应过程,在此不再赘述。Those skilled in the art can clearly understand that for the convenience and brevity of the description, the specific working process of the above-described system, device and unit can refer to the corresponding process in the foregoing method embodiment, which will not be repeated here.
在本申请所提供的几个实施例中,应该理解到,所揭露的系统、装置和方法,可以通过其它的方式实现。例如,以上所描述的装置实施例仅仅是示意性的,例如,所述单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个单元或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。另一点,所显示或讨论的相互之间的耦合或直接耦合或通信连接可以是通过一些接口,装置或单元的间接耦合或通信连接,可以是电性,机械或其它的形式。In the several embodiments provided in this application, it should be understood that the disclosed systems, devices and methods may be implemented in other ways. For example, the device embodiments described above are only illustrative. For example, the division of the units is only a logical function division. In actual implementation, there may be other division methods. For example, multiple units or components can be combined or May be integrated into another system, or some features may be ignored, or not implemented. In another point, the mutual coupling or direct coupling or communication connection shown or discussed may be through some interfaces, and the indirect coupling or communication connection of devices or units may be in electrical, mechanical or other forms.
所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部单元来实现本实施例方案的目的。The units described as separate components may or may not be physically separated, and the components shown as units may or may not be physical units, that is, they may be located in one place, or may be distributed to multiple network units. Part or all of the units can be selected according to actual needs to achieve the purpose of the solution of this embodiment.
另外,在本申请各个实施例中的各功能单元可以集成在一个处理单元中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个单元中。In addition, each functional unit in each embodiment of the present application may be integrated into one processing unit, each unit may exist separately physically, or two or more units may be integrated into one unit.
所述功能如果以软件功能单元的形式实现并作为独立的产品销售或使用时,可以存储在一个计算机可读取存储介质中。基于这样的理解,本申请的技术方案本质上或者说对现有技术做出贡献的部分或者该技术方案的部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储介质中,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网络设备等)执行本申请各个实施例所述方法的全部或部分步骤。而前述的存储介质包括:U盘、移动硬盘、只读存储器(read-only memory,ROM)、随机存取存储器(random access memory,RAM)、磁碟或者光盘等各种可以存储程序代码的介质。If the functions described above are realized in the form of software function units and sold or used as independent products, they can be stored in a computer-readable storage medium. Based on this understanding, the technical solution of the present application is essentially or the part that contributes to the prior art or the part of the technical solution can be embodied in the form of a software product, and the computer software product is stored in a storage medium, including Several instructions are used to make a computer device (which may be a personal computer, a server, or a network device, etc.) execute all or part of the steps of the methods described in the various embodiments of the present application. The aforementioned storage medium includes: U disk, mobile hard disk, read-only memory (read-only memory, ROM), random access memory (random access memory, RAM), magnetic disk or optical disk and other various media that can store program codes. .
以上所述,仅为本申请的具体实施方式,但本申请的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本申请揭露的技术范围内,可轻易想到变化或替换,都应涵盖。在本申请的保护范围之内。因此,本申请的保护范围应以所述权利要求的保护范围为准。The above is only a specific implementation of the application, but the scope of protection of the application is not limited thereto. Anyone familiar with the technical field can easily think of changes or substitutions within the technical scope disclosed in the application. should be covered. Within the protection scope of this application. Therefore, the protection scope of the present application should be determined by the protection scope of the claims.
Claims (36)
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110739529.5A CN115540887A (en) | 2021-06-30 | 2021-06-30 | Method, server and vehicle for path planning |
| EP22832118.8A EP4365553A4 (en) | 2021-06-30 | 2022-06-29 | ROUTE PLANNING METHOD, SERVER AND VEHICLE |
| PCT/CN2022/102418 WO2023274306A1 (en) | 2021-06-30 | 2022-06-29 | Route planning method, server, and vehicle |
| US18/400,046 US20240230361A9 (en) | 2021-06-30 | 2023-12-29 | Path Planning Method, Server, and Vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110739529.5A CN115540887A (en) | 2021-06-30 | 2021-06-30 | Method, server and vehicle for path planning |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN115540887A true CN115540887A (en) | 2022-12-30 |
Family
ID=84691465
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202110739529.5A Pending CN115540887A (en) | 2021-06-30 | 2021-06-30 | Method, server and vehicle for path planning |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20240230361A9 (en) |
| EP (1) | EP4365553A4 (en) |
| CN (1) | CN115540887A (en) |
| WO (1) | WO2023274306A1 (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116502988A (en) * | 2023-06-25 | 2023-07-28 | 深圳市壹站智汇科技有限公司 | Centralized and distributed combined path planning method, storage medium and equipment |
| CN116539044A (en) * | 2023-05-29 | 2023-08-04 | 中国联合网络通信集团有限公司 | Path optimization method, device, equipment and storage medium based on user urgency |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105788335A (en) * | 2016-04-05 | 2016-07-20 | 广东欧珀移动通信有限公司 | Navigation method and terminal |
| CN106382939A (en) * | 2015-12-20 | 2017-02-08 | 杭州后博科技有限公司 | System and method for predicating driving time on navigation path based on historical data |
| CN107782326A (en) * | 2016-08-31 | 2018-03-09 | 百度在线网络技术(北京)有限公司 | Method, apparatus and equipment for automobile navigation |
| CN109840632A (en) * | 2019-01-23 | 2019-06-04 | 中国联合网络通信集团有限公司 | A kind of traffic route assessment method and device for planning |
| CN111060121A (en) * | 2018-10-17 | 2020-04-24 | 腾讯大地通途(北京)科技有限公司 | Route selection method and device, storage medium and electronic device |
| CN112907945A (en) * | 2021-01-18 | 2021-06-04 | 阿里巴巴集团控股有限公司 | Road state determination and navigation route planning method and equipment |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9691278B2 (en) * | 2015-07-28 | 2017-06-27 | Mcafee, Inc. | Systems and methods for traffic control |
| US10429195B2 (en) * | 2017-09-19 | 2019-10-01 | Here Global B.V. | Method, apparatus, and computer program product for generation of a route using time and space |
| CN108062863A (en) * | 2017-11-06 | 2018-05-22 | 华为技术有限公司 | The planing method and unit of a kind of express lane |
| CN109410619B (en) * | 2018-12-04 | 2021-09-10 | 清华大学 | Automatic traffic control method and system under one-way road network |
| CN109887289A (en) * | 2019-03-28 | 2019-06-14 | 南京邮电大学 | A network traffic maximization method for urban traffic network model |
| CN110264120A (en) * | 2019-05-06 | 2019-09-20 | 盐城品迅智能科技服务有限公司 | A kind of intelligent storage route planning system and method based on more AGV |
| US11099583B2 (en) * | 2019-05-10 | 2021-08-24 | Wing Aviation Llc | Real-time optimization of autonomous vehicle routes |
| CN112735184A (en) * | 2020-12-16 | 2021-04-30 | 上海蛛格科技有限公司 | Intelligent transportation system for realizing high-grade automatic driving and efficient transportation |
-
2021
- 2021-06-30 CN CN202110739529.5A patent/CN115540887A/en active Pending
-
2022
- 2022-06-29 EP EP22832118.8A patent/EP4365553A4/en active Pending
- 2022-06-29 WO PCT/CN2022/102418 patent/WO2023274306A1/en not_active Ceased
-
2023
- 2023-12-29 US US18/400,046 patent/US20240230361A9/en active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106382939A (en) * | 2015-12-20 | 2017-02-08 | 杭州后博科技有限公司 | System and method for predicating driving time on navigation path based on historical data |
| CN105788335A (en) * | 2016-04-05 | 2016-07-20 | 广东欧珀移动通信有限公司 | Navigation method and terminal |
| CN107782326A (en) * | 2016-08-31 | 2018-03-09 | 百度在线网络技术(北京)有限公司 | Method, apparatus and equipment for automobile navigation |
| CN111060121A (en) * | 2018-10-17 | 2020-04-24 | 腾讯大地通途(北京)科技有限公司 | Route selection method and device, storage medium and electronic device |
| CN109840632A (en) * | 2019-01-23 | 2019-06-04 | 中国联合网络通信集团有限公司 | A kind of traffic route assessment method and device for planning |
| CN112907945A (en) * | 2021-01-18 | 2021-06-04 | 阿里巴巴集团控股有限公司 | Road state determination and navigation route planning method and equipment |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116539044A (en) * | 2023-05-29 | 2023-08-04 | 中国联合网络通信集团有限公司 | Path optimization method, device, equipment and storage medium based on user urgency |
| CN116502988A (en) * | 2023-06-25 | 2023-07-28 | 深圳市壹站智汇科技有限公司 | Centralized and distributed combined path planning method, storage medium and equipment |
Also Published As
| Publication number | Publication date |
|---|---|
| US20240133706A1 (en) | 2024-04-25 |
| US20240230361A9 (en) | 2024-07-11 |
| WO2023274306A1 (en) | 2023-01-05 |
| EP4365553A4 (en) | 2024-12-04 |
| EP4365553A1 (en) | 2024-05-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20260012800A1 (en) | Systems and methods for matching an autonomous vehicle to a rider | |
| US20200239024A1 (en) | Autonomous vehicle routing with roadway element impact | |
| US20200309543A1 (en) | Monitoring autonomous vehicle route conformance for improved efficiency | |
| US9785145B2 (en) | Controlling driving modes of self-driving vehicles | |
| US12553732B2 (en) | Routing graph management in autonomous vehicle routing | |
| US11436926B2 (en) | Multi-autonomous vehicle servicing and control system and methods | |
| CN111882905B (en) | A method, system and electronic device for realizing road traffic reservation | |
| CN113160547A (en) | Automatic driving method and related equipment | |
| WO2021168845A1 (en) | Navigation method and apparatus | |
| JP7593719B2 (en) | Intelligent vehicle passing information sharing | |
| CN118922686A (en) | Including and using security and confidence information associated with an object in an autonomous driving map | |
| US20240227861A9 (en) | Vehicle Control Method, Apparatus, and System | |
| US11829135B2 (en) | Tuning autonomous vehicle dispatch using vehicle performance | |
| WO2023274264A1 (en) | Vehicle control method and apparatus, and system | |
| CN115547023A (en) | A vehicle control method, device and system | |
| US12025450B2 (en) | Route comparison for vehicle routing | |
| US20240133706A1 (en) | Path Planning Method, Server, and Vehicle | |
| US20210356965A1 (en) | Vehicle routing using third party vehicle capabilities | |
| CN118522137A (en) | Multi-lane mixed vehicle dynamic formation control method, device, equipment and medium | |
| US12049235B2 (en) | Routing feature flags | |
| WO2024169538A1 (en) | Vehicle control method, apparatus and system | |
| US12560444B2 (en) | Joint routing of transportation services for autonomous vehicles | |
| CN116206450A (en) | Control method, system and storage medium for vehicle | |
| Xing et al. | Design and Experiments of Automatic Vehicle Platoon Management with Connected Autonomous Vehicles in Mixed Traffic | |
| CN115547092A (en) | Vehicle control method, device and system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| TA01 | Transfer of patent application right | ||
| TA01 | Transfer of patent application right |
Effective date of registration: 20241108 Address after: 518129 Huawei Headquarters Office Building 101, Wankecheng Community, Bantian Street, Longgang District, Shenzhen, Guangdong Applicant after: Shenzhen Yinwang Intelligent Technology Co.,Ltd. Country or region after: China Address before: 518129 Bantian HUAWEI headquarters office building, Longgang District, Guangdong, Shenzhen Applicant before: HUAWEI TECHNOLOGIES Co.,Ltd. Country or region before: China |