CN112918552B - Heavy multi-axle vehicle steering system based on hydraulic transformer and control method thereof - Google Patents
Heavy multi-axle vehicle steering system based on hydraulic transformer and control method thereof Download PDFInfo
- Publication number
- CN112918552B CN112918552B CN202110317079.0A CN202110317079A CN112918552B CN 112918552 B CN112918552 B CN 112918552B CN 202110317079 A CN202110317079 A CN 202110317079A CN 112918552 B CN112918552 B CN 112918552B
- Authority
- CN
- China
- Prior art keywords
- steering
- hydraulic transformer
- hydraulic
- axle
- valve
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/06—Power-assisted or power-driven steering fluid, i.e. using a pressurised fluid for most or all the force required for steering a vehicle
- B62D5/065—Power-assisted or power-driven steering fluid, i.e. using a pressurised fluid for most or all the force required for steering a vehicle characterised by specially adapted means for varying pressurised fluid supply based on need, e.g. on-demand, variable assist
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
- B62D6/001—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits the torque NOT being among the input parameters
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
Abstract
The invention provides a heavy multi-axle vehicle steering system based on a hydraulic transformer, which comprises a plurality of steering axles arranged in sequence; a steering power cylinder for driving a steering axle is arranged in the steering axle; the power steering cylinder is connected with the servo proportional valve and the hydraulic transformer combined device; when the hydraulic transformer combined device is used, the control system identifies the expected oil supply pressure of each steering shaft and outputs the hydraulic pressure suitable for each steering resisting moment, so that the heavy multi-shaft vehicle can complete the steering action smoothly and reduce the energy consumption to the maximum extent; and through series-parallel switching loops, the problem that steering is completed by an overlarge steering resistance moment under an extreme working condition is difficult to overcome is further solved. Through the process, the energy consumption generated by the steering system of the heavy multi-axle vehicle is comprehensively reduced, and the original good steering characteristic is ensured.
Description
Technical Field
The invention relates to the technical field of vehicle steering systems, in particular to a heavy multi-axis vehicle steering system based on a hydraulic transformer and a control method thereof.
Background
The heavy multi-axle vehicle is widely applied to the fields of large-scale infrastructure and material transportation (such as large-tonnage all-terrain cranes, large-scale girder trucks, mining dump trucks and other civil equipment) and military heavy industry traffic (such as large-scale missile transport vehicles, heavy electronic launch vehicles, traction carrier vehicles and other military special vehicles). With the development of economy and the attention of the country, the requirements of industries such as military engineering machinery, petrochemical industry, water conservancy and hydropower and the like on heavy multi-axle vehicles are increasing day by day, and meanwhile, with the increasingly prominent global energy problems and environmental problems, the energy-saving requirements of the heavy multi-axle vehicles gradually become the focus of close attention in the industrial and military fields. For a heavy multi-axle vehicle, the energy-saving research of the steering system of the heavy multi-axle vehicle is not only beneficial to further breaking through the steering technology of the heavy multi-axle vehicle, but also has a vital significance for improving the energy efficiency of the whole vehicle.
Common vehicle steering systems comprise a hydraulic power-assisted steering system, an electric power-assisted steering system and an electric power-assisted steering system, but the heavy multi-axle vehicle has large steering resistance moment, wide variation range and various steering modes (such as minimum radius steering, crab steering and highway mode steering), and the hydraulic power-assisted steering system and the electric power-assisted steering system are difficult to simultaneously realize the off-road property and the flexibility of all-road driving, so that the electric power-assisted steering system becomes the first choice of the heavy multi-axle vehicle steering system at the present stage. However, because a heavy multi-axle vehicle has a plurality of steering actuators, and the existing electro-hydraulic power steering system adopts a single pump source driving mode, the power required by each steering axle is difficult to supply according to requirements, so that each axle generates unnecessary energy consumption during steering; meanwhile, in the process that the electro-hydraulic power-assisted steering system controls the output of the steering power-assisted cylinder through the servo proportional valve, serious throttling loss is easily caused.
Based on the above problems, the current energy-saving research of vehicle electro-hydraulic power steering systems mainly develops around two aspects of a pump source and a hydraulic system: (1) the energy-saving optimized design for the steering pump comprises the following aspects: firstly, a sliding groove is arranged in a blade groove of a steering pump rotor, a sliding block is arranged in the sliding groove and is mutually balanced with a spring in a spring groove formed in the rotor, so that the sliding block slides in the sliding block groove along with the change of the rotating speed of the steering pump, the effective volume of the pump is changed, the steering pump can control the displacement according to the speed, the output of redundant flow in the pump is reduced, and the throttling loss of an overflow valve is reduced; the rotor and the stator of the steering vane pump are eccentrically arranged, so that the stator is abutted against the inner surface of the annular seat under the action of a spring, and the eccentricity between the stator and the rotor is automatically adjusted through the feedback of a load to change the output flow of the pump; and thirdly, by adopting a load sensing control swash plate plunger pump, a distributing element priority valve is omitted, throttling loss is reduced, steering comfort is improved, and energy consumption is reduced. (2) The energy-saving optimization design of the hydraulic system comprises the following aspects: firstly, a constant delivery pump driven by an alternating current motor is used as a main oil supply source, an energy accumulator is used as an auxiliary oil supply source, when a vehicle does not turn and the pressure of the energy accumulator is higher, the motor stops working, after the vehicle turns, the energy accumulator supplies oil to a system at the stage that the motor is about to be started, and after the motor is started, the rotating speed of the motor is adjusted according to the turning speed, so that the oil supply to a steering power cylinder as required is realized, the throttling loss is reduced, and the energy consumption is improved; and secondly, an electromagnetic clutch is arranged between the engine and the steering pump, and an Electronic Control Unit (ECU) changes the magnitude of exciting current input into the electromagnetic clutch according to working conditions so as to adjust the steering power assistance, realize matching according to required power and reduce the energy consumption of the system.
The prior art helps to reduce the energy loss of the steering system and improve the energy efficiency, but still has some defects and limitations, which are mainly expressed as follows: the existing heavy multi-axle vehicle steering system adopts a one-source multi-drive control mode, namely, a single hydraulic pump controls a plurality of steering shafts, the maximum steering resistance torque in each steering shaft is adapted by increasing the pressure of the single pump source during work, and the steering shaft with the low steering resistance torque generates redundant energy consumption. That is, in the actual steering process of the heavy multi-axle vehicle, because the steering resisting moment of each axle has difference and wide variation range, and usually a single pump source provides power for a plurality of actuators at the same time, when the power of the steering actuator is insufficient, the action of the steering axle where the maximum steering resisting moment is located can be often met only by increasing the pressure of the pump source, so as to ensure the complete steering of the vehicle, and this will lead to the increase of the energy consumption on the steering axle where the low steering resisting moment is located. Meanwhile, the heavy multi-axle vehicle has complex running condition and various steering modes, and also brings the challenges in the aspect of energy-saving optimization design to the one-source multi-drive multi-axle steering system.
Disclosure of Invention
The invention provides a heavy multi-axle vehicle steering system based on a hydraulic transformer and a control method thereof.A hydraulic transformer combination device is arranged, and the same hydraulic transformer combination device controls a part of steering shafts with smaller difference of turning angles and steering resistance moments under most working conditions and steering modes. In addition, through the designed series-parallel switching loop, the problem that the heavy multi-axle vehicle is difficult to overcome the overlarge steering resistance moment to complete steering under the extreme working condition is further solved. Through the process, the energy consumption generated by the steering system of the heavy multi-axle vehicle is further comprehensively reduced, and the original good steering characteristic is ensured.
The invention adopts the following technical scheme.
A hydraulic transformer based heavy duty multi-axle vehicle steering system comprising a plurality of sequentially arranged steering axles; a steering power cylinder for driving a steering axle is arranged in the steering axle; the power steering cylinder is connected with the servo proportional valve and the hydraulic transformer combined device; the hydraulic transformer combination device is connected with the controller and adjusts the oil supply pressure of the steering power cylinder according to the instruction of the controller; the hydraulic transformer combination device of each steering axle regulates the pressure of the steering resistance cylinder of the steering axle to which the hydraulic transformer combination device belongs; the hydraulic transformer combination devices are connected to form a hydraulic adjusting loop; the hydraulic pressure regulating loop can simultaneously regulate the pressure of a plurality of steering resistance cylinders under the control of the controller, or regulate and amplify the pressure of a specific steering resistance cylinder; when the hydraulic adjusting circuit is used for steering the vehicle, the controller calculates steering resistance torque according to steering working conditions, and adjusts the pressure adjusting operation of the hydraulic adjusting circuit on each steering power cylinder by changing the series connection mode or the parallel connection mode between each hydraulic transformer combination device and each steering axle steering power cylinder, so that the steering torque of each steering axle for driving a steering axle is adjusted.
The steering power cylinder comprises a left steering power cylinder (8) and a right steering power cylinder (9), and is connected with the hydraulic transformer combination device through a servo proportional valve (12);
the hydraulic transformer combination device comprises a hydraulic transformer (5), a hydraulic transformer control assembly (4), an electromagnetic directional valve (6) for controlling the working state of the hydraulic transformer, a hydraulic transformer port plate corner sensor (14) and a switching loop for determining the connection mode of the hydraulic transformer in an oil pressure regulating loop;
the hydraulic transformer is respectively connected with the electromagnetic directional valve and the servo proportional valve; the hydraulic transformer control assembly (4) is connected with the pilot oil source (3), and the hydraulic transformer outputs the regulated pressure by controlling the corner of a valve plate of the hydraulic transformer;
the control end of the controller is respectively connected with the controlled end of the hydraulic transformer control assembly, the electromagnetic directional valve and the servo proportional valve and is also connected with a switch valve in a switching loop, and the receiving end of the controller is connected with a vehicle speed sensor (10), a wheel corner sensor (11), a valve plate corner sensor (14) of the hydraulic transformer and a pressure sensor (13); the vehicle speed sensor is used for detecting the running speed of the multi-axis vehicle, the wheel corner sensor is used for detecting the corner of the right side or left side wheel of a steering axle of the vehicle, and the pressure sensor is arranged at the servo proportional valve and used for detecting the valve port pressure of the servo proportional valve;
the switching circuit comprises a plurality of switching valves controlled by a controller; the controller calculates the steering resistance torque in the current state according to the vehicle working condition, the wheel state, the steering axle working condition and the valve port pressure, and switches the connection mode of each hydraulic transformer between parallel connection or series connection by controlling the opening and closing state of each switch valve so as to adjust the steering torque output performance of the steering system.
Two adjacent steering axles are respectively a first group of steering systems and a second group of steering systems, a hydraulic transformer of the first group of steering systems is a first hydraulic transformer, a hydraulic transformer of the second group of steering systems is a second hydraulic transformer, and in a switching loop connected with the two steering axles, the switching loop is connected with the input end of the first hydraulic transformer and the input end of the second hydraulic transformer through a first switch valve (17), the switching loop is connected with the input end of the first hydraulic transformer and the output end of the second hydraulic transformer through a second switch valve (18), the switching loop is connected with the output end of the first hydraulic transformer and a fourth switch valve of the switching loop through a third switch valve (19), and the switching loop is connected with the output end of the second hydraulic transformer and the third switch valve through a fourth switch valve (20); the input of second hydraulic transformer still is connected with the pump source, and the output of first hydraulic transformer still is connected with first group of a steering system, and the output of second hydraulic transformer still is connected with second group of a steering system behind the fourth ooff valve.
The port A of the hydraulic transformer (5) is connected with the port A of the electromagnetic directional valve, the port B of the hydraulic transformer (5) is connected with an oil inlet of the servo proportional valve (12), and the port T of the hydraulic transformer (5) is connected with the oil tank (1);
the working state of the hydraulic transformer is determined by the electromagnetic directional valve, when the electromagnetic directional valve keeps a power-off state, the hydraulic transformer works, and pump source oil flows into the hydraulic transformer and is input into the servo proportional valve after being subjected to voltage boosting and reducing; when the electromagnetic directional valve is kept in an electrified state, the hydraulic transformer does not work at the moment, and oil in the oil tank is directly input into the servo proportional valve.
The steering system at the steering axle is an electro-hydraulic servo steering system and comprises an oil tank (1), a hydraulic pump (2), a servo proportional valve (12), a frame (7), a left steering power cylinder (8) and a right steering power cylinder (9); a piston rod of the left steering power-assisted cylinder is hinged with a first trapezoid arm at the wheel, and a cylinder body of the left steering power-assisted cylinder is hinged with the frame; a piston rod of the right steering power-assisted cylinder is hinged with a second trapezoidal arm at the wheel, and a cylinder body of the right steering power-assisted cylinder is also hinged with the frame; a first working oil path R1 is formed by a rod cavity of the left steering power cylinder and a rodless cavity of the right steering power cylinder; a rodless cavity of the left steering power cylinder and a rod cavity of the right steering power cylinder form a second working oil path R2, and the two working oil paths R1 and R2 are respectively connected with a working oil port A, B of the servo proportional valve.
The control method of the steering system of the heavy-duty multi-axle vehicle based on the hydraulic transformer uses the steering system, in the control method, steering axles with similar turning angles and steering resisting moments under normal working conditions of the vehicle are controlled by the same hydraulic transformer, and the steering axles with large turning angle difference and large steering resisting moment difference are respectively controlled by the hydraulic transformers of the respective steering axles.
When the steering axle of the vehicle is in a normal working condition, the flow of the control method comprises the following steps;
step S1: setting a system pump source pressure value as a pressure value matched with medium steering resistance torque of the vehicle;
step S2: the controller receives vehicle speed information detected by a vehicle speed sensor, wheel corner information detected by a corner sensor and valve port pressure information of a servo proportional valve detected by a pressure sensor;
step S3: the controller obtains the steering resisting moment of each steering axle under the current working condition and the steering mode through calculation processing according to the vehicle speed information, the corner information and the pressure information;
step S4: the controller makes the following decisions according to the obtained steering resistance torque of each steering axle:
firstly, when steering shafts controlled by the same hydraulic transformer are in a low steering resistance moment state, the hydraulic transformer works at the moment, so that oil output by a pump source flows into the hydraulic transformer, and the hydraulic transformer performs pressure reduction treatment on the oil pressure flowing into a servo proportional valve;
when the steering shafts controlled by the same hydraulic transformer are in a middle steering resistance moment state, the hydraulic transformer does not work at the moment, and the pressure increasing and reducing treatment is not needed, so that the oil output by the pump source directly flows into the servo proportional valve;
when the steering shafts controlled by the same hydraulic transformer are in a high steering resistance moment state, the hydraulic transformer works at the moment, so that oil output by the pump source flows into the hydraulic transformer, and the hydraulic transformer performs boosting treatment on the pressure of the oil flowing into the servo proportional valve;
step S5: after the controller judges that the hydraulic transformer is in a working state, the expected oil supply pressure of each steering axle steering system is identified according to the steering resistance moment of each steering axle, the controller compares a valve port pressure signal of the servo proportional valve with an expected oil pressure signal, if deviation exists, the controller continuously sends a control signal to a hydraulic transformer control assembly to drive a valve plate of the hydraulic transformer to rotate, and the control angle of the valve plate of the hydraulic transformer is changed, so that the oil pressure input into the servo proportional valve is changed until the steering system reaches the expected oil pressure.
When the vehicle is in a normal running working condition, the hydraulic transformers of the steering axles are connected in parallel, and the hydraulic transformers are controlled to perform pressure increasing and reducing treatment on hydraulic oil output by a single pump source in a primary pressure changing mode according to steering resistance moment information obtained through detection and calculation and input the hydraulic oil into servo proportional valves of the steering axles.
When the vehicle is in the extreme working condition of super large steering resistance moment, the controller detects that the calculated steering resistance moment is sharply increased, and the parallel connection of the hydraulic transformers of each steering axle is changed into series connection through the switching loop, so that the one-level voltage transformation mode of each steering axle is switched into the two-level voltage transformation mode, hydraulic oil output by the pump source is more easily pushed to a steering axle after the two-level pressurization, and the steering is completed by overcoming the steering resistance moment by the multi-axle vehicle.
When the hydraulic transformer control assembly controls the corner of the valve plate of the hydraulic transformer, the control mode is closed-loop feedback control, and the control mode is as follows: when the hydraulic transformer needs to control the oil pressure of the valve port of the servo proportional valve to follow the expected oil pressure signal, the rotating angle of the valve port plate of the hydraulic transformer rotates towards the expected rotating angle indicated by the expected oil pressure signal, namely when the pressure of the valve port of the servo proportional valve is consistent with the expected oil pressure signal, the rotating angle information of the valve port plate is fed back through the rotating angle sensor of the valve port plate at the moment and is used as the expected rotating angle of the closed-loop control of the rotating angle position of the valve port plate, so that the output pressure of the hydraulic transformer can counteract the fluctuation of the output pressure range caused by the small angle deviation before the steering action is finished.
The invention has the following beneficial effects:
1) by arranging the hydraulic transformer, the oil pressure input to each shaft steering system is adjusted, the single pump is simultaneously suitable for the steering resistance torque of each shaft, the energy consumption generated by the steering shaft with the low steering resistance torque is reduced, and the pressure supply burden of a pump source is also reduced. The hydraulic transformer is controlled to increase or decrease the pressure by controlling the turning angle of the valve plate of the hydraulic transformer according to the steering resistance torque applied to a steering system of each shaft, so that the hydraulic transformer adjusts the oil pressure input to each steering shaft by the pump source according to the steering resistance torque of each shaft, and the single pump source is matched and adapted to different steering resistance torques.
2) On the basis of arranging the hydraulic transformer, the hydraulic transformer is utilized to carry out grouping joint control on the steering shafts according to the characteristics of the vehicle under most steering working conditions and steering modes, so that the hardware and control cost is further reduced. The steering shaft with smaller difference of the turning angle and the steering resistance moment under most working conditions and steering modes is combined and controlled by the same hydraulic pressure transformation device, so that the simultaneous pressure regulation of several steering shafts by one hydraulic pressure transformer is realized to overcome the steering resistance moment, and the problems of aggravated algorithm task, hardware redundancy and overhigh cost of a controller caused by excessive vehicle steering shafts are further solved while the energy consumption is considered for the heavy multi-shaft vehicle.
3) Through setting up the switching circuit, adjust the state that hydraulic transformer inserts the steering spindle, make heavy multiaxis vehicle overcome and only rely on one-level pressure boost and can't turn to the problem under the extreme operating mode. Under normal working conditions, hydraulic transformers are connected into each steering shaft in a grouping and parallel mode, at the moment, the condition that a single pump adapts to the steering resistance torque of each shaft can be met through primary pressure regulation, and the energy-saving requirement can be guaranteed; when the multi-axle vehicle is in an extreme steering working condition, the multi-axle vehicle is influenced by an overlarge steering resistance moment, the effect of primary pressurization is far insufficient for completing steering, and at the moment, the hydraulic transformer is changed from the original parallel connection to the servo proportional valve to the series connection through the combined control of all switch valves in a switching loop, so that the secondary regulation of pressure is realized, the steering power in a steering actuator is further increased, the steering is successfully completed under the extreme steering working condition, and meanwhile, the regulating range of the pump source pressure is wider due to the configuration structure of secondary transformation.
Drawings
The invention is described in further detail below with reference to the following figures and detailed description:
FIG. 1 is a schematic view of a steering system at a single steer axle;
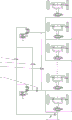
FIG. 2 is a schematic view of a steering system for a plurality of steer axles;
in the figure: 1-an oil tank; 2-a pump source; 3-a pilot oil source; 4-a hydraulic transformer control assembly; 5-a hydraulic transformer; 6-an electromagnetic directional valve; 7-a frame; 8-left steering power cylinder; 9-right steering booster cylinder; 10-vehicle speed sensor; 11-a wheel angle sensor; 12-a servo proportional valve; 13-a pressure sensor; 14-a valve plate corner sensor of the hydraulic transformer; 15-a controller; 16-a safety valve; 17-a first on-off valve; 18-a second on-off valve; 19-a third on/off valve; 20-a fourth switch valve.
Detailed Description
As shown, a hydraulic transformer based heavy duty multi-axle vehicle steering system includes a plurality of sequentially arranged steering axles; a steering power cylinder for driving a steering axle is arranged in the steering axle; the power steering cylinder is connected with the servo proportional valve and the hydraulic transformer combined device; the hydraulic transformer combination device is connected with the controller and adjusts the oil supply pressure of the steering power cylinder according to the instruction of the controller; the hydraulic transformer combination device of each steering axle regulates the pressure of the steering resistance cylinder of the steering axle to which the hydraulic transformer combination device belongs; the hydraulic transformer combination devices are connected to form a hydraulic adjusting loop; the hydraulic pressure regulating loop can simultaneously regulate the pressure of a plurality of steering resistance cylinders under the control of the controller, or regulate and amplify the pressure of a specific steering resistance cylinder; when the hydraulic adjusting circuit is used for steering the vehicle, the controller calculates steering resistance torque according to steering working conditions, and adjusts the pressure adjusting operation of the hydraulic adjusting circuit on each steering power cylinder by changing the series connection mode or the parallel connection mode between each hydraulic transformer combination device and each steering axle steering power cylinder, so that the steering torque of each steering axle for driving a steering axle is adjusted.
The steering power cylinder comprises a left steering power cylinder 8 and a right steering power cylinder 9, and is connected with the hydraulic transformer combination device through a servo proportional valve 12;
the hydraulic transformer combination device comprises a hydraulic transformer 5, a hydraulic transformer control assembly 4, an electromagnetic directional valve 6 for controlling the working state of the hydraulic transformer, a hydraulic transformer valve plate corner sensor 14 and a switching loop for determining the connection mode of the hydraulic transformer in an oil pressure regulating loop;
the hydraulic transformer is respectively connected with the electromagnetic directional valve and the servo proportional valve; the hydraulic transformer control assembly 4 is connected with the pilot oil source 3, and the hydraulic transformer outputs the regulated pressure by controlling the corner of a valve plate of the hydraulic transformer;
the control end of the controller 15 is respectively connected with the controlled end of the hydraulic transformer control assembly, the electromagnetic directional valve and the servo proportional valve and is also connected with a switch valve in a switching loop, and the receiving end of the controller is connected with the vehicle speed sensor 10, the wheel corner sensor 11, the hydraulic transformer valve port plate corner sensor 14 and the pressure sensor 13; the vehicle speed sensor is used for detecting the running speed of the multi-axis vehicle, the wheel corner sensor is used for detecting the corner of the right side or left side wheel of a steering axle of the vehicle, and the pressure sensor is arranged at the servo proportional valve and used for detecting the valve port pressure of the servo proportional valve;
the switching circuit comprises a plurality of switching valves controlled by a controller; the controller calculates the steering resistance torque in the current state according to the vehicle working condition, the wheel state, the steering axle working condition and the valve port pressure, and switches the connection mode of each hydraulic transformer between parallel connection or series connection by controlling the opening and closing state of each switch valve so as to adjust the steering torque output performance of the steering system.
Setting two adjacent steering axles as a first group of steering systems and a second group of steering systems respectively, wherein a hydraulic transformer of the first group of steering systems is a first hydraulic transformer, a hydraulic transformer of the second group of steering systems is a second hydraulic transformer, and in a switching loop connected with the two steering axles, the switching loop is connected with the input end of the first hydraulic transformer and the input end of the second hydraulic transformer through a first switch valve 17, the switching loop is connected with the input end of the first hydraulic transformer and the output end of the second hydraulic transformer through a second switch valve 18, the switching loop is connected with the output end of the first hydraulic transformer and a fourth switch valve of the switching loop through a third switch valve 19, and the switching loop is connected with the output end of the second hydraulic transformer and the third switch valve through a fourth switch valve 20; the input of second hydraulic transformer still is connected with pump source 2, and the output of first hydraulic transformer still is connected with first group of a steering system, and the output of second hydraulic transformer still is connected with second group of a steering system behind the fourth ooff valve.
The port A of the hydraulic transformer 5 is connected with the port A of the electromagnetic directional valve, the port B of the hydraulic transformer 5 is connected with the oil inlet of the servo proportional valve 12, and the port T of the hydraulic transformer 5 is connected with the oil tank 1;
the working state of the hydraulic transformer is determined by the electromagnetic directional valve, when the electromagnetic directional valve keeps a power-off state, the hydraulic transformer works, and pump source oil flows into the hydraulic transformer and is input into the servo proportional valve after being subjected to voltage boosting and reducing; when the electromagnetic directional valve is kept in an electrified state, the hydraulic transformer does not work at the moment, and oil in the oil tank is directly input into the servo proportional valve.
The steering system at the steering axle is an electro-hydraulic servo steering system and comprises an oil tank 1, a hydraulic pump 2, a servo proportional valve 12, a frame 7, a left steering power cylinder 8 and a right steering power cylinder 9; a piston rod of the left steering power-assisted cylinder is hinged with a first trapezoid arm at the wheel, and a cylinder body of the left steering power-assisted cylinder is hinged with the frame; a piston rod of the right steering power-assisted cylinder is hinged with a second trapezoidal arm at the wheel, and a cylinder body of the right steering power-assisted cylinder is also hinged with the frame; a first working oil path R1 is formed by a rod cavity of the left steering power cylinder and a rodless cavity of the right steering power cylinder; a rodless cavity of the left steering power cylinder and a rod cavity of the right steering power cylinder form a second working oil path R2, and the two working oil paths R1 and R2 are respectively connected with a working oil port A, B of the servo proportional valve.
The control method of the steering system of the heavy-duty multi-axle vehicle based on the hydraulic transformer uses the steering system, in the control method, steering axles with similar turning angles and steering resisting moments under normal working conditions of the vehicle are controlled by the same hydraulic transformer, and the steering axles with large turning angle difference and large steering resisting moment difference are respectively controlled by the hydraulic transformers of the respective steering axles.
When the steering axle of the vehicle is in a normal working condition, the flow of the control method comprises the following steps;
step S1: setting a system pump source pressure value as a pressure value matched with medium steering resistance torque of the vehicle;
step S2: the controller receives vehicle speed information detected by a vehicle speed sensor, wheel corner information detected by a corner sensor and valve port pressure information of a servo proportional valve detected by a pressure sensor;
step S3: the controller obtains the steering resisting moment of each steering axle under the current working condition and the steering mode through calculation processing according to the vehicle speed information, the corner information and the pressure information;
step S4: the controller makes the following decisions according to the obtained steering resistance torque of each steering axle:
firstly, when steering shafts controlled by the same hydraulic transformer are in a low steering resistance moment state, the hydraulic transformer works at the moment, so that oil output by a pump source flows into the hydraulic transformer, and the hydraulic transformer performs pressure reduction treatment on the oil pressure flowing into a servo proportional valve;
when the steering shafts controlled by the same hydraulic transformer are in a middle steering resistance moment state, the hydraulic transformer does not work at the moment, and the pressure increasing and reducing treatment is not needed, so that the oil output by the pump source directly flows into the servo proportional valve;
when the steering shafts controlled by the same hydraulic transformer are in a high steering resistance moment state, the hydraulic transformer works at the moment, so that oil output by the pump source flows into the hydraulic transformer, and the hydraulic transformer performs boosting treatment on the pressure of the oil flowing into the servo proportional valve;
step S5: after the controller judges that the hydraulic transformer is in a working state, the expected oil supply pressure of each steering axle steering system is identified according to the steering resistance moment of each steering axle, the controller compares a valve port pressure signal of the servo proportional valve with an expected oil pressure signal, if deviation exists, the controller continuously sends a control signal to a hydraulic transformer control assembly to drive a valve plate of the hydraulic transformer to rotate, and the control angle of the valve plate of the hydraulic transformer is changed, so that the oil pressure input into the servo proportional valve is changed until the steering system reaches the expected oil pressure.
When the vehicle is in a normal running working condition, the hydraulic transformers of the steering axles are connected in parallel, and the hydraulic transformers are controlled to perform pressure increasing and reducing treatment on hydraulic oil output by a single pump source in a primary pressure changing mode according to steering resistance moment information obtained through detection and calculation and input the hydraulic oil into servo proportional valves of the steering axles.
When the vehicle is in the extreme working condition of super large steering resistance moment, the controller detects that the calculated steering resistance moment is sharply increased, and the parallel connection of the hydraulic transformers of each steering axle is changed into series connection through the switching loop, so that the one-level voltage transformation mode of each steering axle is switched into the two-level voltage transformation mode, hydraulic oil output by the pump source is more easily pushed to a steering axle after the two-level pressurization, and the steering is completed by overcoming the steering resistance moment by the multi-axle vehicle.
When the hydraulic transformer control assembly controls the corner of the valve plate of the hydraulic transformer, the control mode is closed-loop feedback control, and the control mode is as follows: when the hydraulic transformer needs to control the oil pressure of the valve port of the servo proportional valve to follow the expected oil pressure signal, the rotating angle of the valve port plate of the hydraulic transformer rotates towards the expected rotating angle indicated by the expected oil pressure signal, namely when the pressure of the valve port of the servo proportional valve is consistent with the expected oil pressure signal, the rotating angle information of the valve port plate is fed back through the rotating angle sensor of the valve port plate at the moment and is used as the expected rotating angle of the closed-loop control of the rotating angle position of the valve port plate, so that the output pressure of the hydraulic transformer can counteract the fluctuation of the output pressure range caused by the small angle deviation before the steering action is finished.
Example (b):
in this example, the multi-axle vehicle is a heavy multi-axle vehicle having common steering modes including a minimum radius steering mode, a crab mode and a highway steering mode, and the pump source 2 draws oil from the tank 1 to supply oil to the steering system.
In each steering mode, in the steering mode with the minimum radius, the vehicle runs at a lower speed, the rotating angle of a front shaft and a rear shaft is maximum, but the rotating angle of an intermediate shaft is smaller, namely the steering resistance torque of the front shaft and the rear shaft is maximum, and the steering resistance torque of the intermediate shaft is smaller; in the crab mode, all the steering shafts have the same rotation angle, namely the steering resistance torque of all the shafts is basically equal; in highway high speed steering mode, the steering axle is subjected to a small steering drag torque, while in highway medium speed steering mode, the steering axle is subjected to a medium steering drag torque.
In this embodiment, for a multi-axis steering system of a vehicle, steering shafts with similar rotation angles and similar steering resisting moments under most normal working conditions are controlled by the same hydraulic transformer, and steering shafts with large difference of the rotation angles and large difference of the steering resisting moments are controlled by respective hydraulic transformers.
In this example, taking a heavy seven-axle vehicle as an example, in the minimum radius steering mode, the vehicle runs at a lower speed, the corners of the front three axles and the rear two axles are the largest, but the corners of the middle two axles are smaller, that is, the steering resistance moments of the front three axles and the rear two axles are the largest, and the steering resistance moments of the middle two axles are smaller; in the crab mode, all the steering shafts have the same rotation angle, namely the steering resistance torque of all the shafts is basically equal; in highway high speed steering mode, the steering axle is subjected to a small steering drag torque, while in highway medium speed steering mode, the steering axle is subjected to a medium steering drag torque. In view of this, three sets of hydraulic transformers may be provided to control the seven-axis steering system, wherein the first hydraulic transformer controls the front three axes, the second hydraulic transformer controls the middle two axes, and the third hydraulic transformer controls the rear two axes.
The control method for the switch valve in the switching circuit is as follows: under normal working conditions, the first switch valve 17 and the fourth switch valve 20 are in a connected state, and the second switch valve 18 and the third switch valve 19 are in a disconnected state, namely, each group of hydraulic transformers are connected with the servo proportional valve of each group of steering shafts in parallel; when the steering system is in an extreme working condition with large steering resistance, the system judges that the pump source pressure still cannot overcome the super-large steering resistance moment under the extreme working condition after being subjected to primary pressurization by the hydraulic transformer, at the moment, the first switch valve 17 and the fourth switch valve 20 are controlled to be in a disconnected state, the second switch valve 18 and the third switch valve 19 are controlled to be in a connected state, namely, all groups of hydraulic transformers are connected in series with the servo proportional valve of each group of steering shaft, so that the output pressures of the hydraulic transformers can be superposed in series, and the pressure of the steering cylinder subjected to secondary pressurization regulation is enough to overcome the transient super-large steering resistance moment, and the steering is smoothly completed.
The above description is only a preferred embodiment of the present invention, but not limited to the preferred embodiment, and it should be noted that, for those skilled in the art, many modifications and decorations can be made without departing from the principle of the present invention, and these modifications and decorations should also be regarded as the protection scope of the present invention.
Claims (9)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110317079.0A CN112918552B (en) | 2021-03-25 | 2021-03-25 | Heavy multi-axle vehicle steering system based on hydraulic transformer and control method thereof |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110317079.0A CN112918552B (en) | 2021-03-25 | 2021-03-25 | Heavy multi-axle vehicle steering system based on hydraulic transformer and control method thereof |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN112918552A CN112918552A (en) | 2021-06-08 |
| CN112918552B true CN112918552B (en) | 2022-03-08 |
Family
ID=76175887
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202110317079.0A Active CN112918552B (en) | 2021-03-25 | 2021-03-25 | Heavy multi-axle vehicle steering system based on hydraulic transformer and control method thereof |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN112918552B (en) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115257918B (en) * | 2022-09-06 | 2024-05-03 | 一汽解放汽车有限公司 | Electronic hydraulic power-assisted steering system, vehicle and control method |
| CN115465359B (en) * | 2022-09-15 | 2024-11-05 | 泰安航天特种车有限公司 | Modularized electrohydraulic steering system of extra-heavy electric drive multi-axle vehicle and control method |
| CN118651305A (en) * | 2024-07-09 | 2024-09-17 | 江苏徐工工程机械研究院有限公司 | Engineering vehicle and steering control method thereof |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1820715A1 (en) * | 2006-02-21 | 2007-08-22 | Kobelco Cranes Co., Ltd. | Multi-axle vehicle |
| CN103552454A (en) * | 2013-10-16 | 2014-02-05 | 吉林大学 | Series-parallel hydraulic drive hybrid power vehicle power assembly system |
| CN104443025A (en) * | 2014-11-08 | 2015-03-25 | 福州大学 | Electro-hydraulic servo pure rolling steering system for multi-axis vehicle and control method |
| WO2015191661A1 (en) * | 2014-06-10 | 2015-12-17 | Eaton Corporation | Energy recovery system for off-highway vehicles with hydraulic transformer coupled to transmission power take-off |
| CN106884824A (en) * | 2017-04-07 | 2017-06-23 | 江苏师范大学 | A kind of pressure-transforming energy-saving threeway proportional flow commutator |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102372022B (en) * | 2010-08-26 | 2013-06-05 | 中联重科股份有限公司 | Multi-axle vehicle electro-hydraulic servo steering system, steering control method and multi-axle vehicle |
| CN111152835B (en) * | 2020-01-13 | 2020-11-06 | 南京航空航天大学 | Drive-by-wire electro-hydraulic steering system based on double-winding motor and hybrid control method |
-
2021
- 2021-03-25 CN CN202110317079.0A patent/CN112918552B/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1820715A1 (en) * | 2006-02-21 | 2007-08-22 | Kobelco Cranes Co., Ltd. | Multi-axle vehicle |
| CN103552454A (en) * | 2013-10-16 | 2014-02-05 | 吉林大学 | Series-parallel hydraulic drive hybrid power vehicle power assembly system |
| WO2015191661A1 (en) * | 2014-06-10 | 2015-12-17 | Eaton Corporation | Energy recovery system for off-highway vehicles with hydraulic transformer coupled to transmission power take-off |
| CN104443025A (en) * | 2014-11-08 | 2015-03-25 | 福州大学 | Electro-hydraulic servo pure rolling steering system for multi-axis vehicle and control method |
| CN106884824A (en) * | 2017-04-07 | 2017-06-23 | 江苏师范大学 | A kind of pressure-transforming energy-saving threeway proportional flow commutator |
Also Published As
| Publication number | Publication date |
|---|---|
| CN112918552A (en) | 2021-06-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN112918552B (en) | Heavy multi-axle vehicle steering system based on hydraulic transformer and control method thereof | |
| WO2012024935A1 (en) | Electro-hydraulic servo steering system and steering contorl method for multi-axle vehicle and multi-axle vehicle | |
| US6122912A (en) | Electro-hydraulic power steering systems having improved efficiency | |
| CN203427872U (en) | Wheeled crane and steering hydraulic control system thereof | |
| CN104608819B (en) | Multi-axle steering system for multi-axle vehicles and multi-axle vehicles | |
| CN102530064B (en) | Construction Machinery Vehicle, Vehicle Steering Follow-up Control System and Method | |
| CN105253192A (en) | Automobile electric hydraulic power steering system control method | |
| US10160282B2 (en) | Hydro-mechanical suspension for vehicle | |
| CN103790876B (en) | A kind of Closed circuit hydraulic transmission system | |
| CN102485573A (en) | A walking assembly and control method of a tracked engineering vehicle | |
| CN112172918B (en) | Double-closed-loop control system and method for multi-axis electro-hydraulic steering system | |
| JP3108715B2 (en) | Servo control device, especially power steering device for automobile | |
| CN110285102A (en) | Multi-axle emergency rescue vehicle hydraulic steering control system with active suspension | |
| CN106627754A (en) | Centering oil cylinder control system and method, electro-hydraulic control steering system and engineering vehicle | |
| CN202946483U (en) | Hydraulic pump control system, vehicle and its steering hydraulic system | |
| US9995387B2 (en) | Hydrostatic traction drive system | |
| WO2006047793A1 (en) | Force-based power steering system | |
| US12459568B2 (en) | Hydrostatic traction drive for a laterally-steered vehicle and hydrostatic drive for a laterally-steered mobile work machine | |
| CN108349531A (en) | Steering and method for running steering | |
| CN115009998B (en) | Tire type counterweight trolley hydraulic control system and crane | |
| CN102390428A (en) | Control method of steering central shaft and hydraulic control system | |
| CN111634328B (en) | Hydraulic auxiliary controlled electric independent steering system and electric vehicle | |
| WO2006042250A1 (en) | Force-based power steering system | |
| CN103407488B (en) | Wheel type crane and steering hydraulic control system thereof | |
| Barua et al. | Conventional power steering system of vehicle and continuous improvement |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |