CN113305132B - 基于Paddle框架的生活垃圾分拣机器人 - Google Patents
基于Paddle框架的生活垃圾分拣机器人 Download PDFInfo
- Publication number
- CN113305132B CN113305132B CN202110600111.6A CN202110600111A CN113305132B CN 113305132 B CN113305132 B CN 113305132B CN 202110600111 A CN202110600111 A CN 202110600111A CN 113305132 B CN113305132 B CN 113305132B
- Authority
- CN
- China
- Prior art keywords
- box body
- box
- rotating shaft
- garbage
- rectangular array
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000010813 municipal solid waste Substances 0.000 title claims abstract description 66
- 238000000926 separation method Methods 0.000 claims abstract description 24
- 239000007788 liquid Substances 0.000 claims abstract description 15
- 238000003756 stirring Methods 0.000 claims abstract description 8
- 239000000523 sample Substances 0.000 claims description 11
- 239000011148 porous material Substances 0.000 claims description 6
- 238000012216 screening Methods 0.000 claims description 4
- 239000010791 domestic waste Substances 0.000 claims 1
- 230000033001 locomotion Effects 0.000 abstract description 19
- 230000018044 dehydration Effects 0.000 abstract description 7
- 238000006297 dehydration reaction Methods 0.000 abstract description 7
- 238000000034 method Methods 0.000 abstract description 7
- 230000017525 heat dissipation Effects 0.000 abstract description 6
- 238000001179 sorption measurement Methods 0.000 abstract description 3
- 239000012530 fluid Substances 0.000 description 3
- 238000003466 welding Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000002745 absorbent Effects 0.000 description 1
- 239000002250 absorbent Substances 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 239000000779 smoke Substances 0.000 description 1
- 239000002699 waste material Substances 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B09—DISPOSAL OF SOLID WASTE; RECLAMATION OF CONTAMINATED SOIL
- B09B—DISPOSAL OF SOLID WASTE NOT OTHERWISE PROVIDED FOR
- B09B3/00—Destroying solid waste or transforming solid waste into something useful or harmless
- B09B3/80—Destroying solid waste or transforming solid waste into something useful or harmless involving an extraction step
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B69/00—Unpacking of articles or materials, not otherwise provided for
- B65B69/0033—Unpacking of articles or materials, not otherwise provided for by cutting
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K5/00—Casings; Enclosures; Supports
- H02K5/04—Casings or enclosures characterised by the shape, form or construction thereof
- H02K5/20—Casings or enclosures characterised by the shape, form or construction thereof with channels or ducts for flow of cooling medium
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Mechanical Engineering (AREA)
- Environmental & Geological Engineering (AREA)
- Combined Means For Separation Of Solids (AREA)
Abstract
本发明提供基于Paddle框架的生活垃圾分拣机器人,涉及环保机器人技术领域,解决了不能够通过结构上的改进在实现垃圾高效震动式固液分离的同时联动实现垃圾与垃圾袋的分离;不能够通过结构上的改进在实现塑料袋单独分拣的同时同步实现塑料袋吸附结构上电动机的辅助散热的问题。基于Paddle框架的生活垃圾分拣机器人,包括箱体;所述箱体为矩形箱状结构。因齿轮B与齿轮A啮合;转轴B转动连接在箱体上,且转轴B上安装有拨动块B;拨动块B与放置板弹性接触,且拨动块B转动时还与筛孔接触,从而通过转轴B的转动可实现放置板的往复运动以及往复运动过程中的震动,进而实现了放置板上垃圾的高效脱水以及脱水后垃圾的高效滑落。
Description
技术领域
本发明属于环保机器人技术领域,更具体地说,特别涉及基于Paddle框架的生活垃圾分拣机器人。
背景技术
Paddle框架属于无线控制体系;垃圾分拣的工作气味太大,很少有人愿意去做,且目前居民在投放垃圾时一般都将垃圾通过垃圾塑料袋装起来,而后投放到垃圾桶内;然而垃圾袋分解难度较大,故需要一种能够实现垃圾与垃圾袋分离的分拣机器人来实现。
如申请号:CN201710690186.1,本发明公开了一种分拣生活垃圾的机器人,包括主体,主体底面下方设有转动盘转动盘底面安装有车轮装置,主体两侧安装有可回收垃圾收集箱体装置和不可回收垃圾收集箱体装置,垃圾收集箱体的一侧与其相邻两侧通过电磁铁连接,主体前面装有分拣装置,分拣装置由电机一、转轴一、电机二、转轴二、电机三、转轴三、分拣头装置共同构成,主体顶部上表面中心处安装有视觉传感器,主体上安装有烟雾传感器,主体侧面安装有位移传感器,主体装有控制器。本发明的有益效果是,结构简单,实用性强。
类似于上述申请的垃圾分拣机器人目前还存在以下几点不足:
一个是,现有装置仅仅能够实现垃圾的固液分离,难以实现垃圾与垃圾袋的分离,不能够通过结构上的改进在实现垃圾高效震动式固液分离的同时联动实现垃圾与垃圾袋的分离;再者是,现有装置不能够通过结构上的改进在实现塑料袋单独分拣的同时同步实现塑料袋吸附结构上电动机的辅助散热。
于是,有鉴于此,针对现有的结构及缺失予以研究改良,提供基于Paddle框架的生活垃圾分拣机器人,以期达到更具有更加实用价值性的目的。
发明内容
为了解决上述技术问题,本发明提供基于Paddle框架的生活垃圾分拣机器人,以解决现有一个是,现有装置仅仅能够实现垃圾的固液分离,难以实现垃圾与垃圾袋的分离,不能够通过结构上的改进在实现垃圾高效震动式固液分离的同时联动实现垃圾与垃圾袋的分离;再者是,现有装置不能够通过结构上的改进在实现塑料袋单独分拣的同时同步实现塑料袋吸附结构上电动机的辅助散热的问题。
本发明基于Paddle框架的生活垃圾分拣机器人的目的与功效,由以下具体技术手段所达成:
基于Paddle框架的生活垃圾分拣机器人,包括箱体;
所述箱体为矩形箱状结构;
切割结构,所述切割结构安装在箱体上;
分离结构,所述分离结构安装在箱体上;
吸气扇,所述吸气扇安装在箱体上;
程控盒,所述程控盒安装在箱体上。
进一步的,所述推送结构还包括:
受力座,受力座焊接在安装板上,且当转轴A转动时拨动块A与受力座弹性接触。
进一步的,所述推送结构还包括:
通孔B,通孔B呈矩形阵列状开设在安装板上,且通孔B为锥形孔状结构,并且矩形阵列状开设的通孔B与吸气扇对正。
进一步的,所述箱体还包括:
探头,探头共设有五个,且五个探头呈矩形阵列状安装在箱体的进料口处;探头与程控盒电性相连,且程控盒还与驱动电机电性相连,并且程控盒内还安装有与Paddle框架相连接的4G模块。
进一步的,所述箱体包括:
液体收集盒,液体收集盒安装在箱体上;
垃圾收集盒,垃圾收集盒安装在箱体上;
盖板,盖板插接在箱体上;
通孔A,通孔A呈矩形阵列状开设在箱体上,且通孔A与吸气扇对正。
进一步的,所述切割结构包括:
转轴A,转轴A转动连接在箱体上,且转轴A上呈矩形阵列状安装有切割片,并且转轴A上还安装有拨动块A;
驱动电机,驱动电机通过螺栓固定连接在箱体上,且驱动电机的转动轴与转轴A相连接。
进一步的,所述分离结构包括:
放置板,放置板转动连接在箱体上;
筛孔,筛孔呈矩形阵列状开设在放置板,且矩形阵列状开设的筛孔共同组成了垃圾中液体的筛选结构;筛孔与下方的液体收集盒位置对正,且筛孔还与上方的切割片的对正。
进一步的,所述分离结构还包括:
转轴B,转轴B转动连接在箱体上,且转轴B上安装有拨动块B;拨动块B与放置板弹性接触,且拨动块B转动时还与筛孔接触。
进一步的,所述切割结构还包括:
齿轮A,齿轮A安装在转轴A上;
分离结构还包括:
齿轮B,齿轮B安装在转轴B上,且齿轮B与齿轮A啮合;
切割结构的上方位置安装有推送结构,且推送结构安装在箱体上。
进一步的,所述推送结构包括:
滑动座,滑动座焊接在箱体上,且滑动座上滑动连接有两根滑动杆;两根滑动杆均为阶梯轴状结构,且两根滑动杆上焊接有安装板;
弹性件,弹性件共设有两个,且两个弹性件分别套接在两根滑动杆上,并且两个弹性件共同组成了滑动杆以及安装板的弹性复位结构;
推送头,推送头通过连接杆焊接在安装板上,且推送头为梯形块状结构;推送头顶端面与箱体内壁顶端面接触,且推送头与通孔A位置对正;
箱体还包括:
挡板,挡板焊接在箱体内部,且挡板上呈矩形阵列状焊接有倒刺。
与现有技术相比,本发明具有如下有益效果:
通过切割结构和分离结构的配合设置,第一,因齿轮B与齿轮A啮合;转轴B转动连接在箱体上,且转轴B上安装有拨动块B;拨动块B与放置板弹性接触,且拨动块B转动时还与筛孔接触,从而通过转轴B的转动可实现放置板的往复运动以及往复运动过程中的震动,进而实现了放置板上垃圾的高效脱水以及脱水后垃圾的高效滑落。
通过切割结构和推送结构的配合设置,第一,因受力座焊接在安装板上,且当转轴A转动时拨动块A与受力座弹性接触;推送头通过连接杆焊接在安装板上,且推送头为梯形块状结构;推送头顶端面与箱体内壁顶端面接触,且推送头与通孔A位置对正,从而实现了受力座以及推送头的往复运动,进而实现了塑料袋的单独分拣收集;
第二,因通孔B呈矩形阵列状开设在安装板上,且通孔B为锥形孔状结构,并且矩形阵列状开设的通孔B与吸气扇对正,从而当安装板往复运动过程中通孔B处产生的气流可实现吸气扇上电动机的辅助散热。
附图说明
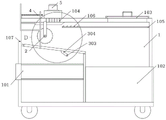
图1是本发明的轴视结构示意图。
图2是本发明箱体剖开后的轴视结构示意图。
图3是本发明图2的A处放大结构示意图。
图4是本发明图2的B处放大结构示意图。
图5是本发明图2的主视结构示意图。
图6是本发明图5的C处放大结构示意图。
图7是本发明图5的右视结构示意图。
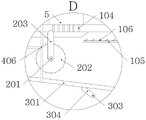
图8是本发明图7的D处放大结构示意图。
图中,部件名称与附图编号的对应关系为:
1、箱体;101、液体收集盒;102、垃圾收集盒;103、盖板;104、通孔A;105、挡板;106、倒刺;107、探头;2、切割结构;201、转轴A;202、切割片;203、拨动块A;204、齿轮A;205、驱动电机;3、分离结构;301、放置板;302、筛孔;303、转轴B;304、拨动块B;305、齿轮B;4、推送结构;401、滑动座;402、滑动杆;403、安装板;404、弹性件;405、推送头;406、受力座;407、通孔B;5、吸气扇;6、程控盒。
具体实施方式
下面结合附图和实施例对本发明的实施方式作进一步详细描述。以下实施例用于说明本发明,但不能用来限制本发明的范围。
在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上;术语“上”、“下”、“左”、“右”、“内”、“外”、“前端”、“后端”、“头部”、“尾部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
实施例:
如附图1至附图8所示:
本发明提供基于Paddle框架的生活垃圾分拣机器人,包括箱体1;
箱体1为矩形箱状结构;
切割结构2,切割结构2安装在箱体1上;
分离结构3,分离结构3安装在箱体1上;
吸气扇5,吸气扇5安装在箱体1上;
程控盒6,程控盒6安装在箱体1上。
参考如图7和图8,箱体1包括:
液体收集盒101,液体收集盒101安装在箱体1上;
垃圾收集盒102,垃圾收集盒102安装在箱体1上;
盖板103,盖板103插接在箱体1上;
通孔A104,通孔A104呈矩形阵列状开设在箱体1上,且通孔A104与吸气扇5对正,从而当吸气扇5转动时通过通孔A104处的吸力可实现塑料袋的吸附。
参考如图2,切割结构2包括:
转轴A201,转轴A201转动连接在箱体1上,且转轴A201上呈矩形阵列状安装有切割片202,并且转轴A201上还安装有拨动块A203;
驱动电机205,驱动电机205通过螺栓固定连接在箱体1上,且驱动电机205的转动轴与转轴A201相连接,从而当驱动电机205转动时切割片202呈切割状。
参考如图2,分离结构3包括:
放置板301,放置板301转动连接在箱体1上;
筛孔302,筛孔302呈矩形阵列状开设在放置板301,且矩形阵列状开设的筛孔302共同组成了垃圾中液体的筛选结构;筛孔302与下方的液体收集盒101位置对正,且筛孔302还与上方的切割片202的对正,从而当垃圾袋被切割片202切开后垃圾袋内的液体可通过筛孔302处流至液体收集盒101内进行收集。
参考如图7和图8,分离结构3还包括:
转轴B303,转轴B303转动连接在箱体1上,且转轴B303上安装有拨动块B304;拨动块B304与放置板301弹性接触,且拨动块B304转动时还与筛孔302接触,从而通过转轴B303的转动可实现放置板301的往复运动以及往复运动过程中的震动,进而实现了放置板301上垃圾的高效脱水以及脱水后垃圾的高效滑落。
参考如图2,切割结构2还包括:
齿轮A204,齿轮A204安装在转轴A201上;
分离结构3还包括:
齿轮B305,齿轮B305安装在转轴B303上,且齿轮B305与齿轮A204啮合,从而当切割片202转动切割时放置板301呈往复运动状;
切割结构2的上方位置安装有推送结构4,且推送结构4安装在箱体1上。
参考如图7和图8,推送结构4包括:
滑动座401,滑动座401焊接在箱体1上,且滑动座401上滑动连接有两根滑动杆402;两根滑动杆402均为阶梯轴状结构,且两根滑动杆402上焊接有安装板403;
弹性件404,弹性件404共设有两个,且两个弹性件404分别套接在两根滑动杆402上,并且两个弹性件404共同组成了滑动杆402以及安装板403的弹性复位结构;
推送头405,推送头405通过连接杆焊接在安装板403上,且推送头405为梯形块状结构;推送头405顶端面与箱体1内壁顶端面接触,且推送头405与通孔A104位置对正;
箱体1还包括:
挡板105,挡板105焊接在箱体1内部,且挡板105上呈矩形阵列状焊接有倒刺106,从而当推送头405往复运动时通过推送头405可将通孔A104处吸附的塑料袋推送至挡板105上方,进而通过倒刺106可将塑料袋留在挡板105的上方进行收集。
参考如图2和图7,推送结构4还包括:
受力座406,受力座406焊接在安装板403上,且当转轴A201转动时拨动块A203与受力座406弹性接触,从而实现了受力座406以及推送头405的往复运动,进而实现了塑料袋的单独分拣收集。
参考如图2和图4,推送结构4还包括:
通孔B407,通孔B407呈矩形阵列状开设在安装板403上,且通孔B407为锥形孔状结构,并且矩形阵列状开设的通孔B407与吸气扇5对正,从而当安装板403往复运动过程中通孔B407处产生的气流可实现吸气扇5上电动机的辅助散热。
参考如图2和图5,箱体1还包括:
探头107,探头107共设有五个,且五个探头107呈矩形阵列状安装在箱体1的进料口处;探头107与程控盒6电性相连,且程控盒6还与驱动电机205电性相连,并且程控盒6内还安装有与Paddle框架相连接的4G模块,从而当探头107检测到垃圾时可控制驱动电机205进行转动,且通过4G模块还可实现与Paddle框架系统的信息传递。
在另一实施例中,放置板301上可焊接一个凹形结构的挡座,从而可防止垃圾中的水分流走。
本实施例的具体使用方式与作用:
当驱动电机205转动时,第一,可实现切割片202的转动,进而实现了垃圾塑料袋的切开;第二,因齿轮B305与齿轮A204啮合;转轴B303转动连接在箱体1上,且转轴B303上安装有拨动块B304;拨动块B304与放置板301弹性接触,且拨动块B304转动时还与筛孔302接触,从而通过转轴B303的转动可实现放置板301的往复运动以及往复运动过程中的震动,进而实现了放置板301上垃圾的高效脱水以及脱水后垃圾的高效滑落;第三,因受力座406焊接在安装板403上,且当转轴A201转动时拨动块A203与受力座406弹性接触;推送头405通过连接杆焊接在安装板403上,且推送头405为梯形块状结构;推送头405顶端面与箱体1内壁顶端面接触,且推送头405与通孔A104位置对正,从而实现了受力座406以及推送头405的往复运动,进而实现了塑料袋的单独分拣收集;第四,因通孔B407呈矩形阵列状开设在安装板403上,且通孔B407为锥形孔状结构,并且矩形阵列状开设的通孔B407与吸气扇5对正,从而当安装板403往复运动过程中通孔B407处产生的气流可实现吸气扇5上电动机的辅助散热;
在Paddle框架控制时,因探头107与程控盒6电性相连,且程控盒6还与驱动电机205电性相连,并且程控盒6内还安装有与Paddle框架相连接的4G模块,从而当探头107检测到垃圾时可控制驱动电机205进行转动,且通过4G模块还可实现与Paddle框架系统的信息传递。
本发明的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本发明限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本发明的原理和实际应用,并且使本领域的普通技术人员能够理解本发明从而设计适于特定用途的带有各种修改的各种实施例。
Claims (5)
1.基于Paddle框架的生活垃圾分拣机器人,其特征在于:包括箱体;
所述箱体为矩形箱状结构;
切割结构,所述切割结构安装在箱体上;
所述切割结构包括:
转轴A,转轴A转动连接在箱体上,且转轴A上呈矩形阵列状安装有切割片,并且转轴A上还安装有拨动块A;
驱动电机,驱动电机通过螺栓固定连接在箱体上,且驱动电机的转动轴与转轴A相连接;
所述切割结构还包括:
齿轮A,齿轮A安装在转轴A上;
分离结构还包括:
齿轮B,齿轮B安装在转轴B上,且齿轮B与齿轮A啮合;
切割结构的上方位置安装有推送结构,且推送结构安装在箱体上;
所述推送结构包括:
滑动座,滑动座焊接在箱体上,且滑动座上滑动连接有两根滑动杆;两根滑动杆均为阶梯轴状结构,且两根滑动杆上焊接有安装板;
弹性件,弹性件共设有两个,且两个弹性件分别套接在两根滑动杆上,并且两个弹性件共同组成了滑动杆以及安装板的弹性复位结构;
推送头,推送头通过连接杆焊接在安装板上,且推送头为梯形块状结构;推送头顶端面与箱体内壁顶端面接触,且推送头与通孔A位置对正;
箱体还包括:
挡板,挡板焊接在箱体内部,且挡板上呈矩形阵列状焊接有倒刺;
所述推送结构还包括:
受力座,受力座焊接在安装板上,且当转轴A转动时拨动块A与受力座弹性接触;
所述推送结构还包括:
通孔B,通孔B呈矩形阵列状开设在安装板上,且通孔B为锥形孔状结构,并且矩形阵列状开设的通孔B与吸气扇对正;
分离结构,所述分离结构安装在箱体上;
吸气扇,所述吸气扇安装在箱体上;
程控盒,所述程控盒安装在箱体上。
2.如权利要求1所述基于Paddle框架的生活垃圾分拣机器人,其特征在于:所述箱体包括:
液体收集盒,液体收集盒安装在箱体上;
垃圾收集盒,垃圾收集盒安装在箱体上;
盖板,盖板插接在箱体上;
通孔A,通孔A呈矩形阵列状开设在箱体上,且通孔A与吸气扇对正。
3.如权利要求1所述基于Paddle框架的生活垃圾分拣机器人,其特征在于:所述分离结构包括:
放置板,放置板转动连接在箱体上;
筛孔,筛孔呈矩形阵列状开设在放置板,且矩形阵列状开设的筛孔共同组成了垃圾中液体的筛选结构;筛孔与下方的液体收集盒位置对正,且筛孔还与上方的切割片的对正。
4.如权利要求1所述基于Paddle框架的生活垃圾分拣机器人,其特征在于:所述分离结构还包括:
转轴B,转轴B转动连接在箱体上,且转轴B上安装有拨动块B;拨动块B与放置板弹性接触,且拨动块B转动时还与筛孔接触。
5.如权利要求1所述基于Paddle框架的生活垃圾分拣机器人,其特征在于:所述箱体还包括:
探头,探头共设有五个,且五个探头呈矩形阵列状安装在箱体的进料口处;探头与程控盒电性相连,且程控盒还与驱动电机电性相连,并且程控盒内还安装有与Paddle框架相连接的4G模块。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110600111.6A CN113305132B (zh) | 2021-05-31 | 2021-05-31 | 基于Paddle框架的生活垃圾分拣机器人 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110600111.6A CN113305132B (zh) | 2021-05-31 | 2021-05-31 | 基于Paddle框架的生活垃圾分拣机器人 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN113305132A CN113305132A (zh) | 2021-08-27 |
| CN113305132B true CN113305132B (zh) | 2022-04-01 |
Family
ID=77376450
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202110600111.6A Active CN113305132B (zh) | 2021-05-31 | 2021-05-31 | 基于Paddle框架的生活垃圾分拣机器人 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN113305132B (zh) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114433475A (zh) * | 2022-01-28 | 2022-05-06 | 关慧波 | 一种中药生产装置及加工生产方法 |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20020060787A (ko) * | 2001-01-12 | 2002-07-19 | 신영종합환경 주식회사 | 음식물 쓰레기 수거용 파봉기 |
| CN206882390U (zh) * | 2017-06-01 | 2018-01-16 | 深圳市华洁环保设备有限公司 | 一种车载式生活垃圾分拣装置 |
| CN207154373U (zh) * | 2017-07-14 | 2018-03-30 | 徐恬 | 一种智能自动封闭式城市生活垃圾初分类车 |
| CN109319350A (zh) * | 2018-11-28 | 2019-02-12 | 重庆左岸环境服务股份有限公司 | 垃圾分类回收设备 |
| KR102017478B1 (ko) * | 2018-07-03 | 2019-09-03 | 주식회사 네오디아 | 음식물 쓰레기 파쇄 선별장치 |
| CN110759758A (zh) * | 2019-11-12 | 2020-02-07 | 东营奇好日用品有限公司 | 一种用于厨余垃圾处理的垃圾分类处理收集装置 |
| CN110836373A (zh) * | 2019-12-06 | 2020-02-25 | 滨州学院 | 基于生态城市的无机废弃物整集处理设备 |
| CN211618839U (zh) * | 2019-12-16 | 2020-10-02 | 上海檀栋信息科技有限公司 | 一种多功能垃圾分类处理房 |
| CN211870354U (zh) * | 2020-01-03 | 2020-11-06 | 四川兴创泰信息科技有限公司 | 一种塑料袋垃圾清理回收设备 |
| CN112027437A (zh) * | 2020-10-28 | 2020-12-04 | 王忠清 | 一种可分离垃圾袋的垃圾桶盖 |
-
2021
- 2021-05-31 CN CN202110600111.6A patent/CN113305132B/zh active Active
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20020060787A (ko) * | 2001-01-12 | 2002-07-19 | 신영종합환경 주식회사 | 음식물 쓰레기 수거용 파봉기 |
| CN206882390U (zh) * | 2017-06-01 | 2018-01-16 | 深圳市华洁环保设备有限公司 | 一种车载式生活垃圾分拣装置 |
| CN207154373U (zh) * | 2017-07-14 | 2018-03-30 | 徐恬 | 一种智能自动封闭式城市生活垃圾初分类车 |
| KR102017478B1 (ko) * | 2018-07-03 | 2019-09-03 | 주식회사 네오디아 | 음식물 쓰레기 파쇄 선별장치 |
| CN109319350A (zh) * | 2018-11-28 | 2019-02-12 | 重庆左岸环境服务股份有限公司 | 垃圾分类回收设备 |
| CN110759758A (zh) * | 2019-11-12 | 2020-02-07 | 东营奇好日用品有限公司 | 一种用于厨余垃圾处理的垃圾分类处理收集装置 |
| CN110836373A (zh) * | 2019-12-06 | 2020-02-25 | 滨州学院 | 基于生态城市的无机废弃物整集处理设备 |
| CN211618839U (zh) * | 2019-12-16 | 2020-10-02 | 上海檀栋信息科技有限公司 | 一种多功能垃圾分类处理房 |
| CN211870354U (zh) * | 2020-01-03 | 2020-11-06 | 四川兴创泰信息科技有限公司 | 一种塑料袋垃圾清理回收设备 |
| CN112027437A (zh) * | 2020-10-28 | 2020-12-04 | 王忠清 | 一种可分离垃圾袋的垃圾桶盖 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN113305132A (zh) | 2021-08-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN113305132B (zh) | 基于Paddle框架的生活垃圾分拣机器人 | |
| CN203212837U (zh) | 工业缝纫机吸尘、废料收集装置 | |
| CN219665922U (zh) | 一种轴承生产加工用废料清理装置 | |
| CN111483722A (zh) | 一种基于垃圾分类的垃圾清理无人机 | |
| CN211240340U (zh) | 一种电路设计自动贴片装置的除杂机构 | |
| CN210753810U (zh) | 一种生产硅藻土助滤剂用分选装置 | |
| CN212626721U (zh) | 一种配电箱用除尘装置 | |
| CN211865780U (zh) | 一种生活垃圾筛分机 | |
| CN115354636A (zh) | 一种带有切割功能的水面藻类收集装置 | |
| CN212120831U (zh) | 一种用于大米加工的除尘机构 | |
| CN210080051U (zh) | 摇摆式大米筛选设备 | |
| CN209616473U (zh) | 一种可防止纸屑飞扬的组合镂铣机 | |
| CN218226177U (zh) | 一种抛丸清理装置 | |
| CN201978778U (zh) | 负压式吸风多功能组合机 | |
| CN215227234U (zh) | 尘盒组件、扫地机及清扫系统 | |
| CN215352531U (zh) | 一种环保印刷机废气油墨颗粒抽风吸附装置 | |
| CN208642754U (zh) | 一种大米加工尾气排尘装置 | |
| CN213167377U (zh) | 一种印刷品烫金后的粉尘收集装置 | |
| CN216800144U (zh) | 一种纸板生产用废纸回收装置 | |
| CN215784163U (zh) | 一种细料旋风分离器 | |
| CN219785592U (zh) | 一种用于中药材加工除尘机构 | |
| CN218394722U (zh) | 一种物料多重筛分处理生产线 | |
| CN218691322U (zh) | 一种用于锯泥的高效全自动矿物分离装置 | |
| CN215654315U (zh) | 一种具有灰尘清理装置的布袋除尘器 | |
| CN212329814U (zh) | 一种不锈钢管道切割装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| TA01 | Transfer of patent application right | ||
| TA01 | Transfer of patent application right |
Effective date of registration: 20220308 Address after: 524088 No. 1 Haida Road, Mazhang District, Zhanjiang City, Guangdong Province Applicant after: Guangdong Ocean University Address before: 524000 1 Hai Da Road, Mazhang District, Zhanjiang, Guangdong Applicant before: Liu Jinhua |
|
| GR01 | Patent grant | ||
| GR01 | Patent grant |