CN113409366A - 一种遥感卫星影像的辐射校正方法及装置 - Google Patents
一种遥感卫星影像的辐射校正方法及装置 Download PDFInfo
- Publication number
- CN113409366A CN113409366A CN202110731534.1A CN202110731534A CN113409366A CN 113409366 A CN113409366 A CN 113409366A CN 202110731534 A CN202110731534 A CN 202110731534A CN 113409366 A CN113409366 A CN 113409366A
- Authority
- CN
- China
- Prior art keywords
- vignetting
- image
- remote sensing
- sensing satellite
- image block
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/30—Determination of transform parameters for the alignment of images, i.e. image registration
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/90—Dynamic range modification of images or parts thereof
- G06T5/94—Dynamic range modification of images or parts thereof based on local image properties, e.g. for local contrast enhancement
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10032—Satellite or aerial image; Remote sensing
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Image Processing (AREA)
Abstract
本申请提供了一种遥感卫星影像的辐射校正方法及装置。该方法包括:获取遥感卫星影像;遥感卫星影像中包括非渐晕影像块和渐晕影像块;根据非渐晕影像块的整体均值和渐晕影像块的列均值,确定岭回归模型;利用岭回归模型校正渐晕影像块的像素值,获得第一遥感卫星影像;对所述第一遥感卫星影像进行影像配准,获得第二遥感卫星影像;确定第二遥感卫星影像中的重叠区域,并利用平差模型校正重叠区域的像素值,获得第三遥感卫星影像。本申请通过岭回归模型对遥感卫星影像中渐晕区域的像素值进行校正,以及通过平差模型对卫星影像中重叠区域的像素值进行优化,解决了卫星影像中的渐晕和色差问题,使得最终获得卫星影像更加清晰。
Description
技术领域
本申请涉及遥感卫星影像辐射校正技术领域,尤其涉及一种遥感卫星影像的辐射校正方法及装置。
背景技术
遥感卫星采集的数据通常有不同的级别(0级到4级)。0级数据是地面站接收到的未经进一步处理的遥感卫星采集的原始数据,它们承载着最原始、最完整的信息,可以用来生成更高级别的产品。
目前遥感卫星成像常用的是有推扫式成像系统,推扫式成像系统由光学焦平面和电荷耦合器件(charge coupled device,CCD)组成,也称为CCD图像传感器。由于入射光线的一部分被有效孔径大小遮挡,引起CCD响应不均匀,成像过程中亮度值会衰减,导致CCD影像边缘出现渐晕现象。此外,遥感卫星影像由于是多个CCD生成的影像拼接而成,在拼接处的重叠区域还存在色差现象。
现有技术通常运用侧滑数据进行遥感卫星影像的渐晕校正,然而这些侧滑数据较难获取,并且渐晕校正的精确度较低。在校正色差时,多针对2张影像之间的色差均衡,不适用高分遥感卫星影像的色差校正。
发明内容
本申请实施例提供了一种遥感卫星影像的辐射校正方法及装置,利用遥感卫星影像中渐晕影像的列均值和非渐晕影像的整体均值拟合出的岭回归模型对渐晕影像进行校正,以及利用平差模型对遥感卫星影像中重叠区域的影像进行色差优化,消除了遥感卫星影像中的渐晕和色差,使得遥感卫星影像更加清晰。
第一方面,本申请实施例提供了一种遥感卫星影像的辐射校正方法,该方法包括:获取遥感卫星影像;所述遥感卫星影像中包括非渐晕影像块和渐晕影像块;根据所述非渐晕影像块的整体均值和所述渐晕影像块的列均值,确定岭回归模型;利用所述岭回归模型校正所述渐晕影像块的像素值,获得第一遥感卫星影像;对所述第一遥感卫星影像进行影像配准,获得第二遥感卫星影像;确定所述第二遥感卫星影像中的重叠区域,并利用平差模型校正所述重叠区域的像素值,获得第三遥感卫星影像。
该实施方式采用非渐晕影像块的整体均值和渐晕影像块的列均值之间的岭回归模型对渐晕的像素值进行校正,采用平差模型对影像配准后的重叠区域的像素值进行平差优化,可消除影像中的渐晕问题和影像中重叠区域的色差问题,使得影像更加清晰。
在一种可能的实施方式中,所述根据所述非渐晕影像块的整体均值和所述渐晕影像块的列均值,确定岭回归模型包括:根据所述非渐晕影像块的灰度共生矩阵,确定所述非渐晕影像块为第一非渐晕影像块;对所述第一非渐晕影像块的整体均值和所述渐晕影像块的列均值进行岭回归拟合,获得所述岭回归模型。
该实施方式通过灰度共生矩阵在非渐晕影像块中筛选出纹理均匀的第一非渐晕影像块作为岭回归模型拟合的依据,使得岭回归模型更加精确,可以使得校正后的影像更加清晰。
在一种可能的实施方式中,所述根据所述非渐晕影像块的灰度共生矩阵,确定所述非渐晕影像块为第一非渐晕影像块包括:根据所述非渐晕影像块的灰度共生矩阵,确定所述非渐晕影像块的逆差矩和熵值;根据所述非渐晕影像块的逆差矩和熵值,以及逆差矩阈值和熵阈值,确定所述非渐晕影像块为第一非渐晕影像块。
该实施方式根据逆差矩和熵值对非渐晕影像块进行筛选,可以获得纹理均匀的非渐晕影像块。
在一种可能的实施方式中,所述利用所述岭回归模型校正所述渐晕影像块,获得第一遥感卫星影像包括:将所述渐晕影像块中所述列均值对应的像素值输入所述岭回归模型,获得所述岭回归模型输出的像素值;将所述列像素均值对应的像素值调整为所述岭回归模型输出的像素值,获得第一影像块;所述第一遥感卫星影像包括所述非渐晕影像块和所述第一影像块。
该实施方式采用岭回归模型校正渐晕影像块,可以解决影像中的渐晕问题。
在一种可能的实施方式中,所述方法还包括:在所述对所述第一遥感卫星影像进行影像配准之前,将所述第一遥感卫星影像中大于像素阈值的像素值调整为所述像素阈值。
在一种可能的实施方式中,所述利用平差模型校正所述第二遥感卫星影像中重叠区域的像素值,获得第三遥感卫星影像包括:将所述重叠区域的像素值输入平差模型,采用梯度下降法迭代更新所述平差模型的参数;当所述平差模型的参数满足迭代终止条件时,获得所述平差优化模型输出的第二像素值;将所述重叠区域的像素值调整为所述第二像素值,获得第三遥感卫星影像。
该实施方式采用平差模型校正第二遥感卫星影像中重叠区域的像素值,可以解决重叠区域的色差现象。
第二方面,本申请实施例提供了一种遥感卫星影像的辐射校正装置,所述装置包括:获取模块,用于获取遥感卫星影像;所述遥感卫星影像中包括非渐晕影像块和渐晕影像块;第一校正模块,用于根据所述非渐晕影像块的整体均值和所述渐晕影像块的列均值,确定岭回归模型,以及利用所述岭回归模型校正所述渐晕影像块的像素值,获得第一遥感卫星影像;配准模块,用于对所述第一遥感卫星影像进行影像配准,获得第二遥感卫星影像;第二校正模块,用于确定所述第二遥感卫星影像中的重叠区域,并利用平差模型校正所述重叠区域的像素值,获得第三遥感卫星影像。
在一种可能的实施方式中,所述第一校正模块具体用于:根据所述非渐晕影像块的灰度共生矩阵,确定所述非渐晕影像块为第一非渐晕影像块;对所述第一非渐晕影像块的整体均值和所述渐晕影像块的列均值进行岭回归拟合,获得所述岭回归模型。
在一种可能的实施方式中,所述第一校正模块还用于:根据所述非渐晕影像块的灰度共生矩阵,确定所述非渐晕影像块的逆差矩和熵值;根据所述非渐晕影像块的逆差矩和熵值,以及逆差矩阈值和熵阈值,确定所述非渐晕影像块为第一非渐晕影像块。
在一种可能的实施方式中,所述第一校正模块具体用于:将所述渐晕影像块中所述列均值对应的像素值输入所述岭回归模型,获得所述岭回归模型输出的像素值;将所述列像素均值对应的像素值调整为所述岭回归模型输出的像素值,获得第一影像块;所述第一遥感卫星影像包括所述非渐晕影像块和所述第一影像块。
在一种可能的实施方式中,所述配准模块还用于:在所述对所述第一遥感卫星影像进行影像配准之前,将所述第一遥感卫星影像中大于像素阈值的像素值调整为所述像素阈值。
在一种可能的实施方式中,所述第二校正模块具体用于:将所述重叠区域的像素值输入平差模型,采用梯度下降法迭代更新所述平差模型的参数;当所述平差模型的参数满足迭代终止条件时,获得所述平差优化模型输出的第二像素值;将所述重叠区域的像素值调整为所述第二像素值,获得第三遥感卫星影像。
第三方面,本申请实施例还提供一种计算设备,所述计算设备包括存储器和处理器,所述存储器存储有计算机指令,所述处理器执行所述计算机指令时实现上述第一方面及其可选实施方式中的任一方案。
上述提供的第二方面的校正装置和第三方面的计算设备用于执行第一方面所提供的方法,因此,其所能达到的有益效果可参考上文提供的对应方法中的对应方案的有益效果,此处不再赘述。
附图说明
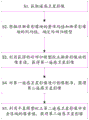
图1是本申请实施例提供的一种遥感卫星影像辐射校正方法的流程图;
图2a和图2b分别是本申请实施例提供的渐晕校正前和后的遥感卫星影像的示意图;
图3a-图3c是本申请实施例提供的色差校正前的遥感卫星影像的示意图;
图4a-图4c是本申请实施例提供的色差校正后的遥感卫星影像的示意图;
图5是本申请实施例提供的一种遥感卫星影像辐射校正装置的结构示意图。
具体实施方式
为了使本申请实施例的目的、技术方案和优点更加清楚,下面将结合附图,对本申请实施例中的技术方案进行描述。
在本申请实施例的描述中,“示例性的”、“例如”或者“举例来说”等词用于表示作例子、例证或说明。本申请实施例中被描述为“示例性的”、“例如”或者“举例来说”的任何实施例或设计方案不应被解释为比其它实施例或设计方案更优选或更具优势。确切而言,使用“示例性的”、“例如”或者“举例来说”等词旨在以具体方式呈现相关概念。
在本申请实施例的描述中,术语“和/或”,仅仅是一种描述关联对象的关联关系,表示可以存在三种关系,例如,A和/或B,可以表示:单独存在A,单独存在B,同时存在A和B这三种情况。另外,除非另有说明,术语“多个”的含义是指两个或两个以上。例如,多个系统是指两个或两个以上的系统,多个屏幕终端是指两个或两个以上的屏幕终端。
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。术语“包括”、“包含”、“具有”及它们的变形都意味着“包括但不限于”,除非是以其他方式另外特别强调。
图1是本申请实施例提供的一种遥感卫星影像辐射校正方法的流程图。如图所示,该方法包括如下的步骤S1-步骤S5。
在步骤S1中,获取遥感卫星影像。
本实施例中,遥感卫星影像可以是未被校正的0级影像,遥感卫星影像中包括非渐晕影像块和渐晕影像块。
在一个示例中,可以按照渐晕区域的宽度,将遥感卫星影像中的渐晕区域和非渐晕区域划分为多个影像块,从而获得非渐晕影像块和渐晕影像块。示例性的,如图2a所示的遥感卫星影像图,该卫星影像图中的黑色条是渐晕区域,除黑色条之外的其他部分是非渐晕区域。可选地,非渐晕影像块和渐晕影像块可以是100×100大小的影像块。可以理解的,遥感卫星影像可以包括至少一个非渐晕影像块和至少一个渐晕影像块。
在步骤S2中,根据非渐晕影像块的整体均值和渐晕影像块的列均值,确定岭回归模型。
本实施例中,可以先计算每个非渐晕影像块中所有像素的整体均值,以及计算每个渐晕影像块中每列像素的列均值,然后对整体均值和列均值进行岭回归拟合,获得岭回归模型的参数,从而获得非渐晕影像块和渐晕影像块之间的岭回归模型。其中,列均值为所述岭回归函数的输入量,整体均值为所述岭回归函数的输出量。可以理解的,渐晕影像块中每列的列均值对应一个岭回归模型的参数。
在一个示例中,在获得岭回归模型时,可以根据非渐晕影像块的灰度共生矩阵,在至少一个非渐晕影像块中确定出纹理均匀的第一非渐晕影像块,将第一非渐晕影像块的整体均值用于岭回归拟合。具体地,在获得每个非渐晕影像块的灰度共生矩阵之后,根据灰度共生矩阵计算每个非渐晕影像块的逆差矩和熵值,然后根据预先设定的逆差矩阈值和熵阈值,在至少一个非渐晕影像块中筛选出第一非渐晕影像块。可选地,可以将逆差矩大于逆差矩阈值和熵小于熵阈值的非渐晕影像块视为纹理均匀的第一非渐晕影像块。
在步骤S3中,利用岭回归模型校正渐晕影像块的像素值,以获得第一遥感卫星影像。
本实施例中,在获得岭回归模型之后,将渐晕影像块中列均值对应的像素值输入岭回归模型中进行渐晕校正,获得岭回归模型输出的校正后的像素值。然后将渐晕影像块列均值对应的该像素值调整为岭回归模型输出的像素值,从而获得渐晕影像块对应的经过校正后的第一影像块。重复这个过程,直至渐晕影像块中列均值对应的所有像素值均被渐晕校正。可以理解的,第一遥感卫星影像是经过渐晕校正获得,因此,第一遥感卫星影像包括没有经过渐晕校正的非渐晕影像块和渐晕校正获得的第一影像块。在一个示例中,还可以将渐晕影像块中列均值对应的一列像素值全部输入岭回归模型中进行渐晕校正,对应的,岭回归模型也输出一列像素值,然后将列均值对应的一列像素值调整为岭回归模型也输出一列像素值,获得经过校正后的第一影像块。
示例性的,在将图2a的渐晕影像块的像素值代入岭回归模型进行渐晕校正,可以得到如图2b所示的校正后的卫星影像,可以看到,在图2b中,经过岭回归模型校正后,消除了其中的渐晕问题,让影像更加清晰可辨。
在步骤S4中,对第一遥感卫星影像进行影像配准,获得第二遥感卫星影像。
本实施例中,可以采用相位相关法获得第一遥感卫星影像的位移差,基于位移差对第一遥感卫星影像进行亚像素级影像配准,获得配准后的第二遥感卫星影像。具体地,可以根据获得的位移差对第一遥感卫星影像进行影像配准,从而获得第二遥感卫星影像。影像配准还可以采用本领域常规的配准方法,不限于本实施例中提供的相位相关法的配准方法。
在步骤S5中,确定第二遥感卫星影像中的重叠区域,并利用平差模型校正所述第二遥感卫星影像中重叠区域的像素值,获得第三遥感卫星影像。
本实施例中,可以将平差模型的参数初始化,然后将重叠区域的像素值输入平差模型,并采用梯度下降法迭代更新平差模型的参数,当平差模型迭代更新后的参数满足迭代终止条件时,获得平差优化模型输出的重叠区域的第二像素值;最后,将重叠区域的像素值调整为第二像素值,即可实现对重叠区域中的影像的色差校正,第二遥感卫星影像经过校正之后,即为第三遥感卫星影像。
在一个示例中,可以按照预设的像素值区间和每个区间的像素值个数从重叠区域的所有像素值中筛选出像素值样本,然后将像素值样本用于平差模型的训练,确定出平差模型的参数。然后再利用平差模型对重叠区域的所有像素值进行平差优化,平差优化的过程见前述的介绍。这样可以节省确定平差模型的时间,提高效率。可选地,为了保证平差模型的精确度,像素值区间可以设为30,每个区间的像素值可以设为500。
示例性的,如图3a、图3b和图3c所示的卫星影像,如图中的标记,三幅影像中都存在明显的色差现象,因此,在通过像素值样本确定出平差模型之后,使用平差模型对图3a、图3b和图3c所示的卫星影像中重叠区域的影像进行色差优化,即将三幅影像中重叠区域的像素值代入平差模型,然后将重叠区域的像素值调整为平差模型输出的对应的像素值。图3a、图3b和图3c所示三幅影像经色差优化获得的卫星影像分别如图4a、图4b和图4c所示,其中,图4a是图3a的影像经色差优化后的影像图,图4b是图3b的影像经色差优化后的影像图,图4c是图3c的影像经色差优化后的影像图。以图4a为例,从图中可以明显看出,与图3a相同标记位置处,本申请的方法可以消除影像的色差问题
在一个可选的实施方式中,在对第一遥感卫星影像进行影像配准之前,将第一遥感卫星影像中大于像素阈值的像素值调整为像素阈值,其中,像素阈值可以根据CCD图像传感器的最大接收亮度值设定。
图5是本申请实施例提供的一种遥感卫星影像辐射校正装置的示意图。如图5所示,该装置包括获取模块、第一校正模块、第一校正模块、配准模块和第二校正模块,其中,获取模块,用于获取遥感卫星影像;所述遥感卫星影像中包括非渐晕影像块和渐晕影像块;第一校正模块,用于根据所述非渐晕影像块的整体均值和所述渐晕影像块的列均值,确定岭回归模型,以及利用所述岭回归模型校正所述渐晕影像块的像素值,获得第一遥感卫星影像;配准模块,用于对所述第一遥感卫星影像进行影像配准,获得第二遥感卫星影像;第二校正模块,用于确定所述第二遥感卫星影像中的重叠区域,并利用平差模型校正所述重叠区域的像素值,获得第三遥感卫星影像。
可以理解的,上述校正装置仅仅是本申请实施例的一种示例,并不限值其具体划分,因此,在其他实施例中,校正装置可以包括高于或低于相比上述五个模块的模块,来实现本申请方法实施例记载的方法步骤。
在一种可能的实施方式中,所述第一校正模块具体用于:根据所述非渐晕影像块的灰度共生矩阵,确定所述非渐晕影像块为第一非渐晕影像块;对所述第一非渐晕影像块的整体均值和所述渐晕影像块的列均值进行岭回归拟合,获得所述岭回归模型。
在一种可能的实施方式中,所述第一校正模块还用于:根据所述非渐晕影像块的灰度共生矩阵,确定所述非渐晕影像块的逆差矩和熵值;根据所述非渐晕影像块的逆差矩和熵值,以及逆差矩阈值和熵阈值,确定所述非渐晕影像块为第一非渐晕影像块。
在一种可能的实施方式中,所述第一校正模块具体用于:将所述渐晕影像块中所述列均值对应的像素值输入所述岭回归模型,获得所述岭回归模型输出的像素值;将所述列像素均值对应的像素值调整为所述岭回归模型输出的像素值,获得第一影像块;所述第一遥感卫星影像包括所述非渐晕影像块和所述第一影像块。
在一种可能的实施方式中,所述配准模块还用于:在所述对所述第一遥感卫星影像进行影像配准之前,将所述第一遥感卫星影像中大于像素阈值的像素值调整为所述像素阈值。
在一种可能的实施方式中,所述第二校正模块具体用于:将所述重叠区域的像素值输入平差模型,采用梯度下降法迭代更新所述平差模型的参数;当所述平差模型的参数满足迭代终止条件时,获得所述平差优化模型输出的第二像素值;将所述重叠区域的像素值调整为所述第二像素值,获得第三遥感卫星影像。
本申请实施例还提供一种计算设备,该计算设备包括存储器和处理器。其中,存储器中存储有计算机指令,处理器读取该计算机指令时,实现上述方法实施例中的方法步骤。
可以理解的是,本申请的实施例中的处理器可以是中央处理单元(centralprocessing unit,CPU),还可以是其他通用处理器、数字信号处理器(digital signalprocessor,DSP)、专用集成电路(application specific integrated circuit,ASIC)、现场可编程门阵列(field programmable gate array,FPGA)或者其他可编程逻辑器件、晶体管逻辑器件,硬件部件或者其任意组合。通用处理器可以是微处理器,也可以是任何常规的处理器。
本申请的实施例中的方法步骤可以通过硬件的方式来实现,也可以由处理器执行软件指令的方式来实现。软件指令可以由相应的软件模块组成,软件模块可以被存放于随机存取存储器(random access memory,RAM)、闪存、只读存储器(read-only memory,ROM)、可编程只读存储器(programmable rom,PROM)、可擦除可编程只读存储器(erasable PROM,EPROM)、电可擦除可编程只读存储器(electrically EPROM,EEPROM)、寄存器、硬盘、移动硬盘、CD-ROM或者本领域熟知的任何其它形式的存储介质中。一种示例性的存储介质耦合至处理器,从而使处理器能够从该存储介质读取信息,且可向该存储介质写入信息。当然,存储介质也可以是处理器的组成部分。处理器和存储介质可以位于ASIC中。
在上述实施例中,可以全部或部分地通过软件、硬件、固件或者其任意组合来实现。当使用软件实现时,可以全部或部分地以计算机程序产品的形式实现。所述计算机程序产品包括一个或多个计算机指令。在计算机上加载和执行所述计算机程序指令时,全部或部分地产生按照本申请实施例所述的流程或功能。所述计算机可以是通用计算机、专用计算机、计算机网络、或者其他可编程装置。所述计算机指令可以存储在计算机可读存储介质中,或者通过所述计算机可读存储介质进行传输。所述计算机指令可以从一个网站站点、计算机、服务器或数据中心通过有线(例如同轴电缆、光纤、数字用户线(DSL))或无线(例如红外、无线、微波等)方式向另一个网站站点、计算机、服务器或数据中心进行传输。所述计算机可读存储介质可以是计算机能够存取的任何可用介质或者是包含一个或多个可用介质集成的服务器、数据中心等数据存储设备。所述可用介质可以是磁性介质,(例如,软盘、硬盘、磁带)、光介质(例如,DVD)、或者半导体介质(例如固态硬盘(solid state disk,SSD))等。
可以理解的是,在本申请的实施例中涉及的各种数字编号仅为描述方便进行的区分,并不用来限制本申请的实施例的范围。
Claims (12)
1.一种遥感卫星影像的辐射校正方法,其特征在于,所述方法包括:
获取遥感卫星影像;所述遥感卫星影像中包括非渐晕影像块和渐晕影像块;
根据所述非渐晕影像块的整体均值和所述渐晕影像块的列均值,确定岭回归模型;
利用所述岭回归模型校正所述渐晕影像块的像素值,获得第一遥感卫星影像;
对所述第一遥感卫星影像进行影像配准,获得第二遥感卫星影像;
确定所述第二遥感卫星影像中的重叠区域,并利用平差模型校正所述重叠区域的像素值,获得第三遥感卫星影像。
2.根据权利要求1所述的方法,其特征在于,所述根据所述非渐晕影像块的整体均值和所述渐晕影像块的列均值,确定岭回归模型包括:
根据所述非渐晕影像块的灰度共生矩阵,确定所述非渐晕影像块为第一非渐晕影像块;
对所述第一非渐晕影像块的整体均值和所述渐晕影像块的列均值进行岭回归拟合,获得所述岭回归模型。
3.根据权利要求2所述的方法,其特征在于,所述根据所述非渐晕影像块的灰度共生矩阵,确定所述非渐晕影像块为第一非渐晕影像块包括:
根据所述非渐晕影像块的灰度共生矩阵,确定所述非渐晕影像块的逆差矩和熵值;
根据所述非渐晕影像块的逆差矩和熵值,以及逆差矩阈值和熵阈值,确定所述非渐晕影像块为第一非渐晕影像块。
4.根据权利要求1所述的方法,其特征在于,所述利用所述岭回归模型校正所述渐晕影像块,获得第一遥感卫星影像包括:
将所述渐晕影像块中所述列均值对应的像素值输入所述岭回归模型,获得所述岭回归模型输出的像素值;
将所述列像素均值对应的像素值调整为所述岭回归模型输出的像素值,获得第一影像块;所述第一遥感卫星影像包括所述非渐晕影像块和所述第一影像块。
5.根据权利要求1所述的方法,其特征在于,所述方法还包括:
在所述对所述第一遥感卫星影像进行影像配准之前,将所述第一遥感卫星影像中大于像素阈值的像素值调整为所述像素阈值。
6.根据权利要求1所述的方法,其特征在于,所述利用平差模型校正所述第二遥感卫星影像中重叠区域的像素值,获得第三遥感卫星影像包括:
将所述重叠区域的像素值输入平差模型,采用梯度下降法迭代更新所述平差模型的参数;
当所述平差模型的参数满足迭代终止条件时,获得所述平差优化模型输出的第二像素值;
将所述重叠区域的像素值调整为所述第二像素值,获得第三遥感卫星影像。
7.一种遥感卫星影像的辐射校正装置,其特征在于,所述装置包括:
获取模块,用于获取遥感卫星影像;所述遥感卫星影像中包括非渐晕影像块和渐晕影像块;
第一校正模块,用于根据所述非渐晕影像块的整体均值和所述渐晕影像块的列均值,确定岭回归模型;
第一校正模块,还用于利用所述岭回归模型校正所述渐晕影像块的像素值,获得第一遥感卫星影像;
配准模块,用于对所述第一遥感卫星影像进行影像配准,获得第二遥感卫星影像;
第二校正模块,用于确定所述第二遥感卫星影像中的重叠区域,并利用平差模型校正所述重叠区域的像素值,获得第三遥感卫星影像。
8.根据权利要求7所述的装置,其特征在于,所述第一校正模块具体用于:
根据所述非渐晕影像块的灰度共生矩阵,确定所述非渐晕影像块为第一非渐晕影像块;
对所述第一非渐晕影像块的整体均值和所述渐晕影像块的列均值进行岭回归拟合,获得所述岭回归模型。
9.根据权利要求8所述的装置,其特征在于,所述第一校正模块还用于:
根据所述非渐晕影像块的灰度共生矩阵,确定所述非渐晕影像块的逆差矩和熵值;
根据所述非渐晕影像块的逆差矩和熵值,以及逆差矩阈值和熵阈值,确定所述非渐晕影像块为第一非渐晕影像块。
10.根据权利要求7所述的装置,其特征在于,所述第一校正模块具体用于:
将所述渐晕影像块中所述列均值对应的像素值输入所述岭回归模型,获得所述岭回归模型输出的像素值;
将所述列像素均值对应的像素值调整为所述岭回归模型输出的像素值,获得第一影像块;所述第一遥感卫星影像包括所述非渐晕影像块和所述第一影像块。
11.根据权利要求7所述的装置,其特征在于,所述配准模块还用于:
在所述对所述第一遥感卫星影像进行影像配准之前,将所述第一遥感卫星影像中大于像素阈值的像素值调整为所述像素阈值。
12.根据权利要求7所述的装置,其特征在于,所述第二校正模块具体用于:
将所述重叠区域的像素值输入平差模型,采用梯度下降法迭代更新所述平差模型的参数;
当所述平差模型的参数满足迭代终止条件时,获得所述平差优化模型输出的第二像素值;
将所述重叠区域的像素值调整为所述第二像素值,获得第三遥感卫星影像。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110731534.1A CN113409366B (zh) | 2021-06-29 | 2021-06-29 | 一种遥感卫星影像的辐射校正方法及装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110731534.1A CN113409366B (zh) | 2021-06-29 | 2021-06-29 | 一种遥感卫星影像的辐射校正方法及装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN113409366A true CN113409366A (zh) | 2021-09-17 |
| CN113409366B CN113409366B (zh) | 2022-11-22 |
Family
ID=77680214
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202110731534.1A Active CN113409366B (zh) | 2021-06-29 | 2021-06-29 | 一种遥感卫星影像的辐射校正方法及装置 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN113409366B (zh) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115690603A (zh) * | 2022-11-07 | 2023-02-03 | 中国科学院空天信息创新研究院 | 一种消除夜光遥感影像渐晕和条纹的辐射校正方法及装置 |
| CN120259147A (zh) * | 2025-05-21 | 2025-07-04 | 北京理工大学 | 一种基于梯度先验的红外图像非均匀性渐晕矫正方法 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20060204128A1 (en) * | 2005-03-07 | 2006-09-14 | Silverstein D A | System and method for correcting image vignetting |
| CN102937454A (zh) * | 2012-11-13 | 2013-02-20 | 航天恒星科技有限公司 | 一种全反射光学拼接相机的能量补偿与色差消除方法 |
| CN108055487A (zh) * | 2017-12-19 | 2018-05-18 | 清华大学 | 像感器阵列不均匀性的一致校正方法及系统 |
| US10325370B1 (en) * | 2016-05-31 | 2019-06-18 | University Of New Brunswick | Method and system of coregistration of remote sensing images |
| CN112233190A (zh) * | 2020-05-19 | 2021-01-15 | 同济大学 | 一种基于区域网平差的卫星遥感影像色彩均衡方法 |
| CN112529807A (zh) * | 2020-12-15 | 2021-03-19 | 北京道达天际科技有限公司 | 卫星影像的相对辐射校正方法和装置 |
-
2021
- 2021-06-29 CN CN202110731534.1A patent/CN113409366B/zh active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20060204128A1 (en) * | 2005-03-07 | 2006-09-14 | Silverstein D A | System and method for correcting image vignetting |
| CN102937454A (zh) * | 2012-11-13 | 2013-02-20 | 航天恒星科技有限公司 | 一种全反射光学拼接相机的能量补偿与色差消除方法 |
| US10325370B1 (en) * | 2016-05-31 | 2019-06-18 | University Of New Brunswick | Method and system of coregistration of remote sensing images |
| CN108055487A (zh) * | 2017-12-19 | 2018-05-18 | 清华大学 | 像感器阵列不均匀性的一致校正方法及系统 |
| CN112233190A (zh) * | 2020-05-19 | 2021-01-15 | 同济大学 | 一种基于区域网平差的卫星遥感影像色彩均衡方法 |
| CN112529807A (zh) * | 2020-12-15 | 2021-03-19 | 北京道达天际科技有限公司 | 卫星影像的相对辐射校正方法和装置 |
Non-Patent Citations (3)
| Title |
|---|
| 张兆明 等: "一种改进的遥感影像地形校正物理模型", 《光谱学与光谱分析》 * |
| 邵艳坡 等: "遥感影像相对辐射校正的PIF方法", 《国土资源遥感》 * |
| 黄莉婷 等: "基于正则化IR-MAD的GF-1影像辐射归一化", 《遥感信息》 * |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115690603A (zh) * | 2022-11-07 | 2023-02-03 | 中国科学院空天信息创新研究院 | 一种消除夜光遥感影像渐晕和条纹的辐射校正方法及装置 |
| CN120259147A (zh) * | 2025-05-21 | 2025-07-04 | 北京理工大学 | 一种基于梯度先验的红外图像非均匀性渐晕矫正方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN113409366B (zh) | 2022-11-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN103528690B (zh) | 一种红外热像仪的非均匀校正方法 | |
| CN112862895B (zh) | 一种鱼眼摄像头标定方法、装置及系统 | |
| CN112529807B (zh) | 卫星影像的相对辐射校正方法和装置 | |
| TWI328962B (zh) | ||
| CN100585634C (zh) | 一种星载tdiccd相机的相对辐射校正方法 | |
| CN101889869B (zh) | 摄像设备及其控制方法 | |
| CN103226819A (zh) | 一种基于分段统计的相对辐射校正方法 | |
| CN105869129B (zh) | 针对非均匀校正后的热红外图像剩余非均匀噪声去除方法 | |
| CN113409366A (zh) | 一种遥感卫星影像的辐射校正方法及装置 | |
| CN107818542A (zh) | 一种图像变形的修复方法及装置 | |
| US20250024137A1 (en) | Information processing apparatus, information processing method, and information processing program | |
| CN111179184B (zh) | 基于随机抽样一致性的鱼眼图像有效区域提取方法 | |
| CN112738503A (zh) | 一种小景深镜头相机水平度判定调整的装置及方法 | |
| CN114331975A (zh) | 显示屏显示缺陷检测方法及装置 | |
| CN114240801B (zh) | 一种遥感图像非均匀校正方法 | |
| CN110542482B (zh) | 一种盲元检测方法、装置及电子设备 | |
| CN119273587B (zh) | 光学卫星颤振处理方法及装置 | |
| US7796153B1 (en) | Equalization system and method for an imaging sensor | |
| CN114663530B (zh) | 一种遥感影像偏航90度的相对辐射定标方法和装置 | |
| CN110728714B (zh) | 图像处理方法和装置、存储介质、电子设备 | |
| JPWO2023005943A5 (zh) | ||
| KR20190113251A (ko) | 열화상 카메라의 불균일 상태 보정 방법 | |
| CN115144010B (zh) | 图像传感器非均匀性与非线性度同步标定与校正方法 | |
| CN114820376B (zh) | 条带噪声的融合校正方法、装置、电子设备及存储介质 | |
| KR102166981B1 (ko) | 열화상 카메라의 불균일 상태 보정 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |