CN113633217A - Sweeping assembly for sweeping robot and sweeping robot - Google Patents
Sweeping assembly for sweeping robot and sweeping robot Download PDFInfo
- Publication number
- CN113633217A CN113633217A CN202111149512.0A CN202111149512A CN113633217A CN 113633217 A CN113633217 A CN 113633217A CN 202111149512 A CN202111149512 A CN 202111149512A CN 113633217 A CN113633217 A CN 113633217A
- Authority
- CN
- China
- Prior art keywords
- brush
- rotation
- rotary
- fan
- sweeping
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000010408 sweeping Methods 0.000 title claims abstract description 106
- 230000007246 mechanism Effects 0.000 claims abstract description 146
- 238000004140 cleaning Methods 0.000 claims abstract description 73
- 238000005096 rolling process Methods 0.000 claims description 130
- 238000005520 cutting process Methods 0.000 claims description 41
- 239000000758 substrate Substances 0.000 claims description 38
- 210000004209 hair Anatomy 0.000 claims description 21
- 230000001960 triggered effect Effects 0.000 claims description 8
- 238000004804 winding Methods 0.000 claims description 8
- 230000004044 response Effects 0.000 claims description 7
- 230000008034 disappearance Effects 0.000 claims description 4
- 230000005465 channeling Effects 0.000 claims 1
- 230000006872 improvement Effects 0.000 abstract description 9
- 230000006378 damage Effects 0.000 abstract description 6
- 238000005299 abrasion Methods 0.000 abstract description 5
- 230000009467 reduction Effects 0.000 abstract description 4
- 239000002184 metal Substances 0.000 description 7
- 208000027418 Wounds and injury Diseases 0.000 description 6
- 238000009434 installation Methods 0.000 description 5
- 238000010586 diagram Methods 0.000 description 4
- 239000000428 dust Substances 0.000 description 4
- 238000003825 pressing Methods 0.000 description 4
- 238000003860 storage Methods 0.000 description 4
- 230000000694 effects Effects 0.000 description 3
- 238000012423 maintenance Methods 0.000 description 3
- 238000000034 method Methods 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 230000001680 brushing effect Effects 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 239000002245 particle Substances 0.000 description 2
- 238000000926 separation method Methods 0.000 description 2
- 238000011144 upstream manufacturing Methods 0.000 description 2
- 238000013459 approach Methods 0.000 description 1
- 230000004323 axial length Effects 0.000 description 1
- 238000010009 beating Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 239000006185 dispersion Substances 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000011086 high cleaning Methods 0.000 description 1
- 208000014674 injury Diseases 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000004806 packaging method and process Methods 0.000 description 1
- 230000002035 prolonged effect Effects 0.000 description 1
- 230000001737 promoting effect Effects 0.000 description 1
- 210000003781 tooth socket Anatomy 0.000 description 1
Images




















Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/02—Nozzles
- A47L9/04—Nozzles with driven brushes or agitators
-
- A—HUMAN NECESSITIES
- A46—BRUSHWARE
- A46B—BRUSHES
- A46B17/00—Accessories for brushes
- A46B17/06—Devices for cleaning brushes after use
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/02—Nozzles
- A47L9/04—Nozzles with driven brushes or agitators
- A47L9/0461—Dust-loosening tools, e.g. agitators, brushes
- A47L9/0466—Rotating tools
- A47L9/0477—Rolls
-
- A—HUMAN NECESSITIES
- A46—BRUSHWARE
- A46B—BRUSHES
- A46B2200/00—Brushes characterized by their functions, uses or applications
- A46B2200/30—Brushes for cleaning or polishing
- A46B2200/3033—Household brush, i.e. brushes for cleaning in the house or dishes
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Nozzles For Electric Vacuum Cleaners (AREA)
Abstract
The invention discloses a sweeping assembly for a sweeping robot and the sweeping robot. Based on the invention, the cleaning assembly can be configured with a de-entangling mechanism, wherein the rotating roller brush can generate smaller abrasion in a first physical contact with the de-entangling mechanism during the task execution of the cleaning task, and the rotating roller brush can cause the entanglement of the rotating roller brush to break through a second physical contact with the de-entangling mechanism during the non-task execution by turning over, so that the automatic cleaning of the entanglement of the rotating roller brush can be realized on the premise that the damage of the de-entangling member of the rotating roller brush is minimized, thereby contributing to the improvement of cleaning efficiency, the reduction of cleaning difficulty and the improvement of user experience.
Description
Technical Field
The invention relates to the robot technology, in particular to a sweeping assembly for a sweeping robot and the sweeping robot applying the sweeping assembly.
Background
Sweeping robots are typically equipped with a rotating brush roll and suction assembly. In the period of executing the cleaning task, the rotating rolling brush rotates, so that the dirt in the road area of the sweeping robot can be lifted by the rolling brush to leave the ground, and the dirt lifted by the rolling brush can be sucked by the suction assembly to the dirt storage space to be accumulated, so that the ground can be cleaned.
In a scene where human or animal liveness is high (e.g., a home environment where people and pets live), the proportion of hair in dirt may be relatively high, hair that is lifted up by the rotary drum brush roll is easily entangled in the rotary drum brush, and is difficult to be sucked into the storage space by the suction assembly. In the past, the entanglement of the rotating roller brush was accumulated continuously, and thus the winding capacity of the rotating roller brush was lowered, and even the normal rotation of the rotating roller brush was likely to be affected.
In order to clean the hair wound on the rotary rolling brush, the prior art only depends on a manual mode, so that the cleaning efficiency is low, the cleaning difficulty is high, and the user experience is influenced.
Disclosure of Invention
In the embodiment of the invention, a sweeping assembly for a sweeping robot and the sweeping robot applying the sweeping assembly are provided, which can automatically clean bristles wound on a rotary rolling brush.
In one embodiment, a sweeping assembly for a sweeping robot may include:
the rotary rolling brush comprises a rolling brush rotating shaft and rolling brush fan distributed on the periphery of the rolling brush rotating shaft;
the driving mechanism is used for driving the rotary rolling brush to rotate around the rolling brush rotating shaft along a first rotating direction for executing a cleaning task or rotate around the rolling brush rotating shaft along a second rotating direction opposite to the first rotating direction;
a de-entangling mechanism configured to:
during the period that the rotary rolling brush rotates around the rolling brush rotating shaft along the first rotating direction, first physical contact is generated between the rolling brush fan and the de-winding mechanism at the installation position;
during the period that the rotary rolling brush rotates around the rolling brush rotating shaft along the second rotating direction, a second physical contact is generated between the rolling brush fan and the de-winding mechanism at the installation position;
the abrasion degree of the first physical contact to the rolling brush fan is smaller than that of the second physical contact to the rolling brush fan;
and the second physical contact causes the bristles attached to the brush fan to break.
Optionally, the de-entangling mechanism comprises a broken hair member having a hooking tooth, wherein: during the period that the rotary rolling brush rotates around the rolling brush rotating shaft along the first rotating direction, the rolling brush fan sweeps the de-entangling mechanism with the trend of avoiding the hook teeth to form the first physical contact with the de-entangling mechanism; the second physical contact between the rolling-brush fan and the de-entanglement mechanism during the rotation of the rotary rolling brush around the rolling-brush rotating shaft in the second rotating direction comprises: interference contact is formed between the rolling brush fan and the hook teeth to promote the stretch-breaking of the entangled hair.
Optionally, the teeth comprise a first tooth and a second tooth, wherein the first and second teeth are configured to: the first physical contact occurs at the tooth backs of the first and second hooking teeth during rotation of the rotary brush about the brush rotation axis in the first rotation direction; and in the period that the rotary rolling brush rotates around the rolling brush rotating shaft along the second rotating direction, the teeth of the first hook teeth and the second hook teeth are opposite to the sector of the rolling brush in the axial direction of the rolling brush rotating shaft, so that the winding bristles are broken due to the pulling generated by the opposite hooking.
Optionally, a preset phase interval is arranged between the first hook teeth and the second hook teeth in the circumferential direction around the rotating shaft of the rolling brush; in the axial direction of the rolling brush rotating shaft, the first hook teeth and the second hook teeth are arranged in a staggered mode.
Optionally, at least two first hook teeth are arranged at intervals along the axial direction; at least two second hook teeth are arranged at intervals along the axial direction.
Optionally, the de-entangling mechanism further includes a carrier substrate, and the first and second hooking teeth are integrally formed on the carrier substrate.
Optionally, the bearing substrate includes a sheet metal substrate, and the first hook teeth and the second hook teeth are formed on the sheet metal structure of the sheet metal substrate.
Optionally, the de-entangling mechanism includes a cutting member having a blade, wherein:
during the period that the rotary rolling brush rotates around the rolling brush rotating shaft along the first rotating direction, the rolling brush fan sweeps the de-entangling mechanism with the trend of avoiding the blade part to form the first physical contact with the de-entangling mechanism;
the second physical contact between the rolling-brush fan and the de-entanglement mechanism during the rotation of the rotary rolling brush around the rolling-brush rotating shaft in the second rotating direction comprises: and interference contact for promoting the cut-off of the hair winding quilt is formed between the rolling brush fan and the blade part.
Optionally, the de-entangling mechanism further comprises a dredging member, wherein: the leading component leads the rolling brush fan to avoid the blade part in the period that the rotary rolling brush rotates around the rolling brush rotating shaft along the first rotating direction; the leading member causes the entangled bristles attached to the brush fan to strike the blade portion during a period in which the rotary brush rotates about the brush rotation shaft in the second rotation direction.
Optionally, the persuasion member is arranged obliquely with respect to the rolling brush rotary shaft to cause the entangled bristles attached to the rolling brush fan to be combed so as to tend to spread in a circumferential direction of the rolling brush rotary shaft during the guiding of the rolling brush fan.
Optionally, the blade is arranged on one side of the cutting member facing the rolling brush rotating shaft, and the dredging member comprises convex teeth arranged at intervals along the blade; wherein tooth tops of the convex teeth protrude outside the blade portion toward the rolling brush rotating shaft to guide the rolling brush fan to avoid the blade portion in a radial direction of the rolling brush rotating shaft during a period in which the rotating rolling brush rotates around the rolling brush rotating shaft in the first rotating direction; and a tooth space exposing the blade portion is provided between the teeth, and the teeth are beaten by the brush fan while the rotary brush is rotated about the brush rotation shaft in the second rotation direction so that the entangled bristles attached to the brush fan are caught by the teeth and the entangled bristles caught by the teeth are guided by the tooth space to strike the blade portion.
Optionally, the sweeping assembly further comprises a rolling brush housing, and a housing inner cavity of the rolling brush housing is provided with a rolling brush window; wherein one part of the rotary rolling brush is positioned in the inner cavity of the housing, and the other part of the rotary rolling brush protrudes out of the inner cavity of the housing from the rolling brush window; and, the de-entangling mechanism further comprises a mounting base plate, the cutting member is fixed on the mounting base plate to be inserted into the housing inner cavity by assembling the mounting base plate with the rolling brush housing.
Optionally, the mounting of the mounting substrate to the roller brush housing is adjustable, wherein: when the mounting substrate is constrained against the roller brush casing against the external urging force of the elastic prestress, the cutting member is in a state of being in place with the blade portion protruding into the casing cavity; when the mounting substrate is driven to be away from the rolling brush housing by the elastic prestress due to the disappearance of the external pushing force, the cutting member is in a hidden state that the blade part is retracted to the outside of the housing inner cavity.
Optionally, the de-entangling mechanism further comprises a poking member, wherein: when the pushing and pulling member is restrained at a specified phase by the external pushing and pulling force, the pushing and pulling member pushes the mounting substrate to be attached to the rolling brush housing; when the external pushing force disappears, the mounting substrate is driven by the elastic prestress to leave the rolling brush housing, and the pushing and pulling component is pushed to deviate from the specified phase.
Optionally, the external pushing force is generated in response to a first event that allows the sweeping robot to perform a sweeping task; the external biasing force is dissipated in response to a second event that allows the housing interior to be cleaned.
Optionally, the sweeping assembly further comprises an inner cavity shield removably mounted to the roll brush window, wherein: the first event comprises the inner cavity shield fitting into place with the scroll window; the second event includes the lumen shield being detached from the scrubber window.
In another embodiment, a sweeping robot may include a mobile chassis, a suction assembly, and a sweeping assembly according to the previous embodiments.
Optionally, further comprising a processor configured to: when a cleaning task is received, triggering the moving chassis to move along a track designated by the cleaning task, and triggering the driving mechanism to drive the rotary rolling brush to rotate in the first rotating direction and trigger the suction assembly to operate during the execution period of the cleaning task; when a trigger event after the completion of the sweeping task is detected, the driving mechanism is triggered to drive the rotary rolling brush to rotate in the second rotating direction for a first preset time period, and the suction assembly is in a stop state during the rotation of the rotary rolling brush in the second rotating direction.
Optionally, the processor is further configured to: after the rotating rolling brush rotates along the second rotating direction for the first preset time, the driving mechanism is triggered to drive the rotating rolling brush to rotate along the first rotating direction for the second preset time, and the suction assembly is triggered to operate for the second preset time.
Based on the above embodiments, the cleaning assembly for the sweeping robot may be configured with a de-entangling mechanism, wherein the rotating roller brush may be in physical contact with a first physical contact of the de-entangling mechanism during task execution of a cleaning task to generate less wear, and the rotating roller brush may be in contact with a second physical contact of the de-entangling mechanism during non-task execution by flipping over to cause a break of entangled bristles wound around the rotating roller brush, so that automatic entangled bristles cleaning of the rotating roller brush may be realized on the premise that damage of the rotating roller brush by the de-entangling member is minimized, thereby contributing to improvement of cleaning efficiency, reduction of cleaning difficulty, and improvement of user experience.
Drawings
The following drawings are only schematic illustrations and explanations of the present invention, and do not limit the scope of the present invention:
FIG. l is a schematic diagram illustrating an exploded view of the sweeping assembly in one embodiment;
FIG. 2 is a schematic structural view of a first de-entangling mechanism of the sweeping assembly shown in FIG. 1;
FIG. 3 is a sectional view schematically showing the cleaning assembly shown in FIG. 1 in an assembled state;
FIG. 4 is a schematic view of the sweeping principle of the sweeping assembly shown in FIG. 1;
FIG. 5 is a schematic view of the de-entangling principle of the sweeping assembly shown in FIG. 1;
FIG. 6 is a schematic view illustrating a blade hiding principle of the cleaning assembly shown in FIG. 1;
FIG. 7 is a schematic view of a first de-entangling mechanism of the sweeping assembly of FIG. 1 in a hidden state;
FIG. 8 is an exploded view of the first de-entangling mechanism of the sweeping assembly shown in FIG. 1;
FIG. 9 is a schematic view of an expanded configuration of the sweeping assembly shown in FIG. 1 in an exploded state;
FIG. 10 is a schematic view of the expanded configuration of FIG. 9 in a first assembled state;
FIG. 11 is a schematic view of a second assembled state of the expanded configuration shown in FIG. 9;
FIGS. 12a and 12b are schematic views showing an assembled structure of a sweeping assembly in another embodiment;
FIG. 13 is a sectional view schematically showing the cleaning assembly shown in FIGS. 12a and 12b in an assembled state;
FIG. 14 is a schematic view of the sweeping principle of the sweeping assembly shown in FIGS. 12a and 12 b;
FIG. 15 is a schematic view of the de-entangling principle of the sweeping assembly shown in FIGS. 12a and 12 b;
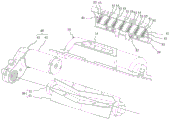
FIG. 16 is a schematic structural view of a second de-entangling mechanism of the sweeping assembly shown in FIGS. 12a and 12 b;
FIG. 17 is a schematic view of the second de-entangling mechanism of the sweeping assembly shown in FIGS. 12a and 12 b;
FIG. 18 is a cross-sectional view of the mounting structure of the second de-entangling mechanism of the sweeping assembly shown in FIGS. 12a and 12 b;
fig. 19 is a schematic structural diagram of an example of the sweeping robot in another embodiment;
fig. 20 is a schematic flow chart of an example of the operation of the sweeping robot in another embodiment.
Description of the reference numerals
10. 10' rolling brush casing
11. 11' housing inner cavity
13. 13' roll brushing window
15. 15' suction tuyere
17 mounting window
20 first inner cavity shield
200 side direction boss
30. 30' rotary rolling brush
31. 31' rolling brush rotating shaft
33. 33' rolling brush fan
40 driving mechanism
41 Power element
43 drive mechanism
50 first woollen mechanism of twining that removes
5l mounting substrate
511 substrate body
513 mounting lugs
515 lobe rotating shaft
53 dredging component
531 convex teeth
533 tooth socket
55 cutting member
550 blade part
57 pushing and pulling component
571 swing pressure plate
573 installation convex frame
575 push cantilever
59 packaging cover box
591 cover box main body
593 installation gap
595 mounting bracket
597 avoiding gap
60 second de-entangling mechanism
61 bearing substrate
65 broken hair component
650 hook teeth
651 first hook tooth
653 second hook tooth
70 second inner chamber shield
700 socket
Detailed Description
In order to make the objects, technical solutions and advantages of the present invention more apparent, the present invention is further described in detail below with reference to the accompanying drawings and examples.
FIG. l is a schematic diagram illustrating an exploded view of the sweeping assembly in one embodiment. Fig. 2 is a schematic structural view of a first de-entangling mechanism of the sweeping assembly shown in fig. 1. Fig. 3 is a sectional view schematically showing the assembled state of the cleaning assembly shown in fig. 1. Referring to fig. 1 to 3, the sweeping assembly for the sweeping robot in this embodiment may include a rotary rolling brush 30, a driving mechanism 40, and a first de-entangling mechanism 50.
The rotary drum brush 30 may include a drum brush rotating shaft 31, and drum brush fans 33 distributed on the outer circumference of the drum brush rotating shaft 31, wherein the drum brush fans 33 may be arranged at intervals around the axial direction of the drum brush rotating shaft 31, and the drum brush fans 33 may be arranged obliquely with respect to the axial direction of the drum brush rotating shaft 31. The brush fan 33 can be cyclically turned around the axis of the brush rotating shaft 31 during the rotation of the brush rotating shaft 31.
The driving mechanism 40 may include a power element 41 such as a motor, and a transmission mechanism 43 drivingly connected between the power element 41 and the rotary brush 30 (the brush roller shaft 31), so that the rotary brush roller 30 can rotate in response to a power output generated by the power element 41. That is, the driving mechanism 40 is used to drive the rotary drum brush 30 to rotate, and specifically, the driving mechanism 40 may be used to drive the rotary drum brush 30 to rotate in a first rotation direction R1 in which a cleaning task is performed, or to rotate in a second rotation direction R2 opposite to the first rotation direction R1.
The first direction of rotation R1 may be the working direction of the sweeping robot during the sweeping task, and the rotary drum brush 30 rotating in the first direction of rotation R1 is used to lift the rolling brush of the floor dirt.
For example, the sweeping assembly may further include a roller housing 10, the housing interior 11 of the roller housing 10 having a roller window 13 and a suction air opening 15 arranged with a predetermined phase offset with respect to the roller window 13, wherein a portion of the rotary roller 30 is located within the housing interior 11, another portion protrudes from the roller window 13 outside the housing interior 11, and the drive mechanism 40 is in driving connection with the rotary roller 30 outside the roller housing 10.
Thus, during the period in which the rotary drum brush 30 is rotated about the drum brush rotating shaft 31 in the first rotating direction R1 in which the cleaning task is performed by the driving mechanism 40, the drum brush fan 33 which is cyclically turned about the axis of the drum brush rotating shaft 31 can lift the floor dirt rolling brush outside the rolling brush window 13 into the housing inner cavity 11, wherein the particulate debris 91 in the floor dirt lifted by the rolling brush can be drawn out from the suction air opening 15 to the dirt storage space such as the dust box by the suction component (not shown in the drawings) of the cleaning robot, and if the floor dirt lifted by the rolling brush contains elongated bristles, these elongated bristles theoretically may be sucked like the particulate debris 91, but at least a part of the elongated bristles 92 is wound around the rotary drum brush 30 due to unsuccessful suction and forms a winding bristle 92 attached to the drum brush fan 33.
The second rotation direction R2, which is opposite to the first rotation direction R1, can also support the rolling brush fan 33 of the rotating rolling brush 30 to roll up the dirt on the floor, but its main function is to cooperate with the first de-entangling mechanism 50 to realize the cleaning of the entangled bristles 92 of the rotating rolling brush 30, and the rotation of the rotating rolling brush 30 around the rolling brush rotating shaft 31 in the second rotation direction R2 is triggered at other times than during the cleaning task (e.g., during the charging period when the sweeping robot is parked at the charging stand).
In this embodiment, the first de-entangling mechanism 50 may be configured to:
during the period in which the rotary brush 30 is rotated about the brush rotating shaft 31 in the first rotating direction R1, a first physical contact is made between the brush fan 33 and the first de-entangling mechanism 50 in the mounted position;
during the period in which the rotary brush 30 is rotated about the brush rotating shaft 31 in the second rotating direction R2, a second physical contact is made between the brush fan 33 and the first de-entangling mechanism 50 in the mounted position;
wherein the degree of wear of the rolling brush fan 33 by the first physical contact is smaller than the degree of wear of the rolling brush fan 33 by the second physical contact, and the second physical contact causes the bristles attached to the rolling brush fan 33 to break.
Specifically, in this embodiment, the first de-entangling mechanism 50 may include a cutting member 55 (e.g., a blade) having a blade portion 550, and the number of the cutting members 55 included in the first de-entangling mechanism 50 may be one or more than one (seven are exemplified in this embodiment). Also, in this embodiment, the first dehairing mechanism 50 may be installed at the drum brush housing 10, and when the first dehairing mechanism 50 is installed at the drum brush housing 10, more than one cutting member 55 may be spaced apart from each other in parallel along the rotation axis of the rotating drum brush 30.
For example, the roll brush casing 10 may have the mounting window 17 arranged with a predetermined phase deviation displaced with respect to the roll brush window 13 and the suction tuyere 15 (the mounting window 17 is located on the downstream side of the suction seal 15 in the first rotation direction R1); also, the first de-entangling mechanism 50 may further include a mounting base plate 51, and one or more cutting members 55 may be fixed to the mounting base plate 51 to protrude into the housing inner cavity 11 by the assembly of the mounting base plate 51 with the roll brush housing 10. That is, when the mounting base plate 51 abuts against the outer wall of the roll brush casing 10 at the position covering the mounting window 17, the cutting member 55 having the blade portion 550 may be protruded from the mounting window into the casing inner cavity 11 to be kept in a stationary state during the rotation of the roll brush 30 in both the first rotation direction R1 and the second rotation direction R2.
Fig. 4 is a schematic view of the sweeping principle of the sweeping assembly shown in fig. 1. Fig. 5 is a schematic view of the de-entangling principle of the sweeping assembly shown in fig. 1. Referring to fig. 1 to 3 in conjunction with fig. 4 and 5, in this embodiment, the first de-entangling mechanism 50 may be configured to:
during a period in which the rotary roller brush 30 rotates in the first rotation direction R1 around the roller brush rotation shaft 31 (e.g., during execution of a cleaning job), as shown in fig. 4, the roller brush fan 33 can sweep (flick) the first de-entangling mechanism 50 with a tendency P _ bypass of avoiding the blade portion 550 to form a first physical contact with a lower degree of wear with the first de-entangling mechanism 50;
during the period (e.g., standby maintenance period) in which the rotary roller brush 30 rotates about the roller-brush rotation shaft 31 in the second rotation direction R2, as shown in fig. 5, an interference contact I _ cut that causes the entangled bristles 92 to be cut off (causes the entangled bristles 92 to be cut off by hitting the blade portion 550) may be formed between the roller-brush fan 33 and the blade portion 550, that is, a second physical contact generated between the roller-brush fan 33 and the first de-entangling mechanism 50 may include: an interference contact is formed between the brush fan 33 and the blade 550 to cause the entangled bristles to be cut.
Since the blade 550 is in a stationary state with respect to the housing cavity 11 during this time, the cutting of the entangled bristles 92 by the interference contact I _ cut of the roller brush fan 33 with the blade 550 can be considered as a cleaning process based on the passive cutting of the entangled bristles 92 (movement of the rotating roller brush 30, stationary blade 550).
Based on the above-described embodiment, the cleaning assembly may be configured with the first de-entangling mechanism 50 including the cutting member 55, wherein the entangled bristles 92 entangled in the rotary roller brush 30 may be cut and pulverized by the interference contact of the rotary roller brush 30 with the blade portion 550 of the cutting member 55 (the entangled bristles 920 formed after the entangled bristles 92 are cut by the blade portion 550 are shown in fig. 5, and these entangled bristles 920 may be lifted up and sucked by the rolling brush like the particle debris 91 shown in fig. 4 after falling off to the ground), thereby achieving the automatic entangled bristle cleaning of the rotary roller brush 30, which in turn contributes to the improvement of the cleaning efficiency, the reduction of the cleaning difficulty, and the improvement of the user experience. Also, the interference contact I _ cut of the rotating drum brush 30 with the blade portion 550 of the cutting member 55 may be prevented from occurring during the performance of the cleaning task, so that the cutting damage of the rotating drum brush 30 (the drum brush fan 33) by the cutting member 55 may be minimized to help to achieve the automatic cleaning of the entangled bristles 92 while taking into account the lifespan of the rotating drum brush 30.
The first de-entangling mechanism 50 may be configured in various ways to guide the brush fan 33 to escape from the blade portion 550 during the rotation of the rotary brush 30 about the brush rotation shaft 31 in the first rotation direction R1 and to urge the entangled bristles 92 to strike the blade portion 550 during the rotation of the rotary brush 30 about the brush rotation shaft 31 in the second rotation direction R2.
As a conceivable manner, the blade portion 550 of the cutting member 55 may be disposed toward the downstream side of the first rotation direction R1, the upstream side of the second rotation direction R2, so that the blade portion 550 can be hit by the rolling brush fan 33 of the rotating rolling brush 30 only during the period in which the rotating rolling brush 30 rotates about the rolling brush rotation shaft 31 in the second rotation direction R2. Further, the blunt edge of the cutting member 55 may then be arranged toward the upstream side in the first rotating direction R1 and the downstream side in the second rotating direction R2 to receive the head-on collision of the rolling brush fan 33 in place of the blade portion 550 and guide the rolling brush fan 33 to the avoidance blade portion 550 during the rotation of the rotary rolling brush 30 about the rolling brush rotating shaft 31 in the first rotating direction R1. Further, the blunt edge may be arranged obliquely with respect to the roller brush rotary shaft 31 to cause the entangled bristles 92 attached to the roller brush sector 33 to be combed so as to tend to spread in the circumferential direction of the roller brush rotary shaft 31 during the guiding of the roller brush sector 33, that is, to cause the entangled bristles 92 to be in a posture approaching to the lateral with respect to the blade portion 550 so as to be cut more easily when hitting the blade portion 550.
This embodiment provides another advantageous way, i.e. the first de-entangling mechanism 50 may further comprise a canalizing member 53, wherein:
while the rotary brush 30 is rotating about the brush rotating shaft 31 in the first rotating direction R1, the brush fan 33 can be guided by the dispersion member 53 to the avoidance edge 550;
the persuasion member 53 may cause the entangled bristles 92 attached to the brush fan 33 to strike the blade portion 550 during the rotation of the rotary brush 30 about the brush rotation shaft 31 in the second rotation direction R2.
Also, the persuasion member 53 may be arranged obliquely with respect to the roller brush rotary shaft 31 to cause the entangled bristles 92 attached to the roller brush sector 33 to be carded so as to tend to spread in the circumferential direction of the roller brush rotary shaft 31, that is, to cause the entangled bristles 92 to be in a posture that tends to be lateral with respect to the blade portion 550 during the guiding of the roller brush sector 33, so as to be cut more easily when hitting the blade portion 550.
In order to allow for a compact design of the sweeping robot, the volume of the sweeping assembly in this embodiment is preferably designed to be as small as possible, in particular the dimension in the radial direction of the rotating roller brush 30. Based on such consideration, the radial dimension of the housing inner cavity 11 of the rolling brush housing 10 is close to the outer diameter dimension of the rotating rolling brush 30, thereby the cutting member 55 is arranged along the cavity wall of the housing inner cavity 11, and the blade part 550 can be arranged at the side of the cutting member 55 facing the rolling brush rotating shaft 31, so as to allow the size of the blade part 550 to be as large as possible under the premise of considering the miniaturization design of the sweeping robot, thereby improving the efficiency of cleaning the entangled hair 92. Accordingly, the leading member 53 can guide the brush fan 33 away from the blade portion 550 and the bristles 92 against the blade portion 550 in the radial direction of the brush rotating shaft 31.
Therefore, the automatic cleaning of the entangled bristles can be realized, the size of the sweeping robot is further reduced, and the service life of the rotary rolling brush 30 is also prolonged.
In this case, with particular attention to fig. 2, the canalizing member 53 may include teeth 531 spaced along the blade 550, wherein:
in order to guide the brush fan 33 to escape from the blade portion 550 in the radial direction of the brush rotation shaft 31 during the rotation of the rotary brush 30 about the brush rotation shaft 31 in the first rotation direction R1, the tooth tips of the teeth 531 may protrude beyond the blade portion 550 toward the brush rotation shaft 31 to guide the brush fan 33 to escape from the blade portion 550 in the radial direction of the brush rotation shaft 31 (escape by flexible deformation in the radial direction);
during the period in which the rotary drum brush 30 rotates about the drum brush rotating shaft 31 in the second rotating direction R2, in order to cause the bristles 92 to strike the blade portion 550 in the radial direction of the drum brush rotating shaft 31, there may be a tooth space (533) between the teeth 531 to expose the blade portion 550, so that the bristles 92 attached to the drum brush fan 33 may be caught at the teeth 531 when the teeth 531 are struck by the drum brush fan 33, and the bristles caught at the teeth 531 can be guided by the tooth space 533 to strike the blade portion 550. Preferably, the tooth grooves 533 may be arranged obliquely with respect to the radial direction of the roller-brush rotation shaft 31 to prevent the entangled bristles 92 caught to the teeth 531 from escaping (escaping) from the tooth grooves 533 before striking the blade portion 550 during the rotation of the rotary roller brush 30 about the roller-brush rotation shaft 31 in the second rotation direction R2.
Also, the radial distance of the convex teeth 531 from the roll brush rotating shaft 31 is gradually varied in the arrangement direction, and the gradual variation tendency may be configured as:
while the rotary brush 30 is rotating about the brush rotation shaft 31 in the first rotation direction R1, the entangled bristles 92 attached to the brush fan 33 are urged by the tooth tips of the convex teeth 531 to be converged toward the brush rotation shaft 31, that is, the entangled bristles 92 are retracted into the end edge of the brush fan 33, thereby reducing the influence of the entangled bristles 92 on the brushing ability of the brush fan 33;
while the rotary brush 30 is rotating about the brush rotating shaft 31 in the second rotating direction R2, the curled bristles 92 are spread outward from the brush rotating shaft 31 and hit the blade portion 550.
In addition, if the cutting member 55 is a replaceable independent member (e.g., a metal blade), the persuasion member 53 may also be used to fixedly mount the cutting member 55 on the mounting substrate 51, for example, the persuasion member 53 may have teeth 531 spaced along the blade portion 550, and a slit for holding the cutting member 55 may be provided between the two rows of teeth 531, so that the cutting member 55 may be fixedly held by the persuasion member 53 integrally formed on the mounting substrate 51. Alternatively, the cutting member 55 may be integrally formed with the canalizing member 53 on the mounting substrate 51, that is, the cutting member 55 may have the same hard material as the mounting substrate 51 and the canalizing member 53.
In actual use, the rotary rolling brush 30 may need to be cleaned or replaced, and the housing cavity 11 where the rotary rolling brush 30 is located also needs to be cleaned and maintained, and at this time, the blade portion 550 of the cutting member 55 protruding into the housing cavity 11 becomes a safety hazard that is easy to cause cutting injury.
Fig. 6 is a schematic view illustrating a blade hiding principle of the cleaning assembly shown in fig. 1. Fig. 7 is a schematic view of the first de-entangling mechanism of the sweeping assembly shown in fig. 1 in a hidden state. In order to eliminate the above safety hazard, in this embodiment, the assembly of the mounting base plate 51 of the first de-entangling mechanism 50 to the roll brush housing 10 is adjustable so that:
when the mounting substrate 51 is constrained against the rolling brush casing 10 by the external pushing force F _ push against the elastic prestress F _ spr, as shown in fig. 6, the cutting member 55 is in a position in which the blade portion 550 is inserted into the casing inner cavity 11, i.e. the first de-entangling mechanism 50 is in the aforementioned mounting position in which the first physical contact or the second physical contact is made with the rolling brush sector 33;
when the mounting substrate 51 is driven to be separated from the roller housing 10 by the elastic pre-stress F _ spr due to the disappearance of the external pushing force F _ push (as indicated by the dotted arrow in fig. 6), the cutting member 55 is in a hidden state in which the blade portion 550 is retracted out of the housing inner cavity 11, that is, the first de-entangling mechanism 50 is now away from the mounting position as described above, which is shown in fig. 7.
In order to achieve the above-mentioned switching between the in-place state and the hidden state, in this embodiment, the first de-entangling mechanism 50 may further include a push-pull member 57, wherein:
when the push-pull member 57 is restrained at a prescribed phase (phase in fig. 6) by the external pushing force F _ push, the push-pull member 57 pushes the mounting substrate 51 against the roll brush casing 10;
when the external pushing force F _ push disappears, the mounting substrate 51 is driven by the elastic prestress F _ spr to move away from the roll brush casing 10 (to be entirely separated or partially separated from the roll brush casing 10), and pushes the push-pull member 57 to deviate from the specified phase thereof in fig. 6.
FIG. 8 is an exploded view of the first de-entangling mechanism of the sweeping assembly shown in FIG. 1. Referring to fig. 6 in further conjunction with fig. 8, in an example structure, the first de-entangling mechanism 50 may further include a cover box 59, wherein the cover box 59 may have a cover box body 591 for receiving the mounting substrate 51, and the cover box 59 may further have a mounting notch 593 at a first side of the cover box body 591.
Accordingly, the mounting substrate 51 may include a substrate main body 511 in which the cutting member 55 and the canalizing member 53 are disposed, a mounting lug 513 protruding outward from one side of the substrate main body 511, and a lug rotating shaft 515 rotatably mounting the mounting lug 513 at the mounting cutout 593. The foregoing elastic prestress F _ spr can be generated to the mounting substrate 51 by disposing an elastic member such as a torsion spring at the lug rotating shaft 515.
Also, the encapsulating cover cartridge 59 may have a mounting bracket 595 disposed inside the cover cartridge body 591, and an avoidance gap 597 disposed on a second side (opposite the first side) of the cover cartridge body 591.
Accordingly, the push member 57 may have a swing pressing plate 571 for pushing the mounting substrate 51 against the roll brush housing 10, a mounting boss 573 on one side of the swing pressing plate 571, and a push cantilever 575. Wherein, the mounting boss 573 is rotatably mounted on the mounting bracket 595 to allow the pushing member 57 to be swingably mounted on the cover case 59; the push cantilever 575 has a length larger than that of the mounting boss 573, and protrudes from the escape slit 597 of the encapsulating cover case 591 to the outside of the cover case main body 591, and receives an external pushing force F _ push.
In actual use, the external pushing force F _ push may be generated in response to a first event that allows the sweeping robot to perform a sweeping task, and the external pushing force F _ push may disappear in response to a second event that allows the housing cavity 11 to be cleaned and maintained. The second event may be a reverse event of the first event, or may be an independent event unrelated to the first event.
For the first event and the second event, the following will be exemplified.
Fig. 9 is a schematic view showing an exploded state of an expanded structure of the sweeping assembly shown in fig. 1. Fig. 10 is a schematic view of a first assembled state of the expanded configuration shown in fig. 9. Fig. 11 is a schematic view of a second assembled state of the expanded configuration shown in fig. 9. Referring to fig. 9 in conjunction with fig. 10 and 11, in this embodiment, the sweeping assembly may further include a first cavity shield 20 detachably mounted to the roll brush window 13, the first cavity shield 20 allowing a portion of the rotary roll brush 30 to protrude from the roll brush window 13 and for preventing hard objects from being splashed into the housing cavity 11, wherein:
as shown in fig. 10, the first event that the external pushing force F _ push is generated may include the first inner cavity shield 20 and the rolling brush window 13 being assembled in place, that is, when the first inner cavity shield 20 and the rolling brush window 13 are assembled in place, the lateral boss 200 of the first inner cavity shield 20 may press the pushing cantilever 575 of the pushing member 57, so as to trigger the swinging pressing plate 571 of the pushing member 57 to push the mounting substrate 51 against the rolling brush casing 10;
as shown in fig. 11, the second event causing the disappearance of the external pushing force F _ push may include the detachment and separation of the first inner cavity shield 20 from the roll brush window 13, that is, when the first inner cavity shield 20 is detached and separated from the roll brush window 13, the pressing of the lateral bosses 200 against the pushing cantilever 575 of the push-dial member 57 is released, so that the mounting substrate 51 is separated from the roll brush casing 10 by the driving of the elastic prestress F _ spr, and the push-dial member 57 is pushed to deviate from the specified phase.
Fig. 12a and 12b are schematic views illustrating an assembled structure of a sweeping assembly in another embodiment. Fig. 13 is a sectional structure view showing an assembled state of the cleaning assembly shown in fig. 12a and 12 b. Referring to fig. 12a and 12b and fig. 13, the sweeping assembly for the sweeping robot in this embodiment may still include the rotating roller brush 30', the driving mechanism 40 and the first de-entangling mechanism 50.
Wherein the rotary brush 30' differs only in physical form from the rotary brush 30 of the preceding exemplary embodiment, but is identical in function and working principle to the rotary brush 30 of the preceding exemplary embodiment and is interchangeable with the rotary brush 30 of the preceding exemplary embodiment; also, the drive mechanism 40 in this embodiment may be the same or substantially the same as in the previous embodiments.
Therefore, the rotary brush 30' and the drive mechanism 40 will not be described in detail here.
In this embodiment, the second de-entangling mechanism 60 may also be configured like the first de-entangling mechanism 50 of the previous embodiment:
during the rotation of the rotating brush 30 ' in the first direction of rotation R1 around the brush rotation shaft 31 ', a first physical contact is made between the brush sector 33 ' and the second de-entangling mechanism 60 in the mounted position;
during the rotation of the rotary brush 30 ' in the second direction of rotation R2 about the brush rotation axis 31 ', a second physical contact is produced between the brush sector 33 ' and the second de-entangling mechanism 60 in the mounted position;
wherein the degree of abrasion of the rolling brush fan 33 ' by the first physical contact is smaller than the degree of abrasion of the rolling brush fan 33 ' by the second physical contact, and the second physical contact causes the bristles attached to the rolling brush fan 33 ' to be broken.
However, unlike the first de-entangling mechanism 50 which cuts the entangled bristles using the blade portion 550, the second de-entangling mechanism 60 in this embodiment may accomplish de-entangling by snapping the entangled bristles.
Fig. 14 is a schematic view of the sweeping principle of the sweeping assembly shown in fig. 12a and 12 b. Fig. 15 is a schematic view of the de-entangling principle of the sweeping assembly shown in fig. 12a and 12 b. Fig. 16 is a schematic structural view of a second de-entangling mechanism of the sweeping assembly shown in fig. 12a and 12 b. With further reference to fig. 14 and 15 and fig. 16, the second de-entangling mechanism 60 may comprise a hair-breaking member 65 having hooking teeth 650, i.e. the second de-entangling mechanism 60 may have hooking teeth 650, wherein:
during the period in which the rotary brush 30 'is rotated about the brush rotating shaft 31' in the first rotating direction R1, as shown in fig. 14, the brush fan 33 'sweeps over the second de-entangling mechanism 60 with a tendency P _ bypass' to escape from the hooking tooth 650 to make a first physical contact with the second de-entangling mechanism 60;
during the period that the rotating drum brush 30 ' rotates around the drum brush rotating shaft 31 ' in the second rotating direction R2, as shown in fig. 15, the second physical contact generated between the drum brush fan 33 ' and the second de-entangling mechanism 60 may include: the interference contact I _ cut 'formed between the brush fan 33' and the hooking teeth 650, which causes the tangled bristles 92 to be torn off.
Since the tooth 650 is in a stationary state with respect to the housing interior 11 'during this time, the cutting of the entangled hair 92 by the interference contact I _ cut' of the brush sector 33 'with the tooth 650 can be considered as a cleaning process based on the passive cutting of the entangled hair 92 (movement of the rotating brush 30', the tooth 650 being stationary).
Based on the above-described embodiment, the sweeping assembly may be configured with the second de-entangling mechanism 60 including the hair-breaking member 65, wherein the entangled bristles 92 entangled to the rotary brush 30 'may be cut and pulverized by the interference contact of the rotary brush 30' with the hooking teeth 650 of the hair-breaking member 65 (entangled bristles 920 formed after the entangled bristles 92 are pulled apart by the hooking teeth 650 are shown in fig. 15, and these entangled bristles 920 may be lifted up by the brush and sucked through the suction air opening 15 'like the particle debris 91 shown in fig. 14 after falling off to the ground), thereby achieving the automatic entangled bristle cleaning of the rotary brush 30', which contributes to the improvement of the cleaning efficiency, the reduction of the cleaning difficulty, and the improvement of the user experience. Also, the interference contact I _ cut ' of the rotary drum brush 30 ' with the hooking teeth 650 of the hair severing member 65 may be prevented from occurring during the performance of the cleaning task, so that the hooking damage of the rotary drum brush 30 ' (the drum brush fan 33 ') by the hair severing member 65 may be minimized to contribute to the realization of the automatic cleaning of the entangled hairs 92 while taking into account the life span of the rotary drum brush 30 '.
Directing attention in particular to fig. 16, in this embodiment, the hook teeth 650 of the second de-entangling mechanism 60 may include a first hook tooth 651 and a second hook tooth 653, wherein the first and second hook teeth 651, 653 are configured to:
the first physical contact between the brush sector 33 ' and the second de-entangling mechanism 60, which occurs during the rotation of the rotary brush 30 ' about the brush rotation shaft 31 ' in the first rotation direction R1, occurs at the tooth backs 651b, 653b of the first and second hook teeth 651, 653, preferably, both the tooth backs 651b, 653b of the first and second hook teeth 651, 653 may have a smooth profile;
during the period in which the rotary brush 30 'is turned about the brush rotary shaft 31' in the second rotation direction R2, the teeth 651c and 651d of the first hook tooth 651 and the teeth 653c and 653d of the second hook tooth 653 form reverse hooks for the brush fan 33 'in the axial direction of the brush rotary shaft 31' to cause the entangled bristles 92 to break due to the pull caused by the reverse hooks.
That is, the teeth 651c and 651d of the first hook tooth 651, and the second hook tooth 653 are arranged with both the teeth 653c and 653d in the direction of head-on collision with the rotary brush roll 30 ' rotating in the second rotation direction R2, and therefore, during the turning of the rotary brush roll 30 ' in the second rotation direction R2 about the brush roll shaft 31 ':
thus, the entanglement 92, which is snagged by the first hook tooth 651 with the teeth 651c and 651d, and by the second hook tooth 653 with the teeth 653c and 653d, can be broken due to a reverse axial tensile force generated by the reverse snagging. Accordingly, the first and second hook teeth 651 and 653 may be arranged in a staggered manner in the axial direction of the brush roll shaft 31' so that the entangled bristles 92 may be subjected to a pulling force by reverse hooking at different positions so as to be broken.
Preferably, the first hook tooth 651 may have a first supporting cantilever 651a, wherein an edge of the first supporting cantilever 651a in a direction of head-on collision with the rotary drum brush 30 'rotating in the first rotating direction R1 is formed with a tooth back 651b of the first hook tooth 651, and an edge of the first supporting cantilever 651a in a direction of head-on collision with the rotary drum brush 30' rotating in the second rotating direction R2 is formed with teeth 651c and 651 d; likewise, the second hook gear 653 may have a second support cantilever 653a, wherein an edge of the second support cantilever 653a in a direction of head-on collision with the rotary drum brush 30 'rotating in the first rotation direction R1 is formed with a tooth back 653b of the second hook gear 653, and an edge of the second support cantilever 653a in a direction of head-on collision with the rotary drum brush 30' rotating in the second rotation direction R2 is formed with teeth 653c and 653 d.
And, the first support cantilever 651a is obliquely arranged towards the first axial direction, and the second support cantilever 653 is obliquely arranged towards the second axial direction, so that the first hook tooth 651 faces the first axial direction by means of the pulling force generated by the hooking of the teeth 651c and 651d, and the second hook tooth 653 faces the second axial direction by means of the pulling force generated by the hooking of the teeth 653c and 653 d.
In addition, in order to make the hooking of the first hook tooth 651 with the teeth 651c and 651d and the hooking of the second hook tooth 653 with the teeth 653c and 653d stronger, the teeth 651c and 651d of the first hook tooth 651 and the teeth 653c and 653d of the second hook tooth 653 with the teeth 653c and 653d may each adopt a multi-tooth disposition in which the deflection is staggered in the tooth thickness direction. That is, at least two teeth 651c and 651d of the first hook tooth 651 are arranged at intervals in the extending direction of the first support cantilever 651a and are alternately deflected in the tooth thickness direction of the first hook tooth 651 (i.e., the thickness direction of the first support cantilever 65 la), and at least two teeth 653c and 653d of the second hook tooth 653 are arranged at intervals in the extending direction of the second support cantilever 653a and are alternately deflected in the tooth thickness direction of the second hook tooth 653 (i.e., the thickness direction of the second support cantilever 653 a).
Due to the staggered deflection of the at least two teeth 651c and 651d of the first tooth 651, if the entangled bristle 92 is simultaneously hooked by the at least two teeth 651c and 651d, the hooking directions of the entangled bristle 92 by the at least two teeth 651c and 651d are staggered, so that the entangled bristle 92 is not easily shed, and even when the rotational speed of the rotary brush 30' is fast enough, the at least two 651c and 651d staggered deflection may also have a cutting effect on the entangled bristle 92 that approaches the blade portion 550 in the previous embodiment. The second hook 653 works the same and will not be described further.
Preferably, the second de-entangling mechanism 60 (i.e., the hair-breaking member 65) may further include a carrier base 61, and both the first and second hook teeth 651 and 653 may be integrally formed with the carrier base 61. For example, the carrier substrate 61 may include a sheet metal substrate, and the first and second hook teeth 651 and 653 are sheet metal structures formed (e.g., formed by a stamping process) on the sheet metal substrate.
In this case, at least two first hook teeth 651 and at least two second hook teeth 653 may be formed at a time for the second de-entangling mechanism 60, and the at least two first hook teeth 651 are arranged at intervals in the axial direction and the at least two second hook teeth 653 are arranged at intervals in the axial direction, so that the broken hair range of the second de-entangling mechanism 60 (i.e., the broken hair member 65) may be made to cover the entire axial length of the rotary brush 30'. If so, the first and second hooking teeth 651 and 653 may have a predetermined phase interval therebetween in a circumferential direction around the brush rotating shaft 31', so that the first and second hooking teeth 651 and 653 are distributed more discretely, which helps to ensure the strength of the carrier substrate 61.
Fig. 17 is a schematic view showing the installation principle of the second de-entangling mechanism of the cleaning assembly as shown in fig. 12a and 12 b. Fig. 18 is a sectional view schematically showing the mounting structure of the second de-entangling mechanism of the cleaning assembly as shown in fig. 12a and 12 b. Referring further to fig. 17 and 18, the sweeping assembly in this embodiment may further include a second inner chamber shield 70 detachably mounted to the roll brush window 13 ', the second inner chamber shield 70 allowing a portion of the rotary roll brush 30' to protrude from the roll brush window 13 'and serving to prevent hard objects from being splashed into the housing inner chamber 11', and the second de-entangling mechanism 60 (i.e., the hair-breaking member 65) may be detachably fixedly mounted to the second inner chamber shield 70.
For example, the second inner cavity shield 70 may have a slot 700, and the carrier substrate 61 of the second de-entangling mechanism 60 (i.e., the hair-breaking member 65) may be plugged into the slot 700.
When the second cavity shield 70 is mounted to the drum brush housing 10 ', the second de-entangling mechanism 60 (i.e., the bristle breaking member 65) mounted to the second cavity shield 70 can be located in the housing cavity 11 ' in a posture in which the hooking teeth 650 face the rotary drum brush 30 ', i.e., the second de-entangling mechanism 60 is at the mounting position at this time.
When the second inner cavity shield 70 is disassembled due to the requirements of cleaning and maintenance of the housing inner cavity 11 ', etc., the second de-entangling mechanism 60 (i.e., the hair breaking member 65) installed on the second inner cavity shield 70 is also moved out of the housing inner cavity 11 ', so as to avoid the hidden danger that the hook teeth 650 of the second de-entangling mechanism 60 (i.e., the hair breaking member 65) scratch hands in the housing inner cavity 11 '.
As can be seen from the above embodiments, the following conditions can be satisfied whether the first de-entangling members 50, which effect de-entangling based on cutting as in the embodiment shown in fig. 1, or the second de-entangling members 60, which effect de-entangling based on snapping as in the embodiments shown in fig. 12a and 12 b:
during the rotation of the rotating drum brush 30 or 30 ' in the first rotation direction R1 about the drum brush rotation shaft 31 or 31 ', a first physical contact is made between the drum brush fan 33 or 33 ' and the de-entangling mechanism (e.g., the first de-entangling mechanism 50 or the second de-entangling mechanism 60) in the installed position;
during the rotation of the rotating drum brush 30 or 30 ' in the second rotation direction R2 about the drum brush rotation shaft 31 or 31 ', a second physical contact is made between the drum brush fan 33 or 33 ' and the de-entangling mechanism (e.g., the first de-entangling mechanism 50 or the second de-entangling mechanism 60) in the mounted position;
wherein, the abrasion degree of the first physical contact to the rolling brush fan 33 or 33 is less than that of the second physical contact to the rolling brush fan 33 or 33;
and, the second physical contact causes the bristles attached to the brush fan 33 or 33 to be broken.
Based on this, the sweeping assembly for the sweeping robot may be configured with a de-entangling mechanism (the first de-entangling mechanism 50 or the second de-entangling mechanism 60), in which a first physical contact of the rotary roller 30 or 30 ' with the de-entangling mechanism (e.g., the first de-entangling mechanism 50 or the second de-entangling mechanism 60) during task performance of the sweeping task may result in less wear, and a second physical contact of the rotary roller 30 or 30 ' with the de-entangling member (the first de-entangling mechanism 50 or the second de-entangling mechanism 60) through inversion during non-task performance may cause breakage of the entangled bristles wound around the rotary roller 30 or 30 ', so that automatic cleaning of the entangled bristles around the rotary roller 30 or 30 ' may be achieved on the premise that damage of the rotary roller 30 or 30 ' by the de-entangling member (e.g., the first de-entangling mechanism 50 or the second de-entangling mechanism 60) is minimized, thereby contributing to high cleaning efficiency, The cleaning difficulty is reduced, and the user experience is improved.
In another embodiment, a sweeping robot using the sweeping assembly of the above embodiments is provided, that is, the sweeping robot may include a moving chassis, a suction assembly, and the sweeping assembly of the above embodiments.
Fig. 19 is a schematic structural diagram of an example of the sweeping robot in another embodiment. Referring to fig. 19, taking the cleaning assembly including the second de-entangling mechanism 60 as shown in fig. 12a and 12b as an example, the moving chassis 91 may include a robot body having driving wheels, the suction assembly 93 may include a blower, and the sweeping robot may further include a dust collecting assembly 95 having a dust collecting box (e.g., disposed between the suction air opening 15' and the suction assembly 93), and a wiping assembly 97 (e.g., a wiper holder and a wiper attached thereto) installed under the moving chassis 91.
In addition, in order to support the sweeping robot to perform both the cleaning task and the automatic cleaning of the entangled hair, the sweeping robot may further include a processor configured to:
when receiving a cleaning task, the trigger moving chassis moves along a track designated by the cleaning task, and the trigger driving mechanism 40 drives the rotary rolling brush 30 or 30' to rotate in the first rotating direction R1 and triggers the suction assembly to operate during the execution period of the cleaning task;
when a specified trigger event is detected after completion of the cleaning task (e.g., the sweeping robot has returned to a parking location such as a charging dock), the trigger drive mechanism 40 drives the rotary drum brush 30 or 30 'in the second rotational direction R2 for a first preset length of rotation, and the suction assembly may be in a stopped state during rotation of the rotary drum brush 30 or 30' in the second rotational direction R2.
The first preset time period is less than or even much less than the duration of the cleaning task, for example, the first preset time period may not exceed 30 seconds or even 10 seconds.
During the period in which the rotary drum brush 30 or 30 ' rotates in the second rotating direction R2, the entangled bristles wound around the rotary drum brush 30 or 30 ' may be broken by the beating of the de-entangled bristle mechanism by the drum brush fan 33 or 33 ' (for example, cut and pulverized by the blade portion 550 of the first de-entangled bristle mechanism 50, or pulled and pulverized by the hooking teeth 650 of the second de-entangled mechanism 60), and the entangled bristles formed after the broken entangled bristles may fall off to the ground, and thus, the processor may be further configured to:
after the rotating drum brush 30 or 30 'completes the rotation along the second rotating direction R2 for the first preset duration, the triggering driving mechanism 40 drives the rotating drum brush 30 or 30' to rotate along the first rotating direction R1 for the second preset duration and triggers the suction assembly to operate for the second preset duration, so as to lift up the stubbles falling off the ground by the winding brush and suck the stubbles into a dirt storage space (such as a dust box carried by the sweeping robot), thereby preventing the ground from being polluted by the stubbles.
Wherein the second preset duration is less than, even much less than, the duration of the sweeping task, for example, the second duration may be less than or equal to the first preset duration.
Fig. 20 is a schematic flow chart of an example of the operation of the sweeping robot in another embodiment. Referring to fig. 20, in this operation example, the processor of the sweeping robot may perform the following node complement cycle:
s2010: according to a cleaning task issued by a control center, a movable chassis is triggered to move along a track designated by the cleaning task, and a trigger driving mechanism drives a rotary rolling brush to rotate along a first rotating direction and triggers a suction assembly to operate in the execution period of the cleaning task;
s2030: when the cleaning task is monitored to be completed, stopping the driving mechanism and the suction assembly, and triggering the movable chassis to return to the charging seat;
s2050: when the movable chassis is detected to reach the charging seat and the hair entanglement removing mechanism of the cleaning assembly is detected to be in the mounting position, the driving mechanism is triggered to drive the rotary rolling brush to rotate along the second rotating direction for a first preset time period, and the suction assembly can be in a stop state in the period that the rotary rolling brush rotates along the second rotating direction. For example, the cleaning assembly may further include an in-place detection mechanism for detecting whether the first inner-cavity shield or the second inner-cavity passport is now assembled in place with the roll-brush window.
S2070: when the first preset time duration is timed to reach, the driving mechanism is triggered to drive the rotary rolling brush to rotate along the first rotating direction for a second preset time duration and trigger the suction assembly to operate for the second preset time duration.
After that, through will clean the inner chamber guard shield of subassembly this moment and dismantle the separation with the rolling brush window, can implement the clearance maintenance to the housing inner chamber.
The above description is only for the purpose of illustrating the preferred embodiments of the present invention and is not to be construed as limiting the invention, and any modifications, equivalents, improvements and the like made within the spirit and principle of the present invention should be included in the scope of the present invention.
Claims (15)
1. A clean subassembly for sweeping floor robot, its characterized in that includes:
a rotary drum brush (30 or 30 '), the rotary drum brush (30 or 30 ') including a drum brush rotating shaft (31 or 31 '), and drum brush fans (33 or 33 ') distributed on the outer circumference of the drum brush rotating shaft (31 or 31 ');
a drive mechanism (40), said drive mechanism (40) being adapted to drive said rotary brush roll (30 or 30 ') in a first direction of rotation about said brush roll axis (31 or 31 ') for performing a sweeping task, or in a second direction of rotation about said brush roll axis (31 or 31 ') opposite to said first direction of rotation;
a de-entangling mechanism (50 or 60), the de-entangling mechanism (50 or 60) configured to:
during the rotation of the rotating drum brush (30 or 30 ') in the first direction of rotation about the drum brush rotation axis (31 or 31 '), a first physical contact is made between the drum brush fan (33 or 33 ') and the de-entangling mechanism (50 or 60) in the mounted position;
during the rotation of the rotating drum brush (30 or 30 ') in the second direction of rotation about the drum brush rotation axis (31 or 31 '), a second physical contact is produced between the drum brush fan (33 or 33 ') and the de-entangling mechanism (50 or 60) in the mounted position;
wherein the degree of wear of the rolling brush fan (33 or 33 ') by the first physical contact is less than the degree of wear of the rolling brush fan (33 or 33') by the second physical contact;
and the second physical contact causes the bristles attached to the brush fan (33 or 33') to be broken.
2. The cleaning assembly as set forth in claim 1, characterized in that said de-entangling mechanism (60) has hooking teeth (650), wherein:
during the rotation of the rotating brush roll (30 or 30 ') about the brush roll axis (31 or 31 ') in the first direction of rotation, the brush roll fan (33 or 33 ') sweeps over the de-entangling mechanism with a tendency to avoid the teeth (650) to form the first physical contact with the de-entangling mechanism (60);
the second physical contact between the brush sector (33 or 33 ') and the de-entanglement mechanism (60) during the rotation of the rotary brush roll (30 or 30 ') in the second rotational direction about the brush roll axis (31 or 31 ') comprises: interference contact between the brush fan (33 or 33') and the hooking tooth (650) to cause the entangled bristles to be snapped off.
3. The cleaning assembly as set forth in claim 2, characterized in that said hook tooth (650) comprises a first hook tooth (651) and a second hook tooth (653), wherein said first hook tooth (651) and said second hook tooth (653) are configured to:
said first physical contact occurs at the backs of said first and second hook teeth (651, 653) during rotation of said rotary brush roll (30 or 30 ') about said brush roll axis (31 or 31') in said first direction of rotation;
during the period that the rotary drum brush (30 or 30 ') is turned around the drum brush rotating shaft (31 or 31') in the second rotating direction, the teeth of the first hook tooth (651) and the second hook tooth (653) form a reverse hook to the drum brush fan (33 or 33 ') in the axial direction of the drum brush rotating shaft (31 or 31') to promote the entanglement of the bristles to be broken due to the pulling caused by the reverse hook.
4. The sweeping assembly according to claim 3, wherein the first and second hooking teeth (651, 653) are arranged offset in the axial direction of the brush rotor shaft (31 or 31').
5. The cleaning assembly as set forth in claim 1, characterized in that said de-entangling mechanism (50) has blades (550), wherein:
during the rotation of the rotating roller brush (30 or 30 ') about the roller brush rotation axis (31 or 31 ') in the first rotation direction, the roller brush fan (33 or 33 ') sweeps over the de-entangling mechanism with a tendency to escape the blade (550) to form the first physical contact with the de-entangling mechanism (50);
the second physical contact between the brush sector (33 or 33 ') and the de-entanglement mechanism (50) during the rotation of the rotary brush roll (30 or 30 ') in the second rotational direction about the brush roll rotation axis (31 or 31 ') comprises: interference contact which is formed between the rolling brush fan (33 or 33') and the blade part (550) and promotes the cut-off of the winding hairs.
6. The sweeping assembly of claim 5, wherein the de-entangling mechanism (50) further comprises a channeling member (53), wherein:
the leading member (53) guides the brush fan (33 or 33 ') to escape from the blade portion (550) while the rotary brush (30 or 30 ') is rotating around the brush rotating shaft (31 or 31 ') in the first rotating direction;
the persuasion member (53) causes the entangled bristles attached to the brush fan (33 or 33 ') to strike the blade portion (550) during the rotation of the rotary brush (30 or 30 ') in the second rotation direction about the brush rotation shaft (31 or 31 ').
7. The sweeping assembly according to claim 6, wherein the canalizing member (53) is obliquely arranged with respect to the rolling brush rotating shaft (31 or 31 ') to cause the entangled hairs attached to the rolling brush fan (33 or 33') to be combed so as to tend to spread in the circumferential direction of the rolling brush rotating shaft (31 or 31 ') during the guiding of the rolling brush fan (33 or 33').
8. The cleaning assembly according to claim 6, characterized in that said blade (550) is arranged on the side of said cutting member (55) facing said roller brush rotation shaft (31 or 31'), said canalizing member (53) comprising teeth (531) spaced along said blade (550);
wherein tooth tops of the convex teeth (531) protrude beyond the blade portion (550) toward the rolling brush rotation shaft (31 or 31 ') to guide the rolling brush fan (33 or 33 ') to escape from the blade portion (550) in a radial direction of the rolling brush rotation shaft (31 or 31 ') during rotation of the rotary rolling brush (30 or 30 ') about the rolling brush rotation shaft (31 or 31 ') in the first rotation direction;
and, there are tooth grooves (533) exposing the blade part (550) between the teeth (531), and the teeth (531) are hit by the brush fan (33 or 33 ') during the rotation of the rotary brush (30) in the second rotation direction around the brush rotation shaft (31 or 31 '), so that the bristles attached to the brush fan (33 or 33 ') are caught at the teeth (531), and the bristles caught at the teeth (531) are guided by the tooth grooves (533) to hit the blade part (550).
9. The sweeping assembly of claim 2, further comprising a roller housing (10), a housing interior (11) of the roller housing (10) having a roller brush window (13);
wherein one part of the rotary rolling brush (30) is positioned in the housing inner cavity (11), and the other part of the rotary rolling brush protrudes out of the housing inner cavity (11) from the rolling brush window (13);
and, the de-entangling mechanism (50) further comprises a mounting base plate (51), the cutting member (55) is fixed on the mounting base plate (51) to be inserted into the housing inner cavity (11) by the assembly of the mounting base plate (51) and the rolling brush housing (10);
and the assembly of the mounting substrate (51) with the roller brush casing (10) is adjustable, wherein:
when the mounting base plate (51) is constrained against the roller brush casing (10) against an external thrust force of elastic pre-stress, the cutting member (55) is in a position in which the blade (550) is immersed in the casing cavity (11);
when the mounting substrate (51) is driven away from the roller brush housing (10) by the elastic prestress due to the disappearance of the external pushing force, the cutting member (55) is in a hidden state in which the blade part (550) is retracted out of the housing inner cavity (11).
10. The sweeping assembly of claim 9, wherein the de-entangling mechanism (50) further includes a push member (57), wherein:
when the push-pull member (57) is constrained at a specified phase by the external pushing force, the push-pull member (57) pushes the mounting substrate (51) against the roller brush housing (10);
when the external pushing force disappears, the mounting substrate (51) is driven by the elastic prestress to leave the roller brush housing (10) and push the pushing and pulling member (57) to deviate from the specified phase.
11. The cleaning assembly as set forth in claim 9,
the external pushing force is generated in response to a first event that allows the sweeping robot to perform a sweeping task;
the external pushing force is dissipated in response to a second event that allows the housing interior (11) to be cleaned and cured.
12. The cleaning assembly as set forth in claim 11,
the cleaning assembly further comprises an inner cavity shield (20) detachably mounted to the roll brush window (13), wherein:
the first event comprises the inner cavity shield (20) fitting into place with the roll brush window (13);
the second event includes detachment of the inner cavity shield (20) from the roll brush window (13).
13. A sweeping robot comprising a mobile chassis, a suction assembly, and a sweeping assembly according to any one of claims 1 to 12.
14. The sweeping robot of claim 13, further comprising a processor configured to:
when a cleaning task is received, triggering the moving chassis to move along a track designated by the cleaning task, and triggering the driving mechanism (40) to drive the rotary rolling brush (30 or 30') to rotate in the first rotating direction and trigger the suction assembly to operate during the execution period of the cleaning task;
when a trigger event following completion of the sweeping task is detected, the drive mechanism (40) is triggered to drive the rotary drum brush (30 or 30 ') in the second rotational direction for a first preset length of rotation, and the suction assembly is in a stopped state during the rotation of the rotary drum brush (30 or 30') in the second rotational direction.
15. The sweeping robot of claim 14, wherein the processor is further configured to:
after the rotating drum brush (30 or 30 ') has been rotated in the second rotational direction for the first preset length of time, triggering the drive mechanism (40) to drive the rotating drum brush (30 or 30') in the first rotational direction for a second preset length of time, and triggering the suction assembly to operate for the second preset length of time.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110793509.6A CN113287971A (en) | 2021-07-14 | 2021-07-14 | Sweeping assembly for sweeping robot and sweeping robot |
| CN2021107935096 | 2021-07-14 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN113633217A true CN113633217A (en) | 2021-11-12 |
| CN113633217B CN113633217B (en) | 2024-05-10 |
Family
ID=77331082
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202110793509.6A Pending CN113287971A (en) | 2021-07-14 | 2021-07-14 | Sweeping assembly for sweeping robot and sweeping robot |
| CN202111149512.0A Active CN113633217B (en) | 2021-07-14 | 2021-09-29 | Sweeping assembly for sweeping robot and sweeping robot |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202110793509.6A Pending CN113287971A (en) | 2021-07-14 | 2021-07-14 | Sweeping assembly for sweeping robot and sweeping robot |
Country Status (1)
| Country | Link |
|---|---|
| CN (2) | CN113287971A (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022166674A1 (en) * | 2021-02-02 | 2022-08-11 | 添可智能科技有限公司 | Floor brush, hair removing tooth assembly, and movable apparatus |
| CN117883010A (en) * | 2023-09-08 | 2024-04-16 | 九阳股份有限公司 | Surface cleaning device capable of stripping winding |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2588158B (en) * | 2019-10-10 | 2022-02-23 | Dyson Technology Ltd | Cleaner head for a vacuum cleaning appliance |
| KR20230108959A (en) * | 2022-01-12 | 2023-07-19 | 삼성전자주식회사 | Vacuum cleaner |
| KR20240050871A (en) * | 2022-10-12 | 2024-04-19 | 삼성전자주식회사 | Vaccum cleaner |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104248397A (en) * | 2013-06-28 | 2014-12-31 | 科沃斯机器人科技(苏州)有限公司 | Cleaning device, rolling brush cleaning cabin and cleaning system |
| WO2019214045A1 (en) * | 2018-05-08 | 2019-11-14 | 东莞优乐家智能家电有限公司 | Rolling type roller brush hair removal mechanism |
| CN211299812U (en) * | 2019-10-14 | 2020-08-21 | 尚科宁家(中国)科技有限公司 | Cleaning rolling brush and sweeping robot |
| CN112617664A (en) * | 2020-12-24 | 2021-04-09 | 珠海格力电器股份有限公司 | Round brush subassembly, round brush mechanism and robot of sweeping floor |
| CN216652171U (en) * | 2021-07-14 | 2022-06-03 | 杭州萤石软件有限公司 | Sweeping assembly for sweeping robot and sweeping robot |
-
2021
- 2021-07-14 CN CN202110793509.6A patent/CN113287971A/en active Pending
- 2021-09-29 CN CN202111149512.0A patent/CN113633217B/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104248397A (en) * | 2013-06-28 | 2014-12-31 | 科沃斯机器人科技(苏州)有限公司 | Cleaning device, rolling brush cleaning cabin and cleaning system |
| WO2019214045A1 (en) * | 2018-05-08 | 2019-11-14 | 东莞优乐家智能家电有限公司 | Rolling type roller brush hair removal mechanism |
| CN211299812U (en) * | 2019-10-14 | 2020-08-21 | 尚科宁家(中国)科技有限公司 | Cleaning rolling brush and sweeping robot |
| CN112617664A (en) * | 2020-12-24 | 2021-04-09 | 珠海格力电器股份有限公司 | Round brush subassembly, round brush mechanism and robot of sweeping floor |
| CN216652171U (en) * | 2021-07-14 | 2022-06-03 | 杭州萤石软件有限公司 | Sweeping assembly for sweeping robot and sweeping robot |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022166674A1 (en) * | 2021-02-02 | 2022-08-11 | 添可智能科技有限公司 | Floor brush, hair removing tooth assembly, and movable apparatus |
| CN117883010A (en) * | 2023-09-08 | 2024-04-16 | 九阳股份有限公司 | Surface cleaning device capable of stripping winding |
Also Published As
| Publication number | Publication date |
|---|---|
| CN113287971A (en) | 2021-08-24 |
| CN113633217B (en) | 2024-05-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN113633217A (en) | Sweeping assembly for sweeping robot and sweeping robot | |
| KR101823452B1 (en) | Cleaner head | |
| KR102007213B1 (en) | Cleaner head | |
| JP2015506763A (en) | Cleaning device for vacuum cleaner nozzle | |
| CN216652171U (en) | Sweeping assembly for sweeping robot and sweeping robot | |
| JP2008000382A (en) | Suction port body for vacuum cleaner and vacuum cleaner with suction port body | |
| CN210493949U (en) | Floor brush device and dust collector | |
| CN212521670U (en) | Round brush subassembly and cleaning machines people | |
| CN209789756U (en) | Cleaning assembly and sweeping robot | |
| CN214906465U (en) | Base with cutting assembly and cleaning system | |
| CN211299812U (en) | Cleaning rolling brush and sweeping robot | |
| CN115251784A (en) | Cleaning head and surface cleaning equipment | |
| CN111329390A (en) | Dust suction head | |
| CN220309081U (en) | Cleaning device, base station and cleaning device system | |
| CN114668348B (en) | Brush roller and floor washing machine provided with same | |
| CN215605406U (en) | Cleaning device | |
| CN217959934U (en) | Round brush and dust catcher | |
| CN217040016U (en) | Rolling brush device and cleaning robot | |
| CN114532925A (en) | Rolling brush with hair cutting function and sweeper | |
| JPH05317226A (en) | Rotary brush | |
| CN217547916U (en) | Floor brush assembly and cleaning equipment | |
| CN212394794U (en) | Dust suction head | |
| CN220327396U (en) | Rolling brush assembly and cleaning equipment | |
| CN220988676U (en) | Rolling brush structure and cleaning robot | |
| CN218247096U (en) | Round brush and cleaning robot |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |