CN114886552B - 一种高频电刀组织闭合系统、发生器及高频电刀 - Google Patents
一种高频电刀组织闭合系统、发生器及高频电刀 Download PDFInfo
- Publication number
- CN114886552B CN114886552B CN202210482325.2A CN202210482325A CN114886552B CN 114886552 B CN114886552 B CN 114886552B CN 202210482325 A CN202210482325 A CN 202210482325A CN 114886552 B CN114886552 B CN 114886552B
- Authority
- CN
- China
- Prior art keywords
- tissue
- value
- phase difference
- output
- voltage
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/1442—Probes having pivoting end effectors, e.g. forceps
- A61B18/1445—Probes having pivoting end effectors, e.g. forceps at the distal end of a shaft, e.g. forceps or scissors at the end of a rigid rod
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/1206—Generators therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00696—Controlled or regulated parameters
- A61B2018/00702—Power or energy
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00696—Controlled or regulated parameters
- A61B2018/0072—Current
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00696—Controlled or regulated parameters
- A61B2018/00755—Resistance or impedance
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00696—Controlled or regulated parameters
- A61B2018/00767—Voltage
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00773—Sensed parameters
- A61B2018/00827—Current
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00773—Sensed parameters
- A61B2018/00875—Resistance or impedance
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00773—Sensed parameters
- A61B2018/00892—Voltage
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B2018/1405—Electrodes having a specific shape
- A61B2018/1412—Blade
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Biomedical Technology (AREA)
- Otolaryngology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Plasma & Fusion (AREA)
- Physics & Mathematics (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Surgical Instruments (AREA)
Abstract
本发明揭示了一种高频电刀能量控制方法、系统、发生器及高频电刀,通过双极刀具前端的两个电极向手术部位提供能量,系统还包括一种实时计算高频电刀输出系统控制参数的方法;通过初始电压电流相位差值和初始阻抗值来确认双极刀具两个电极之间是否有效夹持组织;根据预定功率变化轨迹调整输出功率,直到组织阻抗值达到目标变化特征;根据预定电压变化轨迹调整输出能量,直到组织阻抗值达到结束阻抗阈值;判断在预定时间内组织阻抗值不低于保持阻抗阈值。通过本发明方法,经双极刀具的两个电极向组织提供能量,通过计算得到更为准确的实际电压电流相位差值和实际组织阻抗值,以此为基础实现更加精确的能量控制。
Description
技术领域
本发明涉及手术器械技术领域,具体地涉及一种高频电刀组织闭合系统、发生器及高频电刀。
背景技术
高频电刀是通过电能对组织进行密封的医疗器械,通常包括被配置用于双极或单极操作的远侧安装的端部执行器。在双极操作期间,电流通过端部执行器的作用电极和返回电极穿过组织。在单极操作期间,电流通过端部执行器的作用电极和单独设置在患者身体上的返回电极穿过组织。由流过组织的电流所产生的热可在组织内和/或在组织之间形成止血密封,并因此可适用于组织闭合。
对于用于7mm以下动脉、静脉以及淋巴管等闭合的双极高频电刀,其具有特殊设计的刀具结构使其刀具前爪能够有效夹持组织,并施加较大压力到组织部位。组织闭合是一个熔合组织两侧胶原弹性蛋白和基质,从而使它们形成一个无明显界限的融合质的过程。与普通双极高频电刀相比输出能量的特征是高功率并且低电压,具有较高的输出电流。能量被优化输出从而防止组织黏连和碳化,配合刀具前爪施加在组织上的高压力,最终形成一个牢固的闭合区。因此,此类的双极高频电刀需要对其提供一种相适配的新颖的组织闭合方法及系统。
另一方面,高频电刀输出信号频率一般高于100KHz,可以避免对人体肌肉和神经产生刺激,发生器通过控制输出信号的功率和功率因数来控制手术效果,一般来说功率因数越高,电凝效果越好,输出的峰值电压也为更高。高频电刀系统中具有多组电压和电流传感器,实时采样输出的电压和电流信号,控制器对采样得到的电压电流信号进行处理,得到阻抗和相位等控制参数,根据这些控制参数对实时输出功率进行控制。
实际手术过程中由于实际复杂的手术环境,包括温度、血液、体液渗透、周围组织、刀具状态等因素的影响,导致电路以及组织存在变化的寄生电感、寄生电容,实际输出的反馈信号可能偏离理想的正弦信号,存在比较复杂的高频谐波,从而导致通过单一FFT等算法直接计算得到的实际组织阻抗值或者实际电压电流相位差值非常不准确。
发明内容
本发明的目的是克服现有技术存在的不足,提供一种有效夹持组织、有效闭合组织的高频电刀组织闭合系统、发生器及高频电刀。
本发明的目的通过以下技术方案来实现:
本发明揭示了一种高频电刀组织闭合系统,包括:
组织有效夹持判断单元,包括传感器,用于当高频电刀输出系统开始工作,采样其输出参数,根据输出参数计算初始电压电流相位差值θ0和初始组织阻抗值Z0;根据所述初始电压电流相位差值θ0和初始组织阻抗值Z0判断是否有效夹持组织;
组织充分熔化判断单元,用于根据所述初始电压电流相位差值θ0和初始组织阻抗值Z0确定功率变化轨迹,基于所述功率变化轨迹计算并调整每个时间点的输出功率;实时监测组织阻抗值变化率,判断所述组织阻抗值变化率的均值的绝对值是否小于特定阈值,若小于则表明组织已经充分熔化;
输出电压调整单元,用于调整控制电压到目标电压值,并保持恒定电压输出;实时监测实际组织阻抗值是否达到结束阻抗阈值;
组织闭合成功判断单元,用于实时监测实际组织阻抗值在预定时间内是否小于保持阻抗阈值;当在预定时间内所述实际组织阻抗值不小于所述保持阻抗阈值,则发出组织闭合成功提示信息并结束高频电刀输出系统的能量输出。
优选的,所述输出参数包括但不限于高频电刀输出系统的输出电压、输出电流。
优选的,所有阶段中均实时采样输出系统的输出参数,实时计算高频电刀输出系统的实际电压电流相位差值θ和实际组织阻抗值Z。
优选的,所述“实时计算高频电刀输出系统的实际电压电流相位差值θ”的具体步骤为,
通过均值计算算法或过零比较算法计算出参考相位差值θref,
通过Goertzel算法或者FFT算法计算输出信号基频相位差值θ1以及2倍频的二次谐波的相位差值θ2,
根据所述基频相位差值θ1以及二次谐波的相位差值θ2采用公式1加权平均值得到实际电压电流相位差值θ,加权系数根据基频相位差值θ1以及二次谐波的相位差值θ2采用公式2和公式3计算得到,
θ=wθ1θ1+wθ2θ2 【公式1】;


其中,wθ1和wθ2为权重系数。
优选的,所述“通过均值计算算法计算出参考相位差值θref”具体为:
提供实时采样的输出系统的输出参数;
根据所述输出参数计算实时电压有效值Vrms、电流有效值Irms、以及有效功率值Prms;
根据公式4计算得到参考相位差值θref;

优选的,所述“通过过零比较算法计算出参考相位差值θref”具体为:
提供实时采样的输出系统的输出参数,从中得到采样电压过零点相位差值θV、电流过零点相位差值θI;
根据公式5计算得到参考相位差值θref;
θref=θV-θI 【公式5】。
优选的,所述“实时计算高频电刀输出系统的实际组织阻抗值Z”的具体步骤为,
通过有效值算法计算出参考阻抗值Zref,
通过Goertzel算法或者FFT算法计算输出信号基频阻抗值Z1以及2倍频的二次谐波的阻抗值Z2,
根据所述基频阻抗值Z1以及二次谐波的阻抗值Z2采用公式6加权平均值得到实际组织阻抗值Z,加权系数根据基频阻抗值Z1以及二次谐波的阻抗值Z2采用公式7和公式8计算得到,
Z=wZ1Z1+wZ2Z2 【公式6】;


其中,wZ1和wZ2为权重系数。
优选的,所述“根据所述初始电压电流相位差值θ0和初始组织阻抗值Z0判断是否有效夹持组织”的具体步骤为,
配置一个查找表,
查找所述查找表,基于所述初始电压电流相位差值θ0得到一个阻抗上阈值Zupper以及阻抗下阈值Zkower,
判断所述初始组织阻抗值Z0是否处在阻抗上阈值Zupper以及阻抗下阈值Zlower之间,若处在,则判断高频电刀已经有效夹持组织。
优选的,所述“根据所述初始电压电流相位差值θ0和初始组织阻抗值Z0确定功率变化轨迹”具体步骤为,
根据所述初始电压电流相位差值θ0和初始组织阻抗值Z0确定适应所述功率变化轨迹的函数及函数中的至少一个参数;
所述函数为线性函数;
所述参数为功率变化轨迹的初始功率及线性轨迹的上升斜率。
优选的,所述“根据所述初始电压电流相位差值θ0和初始组织阻抗值Z0确定功率变化轨迹”具体步骤为,
根据所述初始电压电流相位差值θ0和初始组织阻抗值Z0确定适应所述功率变化轨迹的二次函数或其他多项式函数的一种函数,及所述函数中对应的参数。
优选的,所述“实时监测组织阻抗值的变化率”具体步骤为,
通过以下公式计算得到组织阻抗值的变化率Slopez
SlopeZ[t+1]=Z[t+1]-Z[t]
其中,Z[t+1]和Z[t]分别为相邻两个时刻的实际组织阻抗值。
优选的,所述目标电压值根据第二阶段中的监测到的最小组织阻抗值Zmin确定。
优选的,所述“调整控制电压到目标电压值”具体为,在预定时间内将电压线性调整到所述目标电压值。
优选的,所述“实时监测实际组织阻抗值是否达到结束阻抗阈值”具体步骤为,
根据初始组织阻抗值Z0和最小组织阻抗值Zmin,通过求和函数或者加权平均函数计算得到结束阻抗阈值Zend;
实时监测实际组织阻抗值,当所述实际组织阻抗值达到结束阻抗阈值Zend则进入第四阶段。
优选的,所述保持阻抗阈值Zhold计算公式如下:
Zhold=Zend-Zfall
其中Zfall为一个预定的固定阻抗下降偏置值。
优选的,所述第四阶段中,当在预定时间内所述实际组织阻抗值小于所述保持阻抗阈值时,则持续维持第三阶段的工作状态。
本发明还揭示了一种高频电刀的发生器,包括控制芯片、功率产生及输出电路、采样电路、接口电路,所述控制芯片内具有控制电路,所述控制电路被配置成具有如上述的高频电刀组织闭合系统。
本发明还揭示了一种高频电刀,包括双极刀具,以及如权上述的发生器。
本发明还揭示了一种实时计算高频电刀输出系统控制参数的方法,包括如下步骤:
实时采样输出系统的输出参数,
实时计算高频电刀输出系统的实际电压电流相位差值θ和实际组织阻抗值Z。
优选的,所述“实时计算高频电刀输出系统的实际电压电流相位差值θ,,的具体步骤为,
通过均值计算算法或过零比较算法计算出参考相位差值θref,
通过Goertzel算法或者FFT算法计算输出信号基频相位差值θ1以及2倍频的二次谐波的相位差值θ2,
根据所述基频相位差值θ1以及二次谐波的相位差值θ2采用公式1加权平均值得到实际电压电流相位差值θ,加权系数根据基频相位差值θ1以及二次谐波的相位差值θ2采用公式2和公式3计算得到,
θ=wθ1θ1+wθ2θ2 【公式1】;


其中,wθ1和wθ2为权重系数。
优选的,所述“通过均值计算算法计算出参考相位差值θref”具体为:
提供实时采样的输出系统的输出参数;
根据所述输出参数计算实时电压有效值Vrms、电流有效值Irms、以及有效功率值Prms;
根据公式4计算得到参考相位差值θref;

优选的,所述“通过过零比较算法计算出参考相位差值θref”具体为:
提供实时采样的输出系统的输出参数,从中得到采样电压过零点相位差值θV、电流过零点相位差值θI;
根据公式5计算得到参考相位差值θref;
θref=θV-θI 【公式5】。
优选的,所述“实时计算高频电刀输出系统的实际组织阻抗值Z”的具体步骤为,
通过有效值算法计算出参考阻抗值Zref,
通过Goertzel算法或者FFT算法计算输出信号基频阻抗值Z1以及2倍频的二次谐波的阻抗值Z2,
根据所述基频阻抗值Z1以及二次谐波的阻抗值Z2采用公式6加权平均值得到实际组织阻抗值Z,加权系数根据基频阻抗值Z1以及二次谐波的阻抗值Z2采用公式7和公式8计算得到,
Z=wZ1Z1+wZ2Z2 【公式6】;


其中,wZ1和wZ2为权重系数。
优选的,所述“通过有效值算法计算出参考阻抗值Zref”具体为:
提供实时采样的输出系统的输出参数;
根据所述输出参数计算实时电压有效值Vrms、电流有效值Irms;
根据公式9计算得到参考阻抗值Zref为,

优选的,该方法可用于计算初始电压电流相位差值θ0和初始组织阻抗值Z0。
本发明还揭示了一种高频电刀的发生器,包括控制芯片、功率产生及输出电路、采样电路、接口电路,所述控制芯片内具有控制电路,所述控制电路被配置成使用如上述的实时计算高频电刀输出系统控制参数的方法。
本发明还揭示了一种高频电刀,包括刀具,以及如上述的发生器。所述刀具为双极刀具或者单极刀具。
本发明的有益效果主要体现在:通过本发明闭合方法经双极刀具的两个电极向组织提供能量,通过四个阶段的控制可以实现组织的有效闭合;本发明综合考虑基频及二次谐波的阻抗和相位差等参数,通过计算得到更为准确的实际电压电流相位差值和实际组织阻抗值,以此为基础实现组织闭合过程更加精确的控制。
附图说明
下面结合附图对本发明技术方案作进一步说明:
图1:本发明优选实施例的高频电刀的系统图;
图2:本发明优选实施例的高频电刀系统结构框图;
图3:本发明优选实施例的组织闭合过程控制流程图;
图4:本发明优选实施例的一种实施方案第一阶段流程图;
图5:本发明优选实施例的一种实施方案第二阶段流程图;
图6:本发明优选实施例的一种实施方案第三阶段流程图;
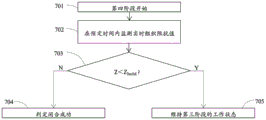
图7:本发明优选实施例的一种实施方案第四阶段流程图;
图8:本发明优选实施例的一种输出信号示意图;
图9:本发明优选实施例的闭合过程输出功率和电压变化示意图。
具体实施方式
以下将结合附图所示的具体实施方式对本发明进行详细描述。但这些实施方式并不限于本发明,本领域的普通技术人员根据这些实施方式所做出的结构、方法、或功能上的变换均包含在本发明的保护范围内。
如图1所示,本发明揭示了一种高频电刀系统示意图,101为高频电刀发生器,用于产生和控制输出到组织部位的能量,102为高级双极模式的刀具插口;103为双极刀具,包括插头、连接线以及刀头部分;104、105为刀头部分最前端用于夹持组织的上下两个电极,发生器输出的能量通过连接线、以及刀头内部连接两个电极的导体,最终将能量传递到组织部位。
图2为本发明揭示的一种高频电刀系统结构框图,其中:201为高频电刀主机,主控芯片202可以为arm、dsp、fpga、as ic、cpu、gpu等芯片,系统软件控制逻辑和算法主要运行在该主控芯片中,该主控芯片202可以接收输出及采样控制芯片203实施的采样信号,并根据采样信号计算算法需要的至少一种控制参数,该控制参数可以为输出信号基频或二次谐波对应的组织阻抗值和电压电流相位差值,并根据算法产生至少一种控制参数,控制参数可以为输出功率、输出电压、输出电流等参数。所述输出及采样控制芯片203接收主控芯片发送的控制参数,对功率产生以及输出电路、输出采样电路进行实时控制。当然,输出及采样控制芯片203的功能也可以由所述主控芯片202来实现。功率产生以及输出电路204用于根据采样控制芯片203的控制信号产生实时高频交流信号,并将该高频交流信号通过刀具接口电路206、刀具接口208和连接的刀具输出到手术组织部位。输出采样电路205和207,包括至少一种传感器,该传感器可以为电压或者电流传感器,可以对实时输出信号进行采样,可以至少得到一组输出参数,该输出参数可以为输出电压和输出电流,输出采样信号将采样得到信号发送给所述输出及采样控制芯片203,完成整个系统的闭环控制。
所述输出及采样控制芯片203对实时输出电压、电流信号进行采样,优选的,输出高频信号为为450KHz~550KHz,采样电路每个信号周期采样64或者128个点,并将采样点发送给输出及采样控制芯片203。
本发明优选的一种实施方案中输出信号如图8所示,输出信号包含比较复杂的高次谐波,使用单一算法计算组织阻抗值和电压电流相位差值不够准确。因此本发明中提出一种优化的计算方法,综合考虑基频及二次谐波的阻抗和相位差等参数,可以得到更准确实时计算高频电刀输出系统的实际电压电流相位差值θ和实际组织阻抗值Z,进而实现闭合过程更加精确的控制。
具体解释如下。
首先使用第一种算法计算出参考相位差值θref和参考阻抗值Zref,该第一种算法可以为均值计算算法、过零比较算法、有效值算法:通过均值计算算法或过零比较算法计算出参考相位值θref,通过有效值算法计算出参考阻抗值Zref。
然后通过第二种算法计算输出信号基频相位值θ1以及2倍频的二次谐波的相位值θ2,输出信号基频阻抗值Z1以及2倍频的二次谐波的阻抗值Z2。该第二种算法可以为使用Goertzel算法或者FFT算法。
实际电压电流相位差值θ根据所述基频相位值θ1以及二次谐波的相位值θ2加权平均值得到,实际组织阻抗值Z根据所述基频阻抗值Z1以及二次谐波的阻抗值Z2加权平均值得到。
具体的,首先基于采样信号,可以计算得到电压的有效值Urms,电流有效值Irms计算算法分别为:


接着可以计算得到参考阻抗值Zref为:

根据采样信号电压信号的过零时间点tu以及电压信号的过零时间点tI,可以计算得到参考相位差值θref,算法如下:

其中T为输出高频信号周期。
或者,通过均值计算算法计算出参考相位差值θref,具体为:
提供实时采样的输出系统的输出参数;
计算实时电压有效值Vrms、电流有效值Irms、以及有效功率值Prms;
计算得到参考相位差值θref;

或者,通过过零比较算法计算出参考相位差值θref”,具体为:
提供实时采样的输出系统的输出参数,从中得到采样电压过零点相位差值θV、电流过零点相位差值θI;
计算得到参考相位差值θref;
θref=θV-θI。
基于FFT算法或者Goertzel算法计算实时输出信号基频的电压峰值U1和相位差值θv1,电流的峰值I1和相位差值θI1,以及二次谐波的电压峰值U2和相位差值θv2,电流的峰值I2和相位差值θI2。
根据基频的峰值电压Up1和峰值电流Ip1可以计算出基频信号阻抗值Z1和基频电压电流相位差值θ1:
Z1=U1/I1
θ1=θv1-θI1
根据二次谐波的峰值电压Up2和峰值电流Ip2可以计算出基频信号阻抗位Z2=U2/I2电压电流相位差值θ2:
θ2=θv2-θI2
实际的组织阻抗值Z可以经过Z1和Z2的加权平均值得到:
Z=wZ1Z1+wZ2Z2
其中wZ1和wZ2为权重系数,权重系数由Z1、Z2与参考相位差值Zref的比值的一个映射函数得到,可以表示为:


实际相位差值θ可以经过θ1和θ2的加权平均值得到:
θ=wθ1θ1+wθ2θ2
其中wθ1和wθ2为权重系数,权重系数由θ1、θ2与参考相位差值θref的比值的一个映射函数得到,可以表示为:


由此,可以得到的实际组织阻抗值Z和实际电压电流相位差值θ,基于该结果对输出信号进行实时控制。
图3为本发明专利优选的组织闭合过程控制流程图,分为四个阶段。
第一阶段,当医生按下时刀具上的手动开关或者踩下相应的脚踏板时,开始组织闭合过程。步骤301中,高频电刀输出系统开始输出小信号并在步骤302中进行采样计算初始电压电流相位差值θ0和初始组织阻抗值Z0,该小信号可以为1~10W的高频交流信号,持续时间可以为10ms~300ms,初始电压电流相位差值θ0和初始组织阻抗值Z0为分别该段时间内的相位平均值和组织阻抗平均值。在本发明优选的一种实施方案中,该信号功率为4W,持续时间为200ms,频率为450KHz。
步骤303为闭合过程由算法根据初始电压电流相位差值θ0和初始组织阻抗值Z0判断刀具是否有效夹持组织。
结合图4所示,在本发明优选的一种实施方案中,组织有效夹持判断算法为:
配置一个查找表,
查找所述查找表,基于初始电压电流相位差值θ0基于一个查找表得到一个阻抗上阈值Zupper以及阻抗下阈值Zlower,即步骤404。
步骤405中,比较所述初始组织阻抗值Z0与阻抗上阈值Zupper以及阻抗下阈值Zlower之间的关系。
步骤407,当初始组织阻抗值Z0在阻抗上阈值Zupper以及阻抗下阈值Zlower之间时,表示刀具前口有效地夹持了组织,然后可以进入闭合过程第二阶段。
步骤406分为两种情况,当阻抗值Z0低于阻抗下阈值Zlower时,表示刀具两个电极之间夹持组织过少或者有液体;当阻抗值Z0高于阻抗上阈值Zupper,表示刀具两个电极之间夹持过多组织或开路。
本发明组织闭合过程的第二阶段如图3的步骤304和步骤305。该阶段目的使得组织变性熔化。
该阶段开始时,如步骤304,首先根据初始电压电流相位差值θ0和初始组织阻抗值Z0由算法确定一个功率变化轨迹,该轨迹可能为一次线性函数、二次函数或者其他多项式函数的其中一种,根据初始电压电流相位差值θ0和初始组织阻抗值Z0至少可以确定该轨迹的至少一个参数。
功率变化轨迹的函数是事先根据实际测试效果确定的,例如优选实施例中,当该轨迹为一次线性函数,对应的函数的参数可以为一个恒定功率值(包括初始功率)及线性轨迹的上升斜率,由初始电压电流相位差值θ0和初始组织阻抗值Z0计算而来,计算公式例如:上升斜率=a*Z0+b,其中a、b为固定值。本领域技术人员所熟知,计算公式可以多种,优选实施例仅为举例,其他计算公式也在本发明保护范围之内。第二阶段会根据所述功率变化轨迹计算并调整每个时间点的输出功率。
第二阶段还会实时监测组织阻抗值的平均变化率,对应于步骤305,当阻抗变化率均值的绝对值低于一个特定阈值时,表示组织已经完全熔合,阻抗不再发生变化,该过程阻抗会呈现降低趋势,但是由于实际复杂的手术环境,包括温度、血液、体液渗透、周围组织、刀具状态等因素的影响,血管闭合过程可能存在相对复杂的生物和物理变化,阻抗会呈现波动状态,直接使用实时阻抗值或者平均阻抗值进行判断误差比较大,实际研究表明平均阻抗变化率均值的绝对值是一个比较好的熔合判断特征。
结合图5所示,在本发明优选的一种实施方案中,
步骤502,根据所述初始电压电流相位差值θ0和初始组织阻抗值Z0确定功率变化轨迹;
步骤503,基于所述功率变化轨迹计算并调整每个时间点的输出功率;
步骤504,实时监测组织阻抗值变化率,计算均值;
步骤505,判断所述阻抗变化率的均值的绝对值是否小于特定阈值Shist,若小于则表明组织已经充分熔化,进入步骤506。
所述组织阻抗值变化率Slopez由以下公式计算得到,其中Z[t+1]和Z[t]分别为相邻两个时刻的阻抗:
SlopeZ[t+1]=Z[t+1]-Z[t]
所述组织阻抗值变化率的均值算法可以为一段时间内的斜率平均值,加权平均值或者指数平均值。本发明优选的一种实施算法采用连续时间序列的指数平均值,具有非常高的计算效率,只需要保存前一时刻的斜率平均值,算法如下,其中α为指数平均因子,可以用来调节平均程度,该值越大平均效果越显著:
SlopeZ[t]avg=α*SlopeZ[t-1]avg+(1-α)*Slopez[t]。
当组织熔合结束后会进入组织闭合第三阶段,对应图3的步骤306和步骤307。该阶段主要利用刀具前口的高压力使得第二阶段熔化的组织进一步完全融合在一起,并且使得融合的组织干燥凝固形成牢固的闭合区,随着组织的完全融化,刀具前口两个电极之间的间隙会越来越小,该过程需要控制合适的电压值可以使得组织能够比较稳定的干燥凝固的同时,不会因为间隙过小发生击穿,从而在提高闭合效果的同时,防止组织击穿粘连,提高刀具寿命。
结合图6所示,在本发明优选的一种实施方案中,
步骤602,计算目标电压值和结束阻抗阈值;
步骤603,调整控制电压到目标电压值;
步骤604,保持恒定电压输出;
步骤605,实时监测组织阻抗值是否达到结束阻抗阈值,当组织阻抗值大于结束阻抗阈值时;进入步骤606。
第三阶段中会首先根据第二阶段的最小阻抗值Zmin计算一个目标电压值Utarget,然后将当前电压值在预定时间内线性调整到目标电压Utarget然后保持恒定电压。
所述目标电压值Utarget的计算公式可以为一个函数,该函数可以为线性函数或者多项式函数,在本发明优选的一种实施方案中,该算法为一个线性函数,计算公式如下:
Utarget=a*Zmin+b,其中a、b为常数。
本领域技术人员所熟知,计算公式可以多种,优选实施例仅为举例,其他计算公式也在本发明保护范围之内。
第三阶段开始时还会根据初始阻抗值Z0和第二阶段中计算得到的最小阻抗值Zmin计算结束阻抗阈值Zend,计算公式可以为一个函数,该函数可以为求和函数或者加权平均函数,在本发明优选的一种实施方案中,该算法为一个加权平均函数,计算公式如,其中β和γ为加权系数:
Zend=β*Z0+γ*Zmin。
步骤307中会监测实际组织阻抗值是否达到结束阻抗阈值Zend,当实际组织阻抗值达到或大于结束阻抗阈值Zend时,进入第四阶段。
第四阶段如图3的步骤308和步骤309所示。该阶段中,步骤308,实时监测实际组织阻抗值在预定时间内是否小于保持阻抗阈值;步骤309,当在预定时间内所述实际组织阻抗值不小于所述保持阻抗阈值,则发出组织闭合成功提示信息并结束高频电刀输出系统的能量输出。
结合图7所示,在本发明优选的一种实施方案中,
步骤702,在预定时间内监测实时组织阻抗值;
步骤703,同时判断实时组织阻抗值是否会小于一个保持阻抗阈值Zhold,Zhold计算公式如下:
Zhold=Zend-Zfall
其中Zfall为一个预设的固定阻抗下降偏置。
步骤704,当预定时间内实时组织阻抗值不小于所述保持阻抗阈值Zhold,则会判定闭合成功。
步骤705,当在预定时间内实时组织阻抗值小于所述保持阻抗阈值Zhold,则维持第三阶段的工作状态。
步骤309中,本发明专利优选的一种实施方案会自动停止能量输出,并发出结束提示,提示可包括声音、闪光等。
本发明专利优选的一种实施方案中,一个组织闭合过程中输出功率、输出电压变化如图9所示,从附图中可以看到第一阶段801功率和电压基本保持不变,用来测试初始阻抗和相位;第二阶段802功率和电压值均变大,此阶段用来使组织变性熔化,组织阻抗逐渐减小;第三阶段803先按照预定轨迹将电压调整到目标电压,然后保持恒定电压输出,第四阶段804保持恒定电压,第三阶段和第四阶段随着组织干燥过程阻抗逐渐增大,输出功率逐渐减小。
本发明还揭示一种高频电刀组织闭合系统,包括:
组织有效夹持判断单元,包括传感器,用于当高频电刀输出系统开始工作,采样其输出参数,根据输出参数计算初始电压电流相位差值θ0和初始组织阻抗值Z0;根据所述初始电压电流相位差值θ0和初始组织阻抗值Z0判断是否有效夹持组织;
组织充分熔化判断单元,用于根据所述初始电压电流相位差值θ0和初始组织阻抗值Z0确定功率变化轨迹,基于所述功率变化轨迹计算并调整每个时间点的输出功率;实时监测组织阻抗值变化率,判断所述组织阻抗值变化率的均值的绝对值是否小于特定阈值,若小于则表明组织已经充分熔化;
输出电压调整单元,用于调整控制电压到目标电压值,并保持恒定电压输出;实时监测实际组织阻抗值是否达到结束阻抗阈值;
组织闭合成功判断单元,用于实时监测实际组织阻抗值在预定时间内是否小于保持阻抗阈值;当在预定时间内所述实际组织阻抗值不小于所述保持阻抗阈值,则发出组织闭合成功提示信息并结束高频电刀输出系统的能量输出。
本发明还揭示了一种高频电刀的发生器,包括控制芯片、功率产生及输出电路、采用电路、接口电路,所述控制芯片内具有控制电路,所述控制电路被配置成使用如上所述的高频电刀组织闭合方法。
本发明还揭示了一种高频电刀,包括双极刀具,以及如上所述的发生器。
应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施方式中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
上文所列出的一系列的详细说明仅仅是针对本发明的可行性实施方式的具体说明,它们并非用以限制本发明的保护范围,凡未脱离本发明技艺精神所作的等效实施方式或变更均应包含在本发明的保护范围之内。
Claims (16)
1.一种高频电刀组织闭合系统,其特征在于:包括
组织有效夹持判断单元,包括传感器,用于当高频电刀输出系统开始工作,采样其输出参数,根据输出参数计算初始电压电流相位差值θ0和初始组织阻抗值Z0;根据所述初始电压电流相位差值θ0和初始组织阻抗值Z0判断是否有效夹持组织;
组织充分熔化判断单元,用于根据所述初始电压电流相位差值θ0和初始组织阻抗值Z0确定功率变化轨迹,基于所述功率变化轨迹计算并调整每个时间点的输出功率;实时监测组织阻抗值变化率,判断所述组织阻抗值变化率的均值的绝对值是否小于特定阈值,若小于则表明组织已经充分熔化;
输出电压调整单元,用于调整控制电压到目标电压值,并保持恒定电压输出;实时监测实际组织阻抗值是否达到结束阻抗阈值;
组织闭合成功判断单元,用于实时监测实际组织阻抗值在预定时间内是否小于保持阻抗阈值;当在预定时间内所述实际组织阻抗值不小于所述保持阻抗阈值,则发出组织闭合成功提示信息并结束高频电刀输出系统的能量输出;
所有单元均实时采样输出系统的输出参数,实时计算高频电刀输出系统的实际电压电流相位差值θ和实际组织阻抗值Z;所述“实时计算高频电刀输出系统的实际电压电流相位差值θ”的具体步骤为,
通过均值计算算法或过零比较算法计算出参考相位差值θref,
通过Goertzel算法或者FFT算法计算输出信号基频相位差值θ1以及2倍频的二次谐波的相位差值θ2,
根据所述基频相位差值θ1以及二次谐波的相位差值θ2采用公式1加权平均值得到实际电压电流相位差值θ,加权系数根据基频相位差值θ1以及二次谐波的相位差值θ2采用公式2和公式3计算得到,
θ=wθ1θ1+wθ2θ2 【公式1】;


其中,wθ1和wθ2为权重系数。
2.根据权利要求1所述的高频电刀组织闭合系统,其特征在于:所述输出参数包括高频电刀输出系统的输出电压、输出电流。
3.根据权利要求1所述的高频电刀组织闭合系统,其特征在于:所述“通过均值计算算法计算出参考相位差值θref”具体为:
提供实时采样的输出系统的输出参数;
根据所述输出参数计算实时电压有效值Vrms、电流有效值Irms、以及有效功率值Prms;
根据公式4计算得到参考相位差值θref;

4.根据权利要求1所述的高频电刀组织闭合系统,其特征在于:所述“通过过零比较算法计算出参考相位差值θref”具体为:
提供实时采样的输出系统的输出参数,从中得到采样电压过零点相位差值θV、电流过零点相位差值θI;
根据公式5计算得到参考相位差值θref;
θref=θv-θI 【公式5】。
5.根据权利要求1所述的高频电刀组织闭合系统,其特征在于:所述“实时计算高频电刀输出系统的实际组织阻抗值Z”的具体步骤为,
通过有效值算法计算出参考阻抗值Zref,
通过Goertzel算法或者FFT算法计算输出信号基频阻抗值Z1以及2倍频的二次谐波的阻抗值Z2,
根据所述基频阻抗值Z1以及二次谐波的阻抗值Z2采用公式6加权平均值得到实际组织阻抗值Z,加权系数根据基频阻抗值Z1以及二次谐波的阻抗值Z2采用公式7和公式8计算得到,
Z=wZ1Z1+wZ2Z2 【公式6】;


其中,wZ1和wZ2为权重系数。
6.根据权利要求1所述的高频电刀组织闭合系统,其特征在于:所述“根据所述初始电压电流相位差值θ0和初始组织阻抗值Z0判断是否有效夹持组织”的具体步骤为,
配置一个查找表,
查找所述查找表,基于所述初始电压电流相位差值θ0得到一个阻抗上阈值Zupper以及阻抗下阈值Zlower,
判断所述初始组织阻抗值Z0是否处在阻抗上阈值Zupper以及阻抗下阈值Zlower之间,若处在,则判断高频电刀已经有效夹持组织。
7.根据权利要求1所述的高频电刀组织闭合系统,其特征在于:所述“根据所述初始电压电流相位差值θ0和初始组织阻抗值Z0确定功率变化轨迹”具体步骤为,
根据所述初始电压电流相位差值θ0和初始组织阻抗值Z0确定适应所述功率变化轨迹的函数及函数中的至少一个参数;
所述函数为线性函数;
所述参数为功率变化轨迹的初始功率及线性轨迹的上升斜率。
8.根据权利要求1所述的高频电刀组织闭合系统,其特征在于:所述“根据所述初始电压电流相位差值θ0和初始组织阻抗值Z0确定功率变化轨迹”具体步骤为,
根据所述初始电压电流相位差值θ0和初始组织阻抗值Z0确定适应所述功率变化轨迹的二次函数或其他多项式函数的一种函数,及所述函数中对应的参数。
9.根据权利要求1所述的高频电刀组织闭合系统,其特征在于:所述“实时监测组织阻抗值的变化率”具体步骤为,
通过以下公式计算得到组织阻抗值的变化率Slopez
SlopeZ[t+1]=Z[t+1]-Z[t]
其中,Z[t+1]和Z[t]分别为相邻两个时刻的实际组织阻抗值。
10.根据权利要求1所述的高频电刀组织闭合系统,其特征在于:所述目标电压值根据第二阶段中的监测到的最小组织阻抗值Zmin确定。
11.根据权利要求10所述的高频电刀组织闭合系统,其特征在于:所述“调整控制电压到目标电压值”具体为,在预定时间内将电压线性调整到所述目标电压值。
12.根据权利要求11所述的高频电刀组织闭合系统,其特征在于:所述“实时监测实际组织阻抗值是否达到结束阻抗阈值”具体步骤为,
根据初始组织阻抗值Z0和最小组织阻抗值Zmin,通过求和函数或者加权平均函数计算得到结束阻抗阈值Zend;
实时监测实际组织阻抗值,当所述实际组织阻抗值达到结束阻抗阈值Zend则所述组织闭合成功判断单元开始启动。
13.根据权利要求1所述的高频电刀组织闭合系统,其特征在于:所述保持阻抗阈值Zhold计算公式如下:
Zhold=Zend-Zfall
其中Zfall为一个预定的固定阻抗下降偏置值。
14.根据权利要求13所述的高频电刀组织闭合系统,其特征在于:当在预定时间内所述实际组织阻抗值小于所述保持阻抗阈值时,则持续维持所述输出电压调整单元的工作状态。
15.一种高频电刀的发生器,其特征在于:包括控制芯片、功率产生及输出电路、采样电路、接口电路,所述控制芯片内具有控制电路,所述控制电路被配置成具有如权利要求1至14任一所述的高频电刀组织闭合系统。
16.一种高频电刀,其特征在于:包括双极刀具,以及如权利要求15所述的发生器。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210482325.2A CN114886552B (zh) | 2022-05-05 | 2022-05-05 | 一种高频电刀组织闭合系统、发生器及高频电刀 |
| CN202210556942.2A CN115024814B (zh) | 2022-05-05 | 2022-05-05 | 实时计算高频电刀输出系统控制参数的方法、发生器及电刀 |
| PCT/CN2022/124259 WO2023213046A1 (zh) | 2022-05-05 | 2022-10-10 | 一种高频电刀组织闭合方法、系统、发生器及高频电刀 |
| PCT/CN2022/124543 WO2023213048A1 (zh) | 2022-05-05 | 2022-10-11 | 实时计算高频电刀输出系统控制参数的方法、发生器及电刀 |
| EP22940742.4A EP4494588A4 (en) | 2022-05-05 | 2022-10-11 | METHOD FOR CALCULATING REAL-TIME CONTROL PARAMETERS OF A HIGH-FREQUENCY ELECTROTOME OUTPUT SYSTEM, GENERATOR AND SOLENOID VALVE |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210482325.2A CN114886552B (zh) | 2022-05-05 | 2022-05-05 | 一种高频电刀组织闭合系统、发生器及高频电刀 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202210556942.2A Division CN115024814B (zh) | 2022-05-05 | 2022-05-05 | 实时计算高频电刀输出系统控制参数的方法、发生器及电刀 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN114886552A CN114886552A (zh) | 2022-08-12 |
| CN114886552B true CN114886552B (zh) | 2023-07-04 |
Family
ID=82719047
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202210482325.2A Active CN114886552B (zh) | 2022-05-05 | 2022-05-05 | 一种高频电刀组织闭合系统、发生器及高频电刀 |
| CN202210556942.2A Active CN115024814B (zh) | 2022-05-05 | 2022-05-05 | 实时计算高频电刀输出系统控制参数的方法、发生器及电刀 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202210556942.2A Active CN115024814B (zh) | 2022-05-05 | 2022-05-05 | 实时计算高频电刀输出系统控制参数的方法、发生器及电刀 |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP4494588A4 (zh) |
| CN (2) | CN114886552B (zh) |
| WO (2) | WO2023213046A1 (zh) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114831725B (zh) * | 2022-05-05 | 2024-01-26 | 以诺康医疗科技(苏州)有限公司 | 一种电外科发生器、电外科系统及其控制方法 |
| CN114886552B (zh) * | 2022-05-05 | 2023-07-04 | 以诺康医疗科技(苏州)有限公司 | 一种高频电刀组织闭合系统、发生器及高频电刀 |
| CN115861184A (zh) * | 2022-11-14 | 2023-03-28 | 上海微创医疗机器人(集团)股份有限公司 | 机器人能量输出展示方法及系统 |
| CN115737105A (zh) * | 2022-11-21 | 2023-03-07 | 武汉迈瑞医疗技术研究院有限公司 | 一种高频外科能量控制系统、方法及计算机可读存储介质 |
| CN117379172B (zh) * | 2023-12-12 | 2024-02-13 | 山东百多安医疗器械股份有限公司 | 一种智能手术电刀装置 |
| CN119745498B (zh) * | 2024-12-27 | 2025-12-19 | 苏州领微医疗科技有限公司 | 电外科发生器功率控制方法、装置、设备及存储介质 |
| CN119679479B (zh) * | 2025-01-10 | 2025-12-05 | 常州安康医疗器械有限公司 | 组织器官离断提示的控制方法、装置及计算机可读介质 |
| CN120078485B (zh) * | 2025-04-30 | 2025-08-15 | 厚凯(北京)医疗科技有限公司 | 能量输出设备、方法、存储介质及操作系统 |
| CN121512676A (zh) * | 2026-01-12 | 2026-02-13 | 善彤医疗科技(湖南)有限公司 | 双极电刀的控制方法、装置、电外科设备及存储介质 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103222891A (zh) * | 2012-01-27 | 2013-07-31 | 科维蒂恩有限合伙公司 | 用于相位预测的阻抗损耗模型校准和补偿的系统和方法 |
| RU2691845C1 (ru) * | 2019-02-20 | 2019-06-18 | Общество С Ограниченной Ответственностью "Анико" (Ооо "Анико") | Способ абляции биологических тканей и устройство для его осуществления |
Family Cites Families (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH067586B2 (ja) * | 1987-05-19 | 1994-01-26 | 富士通株式会社 | 論理回路装置 |
| US20100042093A9 (en) * | 1998-10-23 | 2010-02-18 | Wham Robert H | System and method for terminating treatment in impedance feedback algorithm |
| US6733498B2 (en) * | 2002-02-19 | 2004-05-11 | Live Tissue Connect, Inc. | System and method for control of tissue welding |
| CN1278654C (zh) * | 2004-12-23 | 2006-10-11 | 上海交通大学 | 水冷式射频肿瘤消融治疗系统的智能化控制方法 |
| JP2007143878A (ja) * | 2005-11-28 | 2007-06-14 | Olympus Medical Systems Corp | 高周波電源装置及び電気手術装置 |
| US20160045248A1 (en) * | 2006-01-24 | 2016-02-18 | Covidien Lp | System and method for tissue sealing |
| US9186200B2 (en) * | 2006-01-24 | 2015-11-17 | Covidien Ag | System and method for tissue sealing |
| US20080082098A1 (en) * | 2006-09-29 | 2008-04-03 | Kazue Tanaka | Electric processing system |
| US8845537B2 (en) * | 2009-06-03 | 2014-09-30 | Olympus Medical Systems Corp. | Ultrasound operation apparatus, ultrasound operation system, and cavitation utilization method |
| US8419727B2 (en) * | 2010-03-26 | 2013-04-16 | Aesculap Ag | Impedance mediated power delivery for electrosurgery |
| US8968293B2 (en) * | 2011-04-12 | 2015-03-03 | Covidien Lp | Systems and methods for calibrating power measurements in an electrosurgical generator |
| US9498275B2 (en) * | 2013-03-14 | 2016-11-22 | Covidien Lp | Systems and methods for arc detection and drag adjustment |
| US9498276B2 (en) * | 2013-03-15 | 2016-11-22 | Covidien Lp | Systems and methods for narrowband real impedance control in electrosurgery |
| US9504516B2 (en) * | 2013-05-31 | 2016-11-29 | Covidien LLP | Gain compensation for a full bridge inverter |
| EP4649907A3 (en) * | 2014-05-16 | 2026-02-25 | Applied Medical Resources Corporation | Electrosurgical system |
| WO2016031382A1 (ja) * | 2014-08-26 | 2016-03-03 | オリンパス株式会社 | 電気外科処置システム |
| US10898256B2 (en) * | 2015-06-30 | 2021-01-26 | Ethicon Llc | Surgical system with user adaptable techniques based on tissue impedance |
| CN105832406B (zh) * | 2016-01-25 | 2023-10-13 | 安进医疗科技(北京)有限公司 | 功率控制方法及装置、控制设备及方法、电磁刀手术系统 |
| CN105877836A (zh) * | 2016-05-27 | 2016-08-24 | 厚凯(北京)医疗科技有限公司 | 一种外科手术能量平台系统 |
| US11259830B2 (en) * | 2018-03-08 | 2022-03-01 | Cilag Gmbh International | Methods for controlling temperature in ultrasonic device |
| CN109259849B (zh) * | 2018-08-28 | 2021-01-05 | 重庆金山科技(集团)有限公司 | 电外科能量发生器的控制系统 |
| CN112168335A (zh) * | 2019-01-30 | 2021-01-05 | 苏州信迈医疗器械有限公司 | 一种具有防止重复消融功能的射频消融仪 |
| CN113712630B (zh) * | 2021-08-30 | 2023-10-17 | 以诺康医疗科技(苏州)有限公司 | 一种基于剪切结束判断模型的控制方法和系统 |
| CN114886552B (zh) * | 2022-05-05 | 2023-07-04 | 以诺康医疗科技(苏州)有限公司 | 一种高频电刀组织闭合系统、发生器及高频电刀 |
-
2022
- 2022-05-05 CN CN202210482325.2A patent/CN114886552B/zh active Active
- 2022-05-05 CN CN202210556942.2A patent/CN115024814B/zh active Active
- 2022-10-10 WO PCT/CN2022/124259 patent/WO2023213046A1/zh not_active Ceased
- 2022-10-11 EP EP22940742.4A patent/EP4494588A4/en active Pending
- 2022-10-11 WO PCT/CN2022/124543 patent/WO2023213048A1/zh not_active Ceased
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103222891A (zh) * | 2012-01-27 | 2013-07-31 | 科维蒂恩有限合伙公司 | 用于相位预测的阻抗损耗模型校准和补偿的系统和方法 |
| RU2691845C1 (ru) * | 2019-02-20 | 2019-06-18 | Общество С Ограниченной Ответственностью "Анико" (Ооо "Анико") | Способ абляции биологических тканей и устройство для его осуществления |
Also Published As
| Publication number | Publication date |
|---|---|
| CN115024814B (zh) | 2023-07-11 |
| EP4494588A1 (en) | 2025-01-22 |
| EP4494588A4 (en) | 2026-01-28 |
| WO2023213046A1 (zh) | 2023-11-09 |
| WO2023213048A1 (zh) | 2023-11-09 |
| CN115024814A (zh) | 2022-09-09 |
| CN114886552A (zh) | 2022-08-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN114886552B (zh) | 一种高频电刀组织闭合系统、发生器及高频电刀 | |
| US9375254B2 (en) | Seal and separate algorithm | |
| US11154345B2 (en) | System and method for tissue sealing | |
| US8226639B2 (en) | System and method for output control of electrosurgical generator | |
| AU2011200472B2 (en) | Square wave for vessel sealing | |
| AU2007200268B2 (en) | System and method for terminating treatment in impedance feedback algorithm | |
| CA2232018C (en) | Electrosurgical generator with adaptive power control | |
| AU2007202464B2 (en) | System and method for controlling tissue heating rate prior to cellular vaporization | |
| CA2574864C (en) | Method and system for controlling delivery of energy to divide tissue | |
| US20100063500A1 (en) | Apparatus, System and Method for Performing an Electrosurgical Procedure | |
| CN102846366B (zh) | 用于生物组织的优化凝固的方法和设备 | |
| JP2012217856A (ja) | プロセスの監視およびインテリジェント停止のためのシステムおよび方法 | |
| CN112869867A (zh) | 一种高频电刀控制系统、方法、装置、fpga | |
| CN114831725A (zh) | 一种电外科发生器、电外科系统及其控制方法 | |
| JP2005000224A (ja) | 電気手術装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CP03 | Change of name, title or address |
Address after: 215000 Jiangsu Province, Suzhou City, Industrial Park, Xinghu Street 218, Room B2-409 Patentee after: Enkang Medical Technology (Suzhou) Co., Ltd. Country or region after: China Address before: 215000 Jiangsu Province, Suzhou City, Industrial Park, Xinghu Street 218, Room B2-409 Patentee before: INNOLCON MEDICAL TECHNOLOGY (SUZHOU) Co.,Ltd. Country or region before: China |
|
| CP03 | Change of name, title or address |