CN115356711A - 外参标定方法及装置、智能机器人及计算机可读存储介质 - Google Patents
外参标定方法及装置、智能机器人及计算机可读存储介质 Download PDFInfo
- Publication number
- CN115356711A CN115356711A CN202211129242.1A CN202211129242A CN115356711A CN 115356711 A CN115356711 A CN 115356711A CN 202211129242 A CN202211129242 A CN 202211129242A CN 115356711 A CN115356711 A CN 115356711A
- Authority
- CN
- China
- Prior art keywords
- test
- external
- radar
- height
- heights
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/497—Means for monitoring or calibrating
Abstract
本申请公开了一种外参标定方法,用于为雷达进行外参标定,外参标定方法包括:在预定的外参范围内以预定的步长间隔生成多组测试外参;依据多组测试外参分别计算雷达检测的基准面的基准高度,并生成多组测试高度;获取多组测试高度中,与基准高度的差值最小的测试高度对应的测试外参为待选外参;判断待选外参对应的测试高度与基准高度的高度差是否在预设范围内;及若是,确定待选外参为雷达标定后的外参。本申请还公开了外参标定装置、智能机器人及计算机可读存储介质。本申请的外参标定方法操作简单,可以极大地节省雷达标定过程中的人力和时间成本,同时可以得到较高的标定精度。
Description
本申请是申请号为202010161044.8专利申请的分案申请(原申请的申请日为2020年3月10日,发明名称为外参标定方法及装置、智能机器人及计算机可读存储介质。
技术领域
本申请涉及传感器外参标定技术领域,更具体而言,涉及一种外参标定方法及装置、智能机器人及计算机可读存储介质。
背景技术
激光雷达传感器广泛应用于移动机器人的建图、定位以及导航避障等方面。移动机器人进行避障的前提是能够识别障碍物,对于地面上的障碍物,若要进行精确的识别,使用激光雷达传感器是首要选择。激光雷达的外参对于机器人能够准确无误地识别障碍物是非常重要的,这将直接影响机器人的整体性能。而对于实际的机器人,安装的误差难以避免,另外,机器人的长时间运行也会对激光雷达的外参造成影响,因此激光雷达的外参能够自动标定是非常急需的。使用人工标定的效率低下,精度较低。
发明内容
有鉴于此,本发明旨在至少在一定程度上解决相关技术中的问题之一。为此,本申请实施方式提供一种外参标定方法及装置、智能机器人及计算机可读存储介质。
本申请实施方式的外参标定方法用于为雷达进行外参标定,所述外参标定方法包括:在预定的外参范围内以预定的步长间隔生成多组测试外参;依据多组所述测试外参分别计算所述雷达检测的基准面的基准高度,并生成多组测试高度;获取多组所述测试高度中,与所述基准高度的差值最小的测试高度所对应的测试外参为待选外参;判断所述待选外参对应的测试高度与所述基准高度的高度差是否在预设范围内;及若是,确定所述待选外参为所述雷达标定后的外参。
本申请实施方式的外参标定方法,首先在预定的外参范围内以预定的步长间隔生成多组测试外参,然后依据多组测试外参分别计算雷达检测的基准面的基准高度,同时生成多组测试高度,获取多组测试高度中与基准高度差值最小的测试高度所对应的测试外参为待选外参,最后判断待选外参对应的测试高度与基准高度的高度差是否在预设范围内,若是,确定待选外参为雷达标定后的外参,由此,本申请的外参标定方法在多个测试外参中通过计算选择合适的外参,适用于任意角度安装的雷达,操作简单且可以极大地节省雷达标定过程中的人力和时间成本,同时可以得到较高的标定精度。
在一些实施方式中,所述依据多组所述测试外参分别计算所述雷达检测的基准面的基准高度,并生成多组测试高度,包括:获取所述基准面上的点云;过滤所述点云中被所述雷达的安装载体遮挡的点云,形成第一点云;及依据多组所述测试外参分别计算所述第一点云的高度,生成多组所述测试高度。
本实施方式中,首先获取基准面上的点云,然后过滤被雷达的安装载体遮挡的点云,形成第一点云,最后依据多组测试外参分别计算第一点云的高度,生成多组测试高度,由此,计算测试高度时均是有效的点云,避免了因被安装载体遮挡的点云计算测试高度而导致的误差,使取得的测试高度值更加准确。
在一些实施方式中,所述雷达能够相对于所述雷达的安装载体绕旋转轴旋转,所述外参标定方法还包括:依据所述雷达绕所述旋转轴旋转的角度范围设置角度间隔,以形成多个标定区域;及为所述雷达在每个所述标定区域内至少进行一次外参标定。
本实施方式中,雷达能够相对于雷达的安装载体绕旋转轴旋转,由此,雷达在安装载体上的安装位置不是固定的,首先依据雷达绕旋转轴旋转的角度范围设置角度间隔,形成了多个标定区域,同时为雷达在每个标定区域内至少进行一次外参标定,由此,雷达在每个标定区域内均能够得到一组标定后的外参,使得雷达在绕旋转轴旋转的过程中,雷达的外参始终为标定后的外参,使得雷达旋转至任意角度均能准确识别障碍物。
在一些实施方式中,所述雷达安装在智能机器人上,所述基准面为所述智能机器人的行驶表面,在所述依据多组所述测试外参分别计算所述雷达检测的基准面的基准高度,并生成多组测试高度前,所述外参标定方法还包括:控制所述智能机器人移动至预设范围内无障碍物,且所述行驶表面平整的位置。
本实施方式中,雷达安装在智能机器人上,基准面为智能机器人的行驶表面,控制智能机器人移动至预设范围无障碍物且行驶表面平整的位置,由此,可以避免因障碍物上的点云对计算的测试高度有影响,还可以避免行驶表面的不平整导致计算的测试高度不准确,进一步导致得到的外参不准确,由此使雷达可以得到准确的外参。
在一些实施方式中,所述外参包括所述雷达的安装高度、俯仰角及翻滚角。
本实施方式中,外参包括雷达的安装高度、俯仰角及翻滚角,由此,通过外参标定方法能够得到雷达最好的安装高度、俯仰角及翻滚角,从而使雷达能够更好的识别障碍物。
在一些实施方式中,所述获取多组所述测试高度中,与所述基准高度的差值最小的测试高度所对应的测试外参为待选外参,包括:与所述基准高度的差值最小的测试高度对应多组测试外参时,取第一次得到所述测试高度的测试外参为所述待选外参。
本实施方式中,当出现与基准高度的差值最小的测试高度对应多组测试外参时,取第一次得到最小测试高度的测试外参为待选外参,由此,可以避免有多组测试外参而无法确定待选外参的问题,同时取第一次的测试外参有利于减少误差,使得到的待选外参更加准确。
在一些实施方式中,所述外参标定方法还包括:在判断所述待选外参对应的测试高度与所述基准高度的高度差不在预设范围内时,重新设置所述外参范围和/或所述步长间隔。
本实施方式中,待选外参对应的测试高度与基准高度的高度差不在预设范围内时,重新设置外参范围及\或步长间隔,由此可以使雷达在进行重新外参标定时能够较大可能地得到合适的外参,避免因重复计算之前的数据而得不到合适的外参的情况发生。
本申请实施方式的外参标定装置,用于进行雷达的标定,应用于智能机器人,所述外参标定装置包括生成模块、计算模块、获取模块、判断模块及确定模块,所述生成模块用于在预定的外参范围内以预定的步长间隔生成多组测试外参;所述计算模块用于依据多组所述测试外参分别计算所述雷达检测的基准面的基准高度,并生成多组测试高度;所述设置模块用于获取多组所述测试高度中,与所述基准高度的差值最小的测试高度对应的测试外参为待选外参;所述判断模块用于判断所述待选外参对应的测试高度与所述基准高度的高度差是否在预设范围内;所述确定模块用于在所述判断模块的结果为是时,确定所述待选外参为所述雷达标定后的外参。
本申请实施方式的外参标定装置中,首先在预定的外参范围内以预定的步长间隔生成多组测试外参,然后依据多组测试外参分别计算雷达检测的基准面的基准高度,同时生成多组测试高度,获取多组测试高度中与基准高度差值最小的测试高度对应的测试外参为待选外参,最后判断待选外参对应的测试高度与基准高度的高度差是否在预设范围内,若是,确定待选外参为雷达标定后的外参,由此,本申请的外参标定方法在多个测试外参中通过计算选择合适的外参,适用于任意角度安装的雷达,操作简单且可以极大地节省雷达标定过程中的人力和时间成本,同时可以得到较高的标定精度。
在一些实施方式中,所述计算模块还用于:获取所述基准面上的点云;过滤所述点云中被所述雷达的安装载体遮挡的点云,形成第一点云;及依据多组所述测试外参分别计算所述第一点云的高度,生成多组所述测试高度。
本实施方式中,首先获取基准面上的点云,然后过滤被雷达的安装载体遮挡的点云,形成第一点云,最后依据多组测试外参分别计算第一点云的高度,生成多组测试高度,由此,计算测试高度时均是有效的点云,避免了因被安装载体遮挡的点云计算测试高度而导致的误差,使取得的测试高度值更加准确。
在一些实施方式中,所述雷达能够相对于所述雷达的安装载体绕旋转轴旋转,所述外参标定装置还用于:依据所述雷达绕所述旋转轴旋转的角度范围设置角度间隔,以形成多个标定区域;及为所述雷达在每个所述标定区域内至少进行一次外参标定。
本实施方式中,雷达能够相对于雷达的安装载体绕旋转轴旋转,由此,雷达在安装载体上的安装位置不是固定的,首先依据雷达绕旋转轴旋转的角度范围设置角度间隔,形成了多个标定区域,同时为雷达在每个标定区域内至少进行一次外参标定,由此,雷达在每个标定区域内均能够得到一组标定后的外参,使得雷达在绕旋转轴旋转的过程中,雷达的外参始终为标定后的外参,有利于雷达准确识别障碍物。
在一些实施方式中,所述雷达安装在智能机器人上,所述基准面为所述智能机器人的行驶表面,在所述依据多组所述测试外参分别计算所述雷达检测的基准面的基准高度,并生成多组测试高度前,所述外参标定装置还用于:控制所述智能机器人移动至预设范围内无障碍物,且所述行驶表面平整的位置。
本实施方式中,雷达安装在智能机器人上,基准面为智能机器人的行驶表面,控制智能机器人移动至预设范围无障碍物且行驶表面平整的位置,由此,可以避免因障碍物上的点云对计算的测试高度有影响,还可以避免行驶表面的不平整导致计算的测试高度不准确,进一步导致得到的外参不准确,由此使雷达可以得到准确的外参。
在一些实施方式中,所述外参标定装置用于标定所述雷达的安装高度、俯仰角及翻滚角。
本实施方式中,外参包括雷达的安装高度、俯仰角及翻滚角,由此,通过外参标定装置能够得到雷达最好的安装高度、俯仰角及翻滚角,从而使雷达能够更好的识别障碍物。
在一些实施方式中,所述获取模块还用于:与所述基准高度的差值最小的测试高度对应多组测试外参时,取第一次得到所述测试高度的测试外参为所述待选外参。
本实施方式中,当出现与基准高度的差值最小的测试高度对应多组测试外参时,取第一次得到最小测试高度的测试外参为待选外参,由此,可以避免有多组测试外参而无法确定待选外参的问题,同时取第一次的测试外参有利于减少误差,使得到的待选外参更加准确。
在一些实施方式中,所述确定模块还用于:在判断所述待选外参对应的测试高度与所述基准高度的高度差不在预设范围内时,重新设置所述外参范围和/或所述步长间隔。
本实施方式中,待选外参对应的测试高度与基准高度的高度差不在预设范围内时,重新设置外参范围及\或步长间隔,由此可以使雷达在进行重新外参标定时能够较大可能地得到合适的外参,避免因重复计算之前的数据而得不到合适的外参的情况发生。
本申请实施方式的智能机器人包括一个或多个处理器、存储器;和一个或多个程序,其中所述一个或多个程序被存储在所述存储器中,并且被所述一个或多个处理器执行,所述程序包括用于执行上述任一实施方式所述的外参标定方法的指令。
本申请实施方式的智能机器人中,首先在预定的外参范围内以预定的步长间隔生成多组测试外参,然后依据多组测试外参分别计算雷达检测的基准面的基准高度,同时生成多组测试高度,获取多组测试高度中与基准高度差值最小的测试高度所对应的测试外参为待选外参,最后判断待选外参对应的测试高度与基准高度的高度差是否在预设范围内,若是,确定待选外参为雷达标定后的外参,由此,本申请的外参标定方法在多个测试外参中通过计算选择合适的外参,适用于任意角度安装的雷达,操作简单且可以极大地节省雷达标定过程中的人力和时间成本,同时可以得到较高的标定精度。
本申请实施方式的计算机可读存储介质,,当所述计算机可执行指令被一个或多个处理器执行时,使得所述处理器执行任一实施方式所述的外参标定方法。
本申请实施方式的计算机可读存储介质中,首先在预定的外参范围内以预定的步长间隔生成多组测试外参,然后依据多组测试外参分别计算雷达检测的基准面的基准高度,同时生成多组测试高度,获取多组测试高度中与基准高度差值最小的测试高度所对应的测试外参为待选外参,最后判断待选外参对应的测试高度与基准高度的高度差是否在预设范围内,若是,确定待选外参为雷达标定后的外参,由此,本申请的外参标定方法在多个测试外参中通过计算选择合适的外参,适用于任意角度安装的雷达,操作简单且可以极大地节省雷达标定过程中的人力和时间成本,同时可以得到较高的标定精度。
本申请的实施方式的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本申请的实施方式的实践了解到。
附图说明
本申请的上述和/或附加的方面和优点从结合下面附图对实施方式的描述中将变得明显和容易理解,其中:
图1是本申请一些实施方式的外参标定方法的流程示意图;
图2是本申请一些实施方式的智能机器人的模块示意图;
图3是本申请一些实施方式的外参标定装置的模块示意图;
图4是本申请一些实施方式的外参标定方法的流程示意图;
图5是本申请一些实施方式的智能机器人的结构示意图;
图6是本申请一些实施方式的智能机器人的结构示意图;
图7是本申请一些实施方式的外参标定方法的场景示意图;
图8是本申请一些实施方式的外参标定方法的场景示意图;
图9是本申请一些实施方式的外参标定方法的流程示意图;
图10是本申请一些实施方式的外参标定方法的场景示意图;
图11是本申请一些实施方式的外参标定方法的场景示意图;
图12是本申请一些实施方式的外参标定方法的流程示意图;
图13是本申请一些实施方式的外参标定方法的流程示意图;
图14是本申请一些实施方式的外参标定方法的流程示意图;
图15是本申请一些实施方式的外参标定方法的流程示意图;
图16是本申请一些实施方式的计算机可读存储介质和处理器的连接示意图。
具体实施方式
以下结合附图对本申请的实施方式作进一步说明。附图中相同或类似的标号自始至终表示相同或类似的元件或具有相同或类似功能的元件。
另外,下面结合附图描述的本申请的实施方式是示例性的,仅用于解释本申请的实施方式,而不能理解为对本申请的限制。
在本申请中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
请参阅图1及图2,本申请实施方式的外参标定方法用于为雷达40进行外参标定,外参标定方法包括步骤:
S010:在预定的外参范围内以预定的步长间隔生成多组测试外参;
S020:依据多组测试外参分别计算雷达40检测的基准面的基准高度,并生成多组测试高度;
S030:获取多组测试高度中,与基准高度的差值最小的测试高度所对应的测试外参为待选外参;
S040:判断待选外参对应的测试高度与基准高度的高度差是否在预设范围内;和
S050:若是,确定待选外参为雷达40标定后的外参。
本申请实施方式的智能机器人100包括一个或多个处理器10、存储器20及一个或多个程序,其中一个或多个程序被存储在存储器20中切被一个或多个处理器10执行,程序包括用于执行本申请实施方式的外参标定方法的指令。处理器10执行程序时,程序10可用于实施步骤S010、步骤S020、步骤S030、步骤S040及步骤S050,即,处理器10可用于:在预定的外参范围内以预定的步长间隔生成多组测试外参;依据多组测试外参分别计算雷达40检测的基准面的基准高度,并生成多组测试高度;获取多组测试高度中,与基准高度的差值最小的测试高度所对应的测试外参为待选外参;判断待选外参对应的测试高度与基准高度的高度差是否在预设范围内;及若是,确定待选外参为雷达40标定后的外参。
请参阅图3,本申请实施方式的外参标定装置200包括生成模块210、计算模块220、获取模块230、判断模块240及确定模块250,生成模块210、计算模块220、获取模块230、判断模块240及确定模块250可分别用于实施步骤S010、步骤S020、步骤S030、步骤S040及步骤S050。即,生成模块210用于在预定的外参范围内以预定的步长间隔生成多组测试外参;计算模块220用于依据多组测试外参分别计算雷达40检测的基准面的基准高度,并生成多组测试高度;获取模块230用于获取多组测试高度中,与基准高度的差值最小的测试高度所对应的测试外参为待选外参;判断模块240用于判断待选外参对应的测试高度与基准高度的高度差是否在预设范围内;及确定模块250用于判断模块240的结果为是时,确定待选外参为雷达40标定后的外参。
本申请实施方式的外参标定方法、外参标定装置200及智能机器人100中,首先在预定的外参范围内以预定的步长间隔生成多组测试外参,然后依据多组测试外参分别计算雷达40检测的基准面的基准高度,同时生成多组测试高度,获取多组测试高度中与基准高度差值最小的测试高度所对应的测试外参为待选外参,最后判断待选外参对应的测试高度与基准高度的高度差是否在预设范围内,若是,确定待选外参为雷达40标定后的外参,由此,本申请的外参标定方法在多个测试外参中通过计算选择合适的外参,适用于任意角度安装的雷达40,操作简单还可以极大地节省雷达40标定过程中的人力和时间成本,同时可以得到较高的标定精度。
其中,智能机器人100可以是工业机器人、农业机器人、家庭机器人、服务机器人、清洁机器人等,在此不做限制。进一步地,清洁机器人可以是扫地机、洗地机、吸尘器等智能机器人100。智能机器人100还可以包括通信接口30、清洁执行装置等元件。智能机器人100可以用于清洁地板、地砖、路面或者水泥地等表面。其中雷达40可以是激光雷达、微波雷达、毫米波雷达等,在此不做限制。
进一步地,本申请实施方式以雷达40的安装载体为智能机器人100为例进行展开说明,可以理解,雷达40的安装载体可以是其他,在此不做限制。同时以雷达40为激光雷达进行功能性说明,雷达40可以是其他类型的雷达,在此不做限制
具体地,雷达40安装在智能机器人100上,可以用于智能机器人100的建图、定位以及导航避障等方面。在步骤S010中,在预定的外参范围内以预定的步长间隔生成多组测试外参,预定的外参范围可以是用户自己设置的外参范围,外参范围为进行外参标定时外参的取值范围,其中,不同的外参可以设置不同的外参范围,外参范围可以是多种外参的组合,例如外参范围可以包括安装高度范围、俯仰角变化范围、翻滚角变化范围、航向角的外参范围等的组合,在此不做限制。
在步骤S020中,依据多组测试外参分别计算雷达40检测的基准面的基准高度,并生成多组测试高度,由于基准面本身具有一个基准高度,通过外参来计算基准面的基准高度从而得到测试高度,由此能够更好地比较测试高度与基准高度的差异,同时在步骤S010中生成了多组测试外参,依据每组测试外参分别计算雷达40检测的基准面的基准高度,均能得到一个测试高度,由此,通过判断测试高度的准确性则可以用来反推测试外参的准确性,同时基准面相同有利于后续选取待选外参。基准面可以是高度为任意高度的平面,例如基准面为地面、楼面、或与地面平行的标定板等。
在步骤S030中,获取多组测试高度中,与基准高度的差值最小的测试高度所对应的测试外参为待选外参,在步骤S020中得到了多组测试高度,由于基准面客观存在一个基准高度,依据测试外参得到的测试高度与基准高度之间的高度差最小,即为测试高度越接近于基准高度,表明此时对应的外参为比较准确的外参,误差较小,由此,从多组测试高度中获取与基准高度的差值最小的测试高度对应的测试外参为待选外参,待选外参的选择更加接近于最准确的外参。其中,差值可以是指测试高度与基准高度的差的绝对值,差值可以是用户设置的,可以是0.05米、0.03米、0.01米、0.04米、0.08米等,在此不做限制。
在步骤S040中,判断待选外参对应的测试高度与基准高度的高度差是否在预设范围内,其中预设范围可以是用户设置的范围,表明用户能够接受的误差,其中,由于待选外参所对应的测试高度与基准高度的高度差最小,因此只要判断该最小的高度差是否超过预设范围即可确定待选外参是否为合适的外参。
进一步地,在步骤S040中的结果为是时,执行步骤S050,确定所述待选外参为所述雷达40标定后的外参。即待选外参所对应的测试高度与基准高度之间的高度差在预设范围内,表明雷达40的外参为待选外参时,雷达40所获取的数据比较准确,误差较小,由此,本申请实施方式的外参标定方法能够对雷达40进行外参标定,使雷达40能够准确的获取数据。
其中,请参阅图4,在一些实施方式中,步骤S010包括:
步骤S011:设置外参的初始值、外参范围及步长间隔;
步骤S012:从初始值开始持续累加一个步长间隔,每累加一个步长间隔生成一组测试外参;和
步骤S013:直至测试外参覆盖外参范围,结束累加步长间隔,生成多组测试外参。
首先设置外参的初始值、外参范围及步长间隔,从初始值开始持续累加一个步长间隔,每累加一个步长间隔生成一组测试外参,直至测试外参能够覆盖外参范围,由此,能够生成较多的测试外参,有利于获取到最合适的标定外参。其中,步长间隔、初始值、外参范围均可以是用户自己设置的。
请参阅图5及图6,雷达40包括有多个外参,其中在一些实施方式中,外参包括安装高度z、俯仰角pitch、翻滚角roll,其中,安装高度z为雷达40与智能机器人100底部之间的距离,俯仰角pitch为雷达40与水平面之间的夹角,翻滚角roll为雷达40与竖直面之间的夹角。本实施方式的外参标定方法能够对雷达40的安装高度z、俯仰角pitch及翻滚角roll进行标定,使雷达40能够得到合适的安装高度z、俯仰角pitch及翻滚角roll,使雷达40障碍物识别得更加准确。当然,除了安装高度z、俯仰角pitch及翻滚角roll这些外参,还可以标定别的外参。
请结合图4,在一个实施例中,雷达40为激光雷达,需要标定的激光雷达的外参为安装高度z、俯仰角pitch及翻滚角roll。其中,安装高度z、俯仰角pitch及翻滚角roll的初始值分别为:z=0.4m、pitch=30°、roll=5°,安装高度z、俯仰角pitch及翻滚角roll的外参范围为:delta_z=0.05m、delta_pitch=5°、delta_roll=2°,步长间隔为:step_z=0.01m,step_pitch=0.5°,step_roll=0.2°,其中可以是从安装高度z开始累加一个步长间隔step_z,也可以是从俯仰角pitch开始累加一个步长间隔step_pitch,还可以是从翻滚角roll开始累加一个步长间隔step_roll,在此不做限制。持续累加步长间隔,直至安装高度z、俯仰角pitch及翻滚角roll均已覆盖完对应的外参范围,即安装高度z的测试外参覆盖完delta_z,俯仰角pitch的测试外参覆盖完delta_pitch,翻滚角roll的测试外参覆盖完delta_roll,从而结束累加,生成多组测试外参,由此,激光雷达在安装位置z、俯仰角pitch、翻滚角roll三个外参上均实现了遍历,可以适用于多种角度安装的激光雷达。
生成模块210还可用于执行步骤S011、S012及S013,处理器10还可用于执行步骤S011、步骤S012及步骤S013。
请参阅图7至图9,在一些实施方式中,步骤S020包括步骤:
S021:获取基准面上的点云;
S022:过滤点云中被雷达40的安装载体遮挡的点云,形成第一点云D;及
S023:依据多组测试外参分别计算第一点云D的高度,生成多组测试高度。
本实施方式中,首先获取基准面上的点云,然后过滤点云中被雷达40的安装载体遮挡的点云,形成第一点云D,最后依据多组测试外参分别计算第一点云D的高度,生成多组测试高度,若点云被安装载体遮挡,可能造成计算时用于计算的点云为安装载体上的点云,从而造成的误差较大,由此过滤点云中被雷达40的安装载体遮挡的点云能够使计算的测试高度更加准确。
具体地,雷达40获取基准面上的点云,若获取的点云中有点云被智能机器人100遮挡,例如图7中被智能机器人100遮挡的点云,用虚线框框中的点云即为被智能机器人100遮住的点云,则对被智能机器人100遮挡的点云进行过滤,即将虚线框中的点云过滤掉,过滤剩下的点云即为第一点云D,若获取的点云均未被雷达40的安装载体遮挡,例如图8中,基准面上的点云未被智能机器人100遮挡,则获取的点云即为第一点云D。
进一步地,在一个实施例中,需要标定的雷达40的外参为安装高度z、俯仰角pitch及翻滚角roll,其中点云在雷达40坐标系下的坐标为(x,y),其中安装高度z、俯仰角pitch及翻滚角roll为基准坐标系下的外参,在步骤S010中得到了多组测试外参,即多组安装高度z、俯仰角pitch及翻滚角roll的组合,由此在步骤S020中,计算雷达40监测的基准面的基准高度的公式为h的计算公式为:hi=|z-xsin(pitch)+ycos(pitch)sin(roll)|,将多个外参对应的z、pitch及roll代入计算基准高度h的计算公式中,从而通过计算基准高度的方式,能够计算得出多组测试高度。
计算模块220还可用于执行步骤S021、S022及S023,处理器10还可用于执行步骤S021、步骤S022及步骤S023。
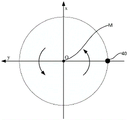
请参阅图10至图12,在一些实施方式中,雷达40能够相对于雷达40的安装载体绕旋转轴M旋转,外参标定方法还包括步骤:
S001:依据雷达40绕旋转轴M旋转的角度范围设置角度间隔α,以形成多个标定区域X;和
S002:为雷达40在每个标定区域X内至少进行一次外参标定
具体地,以安装载体为智能机器人100为例说明,雷达40在智能机器人100上的安装位置不固定,在不同安装位置下,雷达40的外参也不尽相同,因此对于不同安装位置的外参,均需要进行标定。雷达40可以在智能机器人100上旋转,其中,雷达40可以是围绕智能机器人100的中心旋转,此时智能机器人100的中心即为旋转轴M,雷达40也可以是围绕智能机器人100上的某个旋转轴旋转,在此不做限制。同时依据雷达40绕旋转轴M的旋转角度范围设置角度间隔α,将旋转角度范围分成多个标定区域X,然后雷达40在每个标定区域X至少进行一次执行外参标定,即至少执行一次步骤S010、步骤S020、步骤S030、步骤S040及步骤S050。
首先依据雷达40能绕旋转轴旋转的角度范围设置角度间隔,分成多个标定区域,最后在每个标定区域内至少进行一次外参标定,由此,雷达40在旋转的过程中能够时刻保持合适的外参获取数据,有利于雷达40进行避障、建图等。其中,角度间隔可以是用户根据雷达40的安装载体的机械结构情况设置的,其中角度间隔受驱动电机的约束,当角度间隔越小时,对驱动电机的要求越高。
在一个实施例中,请结合图10及图11,雷达40可绕旋转轴M旋转360°,其中角度间隙在[5°,360°]之间,在角度间隙为5°时,雷达40至少需要进行标定的次数N=360°/5°=72。在角度间隙为360°时,雷达40至少需要进行的标定次数N=360°/360°=1。其中,角度间隔小于5°的情况下,雷达40转动一个角度间隙时的外参变化不大,同时角度间隙越小在进行计算测试高度时计算次数越多,需要较长的时间,降低工作效率,由此,角度间隙在[5°,360°]之间能够取得较好的效果,同时计算量也比较小。
在一个实施例中,角度间隙为15°,雷达40为激光雷达,激光雷达可绕旋转轴M旋转360°,激光雷达至少需要进行标定的次数N=360°/15°=24由此,激光雷达在绕旋转轴M旋转的情况下,校准次数较少,还能得到较好的外参,使得激光雷达的标定效率较高。
外参标定装置200还可用于执行步骤S001及步骤S002,处理器10还可用于执行步骤S001及步骤S002。
请参阅图13,在一些实施方式中,雷达40安装在智能机器人100上,基准面为智能机器人100的行驶表面,在执行步骤S020前,即在执行“依据多组测试外参分别计算雷达40检测的基准面的基准高度,并生成多组测试高度”之前,外参标定方法还包括:
步骤S014:控制智能机器人100移动至预设范围内无障碍物,且行驶表面平整的位置。
具体地,基准面为智能机器人100的行驶表面,即智能机器人100在基准面上行驶,此时基准面的理论基准高度应该为零,若基准面为行驶表面时,如果行驶表面凹凸不平,雷达40检测到的基准高度也会存在差异,从而使最后得到的外参存在较大的误差,影响雷达40识别障碍物,进一步地,若智能机器人100的预设范围内存在障碍物,那么雷达40在检测基准面的基准高度时可能检测到的基准高度为障碍物的基准高度,从而导致外参的结果不准确,雷达40在后续的工作中无法正确识别障碍物。将智能机器人100移动至预设范围内无障碍物,且行驶表面平整的位置,能够降低计算最后外参的误差,有利于雷达40识别障碍物。其中,预设范围可以是用户设置的范围,也可以是雷达40能够检测到的范围,在此不做限制。
外参标定装置200还可用于执行步骤S014,处理器10还可用于执行步骤S014。
请参阅图14,在一些实施方式中,步骤S030还包括:
步骤S031:与基准高度的差值最小的测试高度对应多组测试外参时,取第一次得到测试高度的测试外参为待选外参。
具体地,依据多组测试外参均可以计算出对应的测试高度,其中可能存在测试高度相同的情况,即一个测试高度对应有多组测试外参,为了避免造成多组测试外参而导致雷达40标定的外参出现差异,取第一次得到测试高度的测试外参为待选外参,由此,使雷达40标定的外参结果更加准确,同时还可以减少计算量。
获取模块230还可用于执行步骤S031,处理器10还可用于执行步骤S031。
请参阅图15,在一些实施方式中,在步骤S040的输出结果为否时,执行
步骤S051:若否,重新设置外参范围和/或步长间隔。
具体地,步骤S040的输出结果为否时,即判断待选外参对应的测试高度与基准高度的高度差不在预设范围内,重新设置外参范围和/或步长间隔,可以是重新设置外参范围,也可以是重新设置步长间隔,还可以是重新设置外参范围及步长间隔,重新设置外参范围和/或步长间隔,由此雷达40再次进行外参标定时,较大可能的能够获取到合适的外参。
在一个实施例中,外参范围:delta_z=0.05m、delta_pitch=5°、delta_roll=2°,步长间隔为:step_z=0.01m、step_pitch=0.5°、step_roll=0.2°,在该外参范围及步长间隔内没有得到合适的外参,可以将delta_z、delta_pitch及delta_roll中的至少一个减小或者增大,也可以将step_z、step_pitch及step_roll中的至少一个减小或者增大,还可以同时将delta_z、delta_pitch、delta_roll中的至少一个减小或者增大及step_z、step_pitch、step_roll中至少一个减小或者增大,以便于在后续步骤中能够得到最合适的z、pitch及roll。
确定模块250还可用于执行步骤S051,处理器10还可用于执行步骤S051。
请再次参阅图2,在一些实施方式中,存储器20用于存放可在处理器10上运行的计算机程序,处理器10执行程序时实现上述任一实施方式中的外参标定方法。
存储器20可能包含高速RAM存储器,也可能还包括非易失性存储器(non-volatilememory),例如至少一个磁盘存储器。进一步地,智能机器人100还可包括通信接口30,通信接口30用于存储器20和处理器10之间的通信。
如果存储器20、处理器10和通信接口30独立实现,则通信接口30、存储器20和处理器10可以通过总线相互连接并完成相互间的通信。总线可以是工业标准体系结构(Industry Standard Architecture,简称为ISA)总线、外部设备互连(PeripheralComponent,简称为PCI)总线或扩展工业标准体系结构(Extended Industry StandardArchitecture,简称为EISA)总线等。总线可以分为地址总线、数据总线、控制总线等。为便于表示,图10中仅用一条粗线表示,但并不表示仅有一根总线或一种类型的总线。
可选的,在具体实现上,如果存储器20、处理器10及通信接口30,集成在一块芯片上实现,则存储器20、处理器10及通信接口30可以通过内部接口完成相互间的通信。
处理器10可能是一个中央处理器(Central Processing Unit,简称为CPU),或者是特定集成电路(Application Specific Integrated Circuit,简称为ASIC),或者是被配置成实施本申请实施例的一个或多个集成电路。
请参阅图16,本申请实施方式的非易失性计算机可读存储介质300包括计算机可执行指令301,当计算机可执行指令被一个或多个处理器400执行时,使得处理器400执行本申请任一实施方式的外参标定方法。
例如,计算可执行指令被处理器400执行时,处理器400用于实施步骤:
S010:在预定的外参范围内以预定的步长间隔生成多组测试外参;
S020:依据多组测试外参分别计算雷达40检测的基准面的基准高度,并生成多组测试高度;
S030:获取多组测试高度中,与基准高度的差值最小的测试高度所对应的测试外参为待选外参;
S040:判断待选外参对应的测试高度与基准高度的高度差是否在预设范围内;和
S050:若是,确定待选外参为雷达40标定后的外参。
其上存储有计算机程序,该程序被处理器400执行时实现如上的外参标定方法。
流程图中或在此以其他方式描述的任何过程或方法描述可以被理解为,表示包括一个或更多个用于实现定制逻辑功能或过程的步骤的可执行指令的代码的模块、片段或部分,并且本申请的优选实施方式的范围包括另外的实现,其中可以不按所示出或讨论的顺序,包括根据所涉及的功能按基本同时的方式或按相反的顺序,来执行功能,这应被本申请的实施例所属技术领域的技术人员所理解。
在流程图中表示或在此以其他方式描述的逻辑和/或步骤,例如,可以被认为是用于实现逻辑功能的可执行指令的定序列表,可以具体实现在任何计算机可读介质中,以供指令执行系统、装置或设备(如基于计算机的系统、包括处理器的系统或其他可以从指令执行系统、装置或设备取指令并执行指令的系统)使用,或结合这些指令执行系统、装置或设备而使用。就本说明书而言,"计算机可读介质"可以是任何可以包含、存储、通信、传播或传输程序以供指令执行系统、装置或设备或结合这些指令执行系统、装置或设备而使用的装置。计算机可读介质的更具体的示例(非穷尽性列表)包括以下:具有一个或多个布线的电连接部(电子装置),便携式计算机盘盒(磁装置),随机存取存储器(RAM),只读存储器(ROM),可擦除可编辑只读存储器(EPROM或闪速存储器),光纤装置,以及便携式光盘只读存储器(CDROM)。另外,计算机可读介质甚至可以是可在其上打印所述程序的纸或其他合适的介质,因为可以例如通过对纸或其他介质进行光学扫描,接着进行编辑、解译或必要时以其他合适方式进行处理来以电子方式获得所述程序,然后将其存储在计算机存储器中。
应当理解,本申请的各部分可以用硬件、软件、固件或它们的组合来实现。在上述实施方式中,多个步骤或方法可以用存储在存储器中且由合适的指令执行系统执行的软件或固件来实现。如,如果用硬件来实现和在另一实施方式中一样,可用本领域公知的下列技术中的任一项或他们的组合来实现:具有用于对数据信号实现逻辑功能的逻辑门电路的离散逻辑电路,具有合适的组合逻辑门电路的专用集成电路,可编程门阵列(PGA),现场可编程门阵列(FPGA)等。
本技术领域的普通技术人员可以理解实现上述实施例方法携带的全部或部分步骤是可以通过程序来指令相关的硬件完成,所述的程序可以存储于一种计算机可读存储介质中,该程序在执行时,包括方法实施例的步骤之一或其组合。
此外,在本申请各个实施例中的各功能单元可以集成在一个处理模块中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个模块中。上述集成的模块既可以采用硬件的形式实现,也可以采用软件功能模块的形式实现。所述集成的模块如果以软件功能模块的形式实现并作为独立的产品销售或使用时,也可以存储在一个计算机可读取存储介质中。上述提到的存储介质可以是只读存储器,磁盘或光盘等。
在本说明书的描述中,参考术语“某些实施方式”、“一个实施方式”、“一些实施方式”、“示意性实施方式”、“示例”、“具体示例”、或“一些示例”的描述意指结合所述实施方式或示例描述的具体特征、结构、材料或者特点包含于本申请的至少一个实施方式或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施方式或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施方式或示例中以合适的方式结合。
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个所述特征。在本申请的描述中,“多个”的含义是至少两个,例如两个,三个,除非另有明确具体的限定。
尽管上面已经示出和描述了本申请的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本申请的限制,本领域的普通技术人员在本申请的范围内可以对上述实施例进行变化、修改、替换和变型,本申请的范围由权利要求及其等同物限定。
Claims (9)
1.一种雷达的外参标定方法,其特征在于,所述外参标定方法包括:
在预定的外参范围内以预定的步长间隔生成多组测试外参;
依据多组所述测试外参分别计算所述雷达检测的基准面的基准高度,并生成多组测试高度;
获取多组所述测试高度中,与所述基准高度的差值最小的测试高度所对应的测试外参为待选外参;
判断所述待选外参对应的测试高度与所述基准高度的高度差是否在预设范围内;及
若是,确定所述待选外参为所述雷达标定后的外参;
所述依据多组所述测试外参分别计算所述雷达检测的基准面的基准高度,并生成多组测试高度,包括:
获取所述基准面上的点云;
过滤所述点云中被所述雷达的安装载体遮挡的点云,形成第一点云;及
依据多组所述测试外参分别计算所述第一点云的高度,生成多组所述测试高度。
2.根据权利要求1所述的外参标定方法,其特征在于,所述雷达能够相对于所述雷达的安装载体绕旋转轴旋转,所述外参标定方法还包括:
依据所述雷达绕所述旋转轴旋转的角度范围设置角度间隔,以形成多个标定区域;及
为所述雷达在每个所述标定区域内至少进行一次外参标定。
3.根据权利要求1所述的外参标定方法,其特征在于,所述雷达安装在智能机器人上,所述基准面为所述智能机器人的行驶表面,在所述依据多组所述测试外参分别计算所述雷达检测的基准面的基准高度,并生成多组测试高度之前,所述外参标定方法还包括:
控制所述智能机器人移动至预设范围内无障碍物,且所述行驶表面平整的位置。
4.根据权利要求1所述的外参标定方法,其特征在于,所述外参包括所述雷达的安装高度、俯仰角及翻滚角。
5.根据权利要求1所述的外参标定方法,其特征在于,所述获取多组所述测试高度中,与所述基准高度的差值最小的测试高度所对应的测试外参为待选外参,包括:
与所述基准高度的差值最小的测试高度对应多组测试外参时,取第一次得到所述测试高度的测试外参为所述待选外参。
6.根据权利要求1所述的外参标定方法,其特征在于,所述外参标定方法还包括:
在判断所述待选外参对应的测试高度与所述基准高度的高度差不在预设范围内时,重新设置所述外参范围和/或所述步长间隔。
7.一种雷达的外参标定装置,应用于智能机器人,其特征在于,所述外参标定装置包括:
生成模块,所述生成模块用于在预定的外参范围内以预定的步长间隔生成多组测试外参;
计算模块,所述计算模块用于依据多组所述测试外参分别计算所述雷达检测的基准面的基准高度,并生成多组测试高度;
所述依据多组所述测试外参分别计算所述雷达检测的基准面的基准高度,并生成多组测试高度,包括:
获取所述基准面上的点云;
过滤所述点云中被所述雷达的安装载体遮挡的点云,形成第一点云;及
依据多组所述测试外参分别计算所述第一点云的高度,生成多组所述测试高度
获取模块,所述获取模块用于获取多组所述测试高度中,与所述基准高度的差值最小的测试高度对应的测试外参为待选外参;
判断模块,所述判断模块用于判断所述待选外参对应的测试高度与所述基准高度的高度差是否在预设范围内;
确定模块,所述确定模块用于在所述判断模块的结果为是时,确定所述待选外参为所述雷达标定后的外参。
8.一种智能机器人,其特征在于,所述智能机器人包括:
一个或多个处理器、存储器;和
一个或多个程序,其中所述一个或多个程序被存储在所述存储器中,并且被所述一个或多个处理器执行,所述程序包括用于执行权利要求1至6任意一项所述的外参标定方法的指令。
9.一种包含计算机可执行指令的非易失性计算机可读存储介质,当所述计算机可执行指令被一个或多个处理器执行时,使得所述处理器执行权利要求1至6中任意一项所述的外参标定方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211129242.1A CN115356711A (zh) | 2020-03-10 | 2020-03-10 | 外参标定方法及装置、智能机器人及计算机可读存储介质 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010161044.8A CN111289957B (zh) | 2020-03-10 | 2020-03-10 | 外参标定方法及装置、智能机器人及计算机可读存储介质 |
| CN202211129242.1A CN115356711A (zh) | 2020-03-10 | 2020-03-10 | 外参标定方法及装置、智能机器人及计算机可读存储介质 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202010161044.8A Division CN111289957B (zh) | 2020-03-10 | 2020-03-10 | 外参标定方法及装置、智能机器人及计算机可读存储介质 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN115356711A true CN115356711A (zh) | 2022-11-18 |
Family
ID=71020653
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202010161044.8A Active CN111289957B (zh) | 2020-03-10 | 2020-03-10 | 外参标定方法及装置、智能机器人及计算机可读存储介质 |
| CN202211129242.1A Pending CN115356711A (zh) | 2020-03-10 | 2020-03-10 | 外参标定方法及装置、智能机器人及计算机可读存储介质 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202010161044.8A Active CN111289957B (zh) | 2020-03-10 | 2020-03-10 | 外参标定方法及装置、智能机器人及计算机可读存储介质 |
Country Status (1)
| Country | Link |
|---|---|
| CN (2) | CN111289957B (zh) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112414431B (zh) * | 2020-11-18 | 2023-05-12 | 的卢技术有限公司 | 一种鲁棒的车载多传感器外参标定方法 |
| CN114152935B (zh) * | 2021-11-19 | 2023-02-03 | 苏州一径科技有限公司 | 一种雷达外参标定精度的评估方法、装置及设备 |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101957990B (zh) * | 2010-08-13 | 2012-07-04 | 武汉大学 | 一种摄像机定标方法、图像处理设备和机动车辆 |
| CN106996795B (zh) * | 2016-01-22 | 2019-08-09 | 腾讯科技(深圳)有限公司 | 一种车载激光外参标定方法和装置 |
| CN107102303B (zh) * | 2016-02-23 | 2024-03-19 | 中国科学院电子学研究所 | 机载混合顺轨-交轨干涉合成孔径雷达系统的定标方法 |
| CN109118542B (zh) * | 2017-06-22 | 2021-11-23 | 阿波罗智能技术(北京)有限公司 | 激光雷达与相机之间的标定方法、装置、设备及存储介质 |
| CN107564069B (zh) * | 2017-09-04 | 2020-09-29 | 北京京东尚科信息技术有限公司 | 标定参数的确定方法、装置及计算机可读存储介质 |
| CN109521403B (zh) * | 2017-09-19 | 2020-11-20 | 百度在线网络技术(北京)有限公司 | 多线激光雷达的参数标定方法及装置、设备及可读介质 |
| CN108613697A (zh) * | 2018-05-31 | 2018-10-02 | 北京智行者科技有限公司 | 用于对车辆传感器的参数进行标定的设备和方法 |
| CN109001711B (zh) * | 2018-06-05 | 2020-06-26 | 北京智行者科技有限公司 | 多线激光雷达标定方法 |
| CN110376570A (zh) * | 2018-07-09 | 2019-10-25 | 北京京东尚科信息技术有限公司 | 对扫描仪坐标系与imu坐标系进行标定的方法、系统和设备 |
| CN109146978B (zh) * | 2018-07-25 | 2021-12-07 | 南京富锐光电科技有限公司 | 一种高速相机成像畸变校准装置及方法 |
| CN109061610A (zh) * | 2018-09-11 | 2018-12-21 | 杭州电子科技大学 | 一种摄像头与雷达的联合标定方法 |
| CN110609268B (zh) * | 2018-11-01 | 2022-04-29 | 驭势科技(北京)有限公司 | 一种激光雷达标定方法、装置、系统及存储介质 |
| CN109597037B (zh) * | 2018-11-29 | 2023-06-16 | 惠州华阳通用电子有限公司 | 一种雷达标定方法及装置 |
| CN109696663B (zh) * | 2019-02-21 | 2021-02-09 | 北京大学 | 一种车载三维激光雷达标定方法和系统 |
| CN110021046B (zh) * | 2019-03-05 | 2021-11-19 | 中国科学院计算技术研究所 | 相机与激光雷达组合传感器的外参数标定方法及系统 |
| CN110132130A (zh) * | 2019-03-05 | 2019-08-16 | 上海宾通智能科技有限公司 | 激光雷达位置标定方法、系统及其数据处理方法、系统 |
| CN109949372B (zh) * | 2019-03-18 | 2021-12-10 | 北京智行者科技有限公司 | 一种激光雷达与视觉联合标定方法 |
| CN110031824B (zh) * | 2019-04-12 | 2020-10-30 | 杭州飞步科技有限公司 | 激光雷达联合标定方法及装置 |
| CN110349221A (zh) * | 2019-07-16 | 2019-10-18 | 北京航空航天大学 | 一种三维激光雷达与双目可见光传感器的融合标定方法 |
| CN110488234B (zh) * | 2019-08-30 | 2021-09-10 | 北京百度网讯科技有限公司 | 车载毫米波雷达的外参标定方法、装置、设备及介质 |
| CN110686704A (zh) * | 2019-10-18 | 2020-01-14 | 深圳市镭神智能系统有限公司 | 激光雷达与组合惯导的位姿标定方法、系统及介质 |
-
2020
- 2020-03-10 CN CN202010161044.8A patent/CN111289957B/zh active Active
- 2020-03-10 CN CN202211129242.1A patent/CN115356711A/zh active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| CN111289957A (zh) | 2020-06-16 |
| CN111289957B (zh) | 2022-08-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111190153B (zh) | 外参标定方法及装置、智能机器人及计算机可读存储介质 | |
| CN110553652B (zh) | 机器人多传感器融合定位方法及其应用 | |
| US11977390B2 (en) | Method for straight edge detection by robot and method for reference wall edge selection by cleaning robot | |
| CN111289957B (zh) | 外参标定方法及装置、智能机器人及计算机可读存储介质 | |
| CN111157965B (zh) | 车载毫米波雷达安装角度自校准方法、装置及存储介质 | |
| CN111337018B (zh) | 定位方法及装置、智能机器人及计算机可读存储介质 | |
| CN110927762B (zh) | 一种定位修正方法、装置及系统 | |
| CN110411435B (zh) | 机器人定位方法、装置以及机器人 | |
| US20120101719A1 (en) | Apparatus and method for detecting locations of vehicle and obstacle | |
| CN114488094A (zh) | 一种车载多线激光雷达与imu外参数自动标定方法及装置 | |
| CN112710339A (zh) | 用于校准车辆传感器的方法和设备 | |
| CN115840196A (zh) | 基于实体标定间的激光雷达间标定方法及装置 | |
| CN114839611A (zh) | 一种毫米波雷达的自标定方法及装置 | |
| CN112050741B (zh) | 周期栅阵的周期长度的测量方法 | |
| CN113768419A (zh) | 确定扫地机清扫方向的方法、装置及扫地机 | |
| CN115032618B (zh) | 应用于激光雷达的盲区修复方法、装置及激光雷达 | |
| CN113625234A (zh) | 一种车辆雷达的安装角度校正方法及一种车辆雷达 | |
| CN116734082A (zh) | 管道机器人及多传感器融合管道内径缺陷和淤泥检测方法 | |
| CN114442073A (zh) | 激光雷达的标定方法、装置、车辆及存储介质 | |
| CN114111681A (zh) | 一种用于机器人底盘的轴距标定方法及系统 | |
| CN113702927A (zh) | 一种车辆传感器标定方法、装置及存储介质 | |
| CN111409053B (zh) | 转向校准方法及装置、智能机器人及计算机可读存储介质 | |
| CN112540600A (zh) | 自移动设备工作区域的边界修正方法及自移动设备 | |
| CN113376617B (zh) | 雷达标定结果准确性的评价方法、装置、存储介质及系统 | |
| CN111880181B (zh) | 一种微弱痕迹处理方法、装置、检测方法及装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |