CN113353061A - Four-motor-driven FSAE racing car electronic differential algorithm based on sliding mode control - Google Patents
Four-motor-driven FSAE racing car electronic differential algorithm based on sliding mode control Download PDFInfo
- Publication number
- CN113353061A CN113353061A CN202110795698.0A CN202110795698A CN113353061A CN 113353061 A CN113353061 A CN 113353061A CN 202110795698 A CN202110795698 A CN 202110795698A CN 113353061 A CN113353061 A CN 113353061A
- Authority
- CN
- China
- Prior art keywords
- sliding mode
- electronic differential
- algorithm based
- differential algorithm
- fsae racing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000013459 approach Methods 0.000 claims abstract description 9
- SAZUGELZHZOXHB-UHFFFAOYSA-N acecarbromal Chemical compound CCC(Br)(CC)C(=O)NC(=O)NC(C)=O SAZUGELZHZOXHB-UHFFFAOYSA-N 0.000 abstract description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 238000011217 control strategy Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/02—Control of vehicle driving stability
- B60W30/045—Improving turning performance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/32—Control or regulation of multiple-unit electrically-propelled vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2220/00—Electrical machine types; Structures or applications thereof
- B60L2220/40—Electrical machine applications
- B60L2220/42—Electrical machine applications with use of more than one motor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/423—Torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/46—Drive Train control parameters related to wheels
- B60L2240/463—Torque
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Power Engineering (AREA)
- Automation & Control Theory (AREA)
- Arrangement And Mounting Of Devices That Control Transmission Of Motive Force (AREA)
- Retarders (AREA)
Abstract
Description
技术领域technical field
本发明涉及四电机驱动FSAE赛车控制技术领域,具体是一种基于滑模控制的四电机驱动FSAE赛车电子差速算法。The invention relates to the technical field of four-motor-driven FSAE racing car control, in particular to a four-motor-driven FSAE racing car electronic differential algorithm based on sliding mode control.
背景技术Background technique
中国大学生方程式汽车大赛是一项由高等院校相关专业在校学生组队参加的汽车设计与制造比赛。各参赛车队按照赛事规则和赛车制造标准,在一年的时间内自行设计制造出一台小型单人座休闲赛车,能够成功完成赛事环节的比赛。赛事分为油车组,电车组和无人车组。其中电车有采取单电机,双电机,四电机驱动三种驱动方案。The China Formula Student Competition is an automobile design and manufacturing competition organized by students from related majors in colleges and universities. Each participating team designed and manufactured a small single-seater recreational racing car within one year in accordance with the competition rules and racing car manufacturing standards, which was able to successfully complete the competition. The race is divided into oil car group, tram group and unmanned car group. Among them, trams have three driving schemes: single-motor, dual-motor and four-motor drive.
近年来,由于四电机驱动在动力性,操作性等方面的优异性能,采用四电机驱动的车队逐年增多。In recent years, due to the excellent performance of the four-motor drive in terms of power and maneuverability, the number of fleets using the four-motor drive has increased year by year.
四电机驱动采用四个电机分别直接驱动四个车轮,取消了传统机械差速器,在转向或行驶在不平路面上时,此时需求外轮转动速度快过内轮,如果此时仍采用内外轮相同力矩输出的话,不仅不能充分发挥轮胎的抓地性能,还可能会导致车辆过分不足转向,减速箱零部件受力情况恶劣等不良情况,对车辆操稳性造成不利影响。Four-motor drive uses four motors to directly drive the four wheels, eliminating the traditional mechanical differential. When turning or driving on uneven roads, the outer wheel needs to rotate faster than the inner wheel. If the inner and outer wheels are still used at this time. If the torque output is the same, not only the grip performance of the tires cannot be fully exerted, but it may also cause the vehicle to be excessively understeered, and the gear box parts are under severe stress, which will adversely affect the vehicle handling stability.
为解决这个问题,在车上搭载电子差速系统是主要解决方案。在这个问题上,许多控制策略已被应用其中。例如基于阿克曼转向模型获得内外轮转速目标值,再采用PI控制或滑模控制对驱动轮转速进行控制。To solve this problem, the electronic differential system is the main solution in the car. On this issue, many control strategies have been applied. For example, based on the Ackerman steering model, the target values of inner and outer wheel speeds are obtained, and then PI control or sliding mode control is used to control the speed of the driving wheels.
虽然上述工作对提高车辆性能取得了较大进展,但没有充分发挥到四电机驱动赛车可直接单独控制各轮驱动力矩的优势,也未充分考虑轮胎性能是否充分发挥问题。因此为了更好的提高车辆操稳性,可以考虑采用转矩控制来进行电子差速。因此,本发明提出了一种基于滑模控制的四电机驱动FSAE赛车电子差速算法以解决上述背景技术中提出的问题。Although the above work has made great progress in improving vehicle performance, it has not fully exploited the advantages of four-motor-driven racing cars that can directly and independently control the driving torque of each wheel, and has not fully considered whether the tire performance is fully utilized. Therefore, in order to better improve the vehicle handling stability, torque control can be considered for electronic differential. Therefore, the present invention proposes an electronic differential algorithm of four-motor drive FSAE racing car based on sliding mode control to solve the above-mentioned problems in the background art.
发明内容SUMMARY OF THE INVENTION
本发明的目的在于提供一种基于滑模控制的四电机驱动FSAE赛车电子差速算法,以解决上述背景技术中提出的问题。The purpose of the present invention is to provide a four-motor-driven FSAE racing electronic differential algorithm based on sliding mode control, so as to solve the problems raised in the above background technology.
为实现上述目的,本发明提供如下技术方案:To achieve the above object, the present invention provides the following technical solutions:
一种基于滑模控制的四电机驱动FSAE赛车电子差速算法,包括以下步骤:A four-motor drive FSAE racing electronic differential algorithm based on sliding mode control includes the following steps:
构建二自由度车辆模型,根据二自由度车辆模型和车辆传感器数据,计算理想横摆角速度;Build a two-degree-of-freedom vehicle model, and calculate the ideal yaw rate based on the two-degree-of-freedom vehicle model and vehicle sensor data;
构建滑模变控器,通过滑模变控器,计算出所需横摆力矩;Build a sliding mode controller, and calculate the required yaw moment through the sliding mode controller;
构建转矩分配算法,计算各所需轮分配的转矩,进行转矩分配。The torque distribution algorithm is constructed, the torque distributed by each required wheel is calculated, and the torque distribution is performed.
作为本发明进一步的方案:根据牛顿第二定律,所述二自由度车辆模型具体为:As a further solution of the present invention: according to Newton's second law, the two-degree-of-freedom vehicle model is specifically:
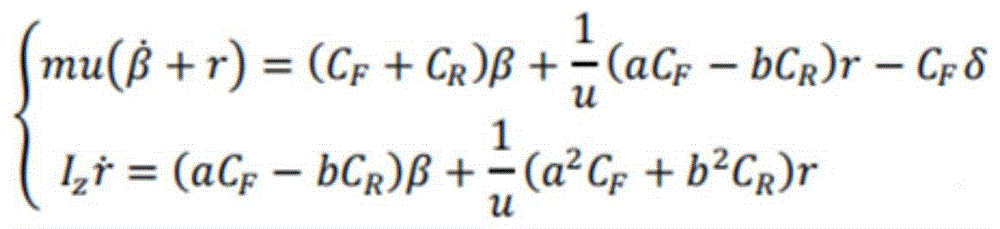
其中,a,b为质心到前后轴距离,CF,CR为前后轴侧偏刚度,m,IZ为车身质量和绕Z轴转动惯量,β,γ,δ,u分别为质心侧偏角,横摆角速度,前轮转角,纵向车速,侧向车速;Among them, a, b are the distance from the center of mass to the front and rear axles, C F , C R are the cornering stiffness of the front and rear axles, m, I Z are the body mass and the moment of inertia around the Z axis, β, γ, δ, u are the center of mass side deflection, respectively angle, yaw rate, front wheel angle, longitudinal speed, lateral speed;
赛车稳定时,所有导数项均为零,可得:When the car is stable, all derivative terms are zero, and we get:

其中,in,

作为本发明再进一步的方案:选取滑模面为实际横摆角速度γ和目标横摆角速度γd的差值,实际侧偏角βd和目标侧偏角βd的差值,其中c为常数,As a further scheme of the present invention: the sliding mode surface is selected as the difference between the actual yaw rate γ and the target yaw rate γ d , the difference between the actual side slip angle β d and the target side slip angle β d , where c is a constant ,
s=(γ-γd)+c(β-βd)s=(γ-γ d )+c(β-β d )
进入滑模面后:
即:
作为本发明再进一步的方案:赛车的横摆运动方程式为:As a further scheme of the present invention: the yaw motion equation of the racing car is:

化简得:
其中,由于整车所需的横摆力矩可由四个车轮提供,即:Among them, since the yaw moment required by the whole vehicle can be provided by four wheels, namely:

将Mz带入,则:Bring M z into, then:

作为本发明再进一步的方案:当s′=0时,也即

作为本发明再进一步的方案:在滑模变结构控制中,控制系统的输入写成Mz=Meq+Mvs,其中Meq为系统在没有任何外界因素影响时得滑模面得控制量,Mvss为系统在有各种外界干扰作用下系统得控制量;为使系统能快速稳定得趋近滑模面,此控制系统以按指数规律趋近得趋近控制规律趋近滑模面,即:As a further solution of the present invention: in the sliding mode variable structure control, the input of the control system is written as M z =M eq +M vs , where M eq is the control quantity of the sliding mode surface obtained by the system when there is no external factor influence, M vss is the control quantity of the system under the action of various external disturbances; in order to make the system approach the sliding mode surface quickly and stably, the control system approaches the sliding mode surface according to the exponential law, which approaches the control law. which is:
s′=-ξsgn(s)-ks,其中ξ>0,k>0。s'=-ξsgn(s)-ks, where ξ>0, k>0.
作为本发明再进一步的方案:切换控制函数为:As a further scheme of the present invention: the switching control function is:
Mvss=Mz-Meq=Iz(-ξsgn(s)-ks)M vss =M z -M eq =I z (-ξsgn(s)-ks)
则横摆力矩输出为:Then the yaw moment output is:

作为本发明再进一步的方案:根据:As a further scheme of the present invention: according to:

计算出得到目标横摆角速度度所需要的左右轮力矩偏差,其中tf,tr,a分别是前后轮距和质心到前轴距离,R是车轮半径。Calculate the left and right wheel moment deviation required to obtain the target yaw rate, where t f , tr , a are the distance between the front and rear wheelbase and the center of mass to the front axle, respectively, and R is the wheel radius.
作为本发明再进一步的方案:力矩分配式为:As a further scheme of the present invention: the torque distribution formula is:


与现有技术相比,本发明的有益效果是:Compared with the prior art, the beneficial effects of the present invention are:
1、本发明提出了一种基于滑膜控制的四电机驱动FSAE赛车转矩控制电子差速算法,不仅控制了转向时内外轮转矩输出使得车辆转向稳定性提高,还通过调配各轮的转矩,控制车辆的横摆力矩向稳定方向靠近,提高了赛车的极限。1. The present invention proposes a four-motor drive FSAE racing car torque control electronic differential algorithm based on sliding film control, which not only controls the torque output of the inner and outer wheels during steering to improve the steering stability of the vehicle, but also adjusts the rotation of each wheel. The yaw moment of the vehicle is controlled to approach the stable direction, which improves the limit of the racing car.
2、本发明的滑模控制具有快速相应,对应参数变化及扰动不灵敏,无需系统在线辨识,物理实现简单等优点,对于车辆这种高度非线性的物体所构建的控制器可以有效减少传感器干扰带来的影响,控制具有良好应用价值。2. The sliding mode control of the present invention has the advantages of fast response, insensitive to parameter changes and disturbances, no need for online identification of the system, simple physical implementation, etc. The controller constructed for a highly nonlinear object such as a vehicle can effectively reduce sensor interference Influence, control has good application value.
3、本发明实现的电子差速算法能有效提高四电机驱动FSAE赛车在转向工况下的稳定性和转向极限性能。3. The electronic differential algorithm realized by the present invention can effectively improve the stability and steering limit performance of the four-motor-driven FSAE racing car under steering conditions.
附图说明Description of drawings
图1为一种基于滑模控制的四电机驱动FSAE赛车电子差速算法的流程图。Figure 1 is a flow chart of a four-motor drive FSAE racing electronic differential algorithm based on sliding mode control.
图2为一种基于滑模控制的四电机驱动FSAE赛车电子差速算法中横摆角速度的曲线图。Figure 2 is a graph of the yaw rate in a four-motor-driven FSAE racing electronic differential algorithm based on sliding mode control.
图3为一种基于滑模控制的四电机驱动FSAE赛车电子差速算法中质心侧偏角的曲线图。Figure 3 is a graph of the center of mass slip angle in a four-motor drive FSAE racing electronic differential algorithm based on sliding mode control.
图4为一种基于滑模控制的四电机驱动FSAE赛车电子差速算法中侧向加速度的曲线图。Figure 4 is a graph of lateral acceleration in a four-motor drive FSAE racing electronic differential algorithm based on sliding mode control.
具体实施方式Detailed ways
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。The technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, but not all of the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative efforts shall fall within the protection scope of the present invention.
请参阅图1~4,本发明实施例中,一种基于滑模控制的四电机驱动FSAE赛车电子差速算法,包括以下步骤:构建二自由度车辆模型,根据二自由度车辆模型和车辆传感器数据,计算理想横摆角速度;构建滑模变控器,通过滑模变控器,计算出所需横摆力矩;构建转矩分配算法,计算各所需轮分配的转矩,进行转矩分配。Referring to FIGS. 1 to 4 , in an embodiment of the present invention, a four-motor-driven FSAE racing electronic differential algorithm based on sliding mode control includes the following steps: constructing a two-degree-of-freedom vehicle model, according to the two-degree-of-freedom vehicle model and vehicle sensors. Data, calculate the ideal yaw angular velocity; build a sliding mode controller, through the sliding mode controller, calculate the required yaw moment; build a torque distribution algorithm, calculate the torque distributed by each required wheel, and perform torque distribution .
根据牛顿第二定律,所述二自由度车辆模型具体为:According to Newton's second law, the two-degree-of-freedom vehicle model is specifically:

其中,a,b为质心到前后轴距离,CF,CR为前后轴侧偏刚度,m,IZ为车身质量和绕Z轴转动惯量,β,γ,δ,u分别为质心侧偏角,横摆角速度,前轮转角,纵向车速,侧向车速;Among them, a, b are the distance from the center of mass to the front and rear axles, C F , C R are the cornering stiffness of the front and rear axles, m, I Z are the body mass and the moment of inertia around the Z axis, β, γ, δ, u are the center of mass side deflection, respectively angle, yaw rate, front wheel angle, longitudinal speed, lateral speed;
赛车稳定时,所有导数项均为零,可得:When the car is stable, all derivative terms are zero, and we get:

其中,in,

选取滑模面为实际横摆角速度γ和目标横摆角速度γd的差值,实际侧偏角βd和目标侧偏角βd的差值,其中c为常数,The sliding surface is selected as the difference between the actual yaw rate γ and the target yaw rate γ d , the difference between the actual side slip angle β d and the target side slip angle β d , where c is a constant,
s=(γ-γd)+c(β-βd)s=(γ-γ d )+c(β-β d )
进入滑模面后:
即:
赛车的横摆运动方程式为:The yaw motion equation of the car is:

化简得:
其中,由于整车所需的横摆力矩可由四个车轮提供,即:Among them, since the yaw moment required by the whole vehicle can be provided by four wheels, namely:

将Mz带入,则:Bring M z into, then:

当s′=0时,也即

在滑模变结构控制中,控制系统的输入写成Mz=Meq+Mvss,其中Meq为系统在没有任何外界因素影响时得滑模面得控制量,Mvss为系统在有各种外界干扰作用下系统得控制量;为使系统能快速稳定得趋近滑模面,此控制系统以按指数规律趋近得趋近控制规律趋近滑模面,即:In the sliding mode variable structure control, the input of the control system is written as M z = M eq + M vss , where M eq is the control quantity of the sliding mode surface when the system is not affected by any external factors, and M vss is the system when there are various The control quantity of the system under the action of external disturbance; in order to make the system approach the sliding mode surface quickly and stably, the control system approaches the sliding mode surface according to the exponential law approaching the control law, namely:
s′=-ξsgn(s)-ks,其中ξ>0,k>0。s'=-ξsgn(s)-ks, where ξ>0, k>0.
切换控制函数为:The switching control function is:
Mvss=Mz-Meq=Iz(-ξsgn(s)-ks)M vss =M z -M eq =I z (-ξsgn(s)-ks)
则横摆力矩输出为:Then the yaw moment output is:

根据:according to:

计算出得到目标横摆角速度度所需要的左右轮力矩偏差,其中tf,tr,a分别是前后轮距和质心到前轴距离,R是车轮半径。Calculate the left and right wheel moment deviation required to obtain the target yaw rate, where t f , tr , a are the distance between the front and rear wheelbase and the center of mass to the front axle, respectively, and R is the wheel radius.
力矩分配式为:The torque distribution formula is:


最后通过carsim/simulink联合仿真表明,本发明提出的转矩控制的电子差速方法能提高赛车的侧向极限,减少转向时的质心侧偏角和横摆角速度,提高侧向稳定性,对四电机驱动赛车的侧向控制有实践价值。Finally, the joint simulation of carsim/simulink shows that the electronic differential method of torque control proposed by the present invention can improve the lateral limit of the racing car, reduce the side slip angle and yaw angular velocity of the center of mass during steering, and improve the lateral stability. The lateral control of motor-driven racing cars has practical value.
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。The above description is only a preferred embodiment of the present invention, but the protection scope of the present invention is not limited to this. The equivalent replacement or change of the inventive concept thereof shall be included within the protection scope of the present invention.
Claims (9)















Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110795698.0A CN113353061A (en) | 2021-07-14 | 2021-07-14 | Four-motor-driven FSAE racing car electronic differential algorithm based on sliding mode control |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110795698.0A CN113353061A (en) | 2021-07-14 | 2021-07-14 | Four-motor-driven FSAE racing car electronic differential algorithm based on sliding mode control |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN113353061A true CN113353061A (en) | 2021-09-07 |
Family
ID=77539425
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202110795698.0A Pending CN113353061A (en) | 2021-07-14 | 2021-07-14 | Four-motor-driven FSAE racing car electronic differential algorithm based on sliding mode control |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN113353061A (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114312749A (en) * | 2021-11-24 | 2022-04-12 | 中国煤炭科工集团太原研究院有限公司 | Anti-skid yaw torque control method and device for multi-point independent wheel side driving mining vehicle |
| CN114734834A (en) * | 2022-05-05 | 2022-07-12 | 安徽理工大学环境友好材料与职业健康研究院(芜湖) | Electronic differential control system for double motors of rear axle of electric vehicle |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20040059491A1 (en) * | 2002-09-24 | 2004-03-25 | Takeshi Yoneda | Differential limiting control apparatus for a vehicle and the method thereof |
| CN107139775A (en) * | 2017-04-26 | 2017-09-08 | 江苏大学 | A kind of electric car direct yaw moment control method based on Non-smooth surface technology |
| CN108694283A (en) * | 2018-05-15 | 2018-10-23 | 北京理工大学 | A kind of forecast Control Algorithm and system for improving electric vehicle lateral stability |
| CN109733205A (en) * | 2018-12-10 | 2019-05-10 | 江苏大学 | A direct yaw moment control method for in-wheel electric vehicles with fault-tolerant function |
| CN109849899A (en) * | 2019-02-01 | 2019-06-07 | 江苏大学 | A kind of electric-hydraulic combined vehicle body stabilizing control system of electric wheel truck and method |
| CN110239621A (en) * | 2019-06-17 | 2019-09-17 | 北京理工大学 | A distributed electric vehicle yaw stability control method and system |
| CN110422053A (en) * | 2019-07-26 | 2019-11-08 | 吉林大学 | Four-wheel hub motor driven electric vehicle energy-saving control method |
| CN110979303A (en) * | 2019-12-24 | 2020-04-10 | 大连理工大学 | Method for deciding additional yaw moment of running vehicle |
| CN111959288A (en) * | 2020-07-02 | 2020-11-20 | 武汉理工大学 | Vehicle yaw moment control method, system, device and storage medium |
| CN112668095A (en) * | 2020-12-22 | 2021-04-16 | 安徽卡思普智能科技有限公司 | Design method of active front wheel steering controller |
| CN113002528A (en) * | 2021-03-29 | 2021-06-22 | 北京理工大学 | Four-wheel hub motor driven electric vehicle stability coordination control method and system |
-
2021
- 2021-07-14 CN CN202110795698.0A patent/CN113353061A/en active Pending
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20040059491A1 (en) * | 2002-09-24 | 2004-03-25 | Takeshi Yoneda | Differential limiting control apparatus for a vehicle and the method thereof |
| CN107139775A (en) * | 2017-04-26 | 2017-09-08 | 江苏大学 | A kind of electric car direct yaw moment control method based on Non-smooth surface technology |
| CN108694283A (en) * | 2018-05-15 | 2018-10-23 | 北京理工大学 | A kind of forecast Control Algorithm and system for improving electric vehicle lateral stability |
| CN109733205A (en) * | 2018-12-10 | 2019-05-10 | 江苏大学 | A direct yaw moment control method for in-wheel electric vehicles with fault-tolerant function |
| CN109849899A (en) * | 2019-02-01 | 2019-06-07 | 江苏大学 | A kind of electric-hydraulic combined vehicle body stabilizing control system of electric wheel truck and method |
| CN110239621A (en) * | 2019-06-17 | 2019-09-17 | 北京理工大学 | A distributed electric vehicle yaw stability control method and system |
| CN110422053A (en) * | 2019-07-26 | 2019-11-08 | 吉林大学 | Four-wheel hub motor driven electric vehicle energy-saving control method |
| CN110979303A (en) * | 2019-12-24 | 2020-04-10 | 大连理工大学 | Method for deciding additional yaw moment of running vehicle |
| CN111959288A (en) * | 2020-07-02 | 2020-11-20 | 武汉理工大学 | Vehicle yaw moment control method, system, device and storage medium |
| CN112668095A (en) * | 2020-12-22 | 2021-04-16 | 安徽卡思普智能科技有限公司 | Design method of active front wheel steering controller |
| CN113002528A (en) * | 2021-03-29 | 2021-06-22 | 北京理工大学 | Four-wheel hub motor driven electric vehicle stability coordination control method and system |
Non-Patent Citations (1)
| Title |
|---|
| 廖响荣: "《分布式驱动车辆横摆稳定性模糊滑模控制》", 宜宾学院学报, vol. 20, no. 12, pages 27 - 30 * |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114312749A (en) * | 2021-11-24 | 2022-04-12 | 中国煤炭科工集团太原研究院有限公司 | Anti-skid yaw torque control method and device for multi-point independent wheel side driving mining vehicle |
| CN114312749B (en) * | 2021-11-24 | 2024-05-07 | 中国煤炭科工集团太原研究院有限公司 | Multi-point independent wheel edge driving mining vehicle anti-skid yaw torque control method and equipment |
| CN114734834A (en) * | 2022-05-05 | 2022-07-12 | 安徽理工大学环境友好材料与职业健康研究院(芜湖) | Electronic differential control system for double motors of rear axle of electric vehicle |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN104443022B (en) | A kind of four motorized wheels electric car stability control method and system | |
| CN111746633B (en) | Vehicle distributed steering driving system control method based on reinforcement learning | |
| Genta et al. | The automotive chassis: vol. 2: system design | |
| CN103057436B (en) | Yawing moment control method of individual driven electromobile based on multi-agent | |
| CN106882080B (en) | Differential steering system and adaptive neural network fault-tolerant control method thereof | |
| CN107215329B (en) | A distributed drive electric vehicle lateral stability control method based on ATSM | |
| CN110962626B (en) | Self-adaptive electronic differential control method for multi-shaft hub motor driven vehicle | |
| CN106218715A (en) | A kind of control method of four-wheel independent steering vehicle | |
| CN103786602A (en) | Maneuverability improving and controlling method based on distributively driven electric vehicle | |
| CN104477237A (en) | Four wheel independent steering electric car steering control method and system | |
| CN206537164U (en) | A kind of differential steering system | |
| CN111546907B (en) | Wheel speed distribution method for four-wheel steering hub motor driven vehicle | |
| Irie et al. | 4WS technology and the prospects for improvement of vehicle dynamics | |
| CN111547111B (en) | Autonomous guiding control method for virtual rail train | |
| CN107499378A (en) | Four-wheel independent steering electric vehicle four-wheel steering front/rear wheel turns to dynamic switching method | |
| CN113353061A (en) | Four-motor-driven FSAE racing car electronic differential algorithm based on sliding mode control | |
| CN114801781A (en) | Fuzzy-sliding mode composite control system of four-wheel drive AFS/DYC integrated control system | |
| CN114734983A (en) | Distributed electric vehicle stability control method based on stable domain | |
| CN115848162B (en) | Control method for six-wheel independent electrically-driven unmanned vehicle differential steering | |
| CN113335376A (en) | Differential anti-drag control method between wheels during steering of distributed independent drive electric automobile | |
| CN110371106B (en) | Steering stability method based on four-wheel independent drive electric automobile | |
| CN113147736A (en) | Electric vehicle stability control method based on independent gear train | |
| CN108839656B (en) | Method for Determining Driving Moment of Multi-axis Distributed Drive Articulated Bus | |
| CN117622125A (en) | Path tracking control method based on differential steering | |
| CN114194035B (en) | Balanced arm type six-wheel independent drive intelligent chassis torque distribution method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| WD01 | Invention patent application deemed withdrawn after publication |
Application publication date: 20210907 |
|
| WD01 | Invention patent application deemed withdrawn after publication |