CN113236233B - 钻井牵引机器人位移测量装置 - Google Patents
钻井牵引机器人位移测量装置 Download PDFInfo
- Publication number
- CN113236233B CN113236233B CN202110316450.1A CN202110316450A CN113236233B CN 113236233 B CN113236233 B CN 113236233B CN 202110316450 A CN202110316450 A CN 202110316450A CN 113236233 B CN113236233 B CN 113236233B
- Authority
- CN
- China
- Prior art keywords
- hydraulic
- piston
- magnetic ring
- drilling
- robot
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000005553 drilling Methods 0.000 title claims abstract description 62
- 238000006073 displacement reaction Methods 0.000 title claims abstract description 52
- 238000007789 sealing Methods 0.000 claims abstract description 30
- 238000005259 measurement Methods 0.000 claims abstract description 18
- 239000003292 glue Substances 0.000 claims description 10
- 239000007787 solid Substances 0.000 claims description 10
- 238000010586 diagram Methods 0.000 description 8
- 238000009434 installation Methods 0.000 description 7
- 238000011161 development Methods 0.000 description 4
- 230000001737 promoting effect Effects 0.000 description 4
- 238000010276 construction Methods 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 238000011160 research Methods 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 1
- 238000013016 damping Methods 0.000 description 1
- 230000007812 deficiency Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000007774 longterm Effects 0.000 description 1
- 230000035515 penetration Effects 0.000 description 1
- 239000011435 rock Substances 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 238000013519 translation Methods 0.000 description 1
Images






Classifications
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21B—EARTH OR ROCK DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B47/00—Survey of boreholes or wells
- E21B47/04—Measuring depth or liquid level
Landscapes
- Physics & Mathematics (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Geology (AREA)
- Mining & Mineral Resources (AREA)
- Geophysics (AREA)
- Environmental & Geological Engineering (AREA)
- Fluid Mechanics (AREA)
- General Life Sciences & Earth Sciences (AREA)
- Geochemistry & Mineralogy (AREA)
- Manipulator (AREA)
- Earth Drilling (AREA)
Abstract
本发明涉及钻井机器人位移测量系统,系统主要由支撑杆、限位器、液压A、液压B、液压A活塞、液压B活塞、位移传感器A、位移传感器B、密封挡板A、密封挡板B、位移传感器A、位移传感器B、波导管A、波导管B、磁环A、磁环B、磁环支板A、磁环支板B组成。本发明结构简单,测量结果稳定,成本低。基于钻井机器人速度测量装置,可实现钻井机器人的速度的即时测量、即时反馈,可为钻井机器人自动钻进提供数据参考。
Description
技术领域
本发明涉及井下机器人领域,尤其涉及钻井机器人位移测量装置。
背景技术
为了提高页岩气等非常规油气开采的综合经济效益,大位移水平井越来越受到国内外的青睐。因此,开展长水平段钻井高效安全快速建井技术研究,对缓解我国能源供需矛盾、促进经济社会科学发展具有重大战略意义。然而,随着水平井水平段位移的增加,钻柱摩阻增大,钻柱极易“托压”,导致钻压加载异常困难,显著增加了建井周期,降低了油气开发的综合经济效益,阻碍了页岩气等非常规油气的长效开发。利用井下机器人对钻柱进行牵引,可有效解决摩阻过大的问题,同时能为钻头提供破岩的钻压,可实现智能闭环钻进。
目前,钻井机器人依然停留在理论研究方面,尚未见现场试验或应用的报道。其中,钻井机器人的自动化和智能化尚未得到有效突破。而机器人对钻进信息的获取是钻井机器人实现自动化、智能化最重要、最直接的方法。在钻井机器人钻进速度测量方面:尚未存在实现在井下随钻进行的可靠、即时的测量装置。在钻井机器人速度自动控制中,速度的获取、调整、反馈直接决定钻井机器人的自动化、智能化的重要条件。目前发明了CN201380006327.3、 CN201780047640.X;
专利CN201380006327.3采用基于钻台钻井数据和顶驱钻井数据完成对钻井速度的计算,虽然对传感器密封条件要求低,数据易获取,装置简单,但只能间接推算,无法直接获取准确数据;
专利CN201780047640.X采用通过旋转顶端驱动速度和顶端驱动速度,并根据井眼钻井设备的阻尼特性,计算井下速度和井下转矩,虽然易于实现,但仍基于理论与公式,存在较大的误差,且具有延时性。
这2项专利仅通过地面旋转系统的数据间接测量井下钻井速率,无法获得直接、即时的钻进位移及速度数据,无法即时完成对井下钻进机器人进行即时的数据传输和反馈。现有钻井机器人无法为钻进机器人的速度自动控制提供实验数据支撑,这是导致目前钻井机器人无法实现速度的自动控制的重要原因。因此,有必要发明可开展钻井机器人速度测量的装置,为钻进机器人实现自动化提供数据参考,进而促进钻井机器人应用,推动页岩气等非常规油气开采。
发明内容
本发明目的在于克服现有技术的不足,提供钻井机器人位移测量装置。
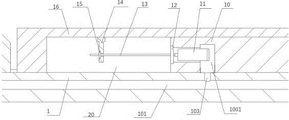
钻井机器人位移测量装置,它包括支撑杆(1)、限位器(2)、液压A(3)、液压B(16)、液压A活塞(4)、液压B活塞(10)、位移传感器A(5)、位移传感器B(11)、密封挡板A(6)、密封挡板B(12)、波导管A(7)、波导管B(13)、磁环A(9)、磁环B(15)、磁环支板A(8)、磁环支板B(14)、电脑(17)、钻井机器人(18);
所述:液压A(3)、液压B(16)、液压A活塞(4)和液压B活塞(10)同轴安装在支撑杆(1)上;液压A活塞(4)安装在液压A(3)与支撑杆(1)之间的空腔a中;液压B活塞(10)安装在液压B(16)与支撑杆(1)之间的空腔b(20)中,其中液压B活塞(10) 与支撑杆(1)固连;
所述:磁环A(9)和磁环支板A(8)通过螺钉固连,其中磁环支板A(8)与液压A(3) 通过螺钉固连;密封挡板A(6)与位移传感器A(5)通过螺纹联结,其中密封挡板A(6) 与液压A活塞(4)通过固体胶进行固定;液压A活塞(4)空槽b中,在液压A活塞(4)运动极限位置以螺纹方式安装有限位器(2),实现液压A(3)与液压A活塞(4)之间的位移测量功能;
所述:磁环B(15)和磁环支板B(14)通过螺钉固连,其中磁环支板B(14)与液压B(16)通过螺钉固连;密封挡板B(12)与位移传感器B(11)通过螺纹联结,其中密封挡板 B(12)与液压B活塞(10)通过固体胶进行固定,实现液压B(16)与液压B活塞(10)之间的机器人行进位移测量功能。
液压A(3)与液压B(16)内缸壁上设有2-4个周向分布均匀的凹槽(301)。
磁环支板A(8)与磁环支板B(14)上铣有圆形凹槽(803),在凹槽中心布置一个通孔(801),在通孔(801)径向外沿方向上周向均匀布置有2-4个螺纹孔(802)。
密封挡板A(6)与密封挡板B(12)均在中心设有密封螺纹孔(601),径向方向上设有2-4个轴对称通孔(602)。
液压A活塞(4)、液压B活塞(10)在外部结构相同设有以通孔(404)轴向对称的2-4个圆形凹槽(401),圆形凹槽(401)中心设置有通孔(402),径向上设置有均匀分布的2-4 个螺纹孔(403);
所述:液压B活塞(10)内部设置有弧形槽(1001);液压A活塞(4)内为轴向长槽(401)。
支撑杆(1)中轴向设置有通孔(101),在其径向设置通孔(103)、螺纹孔(102)。
位移传感器A(5)、位移传感器B(11)均为磁致式位移传感器,位移传感器A(5)通过螺纹连接在密封挡板A(6),从而固定在液压A活塞(4)上,位移传感器A(5)的磁环A(9) 利用固体胶或螺钉固定在磁环支板A(8)上,位移传感器B(11)利用螺纹连接固定在密封挡板B(12),从而固定在液压B活塞(10)上,位移传感器B(11)的磁环B(15)利用固体胶螺钉固定在磁环支板B(14)上。
本发明具有以下优点:本发明属于钻井机器人速度测量装置,测量装置简单,测量结果稳定,成本低。基于钻井机器人速度测量装置,可实现钻井机器人的速度的即时测量、即时反馈,可为钻井机器人自动钻进提供数据参考,进而促进钻井机器人应用,推动页岩气等非常规油气开采。
附图说明
图1为钻井机器人位移测量系统结构示意图;
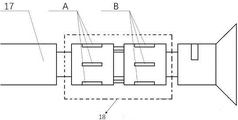
图2为抓具平移液压缸结构图,为图1中A部分详细结构;
图3为机器人行进液压缸结构图,为图1中B部分详细结构;
图4为图1和图2中液压缸缸壁安装结构示意图;
图5为图1和图2中磁环支板结构示意图;
图6为图1和图2中密封挡板结构示意图;
图7为图1和图2中活塞结构示意图;
图8为钻井牵引机器人安装位置示意图。
图中:1-支撑杆,2-限位器,3-液压A,4-液压A活塞,5-位移传感器A,6-密封挡板A,7-波导管A,8-磁环支板A,9-磁环A,10-液压B活塞,11-位移传感器B,12-密封挡板B,13- 波导管B,14-磁环支板B,15-磁环B,16-液压B,17-电脑,18-钻井机器人,101-通孔,102- 螺纹孔,103-通孔,301-安装槽,401-安装沉头孔,402-安装孔,403-螺纹孔,404-通孔,601- 通孔,602-安装孔,801-通孔,802-安装孔,803-安装沉头孔。
具体实施方式
下面结合附图对本发明做进一步的描述,本发明的保护范围不局限于以下所述:
本发明的目的是提供一种钻井机器人位移测量装置,以弥补现有技术的空白。为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
如图1~7所示:在地面上将钻井机器人安装完成后,完成下井,并钻井,钻井完成后起钻,从钻井机器人(18)中提取位移数据;
安装位移传感器的具体步骤为:将磁环B(15)用螺钉安装在磁环支板B(14)的安装沉头孔(803)上、磁环A(9)用螺钉安装在磁环支板A(8)的安装沉头孔(803)上,再将密封挡板A(6)穿在波导管A(7)上,通过安装螺纹安装在位移传感器A(5)上,将密封挡板B(12)穿在波导管B(13)上,通过安装螺纹安装在位移传感器B(11)上,通过线孔(101)将位移传感器A(5)和位移传感器B(11)的数据线连接在钻井机器人(18)的电脑(17)上,再将波导管A(7)穿入磁环支板A(8)的通孔(801)中,将波导管B(13) 穿入磁环支板B(14)的通孔(801)中,再将密封挡板A(6)通过固体胶安装在活塞(4) 的安装沉头孔(401)中,将磁环支板B(14)通过固体胶安装在活塞(10)的沉头孔(401) 中,最后将磁环支板B(14)通过螺钉安装在液压B(16)的弧形槽(301)中,将磁环支板 A(8)通过螺钉安装在液压A(3)的弧形槽(301)中。
Claims (7)
1.钻井牵引机器人位移测量装置,其特征在于:它包括支撑杆(1)、限位器(2)、液压A(3)、液压B(16)、液压A活塞(4)、液压B活塞(10)、位移传感器A(5)、位移传感器B(11)、密封挡板A(6)、密封挡板B(12)、波导管A(7)、波导管B(13)、磁环A(9)、磁环B(15)、磁环支板A(8)、磁环支板B(14)、电脑(17)、钻井机器人(18);
液压A(3)、液压B(16)、液压A活塞(4)和液压B活塞(10)同轴安装在支撑杆(1)上;液压A活塞(4)安装在液压A(3)与支撑杆(1)之间的空腔a中;液压B活塞(10)安装在液压B(16)与支撑杆(1)之间的空腔b(20)中,其中液压B活塞(10)与支撑杆(1)固连;
磁环A(9)和磁环支板A(8)通过螺钉固连,其中磁环支板A(8)与液压A(3)通过螺钉固连;密封挡板A(6)与位移传感器A(5)通过螺纹联结,其中密封挡板A(6)与液压A活塞(4)通过固体胶进行固定;液压A活塞(4)空槽b中,在液压A活塞(4)运动极限位置以螺纹方式安装有限位器(2),实现液压A(3)与液压A活塞(4)之间的位移测量功能;
磁环B(15)和磁环支板B(14)通过螺钉固连,其中磁环支板B(14)与液压B(16)通过螺钉固连;密封挡板B(12)与位移传感器B(11)通过螺纹联结,其中密封挡板B(12)与液压B活塞(10)通过固体胶进行固定,实现液压B(16)与液压B活塞(10)之间的机器人行进位移测量功能;
基于钻井机器人速度测量装置,实现钻井机器人的速度的即时测量、即时反馈,为钻井机器人自动钻进提供数据参考。
2.根据权利要求1所述的钻井牵引机器人位移测量装置,其特征在于:液压A(3)与液压B(16)内缸壁上设有2-4个周向分布均匀的凹槽(301)。
3.根据权利要求1所述的钻井牵引机器人位移测量装置,其特征在于:磁环支板A(8)与磁环支板B(14)上铣有沉头孔(803),在凹槽中心布置一个通孔(801),在通孔(801)径向外沿方向上周向均匀布置有2-4个螺纹孔(802)。
4.根据权利要求1所述的钻井牵引机器人位移测量装置,其特征在于:密封挡板A(6)与密封挡板B(12)均在中心设有密封螺纹孔(601),径向方向上设有2-4个轴对称通孔(602)。
5.根据权利要求1所述的钻井牵引机器人位移测量装置,其特征在于:液压A活塞(4)、液压B活塞(10)在外部结构相同设有以通孔(404)轴向对称的2-4个圆形凹槽(401),圆形凹槽(401)中心设置有通孔(402),径向上设置有均匀分布的2-4个螺纹孔(403);
液压B活塞(10)内部设置有弧形槽(1001);液压A活塞(4)内为轴向长槽(401)。
6.根据权利要求1所述的钻井牵引机器人位移测量装置,其特征在于:支撑杆(1)中轴向设置有通孔(101),在其径向设置通孔(103)、螺纹孔(102)。
7.根据权利要求1所述的钻井牵引机器人位移测量装置,其特征在于:位移传感器A(5)、位移传感器B(11)均为磁致式位移传感器,位移传感器A(5)通过螺纹连接在密封挡板A(6),从而固定在液压A活塞(4)上,位移传感器A(5)的磁环A(9)利用固体胶或螺钉固定在磁环支板A(8)上,位移传感器B(11)利用螺纹连接固定在密封挡板B(12),从而固定在液压B活塞(10)上,位移传感器B(11)的磁环B(15)利用固体胶螺钉固定在磁环支板B(14)上。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110316450.1A CN113236233B (zh) | 2021-03-25 | 2021-03-25 | 钻井牵引机器人位移测量装置 |
| US17/387,956 US11781420B2 (en) | 2021-03-25 | 2021-07-28 | Displacement measuring device and speed measuring method of drilling traction robot |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110316450.1A CN113236233B (zh) | 2021-03-25 | 2021-03-25 | 钻井牵引机器人位移测量装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN113236233A CN113236233A (zh) | 2021-08-10 |
| CN113236233B true CN113236233B (zh) | 2022-10-14 |
Family
ID=77130726
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202110316450.1A Active CN113236233B (zh) | 2021-03-25 | 2021-03-25 | 钻井牵引机器人位移测量装置 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN113236233B (zh) |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011051321A1 (en) * | 2009-10-30 | 2011-05-05 | Maersk Oil Qatar A/S | Downhole apparatus |
| CN203129999U (zh) * | 2012-09-17 | 2013-08-14 | 重庆科技学院 | 一种电控液压驱动连续油管井下牵引器的控制系统 |
| CN104060960A (zh) * | 2014-06-25 | 2014-09-24 | 中国石油大学(北京) | 一种自扶正式井下牵引装置 |
| RU2608136C1 (ru) * | 2016-03-14 | 2017-01-16 | Анатолий Иванович Литвинов | Робот буровой универсальный |
| CN205909778U (zh) * | 2016-01-21 | 2017-01-25 | 中国石油大学(北京) | 一种水下高压用磁致伸缩位移传感器密封装置 |
| CN107366523A (zh) * | 2017-08-17 | 2017-11-21 | 西南石油大学 | 一种连续油管牵引机器人 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| NZ627706A (en) * | 2012-01-23 | 2015-06-26 | Transocean Sedco Forex Ventures Ltd | High definition drilling rate of penetration for marine drilling |
| AU2012370307B2 (en) * | 2012-02-13 | 2015-02-05 | Halliburton Energy Services, Inc. | Piston tractor system for use in subterranean wells |
| CN102777145B (zh) * | 2012-08-16 | 2015-07-29 | 中国石油大学(北京) | 一种电控液压驱动连续油管井下牵引器 |
| NL2016859B1 (en) * | 2016-05-30 | 2017-12-11 | Engie Electroproject B V | A method of and a device for estimating down hole speed and down hole torque of borehole drilling equipment while drilling, borehole equipment and a computer program product. |
| BR102017017526B1 (pt) * | 2017-08-15 | 2023-10-24 | Insfor - Innovative Solutions For Robotics Ltda - Me | Sistema de lançamento de unidade autônoma para trabalhos em poços de óleo e gás, e método de instalação e desinstalação de unidade autônoma no sistema de lançamento |
| CN107386971B (zh) * | 2017-08-21 | 2019-05-17 | 西南石油大学 | 一种连续油管钻井机器人地面实验模拟装置及方法 |
| CN107701118A (zh) * | 2017-08-21 | 2018-02-16 | 西南石油大学 | 一种微小井眼水平井连续油管钻井机器人的支撑结构 |
| CN112014221B (zh) * | 2020-09-03 | 2022-02-15 | 西南石油大学 | 钻井牵引机器人支撑机构测试装置 |
-
2021
- 2021-03-25 CN CN202110316450.1A patent/CN113236233B/zh active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011051321A1 (en) * | 2009-10-30 | 2011-05-05 | Maersk Oil Qatar A/S | Downhole apparatus |
| CN203129999U (zh) * | 2012-09-17 | 2013-08-14 | 重庆科技学院 | 一种电控液压驱动连续油管井下牵引器的控制系统 |
| CN104060960A (zh) * | 2014-06-25 | 2014-09-24 | 中国石油大学(北京) | 一种自扶正式井下牵引装置 |
| CN205909778U (zh) * | 2016-01-21 | 2017-01-25 | 中国石油大学(北京) | 一种水下高压用磁致伸缩位移传感器密封装置 |
| RU2608136C1 (ru) * | 2016-03-14 | 2017-01-16 | Анатолий Иванович Литвинов | Робот буровой универсальный |
| CN107366523A (zh) * | 2017-08-17 | 2017-11-21 | 西南石油大学 | 一种连续油管牵引机器人 |
Non-Patent Citations (2)
| Title |
|---|
| 井下探险救援机器人的设计;侯宪伦等;《煤矿机械》;20090815(第08期);全文 * |
| 新型井下细小管道检测系统的研究;任思等;《煤矿机械》;20080415(第04期);全文 * |
Also Published As
| Publication number | Publication date |
|---|---|
| CN113236233A (zh) | 2021-08-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN106761480B (zh) | 一种井下扭矩自平衡有缆钻具系统 | |
| US11047183B2 (en) | Coiled tubing drilling robot, robot system and process parameter control method thereof | |
| CN106437513A (zh) | 一种复杂结构井减摩阻及动力钻具工具面调整方法 | |
| CN112014221A (zh) | 钻井牵引机器人支撑机构测试装置 | |
| CN204343997U (zh) | 一种减摩及电缆保护的油管短节 | |
| WO2022041679A1 (zh) | 一种高效智能导向钻井系统及钻井方法 | |
| CN101696628A (zh) | 一种导向偏置工具及偏置方法 | |
| CN104420861A (zh) | 一种控制石油天然气钻井减小钻柱粘滞阻力的方法 | |
| CN113236233B (zh) | 钻井牵引机器人位移测量装置 | |
| CN115387731A (zh) | 一种泥浆驱动导向钻井系统 | |
| CN203321322U (zh) | 一种可延伸钻井进尺的减摩阻工具 | |
| CN115653496B (zh) | 一种二级反扭距弯螺杆定向工具 | |
| CN115434641A (zh) | 微型桩成孔钻机 | |
| CN216464630U (zh) | 一种粮仓探测机器人 | |
| CN206448779U (zh) | 一种井下扭矩自平衡有缆钻具系统 | |
| CN117513983B (zh) | 实现钻柱全旋转的智能定向装置及方法 | |
| CN101328784A (zh) | 具有自控系统的钻进导程同步跟踪螺纹桩机 | |
| CN212054668U (zh) | 一种垂直钻井倾斜检测系统 | |
| CN202392109U (zh) | 一种用于井下动力钻具动密封用两级密封结构 | |
| US11781420B2 (en) | Displacement measuring device and speed measuring method of drilling traction robot | |
| CN113187461B (zh) | 钻井牵引机器人速度测试方法 | |
| CN207245668U (zh) | 一种水下井口锁紧工具 | |
| CN201043441Y (zh) | 一种变径方位稳定器 | |
| CN202578631U (zh) | 控压钻井井口回压控制系统 | |
| CN202946067U (zh) | 机械式井筒锚定器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |